
Improving Temporal Knowledge Graph Forecasting via Multi-Rewards
Mechanism and Confidence-Guided Tensor Decomposition
Reinforcement Learning
Nam Le
1,2 a
, Thanh Le
1,2 b
and Bac Le
1,2 c
1
Faculty of Information Technology, University of Science, Ho Chi Minh City, Vietnam
2
Vietnam National University, Ho Chi Minh City, Vietnam
fi
Keywords:
Temporal Knowledge Graph Reasoning, Reinforcement Learning, Multi-Reward Function, Tensor
Decomposition.
Abstract:
Temporal knowledge graph reasoning, which has received widespread attention in the knowledge graph re-
search community, is a task that predicts missing facts in data. When framed as a problem of forecasting
future events, it becomes more challenging than the conventional completion task. Reinforcement learning is
one of the potential techniques to address these challenges. Specifically, an agent navigates through a histor-
ical snapshot of a knowledge graph to find answers to the input query. However, these learning frameworks
suffer from two main drawbacks: (1) a simplistic reward function and (2) candidate action selection being
influenced by data sparsity issues. To address these problems, we propose a multi-reward function that inte-
grates binary, adjusted path-based, adjusted ground truth-based, and high-frequency rule rewards to enhance
the agent’s performance. Furthermore, we incorporate recent advanced tensor decomposition methods such as
TuckER, ComplEx, and LowFER to construct a reliability evaluation module for candidate actions, allowing
the agent to make more reliable action choices. Our empirical results on benchmark datasets demonstrate sig-
nificant improvements in performance while preserving computational efficiency and requiring fewer trainable
parameters.
1 INTRODUCTION
Temporal knowledge graphs (TKGs) extend the rep-
resentation of events from static KG triples in the
form of (s,r,o)—where s and o are the subject and
object entities, respectively, and r represents their re-
lationship—to quadruples (s,r,o,t), with the inclu-
sion of a timestamp to indicate the validity of the
fact at a specific point or time interval. For instance:
(Japan, Make a visit, Thailand, 2014-09-22). As
such, TKGs can evolve continuously over time. There
is a substantial amount of research applying KGs and
TKGs to fields like question-answering (Mavroma-
tis et al., 2022) and recommendation systems (Chen
et al., 2022).
KGs and TKGs are inherently incomplete. There-
fore, the reasoning task of discovering missing or
new facts from known ones plays a crucial role.
a
https://orcid.org/0000-0002-2273-5089
b
https://orcid.org/0000-0002-2180-4222
c
https://orcid.org/0000-0002-4306-6945
This problem is typically studied under two dif-
ferent setups: 1) interpolation and 2) extrapo-
lation. Most interpolation-based methods, such
as TTransE (Leblay and Chekol, 2018a), TA-
DistMult (Garc
´
ıa-Dur
´
an et al., 2018), and DE-
SimplE (Goel et al., 2020), focus on completing
data from known facts without temporal constraints,
meaning they primarily predict missing facts asso-
ciated with past timestamps. This work focuses on
the extrapolation link prediction problem, designing a
model to predict future links. For example, the ques-
tion ”Who will be the president of the USA in 2024?”
can be converted into the problem of future link pre-
diction as: (?, president of, USA, 2024).
Reasoning on knowledge graph with the extrapo-
lation setup presents more challenges than interpola-
tion due to temporal constraints in the data. Further-
more, many unknown entities in the query make it dif-
ficult for learning models to adapt quickly. Recently,
path-based reasoning methods for static knowledge
graphs, such as DeepPath (Xiong et al., 2017), MIN-
ERVA (Das et al., 2017), and Multi-hop KG (Lin
68
Le, N., Le, T. and Le, B.
Improving Temporal Knowledge Graph Forecasting via Multi-Rewards Mechanism and Confidence-Guided Tensor Decomposition Reinforcement Learning.
DOI: 10.5220/0013161400003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 68-79
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

et al., 2018), as well as for TKGs such as TimeTrav-
eler (Sun et al., 2021), have shown significant im-
provements in both performance and interpretability
for knowledge graph reasoning tasks. However, these
methods still have several limitations: 1) The reward
function is a critical component for the agent. Most
current works focus on constructing a binary global
reward function, which makes the agent’s learning
process inflexible. 2) The action space for the agent
is too large, and there is limited research on how to
select appropriate actions for the agent.
In this work, we propose a more flexible tempo-
ral path-based reasoning model to address the extrap-
olation reasoning task in TKGs. Our agent, named
“CATTer” (Confidence-Augmented Time Traveler)
based on TimeTraveler (Sun et al., 2021). We pro-
pose reward function criteria such as binary global,
adjusted ground truth frequency, adjusted path length,
and high-frequency rule rewards, with greater flexi-
bility to stabilize the agent’s learning process. Ad-
ditionally, we integrate tensor decomposition mod-
els into the policy network to generate probabili-
ties that represent the reliability of actions, help-
ing the agent more easily select appropriate ac-
tions. Moreover, our policy network is implemented
with Kolmogorov-Arnold Networks (KAN), achiev-
ing performance comparable to multi-layer percep-
trons (MLP).
The main contributions of our work are as follows:
• Proposing a new multi-reward function, incorpo-
rating various reward criteria for the agent, such
as binary global, adjusted ground truth frequency,
path length, and high-frequency rules, with en-
hanced flexibility. This approach aims to improve
the agent’s learning and reasoning process.
• Incorporating Tensor decomposition architectures
such as TuckER, ComplEx, and LowFER with
MLP and KAN-Policy Network to generate relia-
bility scores for actions. This enhances the agent’s
ability to select appropriate actions within the KG
environment.
• Performing experiments and ablation study on
standard datasets for the future link prediction
task. Results based on MRR and Hit@K metrics
demonstrate significant improvements compared
to baseline models.
Our work is organized as follows: Section 2 intro-
duces related works, focusing mainly on the existing
path-based models for static and temporal KG reason-
ing. Section 3 details our proposed model. Section 4
discusses the experimental setup, main empirical re-
sults, and ablation studies. Finally, Section 5 summa-
rizes our conclusions and future research discussion.
2 RELATED WORKS
RL has a wide range of applications in the field of KG
reasoning, often referred to as path-based reasoning.
This work applies this approach to reasoning tasks on
static and temporal KGs.
2.1 RL for Static Knowledge Graph
Reasoning
In contrast to traditional embedding-based methods
that map entities and relations into low-dimensional
continuous spaces, such as TransE (Bordes et al.,
2013) and ComplEx (Trouillon et al., 2016), or
deep learning techniques like Convolutional Neural
Networks (e.g., ConvE (Dettmers et al., 2018)) or
Graph Neural Networks (e.g., R-GCN (Schlichtkrull
et al., 2018)), path reasoning methods such as Deep-
Path (Xiong et al., 2017), MINERVA (Das et al.,
2017), and Multi-hop KG (Lin et al., 2018) treat
the task of link prediction or knowledge graph rea-
soning as a Markov Decision Process (MDP). These
approaches enhance link prediction performance by
finding paths between the source and target entities.
Moreover, such methods offer more significant poten-
tial for understanding the internal mechanics of learn-
ing models or agents.
2.2 RL for Temporal Knowledge Graph
Reasoning
In TKG research, path-based reasoning or reinforce-
ment learning-based methods are often applied to
link prediction tasks in an extrapolation setting, also
known as future link forecasting. In addition to Graph
Neural Network-based methods like RE-NET (Jin
et al., 2019) and CyGNet (Zhu et al., 2021a), or neu-
ral network-based methods enhanced by orthogonal
differential equations such as TANGO (Han et al.,
2021b), RL-based models like TAgent (Tao et al.,
2021), TITer (Sun et al., 2021), TPath (Bai et al.,
2021), DREAM (Zheng et al., 2023), and RLAT (Bai
et al., 2023) also show strong potential for predict-
ing future links with associated timestamps. TAgent
(Tao et al., 2021) proposed an agent that utilizes bi-
nary terminal reward for learning. TPath (Bai et al.,
2021) utilizes path length to construct a reward func-
tion. Recently, DREAM (Zheng et al., 2023) and
RLAT (Bai et al., 2023) utilized an attention mecha-
nism to design a black-box reward function for agent
learning.
Improving Temporal Knowledge Graph Forecasting via Multi-Rewards Mechanism and Confidence-Guided Tensor Decomposition
Reinforcement Learning
69

3 PROPOSED METHODOLOGY
3.1 Problem Statement
Let E, R , T , and Q denote the sets of entities,
relations, timestamps, and quadruples, respectively.
Each quadruplet in TKG can be defined as a tuple
(e
s
,r,e
o
,t), where r ∈ R is a relation connecting a
subject entity e
s
∈ E with an object entity e
o
∈ E
at timestamp t ∈ T . In this work, we consider TKG
in as discrete form, i.e., a sequence of discrete snap-
shots over time G
(1,T )
= {G
1
,G
2
,..., G
T
}, where G
t
=
{E
t
,R ,Q
t
} is a static multi-relational graph, and E
t
and Q
t
denote entities and facts that exist at time t.
