
Automated Individualization of Object Detectors for the Semantic
Environment Perception of Mobile Robots
Christian Hofmann
a
, Christopher May
b
, Patrick Ziegler
c
,
Iliya Ghotbiravandi
d
, J
¨
org Franke
e
and Sebastian Reitelsh
¨
ofer
f
Institute for Factory Automation and Production Systems, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg,
Egerlandstraße 7, 91058 Erlangen, Germany
Keywords:
Open Vocabulary Object Detection, Pseudo-Labeling, Large Language Model, Vision Language Model.
Abstract:
Large Language Models (LLMs) and Vision Language Models (VLMs) enable robots to perform complex
tasks. However, many of today’s mobile robots cannot carry the computing hardware required to run these
models on board. Furthermore, access via communication systems to external computers running these models
is often impractical. Therefore, lightweight object detection models are often utilized to enable mobile robots
to semantically perceive their environment. In addition, mobile robots are used in different environments,
which also change regularly. Thus, an automated adaptation of object detectors would simplify the deployment
of mobile robots. In this paper, we present a method for automated environment-specific individualization and
adaptation of lightweight object detectors using LLMs and VLMs, which includes the automated identification
of relevant object classes. We comprehensively evaluate our method and show its successful application in
principle, while also pointing out shortcomings regarding semantic ambiguities and the application of VLMs
for pseudo-labeling datasets with bounding box annotations.
1 INTRODUCTION
Autonomous mobile robots (AMRs) are used for
various tasks in different domains such as indus-
try, healthcare or construction. Recently, power-
ful machine learning approaches such as Large Lan-
guage Models (LLMs) and Vision Language Models
(VLMs) have been used to enable them to solve com-
plex tasks autonomously.
However, these machine learning approaches re-
quire extensive computing resources. On the one
hand, they can be executed externally, i.e., not on
the robot itself, and are then accessible to the robot
via communication systems. This requires the robot
to have a reliable connection to the external sys-
tems in order to maintain its autonomous capabilities.
In addition, there may be a noticeable delay in the
robot’s behavior and actions due to external process-
a
https://orcid.org/0000-0003-1720-6948
b
https://orcid.org/0009-0003-2571-3461
c
https://orcid.org/0009-0009-8234-8038
d
https://orcid.org/0009-0007-8790-1782
e
https://orcid.org/0000-0003-0700-2028
f
https://orcid.org/0000-0002-4472-0208
door, plant, sign, handle
a)
b)
c)
Figure 1: Simplified illustration of our proposed approach:
a) First, object classes are identified in an image dataset
and merged to consistent labels using an LLM, b) using a
VLM, pseudo-labels for the dataset based on the identified
object classes are generated and c) using the pseudo-labeled
dataset, a lightweight object detector is trained.
ing. On the other hand, the required computing hard-
ware could be integrated on-board the robot. This in
turn leads to high power consumption and increased
weight. Both alternatives are not particularly suitable
for some types of mobile robots. AMRs like drones
Hofmann, C., May, C., Ziegler, P., Ghotbiravandi, I., Franke, J. and Reitelshöfer, S.
Automated Individualization of Object Detectors for the Semantic Environment Perception of Mobile Robots.
DOI: 10.5220/0013162500003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
851-862
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
851

or transportation robots often don’t have the possibil-
ity to carry powerful computing hardware that would
significantly decrease payload capacity and operating
time. A delayed reaction due to off-board computa-
tions may also lead to severe safety issues.
A crucial task and capability of today’s AMRs is
environment perception. In the state of the art, AMR
mainly use semantic perception approaches to detect
relevant objects in their environment based on camera
or Lidar data as sensory input. However, AMRs often
operate in changing environments. They should there-
fore also be able to continuously adapt their software
and capabilities to changing environments.
Consequently, there is a need for enabling the au-
tomatic individualization of a robot’s semantic per-
ception of the environment, with the adapted percep-
tion software being executable on board of an AMR
(Hofmann et al., 2023).
In this paper, we investigate how fully automated
environment-specific object detector adaptation can
be realized. We focus on a scenario where a robot
is deployed in a corridor environment. A lightweight
object detector should be automatically adapted to
this specific environment by the proposed method, as
illustrated in Figure 1. Our goal in this paper is to
detect relevant objects in the specific environment as
good as possible, i.e., to get an individualized object
detector for the environment. It is not our goal to
get a generalized object detection performing well in
other scenarios and environments. If the robot moves
to another environment or the environment changes,
the detector should be adapted accordingly by the ap-
proach. From our point of view, adapting the detector
is thus equivalent to individualizing the detector for
the respective robot and environment.
