Game State and Spatio-Temporal Action Detection in Soccer Using
Graph Neural Networks and 3D Convolutional Networks
J
´
er
´
emie Ochin
1, 2 a
, Guillaume Devineau
2 b
, Bogdan Stanciulescu
1
and Sotiris Manitsaris
1
1
Centre for Robotics, MINES Paris - PSL, France
2
Footovision, France
Keywords:
Spatio-Temporal Action Detection, Video Action Recognition, Sport Video Understanding, 3D
Convolutional Neural Networks, Graph Neural Networks, Soccer, Game Structure, Sports Analytics,
Soccer Analytics.
Abstract:
Soccer analytics rely on two data sources: the player positions on the pitch and the sequences of events they
perform. With around 2000 ball events per game, their precise and exhaustive annotation based on a monocular
video stream remains a tedious and costly manual task. While state-of-the-art spatio-temporal action detection
methods show promise for automating this task, they lack contextual understanding of the game. Assuming
professional players’ behaviors are interdependent, we hypothesize that incorporating surrounding players’
information such as positions, velocity and team membership can enhance purely visual predictions. We
propose a spatio-temporal action detection approach that combines visual and game state information via
Graph Neural Networks trained end-to-end with state-of-the-art 3D CNNs, demonstrating improved metrics
through game state integration.
1 INTRODUCTION
Sports Analytics, the practice of collecting and inter-
preting data from past performances to inform future
decisions, was pioneered in soccer by Royal Air Force
Wing Commander Charles Reep, who meticulously
analyzed over 600,000 passing moves beginning in
the 1950s (Mandadapu, 2024). Since then, the de-
mand for such statistics has experienced a strong de-
velopment with the increased ability to collect, pro-
cess, store, and analyze large quantities of data, us-
ing, among other things, cameras, GPS, computers,
and algorithms (Jha et al., 2022). However, if re-
cent advances in deep learning have facilitated the au-
tomation of player tracking and pitch location from
monocular videos - a convenient alternative to the
wearable -, the task of precise event annotation from
soccer videos is still performed manually by trained
operators (Cartas et al., 2022).
Indeed, sport video understanding remains a
highly challenging domain that encompasses a wide
variety of tasks and applications. This article specif-
a
https://orcid.org/0009-0008-3909-3757
b
https://orcid.org/0009-0008-5202-0747
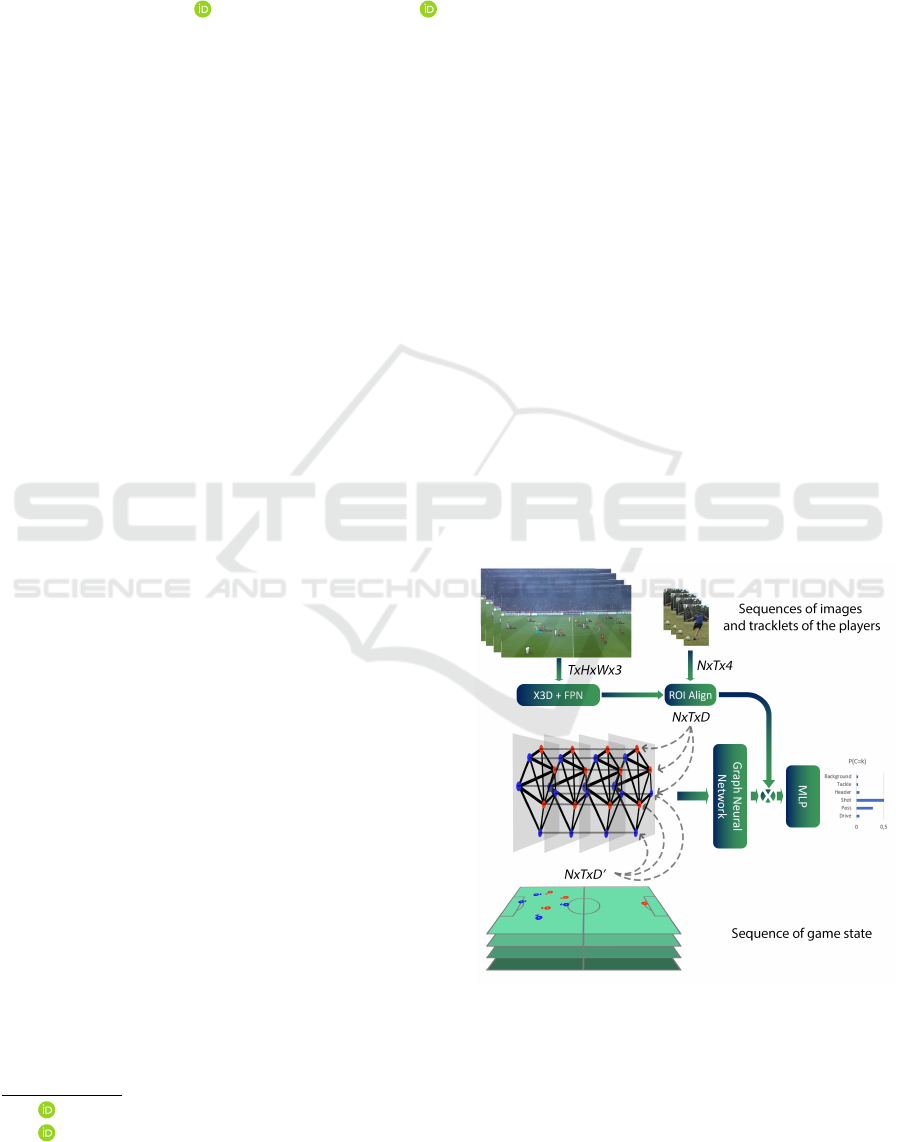
Figure 1: Spatio-temporal Action Detection in soccer, using
a Graph Neural Network to encode Local Game State and a
Track-Aware Action Detector (Singh et al., 2023) to extract
relevant visual features. Our method demonstrates the com-
plementarity of game state information and visual features
and leads to improved performances.
636
Ochin, J., Devineau, G., Stanciulescu, B. and Manitsaris, S.
Game State and Spatio-Temporal Action Detection in Soccer Using Graph Neural Networks and 3D Convolutional Networks.
DOI: 10.5220/0013161100003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 636-646
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

ically addresses the spatio-temporal localization of
events in soccer games. The goal is to accurately
identify, in untrimmed videos, when an action occurs,
what the action is, and who performed it, or where it
took place since an action instance is defined as a set
of linked bounding boxes over time, called action tube
or tubelet, that contains the player performing the ac-
tion. Solving this problem is essential for generating
reliable and actionable statistics that can inform tac-
tical decisions and allow opponent analysis or perfor-
mance evaluations in professional soccer.
Current methods of spatio-temporal action detec-
tion are not designed to explicitly capture the complex
relationships that can be observed in soccer gameplay.
Soccer is a highly interactive sport, where player ac-
tions are decided based on the positions, movements
of both teammates, opponents and their collective
strategy. Existing methods, which rely on the aggre-
gation of local visual features along the path of the
players in screen space, lack the ability to fully com-
prehend these contextual relationships.
Jointly inspired by prior works in spatio-temporal
action detection, group activity recognition and
graph-based methods for soccer action spotting, our
work proposes to enhance a track-aware spatio-
temporal event detection method (TAAD) (Singh
et al., 2023) by incorporating, for each player that
is observed, contextual information about the local
game state, through a learnt node embedding that is
produced by a Graph Neural Network (GNN) (see
Figure 1). We hypothesize that adding this infor-
mation about the surrounding players, such as their
positions and velocities on the pitch, team member-
ship and appearance, structured by a GNN, can im-
prove the performance of pure ”visual” event detec-
tion models.