In this work, we consider the problem of
extrapolation-based TKG reasoning. In particular,
given a TKG, the main goal is to predict the events
that can occur in future time points to capture the evo-
lution of TKG through the timeline, i.e., link predic-
tion and future times. Formally, with given a query
(e
q
,r
q
,?,t
q
) or (?,r
q
,e
q
,t
q
), we have a set of known
facts {(e
s
i
,r
i
,e
o
i
,t
i
)|t
i
< t
q
}, our goal is to predict the
missing object or subject entity in the input query.
This work considers this problem as a Markov De-
cision Process (MDP) and uses Reinforcement Learn-
ing (RL) to solve it. Figure 1 illustrates an overview
of our proposed model.
3.2 Reinforcement Learning
Framework
Reinforcement learning frameworks for KG reason-
ing typically consist of four main components: states,
actions, transitions, and reward functions. These
components can be summarized as follows:
States. Let S be the state space. Each s
ℓ
=
(e
(ℓ)
,t
(ℓ)
,e
q
,t
q
,r
q
) ∈ S where represents a state in
state space. The agent starts searching from (e
q
,t
q
) so
the initial state is s
0
= (e
q
,t
q
,e
q
,t
q
,r
q
). Tuple e
(ℓ)
,t
(ℓ)
and e
q
,t
q
,r
q
are considered as local and global infor-
mation, respectively.
Actions. Let A be the action space. At each step
ℓ, let A
ℓ
be the set of actions for this step. Clearly,
A
ℓ
⊂ A. Formally, A
ℓ
= {(r
′
,e
′
,t
′
)|(e
ℓ
,r
′
,e
′
,t
′
) ∈
Q ,t
′
≤ t
ℓ
,t
′
< t
q
} is sampled from the set of all feasi-
ble outgoing edges starting from e
t
ℓ
ℓ
for memory opti-
mization.
Transitions. In the RL framework, the agent lever-
ages a transition function to transfer from one state to
another. Formally, the transition function ξ : S ×A →
S defined by:
(s
ℓ
,A
ℓ
) 7→ (e
ℓ+1
,t
ℓ+1
,e
q
,t
q
,r
q
) = s
ℓ+1
(1)
where A
ℓ
is the sampled from the feasible set of out-
going edges starting from e
t
ℓ
ℓ
.
Rewards. Reward functions are important in rein-
forcement learning frameworks. One of the common
types is the binary reward function. Specifically, if
the agent captures the target entity e
gt
, which mean it
end up with terminal state s
L
= (e
L
,t
L
,e
q
,t
q
,r
q
) where
e
L
= e
gt
and (e
q
,r
q
,e
gt
,t
q
) ∈ Q , and 0 otherwise. For-
mally, the binary global reward function is defined by:
R
bin
(s
L
) = I(e
ℓ
== e
gt
), (2)
where I(.) is a function that return 1 or 0.
3.3 Tensor Decomposition
Confidence-Guided Policy Network
The policy network is one of the main components
of the reinforcement learning framework. A general
policy network for KG reasoning consists of three
main components: dynamic embedding, path encod-
ing, and action scoring. In this work, we design a
confidence-augmented based MLP (Multi-Layer Per-
ceptron) and KAN (Kolmogorov-Arnold Networks)
policy network which allow us to calculate the proba-
bility distribution over all the candidate actions A
(ℓ)
at
step ℓ, concerning the current state s
(ℓ)
, search history
h
(ℓ)
= (e
q
,t
q
,r
1
,(e
1
,t
1
),. ..,r
ℓ
,(e
ℓ
,t
ℓ
)) and confidence
probability c
a|q
for each a ∈ A
(ℓ)
Dynamic Embedding. Following TITer (Sun et al.,
2021), one dense vector embedding r ∈ R
d
r
is as-
signed for a relation r ∈ R . To capture the character
of changing over the timeline of entities, a dynamic
embedding is used to represent variant features for
each node e
t
i
= (e
i
,t) ∈ G
t
, and a static embedding
e ∈ R
d
e
is used to represent latent invariant features
of these nodes. For encoding timestamp, a relative
time encoding function Φ : R → R
d
t
is defined by:
Φ(t
q
−t) = σ(w∆t + b) = Φ(∆t) (3)
where w,b ∈ R
d
t
are learnable parameter vectors, and
σ(.) is an activation function (such as sin(.),cos(.) or
sigmoid(.)). d
r
,d
e
, and d
t
are the embedding dimen-
sions for relation, entity, and timestamp. Finally, the
final representation of a node e
t
i
is defined by:
e
t
i
= [e
i
;Φ(∆t)] (4)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
70
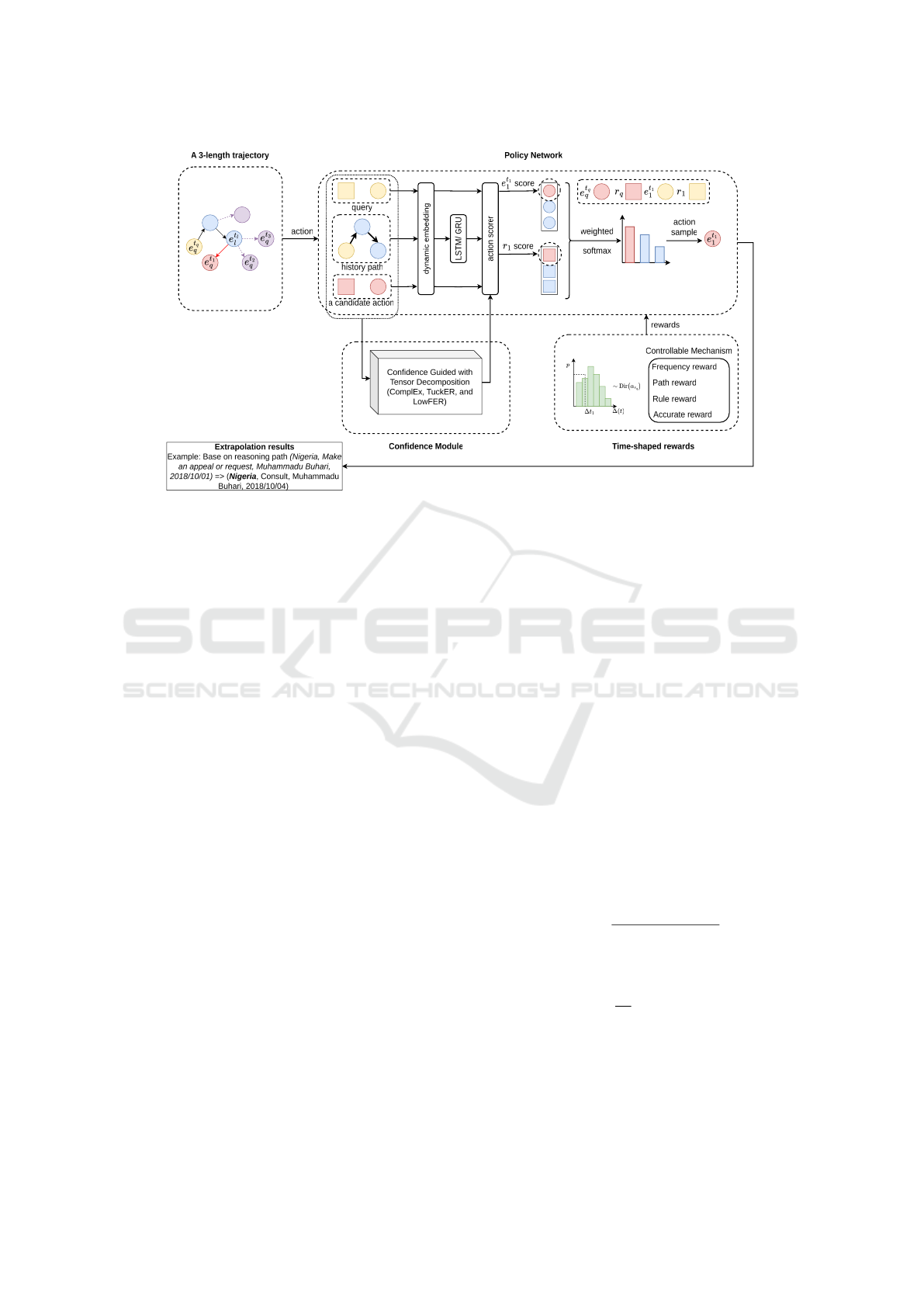
Figure 1: Overview of our proposed model CATTer. With the input (e
q
,r
q
,? (e
gt
),t
q
), model starts from node e
t
q
q
to search the
answer. It samples an outgoing edge at each step and translates to a new node according to the results of the policy network.
Suppose that e
t
ℓ
ℓ
is the current node. To compute the score for one candidate action (r
1
,e
1
,t
1
), model sample actions based on
the joint probability of transition probability calculated from all candidate scores and confidence probability obtained from
a Tensor Decomposition such as ComplEx, TuckER, and LowFER. After that, the Dirichlet distribution-based time-shaped
multi-reward function rewards the agent for its selected actions.
Historical Path Encoding. With the searching his-
tory h
(ℓ)
= ((e
q
,t
q
),r
1
,(e
1
,t
1
),. ..,r
ℓ
,(e
ℓ
,t
ℓ
)), we use
two strategies to encode this sequence. First, the agent
leverages an LSTM to encode this history sequence.
