
Autonomous Cyber Defence by Quantum-Inspired Deep Reinforcement
Learning
Wenbo Feng, Sanyam Vyas and Tingting Li
School of Computer Science and Informatics, Cardiff University, U.K.
Keywords:
Autonomous Cyber Defence, Reinforcement Learning, Quantum Computing.
Abstract:
With the rapid advancement of computing technologies, the frequency and complexity of cyber-attacks have
escalated. Autonomous Cyber Defence (ACD) has emerged to combat these threats, aiming to train defen-
sive agents that can autonomously respond to cyber incidents at machine speed and scale, similar to human
defenders. One of the main challenges in ACD is enhancing the training efficiency of defensive agents in
complex network environments, typically using Deep Reinforcement Learning (DRL). This work addresses
this challenge by employing quantum-inspired methods. When coupled with Quantum-Inspired Experience
Replay (QER) buffers and the Quantum Approximate Optimization Algorithm (QAOA), we demonstrate an
improvement in training the defence agents against attacking agents in real-world scenarios. While QER
and QAOA show great potential for enhancing agent performance, they introduce substantial computational
demands and complexity, particularly during the training phase. To address this, we also explore a more prac-
tical and efficient approach by using QAOA with Prioritised Experience Replay (PER), achieving a balance
between computational feasibility and performance.
1 INTRODUCTION
Within the field of cybersecurity, the interaction be-
tween defenders and attackers is fundamentally im-
balanced. Defenders must remain in a constant state
of vigilance, identifying and responding to every po-
tential threat, while attackers need only to succeed
once to achieve their objectives. This significant dis-
parity highlights the urgent need for sophisticated and
adaptable defences that can promptly and comprehen-
sively counter attacks. AI offers promising opportu-
nities to develop such defences, particularly through
Autonomous Cyber Defence (ACD) using Reinforce-
ment Learning (RL) and Game Theory. The aim
of ACD is to train defensive agents which can au-
tonomously react to cyber incidents like human de-
fenders. These agents are expected to not only detect
malicious behaviours in real-time but also execute ad-
vanced defensive actions such as system hardening,
isolating, deploying decoys and recovery at machine
speed and scale.
Deep Reinforcement Learning (DRL) has been
widely used to design and train such defensive agents
(Vyas et al., 2023; Shen et al., 2024) to learn op-
timal policies for strategic response in dynamic and
adversarial environments. However, while facing a
complex network environment, it is very challenging
to train defensive agents with traditional DRL effi-
ciently. Based on that, this work aims to enhance
the performance of DRL with quantum computing
methods in order to further accelerate the training
of defensive agents. Specifically, we use Quantum-
Inspired Experience Replay (QER) to optimize explo-
ration and empirical replay techniques in DRL, and
we utilize the Quantum Approximate Optimization
Algorithm (QAOA) to improve the training efficiency
of defensive agents.
We demonstrate our approach using a set of re-
alistic scenarios built in the OpenAI Gym interface
from the well-known autonomous defence competi-
tion CAGE Challenge (Standen et al., 2022). It al-
lows us to rigorously assess and analyse the proposed
quantum-inspired approach. The key innovative con-
tributions of this work are summarised as follows:
• Optimizing Experience Replay: This work en-
hances traditional DRL algorithms in ACD by in-
troducing Quantum-inspired Experience Replay,
improving storage and retrieval efficiency using
quantum computing features.
• QAOA in Defence Training: The QAOA is used to
train and test defensive agents in a quantum com-
puting environment, integrating it with CybORG,
184
Feng, W., Vyas, S. and Li, T.
Autonomous Cyber Defence by Quantum-Inspired Deep Reinforcement Learning.
DOI: 10.5220/0013151800003899
In Proceedings of the 11th International Conference on Information Systems Security and Privacy (ICISSP 2025) - Volume 2, pages 184-191
ISBN: 978-989-758-735-1; ISSN: 2184-4356
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

a research platform by OpenAI Gym for training
autonomous agents. We optimize QAOA parame-
ters to boost the effectiveness of defensive strate-
gies in cybersecurity.
• QAOA and MDP Integration: QAOA is com-
bined with Markov Decision Processes to improve
decision-making for defensive agents. Quan-
tum states represent MDP states, parameter ad-
justments are actions, and optimization outcomes
serve as rewards, achieving synergy between
quantum and classical computing.
In the following sections, we begin with a discussion
of underpinning technologies in Section 2, followed
by the integration of quantum-inspired methods into
ACD in Section 3. Relevant results of the proposed
approach are presented in Section 4. The paper con-
cludes with a discussion of the limitations and poten-
tial directions for further research in this area.
2 RELATED WORK
In this section, we discuss the key technologies
and methodologies relevant to our work, focusing
on Deep Reinforcement Learning (DRL) in game-
theoretic contexts for autonomous network defence
and the role of Replay Buffer techniques.
2.1 DRL Based Game Theory for
Autonomous Network Defence
Intelligent game countermeasure technology plays a
critical role in ACD particularly through the use of
DRL algorithms to tackle sequential decision-making
problems in adversarial environments. One of the ear-
liest approaches to applying DRL in game-theoretic
models is the Least Squares Policy Iteration (LSPI)
algorithm which was expanded by (Lagoudakis and
Parr, 2012) to include zero-sum Markov games. This
work demonstrated the effectiveness of this method
in various scenarios, and illustrated the challenges
and advantages of using value function approximation
in Markov games, which induced further exploration
into applying DRL in competitive environments.