It is worth noting that using TAAD alongside
game state information aligns naturally with soccer
analytics, where tracking, identification, and posi-
tion estimation are prerequisites for event annotation.
Since tracklets and game state details are typically
available before event annotation begins, it is natural
to leverage them to enhance event detection.
We test our hypothesis by developing a new
spatio-temporal action detection dataset dedicated to
soccer, and by using a GNN trained end-to-end along-
side a state-of-the-art 3D convolutional neural net-
work (CNN), implementing a TAAD architecture.
Given the applied nature of this research and the goal
of enabling concrete applications, we aim to limit
computational costs by ensuring that this implemen-
tation is trainable on a single entry-level professional
GPU, such as an RTX A6000.
Our results demonstrate that explicitly incorporat-
ing structured game state information improves the
performance of action detection models.
2 RELATED WORK
2.1 Spatio-Temporal Action Detection
In the field of video understanding, spatio-temporal
action detection is the task of detecting intervals of
possibly multiple and concurrent human actions in
untrimmed videos. State-of-the-art methods are deep
learning based and most of the work in this field ad-
dresses several core challenges:
• identify the actors,
• optionally model the relationship between them or
with contextual elements,
• generate relevant features from the frames or
video,
• sample and aggregate these features in a relevant
manner,
• produce the frame-by-frame or clip-level action
predictions,
• temporally link these predictions to obtain an ac-
tion tube.
These methods are divided into two main cate-
gories: frame-level methods and clip-level methods.
Frame-Level Methods: the predictions are made
frame by frame and then linked together to form ac-
tion tubes. Conceptually, most of these methods rely
on a region proposal network and ROI Pooling or ROI
Align layers (He et al., 2017) to (i) detect the actors
and (ii) locally sample and pool the features that are
produced by a CNN. Early methods used 2D CNNs
and optical flow for motion cues (Weinzaepfel et al.,
2015; Saha et al., 2016; Singh et al., 2017), later tran-
sitioning to 3D CNNs for enhanced feature extraction
(Gu et al., 2018; Girdhar et al., 2018). Expanding
on this line of work, Track-Aware Action Detector
(TAAD) first detects and tracks actors, using modern
object detectors and tracking algorithms - which later
facilitates the linking of predictions -, then aggregates
features along the path for robustness to camera mo-
tion (Singh et al., 2023). Finally, some approaches
integrate actor localization and action prediction, re-
sembling YOLO’s object detection approach (Red-
mon, 2016; Chen et al., 2021; K
¨
op
¨
ukl
¨
u et al., 2019).
Per-frame detections are linked using methods
like dynamic programming with cost functions based
on detection scores and overlaps (Saha et al., 2016;
Singh et al., 2017; Kalogeiton et al., 2017) or
tracking-by-detection (Weinzaepfel et al., 2015).
Game State and Spatio-Temporal Action Detection in Soccer Using Graph Neural Networks and 3D Convolutional Networks
637

Clip-Level Methods: these methods predict
tubelets, sequences of bounding boxes that tightly
bind the actions of interest. The Action Tubelet De-
tector (ACT-detector) uses 2D CNNs to stack per-
frame features for regressing the offset and dimen-
sions of a cuboid anchor and predict the action class
(Kalogeiton et al., 2017). Similarly, another ap-
proach estimates action centers and build cuboid an-
chors around them (Li et al., 2020). More recently, a
Transformer-based method ”encodes” video data us-
ing self-attention layers and ”decodes” tubelets lo-
cations, classes, and scores using learned ”tubelet
queries” and cross-attention layers (Zhao et al., 2022).
Visual Relationship Modeling: the interaction
between actors, objects, and their environment pro-
vide valuable context for improving detection and
classification in videos. Several approaches have been
proposed to model these relationships, such as atten-
tion mechanisms or GNNs.
Attention-based, the Actor Transformer Network
(Girdhar et al., 2019) employs a region proposal net-
work to sample features from a 3D CNN, creating ac-
tor representations. Then, the attention mechanism
attend to all other spatio-temporal features extracted
from the video, adding contextual information. Al-
ternatively, attention can focus solely on actor tokens
and a fixed-size environment representation obtained
via average pooling of the feature map (Vo-Ho et al.,
2021).
GNNs are also popular for modeling relationships,
passing information between nodes representing en-
tities and their relationships. Often, these methods
first detect and track actors, sample features from 3D
CNNs, and use these as node features, while edges
connect actors, objects, or temporal sequences (Zhang
et al., 2019; Tomei et al., 2021). Action predictions
can occur on edges using embeddings of interacting
entities or at the node level with entity-specific em-
beddings.
Datasets: most of the works described above
were benchmarked on the UCF101-24 (Soomro et al.,
2012) or AVA (Gu et al., 2018) datasets. They con-
tain material that is substantially different from sports
videos, where fast camera motions can happen, ac-
tors appear small on screen, with motion blur and, in
team sports, with fluctuating visibility. Therefore, to
foster the development of methods adapted to these
characteristics, a dedicated multi-person video dataset
of spatio-temporally localized sports actions was cre-
ated: MultiSports (Li et al., 2021). It contains 3200
video clips collected from 4 sports (basketball, vol-
leyball, soccer and aerobics gymnastics) and provides
action tubelets annotations for these videos.
2.2 Group Activity Recognition in
Sports
Group activity recognition consists in reasoning si-
multaneously over multiple actors in order to pre-
dict their individual and group activities. Some of
the methods draw inspiration from visual relationship
modeling, presented above. We will present only a
few methods that tackle individual and group activity
recognition in Volleyball.
In the early work Social Scene Understanding
(Bagautdinov et al., 2017), a 2D CNN backbone is
shared for player detection and activity recognition.
A first stream produces candidate players detections,
filtered using a Markov Random Field. Then, play-
ers features are sampled to produce fixed-size vector
representations per frame. These are fed into an Re-
current Neural Network (RNN), whose hidden states
enable individual action predictions frame-by-frame,
while max pooling these states across players yields
group activity predictions. Similarly, the Convolu-
tional Relational Machine (Azar et al., 2019) uses 2D
or 3D CNN features to generate ”activity maps”—
heatmaps indicating the likelihood of individual and
group actions per class. Both approaches rely on the
wide receptive field of CNNs for multi-agent reason-
ing, though this may lack the structural expressive-
ness offered by attention mechanisms or graphs.
Proposed more recently, the Actor-Transformer
for Group Activity Recognition (Gavrilyuk et al.,
2020) integrates RGB, Optical Flow, and Pose modal-
ities. Players are ”tokenized” via embedding features
(using ROI Align) or pose coordinates, which serve
as inputs to a Transformer encoder for individual and
group action predictions. The centers of the bounding
boxes in screen space are used as positional encoding
of the players.
While both Visual Relationships Modeling meth-
ods and Group Activity Recognition methods effec-
tively model relationships between entities within an
image or video, they differ from approaches that
leverage game state information, such as player po-
sitions, velocities, team membership and other con-
textual data, that are better suited to understand the
complex contextual relationships that drive gameplay.
2.3 Graph Neural Networks in Sports
GNNs are ubiquitous. Their ability to model interac-
tions within structured data has made them good can-
didates to model inter-agent patterns in a number of
multi-agents problems. This section highlights meth-
ods applied to sports, particularly soccer, that use tab-
ular player data (the ”game state”) as node representa-
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
638

tions rather than visual features, aiming to learn new
discriminative features that could complement the vi-
sual ones.
