
A Framework for Developing Robust Machine Learning Models in
Harsh Environments: A Review of CNN Design Choices
William Dennis
a
and James Pope
b
Communication Systems and Networks Group, University of Bristol, Bristol, U.K.
Keywords:
Robust Machine Learning, Fault Tolerance, Harsh Environments, Convolutional Neural Network, Single
Event Effects, Activation Functions, Dropout, Regularisation, Pooling.
Abstract:
Machine Learning algorithms are envisioned to be used in harsh and/or safety critical environments such as
self-driving cars, aerospace, and nuclear sites where the effects of radiation can cause errors in electronics
known as Single Event Effects (SEEs). The effect of SEEs on machine learning models, such as neural net-
works composed of millions of parameters, is currently unknown. Understanding the models in terms of
robustness and reliability is essential for their use in these environments. To facilitate this understanding, we
propose a novel framework to simulate SEEs during model training and inference. Using the framework we
investigate the robustness of the Convolutional Neural Network (CNN) architecture with dropout, regularisa-
tion and activation functions under different error models. Two new activation functions are suggested that
decrease error by up to 40% compared to ReLU. We also investigate an alternative pooling layer that can
provide model robustness with a 16% decrease in error with ReLU. Overall, our results confirm the efficacy
of the framework for evaluating model robustness in harsh environments.
1 INTRODUCTION
The advent of Neural Network architectures
has shifted the paradigm from traditional, well-
understood image processing methods towards more
complex, less-understood models. This black-box
nature of state-of-the-art models can pose unforeseen
dangers when applied to industry and exposed to
Single Event Effects (SEEs). Therefore The focus
of this research is to directly attack the black-box of
these complex models via simulated SEEs.
SEEs are radiation induced errors on electronic
devices that could result in changes to the software
running. For use in safety-critical environments, such
as driverless systems, understanding how a Machine
Learning (ML) model behaves under SEEs is impera-
tive. Many example situations and further motivation
are outlined in Chapter 2. Robustness in ML systems
are therefore a key requirement that has typically been
referred to as the performance of a model under at-
tacks to the input data. On the other hand, attacks
to the parameter space in ML models are far less ex-
plored and do not fit under the adversarial robustness
umbrella.
a
https://orcid.org/0009-0005-4769-3136
b
https://orcid.org/0000-0003-2656-363X
Convolutional Neural Networks (CNNs) are a
common ML model aimed to solve image process-
ing tasks. First introduced in 2012, CNNs have
consistently been the highest performing architecture
across image classification competitions, such as the
ImageNet Large Scale Visual Recognition Challenge
(Krizhevsky et al., 2012). This 2012 CNN model
was called AlexNet and is an example of a Deep
Neural Network (DNN) consisting of over 60 mil-
lion parameters across 5 convolutional layers and 3
fully connected layers. The power of these models
derives from their ability to learn hierarchical repre-
sentations of data with every layer abstracting features
from the raw inputs. Therefore it is unsurprising the
improvements over AlexNet have come with an in-
creased number of layers. DNNs, with their many
layers and huge parameter space, further exemplify
the black box narrative.
There is limited research on perturbations to the
weights and biases of the CNN architecture, which
can be a result of SEEs. Research on SEEs is an
extremely challenging area as the natural phenomena
occurs at a very low probability, making experimen-
tation very hard. Facilities, such as ChipIr can arti-
ficially generate SEE-like particles to perform beam
experiments. This experimentation can produce more
322
Dennis, W. and Pope, J.
A Framework for Developing Robust Machine Learning Models in Harsh Environments: A Review of CNN Design Choices.
DOI: 10.5220/0013155000003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 322-333
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

than 30 million years of natural irradiation in 241
hours (Rech Junior et al., 2022). Although this speeds
up the natural process exponentially, experimentation
is limited by the availability of these devices. Alter-
native approaches have looked towards fault injection
software to simulate SEEs (Hari et al., 2017) but there
is no standardised solution. These beam-experiments
also focus on the sensitivity of hardware, and there-
fore suggest hardware solutions, with minimal regard
to high-level radiation hardening techniques.
This research aims to start addressing this gap by
exploring how CNN design choices influence the ro-
bustness to SEEs. A number of CNN models are built
in the Pytorch deep learning framework and trained
on an example scenario/dataset. Informed by existing
research, an error model simulating SEEs was built
to test these CNNs. Finally a comprehensive analy-
sis of the results from these tests was performed. The
contributions of the paper are as follows:
• Novel framework for evaluating neural networks
in harsh environments
1
.
• Propose two novel activation functions that are
shown to be more robust to SEE related errors.
• Propose novel pooling layer that is also shown to
be more robust to SEE related errors.
2 TECHNICAL BACKGROUND
2.1 History of SEEs and Motivation
SEEs have been known to disrupt spacecraft from the
1970s, and as early as 1962 the idea of SEEs were
first suggested (Wallmark and Marcus, 1962). Binder,
Smith and Holman produced foundational work with
their 1975 paper “Satellite Anomalies from Galactic
Cosmic Rays” (Binder et al., 1975). Here, the authors
were the first to report SEEs in operating satellites
and explored the mechanisms by which cosmic rays
impact microelectronics that have resulted in satellite
communication anomalies. Spacecraft are one exam-
ple of the many harsh environments impacted by the
effects of SEEs and it is clear that the mitigation tech-
niques are essential to enabling the use of electronics
in these environments.
Another area of concern are safety-critical envi-
ronments as SEEs have been shown to occur in every-
day environments. A harmless example popularised
by the media was a Mario speedrunning tournament
where player was aided by a bit change (bitflip) in
1
Source code is available at https://github.com/wd7512/
MSc-Thesis-2024/
the memory of the computer running the game. A
more disastrous case was in 2008, during the flight of
an Airbus A330 between Singapore and Perth. SEEs
sadly resulted in 12 serious injuries when the A330
started nose-diving on two separate occasions (Bu-
reau, 2008)
The miniaturisation of electronics is another fac-
tor driving the need for SEE mitigation techniques.
Transistors, explained in more detail later, are the ba-
sic building block of electronics and have increas-
ing sensitivity to SEEs as miniaturisation progresses.
Moore’s law states that the number of transistors on
an integrated circuit doubles approximately every two
years (Moore, 1998). This has generally held true
since the idea in 1965 with the modern day 3nm
process transistors being less than 50nm in length
(Badaroglu, 2021). The sensitivity arises from the
critical charge required to change the state of the tran-
sistor being proportional to the size. Therefore as
electronic devices become more powerful with more
transistors, smaller transistors and higher transistor
density, ionizing radiation requires less energy to in-
duce an SEE. Consequently, the number of SEEs are
set to increase.
2.2 SEEs and Transistors
Edward Peterson defines SEEs as the action of a sin-
gle ionizing particle as it penetrates sensitive nodes
within electronic devices. SEEs in space arise from
two natural sources, heavy ions from cosmic rays or
solar flares and protons trapped in the earths magnetic
field. An ion is an atom or molecule with a net pos-
itive or negative charge. This is a result of an imbal-
ance between the number of electrons, that hold nega-
tive charge, and number of protons, that hold positive
charge. Many devices can be upset by these ions at a
rate of about 10
−6
upsets per bit each day (Peterson,
2011).