Markov Games have been utilised in several do-
mains of cyber security operations to provide a
framework for modelling adversarial scenarios. For
instance, Benaddi et al. (Benaddi et al., 2022)
developed a stochastic game model that incorpo-
rates Markov Decision Processes (MDP) to improve
decision-making in intrusion detection systems (IDS)
and to analyse the behaviour of IDS. Using a Partially
Observable Markov Decision Process (POMDP) and
recurrent-aided DQN, Liu et al. (Liu et al., 2021) in-
troduced a network defence framework that dynami-
cally converges to optimal defence tactics in the pres-
ence of partial rationality and imperfect knowledge.
The applications demonstrate the adaptability and ef-
ficacy of Markov Games in modelling and resolving
network defence problems.
The integration of DRL with Markov Games has
demonstrated promising results in autonomous net-
work defence, with DRL methods such as Double
DQN, PPO, and A3C, showing significant improve-
ment in policy optimization for adversarial settings.
Double DQN, enhanced with experience replay and
target networks has effectively addressed training in-
stability, rendering it well-suited for dynamic network
defence scenarios. Similarly, PPO is the preferred op-
tion for continuous control tasks for security applica-
tions due to its resilience and effectiveness in policy
optimization, ensuring more effective defence mech-
anisms in complex, adversarial environments.
2.2 Replay Buffer
Experience Replay, commonly referred to as Replay
Buffer, is an essential element in many DRL architec-
tures. An agent’s experiences (state, action, reward,
next state and done flag) during interactions with the
environment are stored in the replay buffer. A sig-
nificant benefit of using a replay buffer is its ability
to break temporal connections between successive in-
teractions, which ensures the stability of the learning
process and improves sample efficiency. Several vari-
ations of the replay buffer, including Prioritized Ex-
perience Replay (PER) (Schaul et al., 2015), Hind-
sight Experience Replay (HER)(Andrychowicz et al.,
2017b), and Quantum-Inspired Replay (QER) (Wei
et al., 2021), have been developed to further optimize
the learning process.
Schaul and colleagues (Andrychowicz et al.,
2017a) proved the efficacy of Prioritized Experi-
ence Replay (PER) using the Atari 2600 benchmark
suite. The implementation demonstrated notable im-
provements in learning efficiency and performance
compared to the traditional uniform sampling ap-
proach through prioritising more informative transi-
tions. This mechanism directs the learning process
towards the most valuable experiences resulting in
faster convergence.
Andrychowicz et al.(Andrychowicz et al., 2017a)
introduced the HER algorithm in robotic manipula-
tion tasks, including block stacking and fetch reach.
In these tasks, the robot acquires knowledge to ac-
complish objectives by considering unsuccessful at-
tempts as successes in attaining other goals. Imple-
Autonomous Cyber Defence by Quantum-Inspired Deep Reinforcement Learning
185

menting this method greatly improved sample effi-
ciency and success rates in tasks with few rewards,
demonstrating its practical usefulness in solving com-
plex tasks with limited feedback.
In our work, we utilised QER to enhance the per-
formance of DRL to train the defensive agents by
manipulating quantum information. More details are
provided in Section 3.1
2.3 Exploration-Exploitation Policy
The Exploration-Exploitation Policy is key to build-
ing an effective DDQN algorithm. This work primar-
ily uses the ε-greedy policy and Boltzmann strategy
(Cercignani and Cercignani, 1988).
The ε-greedy policy selects the action with the
highest Q-value most of the time but explores by
choosing a random action with probability ε. This
balances exploiting known optimal actions and ex-
ploring new ones, addressing the risk of being trapped
in suboptimal solutions due to inaccurate Q-value es-
timations (Hasselt et al., 2016):
a =
argmax
a
Q(s, a) with prob. 1 − ε
random action with prob. ε
Here, ε controls the exploration probability but
does not consider the relative Q-values of actions,
leading to equally random choices even for slightly
suboptimal actions.
The Boltzmann strategy improves exploration by
using a probability distribution proportional to Q-
values, introducing more informed action selection.
It incorporates a temperature parameter τ to control
randomness, with the selection probability given by:
P(a|s) =
exp
Q(s,a)
τ
∑
b
exp
Q(s,b)
τ
. Higher τ increases random-
ness, while lower τ approaches greedy behaviour.
This method prioritizes higher Q-value actions and
smoothens the probability mapping.
We found that combining ε-greedy with Boltz-
mann yields better results. ε-greedy alone struggles
when ε drops to 0.01, as exploration becomes insuf-
ficient and score optimization becomes inconsistent.
A hybrid approach, where Boltzmann is applied with
a predefined probability when ε is minimal, enhances
performance and ensures more consistent updates.
3 QUANTUM-INSPIRED
AUTONOMOUS DEFENCE
AGENTS
In this section, we first discuss the Quantum-inspired
Experience Replay (QER), which is followed by the
other important component of our approach – Quan-
tum Approximate Optimization Algorithm (QAOA).
We then discuss how they were integrated with
Markov Game and contribute to our final approach.
