
Evaluating Homography Error for
Accurate Multi-Camera Multi-Object Tracking of Dairy Cows
Shunpei Aou
a
, Yota Yamamoto
b
, Kazuaki Nakamura
c
and Yukinobu Taniguchi
d
Department of Information and Computer Technology, Faculty of Engineering, Tokyo University of Science, Tokyo, Japan
Keywords:
Multi-Object Tracking, Image Recognition.
Abstract:
In dairy farming, accurate and early detecting of the signs of disease or estrus in dairy cows is essential
for improving both health management and production efficiency. It is well-known that diseases or estrus
in dairy cows are reflected in their activity levels, and monitoring behaviors such as walking distance and
periods of feeding, drinking, and lying down time serves as a means to detect these signs. Therefore, tracking
the movement of dairy cows can provide insights into their health condition. In this paper, we propose a
tracking method that addresses homography errors, which have been identified as one of the causes of reduced
accuracy in the location-based multi-camera multi-object tracking methods previously used for tracking dairy
cows. Additionally, we demonstrate the effectiveness of the proposed method through validation experiments
conducted in two different barn environments.
1 INTRODUCTION
The accurate and early detection of signs of disease
and estrus in dairy cows is essential for maintain-
ing their health and improving milk production effi-
ciency. These signs are known to be observed in the
amount of movement of dairy cows (Mar et al., 2023),
and tracking dairy cows is an important step in herd
management. Therefore, tracking the movement of
dairy cows is an important step toward monitoring the
health of individual cows.
We aim to realize a multi-camera multi-object
tracking system that can consistently track the move-
ments of dairy cows in a barn. In order to track
the movements of dairy cows moving freely around
a large barn, we use multiple cameras installed on
the ceiling of the barn and track the cows from the
video images. As the cows’ appearance in the im-
ages strongly depends on camera angle, it is difficult
to use existing multi-camera multi-object tracking ap-
proaches.
(Aou et al., 2024) proposed a location-based
multi-camera dairy cow tracking method by focusing
on the fact that adjacent cameras have fields of view
a
https://orcid.org/0009-0002-4728-3979
b
https://orcid.org/0000-0002-1679-5050
c
https://orcid.org/0000-0002-4859-4624
d
https://orcid.org/0000-0003-3290-1041
that partially overlap. Rather than appearance fea-
tures, this method uses the overlap degree (Intersec-
tion over Union) between bounding boxes in track-
ing objects across the barn coordinates. Using this
method, they achieved tracking in a single barn envi-
ronment (MOTA 85.6%, IDF1 68.9%). A preliminary
experiment revealed that the main cause of poor ac-
curacy is the error in tracking individuals (ID switch)
that can occur when a dairy cow crosses the shared
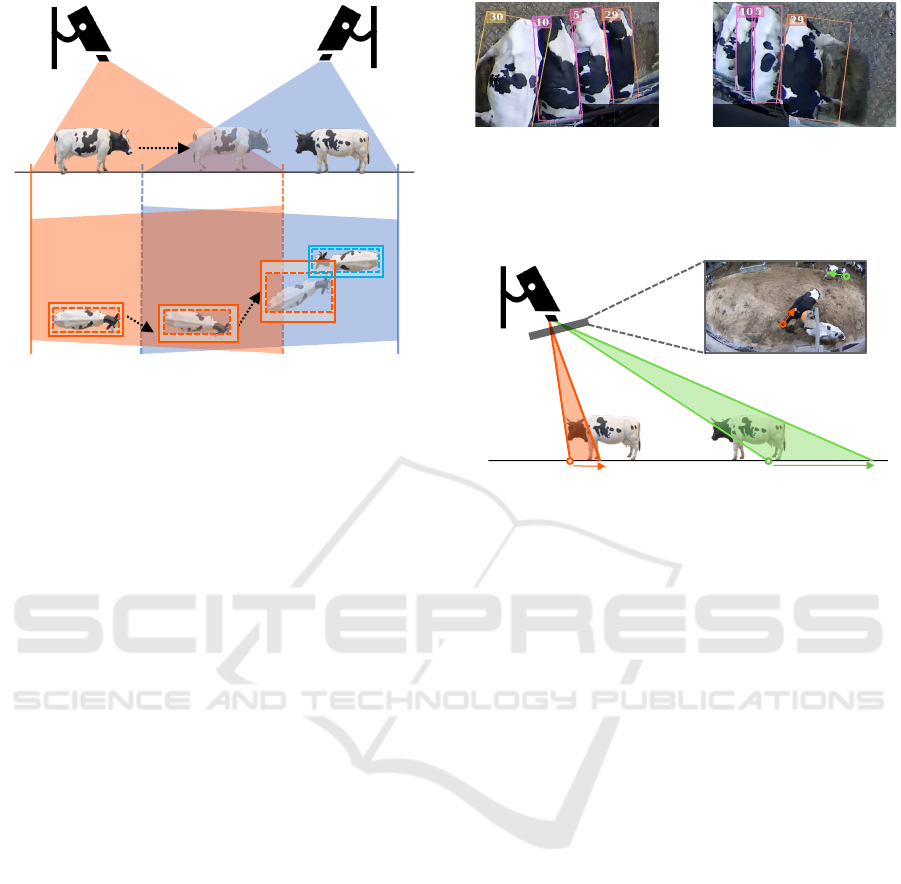
field of view of the cameras. As shown in Figure 1,
when individual A moves from Cam1 to Cam2, ho-
mography error in the bounding boxes yielded by ho-
mography increases, and there are cases where one
bounding box overlaps another (that of individual
B). The homography error increases close to the im-
age edges, so the frequency of ID switches increases
around the camera boundaries. (Aou et al., 2024)
minimized ID switches by offsetting the distortion
from projective transformations through the use of ro-
tated bounding boxes, but homography error, which is
determined by the camera installation angle, was not
considered. Also, since the accuracy of the bound-
ing boxes was not verified, the impact of the accuracy
of the detector on the tracking accuracy could not be
elucidated.
