
Transferability of Labels Between Multilens Cameras
Ignacio de Loyola P
´
aez-Ubieta
a
, Daniel Frau-Alfaro
b
and Santiago T. Puente
c
AUtomatics, RObotics, and Artificial Vision (AUROVA) Lab, University Institute for Computer Research (IUII), University
of Alicante, Crta. San Vicente s/n, San Vicente del Raspeig, E-03690, Alicante, Spain
Keywords:
Multispectral Imagery, Labeling, Phase Correlation, Label Transfer, Pills.
Abstract:
In this work, a novel approach for the automated transfer of Bounding Box (BB) and mask labels across
different channels on multilens cameras is presented. For that purpose, the proposed method combines the
well-known phase correlation method with a refinement process. In the initial step, images are aligned by
localising the peak of intensity obtained in the spatial domain after performing the cross-correlation process in
the frequency domain. The second step consists of obtaining the optimal transformation through an iterative
process that maximises the IoU (Intersection over Union) metric. The results show that the proposed method
enables the transfer of labels across different lenses on a camera with an accuracy of over 90% in the majority
of cases, with a processing time of just 65 ms. Once the transformations have been obtained, artificial RGB
images are generated for labelling purposes, with the objective of transferring this information into each of the
other lenses. This work will facilitate the use of this type of camera in a wider range of fields, beyond those of
satellite or medical imagery, thereby enabling the labelling of even invisible objects in the visible spectrum.
1 INTRODUCTION
The training of a detection (Wang et al., 2023) or seg-
mentation (Wang et al., 2020) Neural Network (NN)
requires a large amount of data to adapt an already
trained model to a specific task. This is exemplified
by the training of a NN to detect or segment house-
hold waste (P
´
aez-Ubieta et al., 2023) (P
´
aez-Ubieta
et al., 2023).
However, recent developments have witnessed the
advent of automated labeling models for objects in
RGB images. Notably, the Segment Anything Model
(SAM) model (Kirillov et al., 2023) has rapidly as-
cended to become a standard reference in this field.
Multi-Spectral Imaging (MSI) is a technique that
employs sensors capable of generating images at dif-
ferent frequency ranges compared to those produced
by traditional RGB cameras. In a multitude of dis-
ciplines, including agriculture (Hoffer et al., 1966)
(Mia et al., 2023), medicine (Andersson et al., 1987)
(Ma et al., 2023) and remote sensing (Maxwell, 1976)
(Yuan et al., 2021), these cameras have demonstrated
considerable potential over the past few decades.
However, traditional computer vision techniques
a
https://orcid.org/0000-0001-9901-7264
b
https://orcid.org/0009-0000-4098-3783
c
https://orcid.org/0000-0002-6175-600X
for detecting and segmenting objects have relied on
RGB images, excluding other perception sensors such
as Light Detection And Ranging (LiDAR) or multi-
lens cameras. Nevertheless, an increasing number of
articles utilising sensors other than RGB cameras for
labeling purposes are being published (O
ˇ
sep et al.,
2024) (Gallagher et al., 2024).
For instance, (G
´
omez and Meoni, 2021) intro-
duced a semi-supervised learning approach for the au-
tomatic classification of multispectral scenes derived
from land datasets, including EuroSAT (Helber et al.,
2019) and the aerial UC Merced land use (UCM)
(Yang and Newsam, 2010). For that purpose, they
label between 5 and 300 images per class, which are
then fed into a Graphics Processing Unit (GPU) for
training in order to obtain a model that is capable of
generalization. In our case, a training phase is not
required, as the transformation between the camera
lenses is directly obtained. In this way, more detailed
object recognition is possible, rather than just scene
classification. Furthermore, 15 images were used dur-
ing the transformation phase; nonetheless, the pro-
posed method is also able to make use of a smaller
number of images.
Another example is provided by (Ulku et al.,
2022), in which the authors seek to segment trees
semantically using satellite and aerial images from
410
Páez-Ubieta, I. L., Frau-Alfaro, D. and Puente, S. T.
Transferability of Labels Between Multilens Cameras.
DOI: 10.5220/0013154100003912
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
410-417
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

the DSTL Satellite Imagery Feature Detection Im-
age (Benjamin et al., 2016) and RIT-18 (The Hamlin
State Beach Park) Aerial Image (Kemker et al., 2018)
datasets. To this end, the authors use several segmen-
tation NNs to perform the task of labeling trees on the
images. In constrast, our approach does not require
any kind of semantic segmentation NNs to label our
images. Additionally, the trees in the images used by
the authors cover a significant portion of the image,
which facilitates the NN’s task of identifying and la-
beling them. In comparison, the objects in our case
are much smaller, making it more challenging.