3.1 QER
Quantum-inspired experience replay (QER) com-
bines ideas from quantum computing with DRL to
make better use of experience samples and boost the
performance of traditional experience replay buffers
by manipulating quantum information. By represent-
ing and manipulating quantum states, QER allows RL
models to select and process training samples more
efficiently, thereby accelerating convergence and im-
proving policy performance (Wei et al., 2021).
In QER, each empirical sample is represented as
a quantum state. Specifically, an empirical e
k
can
be represented by the state of a quantum bit (qubit)
which is: |ψ
(k)
⟩ = b
(k)
0
|0⟩ + b
(k)
1
|1⟩ Here, b
(k)
0
and b
(k)
1
are two probability magnitudes indicating the likeli-
hood of the empirical sample being rejected or ac-
cepted, respectively. This quantum state satisfies the
normalization condition: |b
(k)
0
|
2
+ |b
(k)
1
|
2
= 1, where
b
(k)
0
and b
(k)
1
can be initialized and adjusted based on
the quality of the experience, e.g., Temporal Differ-
ential (TD) error, making the selection of experience
quantum-inspired.
QER introduces two key quantum operations to
dynamically adjust the probability magnitude of em-
pirical samples: the preparation operation and the de-
preciation operation.
The preparation operation aims to increase the se-
lection probability of empirical data, targeting sam-
ples with higher TD errors. Specifically, the Grover
iteration algorithm, a classical method, is used to sam-
ple the quantum state of experience. This quantum
algorithm effectively amplifies the probability ampli-
tude of the target state. Each iteration updates the
quantum state of the empirical sample by using the
following rotation matrix:
U
σ
=
cos(σ) −sin(σ)
sin(σ) cos(σ)
where σ is a rotation angle usually dynamically ad-
justed according to the empirical TD error. Through
multiple iterations, the probability magnitude b
(k)
1
of
empirical samples with higher TD errors will be sig-
nificantly increased, prioritizing these samples for se-
lection during playback.
The depreciation operation aims to prevent cer-
tain empirical samples from being overused in train-
ing, i.e., to prevent overfitting caused by excessive re-
ICISSP 2025 - 11th International Conference on Information Systems Security and Privacy
186
play. Whenever an empirical sample is used, the de-
preciation operation reduces its selection probability
through a quantum rotation operation, allowing other
samples to be selected. The devaluation operation is
realized by the following rotation matrix:
U
ω
=
cos(ω) −sin(ω)
sin(ω) cos(ω)
where ω is a depreciation factor that decreases as
the empirical samples are replayed more frequently.
This operation ensures that the selection of empirical
samples is diversified and representative, preventing
the model from falling into local optima.
In practice, QER integrates these quantum oper-
ations into the experience replay buffer. Whenever
an empirical sample is selected for training, a depre-
ciation operation adjusts its quantum state to reduce
the probability of future selection. Conversely, if an
empirical sample has a high TD error, the prepara-
tion operation increases its probability of being se-
lected. The introduction of these quantum opera-
tions enhances the utilization of empirical samples,
ensuring that the model can fully explore the envi-
ronment while efficiently leveraging important sam-
ples during training, thereby improving overall learn-
ing efficiency and policy performance. The specific
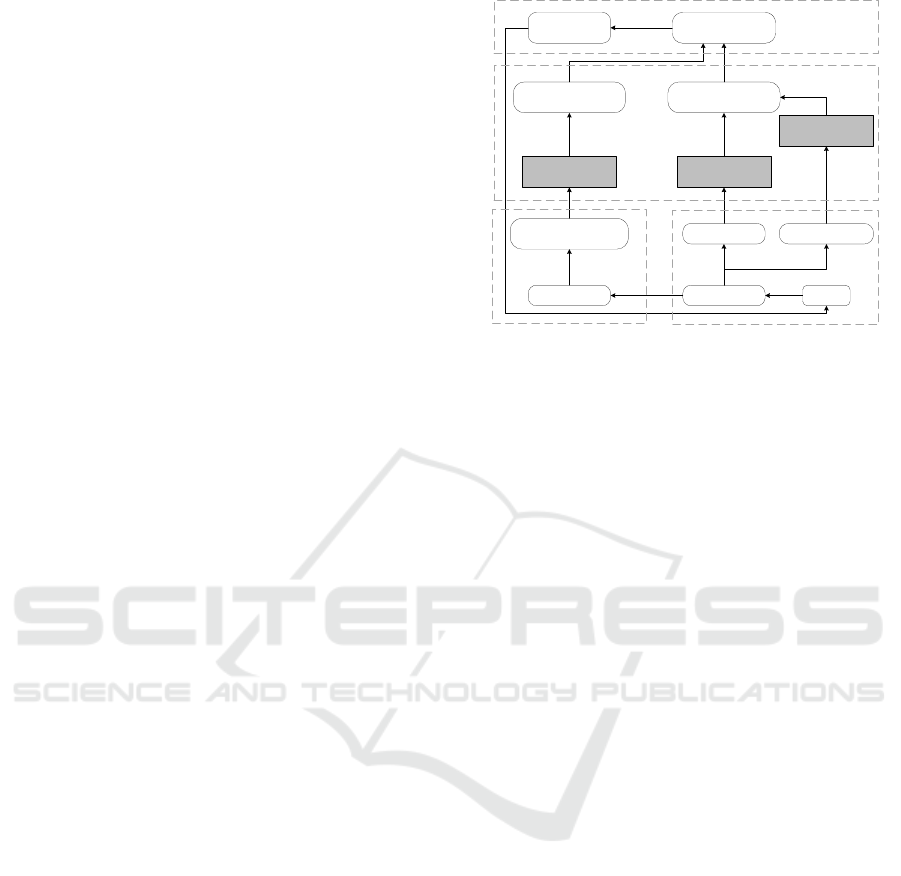
implementation of QER is shown in Figure 1. This
framework integrates quantum principles into DRL
by means of QER. Starting with raw Experience data,
the experiences are encoded into a Quantum represen-
tation of experience (Step 1), followed by a Prepa-
ration operation that generates a Superposition state
with an amplitude (Step 2). In Step 3, a Mini-batch
of these quantum experiences is sampled from Quan-
tum Composite Systems as a Buffer. After interaction
with the Environment (Step 4), the agent computes a
new TD-error, which is used to update the amplitudes
of the quantum state through a second Preparation
operation (Step 5). This quantum-enhanced replay
mechanism improves the efficiency and effectiveness
of agent’s learning in DRL systems.