The main contributions of this paper are:
• We propose an approach for fully automated
environment-specific object detector adaptation
using LLMs and VLMs.
• Our method also automates the identification of
relevant object classes compared to related work.
• We present a comprehensive evaluation of each
step of our proposed method with a focus on adap-
tation to a specific environment.
The paper is structured as follows: In section 2 re-
lated work is presented and discussed. The proposed
method for automatic environment-specific individu-
alization of object detectors is introduced in section 3.
In section 4, an implementation of our approach is de-
scribed, evaluated and discussed. We summarize the
results and key findings in section 5.
2 RELATED WORK
In recent years, machine learning and especially neu-
ral networks have revolutionized object detection in
images. Following, we provide a brief overview of
the work in this field that is relevant to our approach.
2.1 Object Detection
Object detection describes the task to discover objects
in images, to determine their position in the image and
to classify the discovered and localized objects. The
results of an object detection task are often bounding
boxes enclosing the area in which a specific object is
visible as well as a label classifying the object in the
bounding box.
In the state of the art, convolutional neural net-
works (CNNs) are commonly used for object detec-
tion. CNNs for object detection can be generally di-
vided into two categories: one-stage detectors and
two-stage detectors. One-stage detectors solve the
whole object detection task (localization and classi-
fication) within a single CNN, while two-stage detec-
tors use one CNN for localizing possible objects in
the image and another CNN at second stage verifies
and classifies the object in the prior identified areas
(Zhao et al., 2019). Prominent examples are YOLO
as a single-stage object detector and Faster-RCNN as
a two-stage detection approach (Zhao et al., 2019).
A further and more recent powerful approach for
object detection are Vision Transformers. In contrast
to CNNs, Vision Transformers work on an attention-
based encoder-decoder architecture (Han et al., 2023).
CNNs and Vision Transformers have in common
that they are trained with a large amount of annotated
training data for a specific set of classes to be de-
tected (Gao et al., 2022), (Hofmann et al., 2023). The
classes are normally selected manually according to
a task to be solved. Changing or adding classes re-
quires retraining the whole network with an adapted
dataset (Gao et al., 2022). However, the research area
of continuous learning aims to overcome this prob-
lem (Lesort et al., 2020). Nevertheless, mobile robots
often encounter a large variety of objects, depending
on the environments they are deployed in. Conse-
quently, it is not possible to train all possible object
classes a robot could encounter in advance of deploy-
ment (Hofmann et al., 2023). This aspect is addressed
in the research areas of Open World Object Detec-
tion, Zero-Shot Object Detection and Open Vocabu-
lary Object Detection, among others (Joseph et al.,
2021), (Firoozi et al., 2024), (Zhu and Chen, 2024).
Next to CNNs and Vision Transformers, Vision
Language Models (VLMs) are a recent powerful ap-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
852

proach for object detection, including Zero-Shot Ob-
ject Detection and Open Vocabulary Object Detection
(Firoozi et al., 2024). VLMs take both an image and
a text prompt as input to solve varying tasks. In ad-
dition to object detection, examples for such tasks
are semantic segmentation or image editing. How-
ever, in the context of practical use on robots, VLMs
have problems such as high inference times, granular-
ity (when should parts of an object be considered as
one object or as individual objects) and lack of uncer-
tainty quantification, e.g., for detecting hallucinations
of the network (Firoozi et al., 2024).
2.2 Pseudo-Labeling for Open World
Learning Scenarios
In the investigated setting, more or less unlimited ac-
cess to images of the objects to be detected can be
assumed. The images are provided by the robot op-
erating in the environment. However, it is often not
known in advance which classes are present and rele-
vant in the specific environment the robot is deployed
to. This represents an Open World Learning Scenario
(Wu et al., 2024). Further, we do not require the
detector adapdation process to be performed in real-
time. Thus, we assume access to powerful hardware
on external computers for adapting the detector. How-
ever, an individualized object detector with low infer-
ence times should be finally available for the robot.
This setting is well suited for the use of pseudo-
labeling (Zhu and Chen, 2024), (Wu et al., 2024),
(Kim et al., 2024). Pseudo-labeling and pseudo-labels
are often used in Open World Learning Scenarios, for
Domain Adaption and Novel Class Discovery. Exam-
ple works are (Kim et al., 2024), (Cheng et al., 2024),
(Wang et al., 2023), (Vaze et al., 2022), (Gao et al.,
2022), (Sun et al., 2022) and (Han et al., 2022).
The benefit of pseudo-labels was introduced in
2013 (Lee et al., 2013). Lee et al. define pseudo-
labels as ”target classes for unlabeled data as if they
were true labels” (Lee et al., 2013, p. 3). This means,
they assume a predicted label for unlabeled data as
true and reuse the newly generated label for fine-
tuning their model in a semi-supervised training.