This process is formulated as:
h
lstm
ℓ
= LSTM(h
l−1
,[r
l−1
;e
t
l−1
l−1
]),
h
lstm
0
= LSTM(0,[r
0
;e
t
q
q
]).
(5)
In the second one, our agent leverages a GRU to en-
code this history sequence. This process is formulated
as follows:
h
gru
ℓ
= GRU([r
l−1
;e
t
l−1
l−1
],h
l−1
),
h
gru
0
= GRU([r
0
;e
t
q
q
,0]).
(6)
In the Eq. (5) and (6), r
0
is dummy relation for initial-
ization.
Confidence-Guided Multi-Layer Perceptron for
Action Scoring. The action scoring module allows
us to score each action and return the transition prob-
ability for the next state. We apply two strategies for
designing this module: Multi-layer Perceptron (MLP)
and Kolmogorov-Arnold Networks (KAN) with con-
fidence rate augmentation via tensor decomposition
sub-module. First, let a
n
= (e
n
,t
n
,r
n
) ∈ A
ℓ
denotes
an action at step ℓ, the final candidate action score
φ(a
n
,s
ℓ
) can be formulated by:
φ(a
n
,s
ℓ
) = β
n
e
e,e
t
n
n
+ (1 − β
n
)
⟨
e
r,r
n
⟩
, (7)
with
e
e = W
e
ReLU(W
1
[h
lstm/gru
ℓ
;e
t
q
q
;r
q
]),
e
r = W
r
ReLU(W
1
[h
lstm/gru
ℓ
;e
t
q
q
;r
q
]),
β
n
= sigmoid(W
β
[h
lstm/gru
ℓ
;e
t
q
q
;r
q
;e
t
n
n
;r
n
]),
where W
1
, W
e
, W
r
and W
β
are trainable parameters.
Then, we calculate the confidence rate c
a
n
|q
of
each a
n
∈ A
ℓ
via softmax function which receive
the input vector from tensor decomposition such as
TuckER (Bala
ˇ
zevi
´
c et al., 2019), ComplEx (Trouil-
lon et al., 2016), and LowFER (Amin et al., 2020) as
follow:
c
a
n
|q
=
exp(ψ
a
n
|q
)
∑
a
′
ℓ
∈A
ℓ
exp(ψ
a
′
ℓ
|q
)
, (8)
where
ψ
a
n
|q
= W ×
1
e
t
q
q
×
2
r
q
×
3
e
t
n
n
, if use TuckER,
ψ
a
n
|q
= Re
D
e
t
q
q
,r
q
,e
t
n
n
E
if use ComplEx,
ψ
a
n
|q
= (S
k
diag(U
⊤
e
t
q
q
)V
⊤
r
q
)
⊤
e
t
n
n
,if use LowFER,
with W ∈ R
2d
e
×d
e
×d
e
is a learnable core tensor in-
troduced in (Bala
ˇ
zevi
´
c et al., 2019), ×
1
,×
2
, and
×
3
are tensor product in three different modes
Improving Temporal Knowledge Graph Forecasting via Multi-Rewards Mechanism and Confidence-Guided Tensor Decomposition
Reinforcement Learning
71

(see (Bala
ˇ
zevi
´
c et al., 2019; Tucker et al., 1964) for
more details), Re(.) returns the real vector compo-
nent for input embedding, U ∈ R
d
e
×kd
e
, V ∈ R
d
r
×kd
e
,
diag(U
⊤
e
t
q
q
) ∈ R
kd
e
×kd
e
and S
k
∈ R
d
e
×kd
e
is constant
matrix which defined as
S
k
i, j
=
(
1, ∀ j ∈ [(i − 1)k + 1,ik]
0, otherwise
(9)
After scoring all candidate actions in A
ℓ
and calcu-
lating the confidence rate for all of them, the policy
π
θ
(a
ℓ
| s
ℓ
) at step ℓ is defined as:
π
θ
(a
ℓ
| s
ℓ
) =
exp(φ(a
ℓ
,s
ℓ
) ∗ c
a
ℓ
|q
)
∑
a
′
ℓ
∈A
ℓ
exp(φ(a
′
ℓ
,s
ℓ
) ∗ c
a
′
ℓ
|q
)
(10)
Confidence-Guided Kolmogorov-Arnold Net-
works for Action Scoring. Based on the
Kolmogorov-Arnold representation (KAR) theo-
rem, with a given smooth function f : [0,1]
n
→ R,
f (x) = f (x
1
,..., x
n
) =
2n+1
∑
q=1
W
q
(
n
∑
p=1
W
q,p
(x
p
)) (11)
where W
q,p
: [0,1] → R and W
q
: R → R.
Due to the limitation of expressiveness of the
KAR Theorem, (Liu et al., 2024) design techniques
to generalize this for arbitrary depths and widths. For-
mally, KAR can be written in matrix form as
f (x) = W
kan
out
◦ W
kan
in
◦ x, (12)
where
W
kan
in
=
w
1,1
(·) ··· w
1,n
(·)
.
.
.
.
.
.
w
2n+1,1
(·) ·· · w
2n+1,n
(·)
,
W
kan
out
=
W
1
(·) ·· · W
2n+1
(·)
Then, a Kolmogorov-Arnold layer is defined as:
W
kan
=
w
1,1
(·) ··· w
1,n
in
(·)
.
.
.
.
.
.
w
n
out
,1
(·) ·· · w
n
out
,n
in
(·)
, (13)
where W
kan
in
corresponds to n
in
= n,n
out
= 2n +1, and
W
kan
out
corresponds to n
in
= 2n + 1, n
out
= 1.
After defining the layer, we can construct a
Kolmogorov-Arnold network for action scoring as:
φ(a
n
,s
ℓ
) = β
n
e
e,e
t
n
n
+ (1 − β
n
)
⟨
e
r,r
n
⟩
, (14)
with
e
e = W
kan
e
(W
kan
1
[h
lstm/gru
ℓ
;e
t
q
q
;r
q
]),
e
r = W
kan
r
(W
kan
1
[h
lstm/gru
ℓ
;e
t
q
q
;r
q
]),
β
n
= sigmoid(W
kan
β
[h
lstm/gru
l
;e
t
q
q
;r
q
;e
t
n
n
;r
n
]),
And then, by applying confidence techniques, we ob-
tain the policy π
θ
(a
ℓ
| s
ℓ
) at step ℓ via the softmax
function.
3.4 Multi-Reward Mechanism with
Rule Enhancing
To obtain more flexible reward functions, we adopt
multi-type rewards, including binary global, adjusted
ground truth frequency, adjusted path length, and
high-frequency rule reward, into a weighted fusion
scheme.
Binary Global Reward. Following the original RL
framework, which is introduced in Section 3.2, we
formulate a binary global reward that is defined by:
R
bin
(s
L
) = I(e
ℓ
== e
gt
). (15)
Adjusted Ground Truth Frequency Reward. In-
spired by MPNet (Wang et al., 2024), we intro-
duce a more flexible frequency reward, named ad-
justed ground truth frequency reward. With given
(e
q
,r
q
,e
gt
,t
q
), N
gt
= {n
1
,n
2
,. . .,n
m
} denote the num-
ber of times that the e
gt
occur in m snapshot
{G
t
q
−1
,G
t
q
−2
,. . .,G
t
q
−m
}, i.e., n
i
,(i = 1,. .., m) is the
number of times that e
gt
occurs in subgraph G
t
q
−i
. We
define the ground truth frequency reward as follows:
R
gt
(s
L
) =
(
f
i
, if t
q−m
≤ t
i
≤ t
q
,
0,
(16)
where
f
i
=
n
i
max(N
gt
) − min(N
gt
)
.
Adjusted Path Length Reward. Following MP-
Net (Wang et al., 2024), we introduce a more flexi-
ble path length reward, named adjusted path length
reward which can be defined as:
R
path
(s
L
) =
w
path
p
ℓ
− 1
(17)
where p
ℓ
≤ p
max
denotes the length of the path taken
by the agent to capture the target entity from the
source node at step ℓ, p
max
is the maximum path
length which agent can reach a node, and w
path
∈
(0,1) is the weight for current path length which is
taken.
High-Frequency Rule Reward. Knowledge
graphs usually contain a pair entity relation, fre-
quently appearing in the timelines. Formally, given a
common pair entity-relation set, which is denoted as
ER = {(e
i
,r
i
)}
k
i=1
. Each pair in ER has a frequency
of occurrence greater than or equal to a threshold
ϑ depending on the dataset. Then, we define a
high-frequency rule reward for our agent as follows:
R
rule
(s
L
) =
(
w
rule
, if (e
ℓ
,r
ℓ
) ∈ ER,
0, otherwise
(18)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
72

where w
rule
is reward value for matching rule.