3.2 QAOA
QAOA is a hybrid quantum-classical variational opti-
mization method designed to solve combinatorial op-
timization problems. It combines quantum state evo-
lution with classical optimization algorithms to ap-
proximate the optimal solution by tuning a series of
parameters. Current noisy intermediate-scale quan-
tum (NISQ) devices work well with the algorithm,
and it can provide effective approximate optimiza-
tion solutions in complicated quantum systems. The
main idea behind QAOA is to use a set of controlled
Mini-batch data
Quantum Composite
Systems as Buffer
Superposition state
with certain amplitude
Superposition state
with updated amplitude
Quantum representation
of experience
Experience Environment Agent
New TD-error New replayed time
Depreciation
operation
Preparation
operation
Preparation
operation
Step 1
Step 2
Step 5
Step 3
Step 4
Figure 1: Framework of Deep Reinforcement Learning with
Quantum Experience Replay(QER) (Wei et al., 2021).
quantum gate operations on a quantum state and then
change the parameters of these operations to use a
classical optimization algorithm to find the small-
est objective function (Zhou et al., 2020). Specifi-
cally, the Problem Hamiltonian Volume is defined
as
ˆ
H
z
= −J
∑
N
j=1
σ
z
j
σ
z
j+1
where σ
z
j
is the Pauli-Z op-
erator of the Jth quantum bit.
ˆ
H
x
denotes Yokohama
Hamiltonian Volume
ˆ
H
x
= −
∑
N
j=1
σ
x
j
where σ
x
j
is the
textitPauli-X operator of the Jth quantum bit. Based
on that, the Quantum State Evolution can be defined
as below
|ψ
P
(γ, β)⟩ =
P
∏
t=1
e
−iβ
t
ˆ
H
x
e
−iγ
t
ˆ
H
z
!
|+⟩
Amongst them, γ = (γ
1
, γ
2
, . . . , γ
P
) and
β = (β
1
, β
2
, . . . , β
P
) is a 2P real number param-
eter.
ˆ
H
z
is the problem Hamiltonian, whose ground
state is the solution sought.
ˆ
H
x
is the transverse field
term used to drive the quantum state evolution. As a
result, the variational energy is denoted as:
E
P
(γ, β) = ⟨ψ
P
(γ, β)|
ˆ
H
z
|ψ
P
(γ, β)⟩
where |ψ
P
(γ, β) is the quantum state after the P-
round operation. The optimization is carried out using
QAOA. As shown in Algorithm 1, the quantum state
evolves through successive applications of the prob-
lem and mixer Hamiltonians. γ and β are iteratively
adjusted to minimise the cost function E
P
(γ, β).
3.3 Combination of QAOA and MDP
In the combination of the QAOA and MDP, the pa-
rameter optimization problem of QAOA is naturally
integrated into the MDP framework, enhancing the
decision-making capability of the defensive agent in
Autonomous Cyber Defence by Quantum-Inspired Deep Reinforcement Learning
187

Algorithm 1: Quantum State Evolution & Optimization.
Data: Initial parameters γ
0
, β
0
, number of steps P
Result: Optimized quantum state minimizing
E
P
(γ, β)
Initialize the quantum state ψ
0
(γ
0
, β
0
);
for t = 1 to P do
Update state with
ˆ
H
z
: |ψ
′
t
⟩ = e
−iγ
t
ˆ
H
z
|ψ
t−1
⟩;
Update state with
ˆ
H
x
: |ψ
t
⟩ = e
−iβ
t
ˆ
H
x
|ψ
′
t
⟩;
if E
P
(γ, β) not minimized then
Adjust parameters γ, β;
Optimize E
P
(γ, β);
end
else
Continue to the next iteration;
end
end
complex network environments. Through this com-
bination, QAOA not only relies on a fixed quantum
computational process but also flexibly utilizes classi-
cal RL algorithms for adaptive optimization, thereby
enabling more effective defence strategies.
In this framework, the quantum states in the
QAOA are considered as “states” in the MDP. These
quantum states can usually be described by amplitude
or probability distributions. These states carry all the
current information about the system, and each state
reflects the configuration and evolutionary outcome of
QAOA at a particular step.