Named after Van Allen’s discovery in 1958,
the Van Allen radiation belts are zones of ener-
getic charged particles originating from solar winds
and held in place by the earths magnetic field
(VAN ALLEN et al., 1958). There is an inner and
outer region which can be dangerous for satellites to
operate in. Peterson states that individual protons can
be found here but have an energy level too low to up-
set most devices via direct ionisation. However, one
proton in 10
5
will undergo a nuclear reaction within
the body of a transistor capable of an upset. There-
fore, at the heart of the belt, 1KB of memory would
have 10 upsets a day, a dangerously high number (Pe-
terson, 2011).
The transistor is the most fundamental building
A Framework for Developing Robust Machine Learning Models in Harsh Environments: A Review of CNN Design Choices
323
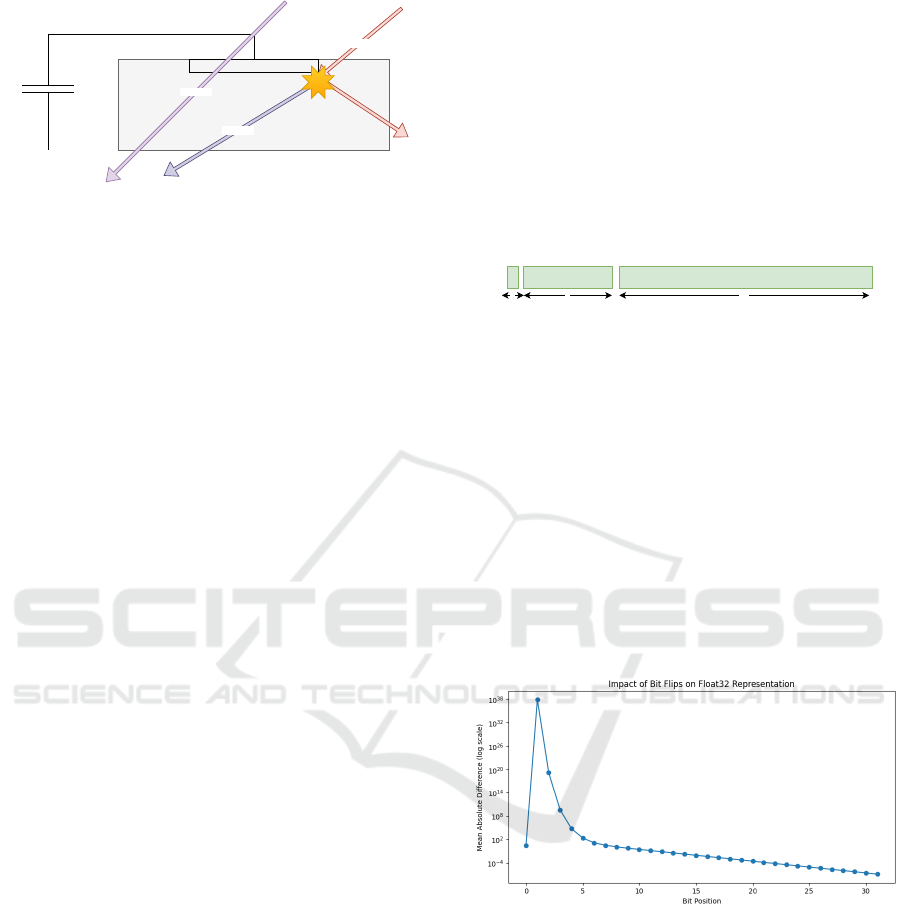
Heavy Ion
High Energy Proton
Heavy Ion
Reaction
Track of Ions
Track of Ions
Figure 1: Ionisation paths though a transistor that can dis-
rupt the state.
block of all modern day electronics. It is a type of
semiconductor used to switch or amplify electric sig-
nals and power. Combining transistors together allow
for the storage of information and the execution of
complex logic operations, forming the basis of mem-
ory cells, processors, and virtually all digital elec-
tronic devices.
Peterson states that a heavy ion can deposit a track
of ions as it passes through the body of the transistor
shown in Figure 1. This produces an electric pulse or
signal that may appear valid to the device, changing
the state of the transistor. Protons passing through the
body of the transistor have no immediate effect but
can cause a nuclear reaction in the silicon. This can
produce heavy ions that achieve the same effect.
Peterson divides SEEs into eight subcategories,
but the focus are on Single Event Upsets (SEUs) and
Multi-Bit Upsets (MBU). Both involve changes to
computer memory via the change of a bit from 0 to
1 or 1 to 0. This is a type of Silent Data Corruption
(SDC) and the focus of this research.
2.3 Numerical Representation in
Computers
A collection of bits can be used to represent floating
point numbers which are essential in computers and
to ML. The IEEE 754 standard provides a framework
for the representation of floating point numbers to
varying degrees of precision (IEEE754, 2019). This
has been adopted as the industry standard and is con-
sistent across all hardware. In ML, Floating Point
(FP) 16, 32 and 64 are commonly used, where the
number represents the number of bits used to repre-
sent the number. A higher number of bits allow for
more precision, however the time taken for operations
increases. Therefore, choice of FP architecture be-
comes a balancing act of speed and precision. Popu-
lar ML library sci-kit-learn uses FP64 by default as it
favours precision. Deep learning frameworks Pytorch
and Tensorflow-keras use FP32 by default as speed is
more important (Radford et al., 2019).
The FP32 architecture, as described by IEEE 754,
is the standardised way of describing any number in
the approximate range of ±1.4 × 10
−45
to ±3.4 ×
10
38
using 32 bits. These 32 bits are split into three
parts that together generate the floating point number.
The first bit represents the sign of the number, bits 1
to 8 represent the exponent and the final 23 bits for
the mantissa. The exponent is responsible for scaling
the number by a power of two, while the mantissa de-
termines the precision by representing the significant
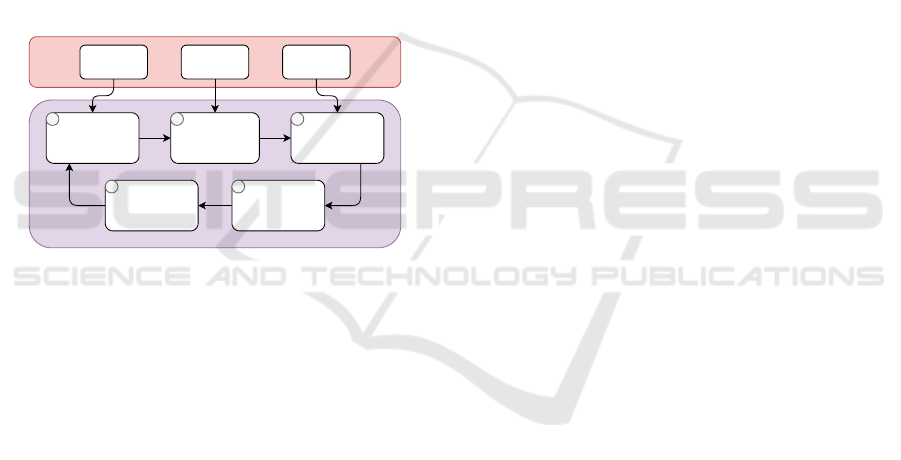
digits, this is shown in Figure 2.
Sign
Exponent Mantissa
1 8 23
Number of bits in single precision IEEE754 floating-point standard
Figure 2: IEEE 754 architecture for storing floating point
numbers with 32 bits.
It is expected that bitflips within the mantissa will
have less impact than bitflips to the sign or exponent.