In (Everett et al., 2023), a combination of GNN
and LSTM is used to impute football players’ loca-
tions at all time steps from sparse event data (e.g.,
shots, passes). Similarly, (Ding and Huang, 2020)
employs a graph-attention network and dilated causal
convolutions to predict trajectories of coordinated
agents, such as basketball and football players. These
studies highlight the strong link between players’ spa-
tial configurations and actions, as well as the ability of
GNNs to deliver robust structured predictions.
Lastly, in (Cartas et al., 2022), a method for tem-
poral event detection in football leverages player po-
sitions, velocities, and team identities (team 1, team
2, goalkeepers, referees). A GNN with edge convolu-
tions and graph pooling encodes player configurations
into single vectors for each time step, which are then
used for action detection. Building on this approach,
we propose a spatio-temporal action detection method
that removes the graph pooling step to enable node-
based predictions (per player predictions).
2.4 Vision-Language Models
Vision-Language Models (VLMs) integrate large lan-
guage models with computer vision capabilities, en-
abling them to understand and generate text based
on visual inputs. Recent notable examples include
Molmo, Pixtral, LLaVa and Qwen2-VL (Deitke et al.,
2024; Agrawal et al., 2024; Liu et al., 2024; Wang
et al., 2024). However, VLMs are not yet mature
enough for soccer video analysis because they rely
heavily on proprietary models and synthetic data, lack
specialized training datasets tailored to soccer, strug-
gle to interpret complex player interactions and tac-
tics, and tend to hallucinate - a critical flaw in the
sensitive domain of sports analysis where accuracy is
paramount.
3 METHODOLOGY
3.1 Dataset
The MultiSports dataset is a reference benchmark for
multi-person spatio-temporal action detection meth-
ods in sports, but it is missing important features for
this work: it lacks detection and tracking data of all
the players as well as camera calibration models in or-
der to estimate the positions of the players on the field.
These are required features to study if game state
information can help enhancing pure visual spatio-
temporal event detection methods. In order to rem-
edy these issues, we created a specific ”ball events”
dataset that matches these requirements (see Figure
2). The Footovision dataset characteristics are:
• 20000 videos of at least 75 frames (3 seconds).
• 997 different football games from all over the
world.
• 2500 samples per class minimum.
• 8 classes of action: ball-drive, pass, cross, header,
throw-in, shot, tackle and ball-block
Sequences are sampled around randomly selected
events from 997 games, ensuring no overlap between
clips to create distinct training and validation sets.
Some classes exceed 2,500 instances due to the high
likelihood of certain events preceding or following
others in a short period of time (e.g., ball-drives of-
ten lead to passes, crosses, or shots and are therefore
present when a pass, cross or shot is sampled). This
introduces a slight class imbalance.
The data used to make the annotations was col-
lected from TV broadcast videos by the company
Footovision, using in-house annotation software and
team of professional annotators. Multiple manual
quality controls are performed on tracking and iden-
tification data, line detection and camera calibration,
and events are manually annotated with an estimated
average precision of a few frames around the ”ball
touch”. Ball-drives are annotated from the first ball
touch to the next action (pass, cross, shot, tackle). All
other events are annotated in a window of 7 frames
around the ball touch. These annotations contain,
frame by frame, for each video clip:
• the bounding box of the players and referees, with
a tracklet ID to match bounding boxes across the
clip (for the avoidance of doubt : this dataset does
not contain the ball position),
• the team membership of the players (team 1 or 2),
• their shirt number,
• the class of the action performed by the player,
including a background class when the players do
not perform any action,
• their position and velocity in the pitch reference
frame.
The videos in this dataset are subject to copyright
protection and cannot be shared publicly.
Game State and Spatio-Temporal Action Detection in Soccer Using Graph Neural Networks and 3D Convolutional Networks
639
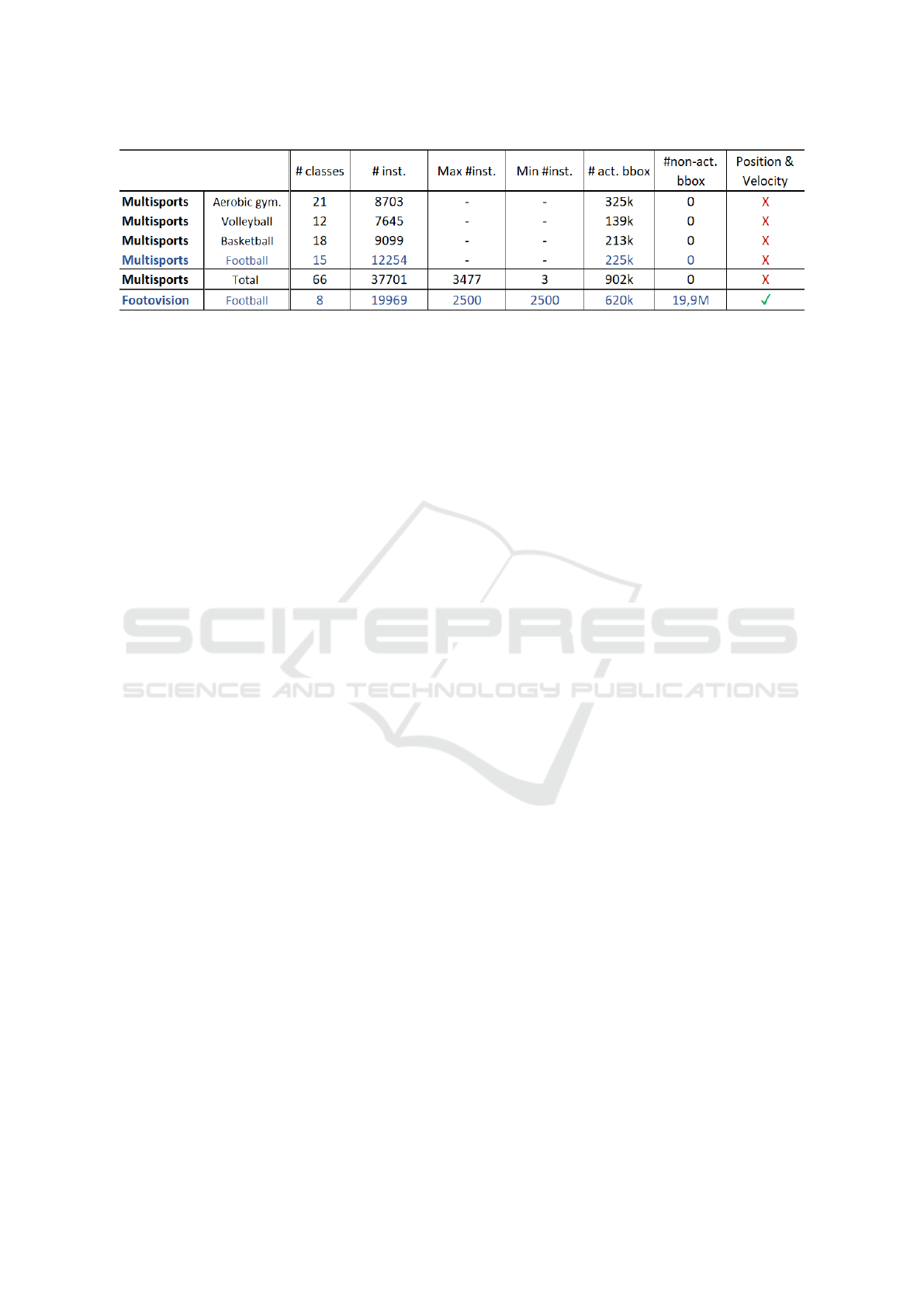
Figure 2: Comparison of the characteristics of the MultiSports and Footovision datasets.
