
Integration of Aggregated Information and Subjective Experience
Through Sequential Information Presentation
Yoshimasa Ohmoto and Hiroki Yamamoto
Shizuoka University, Hamamatsu, Shizuoka, Japan
Keywords:
Agent, Pedestorian Navigation, Guidance, Sequential Presentations.
Abstract:
Often, when following a pedestrian navigation system, individuals do not remember the route taken or the
buildings passed upon arriving at their destination. We hypothesized that by integrating sparsely aggregated
information from the problem space into the context of the user’s subjective experience, the problem space
could be more comprehensively understood from the periphery of the subjective experience. In this study, we
tested this hypothesis using pedestrian navigation. Specifically, we proposed a method for mapping aggregated
information to subjective experience by incorporating landmarks around the user into the route guidance by
a guide agent and sequentially presenting information even at non-decisive points that do not prompt a route
change. Experimental results indicated significant differences in ”information organization” and ”understand-
ing of urban space” in questionnaires. Significant differences were also observed in route memory. The results
suggest that the proposed method facilitates the integration of aggregated information to subjective experience.
1 INTRODUCTION
The widespread adoption of smartphones has made
pedestrian navigation systems indispensable in daily
life. However, conventional systems primarily focus
on delivering route and distance information, often
leading users to passively follow instructions with a
sense of anxiety (Ishikawa et al., 2008; M
¨
unzer et al.,
2006). This passive reliance can hinder indepen-
dent information-seeking behavior and negatively im-
pact spatial comprehension and route memory (Willis
et al., 2009; Huang et al., 2012). The limited field of
view offered by the systems and the reduced attention
to the surrounding environment contribute to this.
To address these issues, researchers have pro-
posed incorporating landmarks into navigation guid-
ance (May et al., 2003; Raubal and Winter, 2002).
Landmarks serve as crucial directional cues in spa-
tial navigation and play a significant role in human
spatial perception (Sorrows and Hirtle, 1999; Caduff
and Timpf, 2008). Studies have shown that includ-
ing landmark information increases user confidence
and improves adherence to the suggested path (Ross
et al., 2004). Moreover, human spatial cognition re-
lies on three types of spatial knowledge: landmarks,
routes, and distance perception (Siegel, 1975; Mon-
tello, 1998). While existing navigation systems pro-
vide route and distance information, the proper inte-
gration of landmark information may enhance mem-
ory of urban environments (Richter and Winter, 2014;
Schwering et al., 2013). However, current approaches
typically provide landmark information only at de-
cision points, such as intersections, neglecting the
user’s experience in areas where no action choices are
required. This approach, while effective in utilizing
landmarks as directional cues, may compromise the
user’s subjective experience in environments with few
behavioral changes, such as long straight roads.
To address this limitation, we propose a novel nav-
igation system that sequentially presents information
about the surrounding environment along the entire
route, including locations without action decisions.
This system aims to closely correlate the user’s sub-
jective experience with the aggregated navigation in-
formation. Specifically, it provides route guidance
alongside sequential presentation of information on
nearby landmarks and route conditions, thereby en-
riching the subjective experience by adding contex-
tually relevant information throughout the navigation
process. An embodied agent is consistently displayed
in the system, offering a degree of empathy and sim-
ulating the experience of walking alongside the user.
This study aims to verify whether the proposed
system improves the integration of aggregated infor-
mation from the navigation system with the user’s
subjective experience through sequential information
412
Ohmoto, Y. and Yamamoto, H.
Integration of Aggregated Information and Subjective Experience Through Sequential Information Presentation.
DOI: 10.5220/0013161600003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 412-419
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

presentation. We will evaluate the impact of our
method on users’ ability to grasp geospatial informa-
tion, analyze its effect on route memory, and inves-
tigate its influence on users’ subjective impressions.
By facilitating the integration of aggregated informa-
tion into subjective experience, our approach seeks
to enable a more comprehensive understanding of the
problem space from the periphery of the user’s expe-
rience. This research contributes to the development
of more effective and user-friendly pedestrian naviga-
tion systems and demonstrates how mapping aggre-
gate information to subjective experience can enhance
overall spatial comprehension.
2 RELATED WORKS
Previous research has extensively investigated the im-
pact of mobile navigation systems on spatial mem-
ory and cognition. Studies comparing mobile device-
based navigation with traditional map-based route
finding have consistently shown that the use of nav-
igation systems affects spatial memory and under-
standing (Ishikawa et al., 2008; M
¨
unzer et al., 2006).