This is because the sign bit can change the number by
twice its magnitude and the exponent has the potential
to send the number to the extremes of the FP32 range.
Figure 3 shows the average result of performing bit-
flips on one thousand floating points in the range of -3
to 3. It shows that the Mean Absolute Error (MAE)
follows this theory with the first bit in the exponent
having the largest impact. It is also interesting to note
that the first several exponent bits (positions 1-6) re-
sult in more error than the sign bit (position 0).
Figure 3: Mean Absolute Error between FP32 numbers be-
fore and after performing a bitflip across each index.
2.4 Convolutional Neural Networks
IBM defines a Neural Network (NN) as a machine
learning program, or model, that makes decisions in a
manner similar to the human brain by using processes
that mimic the way biological neurons work together
to identify phenomena, weigh options and arrive at
conclusions (IBM, 2024). This program can sound
complex but is made up of simple building blocks in-
cluding, layers and activation functions.
NNs have become a popular choice for a wide
range of tasks, outperforming many traditional mod-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
324

els. This can be partly explained by the universal ap-
proximation theorem, which states that a neural net-
work can approximate any continuous function to a
desired degree of accuracy, given enough neurons and
number of layers (Hornik et al., 1989) (Lu et al.,
2017). This theory underpins the versatility and ef-
fectiveness of neural networks, allowing them to ex-
cel across various applications.
A single neuron is a function that receives a real
value x as input, processes it, and produces a real
value as output. Mathematically, a single neuron can
be described by the Equation (1) where w is called the
weight and b the bias. The simplest form of layer in a
NN is formed by stacking multiple neurons together,
this is called a linear layer or Fully Connected (FC)
layer. This allows for the input to be a vector, x ∈ R
a
and the output is a vector of size r, where W ∈ R
r×a
,
and B ∈ R
r
, this function is expressed in Equation (2).
If a NN is composed of a single layer, it is often re-
ferred to as a perceptron. If many layers are com-
posed together it can be referred to as a Deep Neural
Network (DNN).
f (x) = wx + b x ∈ R (1)
f (x) = W x +B x ∈ R
a
(2)
The weight W and bias B parameters are learnt
through the minimisation of a loss function that eval-
uates the NNs performance on a particular task. De-
pending on the task, this could be mean squared error
or cross-entropy loss which are popular for regression
and classification tasks. Gradient descent is a com-
mon algorithm for minimising the loss and updates
W and B accordingly. This can sometimes result in
overfitting so, regularization is a technique used that
adds an additional term to the loss function to penalise
large weights. This encourages the model to gener-
alise better to patterns by not depending on a few pa-
rameters.
The linear layer, described in Equation (2), is in-
herently limited in its capacity to model complex,
non-linear relationships within the data. This limi-
tation is addressed by the introduction of activation
functions. Activation functions add non-linearity to
the NN and a well chosen activation function is cru-
cial to the success of a NN.
In the field of computer vision, CNNs are used.
They are a DNN composed of a feature engineering
block and classification block. A CNN introduces a
new type of layer called the convolutional layer mod-
elled off the human eye. A convolution is a math-
ematical operation that slides one function over an-
other. In the context of images, a kernel (filter) is
applied across the image to generate feature maps.
Pooling layers are another specialised layer that are
paired with convolutional layers. The pooling layer
aims to reduce the spatial dimension of the feature
maps, this process can be thought of as downsampling
a signal. This reduces computational complexity and
aids the spatial invariance by extracting the most im-
portant features. The most common type of a Pooling
Layer is MaxPooling which takes the largest value in
a kernel. The feature engineering block is made up of
convolutional layers in conjunction with pooling lay-
ers and activation functions.
A three-dimensional array of features is the out-
put of the feature engineering block. This is flattened
and passed to the classification block via a dropout
layer. A dropout layer sets a number of the features
to 0 with probability p. The authors of AlexNet state
that this technique reduces complex co-adaptations of
neurons, since a neuron cannot rely on the presence
of particular other neurons. It is, therefore, forced to
learn more robust features that are useful in conjunc-
tion with many different random subsets of the other
neurons. The classification block uses one or more FC
layers with activation functions to convert the features
into an output. In the final layer, a SoftMax function
is used to convert the output into probabilities of each
class.
3 RELATED WORK
In the 21st century, research on SEEs has been di-
rected towards the testing of AI hardware accelera-
tors such as graphical processing units (GPUs). Paolo
Rech provides a comprehensive review “Artificial
Neural Networks for Space and Safety-Critical Ap-
plications: Reliability Issues and Potential Solutions”
summarising the challenges and potential mitigation
strategies for deploying NNs in environments where
SEEs are a significant concern (Rech, 2024). Rech
states that a drawback of this parallelism in GPUs is
that faults can propagate to multiple values. Therefore
the resulting effect can lead to errors that impede the
safe deployment of DNNs (Su et al., 2023) (Ibrahim
et al., 2020).
How SEE related errors propagate through a DNN
is currently not well understood. Matrix multiplica-
tion is the dominant process within DNNs and is what
AI hardware accelerators are often used to compute.
Therefore to assess the reliability of AI accelerators
and DNN models under the effects of SEEs, beam ex-
periments are used. Beam experiments are performed
at facilities such as ChipIr at the Rutherford Appleton
Laboratory, UK, (Science and Technology Facilities
Council, 2024) and have the capacity to irradiate mi-
A Framework for Developing Robust Machine Learning Models in Harsh Environments: A Review of CNN Design Choices
325

croelectronics with atmospheric-like neutrons.
A detailed study across multiple GPUs was per-
formed by Santos, et al., at ChipIr (Santos et al.,
2019). They show that a single fault tends to prop-
agate to multiple threads, significantly reducing the
reliability of CNNs . Errors with the rectangle dis-
tribution of affected parameters in a tensor were the
most damaging to CNNs, and found to be caused by
faults in the scheduling or the execution of multiple
threads. This is intuitive as the rectangle shape will
typically impact a larger proportion of parameters in
a tensor than the single or line distribution.
Error Correcting Codes (ECCs) reduced the total
number of SDCs, but were unable to reduce the num-
ber of critical errors, which have the potential to im-
pact safety-critical applications. The ECCs suggested
were Algorithm Based Fault Tolerance (ABFT) and
a redesign of the pooling layers. ABFT is a method
where the final row and column of a weight matrix is
used to check the integrity of the weights (Huang and
Abraham, 1984). However Santos states AFBT is un-
able to be implemented on DNNs using NVIDIA pro-
prietary cuDNN libraries. ABFT was however tested
with FFT algorithms on GPUs and shown to be very
promising (Pilla et al., 2014) and where it could be
tested at ChipIr, corrected 60% of the SDCs on the
Tesla K40 and 50% on the Titan X (Santos et al.,
2019).
Pooling layers were another area of interest as
Santos finds that most of the errors corrected by ECC
(single and line) would have been masked by max-
pooling layers. To further improve upon this Santos
suggests choosing the largest “reasonable” number in-
stead of simply choosing the largest number.
A separate beamline experiment on Google’s Ten-
sor Processing Units (TPUs) found critical error
rates of up to 4.73% during image processing tasks
(Rech Junior et al., 2022). This study also explored
the distribution of errors at the output of convolutional
layers. This distribution of affected parameters falls
in line with Santos’s results. A drawback of the beam-
line experiments are the limited number of testing fa-
cilities and inability to run multiple experiments at the
same time. For example Junior et al. had to test the
TPU for more than 241 effective hours (Rech Junior
et al., 2022) (without considering the setup, load in-
put, download output, and reboot time).