Actions in MDP are represented in QAOA as the
adjustment of QAOA parameters γ
t
and β
t
at each
step. Each action involves choosing specific values
for γ
t
and β
t
in a given state, guiding the quantum
state’s evolution towards a more optimal state. The
action space is therefore a multidimensional continu-
ous space, where each dimension represents a degree
of freedom in the QAOA parameters.
State transfer in QAOA is realised through specific
quantum operations. These operations correspond to
applications of classical quantum gate operations or
Hamiltonian terms. In the MDP framework, each ac-
tion (i.e., the choice of γ
t
and β
t
) leads to the current
quantum state |ψ
P
(γ, β) to evolve to the next quantum
state. This evolution follows the Schr
¨
odinger equa-
tion and is guided by the design principles of QAOA.
In the combination of QAOA and MDP, the re-
ward function is typically related to the optimization
result of the objective function. Specifically, the re-
ward in the MDP is designed as the negative objective
function value −C(γ, β) where C(γ, β) is the distance
or difference between the quantum state and the target
state. This design transforms optimizing the QAOA
parameters into maximizing the cumulative reward.
By combining this with MDP, we can view the pa-
rameter optimisation process of QAOA as a strategy
optimisation problem. We can use classical reinforce-
ment learning algorithms like Q-learning or Proximal
Policy Optimisation (PPO) to learn and optimise these
strategies. Through continuous iteration, the system
can select the optimal values in each state, maximiz-
ing the cumulative reward and enabling the effective
use of quantum computing.
In the MDP, the termination condition of QAOA
can be set to occur after all steps are completed or
when the objective function reaches a preset optimal
solution. By stopping the QAOA after achieving the
optimal quantum state, this termination condition en-
hances the computing efficiency and effectiveness.
The algorithmic overview is provided in Algo-
rithm 2 to illustrate the structured approach to opti-
mise policy and state value parameters iteratively.
Algorithm 2: Quantum Reinforcement Learning.
Input: Initial policy parameters θ
0
, initial state
value parameters V
Π
θ
0
Output: Optimized policy parameters θ
∗
,
optimized state value parameters V
Π
θ
∗
for k = 0, 1, 2, . . . do
Sampling N
epi
episodes:
for i = 1 to N
epi
do
Initialize state S
1
for t = 1 to P do
Sample action a
t
from policy
Π
θ
k
(a
t
|O
t−1
)
Observe new state S
t
and reward r
t
Update state S
t
= |ψ
t−1
⟩ using
environment dynamics
e
−iβ
t
ˆ
H
x
e
−iγ
t
ˆ
H
z
|ψ
t−1
⟩
end
Store episode (S
1
, a
1
)
i
, . . . , (S
P
, a
P
)
i
and
rewards r
i
1
, . . . , r
i
P
end
Policy update:
Update policy parameters θ
k+1
using collected
episodes
State value (SV) update:
Update state value parameters V
Π
θ
k+1
using
collected episodes
end
4 RESULTS AND EVALUATION
4.1 Experimental Settings
We used CAGE challenge 2 scenarios (Kiely et al.,
2023) to evaluate our improved models in CybORG
(Baillie et al., 2020). This challenge requires devel-
oping a blue agent to autonomously defend a network
against a red agent. A typical network is constructed
with three subnets: Subnet 1 (non-critical user hosts),
ICISSP 2025 - 11th International Conference on Information Systems Security and Privacy
188
Subnet 2 (enterprise servers), and Subnet 3 (a critical
operational server plus three user hosts).
Each episode has a fixed number of steps. At
each step, both red and blue agents choose actions
from a high-level list. CybORG then instantiates and
executes these actions, determining their real-world
effects. High-level attack actions include Discover
Remote Systems, Discover Network Services, Exploit
Network Services, Privilege Escalation, and Impact,
each instantiated with details like IPs, ports, and ses-
sions.
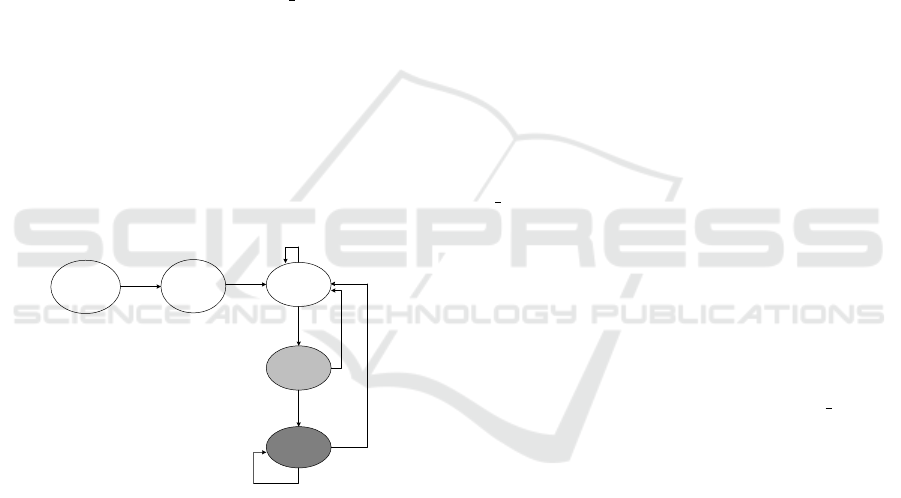
As shown in Figure 2, each run starts with the
red agent controlling a host in Subnet 1. The red
agent then performs reconnaissance, exploits enter-
prise servers (Subnet 2), escalates privileges, and fi-
nally tries to impact the operational server (Subnet
3). Two red agents were used: B line, which ran-
domly selects attacks, and Meander, which method-
ically compromises each subnet in turn.