Other works, such as (Park et al., 2021), use mul-
tispectral and RGB cameras to detect sick pine trees
through the analysis of aerial photographs. In order to
align the images for subsequent labeling, the Scale-
Invariant Feature Transform (SIFT) method (Lowe,
1999) is employed. However, this aforementioned
method is only viable when keypoints and descriptors
can be extracted from the images. It is therefore not
applicable to uniform objects, which can be addressed
by our method. Furthermore, the NN analyses both
RGB and 6 channel multispectral images, which is an
inefficient process given that some of the 9 channels
may contain no information at all.
The following work aims to obtain the transfor-
mation between images captured from a multispectral
multilens camera. The final objective is to facilitate
the transfer of Bounding Box (BB) or mask labels
from one image to the others. Additionally, the sys-
tem enables users to label objects with minimal effort
in RGB images, thereby reducing the time required
for this task. The generation of these RGB images
requires the combination of the appropriate frequen-
cies from the multispectral camera in the correct se-
quence. In order to obtain the transformation, it is
requisite to calculate the displacement using the fre-
quency domain and refine it progressively in order to
obtain the optimal result using just Central Processing
Unit (CPU) resources. The exclusion of GPUs will
enable the utilisation of more economical computing
devices, while simultaneously reducing energy con-
sumption.
The main contributions of this work are:
• A new method for obtaining the transformation
between the lens of a multispectral camera, which
has been demonstrated to be highly accurate.
• The possibility of generating fake RGB images
from combining its components by applying the
aforementioned transform.
• Transforming labels in both BB and mask formats
across images is conducted in order to label ob-
jects that disappear in certain frequencies.
This work is organised as follows: Section 2 in-
troduces the proposed method, which is divided into
two steps, Section 3 presents the setup that is used for
experiments, as well as the transformations between
the lens and the fake RGB labeling process and Sec-
tion 4 summarises the article and further work using
this method as a core project.
2 METHODOLOGY
This Section details the method for obtaining the
transformation between different lenses on the cam-
era. It is composed of two steps: firstly, the displace-
ment is calculated using the phase correlation method;
secondly, the result is refined using a sliding window
across several scales.
2.1 Displacement Calculation
The lenses of a multilens multispectral camera are
not aligned, resulting in images that are not aligned.
Given that the lenses are at the same height, it can be
reasonably assumed that a two-dimensional transfor-
mation (rotation, translation, scale and/or skew) is the
most probable conversion to relate them. The afore-
mentioned assumption, positing a mere displacement
between the captured images by the disparate lenses,
was made. However, should the results prove oth-
erwise, an alternative transformation would be uti-
lized. This could include the log-polar transform for
addressing rotations and scale estimation, or an affine
parameter estimation in instances where skew trans-
formations are to be dealt with.
The images obtained are in the space domain,
wherein each pixel represents the intensity. However,
we move to the frequency domain, in which images
are reorganised according to frequency, with the dis-
tribution of frequencies determined by their periodic-
ity. High periodicity is represented in the centre of the
image, while low periodicity is represented far from
it.
By taking advantage of the distribution of images
in the frequency domain, the displacement between
two images can be expressed as a linear phase change.
This is the fundamental concept underlying the phase
correlation algorithm.
The algorithm receives two images, i
1
and i
2
, as
input. The first step is to remove sharp discontinuities
at the image borders, as their presence results in the
generation of a high-frequency component, thereby
reducing the accuracy of the method. This issue is
known as spectral leakage. However, the use of a
Hanning window (Eq. 1) effectively addresses this
Transferability of Labels Between Multilens Cameras
411

problem, resulting in a smoother image with the re-
moval of undesirable artifacts and edges.
w(x, y) =
0.5
1 − cos
2πx
M − 1
·
0.5
1 − cos
2πy
N − 1
(1)
where M and N represent the dimensions of the
image, while x and y represent the pixel coordinates.
Upon application to the previously referenced images,
the resulting values are i
1h
(x, y) and i
2h
(x, y), respec-
tively. The second step involves transforming the pre-
viously obtained spectral leakage-free images into the
frequency domain. This is achieved through by use of
the Discrete Fourier Transform (DFT), as illustrated
by Eq. 2, which yields I
1h
(u, v) and I
2h
(u, v), respec-
tively.