Multi-Reward Fusion. After defining multi-
reward, we put them into the primary reward
function with α
1
∈ (0,1), α
2
∈ (0,1), and α
3
∈ (0,1)
are weights for binary reward (Section 3.4), Ad-
justed ground truth frequency reward (Section 3.4),
Adjusted path length reward (Section 3.4), and high-
frequency rule reward (Section 3.4), respectively, as
follow:
R = (1 + α
1
R
gt
)(1 + α
2
R
rule
)(R
bin
+ α
3
R
path
) (19)
3.5 Agent Parameter Learning
Following TITer (Sun et al., 2021), the search path
length is fixed to a length of L. Then, the pol-
icy network π
θ
generates a L-length trajectory as
{a
1
,a
2
,..., a
L
}. The training objective is maximizing
the expected multi-reward of the agent overall train-
ing set Q
train
:
J(θ) = E
(e
s
,r,e
o
,t)∼Q
train
[E
a
1
,...,a
L
∼π
θ
[
e
R(s
L
|e
s
,r,t)]].
(20)
where
e
R(s
L
) = (1 + p
∆t
L
R(s
L
), ∆t
L
= t
q
− t
L
,
(p
1
,. . ., p
k
) ∼ Dirichlet(α
r
q
) with α
r
q
∈ R
K
is the
Dirichlet distribution (Johnson et al., 1972; Ng et al.,
2011) parameters vector of relation r
q
.
Then, a policy gradient method is applied to op-
timize the policy network. In this work, we apply
REINFORCE algorithm (Williams, 1992) that will
iterate through all quadruple in Q
train
and update θ
with the following stochastic gradient method such
as SGD (Ruder, 2016), Adam (Ruder, 2016; Kingma,
2014) or AdaGrad (Duchi et al., 2011):
∇
θ
J(θ) ≈ ∇
θ
∑
m∈[1,L]
e
R(s
L
|e
s
,r,t)log π
θ
(a
ℓ
|s
ℓ
) (21)
4 EXPERIMENTS AND RESULTS
4.1 Experiment Setting
Standard Benchmark Datasets. During the exper-
iment process, we use four common TKG datasets for
evaluation, including ICEWS14, ICEWS18 (Boschee
et al., 2015), WIKI (Leblay and Chekol, 2018b), and
YAGO (Mahdisoltani et al., 2015).
(i) ICEWS14 and ICEWS18 are extracted from
Integrated Crisis Early Warning System
(ICEWS) (Boschee et al., 2015). These two
datasets contain real-world facts from 2014 and
2018 with time granularity at the day level.
(ii) WIKI (Leblay and Chekol, 2018a) and
YAGO (Mahdisoltani et al., 2013) are two
KGs that contain real-world facts with time
information. Following previous work (Sun
et al., 2021), these two datasets are used with
time granularity at year level. for performing the
evaluation.
We meticulously adopt a train-test split strategy for
the training and testing stage, as detailed in (Sun et al.,
2021; Jin et al., 2020). This strategy involves splitting
the dataset into three subsets, including train, vali-
dation, and test set in a specific order of timestamp,
ensuring a comprehensive evaluation. Table 1 sum-
marizes the statistical information about these four
datasets.
Evaluation Protocol and Metrics. We compare
our proposed model to the problem of predicting
missing events at future timestamps. In a TKG, the
number of relations is significantly smaller than the
number of entities, making entity prediction more
challenging than relation prediction. Consequently,
TKG tasks often focus on predicting missing enti-
ties. Given a KG dataset, we address two types of
entity prediction: (e
s
,r,?,t) and (?,r,e
o
,t), where ?
represents the missing entity. To enhance the evalua-
tion consistency, we apply a time-aware filtering (Han
et al., 2020) which is the same as TITer (Sun et al.,
2021), which filters only those quadruples that match
the query time t.
After ranking all the candidates according to their
scores calculated by beam search according to the
joint probability of transition probability and confi-
dence probability, if the ground truth entity does not
appear, the rank is set as the number of entities in the
dataset. Then, we employ two metrics widely used
in TKG research: Mean Reciprocal Rank (MRR) and
Hits@k, where the higher MRR and Hits@k indicate
better performance.
Baselines. We compare our model with the existing
state-of-the-art KG reasoning model:
(i) Interpolation-based models: TTransE (Leblay
and Chekol, 2018a), TA-DistMult (Garc
´
ıa-Dur
´
an
et al., 2018), DE-SimplE (Goel et al., 2020), and
TNTComplEx (Lacroix et al., 2020).
(ii) Extrapolation-based models: RE-NET (Jin
et al., 2020), CyGNet (Zhu et al., 2021b),
TANGO (Ding et al., 2021), xERTE (Han et al.,
2021a), and TITer (Sun et al., 2021).
Implementation Details. Our proposed model is
implemented based on TITer. The official source code
Improving Temporal Knowledge Graph Forecasting via Multi-Rewards Mechanism and Confidence-Guided Tensor Decomposition
Reinforcement Learning
73
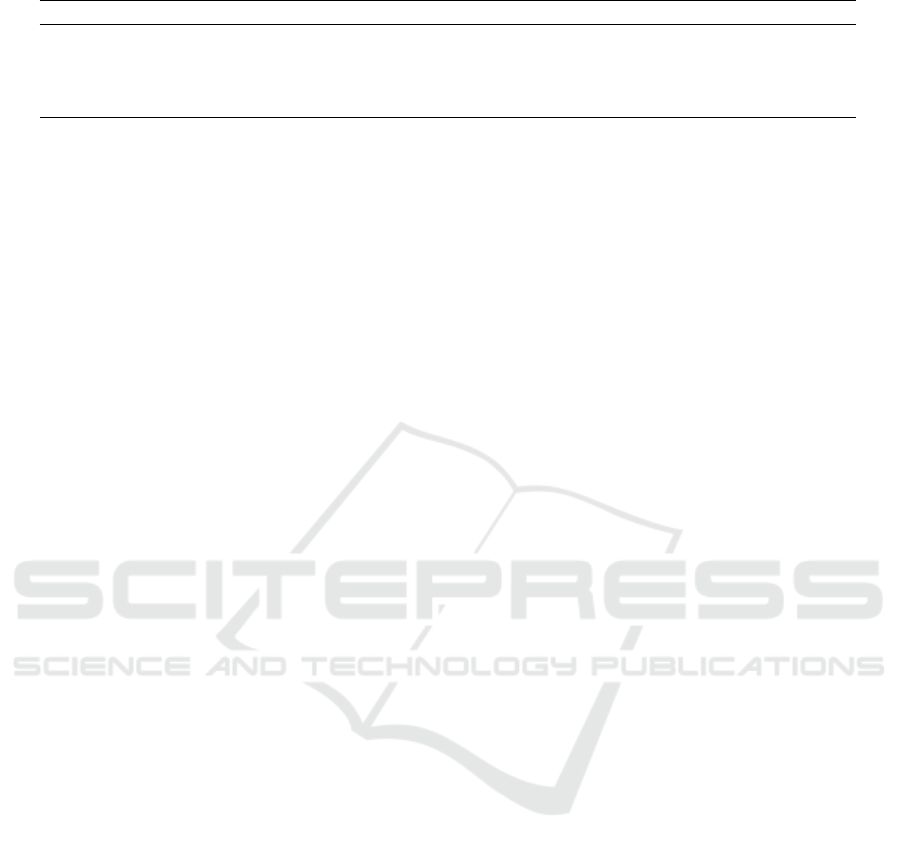
Table 1: Statistics information on benchmark datasets.
Dataset #train #valid #test #ent #rel Time granularity
ICEWS14 (Boschee et al., 2015) 63685 13823 13222 7128 230 24 hours
ICEWS18 (Boschee et al., 2015) 373018 45995 49545 23033 256 24 hours
WIKI (Leblay and Chekol, 2018a) 539286 67538 63110 12554 24 1 year
YAGO (Mahdisoltani et al., 2013) 161540 19523 20026 10623 10 1 year
of this model can be found at https://github.com/JHL-
HUST/TITer. By default, we set the entity embed-
ding, relation embedding, and relative time encoding
dimension to 80, 100, and 20, respectively. For train-
ing and testing, we use the same setting as TITer. For
the confidence module, we use k = 30 if the module
is in LowFER mode and a dropout rate of 0.2 if the
module is in TuckER mode. For reward fusion, we
search suitable for α
1
,α
2
and α
3
in range [0,1] and
use rule weight w
rule
∈ [0.01,0.5]. Our source code is
available at https://github.com/lnhutnam/CATTer.
4.2 Results and Discussion
Performance and Efficiency Comparison. The
experimental results evaluating the link prediction
performance of the proposed model compared to
baseline models are presented in Table 2. Overall,
our proposed model shows significant improvements
in performance compared to baseline models such as
TNTComplEx and xERTE. For comparison with the
TITer model, we re-ran the experiments using the
same hardware setup as our proposed model. The
reported results in the tables include those from the
original papers and the re-experimented results. In
our comparison, we focus on the re-experimented re-
sults.
For the ICEWS14 and ICEWS18 datasets, CAT-
Ter shows significant performance improvements
compared to models like TTransE, TA-DistMult, DE-
SimplE, and TNTComplEx, thanks to its high adapt-
ability, which allows it to handle unknown entities
in the data. Compared to other extrapolation mod-
els like RE-NET, xERTE, and TANGO, CATTer also
demonstrates improvements in MRR and Hit@k. In
comparison to TITer, the performance evaluation with
MLP for the policy network shows improved effi-
ciency over other methods.