3.2 Visual Feature Extraction
3.2.1 Selection of a Baseline Method
We selected the Track-Aware Action Detector
(TAAD) (Singh et al., 2023) as our baseline due to
its suitability for sports with significant camera mo-
tion. TAAD tracks players and aggregates features
from a state-of-the-art 3D CNN along the track using
ROI Align (He et al., 2017), followed by a Tempo-
ral Convolutional Network (TCN) for per-frame ac-
tion predictions. It performs well on the MultiSports
dataset and aligns with this work, as player tracking
is already completed before event annotation. We aim
to compare TAAD with a hybrid approach combining
visual features and local game state features learned
by a GNN.
3.2.2 Players Visual Feature Extraction
The original TAAD implementation uses a SlowFast
backbone (Feichtenhofer et al., 2019), a state-of-the-
art CNN for video understanding. Nevertheless, re-
cent works (Martin, 2020; Hong et al., 2022; Cioppa
et al., 2024) demonstrate that lightweight architec-
tures are particularly well-suited for small datasets
of sports action recognition and tend to delay over-
fitting. For our implementation, we selected the X3D
backbone family, which delivers performance compa-
rable to SlowFast while using a fraction of the param-
eters. For instance, X3D-M achieves 76% top-1 ac-
curacy with just 3.8M parameters, compared to Slow-
Fast 4×16 R50, which achieves 75.6% top-1 accuracy
with 34.4M parameters on the Kinetics-400 dataset
(Feichtenhofer, 2020). This substitution reduces com-
putational costs for subsequent end-to-end training as
we plan to extend these architectures by using a GNN.
We utilize the first five blocks of the X3D back-
bone and integrate a Feature Pyramid Network (FPN)
with the last three blocks, following (Lin et al., 2017;
Singh et al., 2023). Player features are extracted us-
ing ROI Align based on their tracklet data, maintain-
ing the feature dimension (D=192) from X3D’s fifth
block. Additionally, this backbone preserves the tem-
poral resolution, ensuring that a clip of T frames pro-
duces a feature tensor with a temporal dimension of
T.
After applying TAAD to our clip of T frames,
with N players, we obtain a feature tensor Φ
X3D
∈
R
NxT x192
, and we note Φ
(i,t)
X3D
the visual feature vector
of the player i and time t:
Φ
(i,t)
X3D
= ROI(X3D(sequence), bbox
(i,t)
) (1)
Where ROI is the ROI Align sampling operation,
X3D the application of the backbone on the sequence
of images and bbox
(i,t)
is the bounding box of player
i at time t.
3.2.3 Trade-off Between Image Size, Length and
Frame-Rate
Down-sampling the video resolution to 640x352 pix-
els provides a good balance for TAAD, as further
reduction degrade performance, especially on wide
fields of view where players appear small. No tempo-
ral sub-sampling was applied, as most player actions
in the dataset are fine-grained and occur almost ”in-
stantly” (Hong et al., 2022). The 25 FPS rate aligns
with the average event frequency (1 event every 65
frames) and accommodates the variability in event in-
tervals: a ball drive can last for more than 10 seconds
while a sequence of events such as shot and ball block
can happen in a window of 10 frames or less. The clip
length of 50 frames was chosen based on these reso-
lutions and the available computational budget.
3.3 Local Game State Encoding
3.3.1 Game State Information
Our approach hypothesizes that incorporating struc-
tured information about players’ configuration on the
pitch, referred to as the game state, complements
purely visual methods like TAAD. In professional
soccer, players’ actions, locations and velocities are
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
640

closely linked to the behavior of others, team mem-
bership, and collective strategies. Since inter-class
variations in fine-grained action recognition are often
subtle, modeling these player relationships can aid in
learning additional discriminative features.
Moreover, we argue that using 2D positions and
velocities on the pitch is a natural choice to model
these inter-agents relations in a sport such as soccer.
In contrast, methods for visual relationship modeling
and group activity recognition rely on attention mech-
anisms that focus on visual features, lacking informa-
tion about the spatial arrangement of the actors, or in-
corporating it only through screen space coordinates
when using positional encoding. All the works that
aim to model the game itself - estimate the probabil-
ity of passes, next actions, detection of tactical pat-
terns, trajectory forecasting... - are based on this very
synthetic representation of the game state (Brefeld
et al., 2019; Fadel et al., 2023; Martens et al., 2021;
Rudolph and Brefeld, 2022; Dick et al., 2022; Anzer
et al., 2022). In this paper, we adopt a hybrid ap-
proach, using both visual features and game state in-
formation:
We will call x
i
t
the feature vector of player i at time
t, obtained by concatenating:
• its normalized position (p
(i,t)
x
, p
(i,t)
y
) at time t,
• its normalized velocity (v
(i,t)
x
, v
(i,t)
y
) at time t,
• its team membership, either 0 or 1,
• a projection of its visual feature vector Φ
(i,t)
X3D
in a
space of lower dimension (D’=64), noted ϕ
(i,t)
X3D
.
x
i
t
=
p
(i,t)
x
, p
(i,t)
y
, v
(i,t)
x
, v
(i,t)
y
, 0|1, ϕ
(i,t)
X3D
(2)
3.3.2 Graph of the Game
To be able to learn a node embedding meaningful for
our problem, we build a spatio-temporal graph of the
game G = (V , E) following these steps :
• We create a node for each player at each time-step
V =
x
i
t
, i ∈ [1, 22], t ∈ [1, T ]
• We create temporal edges between nodes of the
same player at neighboring time-steps
• We create edges between nodes of different play-
ers at a given time-step using simple rules, such
as the M closest players or using distance-based
thresholds. In this implementation, we used the 6
closest players.
3.3.3 Edge Convolutions
A GNN can be described as a process by which the
information contained in a graph evolves using func-
tions approximated by neural networks. More pre-
cisely, it is the process by which the information con-
tained in a node of that graph is modified by the infor-
mation contained in the nodes of its neighborhood:
vector messages are exchanged between connected
nodes and updated using neural networks. This defin-
ing feature of GNN is called neural message passing.
In a GNN, layers of message passing are per-
formed, and at each iteration k, the hidden embedding
h
(k)
u
of a node u ∈ V is updated according to informa-
tion aggregated from u’s graph neighborhood N (u).
Among the large variety of message passing meth-
ods, we chose Edge Convolutions with an asymmet-
ric edge function to implement our GNN (Wang et al.,
2019). Its update method can be summarized by equa-
tion 3:
h
(k+1)
u
= MAX
MLP
h
(k)
u
h
(k)
v
− h
(k)
u
(3)
Where MLP is a shallow Multi-layer Perceptron
and MAX a channel-wise max pooling operation.
This choice is driven by our will to build a node
embedding that explicitly combines global informa-
tion about the node, captured by h
(k)
u
, with rela-
tive and local neighborhood information, captured by
h
(k)
v
− h
(k)
u
. This is the reason why we call this node
embedding the ”local game state encoding”.
Its benefit is particularly salient on the first layer
of convolution (k=0) where h
0
u
= x
u
t
: the edge convo-
lution starts learning an embedding based on the ab-
solute position and velocity information of the node,
as well as the relative position and speed of its neigh-
bors, or their team membership and variation of ap-
pearance. This is quite relevant given our hypothesis
of high inter-dependency of motions between agents
in football. Then, layer by layer, the network progres-
sively learn a more abstract and more discriminative
node embedding, simply guided by the loss function
during training.