Ishikawa et al. (2006) found that users of navigation
systems tend to develop a bias towards visual mem-
ory at the expense of spatial comprehension (Ishikawa
and Montello, 2006). Similarly, Munzer et al. (2012)
highlighted that navigation systems may impede the
formation of cognitive maps (M
¨
unzer et al., 2012),
while Willis et al. (2009) demonstrated that mobile
maps led to decreased acquisition of spatial knowl-
edge compared to paper maps (Willis et al., 2009).
Landmarks play a crucial role in pedestrian nav-
igation and spatial cognition. May et al. (2003)
emphasized that landmarks serve as reference points
in urban environments, aiding in spatial organiza-
tion and route selection (May et al., 2003). Sorrows
& Hirtle (1999) noted that landmarks contribute not
only as directional cues but also to the formation of
spatial memory (Sorrows and Hirtle, 1999). Caduff
& Timpf (2008) further demonstrated that the pres-
ence of landmarks improves path reconstruction per-
formance (Caduff and Timpf, 2008).
The effectiveness of landmarks depends on their
distinctiveness and informational value. Stankiewicz
& Kalia (2007) pointed out that objects serving as
landmarks need to have a distinctive appearance and
provide useful information (Stankiewicz and Kalia,
2007). Richter & Winter (2014) found that physical
characteristics such as size, shape, and color influence
landmark retention (Richter and Winter, 2014). In-
terestingly, Janzen & van Turennout (2004) showed
that objects near decision points are remembered for
longer periods, highlighting the importance of context
in spatial memory (Janzen and Van Turennout, 2004).
The role of context in memory formation and re-
call is well-established in cognitive psychology. Tulv-
ing & Thomson’s (1973) encoding specificity princi-
ple demonstrates that context during learning serves
as a memory cue (Tulving and Thomson, 1973).
Smith & Vela’s (2001) meta-analysis confirms the in-
fluence of environmental context on memory repro-
duction (Smith and Vela, 2001). Barsalou (2008)
emphasizes that knowledge acquisition and use are
closely related to specific situations and contexts
(Barsalou, 2008). These theories are applicable to the
formation and recall of spatial memory in navigation.
While previous studies have primarily focused on
the effects of landmarks at decision points (Rehrl
et al., 2010; Anacta et al., 2017), our study proposes
a novel approach that promotes the integration of the
user’s subjective experience with aggregated informa-
tion. By sequentially presenting information about
the surrounding environment at all points, including
those that do not require action decisions, we aim to
address the assistance dilemma and enhance overall
spatial comprehension. This approach extends the
concept of ”user-centered spatial information provi-
sion” proposed by (Schwering et al., 2013) and builds
upon the importance of landmark information in nav-
igation instructions, as highlighted by (Anacta et al.,
2017). Our method seeks to provide more compre-
hensive information by mapping aggregated data to
the user’s subjective experience, potentially facili-
tating a more holistic understanding of the problem
space from the periphery of the user’s experience.
In this study, we investigate whether our proposed
method can seamlessly integrate subjective experi-
ence and aggregated information, as well as exam-
ine the secondary effects of this integration on ex-
perimental participants. By doing so, we aim to
contribute to the development of more effective and
user-friendly pedestrian navigation that enhance spa-
tial cognition and memory formation.
3 SEQUENTIAL INFORMATION
PRESENTATION
This study proposes an extension to conventional nav-
igation systems, addressing the effective and user-
friendly pedestrian navigation by integrating aggre-
gated information with users’ subjective experiences.
Our approach goes beyond using landmarks solely
as directional cues, instead providing sequential in-
formation about surrounding buildings and the envi-
ronment at multiple points along the route, includ-
Integration of Aggregated Information and Subjective Experience Through Sequential Information Presentation
413

ing those not requiring action decisions. This method
aims to promote a comprehensive understanding of
the problem space by effectively mapping aggregated
information to the user’s subjective experience. In or-
der to provide a certain degree of empathy, an embod-
ied agent is always displayed in the navigation system
and acts as if it is walking with the user.
Our hypothesis states: ”Contextual and sequen-
tial presentation of information improves geospatial
grasp, positively impacts memory retention and infor-
mation integration of routes traversed, and enhances
subjective impressions of navigation.”
The proposed system builds upon previous re-
search that primarily focused on using objects near
decision points as landmarks. While these methods
effectively utilize landmarks as directional cues, our
approach extends this concept in two key ways:
Information Provision at Non-Decision Points
We sequentially present supplementary peripheral
information at points not requiring action deci-
sions.