To support analysis from beamline experiments,
artificial fault injection algorithms are also used.
SASSIFI is an example of a hardware level algorithm
that injects transient errors in NVIDIA GPU’s (Hari
et al., 2017). Bosio et al. suggested the use of a high
level fault injector, emphasising the independence of
the fault injector from hardware, so that hardening
techniques can be explored for both the DNN archi-
tecture and hardware (Bosio et al., 2019). Their anal-
ysis also showed that mitigation against critical be-
haviours was only required against changes to the ex-
ponent bits.
Introducing faults during the training process is
an alternative strategy to overcoming hardware faults
and shown to be create fault tolerance via the pro-
cess of disabling random nodes during backpropoga-
tion (Sequin and Clay, 1990). This is an old ideas but
there is little exploration into the robustness of models
under this training procedure.
Practical research on SEEs has been shown to be
both viable and valuable, however it is time consum-
ing, costly and limited in terms of the extent of in-
vestigation. Exploring simulated methods can and
should be explored as a complimentary and poten-
tially advantageous alternative. This is the first work
to propose a framework for evaluating the robustness
of neural networks for harsh and safety-critical envi-
ronments coupled with an exploration of CNN design
choices.
4 EXPERIMENTAL SETUP
4.1 CNN Use Case
Image classification for satellite imagery is chosen as
a realistic use case. Satellites exist in an environment
with increased exposure to SEEs and are commonly
equipped with imaging technology. The dataset used
was called “Ships in Satellite Imagery” (also referred
to as Shipsnet) from the popular data science web-
site Kaggle (Hammell, 2018). Each image is made of
three matrices of size 80 by 80. The three matricies
represent the colours red, green and blue with values
in the matrix between 0 and 255 for the intensity. The
first 1000 images are part of the “ship” class with im-
ages centered on the body of a single ship. The author
of the dataset emphasises that there are ships of dif-
ferent sizes, orientations and atmospheric conditions.
The next 1000 are part of the “no-ship” class creating
a binary classification problem.
Many factors go into the design of a CNN and the
CNN for this research has three core requirements to
meet. The CNN must excel at identifying images con-
taining ships, be representative of larger, state-of-the-
art models but also have a fast inference time to allow
for efficient testing before and after SEE simulations.
The number of layers, layer order and layer size dic-
tate the models complexity and is a challenging bal-
ancing act to optimise all requirements. Exploratory
data analysis (EDA) on the dataset showed that the
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
326

Figure 4: Example Images from the Shipsnet Dataset.
CNN architecture did not need to be a complex, state-
of-the-art model with millions of parameters. How-
ever, to be representative of large scale DNNs the
macro architecture of AlexNet was used (Krizhevsky
et al., 2012). This consists of a feature engineering
block made up of convolutional layers, then a classifi-
cation block made of fully connected layers. There is
also a dropout layer with probability p between these
two blocks.
To train this CNN on the Shipsnet dataset, batched
gradient descent is used on a random 80/20 train/test
split of the 2000 samples. The loss function was
CrossEntropyLoss define in Equation (3) which mea-
sures the distance between the true labels and labels
predicted by the CNN. Adam, a version of stochas-
tic gradient descent, was chosen as the optimisation
algorithm to minimise the loss.
L (y, p) = −
C
∑
i=1
y
i
log(p
i
) (3)
A batch size of 16 samples and a learning rate
of 0.001 were chosen to balance training speed and
model generalisation. The training is completed when
either 1000 epochs are reached or the loss is less than
0.01. These values were selected as a loss of 0.01
indicates the predicted labels and true labels lie very
closely. The 1000 epochs limit serves as a safeguard
to stop algorithms that struggle to converge. From
preliminary testing, all models converge within 100
epochs so 1000 epochs was very sufficient.
The hyperparameters explored in the training pro-
cess were regularisation (also known as weight-decay
in the Pytorch) and dropout probability p. Regulari-
sation adds an additional term to the loss function that
represents the squared L2 norm of the model weights
w multiplied by the regularisation coefficient λ seen
in Equation (4). The aim of λ is to control the trade-
off between fitting and overfitting by penalising large
weights (Shalev-Shwartz and Ben-David, 2014). Val-
ues of λ at 0 and 1e-4 are chosen to compare the ef-
fectiveness of regularisation. The dropout probabil-
ity p was explored in an off state, p = 0 and on state
p = 0.5. Meaning that in the on state half of the 800
features are set to 0.
L (y, p) = −
C
∑
i=1
y
i
log(p
i
) +
λ
2
∥w∥
2
(4)
The hyperparameters explored in the CNN archi-
tecture were choice of activation function and the use
of a smart pooling. The choice of activation func-
tion determines the non-linearity of the network and
is arguably the most important hyperparameter. The
following activation functions were explored:
Table 1: Activation Functions.
Function Expression
ReLU ReLU(x) = max(0, x)
Sigmoid Sigmoid(x) =
1
1+exp(−x)
Tanh Tanh(x) =
exp(x)−exp(−x)
exp(x)+exp(−x)
Sinusoidal Sin(x) = sin(x)
Weighted Gaussian WG(x) = x exp(−x
2
)
Rectified WG RWG(x) = max(0, x exp(−x
2
))
Where Weighted Gaussian is defined by the
acronym WG and Rectified Weighted Gaussian,
RWG.
Figure 5: Activation Functions Explored.
ReLU, Sigmoid and Tanh were chosen due to
being well established across a range of NN mod-
els. In particular ReLU is a cornerstone of many
CNNs such as AlexNet (Krizhevsky et al., 2012).
We propose the following two activation functions
specifically designed to handle SEE related errors,
the Weighted Guassian (WG) and Rectified Weighted
Guassian (RWG). The WG and RWG are bounded,
decaying and zero-at-origin as these properties are
hypothesised to aid robustness. This is because ex-
treme changes will decay to 0. The sine function is
included to assess the impact of periodicity, also be-
ing bounded.
Santos suggested the use of smartpooling, but this
has not yet been tested (Santos et al., 2019). There-
fore we test with the use of smartpooling. This CNN
A Framework for Developing Robust Machine Learning Models in Harsh Environments: A Review of CNN Design Choices
327
replaces the MaxPooling layers with smartpooling
layers that ignore unreasonable values (Rech, 2024).
Determining what is “unreasonable” can be done via
many outlier detection techniques, the simplest being
z-score or interquartile ranges. However due to the
extreme magnitudes of resulting floats from bitflips,
particularly at index 1 of the FP 32 architecture, an
even simpler technique was implemented. All abso-
lute values above a threshold were ignored. This aims
to produce a similar result to more advanced outlier
detection methods and serve as a proof of concept.
4.2 Error Model
With a use case and model in place, the final step was
to create an environment to simulate and record the
effects of SEEs. The aim is to bring the simulation as
close as possible to empirical results, noting that there
is very limited research in this area.
Trained CNN Test DatasetAttack Type
Iterate though
each Weight and
Bias Tensor
Perform Attack on
Tensor
Test Perturbated
CNN Model
Record Key
Information
Reset Tensor to
Original State
Inputs
Simulation
1 2 3
45
Figure 6: A high level overview of the simulation environ-
ment.