This paper proposes a method for multi-camera
tracking of dairy cows that considers homography er-
ror to improve the tracking accuracy. As will be ex-
plained later, homography error is dependent on the
Aou, S., Yamamoto, Y., Nakamura, K. and Taniguchi, Y.
Evaluating Homography Error for Accurate Multi-Camera Multi-Object Tracking of Dairy Cows.
DOI: 10.5220/0013160900003912
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
675-682
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
675
Cam 1
Cam 2
World Coordinate
Time t
Time t+2
Cam 1
Cam 2
A
A B
A
Time t
Time t+1
Time t+2
B
A
ID Switch
A
Figure 1: A case of tracking error caused by ID switch.
As CowA approaches the edge of Cam1, the bounding box
becomes distorted due to the increase in homography error,
resulting in ID switch between CowA and CowB.
position and orientation of each camera, so it cannot
be dealt with simply by excluding the edges of the
camera. In addition, we will verify the generality of
the proposed method by confirming its effectiveness
in barn environments that differ from those examined
in previous research.
The contributions of this paper are as follow: (i) a
robust tracking method is proposed for multi-camera
multi-object tracking that utilizes the homography er-
ror and is robust to the camera installation angle, (ii)
the confirmation of the generality of the proposed
method by verifying it in two typical but different
barn environments, (iii) the comparison of tracking
accuracy excluding the influence of detection accu-
racy by creating ground truth bounding box data in
two barn environments.
2 RELATED WORKS
Multi-Camera Multi-Object Tracking. Object
tracking methods can be classified into two cate-
gories: those that use the appearance features of the
target to be tracked and those that use only location
information.
Ristani et al.(Ristani and Tomasi, 2018) proposed
multi-camera multi-object tracking using appearance
and motion features obtained from a network that has
learned the features of objects in advance. Using ap-
pearance features makes it possible to perform multi-
camera multi-object tracking without location infor-
mation of cameras. However, it is not suitable for
tracking animals. Figure 2 shows the same dairy cows
Cam 2Cam 1
Figure 2: Appearance features extracted from different an-
gled cameras are significantly different. The spotted pat-
terns of cow ID=5 are completely different between cam-
eras.
Δ𝑥
!
"
< Δ𝑥
#
"
Δ𝑥
!
"
Δ𝑥
!
∆𝑥
#
Δ𝑥
!
= ∆𝑥
#
Δ𝑥
#
"
𝐴
𝐵
𝐴
"
𝐵
"
Figure 3: Homography error variation based on the distance
between the image center and the cow. A and B are two
points in the camera image, A
′
and B
′
are their barn coor-
dinates after homography transformation. Given uniform
perturbations of equal magnitude, ∆x
1
= ∆x
2
, the error in
barn coordinates of B, ∆x
′
2
, will exceed that of A, ∆x
′
1
. This
error depends on the angle between the camera, the optical
axis, and the floor. If the camera is positioned directly over-
head, ∆x
′
1
equals ∆x
′
2
.
as seen by two cameras with a shared field of view.
The appearance features of these cows differ greatly
between cameras due to the difference in camera ori-
entation.