Continuous Environmental Understanding
We provide context-sensitive information about
the surrounding environment to support ongoing
geospatial understanding and increase user confi-
dence in the navigation system.
Our method focuses on contextual information in
the user’s vicinity, successively presenting engaging
information such as names, characteristics, and his-
torical backgrounds. To enhance the usefulness of
these objects, we also provide information related to
user attributes and destinations. This information is
delivered in the most appropriate format (text, im-
ages, or audio) based on the user’s situation and pref-
erences. An Embodied Conversational Agent, con-
stantly displayed in the navigation system, presents
general walking behavior and peripheral information-
seeking actions, offering a degree of empathy and
simulating the experience of walking alongside the
user. The examples of decision point navigation (De-
cision Navi.) and sequential presentation navigation
(Sequential Navi.) are shown in Figure 1.
To verify the effectiveness of our approach, we
will conduct pedestrian navigation experiments using
the developed system. Participants will be divided
into two groups: one using a conventional naviga-
tion system and the other using our proposed system.
We will analyze and compare both groups’ geospa-
tial comprehension, route memory, and subjective im-
pressions of navigation post-experiment. Specifically,
we aim to verify that: Spatial comprehension is im-
proved by incorporating virtual city environment ob-
jects into navigation and presenting information se-
quentially and contextually. Sequential information
Let's go for the
tower!
Let's go for the
tower!
The shop famous for
their cakes. There
are lots of people.
Cyclists coming out of
the school at dismissal
time are dangerous.
Decision Navi.
Sequential Navi.
・・・・・・
Figure 1: The examples of decision point navigation and
sequential presentation navigation.
presentation is effective in consolidating route mem-
ory and reducing mental workload during navigation.
This methodology aligns with the study’s over-
all goal of investigating whether the proposed sys-
tem can seamlessly integrate subjective experience
and aggregated information, as well as examining the
secondary effects of this integration. We address the
limitations of previous studies that focused primar-
ily on landmark effects at decision points, extending
the concept of user-centered spatial information pro-
vision and potentially enhancing overall spatial cogni-
tion and memory formation in pedestrian navigation.
4 EXPERIMENT
To validate our hypothesis that integrating contextual
objects and presenting sequential information in a vir-
tual urban environment enhances geospatial compre-
hension and reduces mental workload, we conducted
a comparative experiment. This study aimed to ad-
dress the hypothesis by seamlessly integrating aggre-
gated information with users’ subjective experiences,
potentially facilitating a more comprehensive under-
standing of the problem space.
In this experiment, an immersive full-screen mon-
itor was used to simulate a walking situation by creat-
ing a virtual urban space on its screen. Participants
performed two experimental tasks: an action deci-
sion navigation task (DecisionNavi-Task) and a se-
quential information navigation task (SequentialNavi-
Task). In the DecisionNavi-Task, participants aimed
at the destination using voice guidance that presents
information at the point where action decisions are
required, as implemented in existing navigation ap-
plications. In the SequentialNavi-Task, participants
aimed at the destination using voice guidance that
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
414

Immersive display
Virtual space
projection PC
Display the virtual
space and navigation
Participant
Figure 2: The experimental setting.
presents information including nearby landmarks and
contextual information sequentially.
As a subjective measure, 7-point Likert scale
questionnaires were asked to participants after the
completion of each task to confirm the participant’s
impressions for the navigation agent. After both
tasks were completed, questionnaires were asked to
compare and evaluate subjective impressions in both
tasks. After the completion of each task, the partic-
ipants were shown the route they had taken and an
image of a certain intersection and asked to draw the
direction they should take as an objective measure of
their memory of the route and geospatial information.
4.1 Experimental Settings
Participants in the experiment stood on an omni-
directional treadmill placed in the center of an area
surrounded by an immersive full-screen monitor con-
sisting of 8 displays. Eight displays showed the urban
environment, mini-maps, etc. The walking simula-
tor presenting the urban environment was created in
unity. Navigation sounds and warnings when devi-
ating from the route guidance were output from the
speakers. Walking was controlled by a controller held
by the participant. However, they were instructed to
perform walking movements on the treadmill in ac-
cordance with the screen transitions. A schematic di-
agram of the experimental environment and the actual
experiment are shown in Figure 2.