I
1h
(u, v) =
M−1
∑
x=0
N−1
∑
y=0
i
1h
(x, y) · e
−2πi
(
ux
M
+
vy
N
)
(2)
Once the images have been transformed into the
frequency domain, the phase shift between them rep-
resents the translational shift in the space domain that
corresponds to the searched parameter. In order to
achieve this, the third step is to isolate the phase in-
formation by utilising the cross-power spectrum (Eq.
3), normalising the magnitude and retaining the phase
information.
CP (u, v) =
I
1h
(u, v) ·I
∗
2h
(u, v)
I
1h
(u, v) ·I
∗
2h
(u, v)
(3)
where I
∗
2h
(u, v) represents the complex conjugate
of I
2h
(u, v). The forth step involves returning to
the spatial domain by applying the Inverse Discrete
Fourier Transform (IDFT) to the calculated cross-
power spectrum, CP (u, v), to obtain the correlation
matrix, c(x, y) (Eq. 4).
c(x, y) =
M−1
∑
u=0
N−1
∑
v=0
CP (u, v) · e
2πi
(
ux
M
+
vy
N
)
(4)
At last, the peak location (∆x, ∆y) in the correla-
tion matrix c(x, y) is identified (Eq. 5) by carrying out
a 5 × 5 weighted centroid operation around the peak,
in order to achieve subpixel accuracy. The result is
then normalised between 0 and 1.
(∆x, ∆y) = weightedCentroid{argmax
(x,y)
{c(x, y)}}
(5)
2.2 Refinement
Once the relative displacement (∆x, ∆y) between the
two input images, i
1
and i
2
, has been obtained using
the phase correlation method, a refinement process is
required in order to refine the transformation.
In order to achieve this, a series of alternative, po-
tentially improved displacement values are identified.
Firstly, the coordinates (∆x, ∆y) are rounded and then
added or subtracted a value RV : i ∈ 1 . . . n, with n rep-
resenting the number of refinement steps along both
both the x and y axes at different scales s. The afore-
mentioned variable s will represent different orders of
magnitude, with the discrete values on [1, 0.1, 0.01]
varying in order to check pixel and subpixel precision
(Eq. 6). This will result in several possible combina-
tions.
∆x
p
= [∆x − RV · s, ··· , ∆x, ···∆x + RV · s]
∆y
p
= [∆y − RV · s, ··· , ∆y, · · · ∆y + RV · s]
(6)
The potential values (∆x
p
, ∆y
p
) are incorporated
into a homogeneous transformation (Eq. 7) and ap-
plied to the different labels on the image to determine
whether a better solution is obtained. To this end,
some labelled images are used as a basis for compar-
ison with these newly obtained labels.
l
N:nx
l
N:ny
=
1 0 ∆x
p
0 1 ∆y
p
l
nx
l
ny
(7)
The labels l = [(l
1x
, l
1y
), ..., (l
nx
, l
ny
), ..., (l
Nx
, l
Ny
)]
comprise a set of N points that collectively define the
boundaries of a labeled objects. In the context of a
mask, the value of N may be any positive integer. Al-
ternatively, a BB is defined by N = 2, representing the
top left and bottom right coordinates of the box.
The final transform will convert the
original mask or BB coordinates (l
nx
, l
ny
)
into the new reference frame, obtaining
l
M
= [(l
M:1x
, l
M:1y
), ..., (l
M:nx
, l
M:ny
), ..., (l
M:Nx
, l
M:Ny
)].
The aforementioned labelled image l
GT
=
[(l
GT :1x
, l
GT :1y
), ..., (l
GT :nx
, l
GT :ny
), ..., (l
GT :Nx
, l
GT :Ny
)]
will be compared against the resulting images in
order to achieve the highest Intersection Over Union
(IOU).
The IOU, also known as the Jaccard index, is a
metric that quantifies the degree of overlap between
two labels, with a value between 0 and 1. It is repre-
sented by Eq. 8.
IoU =
l
M
∩ l
GT
l
M
∪ l
GT
(8)
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
412

3 EXPERIMENTATION
In this Section, a description the hardware and soft-
ware setup is provided, as well as an overview of
the experiments that demonstrate the success of the
proposed method for obtaining labels across multiple
multispectral images.