We only use a few layers of edge convolutions: in
practice 3 or 4, to avoid the ”over-smoothing” effect
of the nodes.
3.4 Final Prediction
Finally, we concatenate Φ
X3D
∈ R
NxT xD
with the ten-
sor of nodes features obtained after application of the
last layer K of graph edge convolution h
(K)
∈ R
NxT xD
′
,
apply the temporal convolution network of the TAAD
Game State and Spatio-Temporal Action Detection in Soccer Using Graph Neural Networks and 3D Convolutional Networks
641
and produce a dense tensor of predictions using a us-
ing a Multi-layer Perceptron (MLP). We train our net-
work in a supervised manner using a cross entropy
loss function (CE-Loss).
3.5 Action Tube Construction
An event is defined by its list of characteristics: (start
frame, end frame, class, score). Both TAAD and our
method output dense predictions (class prediction per
frame and per player), that can contain spurious de-
tections on a few frames in the middle of a sequence
of the same label.
Therefore, in order to transform this sequence
into an action-tube we filter it by performing a la-
bel smoothing optimization (Saha et al., 2016; Singh
et al., 2017; Kalogeiton et al., 2017). Only then the
sequence of events is extracted and matched with the
ground truth labels to calculate our metrics. A pre-
dicted event is added to the list of events when its class
is not background.
3.6 Implementation Details
We used 50 frames as input with no sub-sampling
(2 seconds of video clip). We used the X3D S pre-
trained backbone as feature extractor and the PyTorch
Geometric framework was used for the Edge Convo-
lutions layers. We used the Adam optimizer (Kingma
and Ba, 2015), with a learning rate of 0.0005, a weight
decay of 1e-05 on the non-bias parameters, a gradi-
ent accumulation over 20 iterations before weight up-
date and a batch size of 6 on a RTX A6000 GPU. We
trained the system end-to-end for a total of 13 epochs
and divided the learning rate by 10 at epoch 10.
4 EVALUATION
4.1 Metrics
We have chosen to report the mean Average Precision
as our main metric. Is is common in object detec-
tion and video action detection works (Weinzaepfel
et al., 2015; Kalogeiton et al., 2017). A detection is
correct when its Intersection-Over-Union (IoU) with a
ground truth action tube is larger than a given thresh-
old (e.g. 0.5 or 0.2) and the predicted label matches
the ground truth one. Then, Average Precision is com-
puted for each class, using the 11 points method as
proposed by (Everingham et al., 2010), and the mean
is computed across classes. The particularity of our
setup is that the tracking of the players is already
done: therefore, the IoU is purely temporal.
In more details, the matching between predicted
and ground truth events is performed as follows: the
temporal IoU is calculated for all event pairs to iden-
tify the best match, regardless of class. If the high-
est IoU exceeds the threshold, the events are matched
and removed from their lists. Matches with identical
classes are True Positives. Unmatched true events (he
has not been detected) are paired with ”dummy” pre-
dicted events of the background class, and unmatched
predicted events are paired with ”dummy” true events
of the background class.
4.2 Comparisons
We implemented TAAD and TAAD + GNN as de-
scribed in the Methdology section.
Firstly, we observe that metrics at 0.2 IoU thresh-
old obtained when running our implementation of
TAAD on the Footovision dataset are close to the
metrics reported by the authors on their implemen-
tation of TAAD on the MultiSports dataset. Though
these results cannot be compared directly (there can
be slight domain gaps, the backbones are not identi-
cal, etc.), this shows that this method translates well
to this new dataset, even with a lighter backbone:
• 60.6% mAP@0.2 and 37% mAP@0.5 on Multi-
Sports
• 59.58% mAP@0.2 and 46.4% mAP@0.5 on the
Footovision dataset
The gap observed on the mAP at a 0.5 threshold
of IoU could be explained by the fact that our dataset
is less challenging than MultiSports: less classes, less
class imbalance, more samples per class on the mi-
nority classes.
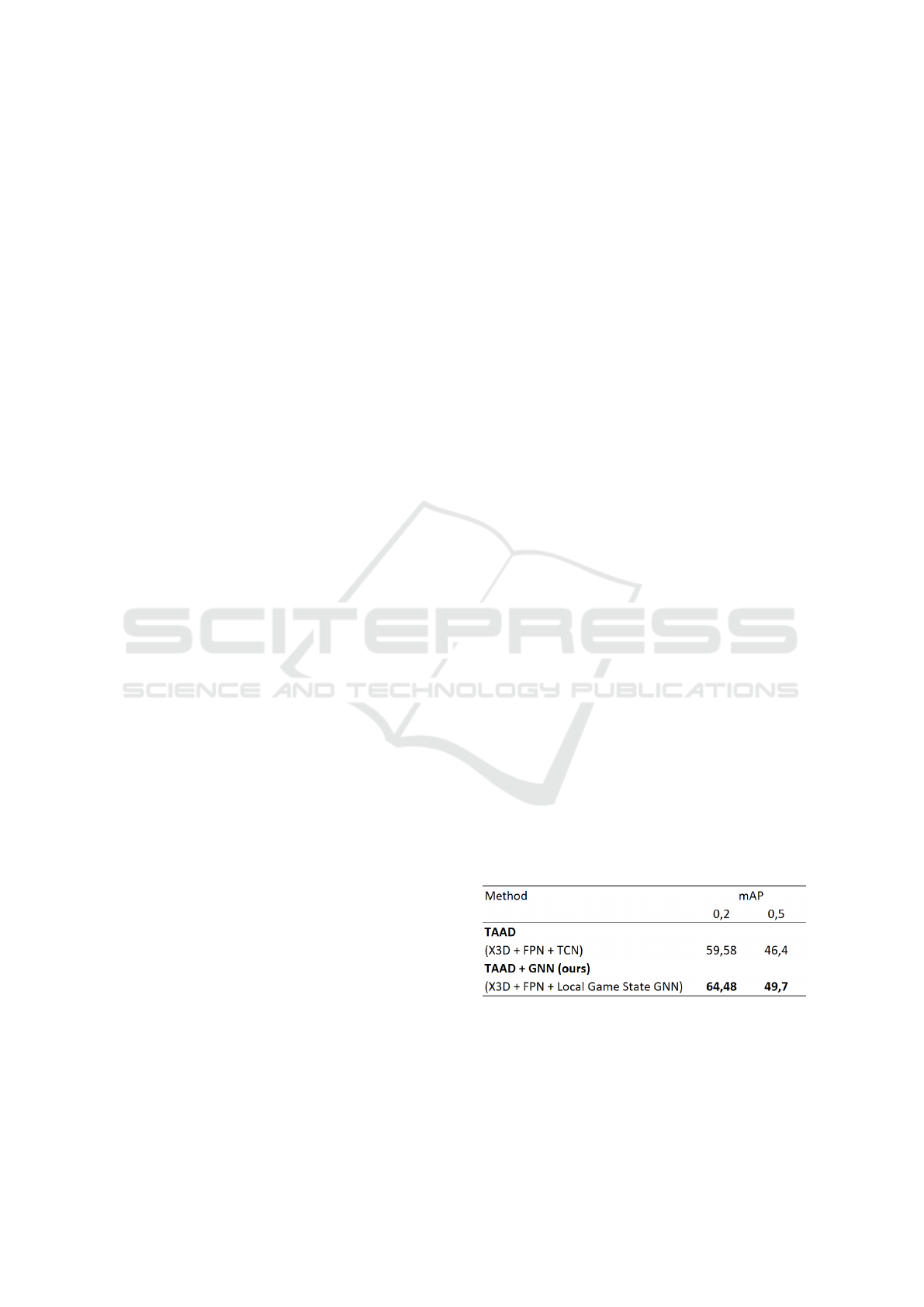
Secondly, Figure 3 and Figure 4 show the higher
performance of TAAD + GNN compared to TAAD
alone. This demonstrates that integrating structured
game state information into the detection process
leads to improvements in detections.