The recent approaches presented in (Gao et al.,
2022) and (Kim et al., 2024) successfully automati-
cally generate pseudo-labels for datasets using VLMs,
which fits our needs for the described scenario well.
(Gao et al., 2022) use the localization ability of
pre-trained VLMs to generate bounding-box annota-
tions as pseudo-labels from large scale image-caption
pairs. (Kim et al., 2024) use a VLM to verify the
detections of an object detector and thus generate
valid bounding-box annotations. A quite simple ap-
proach to extract pseudo-labels is the Roboflow au-
todistill framework (Gallagher, 2023). It uses founda-
tion models like GroundingDINO (Liu et al., 2023),
(IDEA Research, 2023) to detect or segment objects
in an image dataset based on an input text prompt
comprising the object classes of interest. Based on
the detections or segmentation masks created in this
way as pseudo-labels, smaller networks like YOLOv8
(Jocher et al., 2023) can be automatically trained.
The mentioned approaches require a human in the
loop, either for selecting the object classes to be de-
tected or to prepare and provide suited datasets for
training. In the context of AMR, the goal should be
to remove the human from the loop at as many points
as possible in order to increase the robot’s autonomy
(Hofmann et al., 2023).
To overcome this issue and enable fully automated
adaptation of an object detector to a specific environ-
ment based on pseudo-labeling, we propose and in-
vestigate an approach that uses VLMs and LLMs to
automatically extract relevant object classes from im-
ages of the specific environment. Compared to the
work in (Kim et al., 2024) this paper presents and
investigates the automated retrieval of object classes
relevant for a specific environemt. Building upon
the concpets introducted in (Hofmann et al., 2023),
we propose an improved and more flexible pipeline
for automated object detector approach. Further, in-
spired by the autodistill framework (Gallagher, 2023),
we investigate and critically evaluate the training of a
lightweight object detector based on a pseudo-labeled
training dataset with bounding-box annotations.
3 APPROACH FOR AUTOMATED
OBJECT DETECTOR
INDIVIDUALIZATION
Our method for fully automated environment-specific
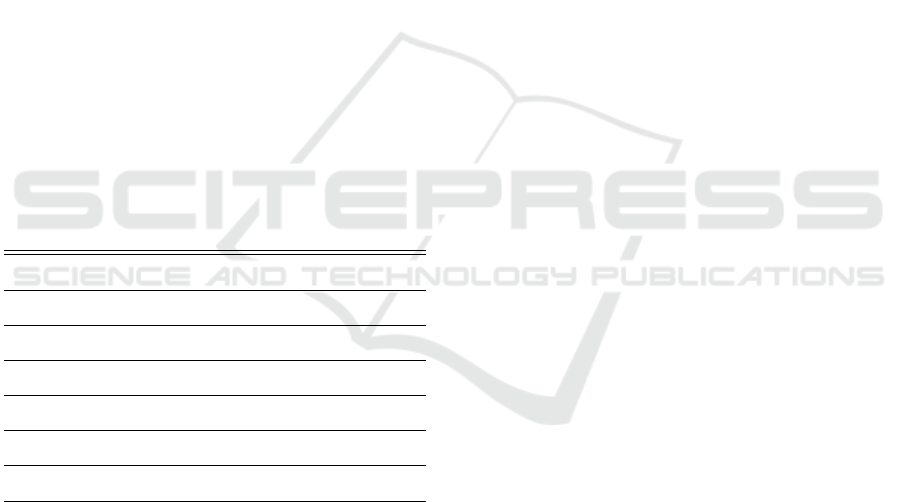
object detector adaptation is shown as flowchart in
Figure 2. Following the architecture for mobile robot
software adaptation presented in (Hofmann et al.,
2023), the adaptation pipeline is intended to be exe-
cuted ”offline”. Offline in this context means that the
robot is either not in operation at the time of adap-
tation or the adaptation process is performed on an
external computer.
Following we describe the steps of the adaptation
pipeline in detail.
Automated Individualization of Object Detectors for the Semantic Environment Perception of Mobile Robots
853

Start
Extract image dataset representative of the
environment
End
Ask LLM to merge object classes, if possible
For each image in representative dataset:
Ask VLM to name the visible objects
Store object classes from response
Store merged object classes
Extract image dataset for training
For each image in training dataset:
Detect objects that are in merged object classes
Store detections as pseudo-labels
Train object detector with pseudo-labels
Figure 2: Flowchart of the investigated pipeline for fully
automated environment-specific object detector adaptation.