For the YAGO and WIKI datasets, CATTer also
demonstrates significant improvements compared to
models like RE-NET and CyGNet. When compared
to the baseline TITer model, the policy network with
MLP continues to show notable performance across
all metrics. There are two primary reasons for this
phenomenon observed in the experiments on these
datasets: 1) The spline approximation of KAN is in-
sufficient to handle the complex characteristics of the
environment, and 2) KAN is not fully stable during
the learning process (based on the convergence anal-
ysis in Figure 2 and Figure 3).
Table 3 compares the number of trainable param-
eters between the proposed and baseline models. The
computational cost is also assessed using the MACs
(Multiply-Accumulate Operations) metric, represent-
ing the number of MACs. Based on the evaluation
results, our proposed model maintains computational
efficiency, requiring fewer trainable parameters and
reduced operations while preserving performance.
Convergence Study. To evaluate the convergence
speed of the proposed model, we assess the loss func-
tion values and the accumulated reward values of the
agent over each training epoch. The provided results
are illustrated in Figure 2 and Figure 3.
As shown in Figure 2, on the ICEWS14 and
YAGO datasets, the fluctuation in the loss function
remains relatively small for both the MLP and KAN
networks, with the error levels being comparable
across both methods. In contrast, the fluctuation am-
plitude in the loss function for the ICEWS18 and
WIKI datasets is more significant, indicating instabil-
ity during training on these datasets for both the KAN
and MLP networks.
Regarding Figure 3, it is evident that for the
YAGO and WIKI datasets, the model’s performance
on both KAN and MLP networks converges rapidly
within approximately 100 epochs. On the other hand,
for the ICEWS14 and ICEWS18 datasets, the model
performance significantly improves after around 100
epochs and continues to increase slowly. Although
the evaluation was conducted for 400 epochs, we be-
lieve the model’s performance on these datasets has
not yet fully converged and could improve further
with additional training.
The Effect of LSTM and GRU for Historical Path
Encoding. To assess the impact of deep learning
techniques, specifically sequence-based architectures
such as LSTM and GRU, on history path encoding,
we evaluated their performance using the MRR met-
ric across multiple datasets. The provided experimen-
tal results are illustrated in Figure 4.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
74
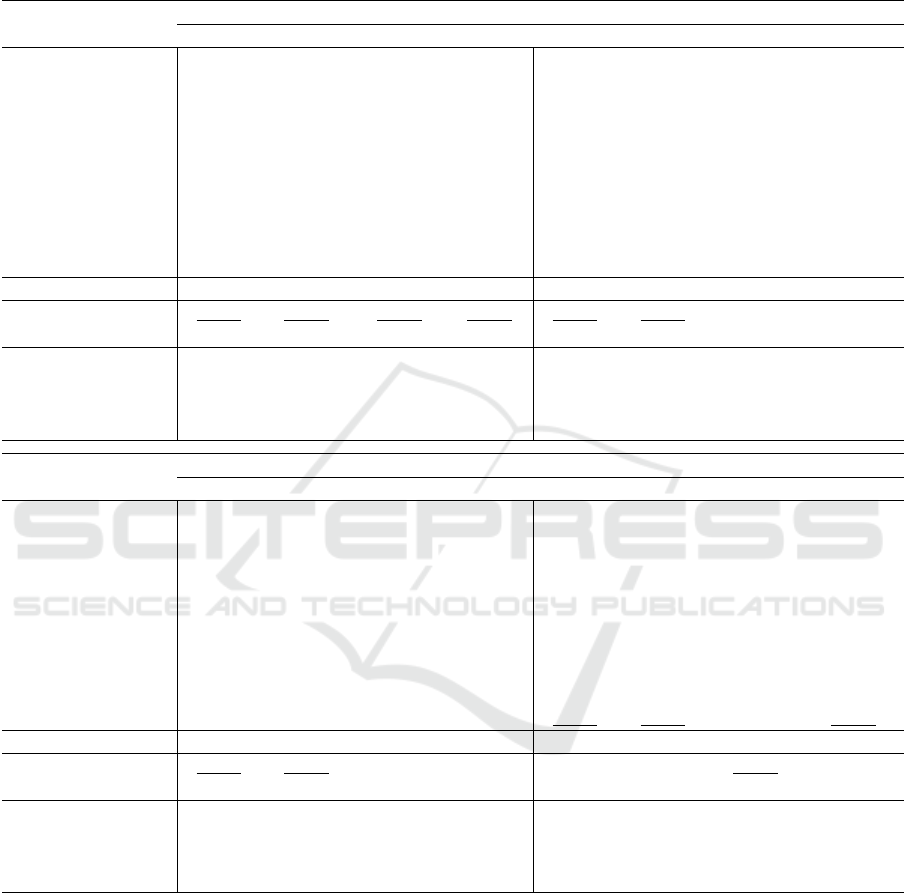
Table 2: Performance comparison results on future link forecasting on ICEWS14 and ICEWS18. These results of MRR and
Hits@1/3/10 are multiplied by 100.
∗
denotes the re-experiment result on the same hardware with the proposed model. APG
and RPG are calculated by APG = R
ours
− R
baseline
and RPG = (R
ours
− R
baseline
)/R
baseline
where R
ours
and R
baseline
are the
results of our models and baseline TITer
∗
, respectively.
Method
ICEWS14 ICEWS18
MRR ↑ Hit@1 ↑ Hit@3 ↑ Hit@10 MRR ↑ Hit@1 ↑ Hit@3 ↑ Hit@10 ↑
TTransE 13.43 3.11 17.32 34.55 8.31 1.92 8.56 21.89
TA-DistMult 26.47 17.09 30.22 45.41 16.75 8.61 18.41 33.59
DE-SimplE 32.67 24.43 35.69 49.11 19.30 11.53 21.86 34.80
TNTComplEx 32.12 23.35 36.03 49.13 27.54 19.52 30.80 42.86
CyGNet 32.73 23.69 36.31 50.67 24.93 15.90 28.28 42.61
RE-NET 38.28 28.68 41.34 54.52 28.81 19.05 32.44 47.51
xERTE 40.79 32.70 45.67 57.30 29.31 21.03 33.51 46.48
TANGO-Tucker – – – – 28.68 19.35 32.17 47.04
TANGO-DistMult – – – – 26.75 17.92 30.08 44.09
TITer 41.73 32.74 46.46 58.44 29.98 22.05 33.46 44.83
TITer* 40.33 31.00 45.30 57.71 29.42 21.63 32.83 43.96
CATTer-MLP 41.21 32.47 45.75 57.37 29.54 21.60 32.99 44.51
CATTer-KAN 40.13 31.04 44.80 57.19 29.11 21.37 32.46 43.60
APG (%) ↑ (MLP) 0.62 0.54 0.61 0.64 -0.22 -0.39 -0.02 0.03
RPG (%) ↑ (MLP) 2.18 4.74 0.99 -0.59 0.41 -0.14 0.49 1.25
APG (%) ↑ (KAN) 0.65 0.48 0.77 0.92 -0.61 -0.68 -0.54 -0.53
RPG (%) ↑ (KAN) -0.49 0.13 -1.10 -0.90 -1.05 -1.20 -1.13 -0.82
Method
WIKI YAGO
MRR ↑ Hit@1 ↑ Hit@3 ↑ Hit@10 MRR ↑ Hit@1 ↑ Hit@3 ↑ Hit@10 ↑
TTransE 29.27 21.67 34.43 42.39 31.19 18.12 40.91 51.21
TA-DistMult
44.53 39.92 48.73 51.71 54.92 48.15 59.61 66.71
DE-SimplE 45.43 42.6 47.71 49.55 54.91 51.64 57.30 60.17
TNTComplEx 45.03 40.04 49.31 52.03 57.98 52.92 61.33 66.69
CyGNet 33.89 29.06 36.10 41.86 52.07 45.36 56.12 63.77
RE-NET 49.66 46.88 51.19 53.48 58.02 53.06 61.08 66.29
xERTE 71.14 68.05 76.11 79.01 84.19 80.09 88.02 89.78
TANGO-Tucker 50.43 48.52 51.47 53.58 57.83 53.05 60.78 65.85
TANGO-DistMult 51.15 49.66 52.16 53.35 62.70 59.18 60.31 67.90
TITer 75.50 72.96 77.49 79.02 87.47 84.89 89.96 90.27
TITer* 73.56 71.48 74.86 76.40 87.80 85.52 89.92 90.31
CATTer-MLP 74.18 72.02 75.47 77.04 87.58 85.13 89.90 90.34
CATTer-KAN 74.21 71.96 75.63 77.32 87.19 84.84 89.38 89.78
APG (%) ↑ (MLP) 0.88 1.47 0.45 -0.34 0.12 -0.03 0.16 0.55
RPG (%) ↑ (MLP) 0.84 0.76 0.81 0.83 -0.25 -0.46 -0.02 0.03
APG (%) ↑ (KAN) -0.2 0.04 -0.5 -0.52 -0.31 -0.26 -0.37 -0.36
RPG (%) ↑ (KAN) 0.88 0.67 1.03 1.20 -0.69 -0.80 -0.60 -0.59
Based on the results, we observe that the per-
formance gap between LSTM and GRU is not sig-
nificant. LSTM shows a slight advantage on the
ICEWS14 and ICEWS18 datasets, with the difference
being more pronounced on the WIKI dataset. This
observation argues that LSTM may be more effective
in tasks with more complex data. However, on the
YAGO dataset, GRU marginally outperforms LSTM.