Figure 3: Comparison of TAAD and our method TAAD +
GNN: integrating structured game state information into the
detection process leads to improvements in performances.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
642
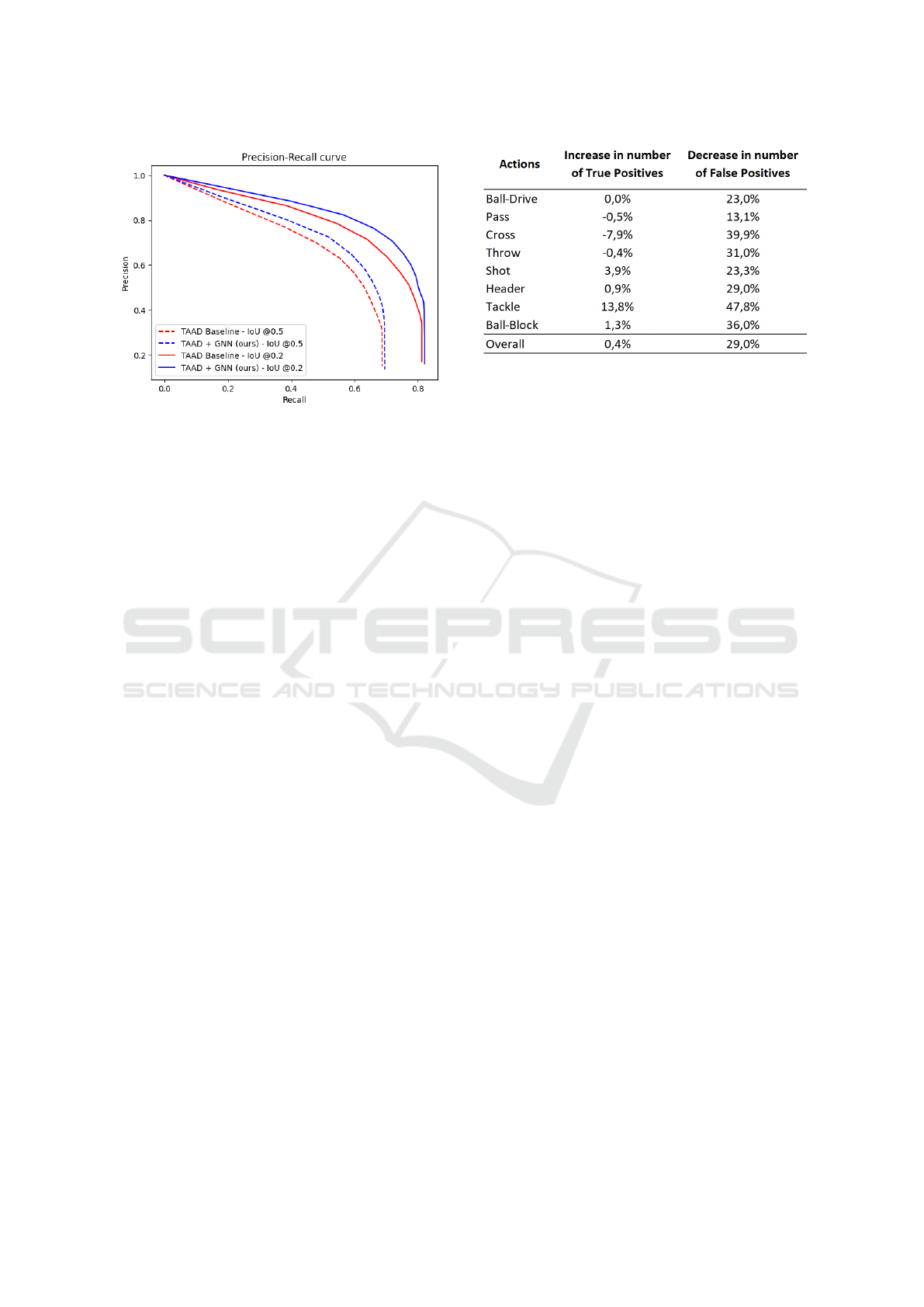
Figure 4: Comparison of the Precision - Recall curves for
the TAAD and TAAD + GNN, with various IoU thresholds
(0.2 and 0.5).
4.3 Discussion
4.3.1 High Recall and Low Precision Regime
In order to meet the expectation of exhaustiveness of
events detection in the context of data analytics, it is
envisaged to work in a regime of high recall - low pre-
cision, using predictions with low confidence scores.
Though this setting unavoidably leads to the detection
of numerous False Positives, their subsequent filtering
by human intervention remains far more competitive
compared to the alternative: seeking missing informa-
tion by ”scrubbing” a video.
We assess the interest of our method in this con-
text of high recall - low precision by studying the vari-
ations in the number of True Positives and False Pos-
itives when switching from TAAD to TAAD + GNN.
For that purpose, we fixed the IoU threshold at 0.2
and the confidence score threshold at 0.5 (for an over-
all recall reaching ∼ 80%).
The results are reported in Figure 5 and allow us
to confirm the benefit of our method in this context:
making more structured predictions by using game
state information reduces the number of false posi-
tives by almost 30%, while keeping the overall num-
ber of True Positives constant.
4.3.2 Detailed Variations of Performances
A more detailed analysis of the results shows that de-
spite an overall improvement in the metrics, the situ-
ation is quite contrasted on a per class level.
Indeed, analyzing the class level results reported
in Figure 5, we observe an important erosion of detec-
tion for the class ”Cross” (almost -8%). It is partly ex-
plained by the higher confusion between ”Cross” ac-
Figure 5: When working in high recall - low precision
regime, our method significantly reduce the number of False
Positive detections.
tions and ”Shot” actions when switching from TAAD
to TAAD + GNN, while, surprisingly, less ”Shots”
are confused with ”Crosses” (see the confusion ma-
trices in Figure 6). These two classes can be easily
confused: the players performing both actions are in
the same zones of the pitch and both shoot the ball
toward the goalmouth, except that in the first case the
player intend to pass the ball to a player that is closer
to the goalmouth, while in the second case he intends
to score directly. It is also sometimes difficult to know
what was the intention of the player when he misses
one of those actions.
”Cross” is also the class that experience the sec-
ond most important decrease in its number of False
Positives. Therefore, a shift in the equilibrium recall-
precision for the current confidence score threshold
(0.5), between the two methods, could be an another
factor of explanation.
Finally, the ”Tackle class” experiences the most
important improvement in both decrease of False Pos-
itives (almost 48%) and increase in True Positives
(almost 14%). The game state information seems,
on one hand, to limit the class confusions between
”Tackle” and ”Ball-drive” (around -52%) and, on the
other hand, reduce the level of False Positives, as seen
in the confusion matrices in Figure 6.
4.3.3 The Benefits of Structured Predictions
In order to better understand in which cases structured
prediction is beneficial, and explain the observed im-
provement in our metrics, we compiled, per class, the
clips that contained false positive events when using
the TAAD, but that didn’t fool the TAAD + GNN ap-
proach.