4.2 Task
Participants in the experiment performed tasks to
navigate within a virtual urban environment using
two different navigation systems, respectively. In
the action-decision navigation, participants followed
a guide that directed them in the direction of travel
and voice navigation at the point where they needed
to make an action decision, and then traveled to the
designated destination. In the sequential information
navigation, in which sequential information was pre-
Figure 3: The map and route used in first task.
sented according to the participants’ context, the par-
ticipants moved to the designated destination follow-
ing voice guidance that presented sequential informa-
tion on nearby landmarks and contextual information
(names, features, history, non-player characters’ be-
havior, time etc.) in addition to the direction of travel.
The virtual city map used in each task was different,
and each had two transit points. Participants in the
experiment relied on the voice guidance and the mini-
map displayed on the screen to select a route to reach
the destination. In both conditions, the route search
took approximately 10 minutes. The map and route
used in first task is shown in Figure 3.
4.2.1 Navigation
The voice used for navigation was created using text-
to-speech software. The timing of the voice was set
so that the specified navigation voice would be played
when the participants passed a certain point. When
participants deviated from the route, they were noti-
fied that they had deviated from the route. The navi-
gation audio and the audio when the participant devi-
ated from the route were played at the same volume
from the speakers. The navigation features used in
each task were as follows.
Action Decision Navigation
Audio navigation is presented at the point where
an action decision is required while displaying the
direction of travel and distance. The navigation
voice is pre-created according to the task. In the
task, the navigation was presented approximately
once every 25 seconds.
Sequential Information Navigation
In addition to the audio of the action decision nav-
igation, information related to surrounding land-
marks is presented at points where no action deci-
sion is made. In addition, information about time
and the surrounding situation is presented accord-
ing to the context of the participant. The informa-
tion presented includes: ”There is an apparel store
Integration of Aggregated Information and Subjective Experience Through Sequential Information Presentation
415

on the right. It is a little expensive, but it seems
to be popular.” ”There is a cafe on the left side,
which seems to be crowded with young people.”
In the task, navigation is provided approximately
once every 15 seconds.
In this experimental setup, audio navigation in-
structions were systematically pre-recorded and de-
livered through an automated playback system. The
navigational content was dynamically determined
based on three key parameters: (1) the participant’s
current geographic coordinates on the designated task
map, (2) the cumulative time elapsed since task initi-
ation, and (3) the specific trajectory patterns observed
in the participant’s route selection. The temporal fre-
quency of navigational cues was modulated within a
predetermined range to maintain optimal information
delivery while avoiding cognitive overload.
4.3 Procedure
Participants first entered the experimental environ-
ment, surrounded by an immersive monitor, and prac-
ticed moving and navigating within the virtual space
for about five minutes. Participants were then pre-
sented with a picture showing the overall path they
would take in the task to see the path. At the same
time, they were informed that questions about the
path they had taken were prepared for them after each
task. After confirming that the participants under-
stood, the first task was performed, and after the task
was completed, the participants were asked to note on
a map the route they had taken during the task. Then,
they were presented with images of three intersec-
tions that they had actually passed, and were asked on
which direction they should go in order to reach their
destination. Afterwards, the participants were asked
to complete questionnaires regarding their subjective
impressions. After answering the questionnaires, the
participants took a short rest. After the rest, a sec-
ond task was performed, and after the task was com-
pleted, the participants were asked to note on a map
the route they had taken during the task. The partici-
pants were then presented with images of three inter-
sections that they had actually passed, and were asked
on which direction they should go in order to reach
their destination. Afterwards, the participants were
asked to complete questionnaires regarding their sub-
jective impressions. After informing the participants
that the all tasks had been completed, they asked to
answer questionnaires comparing the tasks.
Twenty-three university students (12 males and
11 females, mean age 20.7 years, SD 1.51) partici-
pated in the experiment. Each participant performed
two experimental tasks: an action decision navigation
Table 1: Results of subjective impression questionnaires
about SequentialNavi and DecisionNavi.
Item S. Navi (SD) D. Navi (SD) p-value
IO 4.3 (1.46) 3.57 (2.06) .015**
PF 4.78 (1.54) 5.65 (1.47) .041*
MW 2.52 (1.08) 3.26 (1.96) .060
DU 4.57 (1.47) 4.22 (2.04) .425
Uf 5.65 (1.11) 5.39 (1.62) .479
SE 5.26 (1.86) 2.83 (1.37) <.001***
DT 4.13 (1.58) 4.30 (2.08) .762
An 3.04 (1.77) 3.17 (1.83) .803
*** p < .001, ** p < .01, * p < .05
task (DecisionNavi-Task) and a sequential informa-
tion navigation task (SequentialNavi-Task). The or-
der was counterbalanced.