3.1 Setup
In terms of the hardware used (see Fig. 1), a MicaS-
ense RedEdge-MX Dual multispectral camera was
utilised for the acquisition of the images. The camera
is comprised of ten individual cameras, divided into
two distinct modules, one dedicated to the red spec-
trum and the other to the blue. This configuration is
illustrated in Fig. 1a. A summary of the frequencies
associated with each band is provided in Table 1. All
10 bands generate 12-bit images with a resolution of
1280x960. The camera is mounted on the wrist of an
Ur5e 6 Degrees of Freedom (DoF) robotic arm, which
enables the camera to be positioned with absolute pre-
cision in any given location within the space. In terms
of positioning, the camera is situated in parallel with
a table at a distance of 500 mm (see Fig. 1b). With
regard to the objects employed in the experimental
procedure, 16 small pills, measuring between 8 and
22 mm are utilised. These provide a diverse range of
shapes and colours, necessary for the completion of
the planned experiments.
Table 1: Band numbers, frequencies and color names for
each channel on the MicaSense RedEdge-MX Dual camera.
Module Band f ± A (nm) Color name
Red 1 475 ± 16 Blue
2 560 ± 13.5 Green
3 668 ± 7 Red
4 717 ± 6 Red Edge
5 842 ± 28.5 Near IR
Blue 6 444 ± 14 Coastal Blue
7 531 ± 7 Green
8 650 ± 8 Red
9 705 ± 5 Red Edge I
10 740 ± 9 Red Edge II
In terms of software, images were labeled us-
ing the LabelMe tool (Torralba et al., 2010). Two
different labeling approximations were employed in
all experiments: BB and mask. The computer used
to obtain the results operates on the Ubuntu 20.04.4
operating system with Python 3.8.10 and OpenCV
4.7.0 software, running on an 11th Generation Intel
©
Core™ i9-11900H processor with 8 physical and 16
logical cores, respectively. It operates at a frequency
(a) Multispectral camera lenses.
(b) Robotic arm with the MicaSense RedEdge-MX Dual.
Figure 1: Hardware used during the experiments.
of 2.50 GHz, which is sufficient to perform all neces-
sary operations in a short period of time.
3.2 Transformations
Although the camera is equipped with ten lenses, only
those situated in the red half of the apparatus will be
utilised.
In practice, 15 images were captured with each
camera, of which 12 were used to obtain the transform
and 3 to verify the accuracy of the obtained transform.
The training images from band 5 (lenses in the mid-
dle) and the test images from all five lenses were la-
belled. Additionally, the refinement step n was set to
5, indicating that 121 potential matrices exist at three
distinct levels of pixel precision.
Following the application of the phase correlation
Transferability of Labels Between Multilens Cameras
413
method and refinement for both BB and mask labels,
the results in Tables 2 and 3 were obtained.
Table 2: Transformations in pixel level, IOU and time for
BB labels to be transferred from band 5 into the other
lenses.
Band Transform (px) IoU (%) Time (ms)
1
1
5
T
BB
=
−52.0
47.0
98.58 66.31
2
2
5
T
BB
=
53.9
46.1
100 53.52
3
3
5
T
BB
=
52.9
−23.4
95.95 55.66
4
4
5
T
BB
=
−52.1
−18.9
93.53 56.55
Table 3: Transformations in pixel level, IOU and time for
mask labels to be transferred from band 5 into the other
lenses.
Band Transform (px) IoU (%) Time (ms)
1
1
5
T
MK
=
−52.05
47.2
97.49 82.81
2
2
5
T
MK
=
54.78
46.52
94.36 72.58
3
3
5
T
MK
=
53.5
−23.8
93.77 73.05
4
4
5
T
MK
=
−53.24
−19.01
89.91 58.83
In order to depict the progressive refinement pro-
cess and its incremental enhancement of the IOU,
band 1 from mask labeling is presented in Table 4.
Step 0 comprises the application of phase correlation,
step 1 involves the refinement of the image at the pixel
level with s equal to 1, step 2 entails the refinement of
the image at the subpixel level with s equal to 0.1,
and step 3 comprises the refinement of the image at
two levels of subpixel with s equal to 0.01.
Table 4: Phase correlation and refinement steps applied to
band 1 of mask labeled images.
Step Transform (px) IoU (%) Time (ms)
0
1
5
T
MK−0
=
−51.85
47.02
96.73 76.75
1
1
5
T
MK−1
=
−52.0
47.0
96.99 1.96
2
1
5
T
MK−2
=
−52.0
47.2
97.40 2.05
3
1
5
T
MK
=
−52.05
47.2
97.49 2.05
The application of
1
5
T
BB
,
2
5
T
BB
,
3
5
T
BB
and
4
5
T
BB
, as
detailed in Table 2, has resulted in the generation of
several labeled images of BB. These can be observed
in Fig. 2. As an illustrative example, Fig. 2a is pro-
vided, which represents band 5. Once the labels of
this image have been transformed, the images in Figs.