The overall process for simulation follows the de-
sign in Figure 6. The simulation takes a trained CNN
as input and a test dataset for evaluation that is unseen
data to the CNN. Then the CNN has its weights and
biases erroneously modified (attacked) methodically.
Each attack is self-contained in a weight or bias tensor
and the tensor is reset to the original state after the at-
tack. Therefore the effect of cumulative SDCs are not
investigated, only isolated events. This was an impor-
tant decision to be made as it allows for an individual
analysis of the components that make up the CNN.
Therefore the most influential/vulnerable layers can
be identified. Future work will consider cumulative
effects. During the attack, the CNN is evaluated on
the test dataset and the following key information is
recorded: The norm defined in Equation 5, name of
the layer, location of the attack, accuracy of the CNN
on the test dataset, number of parameters attacked
and proportion of parameters attacked in the tensor.
norm(t
0
,t
1
) = |t
0
−t
1
| (5)
To allow a fair comparison between different CNN
model parametisations the bitflip index and spatial
distribution must be consistent. Single, line and
rectangle are common spatial distributions of SDCs.
However, after preliminary exploration into simula-
tions with these distributions, the line distribution was
found to be catastrophic to the performance of the
CNN. This allows for no comparison between param-
etisations so is unfortunately not a feasible simulation
for a smaller CNN. This critical reduction in perfor-
mance can be attributed to the low number of param-
eters in the CNN where feature channels are as small
as 8. It will likely be more applicable to larger CNNs.
The rectangle distribution is an even more destructive
extension of the line distribution so was also not con-
sidered. This does not pose a problem as SEU is the
most common result of SEEs.
To provide a comprehensive analysis of SEUs, the
process in Figure 6 was repeated. The SEU simula-
tion iterates through all 7634 parameters of the CNN,
providing the most thorough analysis possible. This
rigarous approach was not possible for any MBU sim-
ulation as the number of combinations (subsets) that
can be made from 7634 parameters is 2
7634
, which is
approximately 10
2290
and exceeds practical computa-
tional capabilities.
Representation of a MBU was still desired so we
proposed an approach that used a Gaussian process to
propagate a SEU into an MBU. Spatial distributions
of errors inspired by propagation are not new and have
been implemented by others (Bolchini et al., 2023) to
simulate SEEs.
Algorithm 1 outlines the generation of indices to
be attacked during the MBU simulation. The num-
ber of indices attacked is controlled by the standard
deviation and was varied during the simulation. Due
to the random nature of Algorithm 1, it is repeated
within each layer of the CNN. The number of repe-
titions is the minimum of; the number of parameters
in the layer or one hundred. This mitigates against
repetition of the same indices being selected in small
tensors such as the biases which may contain less than
10 parameters.
Require: Tensor x, Index i, Standard Deviation σ
1: Flatten x into a vector of n values
2: Generate an array A of normal distribution values
with mean i, standard deviation σ, and length n
3: Normalize the values in A between 0 and 1
4: Generate an array B of random uniform values
between 0 and 1 with length n
5: return boolean array C where
C
j
= (B
j
< A
j
) ∀ j ∈ [0, n)
Algorithm 1: MBU Index Selection Algorithm.
Figure 3 shows that the index of the bitflip can
cause a near-zero change or change to the extremities
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
328

of the FP32 architecture. Testing every single index
would be an inefficient use of resources as, aside from
index 0, the MAE is monotonically decreasing as the
bit index increases. This allows for the assumption
that results relating to the bitflip index can be inter-
polated without exhaustive testing. Therefore 7 of the
32 indices were selected to be investigated. The sign
bit, three exponent bits (1,3,6) and three mantissa bits
(10,15,21) were the indices selected. This gives a fair
representation of the three parts of the FP32 architec-
ture. The mantissa bits are skewed towards the lower
indices due to the decreasing change in MAE. This is
because it is expected that the impact would be mini-
mal as the MAE approaches 0.
To summarise the simulation environment, both
SEU and MBU methodologies were outlined. The
SEU simulation exhaustively tests all parameters and
the MBU attacks a selection of parameters propagat-
ing from a single SEU. Regarding the bitflipping, 7 of
the total 32 bits in the FP32 architecture were tested.
All this results in the following number of simula-
tions:
SEU Simulations:
• Factors: 7,634 parameters, 6 activation functions,
7 bit indices, 2 pooling layers, 2 dropout, 2 regu-
larization
• Total: 7, 634 × 6 × 7 × 2 × 2 × 2 = 2, 565, 024
MBU Simulations:
• Factors: 458 initializations, 5 standard deviations,
6 activation functions, 7 bit indices, 2 pooling lay-
ers, 2 dropout, 2 regularization
• Total: 458 × 5 × 6 × 7 × 2 × 2 × 2 = 769, 440
5 EVALUATION
A total of 3,334,464 attacks were simulated follow-
ing the methodology in Chapter 4. 2,565,024 were
performed using the SEU simulation and the remain-
ing 769,440 for the MBU simulation. Table 2 outlines
the distribution of the number of simulations and the
number of single bitflips i.e. SEU attacks is greater
than the number of SEU simulations. This is because
a number of the MBU simulations, with a particularly
low standard deviation, result in only one index being
attacked.
To evaluate how the different model parameter
settings affect the model’s performance with different
error models, we use the test delta, computed as the
difference between the test accuracy before and after
the errors are introduced.
5.1 Simulation
Table 3 offers a summary of the key simulation and
CNN parameters against the test delta. It shows that
there exists complex interactions between these pa-
rameters, where one parameter may only be bene-
ficial in the presence of one or more other parame-
ters. Therefore, the analysis is visualised with many
multidimensional figures. The discussion starts with
the simulation parameters, then delves into the CNN’s
learning parameters and architectural design.
Bitflip location was the most important factor to
the test delta. Figure 8 shows the non-zero test delta
rate at each index. In the mantissa, only 1% of the
simulations had a non-zero test delta, also known as
critical error, with a maximum of only 0.0475 test
delta. Also, the 21st index had zero test delta across
all 476,352 simulations. It is fair to say that all sub-
sequent indices 22-32 will also have zero test delta.
Therefore, assuming a uniform distribution across the
indices flipped, it can be said that a third of bitflips
have a zero test delta, or in other words, no impact.
In the exponent, 27% of the simulations had a non-
zero test delta with the 1st index having the most im-
pact at 52%. It is surprising however, that the 3rd
index had less impact than the 6th. This is due to the
3rd index having a lower average norm than the 6th.
The sign bit had a 12% non-zero test delta placing it
firmly between the exponent and mantissa. Figure 7
supports this as the test delta in the conv1.bias layer
is 300 times smaller in the mantissa than the sign and
exponent. These results fall in line with the hypothe-
sis that the magnitude of the difference caused by the
bitflip is proportional to the impact on the wider CNN.
The Layer attacked within the CNN was another
significant factor to the test delta. Figure 8 shows a
U-shaped pattern for average test delta with respect
to the forward propagation order of the CNN layers.
This points towards the first and final layers of the
CNN architecture being most sensitive to perturba-
tions. The bias layers also exhibit higher test deltas
than the weight layers suggesting they are more sen-
sitive, a result that was also found by Bolchini et al.
(Bolchini et al., 2022). This may be explained by the
formulation in Equation (2) where the bias is a direct
addition to the output vector whereas the weights con-
tribute via a sum-product with the input. However,
Figure 7 points towards a contradiction to this belief.