Location-based multi-camera multi-object track-
ing methods such as (Bredereck et al., 2012; Eshel
and Moses, 2008; Fleuret et al., 2008) have been pro-
posed; they can track using only the location infor-
mation of the target to be detected. Thus they can
also be applied to animal tracking (Akizawa et al.,
2022; Aou et al., 2024; Shirke et al., 2021; Yamamoto
et al., 2024). (Aou et al., 2024) proposed a location-
based multi-camera multi-object tracking method that
uses homography for multi-camera tracking of dairy
cows. This method (i) detects cows as rotated bound-
ing boxes in all camera images, (ii) integrates them
by projecting the rotated bounding boxes obtained
from the multi-cameras onto barn coordinates using
homography transformation and (iii) tracks cows in
the barn coordinates using Simple Online and Real-
time Tracking (SORT) (Bewley et al., 2016). By
calibrating the correspondence between camera co-
ordinates and barn coordinates in advance, it is pos-
sible to project dairy cows into a barn coordinates
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
676

(iii) Inter-Camera
Individual Association
Cam 1
Cam 2
(iv) Inter-Camera Tracking
Cam N
(i)Cow Detection (ii) Select Reliable Rectangle
Using Homography Error
Cam 1 Cam 2 Cam N
(a)
Camera
Calibration
(b) Homography Error Estimation
Cam 1 Cam 2
Cam 1
Cam 2
Cam N
Barn Coordinates
Barn Coordinates
Projection
Figure 4: Overview of the proposed multi-camera dairy cow tracking method. In advance, camera calibration and homography
error estimation are performed. Online processing consists of 4 steps (i) Detecting cows as rotated bounding boxes, (ii)
Selecting reliable bounding boxes using homography error, (iii) Projecting the detected bounding boxes onto a common barn
coordinates and integrating the same individual between multiple cameras, (iv) Tracking individuals in barn coordinates using
the SORT tracking algorithm (Bewley et al., 2016).
and track them throughout the entire barn. However,
the method does not account for homography error
caused by the distance between the camera and the
dairy cow.
Homography Error in Multi-Camera Multi-
Object Tracking. (Derek et al., 2024) addressed the
issue of homography error to improve the accuracy of
multi-camera vehicle tracking. Since homography er-
ror can occur when the camera shakes due to wind,
etc., they reduced homography error beyond that at-
tained by existing image stabilization by performing
homography re-estimation. On the other hand, be-
cause this study assumes that the cameras are fixed
and indoors, the cameras are deemed to have a wide-
angle lens, and the distance between the camera and
the dairy cow varies depending on the location, so
static homography error like the one shown in Fig-
ure 3 occurs. The aim is to suppress the homography
error that arises from changes in the dairy cow’s pose
and errors contained in the object detection bounding
box, which differs from (Derek et al., 2024) in that it
is applied to the tracking method.
3 PROPOSED METHOD
We propose a multi-camera tracking method that
takes into account homography error. Figure 4 shows
an overview of the proposed method. The method
consists of two preparation steps and four online
steps.
3.1 Preparation Steps
(a) Camera Calibration. We start with camera cal-
ibration to obtain camera parameters and lens distor-
tion coefficients. The extrinsic camera parameters de-
fine 3D projective transformation from camera coor-
dinates to the world coordinates.
We assume a pinhole camera model with simple
lens distortion:
p
d
∼ K(S|t)P, p = f (p
d
;k). (1)
Here, P = (X ,Y,Z, 1)
T
is the homogeneous coordi-
nates of a 3D point in the world coordinates, and
the 3D plane Z = 0 is taken as the floor of the barn.
p = (x,y, 1)
T
is the homogeneous coordinates of a 2D
point in the camera image, p
d
= (x
d
,y
d
)
T
are the ho-
mogeneous coordinates after distortion correction, f
is the function that corrects the distortion, K and (S|t)
are intrinsic and extrinsic camera parameters of the
camera, respectively, where t is the translation vector
of the camera, and k is the distortion coefficient.
The camera parameters are calculated using
Zhang’s method (Zhang, 2000) from multiple pairs
of 3D world coordinates points P i = (X
i
,Y
i
,Z
i
)
T
and
corresponding 2D image points p
i
= (x
i
,y
i
)
T
. The
correspondence between these points is obtained by
manually mapping the coordinates in the camera to
the world coordinates in advance.
The homography or the planar projection transfor-
mation from the camera coordinates to the reference
plane Z = C
h
parallel to the floor of the barn is calcu-
Evaluating Homography Error for Accurate Multi-Camera Multi-Object Tracking of Dairy Cows
677

lated by
M = (K(s
1
,s
2
,t +C
h
s
3
))
−1
. (2)
In this paper, the 2D coordinates (X,Y ) on the refer-
ence plane is referred to as 2D barn coordinates, and
C
h
is defined as the height from the floor to the top of
the cow’s back (Yamamoto et al., 2024).
(b) Homography Error Estimation. If the undis-
torted camera coordinates p
d
= (x
d
,y
d
) and the ho-
mography matrix
M =
m
11
m
12
m
13
m
21
m
22
m
23
m
31
m
32
m
33
, (3)
the 2D barn coordinates P
w
= (X
w
,Y
w
) can be ob-
tained by
X
w
=
m
11
x
d
+ m
12
y
d
+ m
13
m
31
x
d
+ m
32
y
d
+ m
33
, (4)
Y
w
=
m
21
x
d
+ m
22
y
d
+ m
23
m
31
x
d
+ m
32
y
d
+ m
33
. (5)
Next, partial differentiation of X
w
with respect to im-
age coordinates (x
d
,y
d
) are:
∂X
w
∂x
d
=
m
11
− m
31
x
d
m
31
x
d
+ m
32
y
d
+ m
33
, (6)
∂X
w
∂y
d
=
m
12
− m
32
y
d
m
31
x
d
+ m
32
y
d
+ m
33
. (7)
Similarly, the partial derivative of Y
w
can also be ob-
tained. Using these partial derivatives, the distance
from the pixel to the adjacent pixel can be obtained.