2b, 2c, 2d and 2e are generated. As can be observed,
the transformed labels are integrated almost perfectly
into the objects of the other bands, eliminating the
necessity for manual annotation. For a rapid assess-
ment of quality, ground truth human-labeled images
are provided in Figs. 2f, 2g, 2h and 2i. The least
optimal result is observed in band 4, where the pill’s
outline begins to merge with the background, making
it challenging for both the proposed method and the
user to distinguish it.
Proceeding to a more challenging case, the effi-
cacy of mask-labeled images is assessed. The images
are transformed using matrices
1
5
T
MK
,
2
5
T
MK
,
3
5
T
MK
and
4
5
T
MK
, as detailed in Table 3.The results of the afore-
mentioned process are illustrated in Fig. 3. The layout
is consistent with that observed in Fig. 2. In consid-
eration of the aforementioned factors, the most un-
favourable outcome is once again band 4. The under-
lying cause is identical to that observed in the preced-
ing instance. The pill begins to exhibit a noticeable
decline in visibility, particularly in comparison to the
other three bands. Nevertheless, the labelling process
remains successful.
3.3 RGB Label Transferability
Once it has been demonstrated that the labelling pro-
cess is successful, a further experiment will be con-
ducted. This will involve labelling RGB images cre-
ated from the multispectral images and then trans-
forming these labels to the other bands.
To this end, the bands representative of the red,
green, and blue frequencies must be combined. As in-
dicated in Table 1, bands 1-3 from the red module are
the pertinent ones. Consequently, the images are con-
verted from bands 1-3 to band 5 by means of Eq. 9,
resulting in an artificial RGB image im
RGB
= [R, G, B].
R =
3
5
T
−1
BB|mask
· im
band3
G =
2
5
T
−1
BB|mask
· im
band2
B =
1
5
T
−1
BB|mask
· im
band1
(9)
Subsequently, the user labels the aforemen-
tioned RGB image in BB or mask format as l
RGB
=
[(l
RGB:1x
, l
RGB:1y
), ..., (l
RGB:nx
, l
RGB:ny
), ..., (l
RGB:Nx
,
l
RGB:Ny
)]. Once the label is complete, it is transferred
back into the other bands in the camera, thus obtain-
ing labels in all frequencies (Eq. 10).
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
414
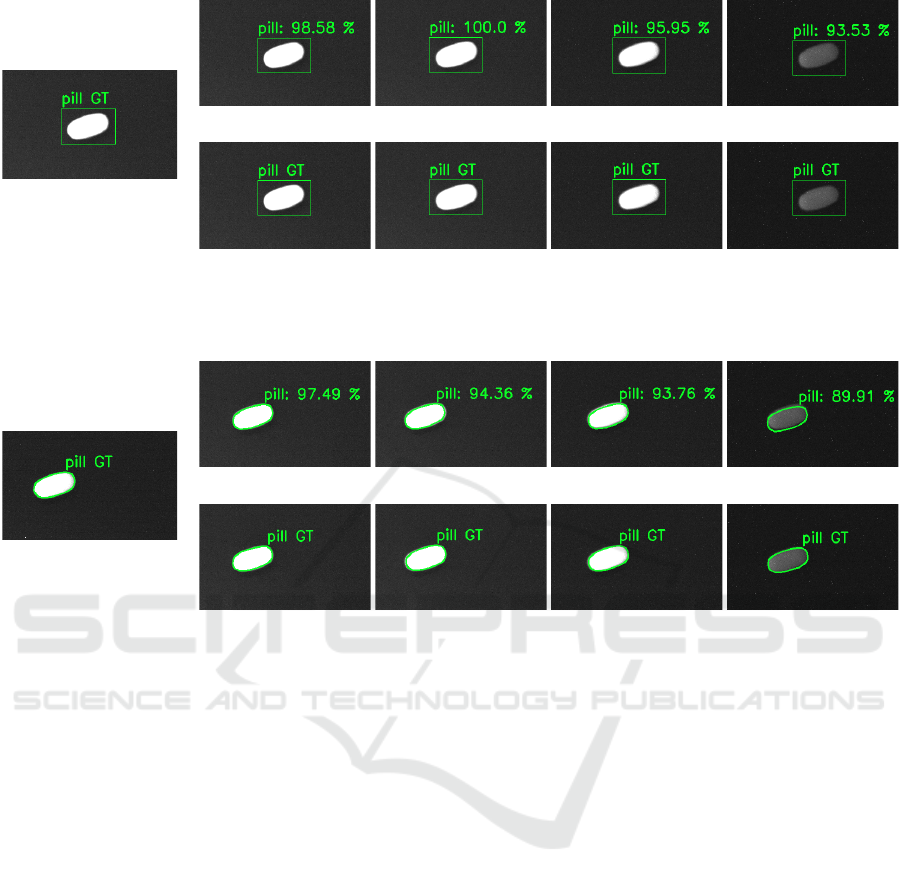
(a) Band 5 input.