The blue agent monitors hosts and can terminate
red access or restore systems. Restoration halts the
red agent but disrupts users, and the red agent remains
on the foothold host, simulating persistent threats.
The blue agent can also deploy decoys; if the red
agent escalates on a decoy, it fails and is removed,
forcing it to exploit a real service.
Unknown Host
Host,
Services
Unknown
Host,
Services
Known
Exploited
Host (User)
Exploited
Host (Root)
Discover
Remote
Systems
Discover
Network
Services
Failed Exploit
Restore
Machine
Remove
Program
Successful
Exploit
Impact
Privilege
Escalation
Figure 2: Effect of high-level actions on host state. Con-
textual information instantiates each high-level action, de-
termining the impact of each attack (Kiely et al., 2023).
The reward function penalizes the blue agent
based on the red agent’s access level, with the heaviest
penalty if the operational server is impacted. There is
also a penalty for restoring hosts, discouraging sim-
ple recovery strategies and encouraging more strate-
gic and stable defense.
The evaluation method is based on the criteria pro-
vided by the CAGE challenge in terms of trial lengths
and red agents. We ran experiments with various
trail lengths: 30, 50, and 100 steps. Different types
of red agents were implemented: Meander (explore
randomly), B-line (moves directly to the operational
server), Sleep (no action). For each combination of
trial length and red agent, CybORG is executed over
10 episodes, leading to a total of 1,000 episodes, with
the blue agent’s total reward recorded and presented
in Table 1. We used Intel Core i7-8750H with 16 GB
RAM for all our experiments.
4.2 Evaluation Results
In this section, we present the results of our experi-
ments to evaluate the improved learning efficiency of
defensive agents in large-scale network environments
using the proposed optimisation strategies. We first
present the baseline results with DDQN in Section
4.2.1. We then investigate how the QER buffers im-
prove the efficiency of storing and retrieving experi-
ence samples, thereby enhancing the performance of
defensive agents in Section 4.2.2. With the combina-
tion of QAOA, DRL further improves the decision-
making ability of defensive agents in complex net-
work environments, discussed in Section 4.2.3.
4.2.1 DDQN Algorithm
In the initial strategy, the red agent ”Meander” and
”B line” were trained independently. While this ap-
proach showed some effectiveness in their respective
environments, the trained blue agent exhibited limi-
tations in more complex environments, particularly a
lack of robustness when dealing with a wide range
of scenarios. To address these limitations, some ad-
justments were made to the original training strat-
egy: (i) increasing the number of epochs to enhance
the learning depth and adaptability of the model, and
(ii) combining the agents ”Meander” and ”b line” for
hybrid training by using random functions to select
the two strategies. This improved approach not only
retains the strengths of their respective strategy, but
also can enable more flexible responses to dynamic
environments, which provides a better balance be-
tween exploration and exploitation, and an improved
robustness of the model.
As a baseline model, DDQN demonstrated sta-
ble performance in standard environments. However,