If the position of pixel p
d
is perturbed by ∆p
d
=
(∆x
d
,∆y
d
)
T
, the displacement in the 2D barn coor-
dinates system ∆P
w
= (∆X
w
,∆Y
w
)
T
can be approxi-
mated as:
∆P
w
≈
∂(X
w
,Y
w
)
∂(x
d
,y
d
)
∆p
d
, (8)
where ∂(X
w
,Y
w
)/∂(x
d
,y
d
) is the Jacobian matrix of
(X
w
,Y
w
). Then we have
∥∆P
w
∥ ≈
∂(X
w
,Y
w
)
∂(x
d
,y
d
)
∆p
d
≤
∂(X
w
,Y
w
)
∂(x
d
,y
d
)
F
∥∆p
d
∥ (9)
where ∥ · ∥
F
is the Frobenius norm. Here, homogra-
phy error is defined as HE(x
d
,y
d
) =
∂(X
w
,Y
w
)
∂(x
d
,y
d
)
F
. We
calculate the homography error by numerical differ-
entiation, specifically compute the average displace-
ment of the eight neighboring pixels of a target pixel
(x,y):
HE(x,y) ≈
1
8
∑
i
∥∆P
i
∥, (10)
as illustrated in Figure 5.
1 2 3
4 N 5
6 7 8
𝐻𝐸(𝑥, 𝑦) ≈
∑
∆𝑃
!
"
#
8
∆𝑃
!
Camera Coordinates Barn Coordinates
Projection
Figure 5: Homography error estimation by numerical differ-
entiation. The estimation uses the distance between pixels
when projecting adjacent pixels in camera coordinates onto
barn coordinates.
3.2 Online Steps
(i) Cow Detection Using Rotated Bounding Boxes.
Rotated bounding boxes can be detected using detec-
tors such as YOLOV5 (Hu, 2020) or YOLOV8 (Ultra-
lytics, 2024). In this method, we track dairy cows us-
ing rotated bounding boxes as they offer tight bound-
ing box detection for dairy cows.
(ii) Selecting Reliable Bounding Boxes Using
Homography Error. The bounding box to be pro-
jected onto the barn coordinates is selected using the
homography error obtained in 3.1. When the center
coordinates of the detection bounding box is p
c
=
(x
c
,y
c
)
T
, the bounding box for which HE(p
c
) < T
HE
is adopted as a bounding box with high reliability.
T
HE
is the threshold of homography error.
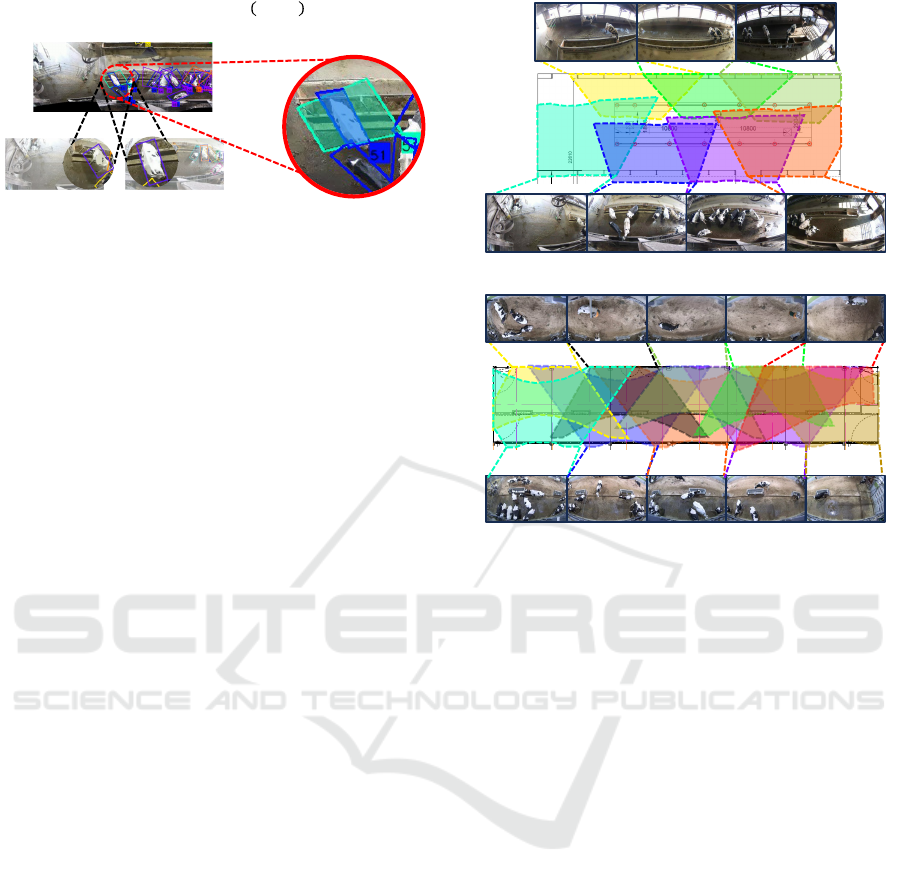
(iii) Inter-Camera Individual Association. This
step integrates the individual dairy cows that cross
multiple cameras. Figure 6 shows the flow from the
perspective transformation to the integration. Us-
ing the homography transformation and the plane
projection transformation parameters obtained ear-
lier, bounding box R is projected onto common barn
coordinates. In this case, R = (x,y,w, h, θ) is a
bounding box with a center point (x,y), width w,
height h, and rotation angle θ; the four vertices of
R are r
l
= (x ± (wcosθ − h sin θ)/2,y ± (w cos θ −
hsinθ)/2)(l = 1,2,3,4). The points projected onto
barn coordinates are represented by rectangle R
′
l
=
M f (r
l
;k).