(b) Band 1 output. (c) Band 2 output. (d) Band 3 output. (e) Band 4 output.
(f) Band 1 reference. (g) Band 2 reference. (h) Band 3 reference. (i) Band 4 reference.
Figure 2: BB labeled experiment: (a) Reference image (band 5) to start with, (b, c, d, e) Transformed labels (bands 1-4) and
(f, g, h, i) Ground truth labels for comparison purposes (bands 1-4).
(a) Band 5 input.
(b) Band 1 output. (c) Band 2 output. (d) Band 3 output. (e) Band 4 output.
(f) Band 1 reference. (g) Band 2 reference. (h) Band 3 reference. (i) Band 4 reference.
Figure 3: Mask labeled experiment: (a) Reference image (band 5) to start with, (b, c, d, e) Transformed labels (bands 1-4)
and (f, g, h, i) Ground truth labels for comparison purposes (bands 1-4).
l
band1
=
1
5
T
BB|mask
· l
RGB
l
band2
=
2
5
T
BB|mask
· l
RGB
l
band3
=
3
5
T
BB|mask
· l
RGB
l
band4
=
4
5
T
BB|mask
· l
RGB
l
band5
= I
2x3
· l
RGB
(10)
The initial process for generating the im
RGB
=
[R, G, B] is illustrated in Fig. 4. A combination of
blue (Fig. 4a), green (Fig. 4b) and red (Fig. 4c) im-
ages is performed, generating the artificial fake RGB
image (Fig. 4d).
Once the artificial RGB image has been generated,
the objects have been labeled in both the BB format
(Fig. 5a) and the mask format (Fig. 6a). Subse-
quently, the images with BB (Figs. 5b-5f) and masks
(Figs. 6b-6f) were generated by applying the transfor-
mations obtained from Section 3.2. As it can be ob-
served, the results obtained demonstrate the efficacy
of the proposed approach. For instance, the objects in
band 4 with BB (Fig. 5e) and mask (Fig. 6e) labeling
are no longer visible to some extent. However, due
to the method designed, the objects in those positions
are labeled even though they are not visible.
4 CONCLUSION
This work presents a method for automatically la-
belling multispectral images, beginning with a single-
band image BB or mask labeled image.
In order to achieve this, a two-step process is em-
ployed, comprising phase correlation and refinement.
In the initial step, the transformation between the two
images is obtained by applying a Hanning window
to the image, transforming the spatial domain im-
ages into the frequency domain with the Fourier dis-
crete transform, applying the cross-power spectrum
formula to retain just the phase information of the im-
ages, converting the cross-power spectrum back to the
spatial domain, and finally locating the peak, which
represents the translation between the two analysed
images. The second process entails refining the trans-
formation obtained in the preceding step by searching
Transferability of Labels Between Multilens Cameras
415
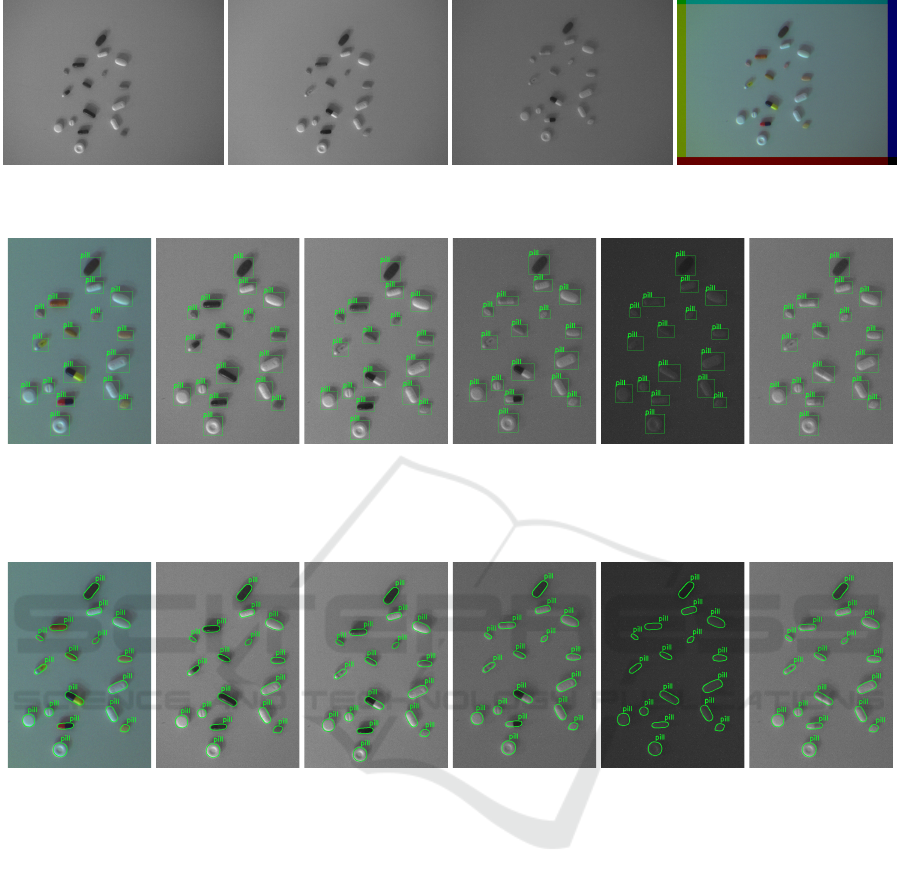
(a) Band 1: blue. (b) Band 2: green. (c) Band 3: red. (d) Fake RGB image.
Figure 4: Combination to create fake RGB images: (a,b,c) Bands 1, 2, 3, respectively and (d) Generated fake RGB image.
(a) Fake RGB
labeled with BBs.
(b) Band 1 with
transfered labels.
(c) Band 2 with
transfered labels.
(d) Band 3 with
transfered labels.