One key benefit is the reduction of simultane-
ous false positives. TAAD occasionally detects ac-
tions that overlap with ongoing real actions, which is
unrealistic given there is only one ball and one ac-
Game State and Spatio-Temporal Action Detection in Soccer Using Graph Neural Networks and 3D Convolutional Networks
643
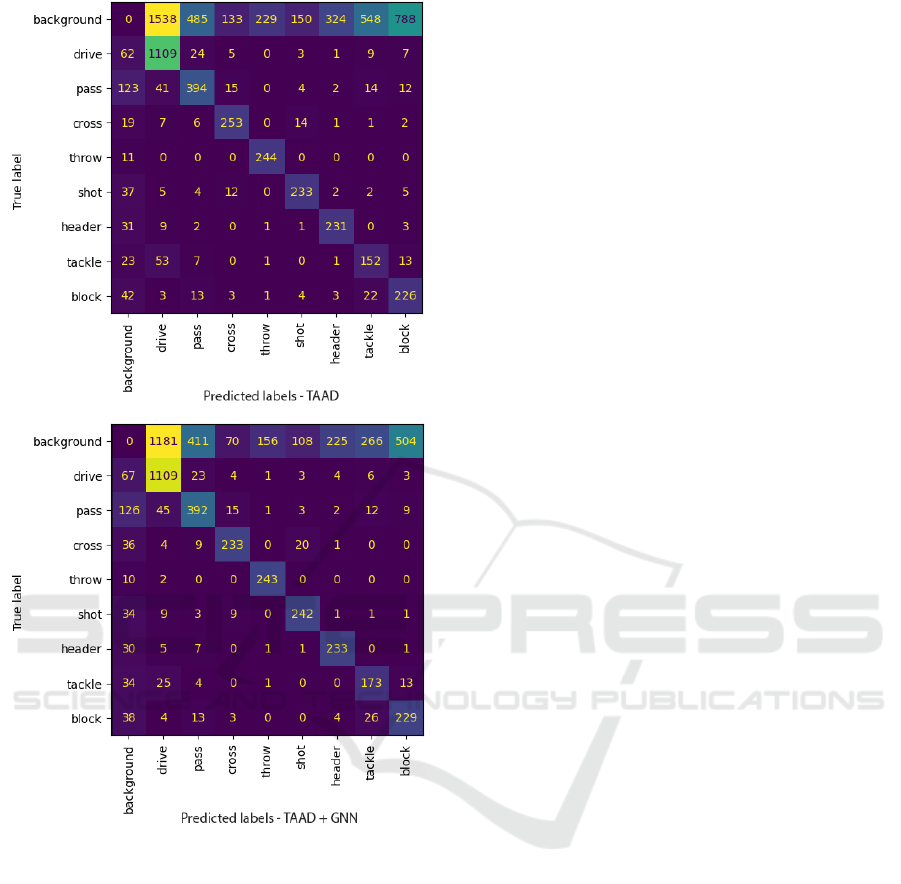
Figure 6: Confusion matrices obtained when applying
TAAD and TAAD + GNN, with IoU threshold at 0.2 and
confidence score threshold at 0.5.
tive player controlling it. For instance, TAAD might
falsely detect a player on the sideline as performing a
throw-in while another player is actively driving the
ball, due to reliance solely on player appearance and
gestures. By incorporating surrounding player infor-
mation and their relative configurations, such false
positives are eliminated, particularly in the Throw
class. While filtering detections by score could be an
alternative, 3D CNNs often exhibit overconfidence,
with false positives sometimes scoring higher than the
true action.
Another benefit is the reduction of false positives
in actions like Ball-blocks or Header. False posi-
tives often occur when a player attempts the gesture
but misses the ball, where motion blur and camera
perspective falsely suggest contact. These actions
usually happen in crowded areas, and successful ex-
ecution typically causes a noticeable ball trajectory
change, prompting surrounding players to accelerate.
When the ball is missed, the players’ movement re-
mains less disrupted. Our method appears to compen-
sate for 3D CNNs’ difficulty in linking ball trajectory
to player contact by learning how groups of players
react to sudden ball trajectory changes.
4.3.4 Team Sports and Occlusion
Many false positives happen when players are really
close to each others, leading either to ambiguous sit-
uations, when two players are equidistant from the
ball in screen space, or even to impossible detections
when players are not visible. Sometimes, two players
can have their bounding boxes with very high overlap,
which means that their features, extracted using a ROI
Align layer, are almost identical. This is for example
the case in many Header events when two players are
performing aerial duels. For those hard cases, further
research will be necessary, and it is highly probable
that each class of event will require its own approach.
5 CONCLUSIONS
We propose a method that combines visual features
and structured game state information, using Graph
Neural Networks, to enhance more traditional spatio-
temporal action detection methods in soccer. We
demonstrate the benefit of our method in the context
of high recall - low precision regime, required to gen-
erate reliable statistics more efficiently. Nevertheless,
our method sees little of the game: only 2 seconds. In
future works we envisage to push our hypothesis fur-
ther and overcome this temporal horizon by (i) using
our method to make “prior” predictions of actions for
each player, (ii) use sequence to sequence methods to
learn the logic and dynamic of the game on long se-
quences of events and leverage that knowledge to ei-
ther generate ”posterior” predictions per player, or de-
noise or score our sequences of detections, condition-
ally to the game state, and (iii) introduce additional
game state features, traditionally found in the litera-
ture about game state based methods to predict future
events.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
644

REFERENCES
Agrawal, P., Antoniak, S., Hanna, E. B., Bout, B., Chap-
lot, D., Chudnovsky, J., Costa, D., De Monicault, B.,
Garg, S., Gervet, T., et al. (2024). Pixtral 12b. arXiv
preprint arXiv:2410.07073.
Anzer, G., Bauer, P., Brefeld, U., and Faßmeyer, D. (2022).
Detection of tactical patterns using semi-supervised
graph neural networks. In 16th MIT Sloan Sports An-
alytics Conference.
Azar, S. M., Atigh, M. G., Nickabadi, A., and Alahi, A.
(2019). Convolutional relational machine for group
activity recognition. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 7892–7901.
Bagautdinov, T., Alahi, A., Fleuret, F., Fua, P., and
Savarese, S. (2017). Social scene understanding: End-
to-end multi-person action localization and collective
activity recognition. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 4315–4324.
Brefeld, U., Lasek, J., and Mair, S. (2019). Probabilis-
tic movement models and zones of control. Machine
Learning, 108(1):127–147.
Cartas, A., Ballester, C., and Haro, G. (2022). A graph-
based method for soccer action spotting using unsu-
pervised player classification. In Proceedings of the
5th International ACM Workshop on Multimedia Con-
tent Analysis in Sports, pages 93–102.
Chen, S., Sun, P., Xie, E., Ge, C., Wu, J., Ma, L., Shen, J.,
and Luo, P. (2021). Watch only once: An end-to-end
video action detection framework. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 8178–8187.
Cioppa, A., Giancola, S., Somers, V., Magera, F., Zhou,
X., Mkhallati, H., Deli
`
ege, A., Held, J., Hinojosa, C.,
Mansourian, A. M., et al. (2024). Soccernet 2023
challenges results. Sports Engineering, 27(2):24.
Deitke, M., Clark, C., Lee, S., Tripathi, R., Yang, Y., Park,
J. S., Salehi, M., Muennighoff, N., Lo, K., Soldaini,
L., et al. (2024). Molmo and pixmo: Open weights
and open data for state-of-the-art multimodal models.
arXiv preprint arXiv:2409.17146.
Dick, U., Link, D., and Brefeld, U. (2022). Who can re-
ceive the pass? a computational model for quantify-
ing availability in soccer. Data mining and knowledge
discovery, 36(3):987–1014.