test results showed that DDQN performed poorly in
large-scale network environments with varying trial
lengths. Its singular exploration strategy restricts
learning efficiency and hinders the agent’s ability to
adapt to evolving threats. To address this, we intro-
duced the Boltzmann strategy (Cercignani and Cer-
cignani, 1988) into the model, which provides the
agent with more flexibility in action selection through
a probability distribution. It encourages the agent to
explore actions with lower Q-values that might be
overlooked under the traditional ε-greedy. Experi-
Autonomous Cyber Defence by Quantum-Inspired Deep Reinforcement Learning
189
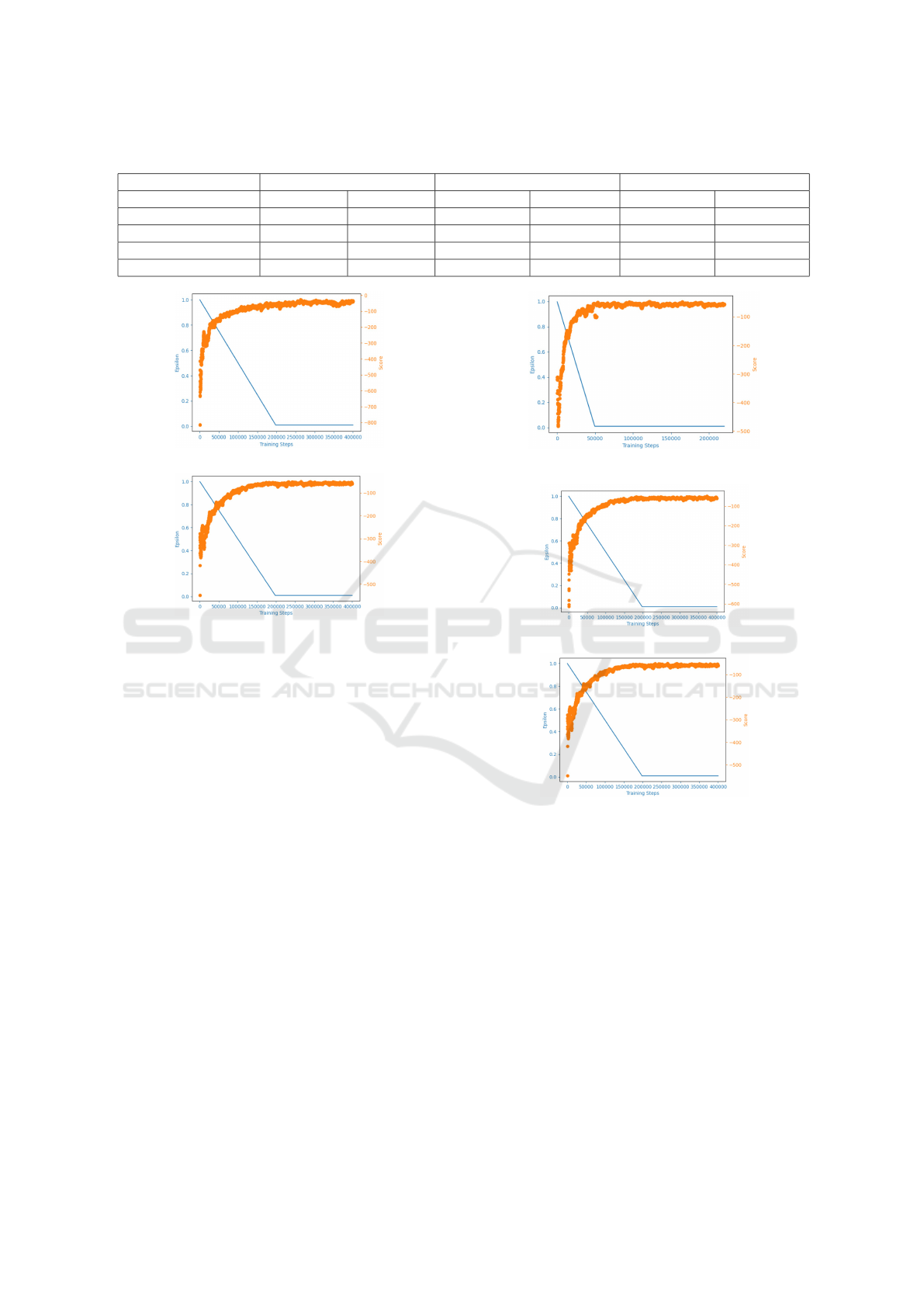
Table 1: Evaluation individual average rewards.
30 steps trial length 50 steps trial length 100 steps trial length
Blue Agent B-line Meander B-line Meander B-line Meander
DDQN -14.67±6.52 -16.38±5.25 -29.50±13.34 56.97±14.50 -71.43±30.63 100.32±50.3
DDQN + Boltzmann -12.43±5.00 -12.07±2.07 -25.00±13.12 -24.43±5.80 -65.26±30.33 -60.88±17.10
DDQN + QER -11.32±5.93 -10.32±4.67 -20.22±14.28 -17.49±6.23 -62.95±28.68 -44.50±22.95
DDQN + QAOA -6.91±4.38 -5.77±1.79 -12.95±6.07 -10.69±3.88 -31.19±14.09 -22.30±7.66
(a)
(b)
Figure 3: DDQN Training with standard strategy (a) vs.
with Boltzmann Strategy (b).
mental results show that after the ε-greedy strategy
drops to its lowest value (min = 0.01), the Boltzmann
strategy smooths the transition and avoids a drop in
agent performance. In the trials of ”Meander” and
”B-line” as shown in Figure 3b, the scores improved
compared to the standard DDQN as in Figure 3a, en-
hancing the overall learning efficiency.
4.2.2 DDQN with QER
We introduced a QER in this set of experiments. QER
leverages the superposition and probability distribu-
tion properties of quantum states to enable more ef-
ficient selection and replay of experience samples.
Experimental results (as shown in Figure 4) indi-
cate that QER provides better performance in high-
dimensional policy spaces, particularly in the B-line
and Meander trials, with outcomes comparable to
those achieved by the baseline DDQN model.
4.2.3 DDQN with QAOA
In this set of experiments, we combine QAOA with
DDQN. Although the QER buffer demonstrates good
performance, its complexity and high demand for
Figure 4: The training of DDQN with QER.
(a)
(b)
Figure 5: The training record of DDQN algorithm with PER
(a) and with QAOA (b).
computational resources make it challenging to in-
tegrate with QAOA. Due to resource constraints, we
were unable to fully explore the potential of combin-
ing the QER buffer and QAOA optimization. As a
result, we opted to use the priority experience replay
(PER) buffer instead for this set of experiments.
The training records are shown in Figure 5a and
5b. Experimental results indicate that this combina-
tion offers better performance in both B-line and Me-
ander trials. The integration of QAOA further en-
hances the system’s robustness, allowing the defen-
sive agent to make more accurate and efficient deci-
sions when confronting complex threats.Finally, a de-
ICISSP 2025 - 11th International Conference on Information Systems Security and Privacy
190

tailed comparison of the performance of these differ-
ent strategy combinations is presented in Table 1.