(e) Band 4 with
transfered labels.
(f) Band 5 with
transfered labels.
Figure 5: BB labeled fake RGB image and transferred labels: (a) Fake RGB image with BB labels and (b,c,d,e,f) Labels
transferred to bands 1-5, respectively.
(a) Fake RGB
labeled with masks.
(b) Band 1 with
transfered labels.
(c) Band 2 with
transfered labels.
(d) Band 3 with
transfered labels.
(e) Band 4 with
transfered labels.
(f) Band 5 with
transfered labels.
Figure 6: Mask labeled fake RGB image and transferred labels: (a) Fake RGB image with mask labels and (b,c,d,e,f) Labels
transferred to bands 1-5, respectively.
in a proximity window for an optimal one through an
iterative process at the pixel and two subpixel levels,
with the best transformation being saved as the one
that yielded the highest percentage in the IOU index.
In order to test the method, the transformation
between five multispectral lenses from a MicaSense
RedEdge-MX Dual camera was obtained. By simply
labeling 12 images from band 5 with a high contrast,
it was possible to obtain the transformation of the la-
bel types with an accuracy of 97% and 94% for the
BB and mask label types, respectively, in just 58 ms
and 72 ms. Subsequently, the inverse of the afore-
mentioned transformations was employed to generate
an artificial RGB image, thereby facilitating the la-
belling process in coloured images. Subsequently, the
labels are transformed back into each lens, thus en-
suring that the labels are present in all five channels
of the multispectral camera.
Future work will include testing the proposed
method on additional multispectral cameras with dif-
fering morphologies, as well as testing it with all ten
lenses that the camera used in the present paper has.
Furthermore, the integration of an RGB camera would
facilitate the avoidance of the generation of artificial
RGB images derived from the multispectral lenses,
thereby reducing the potential for the accumulation
of minor errors during the process. An alternative
approach would be to create a dataset of domestic
waste with the aim of training different NNs and test-
ing whether the additional information provided by 10
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
416

lenses and 12-bit images could facilitate more accu-
rate categorisation compared to the same NNs using
8-bit RGB images of objects that resemble the same
but are made of different materials.
ACKNOWLEDGEMENTS
Research work was funded by grant
PID2021-122685OB-I00 funded by MI-
CIU/AEI/10.13039/501100011033 and ERDF/EU.
REFERENCES
Andersson, P., Montan, S., and Svanberg, S. (1987). Mul-
tispectral system for medical fluorescence imaging.
IEEE Journal of Quantum Electronics, 23(10):1798–
1805.
Benjamin, MatvL, midaha, PGibson, RMcKinlay, and Kan,
W. (2016). Dstl satellite imagery feature detection.
Gallagher, J. E., Gogia, A., and Oughton, E. J. (2024). A
multispectral automated transfer technique (matt) for
machine-driven image labeling utilizing the segment
anything model (sam). arXiv preprint.