This indicates that GRU may be more suitable for
tasks with smaller and simpler data. Overall, the per-
formance difference between the two models remains
relatively small, suggesting that both LSTM and GRU
are viable options for history path encoding.
The Effect of MLP and KAN for Policy Net-
works. The MLP and KAN models were employed
in designing policy networks, a critical component of
the RL framework for link prediction on knowledge
graphs. We conducted experiments to evaluate the im-
pact of these two models on the MRR metric across
different evaluation datasets. The experimental re-
Improving Temporal Knowledge Graph Forecasting via Multi-Rewards Mechanism and Confidence-Guided Tensor Decomposition
Reinforcement Learning
75
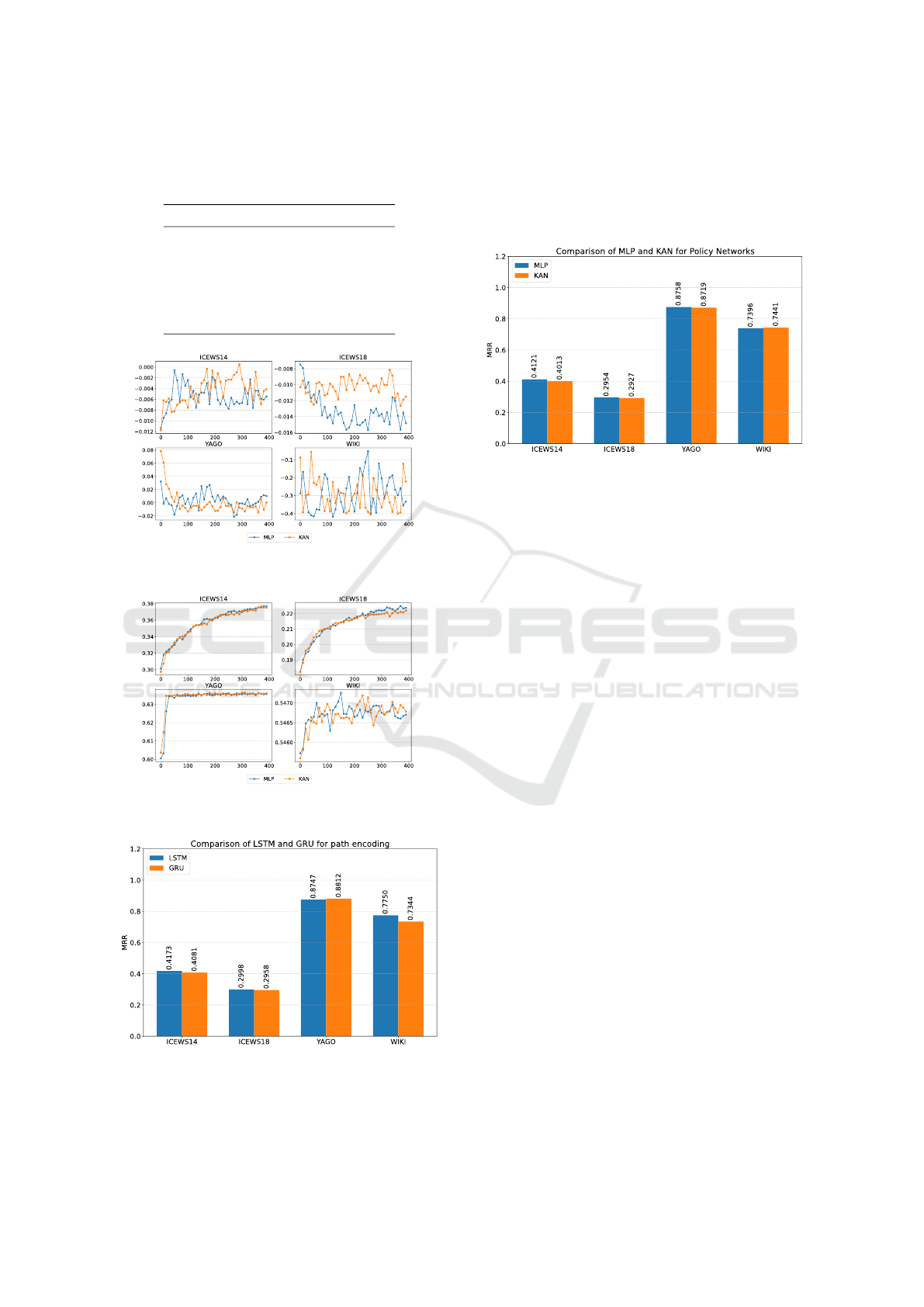
Table 3: Number of trainable parameters and calculation of
our proposed models and baselines. MACs stand for Multi-
Adds operations, and M stand for million.
Method # Params # MACs
RE-NET 5.459M 4.370M
CyGNet 8.568M 8.554M
xERTE 2.927M 225.895M
TITer 1.455M 0.225M
CATTer 1.425M 0.220M
Figure 2: The change of the loss function over each epoch
with MLP and KAN Policy Network.
Figure 3: The change of the multi-reward function over
each epoch with MLP and KAN Policy Network.
Figure 4: The effect of LSTM and GRU for path encoding
on ICEWS14, ICEWS18, YAGO and WIKI dataset in term
of MRR.
sults are illustrated in Figure 5. The results indicate
that the MLP model performs slightly better on the
ICEWS14, ICEWS18, and YAGO datasets. However,
the KAN network achieves better training results for
the WIKI dataset than the MLP network.
Figure 5: The effect of MLP and KAN for Policy Networks
on ICEWS14, ICEWS18, YAGO and WIKI dataset in term
of MRR.
The Effect of Tensor Decomposition Methods for
Action Confidence Generation. The action confi-
dence generation module is designed based on tensor
decomposition models. Recent studies have demon-
strated the significantly improved performance of
these models in the link prediction task. We exper-
imented with three tensor decomposition models to
evaluate their ability to enhance action selectivity:
TuckER, ComplEx, and LowFER. The experimental
results are illustrated in Figure 6 with MLP-Policy
Networks and Figure 7 with KAN-Policy Networks.
Overall, using LowFER to generate confidence proba-
bilities for action selection had a positive impact com-
pared to ComplEx and TuckER. LowFER general-
izes TuckER and is better able to fuse information
between entities and relations than ComplEx. As a
result, the probabilities generated by this module led
to significantly improved performance.
4.3 Ablation Study
In this section, we perform some ablation experiments
to evaluate the impact of modules such as action con-
fidence generation, multi-rewards, and multi-reward
reshaping on the agent’s learning performance.
The Effect of Using Action Confidence Generation.
To evaluate the role of the action confidence genera-
tion module, we conducted an experiment comparing
two scenarios: with and without using this module.
The experimental results are shown in Figure 8. As
demonstrated in Figure 8, the action confidence gen-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
76
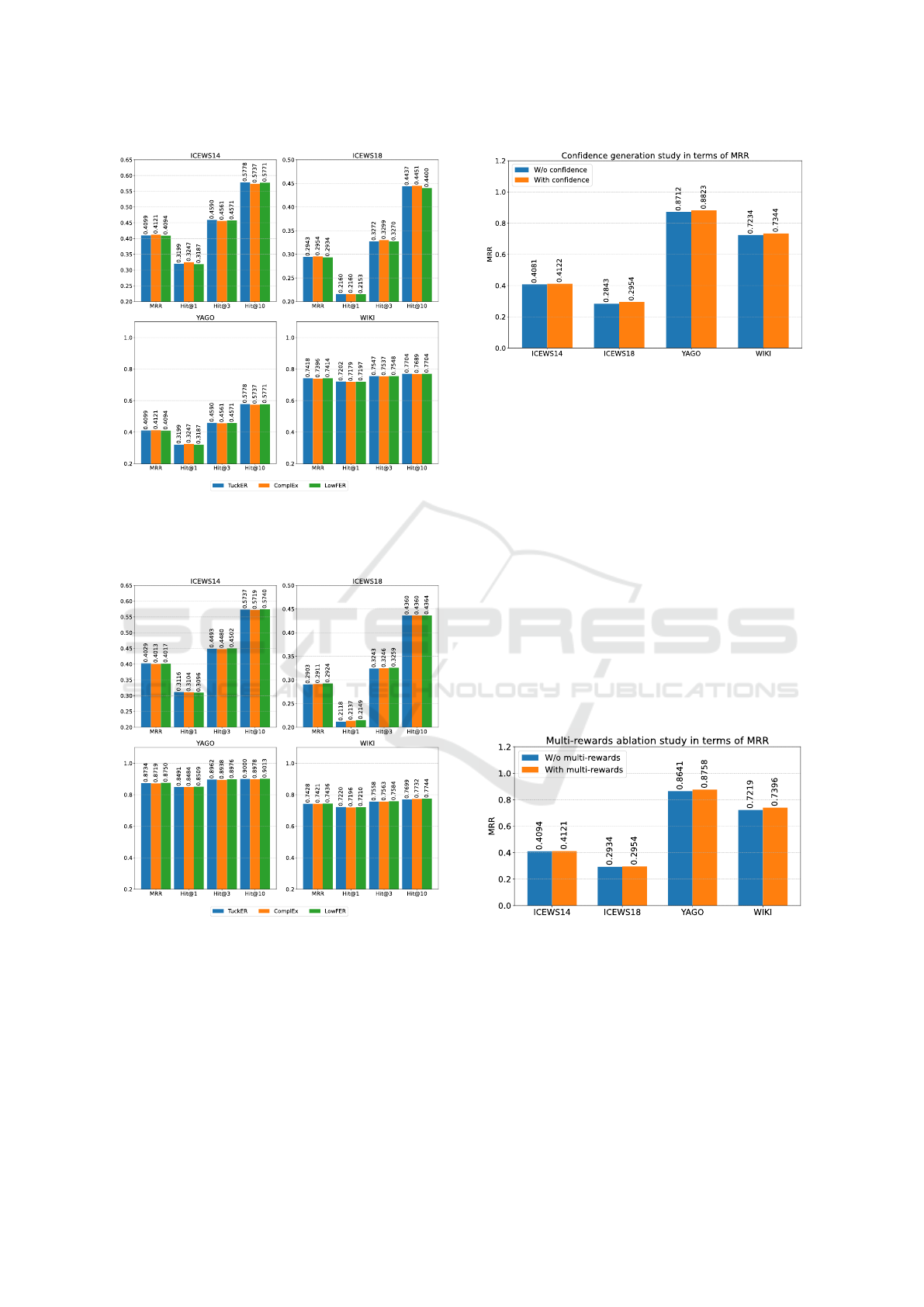
Figure 6: The effect of different tensor decomposition
methods with MLP-Policy Network for action confidence
generation on ICEWS14, ICEWS18, YAGO, and WIKI
dataset.