It shows that the proportion attacked in each layer
varies a significant amount with bias layers reaching
up to 100% and the weight layers reaching no more
than 30%. Therefore the gradient in Figure 7 could
be a more accurate measure of the sensitivity of each
layer as it represents how the model degrades with
A Framework for Developing Robust Machine Learning Models in Harsh Environments: A Review of CNN Design Choices
329
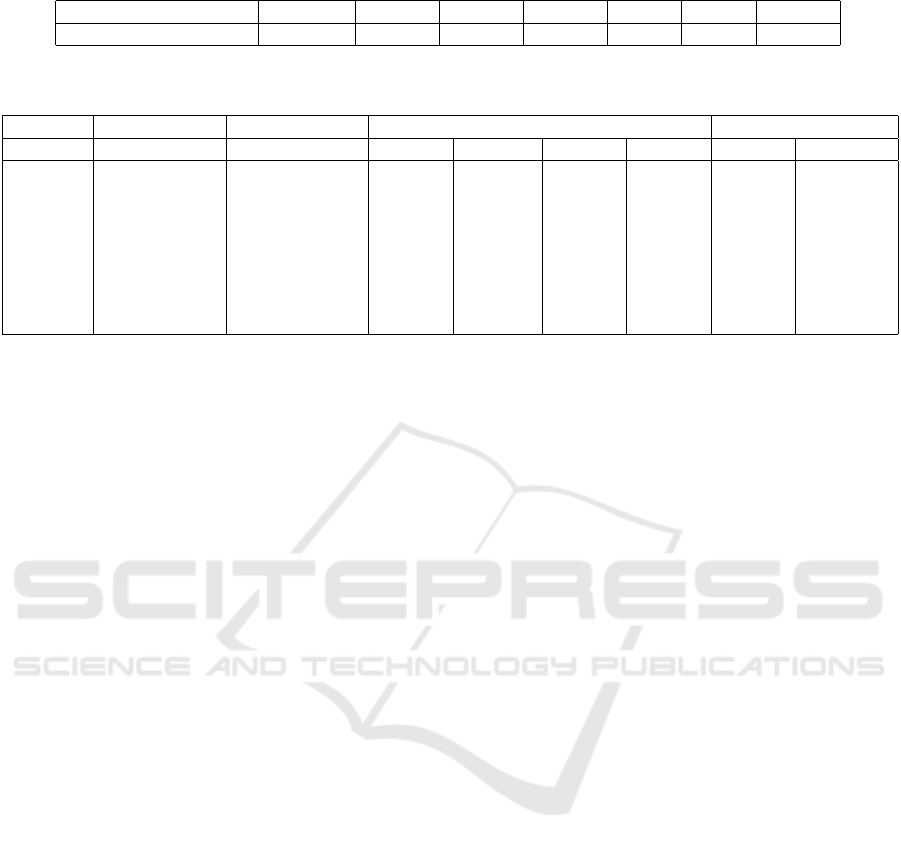
Table 2: Summary of Simulations Performed Following the Methodology in Chapter 4.
Bitflips per Simulation SEU (1) 2-4 5-9 10-14 15-24 25-39 40+
Total # Simulations 2,583,531 192,073 121,599 123,349 96,573 90,157 127,182
Table 3: Average test delta of different CNNs with various setups. The minimal value in each row is marked with an asterisk
(*) and global minima with (**).
Dropout Weight Decay Model Standard Activation Functions Proposed Act. Func.
ReLU Sigmoid Tanh Sine WG RWG
0.0 0.0 CNN 0.02760 0.01784 0.01758 0.01773 0.01347 0.01234*
SmartPoolCNN 0.01809 0.01774 0.01756 0.01750 0.01363 0.01227*
0.0001 CNN 0.02755 0.01731 0.01669 0.02002 0.01318 0.01275*
SmartPoolCNN 0.02126 0.01738 0.01667 0.02023 0.01333 0.01260*
0.5 0.0 CNN 0.02418 0.01834 0.01573 0.01853 0.01322 0.01020**
SmartPoolCNN 0.02241 0.01828 0.01567 0.01857 0.01335 0.01021*
0.0001 CNN 0.02155 0.01892 0.01702 0.01700 0.01314 0.01126*
SmartPoolCNN 0.01931 0.01900 0.01718 0.01689 0.01313 0.01129*
respect to the proportion of the layer attacked. Exam-
ining the gradient finds that the weight matrix in the
first convolutional layer would be the most sensitive
layer with respect to proportion. The most important
takeaway from Figure 7 is that there is a clear linear
relationship between the proportion of the layer at-
tacked and test delta, confirming what Santos stated
(Santos et al., 2019). This is also reflected in Figure
8 where the SEU simulations have a lower test delta
than the MBU simulations.
Dropout was a factor during the training of the
models with the purpose of improving robustness.
Averaged over all the results it reduced the average
test delta from 0.0172 to 0.0164. Figure 9 summarises
the impact per activation function and there was a
reduction in test delta across all activation functions
bar the sigmoid function. During training, the sig-
moid function also faced difficulties with the use of
dropout. It is not clear why this is the case and would
be an area of future work. The two rectified functions
had the largest decrease in test delta. This could be
due to the sparsity of rectified functions and dropout
further amplifying the sparsity, forcing a multitude of
neural pathways to form, similar to ensemble models
which are naturally robust.
Regularisation was the least impactful parame-
ter to the test delta having an insignificant average in-
crease to the test delta of 0.0001 over all the results.
Regularisation only had a benefit when the ReLU ac-
tivation function and dropout were used, shown in Ta-
ble 3. The reason for this could follow a similar trail
of thought to the interaction between the ReLU acti-
vation function and dropout, further reinforcing more
neural pathways.
The choice of Activation Function has been
lightly touched upon in the last two paragraphs and
was the most significant factor to test delta within the
CNN architecture. Moving left to right in Table 3,
the activation function with the highest test delta was
ReLU. This was unsurprising as all other activation
functions were bounded, so extreme values passed
though bounded functions do not propagate through
the CNN. The bounding of values also explains why
the use of smart pooling was only effective with the
ReLU function, showing a 16% reduction to the av-
erage test delta. The well known bounded activa-
tion functions, sigmoid, tanh and sine achieved simi-
lar levels of average test delta, around 0.017 and tanh
reached an even lower 0.015 test delta with dropout
and no regularisation. The proposed activation func-
tions consistently achieved a lower test delta across all
training parameters. An explanation for this could be
the decaying property of the WG function. This cre-
ates an “active” region so that only a small range of
values produce a non-zero output, essentially bound-
ing the range of values in a similar manner to smart-
pooling. The RWG performs even better than the WG
function and has an even smaller “active” region. The
best model, at 0.01 average test delta, used the RWG
activation function, dropout at p = 0.5, no regularisa-
tion and no smartpooling. However the difference be-
tween using smartpooling or not was negligible. This
was a 58% reduction in error over the use of ReLU.