G
´
omez, P. and Meoni, G. (2021). Msmatch: Semisuper-
vised multispectral scene classification with few la-
bels. IEEE Journal of Selected Topics in Applied
Earth Observations and Remote Sensing, 14:11643–
11654.
Helber, P., Bischke, B., Dengel, A., and Borth, D. (2019).
Eurosat: A novel dataset and deep learning bench-
mark for land use and land cover classification. IEEE
Journal of Selected Topics in Applied Earth Observa-
tions and Remote Sensing, 12(7):2217–2226.
Hoffer, R., Johannsen, C., and Baumgardner, M. (1966).
Agricultural applications of remote multispectral
sensing. In Proceedings of the Indiana Academy of
Science, volume 76, pages 386–396.
Kemker, R., Salvaggio, C., and Kanan, C. (2018). Al-
gorithms for semantic segmentation of multispectral
remote sensing imagery using deep learning. ISPRS
Journal of Photogrammetry and Remote Sensing.
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W.-Y., et al. (2023). Segment anything. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 4015–4026.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Proceedings of the seventh
IEEE international conference on computer vision,
volume 2, pages 1150–1157. IEEE.
Ma, F., Yuan, M., and Kozak, I. (2023). Multispectral imag-
ing: Review of current applications. Survey of Oph-
thalmology, 68(5):889–904.
Maxwell, E. L. (1976). Multivariate system analysis of mul-
tispectral imagery. Photogrammetric Engineering and
Remote Sensing, 42(9):1173–1186.
Mia, M. S., Tanabe, R., Habibi, L. N., Hashimoto, N.,
Homma, K., Maki, M., Matsui, T., and Tanaka, T.
S. T. (2023). Multimodal deep learning for rice yield
prediction using uav-based multispectral imagery and
weather data. Remote Sensing, 15(10).
O
ˇ
sep, A., Meinhardt, T., Ferroni, F., Peri, N., Ramanan, D.,
and Leal-Taix
´
e, L. (2024). Better call sal: Towards
learning to segment anything in lidar. arXiv preprint.
P
´
aez-Ubieta, I. d. L., Casta
˜
no-Amor
´
os, J., Puente, S. T., and
Gil, P. (2023). Vision and tactile robotic system to
grasp litter in outdoor environments. Journal of Intel-
ligent & Robotic Systems, 109(2):36.
Park, H. G., Yun, J. P., Kim, M. Y., and Jeong, S. H. (2021).
Multichannel object detection for detecting suspected
trees with pine wilt disease using multispectral drone
imagery. IEEE Journal of Selected Topics in Applied
Earth Observations and Remote Sensing, 14:8350–
8358.
P
´
aez-Ubieta, I. d. L., Velasco-S
´
anchez, E., Puente, S. T.,
and Candelas, F. (2023). Detection and depth esti-
mation for domestic waste in outdoor environments
by sensors fusion. IFAC-PapersOnLine, 56(2):9276–
9281. 22nd IFAC World Congress.
Torralba, A., Russell, B. C., and Yuen, J. (2010). Labelme:
Online image annotation and applications. Proceed-
ings of the IEEE, 98(8):1467–1484.
Ulku, I., Akag
¨
und
¨
uz, E., and Ghamisi, P. (2022). Deep se-
mantic segmentation of trees using multispectral im-
ages. IEEE Journal of Selected Topics in Applied
Earth Observations and Remote Sensing, 15:7589–
7604.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2023).
Yolov7: Trainable bag-of-freebies sets new state-
of-the-art for real-time object detectors. In 2023
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 7464–7475. IEEE.
Wang, X., Zhang, R., Kong, T., Li, L., and Shen, C.
(2020). Solov2: Dynamic and fast instance segmenta-
tion. Advances in Neural information processing sys-
tems, 33:17721–17732.
Yang, Y. and Newsam, S. (2010). Bag-of-visual-words and
spatial extensions for land-use classification. In Pro-
ceedings of the 18th SIGSPATIAL international con-
ference on advances in geographic information sys-
tems, pages 270–279.
Yuan, K., Zhuang, X., Schaefer, G., Feng, J., Guan, L., and
Fang, H. (2021). Deep-learning-based multispectral
satellite image segmentation for water body detection.
IEEE Journal of Selected Topics in Applied Earth Ob-
servations and Remote Sensing, 14:7422–7434.
Transferability of Labels Between Multilens Cameras
417