4.4 Results
We focused on three main areas: subjective impres-
sion questionnaires, task comparison questionnaires,
and geospatial understanding. These were designed
to evaluate the effectiveness of our proposed sequen-
tial information presentation method in addressing the
hypothesis and enhancing spatial cognition.
4.4.1 Subjective impression questionnaires
Participants responded on a 7-point Likert scale to
eight items related to subjective impressions. The
items are listed below.
Information Organization (IO): I was able to orga-
nize the information from the route guidance by
associating it with the scene in front of me.
Passive Feeling (PF): I felt that the route guidance
was forcing me to give directions.
Mental Workload (MW): I felt anxiety and worry
throughout the task.
Derection Understanding (DU): I understood ex-
actly where I needed to go.
Usefulness (Uf): The information from the route
guidance was helpful.
Surrounding Environment (SE): I was able to fo-
cus on my surroundings.
Directional Thinking (DT): I was always thinking
about my future course.
Annoyance (An): I found the route guidance annoy-
ing and depressing.
Wilcoxon signed-rank tests were performed on
responses to the DecisionNavi-Task and to the
SequentialNavi-Task. Results are shown in Table 1.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
416
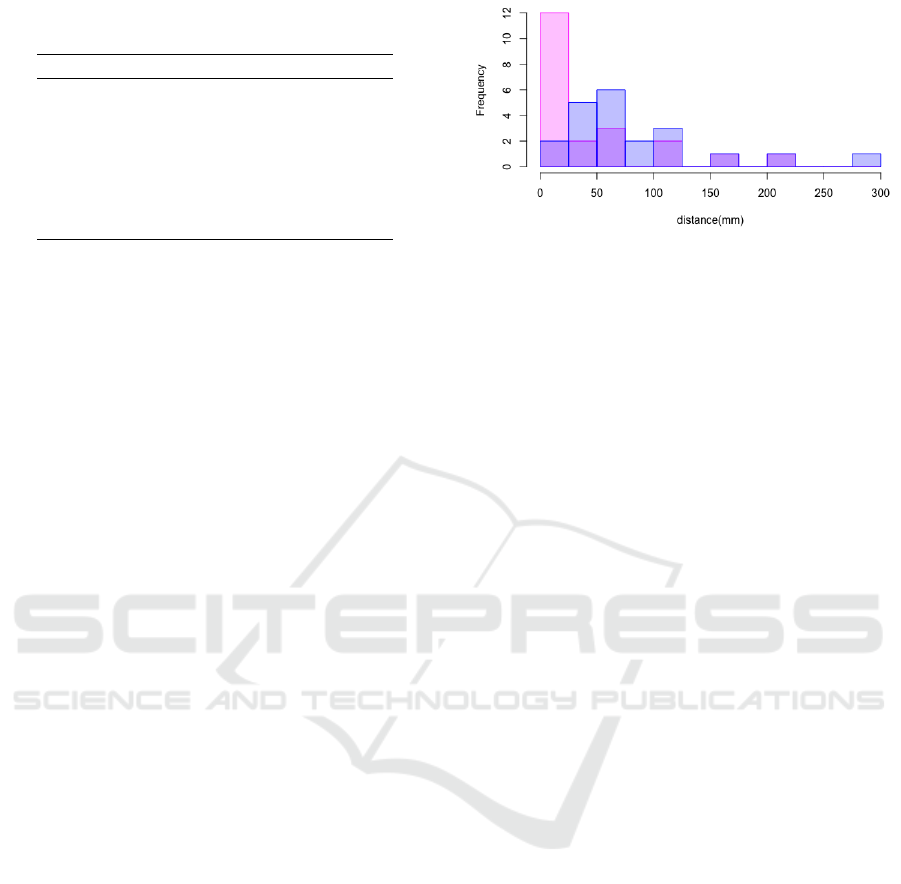
Table 2: Results of task comparison questionnaires between
the DecisionNavi-Task and the SequentialNavi-Task.