5 CONCLUSION AND FUTURE
WORK
In conclusion, this work demonstrated the potential of
quantum-inspired techniques—QAOA and QER—to
improve the training efficiency of defensive agents
in Autonomous Cyber Defence. As cyber-attacks
grow increasingly complex, the integration of these
methods with DRL can enhance decision-making and
responsiveness against threats, including APTs and
zero-day exploits (Li and Hankin, 2017).
QER buffers represent a substantial improvement
in experience sampling, leveraging quantum-inspired
principles to produce more diverse and representa-
tive memory retrieval. This leads to more effective
learning and enhanced defensive capabilities. Mean-
while, integrating QAOA with DRL helps solve com-
plex optimization tasks, enabling agents to navigate
intricate decision spaces and yield globally optimized
solutions. This combined approach strengthens agent
adaptability, producing more robust strategies for
managing sophisticated cyber threats.
However, quantum-inspired methods impose
computational demands and complexity. Although
employing DDQN, Boltzmann strategies, and PER
yielded a balance between performance and feasibil-
ity, current quantum resources are limited. Simulating
quantum computing on classical hardware can intro-
duce bottlenecks that affect scalability and realism.
Future research should focus on larger, more com-
plex environments and real-world scenarios. Val-
idating these techniques outside simulated settings
will help identify challenges and guide practical de-
ployments. Further exploration of QER’s underly-
ing mechanisms, dynamic parameter tuning, and effi-
cient resource management can refine these quantum-
inspired approaches. Ultimately, these methods of-
fer promising avenues for advancing cyber defence
strategies and resilience.
REFERENCES
Andrychowicz, M., Wolski, F., Ray, A., Schneider, J., Fong,
R., Welinder, P., McGrew, B., Tobin, J., Abbeel, O. P.,
and Zaremba, W. (2017a). Hindsight experience re-
play. In Advances in neural information processing
systems, volume 30.
Andrychowicz, M., Wolski, F., Ray, A., Schneider, J., Fong,
R., Welinder, P., McGrew, B., Tobin, J., Abbeel, P.,
and Zaremba, W. (2017b). Hindsight experience re-
play. CoRR, abs/1707.01495.
Baillie, C., Standen, M., Schwartz, J., Docking, M., Bow-
man, D., and Kim, J. (2020). Cyborg: An au-
tonomous cyber operations research gym. arXiv
preprint arXiv:2002.10667.
Benaddi, H., Elhajji, S., Benaddi, A., Amzazi, S., Benaddi,
H., and Oudani, H. (2022). Robust enhancement of
intrusion detection systems using deep reinforcement
learning and stochastic game. IEEE Transactions on
Vehicular Technology, 71(10):11089–11102.
Cercignani, C. and Cercignani, C. (1988). The Boltzmann
Equation. Springer New York.
Hasselt, H. V., Guez, A., and Silver, D. (2016). Deep re-
inforcement learning with double q-learning. In Pro-
ceedings of the AAAI Conference on Artificial Intelli-
gence, volume 30.
Kiely, M., Bowman, D., Standen, M., and Moir, C. (2023).
On autonomous agents in a cyber defence environ-
ment. arXiv preprint arXiv:2309.07388.
Lagoudakis, M. and Parr, R. (2012). Value function approx-
imation in zero-sum markov games. arXiv preprint
arXiv:1301.0580.
Li, T. and Hankin, C. (2017). Effective defence against
zero-day exploits using bayesian networks. In Crit-
ical Information Infrastructures Security: 11th Inter-
national Conference, pages 123–136. Springer.
Liu, X., Zhang, H., Dong, S., and Zhang, Y. (2021). Net-
work defense decision-making based on a stochastic
game system and a deep recurrent q-network. Com-
puters & Security, 111:102480.
Schaul, T., Quan, J., Antonoglou, I., and Silver, D. (2015).
Prioritized experience replay.
Shen, Y., Shepherd, C., Ahmed, C. M., Yu, S., and Li,
T. (2024). Comparative dqn-improved algorithms for
stochastic games-based automated edge intelligence-
enabled iot malware spread-suppression strategies.
IEEE Internet of Things Journal, 11(12):22550–
22561.
Standen, M., Bowman, D., Son Hoang, T. R., Lucas, M.,
Tassel, R. V., Vu, P., Kiely, M., Konschnik, K. C. N.,
and Collyer, J. (2022). Cyber operations research
gym. https://github.com/cage-challenge/CybORG.
Vyas, S., Hannay, J., Bolton, A., and Burnap, P. P. (2023).
Automated cyber defence: A review. arXiv preprint
arXiv:2303.04926.
Wei, Q., Ma, H., Chen, C., and Dong, D. (2021). Deep
reinforcement learning with quantum-inspired expe-
rience replay. IEEE Transactions on Cybernetics,
52(9):9326–9338.
Zhou, L., Wang, S. T., Choi, S., Pichler, H., and Lukin,
M. D. (2020). Quantum approximate optimization
algorithm: Performance, mechanism, and implemen-
tation on near-term devices. Physical Review X,
10(2):021067.
Autonomous Cyber Defence by Quantum-Inspired Deep Reinforcement Learning
191