Ding, D. and Huang, H. H. (2020). A graph attention
based approach for trajectory prediction in multi-
agent sports games. arXiv preprint arXiv:2012.10531.
Everett, G., Beal, R. J., Matthews, T., Early, J., Norman,
T. J., and Ramchurn, S. D. (2023). Inferring player
location in sports matches: Multi-agent spatial im-
putation from limited observations. arXiv preprint
arXiv:2302.06569.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88:303–338.
Fadel, S. G., Mair, S., da Silva Torres, R., and Brefeld, U.
(2023). Contextual movement models based on nor-
malizing flows. AStA Advances in Statistical Analysis,
107(1):51–72.
Feichtenhofer, C. (2020). X3d: Expanding architectures
for efficient video recognition. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 203–213.
Feichtenhofer, C., Fan, H., Malik, J., and He, K. (2019).
Slowfast networks for video recognition. In Proceed-
ings of the IEEE/CVF international conference on
computer vision, pages 6202–6211.
Gavrilyuk, K., Sanford, R., Javan, M., and Snoek, C. G.
(2020). Actor-transformers for group activity recogni-
tion. In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition, pages 839–
848.
Girdhar, R., Carreira, J., Doersch, C., and Zisserman, A.
(2018). A better baseline for AVA. arXiv preprint
arXiv:1807.10066.
Girdhar, R., Carreira, J., Doersch, C., and Zisserman, A.
(2019). Video action transformer network. In Pro-
ceedings of the IEEE/CVF conference on computer vi-
sion and pattern recognition, pages 244–253.
Gu, C., Sun, C., Ross, D. A., Vondrick, C., Pantofaru, C.,
Li, Y., Vijayanarasimhan, S., Toderici, G., Ricco, S.,
Sukthankar, R., et al. (2018). Ava: A video dataset
of spatio-temporally localized atomic visual actions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 6047–6056.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-CNN. In Proceedings of the IEEE interna-
tional conference on computer vision, pages 2961–
2969.
Hong, J., Zhang, H., Gharbi, M., Fisher, M., and Fatahalian,
K. (2022). Spotting temporally precise, fine-grained
events in video. In European Conference on Computer
Vision, pages 33–51. Springer.
Jha, D., Rauniyar, A., Johansen, H. D., Johansen, D.,
Riegler, M. A., Halvorsen, P., and Bagci, U. (2022).
Video analytics in elite soccer: A distributed com-
puting perspective. In 2022 IEEE 12th Sensor Ar-
ray and Multichannel Signal Processing Workshop
(SAM), pages 221–225. IEEE.
Kalogeiton, V., Weinzaepfel, P., Ferrari, V., and Schmid,
C. (2017). Action tubelet detector for spatio-temporal
action localization. In Proceedings of the IEEE inter-
national conference on computer vision, pages 4405–
4413.
Kingma, D. and Ba, J. (2015). Adam: A method for
stochastic optimization. In International Conference
on Learning Representations (ICLR), San Diega, CA,
USA.
K
¨
op
¨
ukl
¨
u, O., Wei, X., and Rigoll, G. (2019). You only
watch once: A unified cnn architecture for real-time
spatiotemporal action localization. arXiv preprint
arXiv:1911.06644.
Li, Y., Chen, L., He, R., Wang, Z., Wu, G., and Wang,
L. (2021). Multisports: A multi-person video dataset
Game State and Spatio-Temporal Action Detection in Soccer Using Graph Neural Networks and 3D Convolutional Networks
645

of spatio-temporally localized sports actions. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 13536–13545.
Li, Y., Wang, Z., Wang, L., and Wu, G. (2020). Actions
as moving points. In Computer Vision–ECCV 2020:
16th European Conference, Glasgow, UK, August 23–
28, 2020, Proceedings, Part XVI 16, pages 68–84.
Springer.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Liu, H., Li, C., Wu, Q., and Lee, Y. J. (2024). Visual in-
struction tuning. Advances in neural information pro-
cessing systems, 36.
Mandadapu, P. (2024). The evolution of football betting-
a machine learning approach to match outcome fore-
casting and bookmaker odds estimation. arXiv
preprint arXiv:2403.16282.
Martens, F., Dick, U., and Brefeld, U. (2021). Space and
control in soccer. Frontiers in Sports and Active Liv-
ing, 3:676179.
Martin, P.-E. (2020). Fine-grained action detection and
classification from videos with spatio-temporal convo-
lutional neural networks: Application to Table Tennis.
PhD thesis, Universit
´
e de Bordeaux.
Redmon, J. (2016). You only look once: Unified, real-time
object detection. In Proceedings of the IEEE confer-
ence on computer vision and pattern recognition.
Rudolph, Y. and Brefeld, U. (2022). Modeling conditional
dependencies in multiagent trajectories. In Proceed-
ings of The 25th International Conference on Artifi-
cial Intelligence and Statistics, pages 10518–10533.
PMLR. ISSN: 2640-3498.
Saha, S., Singh, G., Sapienza, M., Torr, P. H., and Cuz-
zolin, F. (2016). Deep learning for detecting multi-
ple space-time action tubes in videos. arXiv preprint
arXiv:1608.01529.
Singh, G., Choutas, V., Saha, S., Yu, F., and Van Gool, L.
(2023). Spatio-temporal action detection under large
motion. In Proceedings of the IEEE/CVF Winter Con-
ference on Applications of Computer Vision, pages
6009–6018.
Singh, G., Saha, S., Sapienza, M., Torr, P. H., and Cuzzolin,
F. (2017). Online real-time multiple spatiotemporal
action localisation and prediction. In Proceedings of
the IEEE international conference on computer vi-
sion, pages 3637–3646.
Soomro, K., Zamir, A. R., and Shah, M. (2012). UCF101:
A dataset of 101 human actions classes from videos in
the wild. CoRR, abs/1212.0402.
Tomei, M., Baraldi, L., Calderara, S., Bronzin, S., and Cuc-
chiara, R. (2021). Video action detection by learning
graph-based spatio-temporal interactions. Computer
Vision and Image Understanding, 206:103187.
Vo-Ho, V.-K., Le, N., Kamazaki, K., Sugimoto, A., and
Tran, M.-T. (2021). Agent-environment network for
temporal action proposal generation. In ICASSP 2021-
2021 IEEE International Conference on Acoustics,
Speech and Signal Processing (ICASSP), pages 2160–
2164. IEEE.
Wang, P., Bai, S., Tan, S., Wang, S., Fan, Z., Bai, J.,
Chen, K., Liu, X., Wang, J., Ge, W., et al. (2024).
Qwen2-vl: Enhancing vision-language model’s per-
ception of the world at any resolution. arXiv preprint
arXiv:2409.12191.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M.,
and Solomon, J. M. (2019). Dynamic graph cnn
for learning on point clouds. ACM Transactions on
Graphics (tog), 38(5):1–12.
Weinzaepfel, P., Harchaoui, Z., and Schmid, C. (2015).
Learning to track for spatio-temporal action localiza-
tion. In Proceedings of the IEEE international confer-
ence on computer vision, pages 3164–3172.
Zhang, Y., Tokmakov, P., Hebert, M., and Schmid, C.
(2019). A structured model for action detection. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 9975–
9984.
Zhao, J., Zhang, Y., Li, X., Chen, H., Shuai, B., Xu, M., Liu,
C., Kundu, K., Xiong, Y., Modolo, D., et al. (2022).
Tuber: Tubelet transformer for video action detection.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 13598–
13607.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
646