Item Ave. SD v p-value
PF -1.39 1.80 33.5 .002**
DU 0.39 2.08 154 .374
USU 1.73 1.32 234 < .001***
PI 1.34 1.43 209 .001**
Im -0.87 1.86 59.0 .027*
MW -1.04 1.36 19.5 .004**
SE 2.00 1.13 271 < .001***
*** p < .001, ** p < .01, * p < .05
Wilcoxon signed-rank tests revealed significant
differences in three items: ”Information organi-
zation” (p = .015), ”Passive feeling” (p = .041),
and ”Surrounding environment” (p < .001). The
SequentialNavi-Task showed higher scores for infor-
mation organization and awareness of the surrounding
environment, suggesting that our approach success-
fully integrated aggregated information with users’
subjective experiences. Interestingly, participants re-
ported feeling less passive pressure from the naviga-
tion system in the SequentialNavi-Task, contrary to
potential concerns about information overload.
4.4.2 Task Comparison Questionnaires
Participants responded to their subjective impressions
by directly comparing the DecisionNavi-Task and the
SequentialNavi-Task on seven items (+3 to -3; pos-
itive: SequentialNavi-Task, negative: DecisionNavi-
Task). The items are listed below.
Passive Feeling (PF): Which Navi made you feel
like you were being forced to follow directions?
Derection Understanding (DU): Which Navi made
it easier to understand direction and distance?
Urban Space Understanding (USU): Which Navi
made it easier to connect directions and surround-
ings?
Positive Impression (PI): Which Navi did you like
better overall?
Immersion (Im): Which Navi made you more fo-
cused on the task?
Mental Workload (MW): Which Navi made you
more anxious or worried during the task?
Surrounding Environment (SE): Which Navi
made you more aware of your surroundings?
A one-sample Wilcoxon rank sum test was per-
formed for each. The results are shown in Table 2.
Significant differences were found in six out of
seven items, with particularly large differences in
Blue: Decision-Navi condition
Pink: Sequential-Navi condition
Figure 4: The histogram of the difference from the correct
path in the DecisionNavi-Task and SequentialNavi-Task.
”Urban space understanding” (p < .001) and ”Sur-
rounding environment” (p < .001). These results indi-
cate that our proposed method effectively mapped ob-
jects in urban space with navigation information, pro-
moting a more comprehensive understanding of the
environment. Notably, the SequentialNavi-Task was
associated with reduced mental workload (p = .004)
and a more positive overall impression (p = .001),
supporting our hypothesis that sequential information
presentation can alleviate the mental workload.
4.4.3 Geospatial Understanding
We analyzed the paths walked during the task, which
were answered by the participants after each task was
completed. Two of the participants did not describe
the route correctly, so their data were removed from
the analysis. The difference from the correct path
was analyzed as the distance of the path drawn off
the correct path, and the histogram of the difference
from the correct path in the DecisionNavi-Task and
SequentialNavi-Task is shown in Figure 4.
In the SequentialNavi-Task, more than half of the
participants were able to reproduce the correct path
with a difference of less than 25 mm, while in the
DecisionNavi-Task, the participants were mostly dis-
tributed in the ”difference between 25 mm and 50
mm” and ”difference between 50 mm and 100 mm”
categories. This indicates that the SequentialNavi-
Task reproduced the correct path relatively well. To
verify this result, a corresponding t-test was con-
ducted on the difference from the correct path. The re-
sults showed that the group using the proposed system
had a significantly smaller difference from the correct
path than the group using the conventional naviga-
tion system (t(20) = 2.23, p = .037). Furthermore,
when asked to indicate correct travel directions at
three intersections, the SequentialNavi-Task resulted
in a significantly higher percentage of correct answers
(Wilcoxon signed-rank test, z = 2.22, p = .033).
These findings collectively suggest that our se-
quential information presentation method effectively
Integration of Aggregated Information and Subjective Experience Through Sequential Information Presentation
417

connected participants’ subjective travel experiences
with objective environmental information. By provid-
ing contextual and landmark information throughout
the route, not just at decision points, we were able to
promote a more comprehensive understanding of the
urban space. This approach addresses the limitations
of conventional navigation systems that often lead to
reduced spatial comprehension and route memory.
5 DISCUSSION
This study examined the impact of route guidance
with sequential information presentation on the user’s
ability to grasp geospatial information and on reduc-
ing the user’s mental workload for navigation. Ex-
perimental results showed that the proposed method
was superior in several important respects compared
to voice guidance that presents navigation at locations
requiring action decisions.