The Norm was a measure of the difference be-
tween the original tensor and attacked tensor, defined
in equation (5). It is a direct reflection of the bit index
and number of bitflips. Figure 10 shows the relation-
ship between the log of the norm and the test delta
across the eight layers in the CNN. As expected, there
is a positive correlation between the log norm and the
test delta across all layers. In some of these layers
a slight S-shape can be observed. This can point to-
wards the idea that the relationship is not strictly lin-
ear. Therefore, there may be resilience to small per-
turbations up to a critical norm value, then a satura-
tion point where the layer stops functioning so fur-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
330
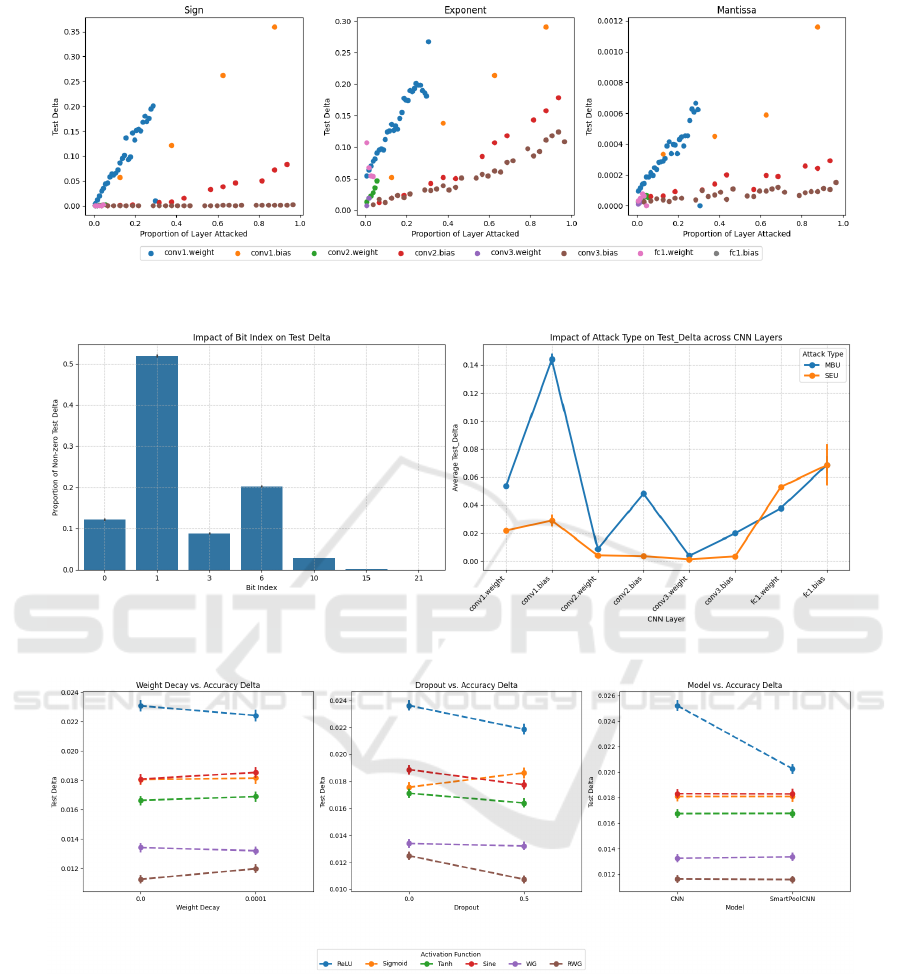
Figure 7: The average test delta in the Sign (left), Exponent (middle), Mantissa (right) part of the FP32 architecture against
the portion of the layer attacked.
Figure 8: Proportion of non-zero Test Deltas across Bit Indices (left), Average Test Delta across layers in the CNN (right).
Figure 9: The average test delta of Regularisation (left), Dropout (middle), Model (right) across the six activation functions.
ther attacks have nothing to degrade. The horizontal
grey lines represent test delta values of 0.01 and 0.1
and can be used to assess the sensitivity of each layer.
The first weight matrix breaks these thresholds with
the smallest log norms which reinforces the idea that
is the most sensitive layer.
5.2 Testing AlexNet
A final test was performed using AlexNet. It explored
the novel RWG activation function and smartpool-
ing. Due to computational constraints the CIFAR-
100 dataset was used and includes 60,000 images with
100 different labels (Krizhevsky, 2009). Therefore the
final layer of AlexNet had to be resized to the 100
classes instead of 1000. Also the images in CIFAR-
100 were scaled up to 224x224 pixels and normalised.
A Framework for Developing Robust Machine Learning Models in Harsh Environments: A Review of CNN Design Choices
331
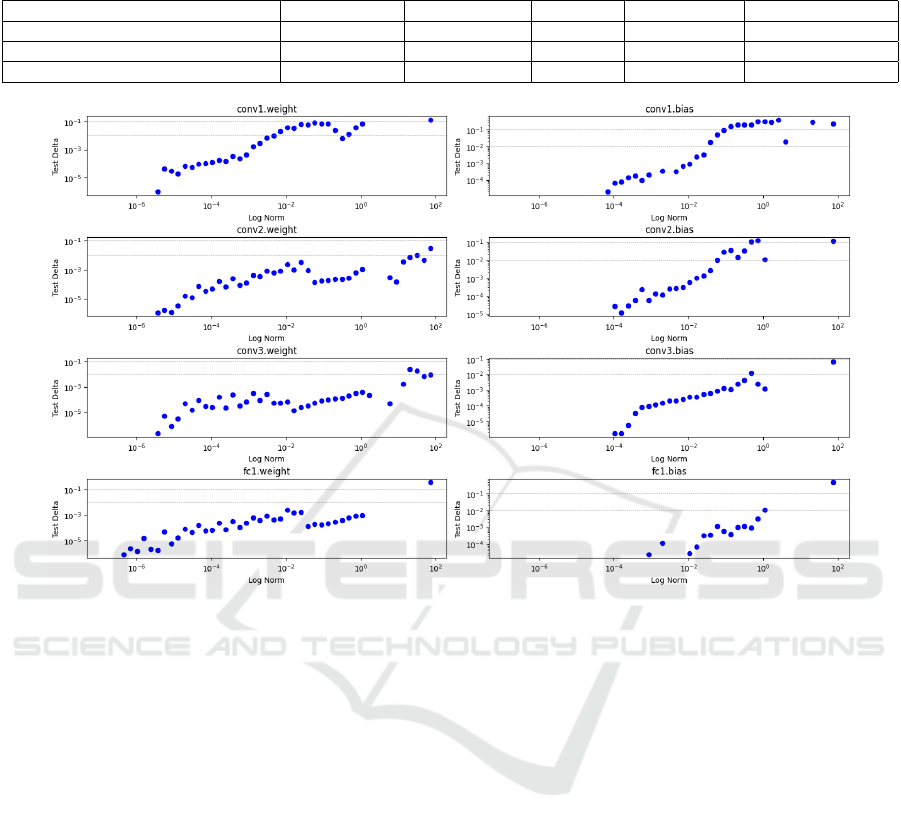
Table 4: Comparison of Alexnet models on CIFAR-100. *Training epochs from weights copied from training Alexnet with
ReLU.
Model Type Test Accuracy SEU Accuracy Test Delta # Simulations # Training Epochs
Alexnet with ReLU 0.717100 0.312881 0.404219 160 20
Alexnet with RWG
0.01
0.742900 0.663311 0.079589 160 20* + 5
Alexnet with ReLU and smartpooling 0.707600 0.403594 0.304006 160 20*
Figure 10: Log of the Norm against test delta in each layer of the CNN.