Let R
′
a
and R
′
b
be the rectangles of R
a
and R
b
projected onto the barn coordinates. If Intersection
over Union IoU(R
′
a
,R
′
b
) = |R
′
a
∩R
′
b
|/|R
′
a
∪R
′
b
| exceeds
a certain threshold, it is determined that R
′
a
and R
′
b
correspond to the same individual and are integrated.
Specifically, we use the Hungarian method to find
a one-to-one correspondence between the rectangle
projected from adjacent cameras. In this case, we in-
tegrate them as the same individual when IoU > 0.1.
(iv) Inter-Camera Tracking. We track cows us-
ing bounding boxes integrated in barn coordinates. In
this study, we use the SORT method (Bewley et al.,
2016) for tracking on the barn coordinates of dairy
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
678
𝑅
!
Projection
𝑅
!
"
𝑅
#
"
𝐼𝑜𝑈 𝑅
!
"
, 𝑅
#
"
= |𝑅
!
"
∩ 𝑅
#
"
|/|𝑅
!
"
∪ 𝑅
#
"
|
𝑖𝑓-𝐼𝑜𝑈 > 0.5: Association
𝑅
#
Figure 6: The process from bounding box projection trans-
formation to integration. R
a
and R
b
indicate the same cow.
If the overlap of R
′
a
and R
′
b
is higher than 0.5, these bound-
ing boxes are associated with the same cow in barn coordi-
nates.
cows. In order to enable tracking using SORT, we ap-
proximate the rectangle R
′
into bounding box V by
taking the average of the inscribed and circumscribed
bounding boxes of the rectangle projected onto barn
coordinates. By matching this bounding box with the
bounding box V
′
predicted by the Kalman filter, the
tracking trajectory in barn coordinates is updated.
4 EXPERIMENTS
We conducted an experiment to demonstrate the ef-
fectiveness of the proposed method. Specifically,
we compared the accuracy of the proposed location-
based method with that of a feature-based tracking
method, with and without homography error (HE).
4.1 Datasets
We constructed two video datasets corresponding to
major types of barns: free-stall and free-range barns.
In free-stall barns, the feeding area and sleeping area
are separate, whereas in free-range barn, dairy cows
can sleep wherever they like. (Akizawa et al., 2022;
Aou et al., 2024) only conducted experiments in the
feed area of a free-stall barn, so the effectiveness of
the system in environment with dairy cows in various
poses, such as a free-range barn, was not confirmed.
The videos were recorded with multi-cameras in-
stalled on the ceiling of barns at Obihiro University of
Agriculture and Veterinary Medicine. Each dairy cow
in the videos was manually annotated with the correct
data, including rotated bounding boxes and the indi-
vidual ID.
Free-Stall Barn Dataset. The dataset consists
of 47-minute video recorded synchronously by seven
barn cameras. The cameras covered the feeding area,
as shown in Figure 7a, to comprehensively capture the
movement of dairy cows. The adjacent cameras were
arranged to partially share their fields of view. The
Barn Coordinates
(a) Free-stall barn
Barn Coordinates
(b) Free-range barn
Figure 7: Camera layout in each barn dataset. The barn co-
ordinates represent the shape of each camera’s image when
projected onto a panoramic view of the barn.
dataset was split into two subsets: 17-minute videos
(15:40 - 15:57) for training the appearance feature ex-
tractor, and 30-minute videos (15:57 - 16:27) for eval-
uating the tracking system. The number of individu-
als was 63, and the number of bounding box pairs was
20,926.
Free-Range Barn Dataset. The dataset consists
of 40-minute video recorded synchronously by ten
barn cameras. The cameras covered the entire area of
a free-range barn, see Figure 7b. The dataset was split
into two subsets: 10-minute videos (05:20 - 05:30)
for training the feature extractor, 30-minute videos
(05:30 - 06:00) for evaluating tracking. The number
of individuals was 43, and the number of bounding
box pairs was 94,734.
4.2 Tracking Metrics
We use Multi-Objects Tracking Accuracy (MOTA)
(Bernardin and Stiefelhagen, 2008) and Identification
F1 (IDF1) (Ristani et al., 2016) to evaluate tracking
accuracy. MOTA focuses on tracking performance,
while IDF1 evaluates the degree of agreement at the
identification level of the tracking results.