The significant differences found in the subjec-
tive evaluation measures of ”organizing information”
and ”understanding urban space” suggest that the pro-
posed method may promote spatial cognition. This
is consistent with the contribution of landmarks to
spatial memory formation noted by Sorrows & Hir-
tle (1999) (Sorrows and Hirtle, 1999), and supports
the promotion effect of spatial configuration under-
standing shown in the study by May et al. (2003)
(May et al., 2003). Significant differences were
also observed in the objective evaluation measures
of path reproduction and directional judgment, sug-
gesting that the proposed method contributes to ac-
tual spatial memory and directional sense. It is pos-
sible that the proposed method can alleviate to some
extent the decline in spatial grasp when using naviga-
tion systems, as pointed out by Ishikawa et al. (2008)
(Ishikawa et al., 2008). These results suggest that the
proposed method is effective in improving geospatial
understanding and memory by effectively linking the
user’s subjective travel experience and objective envi-
ronmental information.
The significant difference in the ”Mental work-
load” item indicates that the proposed method has the
potential to reduce users’ mental workload. This sug-
gests the possibility of reducing the increased men-
tal workload of using mobile maps reported by Willis
(2005) (Willis et al., 2009). Significant differences in
the ”Surrounding environment” and ”Passive feeling”
items indicate that the proposed method promotes ac-
tive environmental awareness. This suggests that the
proposed method may improve the decreased atten-
tion to the environment when using the navigation
system, which was pointed out in previous studies
(M
¨
unzer et al., 2006; Willis et al., 2009; Huang et al.,
2012). The significantly lower immersiveness of the
proposed method suggests that the proposed method
reduces this problem while still providing an effective
spatial understanding.
Meanwhile, the lack of significant differences in
”Direction understanding ” is inconsistent with the re-
sults of the study by Raubal & Winter (2002) (Raubal
and Winter, 2002). This may be due to the simplic-
ity of the road structure in the experimental environ-
ment. Verification in a more complex environment is
needed.
There are some of the limitations and future works
of this study. The first relates to the experimental en-
vironment. As this experiment was conducted in a
virtual urban environment, it is necessary to verify the
effectiveness of the proposed system in a real urban
environment. In a real urban environment, there are
many factors to consider, such as traffic conditions
and weather conditions, so the effectiveness of the
proposed system in more complex situations needs to
be verified. The second concerns the design of the
navigation system. In this study, the system’s inter-
face had only the minimum elements for navigation.
In addition, the behaviour of the navigation agents
was only a rule-based output of general behaviour. It
is necessary to consider ways of presenting informa-
tion that are tailored to the attributes of the user and
the characteristics of the task. For example, it is nec-
essary to select the most appropriate information pre-
sentation method according to the user and situation,
such as when visual or auditory information presenta-
tion is more effective. The third concerns data acqui-
sition. The only experimental participants in this ex-
periment were university students. In order to verify
the effects on users of different ages and experiences,
it is necessary to conduct the experiment on a wide
range of people. It is hoped that addressing these is-
sues will refine the proposed method and lead to the
development of a practical pedestrian navigation sys-
tem.
6 CONCLUSION
This study investigates the effects of sequential infor-
mation presentation in pedestrian navigation on users’
spatial cognitive abilities, in particular their geospa-
tial understanding, and on their mental workload of
navigation. To achieve this objective, we proposed
a method for sequentially presenting information on
the surrounding area, even at points where no action
decision is required, where information provision is
limited in conventional navigation systems, and veri-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
418

fied its effectiveness through experiments in a virtual
urban environment.
The experimental results suggest that the proposed
system is effective in improving users’ spatial under-
standing and memory compared to conventional nav-
igation. This result was supported by both the ques-
tionnaire, a subjective evaluation measure, and the
path drawing and direction selection tasks, an objec-
tive evaluation measure. The sequential presentation
of information is thought to promote spatial cognition
by drawing the user’s attention to the environment and
facilitating the mapping between navigation informa-
tion and subjective experience. Furthermore, the pro-
posed system has been suggested to reduce user anx-
iety about navigation. This is thought to be a result
of the sequential presentation of information, which
encouraged users to actively seek information and ac-
tively participate in the navigation task. The sequen-
tial information presentation is an effective means of
supporting users’ spatial cognitive abilities and has
the potential to make travelling in urban environments
safer and more comfortable.
REFERENCES
Anacta, V. J. A., Schwering, A., Li, R., and Muenzer,
S. (2017). Orientation information in wayfinding in-
structions: evidences from human verbal and visual
instructions. GeoJournal, 82:567–583.
Barsalou, L. W. (2008). Grounded cognition. Annu. Rev.
Psychol., 59(1):617–645.
Caduff, D. and Timpf, S. (2008). On the assessment of
landmark salience for human navigation. Cognitive
processing, 9:249–267.