Figure 7: The effect of different tensor decomposition
methods with KAN-Policy Network for action confidence
generation on ICEWS14, ICEWS18, YAGO, and WIKI
dataset.
eration module was effective across all four evalua-
tion datasets. By incorporating the confidence rate
into the action selection and previous steps for anal-
ysis, the agent can identify better and more reliable
actions to interact with the environment. Thus, it ulti-
mately enhances the reasoning ability of an agent.
Figure 8: The effect of using action confidence for
agent learning on ICEWS14, ICEWS18, YAGO and WIKI
dataset.
The Effect of Multi-Rewards. The multi-reward
function is a crucial component of the RL frame-
work. In this ablation study, we examine the impact
of the multi-reward function on the agent’s learning
process by considering two scenarios: 1) using only a
binary reward function, and 2) employing the multi-
reward function with the criteria introduced in Sec-
tion 3. The experimental results are illustrated in
Figure 9. We observe that when using the standard
binary reward function, the performance difference
compared to the multi-reward function is insignificant
for the ICEWS14 and ICEWS18 datasets. However,
providing additional rewards for the YAGO and WIKI
datasets allows the agent to gain a more comprehen-
sive understanding of the learning environment and
further optimize its strategy.
Figure 9: The effect of multi-reward mechanism for
agent learning on ICEWS14, ICEWS18, YAGO and WIKI
dataset.
The Effect of Multi-Reward Reshaping. Based on
TITer (Sun et al., 2021), we applied a strategy to re-
shape the initial distribution of the multi-reward using
Dirichlet distributions. To assess the effectiveness of
this strategy, we conducted experiments in two sce-
narios: 1) using multi-reward reshaping and 2) not
Improving Temporal Knowledge Graph Forecasting via Multi-Rewards Mechanism and Confidence-Guided Tensor Decomposition
Reinforcement Learning
77
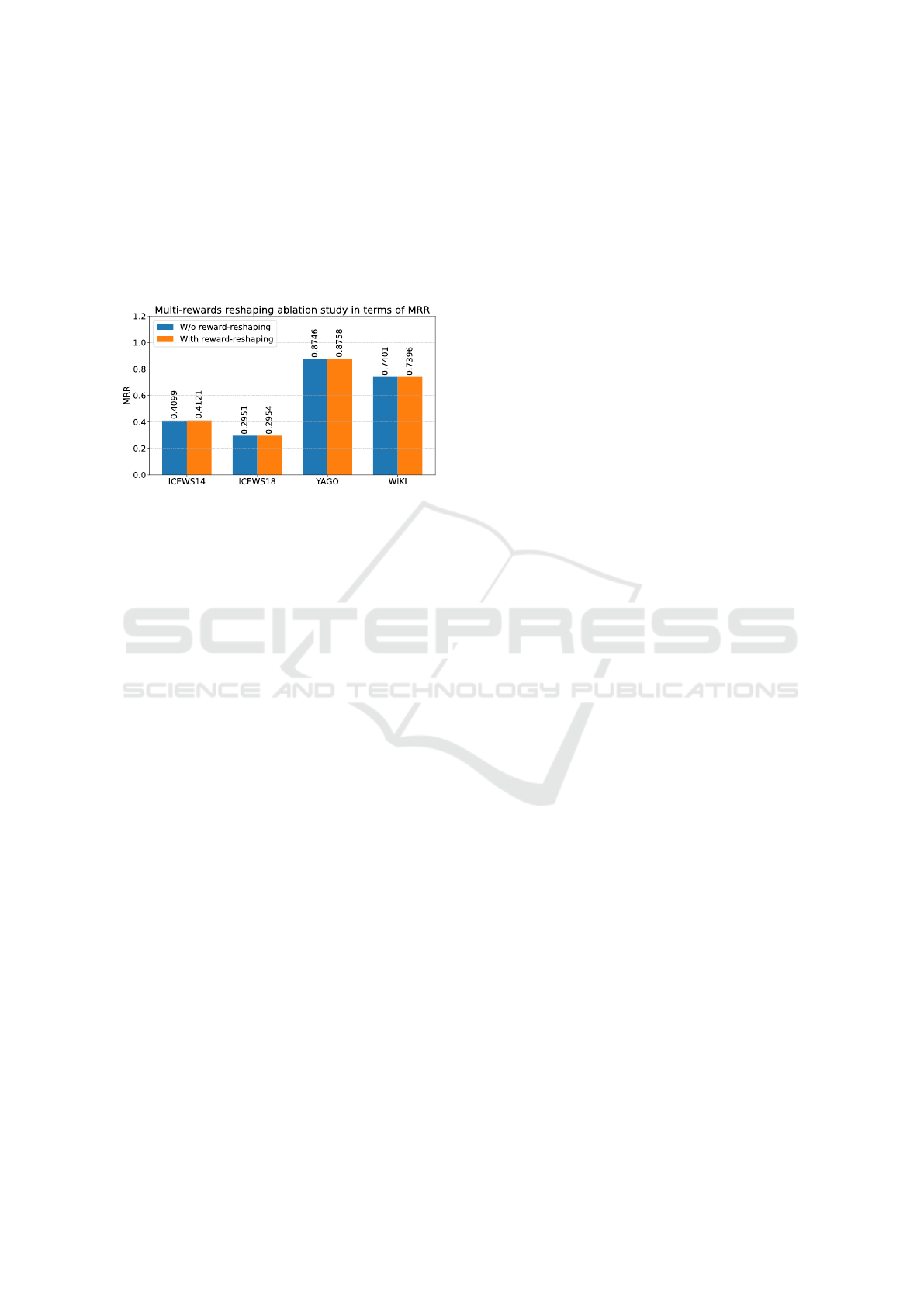
using reshaping for the original multi-reward distribu-
tion. The experimental results are visualized in Fig-
ure 10. The results indicate that reshaping the distri-
bution yields improvements across most experimental
datasets. This demonstrates that distribution reshap-
ing enables the agent to receive better rewards within
the multi-reward module, allowing it to make more
informed decisions in complex environments.
Figure 10: The effect of multi-reward reshaping for
agent learning on ICEWS14, ICEWS18, YAGO and WIKI
dataset.
5 CONCLUSION
In this work, we propose strategies for a new model
to improve the temporal-path-based reinforcement
learning model based on the TimeTraveler frame-
work, namely CATTer. These strategies include em-
ploying GRU to encode historical paths; integrat-
ing confidence probability into MLP and KAN lay-
ers, thereby designing a more flexible Policy Net-
work capable of selecting appropriate actions for
the agent during learning; and utilizing a multi-
reward function with various reward criteria to en-
hance the agent’s adaptability in Temporal Knowl-
edge Graphs (TKG) environment. The experimen-
tal results demonstrate that these enhancements posi-
tively impact the model’s performance in future link
prediction. Looking ahead, we plan to incorporate in-
formative sub-graph patterns and temporal rules into
the model to further enhance its link prediction capa-
bilities.
ACKNOWLEDGEMENTS
This research is partially funded by the Vingroup In-
novation Foundation (VINIF) under the grant number
VINIF.2021.JM01.N2
REFERENCES
Amin, S., Varanasi, S., Dunfield, K. A., and Neumann, G.