Evaluating Homography Error for Accurate Multi-Camera Multi-Object Tracking of Dairy Cows
679

Table 1: Multi-camera individual tracking accuracy of the proposed method compared to the appearance feature-based
method. HE indicates the use of homography error for reliable bounding box selection.
Method
Free-stall barn Free-range barn
MOTA [%] ↑ IDF1 [%] ↑ MOTA [%] ↑ IDF1 [%] ↑
Appearance-Feature Based 27.5 19.7 51.5 26.5
Appearance-Feature Based + HE 61.8 27.0 51.1 26.5
(Aou et al., 2024) 81.2 51.0 95.2 66.9
Ours (Aou et al., 2024) + HE 86.1 66.7 95.3 69.8
Table 2: Comparison of tracking accuracy on videos divided into three segments. Even after splitting the data, the proposed
method consistently outperformed the other methods.
(a) Free-stall barn
Evaluation
period
(min)
MOTA [%] ↑ IDF1 [%] ↑
Feature Based (Aou et al., 2024) Feature Based (Aou et al., 2024)
+HE +HE +HE +HE
15:57-16:07 33.2 67.5 81.0 84.5 33.0 46.1 62.7 76.6
16:07-16:17 25.5 58.6 80.4 87.7 31.2 39.9 69.0 81.3
16:17-16:27 25.7 58.8 86.6 84.8 36.0 41.1 76.0 81.2
(b) Free-range barn
Evaluation
period
(min)
MOTA [%] ↑ IDF1 [%] ↑
Feature Based (Aou et al., 2024) Feature Based (Aou et al., 2024)
+HE +HE +HE +HE
05:30-05:40 79.8 79.9 98.7 98.9 65.7 66.6 92.5 97.2
05:40-05:50 54.1 53.3 96.0 95.4 33.6 33.6 78.8 79.7
05:50-06:00 43.9 41.0 92.9 92.9 39.2 37.6 97.0 97.0
4.3 Experimental Setting
Appearance Feature Extraction. We implemented
an appearance feature-based tracking system for inter-
camera individual association for a comparative ex-
periment. For appearance feature extraction, we used
ResNet152 pre-trained on ImageNet (Krizhevsky
et al., 2012) and fine-tuned for each dataset using
SoftTriple-Loss (Qian et al., 2019).
Homography Error (HE) Threshold. For the
free-stall barn, T
HE
= 0.5. For the free-range barn,
T
HE
= 1.0.
Camera Setting. The resolution of the video
used was 1,920 × 1,080 pixels, 1fps, and the viewing
angle was 124.3°.
5 RESULTS AND DISCUSSIONS
Effectiveness of Homography Error. To demon-
strate the effectiveness of homography error (HE), we
compare the accuracy of location-based (Aou et al.,
2024) and appearance-based tracking methods with
and without HE. As shown in Table 1, the tracking
accuracy improved for all methods with bounding box
selection and HE. Combining HE with a conventional
location-based method(Aou 2024) improved MOTA
and IDF1 by 4.9% and 15.7% on the free-stall dataset,
respectively. Figure 8 shows an example of success-
ful tracking. As shown in Figure 8, the proposed
method with HE succeeded in tracking (Figure 8b),
while the conventional method without HE failed due
to an ID switch(Figure 8a). This is because, without
HE, the same dairy cow in Cam5 are merged, caus-
ing greater bounding box misalignment in barn coor-
dinates. In contrast, using HE reduces the bounding
box misalignment, as unreliable bounding boxes are
Cam 5Cam 4
Barn Coordinates
(a) (Aou et al., 2024)
Cam 5Cam 4
Barn Coordinates
(b) Ours (Aou et al., 2024)+HE
Figure 8: Successful tracking examples when the homogra-
phy error is used for the free-stall barn dataset. Same color
indicates same individual. In our proposed method, the
dairy cow indicated by the arrows are continuously tracked.
excluded.
In addition, as shown in Table 1, HE was effec-
tive when combined with an appearance feature based
tracking method. MOTA and IDF1 were improved by
34.3% and 7.3% on the free-stall dataset, respectively.