Huang, H., Schmidt, M., and Gartner, G. (2012). Spatial
knowledge acquisition with mobile maps, augmented
reality and voice in the context of gps-based pedes-
trian navigation: Results from a field test. Cartogra-
phy and Geographic Information Science, 39(2):107–
116.
Ishikawa, T., Fujiwara, H., Imai, O., and Okabe, A.
(2008). Wayfinding with a gps-based mobile navi-
gation system: A comparison with maps and direct
experience. Journal of environmental psychology,
28(1):74–82.
Ishikawa, T. and Montello, D. R. (2006). Spatial knowl-
edge acquisition from direct experience in the envi-
ronment: Individual differences in the development
of metric knowledge and the integration of separately
learned places. Cognitive psychology, 52(2):93–129.
Janzen, G. and Van Turennout, M. (2004). Selective neu-
ral representation of objects relevant for navigation.
Nature neuroscience, 7(6):673–677.
May, A. J., Ross, T., Bayer, S. H., and Tarkiainen, M. J.
(2003). Pedestrian navigation aids: information re-
quirements and design implications. Personal and
Ubiquitous Computing, 7:331–338.
Montello, D. R. (1998). A new framework for understand-
ing the acquisition of spatial knowledge in large-scale
environments. Spatial and temporal reasoning in geo-
graphic information systems, pages 143–154.
M
¨
unzer, S., Zimmer, H. D., and Baus, J. (2012). Naviga-
tion assistance: a trade-off between wayfinding sup-
port and configural learning support. Journal of ex-
perimental psychology: applied, 18(1):18.
M
¨
unzer, S., Zimmer, H. D., Schwalm, M., Baus, J., and
Aslan, I. (2006). Computer-assisted navigation and
the acquisition of route and survey knowledge. Jour-
nal of environmental psychology, 26(4):300–308.
Raubal, M. and Winter, S. (2002). Enriching wayfind-
ing instructions with local landmarks. In International
conference on geographic information science, pages
243–259. Springer.
Rehrl, K., H
¨
ausler, E., and Leitinger, S. (2010). Compar-
ing the effectiveness of gps-enhanced voice guidance
for pedestrians with metric-and landmark-based in-
struction sets. In Geographic Information Science: 6th
International Conference, GIScience 2010, Zurich,
Switzerland, September 14-17, 2010. Proceedings 6,
pages 189–203. Springer.
Richter, K.-F. and Winter, S. (2014). Landmarks. Springer
Cham Heidelberg New York Dordrecht London. doi,
10(978-3):1.
Ross, T., May, A., and Thompson, S. (2004). The use
of landmarks in pedestrian navigation instructions and
the effects of context. In Mobile Human-Computer
Interaction-MobileHCI 2004: 6th International Sym-
posium, MobileHCI, Glasgow, UK, September 13-16,
2004. Proceedings 6, pages 300–304. Springer.
Schwering, A., Li, R., and Anacta, V. J. A. (2013). Orien-
tation information in different forms of route instruc-
tions. In Short paper proceedings of the 16th AGILE
conference on geographic information science, Leu-
ven, Belgium.
Siegel, A. (1975). The development of spatial representa-
tions of large-scale environments. Advances in Child
Development and Behavior/Academic Press.
Smith, S. M. and Vela, E. (2001). Environmental context-
dependent memory: A review and meta-analysis. Psy-
chonomic bulletin & review, 2001:203–220.
Sorrows, M. E. and Hirtle, S. C. (1999). The nature of
landmarks for real and electronic spaces. In Spa-
tial Information Theory. Cognitive and Computational
Foundations of Geographic Information Science: In-
ternational Conference COSIT’99 Stade, Germany,
August 25–29, 1999 Proceedings 4, pages 37–50.
Springer.
Stankiewicz, B. J. and Kalia, A. A. (2007). Acquistion of
structural versus object landmark knowledge. Journal
of Experimental Psychology: Human Perception and
Performance, 33(2):378.
Tulving, E. and Thomson, D. M. (1973). Encoding speci-
ficity and retrieval processes in episodic memory. Psy-
chological review, 80(5):352.
Willis, K. S., H
¨
olscher, C., Wilbertz, G., and Li, C. (2009).
A comparison of spatial knowledge acquisition with
maps and mobile maps. Computers, Environment and
Urban Systems, 33(2):100–110.
Integration of Aggregated Information and Subjective Experience Through Sequential Information Presentation
419