(2020). Lowfer: Low-rank bilinear pooling for link
prediction. In International Conference on Machine
Learning, pages 257–268. PMLR.
Bai, L., Chai, D., and Zhu, L. (2023). Rlat: Multi-hop tem-
poral knowledge graph reasoning based on reinforce-
ment learning and attention mechanism. Knowledge-
Based Systems, 269:110514.
Bai, L., Yu, W., Chen, M., and Ma, X. (2021). Multi-hop
reasoning over paths in temporal knowledge graphs
using reinforcement learning. Applied Soft Comput-
ing, 103:107144.
Bala
ˇ
zevi
´
c, I., Allen, C., and Hospedales, T. M. (2019).
Tucker: Tensor factorization for knowledge graph
completion. arXiv preprint arXiv:1901.09590.
Bordes, A., Usunier, N., Garcia-Duran, A., Weston, J., and
Yakhnenko, O. (2013). Translating embeddings for
modeling multi-relational data. Advances in neural
information processing systems, 26.
Boschee, E., Lautenschlager, J., O’Brien, S., Shellman, S.,
Starz, J., and Ward, M. (2015). ICEWS Coded Event
Data.
Chen, W., Wan, H., Guo, S., Huang, H., Zheng, S., Li, J.,
Lin, S., and Lin, Y. (2022). Building and exploiting
spatial–temporal knowledge graph for next poi recom-
mendation. Knowledge-Based Systems, 258:109951.
Das, R., Dhuliawala, S., Zaheer, M., Vilnis, L., Durugkar,
I., Krishnamurthy, A., Smola, A., and McCallum, A.
(2017). Go for a walk and arrive at the answer: Rea-
soning over paths in knowledge bases using reinforce-
ment learning. arXiv preprint arXiv:1711.05851.
Dettmers, T., Minervini, P., Stenetorp, P., and Riedel, S.
(2018). Convolutional 2d knowledge graph embed-
dings. In Proceedings of the AAAI conference on arti-
ficial intelligence.
Ding, Z., Han, Z., Ma, Y., and Tresp, V. (2021). Temporal
knowledge graph forecasting with neural ode. arXiv
preprint arXiv:2101.05151.
Duchi, J., Hazan, E., and Singer, Y. (2011). Adaptive sub-
gradient methods for online learning and stochastic
optimization. Journal of machine learning research,
12(7).
Garc
´
ıa-Dur
´
an, A., Dumancic, S., and Niepert, M. (2018).
Learning sequence encoders for temporal knowledge
graph completion. In Proceedings of the 2018 Con-
ference on Empirical Methods in Natural Language
Processing, pages 4816–4821.
Goel, R., Kazemi, S. M., Brubaker, M., and Poupart, P.
(2020). Diachronic embedding for temporal knowl-
edge graph completion. In Thirty-Fourth AAAI Con-
ference on Artificial Intelligence, pages 3988–3995.
Han, Z., Chen, P., Ma, Y., and Tresp, V. (2021a). Explain-
able subgraph reasoning for forecasting on temporal
knowledge graphs. In International Conference on
Learning Representations.
Han, Z., Ding, Z., Ma, Y., Gu, Y., and Tresp, V. (2021b).
Temporal knowledge graph forecasting with neural
ode. arXiv preprint arXiv:2101.05151.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
78

Han, Z., Ma, Y., Wang, Y., G
¨
unnemann, S., and Tresp, V.
(2020). Graph hawkes neural network for forecasting
on temporal knowledge graphs. In Conference on Au-
tomated Knowledge Base Construction.
Jin, W., Qu, M., Jin, X., and Ren, X. (2019). Recur-
rent event network: Autoregressive structure infer-
ence over temporal knowledge graphs. arXiv preprint
arXiv:1904.05530.
Jin, W., Qu, M., Jin, X., and Ren, X. (2020). Recur-
rent event network: Autoregressive structure inference
over temporal knowledge graphs. In Proceedings of
the 2020 Conference on Empirical Methods in Natu-
ral Language Processing, pages 6669–6683.
Johnson, N. L., Kotz, S., and Balakrishnan, N. (1972). Con-
tinuous multivariate distributions, volume 7. Wiley
New York.
Kingma, D. P. (2014). Adam: A method for stochastic op-
timization. arXiv preprint arXiv:1412.6980.
Lacroix, T., Obozinski, G., and Usunier, N. (2020). Tensor
decompositions for temporal knowledge base comple-
tion. In International Conference on Learning Repre-
sentations.
Leblay, J. and Chekol, M. W. (2018a). Deriving validity
time in knowledge graph. In Companion Proceedings
of the The Web Conference 2018, pages 1771–1776.
Leblay, J. and Chekol, M. W. (2018b). Deriving validity
time in knowledge graph. In Companion Proceedings
of the The Web Conference, pages 1771–1776.
Lin, X. V., Socher, R., and Xiong, C. (2018). Multi-
hop knowledge graph reasoning with reward shaping.
arXiv preprint arXiv:1808.10568.
Liu, Z., Wang, Y., Vaidya, S., Ruehle, F., Halverson, J.,
Solja
ˇ
ci
´
c, M., Hou, T. Y., and Tegmark, M. (2024).
Kan: Kolmogorov-arnold networks. arXiv preprint
arXiv:2404.19756.
Mahdisoltani, F., Biega, J., and Suchanek, F. M.
(2013). Yago3: A knowledge base from multilingual
wikipedias. In CIDR.
Mahdisoltani, F., Biega, J., and Suchanek, F. M. (2015).
YAGO3: A knowledge base from multilingual
wikipedias. In Seventh Biennial Conference on Inno-
vative Data Systems Research.
Mavromatis, C., Subramanyam, P. L., Ioannidis, V. N.,
Adeshina, A., Howard, P. R., Grinberg, T., Hakim, N.,
and Karypis, G. (2022). Tempoqr: temporal question
reasoning over knowledge graphs. In Proceedings of
the AAAI conference on artificial intelligence, pages
5825–5833.
Ng, K. W., Tian, G.-L., and Tang, M.-L. (2011). Dirichlet
and related distributions: Theory, methods and appli-
cations.
Ruder, S. (2016). An overview of gradient de-
scent optimization algorithms. arXiv preprint
arXiv:1609.04747.
Schlichtkrull, M., Kipf, T. N., Bloem, P., Van Den Berg,
R., Titov, I., and Welling, M. (2018). Modeling rela-
tional data with graph convolutional networks. In The
semantic web: 15th international conference, ESWC
2018, Heraklion, Crete, Greece, June 3–7, 2018, pro-
ceedings 15, pages 593–607. Springer.
Sun, H., Zhong, J., Ma, Y., Han, Z., and He, K. (2021).
Timetraveler: Reinforcement learning for temporal
knowledge graph forecasting. In Proceedings of the
2021 Conference on Empirical Methods in Natural
Language Processing, pages 8306–8319.
Tao, Y., Li, Y., and Wu, Z. (2021). Temporal link predic-
tion via reinforcement learning. In ICASSP 2021-2021
IEEE International Conference on Acoustics, Speech
and Signal Processing (ICASSP), pages 3470–3474.
IEEE.
Trouillon, T., Welbl, J., Riedel, S., Gaussier,
´
E., and
Bouchard, G. (2016). Complex embeddings for sim-
ple link prediction. In International conference on ma-
chine learning, pages 2071–2080. PMLR.
Tucker, L. R. et al. (1964). The extension of factor anal-
ysis to three-dimensional matrices. Contributions to
mathematical psychology, 110119:110–182.
Wang, J., Wu, R., Wu, Y., Zhang, F., Zhang, S., and Guo,
K. (2024). Mpnet: temporal knowledge graph com-
pletion based on a multi-policy network. Applied In-
telligence, 54(3):2491–2507.
Williams, R. J. (1992). Simple statistical gradient-following
algorithms for connectionist reinforcement learning.
Machine Learning, 8:229–256.
Xiong, W., Hoang, T., and Wang, W. Y. (2017). Deep-
path: A reinforcement learning method for knowledge
graph reasoning. arXiv preprint arXiv:1707.06690.
Zheng, S., Yin, H., Chen, T., Nguyen, Q. V. H., Chen,
W., and Zhao, L. (2023). Dream: Adaptive rein-
forcement learning based on attention mechanism for
temporal knowledge graph reasoning. arXiv preprint
arXiv:2304.03984.
Zhu, C., Chen, M., Fan, C., Cheng, G., and Zhang, Y.
(2021a). Learning from history: Modeling tempo-
ral knowledge graphs with sequential copy-generation
networks. In Proceedings of the AAAI conference on
artificial intelligence, pages 4732–4740.
Zhu, C., Chen, M., Fan, C., Cheng, G., and Zhang, Y.
(2021b). Learning from history: Modeling tempo-
ral knowledge graphs with sequential copy-generation
networks. In Thirty-Fifth AAAI Conference on Artifi-
cial Intelligence, pages 4732–4740.
Improving Temporal Knowledge Graph Forecasting via Multi-Rewards Mechanism and Confidence-Guided Tensor Decomposition
Reinforcement Learning
79