When the homography error was not taken into ac-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
680
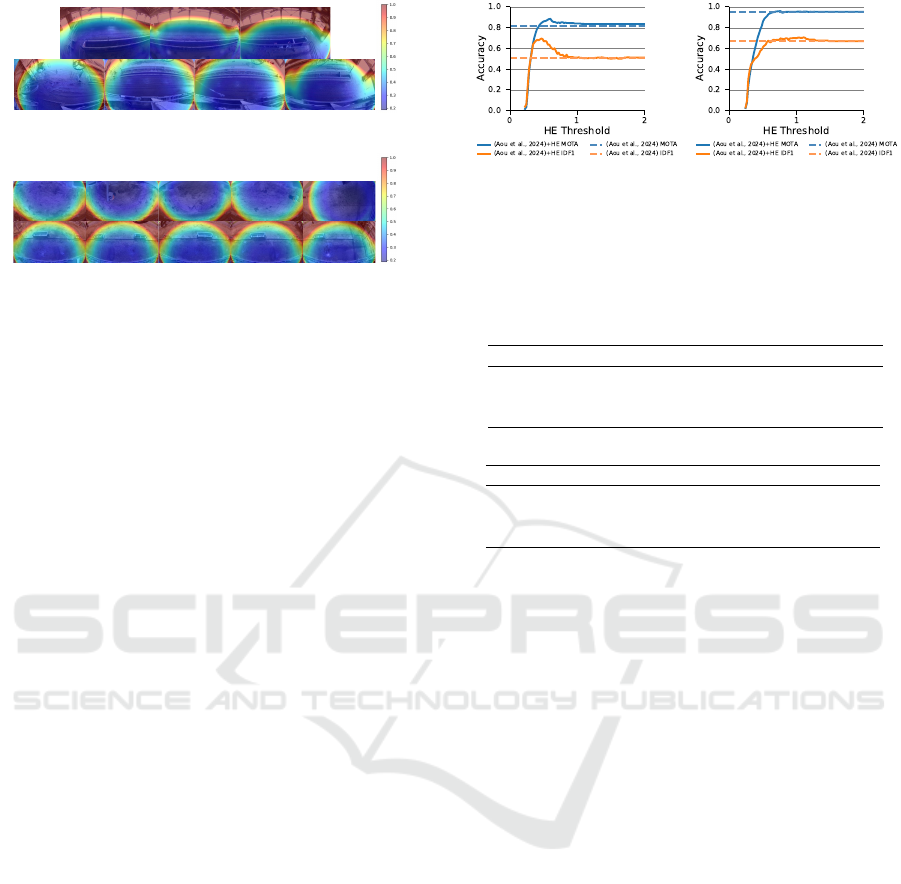
HE
(a) Free-stall barn
HE
(b) Free-range barn
Figure 9: Visualization of the homography error for each
camera, with colors representing the magnitude of the er-
ror. In the free-range barn, the homography error shows
less variation between cameras compared to the free-stall
barn. This is due to smaller differences in the installation
angles of the cameras.
count, there were many cases of integration failure
due to the large differences in size and orientation
of the dairy cows if the shared fields of view were
large, and there were many cases of integration fail-
ure. Excluding the bounding boxes with large homog-
raphy error reduced the difference in feature values
for the same cows between cameras, leading to im-
proved tracking accuracy.
To demonstrate the consistency of the proposed
method regardless of the input, we report the track-
ing accuracy for three video segments. We divided
the 30-minute tracking evaluation video into three 10-
minute segments. As shown in Table 2, the proposed
method with HE consistently achieved better results
than comparative methods for both datasets.
Robustness to Camera Installation Angles. As
shown in Table 1, the accuracy improvement was
greater for the free-stall dataset than the free-range
dataset. This is because, as shown in Figure 9, the
camera installation angles in the free-range dataset
were aligned, and the HE was small compared to
those in the free-stall dataset. These results indicate
that the proposed method is robust against changes in
camera installation angles.
As shown in Table 2b, the proposed method im-
proved tracking accuracy on the free-range dataset
during the first segment (05:30-05:40), when the dairy
cows were more active, compared to the second and
third segments (05:40-06:00), where their movement
was less pronounced. This result suggests that the
proposed method reduced the number of ID switches
caused when the cows moved across the cameras’
fields of view.
Tracking Accuracy for Varying HE Threhsold.
Figure 10 shows the tracking accuracy with various
HE thresholds (T
HE
) for the two datasets. The accu-
(a) Free-stall barn (b) Free-range barn
Figure 10: The relationship between the homography error
(HE) threshold and tracking accuracy.
Table 3: Tracking accuracy using homography error (HE)
compared with using angle of view (AoV). We compared
our proposed method utilizing HE with utilizing AoV.
(a) Free-stall barn
Method MOTA IDF1
(Aou et al., 2024) 81.2 51.0
(Aou et al., 2024) + HE 86.1 66.7
(Aou et al., 2024) + Angle of View 84.8 54.7
(b) Free-range barn
Method MOTA IDF1
(Aou et al., 2024) 95.2 66.9
(Aou et al., 2024) + HE 95.3 69.8
(Aou et al., 2024) + Angle of View 95.7 68.1
racy was the highest when the threshold was T
HE
=
0.5 for the free-stall dataset and T
HE
= 1.0 for the
free-range dataset. Increasing the HE threshold ex-
pands the excluded areas indicated by the brown and
yellow shading in Figure 9. if the threshold value
is set too low in either of the data sets, the track-
ing accuracy decreases as too many bounding boxes
are excluded. One of the limitations of our proposed
method is that it requires careful tuning of HE thresh-
old.
Homography Error vs. Angle of View. To
demonstrate the effectiveness of HE estimation, we
compared the tracking accuracy when reliable bound-
ing boxes were selected using HE (proposal) and
when they were simply narrowed by decreasing the
angle of view (AoV).