It was quickly realised that training AlexNet was
computationally expensive so transfer learning was
used. A pretrained version of AlexNet was down-
loaded and, after transfer learning, achieved a 71.7%
test accuracy shown in Table 4. A special variant of
the RWG function defined in Equation (6) allowed
the use of transfer learning from AlexNet (which uses
ReLU) to a version of AlexNet with the RWG
K
ac-
tivation function. This further transfer learning was
successful and additional training epochs added a few
extra percent to the test accuracy. Smartpooling had
the advantage of not needing any further training, just
the replacement of the pooling layers with smartpool-
ing layers. This did however reduce the test accuracy
by 1%.
RWG
K
(x) = max(0, x exp(−Kx
2
))
=⇒ lim
K→0
RWG
K
(x) = ReLU(x)
(6)
With only 160 SEUs, equating to 10 SEUs per
layer in AlexNet, this is far from a thorough exper-
iment. Additionally, only the first exponent bit was
flipped as it has the highest impact. Therefore the
weight these results carry is up to the reader’s judge-
ment. However, there is an indicative difference be-
tween Alexnet with ReLU, Alexnet with RWG
0.01
and Alexnet with ReLU and smartpooling.
6 CONCLUSION
To conclude, a framework to simulate and test the ef-
fects of SEEs was built with the Pytorch library. A
third of simulated SEEs have minimal impact due to
small changes in the mantissa. There exists a linear
relationship between the proportion of the layer at-
tacked and test delta. The use of dropout during train-
ing improves robustness but regularisation does not.
Smartpooling layers were beneficial in conjunction
with ReLU. The proposed activation function RWG
was the most robust to simulated SEEs and transfer
learning can be used to convert CNNs using ReLU to
RWG
K
. Small norms (e.g. less than 10
−6
) have mini-
mal impact on the test delta. Future work will include
validated error models and evaluating robustness with
state-of-the-art models.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
332

REFERENCES
Badaroglu, M. (2021). More moore. In 2021 IEEE Inter-
national Roadmap for Devices and Systems Outbriefs,
pages 01–38.
Binder, D., Smith, E. C., and Holman, A. B. (1975). Satel-
lite anomalies from galactic cosmic rays. IEEE Trans-
actions on Nuclear Science, 22(6):2675–2680.
Bolchini, C., Cassano, L., Miele, A., and Nazzari, A.
(2022). Selective hardening of cnns based on layer
vulnerability estimation. In 2022 IEEE International
Symposium on Defect and Fault Tolerance in VLSI
and Nanotechnology Systems (DFT), pages 1–6.
Bolchini, C., Cassano, L., Miele, A., and Toschi, A. (2023).
Fast and accurate error simulation for cnns against soft
errors. IEEE Transactions on Computers, 72(4):984–
997.
Bosio, A., Bernardi, P., Ruospo, A., and Sanchez, E. (2019).
A reliability analysis of a deep neural network. In
2019 IEEE Latin American Test Symposium (LATS),
pages 1–6.
Bureau, A. T. S. (2008). In-flight upset 154 km west of
learmonth. Australian Transport Safety Bureau.
Hammell, R. (2018). Ships in satellite imagery.
Hari, S. K. S., Tsai, T., Stephenson, M., Keckler, S. W., and
Emer, J. (2017). Sassifi: An architecture-level fault
injection tool for gpu application resilience evalua-
tion. In 2017 IEEE International Symposium on Per-
formance Analysis of Systems and Software (ISPASS),
pages 249–258.
Hornik, K., Stinchcombe, M., and White, H. (1989). Multi-
layer feedforward networks are universal approxima-
tors. Neural Networks, 2(5):359–366.
Huang, K.-H. and Abraham, J. A. (1984). Algorithm-based
fault tolerance for matrix operations. IEEE Transac-
tions on Computers, C-33(6):518–528.
IBM (2024). Neural networks. https://www.ibm.com/
topics/neural-networks. Accessed: 2024-08-26.
Ibrahim, Y., Wang, H., Liu, J., Wei, J., Chen, L., Rech, P.,
Adam, K., and Guo, G. (2020). Soft errors in dnn ac-
celerators: A comprehensive review. Microelectronics
Reliability, 115:113969.
IEEE754 (2019). IEEE Standard for Floating-Point Arith-
metic. IEEE Std 754-2019 (Revision of IEEE 754-
2008), pages 1–84.
Krizhevsky, A. (2009). Learning multiple layers of features
from tiny images. Technical Report.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C., Bottou, L.,
and Weinberger, K., editors, Advances in Neural In-
formation Processing Systems, volume 25. Curran As-
sociates, Inc.
Lu, Z., Pu, H., Wang, F., Hu, Z., and Wang, L. (2017). The
expressive power of neural networks: A view from the
width.
Moore, G. (1998). Cramming more components onto inte-
grated circuits. Proceedings of the IEEE , 86(1):82–85.
Peterson, E. (2011). Introduction, chapter 1, pages 1–12.
John Wiley & Sons, Ltd.
Pilla, L. L., Rech, P., Silvestri, F., Frost, C., Navaux, P.
O. A., Reorda, M. S., and Carro, L. (2014). Software-
based hardening strategies for neutron sensitive fft al-
gorithms on gpus. IEEE Transactions on Nuclear Sci-
ence, 61(4):1874–1880.
Radford, A., Wu, J., Child, R., Luan, D., Amodei, D., and
Sutskever, I. (2019). Language models are unsuper-
vised multitask learners.
Rech, P. (2024). Artificial neural networks for space and
safety-critical applications: Reliability issues and po-
tential solutions. IEEE Transactions on Nuclear Sci-
ence, 71(4):377–404.
Rech Junior, R. L., Malde, S., Cazzaniga, C., Kastriotou,
M., Letiche, M., Frost, C., and Rech, P. (2022). High
energy and thermal neutron sensitivity of google ten-
sor processing units. IEEE Transactions on Nuclear
Science, 69(3):567–575.
Santos, F. F. d., Pimenta, P. F., Lunardi, C., Draghetti, L.,
Carro, L., Kaeli, D., and Rech, P. (2019). Analyzing
and increasing the reliability of convolutional neural
networks on gpus. IEEE Transactions on Reliability,
68(2):663–677.
Science and Technology Facilities Council (2024). Chipir.
[Accessed 01-10-2024].
Sequin, C. and Clay, R. (1990). Fault tolerance in artifi-
cial neural networks. In 1990 IJCNN International
Joint Conference on Neural Networks, pages 703–708
vol.1.
Shalev-Shwartz, S. and Ben-David, S. (2014). Understand-
ing Machine Learning: From Theory to Algorithms.
Cambridge University Press. Chapter 13: Regulariza-
tion and Stability.
Su, F., Liu, C., and Stratigopoulos, H.-G. (2023). Testabil-
ity and dependability of ai hardware: Survey, trends,
challenges, and perspectives. IEEE Design & Test,
40(2):8–58.
VAN ALLEN, J. A., LUDWIG, G. H., RAY, E. C., and
McILWAIN, C. E. (1958). Observation of high in-
tensity radiation by satellites 1958 alpha and gamma.
Journal of Jet Propulsion, 28(9):588–592.
Wallmark, J. T. and Marcus, S. M. (1962). Minimum
size and maximum packing density of nonredundant
semiconductor devices. Proceedings of the IRE,
50(3):286–298.
A Framework for Developing Robust Machine Learning Models in Harsh Environments: A Review of CNN Design Choices
333