As shown in Table 3a, MOTA and IDF1 using HE
were 1.3% and 12.0% higher than those using AoV on
the free-stall dataset. While the AoV does not account
for the varying capture angles of the cameras, the ho-
mography error evaluates the error for each camera,
allowing for the establishment of exclusion areas spe-
cific to each camera. As shown in Table 3b, the accu-
racy improvement with the free-range dataset was rel-
atively small compared to the free-stall dataset; IDF1
using HE was 1.7% higher than AoV, while MOTA
was slightly lower. The reason is that for the free-
range dataset the shooting angles of cameras were
nearly top-down and aligned, as shown in Figure 9,
and thus, the effect of HE was relatively small.
Evaluating Homography Error for Accurate Multi-Camera Multi-Object Tracking of Dairy Cows
681

6 CONCLUSIONS
In this paper, we proposed a method for the multi-
camera tracking of dairy cows that utilizes the homog-
raphy error for selecting reliable bounding boxes. Ex-
periments on actual scenes showed that the proposed
method achieved high accuracy for two different barn
environments; even when the camera shooting an-
gles were unaligned, the tracking accuracy was im-
proved by appropriately selecting reliable bounding
boxes using the homography error. In addition, ex-
periments confirmed that evaluating homography er-
ror is effective for appearance-feature based tracking
methods, not just location-based methods.
Future work includes verifying our method can
handle different camera configurations and arrange-
ment.
ACKNOWLEDGEMENTS
The authors thank the members of Obihiro University
of Agriculture and Veterinary Medicine and Tsuchiya
Manufacturing Co. Ltd for helpful discussions and
for providing the video data of barn.
REFERENCES
Akizawa, K., Yamamoto, Y., and Taniguchi, Y. (2022).
Dairy cow tracking across multiple cameras with
shared field of views. Technical Report 299, The in-
stitute of image electronics engineers of Japan. (in
Japanese).
Aou, S., Yamamoto, Y., Nakamura, K., and Taniguchi, Y.
(2024). Multi-camera tracking of dairy cows using
rotated bounding boxes. In Proc. IWAIT.
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: the clear mot met-
rics. EURASIP journal on image and video process-
ing, 2008:1–10.
Bewley, A., Ge, Z., Ott, L., Ramos, F., , and Upcroft, B.
(2016). Simple online and realtime tracking. In Proc.
ICIP.
Bredereck, M., Jiang, X., K
¨
orner, M., and Denzler, J.
(2012). Data association for multi-object tracking-by-
detection in multi-camera networks. In 2012 Sixth In-
ternational Conference on Distributed Smart Cameras
(ICDSC), pages 1–6.
Derek, G., Zach
´
ar, G., Wang, Y., Ji, J., Nice, M., Bunting,
M., and Barbour, W. W. (2024). So you think you can
track? In Proc. WACV.
Eshel, R. and Moses, Y. (2008). Homography based multi-
ple camera detection and tracking of people in a dense
crowd. In 2008 IEEE Conference on Computer Vision
and Pattern Recognition, pages 1–8.
Fleuret, F., Berclaz, J., Lengagne, R., and Fua, P. (2008).
Multicamera people tracking with a probabilistic oc-
cupancy map. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 30(2):267–282.
Hu, K. (2020). YOLOV5 for oriented object detection.
https://github.com/hukaixuan19970627/yolov5
obb.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. Advances in neural information processing
systems, 25.
Mar, C. C., Zin, T. T., Tin, P., Honkawa, K., Kobayashi,
I., and Horii, Y. (2023). Cow detection and tracking
system utilizing multi-feature tracking algorithm. Sci-
entific reports, 13(17423).
Qian, Q., Shang, L., Sun, B., Hu, J., Li, H., and Jin, R.
(2019). Softtriple loss: Deep metric learning with-
out triplet sampling. In Proceedings of the IEEE/CVF
international conference on computer vision, pages
6450–6458.
Ristani, E., Solera, F., Zou, R., Cucchiara, R., and Tomasi,
C. (2016). Performance measures and a data set for
multi-target, multi-camera tracking. In Proc. ECCV,
pages 17–35. Springer.
Ristani, E. and Tomasi, C. (2018). Features for multi-target
multi-camera tracking and re-identification. In Proc.
CVPR, pages 6036–6046.
Shirke, A., Saifuddin, A., Luthra, A., Li, J., Williams, T.,
Hu, X., Kotnana, A., Kocabalkanli, O., Ahuja, N.,
Green-Miller, A., Condotta, I., Dilger, R. N., and
Caesar, M. (2021). Tracking grow-finish pigs across
large pens using multiple cameras. arXiv preprint
arXiv:2111.10971.
Ultralytics (2024). Oriented Bounding Boxes Object Detec-
tion. https://docs.ultralytics.com/ja/tasks/obb/.
Yamamoto, Y., Akizawa, K., Aou, S., and Taniguchi, Y.
(2024). Entire-barn dairy cow tracking framework for
multi-camera systems. Computers and Electronics in
Agriculture, 229.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. IEEE transactions on pattern analysis and
machine intelligence, 22(11):1330–1334.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
682