3.1 Representative Image Dataset
Generation
The first step is to extract sample images that show the
specific operating environment. Therefore, the robot
should capture images with its camera when operat-
ing in the environment. There is no additional effort
in saving images or videos during operation. Depend-
ing on the size of the environment and the robot’s op-
erating time, it is not necessary to use all images. For
the following pipeline, several images that represent
and depict the environment and objects therein well
are sufficient. Thus, a time- or location-based extrac-
tion of sample images can be used to automatically
obtain a dataset representative of the environment.
3.2 Automatic Object Classes
Identification
To obtain a fully automated process, we use an VLM
to identify and name objects in the environment. Each
image of the representative dataset is input into a
VLM with the task of naming all objects visible in the
image. The response, i.e., the visible object classes
output by the VLM, is saved for each image.
3.3 Object Classes Merging
Since the example images depict the same environ-
ment, it is probable that objects of the same class
are visible multiple times and consequently the object
class is output multiple times. However, a possible
outcome could be a slightly varying name or a differ-
ent class specification (e.g., fire-extinguisher and ex-
tinguisher). We introduce a step to merge such class
variations and synonyms that name the same object
class into one label. Since this is a text-based reason-
ing task, we propose LLMs to be used for this task.
The outcome is a list of object classes that are present
in the specific environment.
Note that also manually provided labels could be
included in this process to make the LLM use certain
labels for object classes.
3.4 Dataset Pseudo-Labeling
Based on images of the specific environments and the
list with the merged object class labels, VLMs can
be used to generate pseudo-labels (Gao et al., 2022),
(Gallagher, 2023), (Kim et al., 2024).
At this step, we introduce a new ”training dataset”
that may differ from the prior used representative
dataset. The representative dataset should just provide
a good overview over the environment. However, the
training dataset should be later used for training an
object detector, thus contain more images and sam-
ples of the objects to be detected from different per-
spectives. To create the image dataset, again a time-
or location-based extraction policy can be used. In
this process, each image in the dataset is evaluated
by a VLM with the merged list of identified object
classes as text input. The outcome are pseudo-labels
in form of bounding boxes with object-class annota-
tions for the whole dataset.
This process could also be easily adapted for se-
mantic segmentation, by using VLMs that output seg-
mentation masks.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
854

3.5 Object Detector Training
The final step of the proposed method is the train-
ing of a suited object detection network based on
the pseudo-labeled training dataset. This step could
be seen as a kind of “knowledge distillation” via the
pseudo-labels. The pseudo-labeled dataset thus repre-
sents an abstraction of the distilled knowledge of the
VLM. Thus, the flexible knowledge distillation to al-
most any other object detection network is enabled.
Additionally, the pseudo-labeled dataset allows
easy integration of the data from multiple robots op-
erating in the same environment. All image data pro-
vided can be processed by the method and accumu-
lated in an overall pseudo-labeled dataset for the en-
vironment, cf. (Hofmann et al., 2023).
The abstraction of the pseudo-labeled dataset also
allows including further data, like from datasets avail-
able online or artificially created datasets, e.g., using
simulations or generative neural networks. This en-
ables a more robust object detector training while also
focusing the perspective of the robot on the specific
environment. In addition, object classes not or not yet
present could be thus included.
Moreover, the approach enables flexible adapta-
tion to new data collected in the environment. This
allows the automated incremental and continuous in-
tegration of changes in the environment, e.g., new or
disappearing object classes. Beyond this, the dataset
can be continuously improved and expanded with
newly collected images using the method presented.
4 IMPLEMENTATION,
EVALUATION AND
DISCUSSION
This section first presents an exemplary implementa-
tion of the proposed approach. Further, the evaluation
of the proposed approach based on the implementa-
tion is presented and discussed.
4.1 Exemplary Implementation
We implemented the processing pipeline with GPT-4o
(OpenAI, 2024) as LLM and VLM to automatically
identify the object classes visible in the representa-
tive image dataset and to merge the object classes
into consistent labels. We chose GPT-4o since it has
the capability to process the image and text prompt
for object class identification (VLM) as well as the
completely text-based prompt for merging the identi-
fied object classes (LLM). However, other LLMs and
VLMs could be used for these tasks.
We used the following prompt to automatically
identify the relevant object classes with GPT-4o:
I need help labeling objects in an image for
training an object detector.
Instructions:
1. Identify and label all visible objects,
including those in the background.
2. Provide one label per object class,
even if multiple instances are present.
3. Use concise, single-word labels that align
with standard object categories from
datasets like COCO (e.g., chair, table,
bicycle, person, bottle).
Output Format:
Respond in a list, all lowercase:
- label_1
- label_2
- label_3
- ...
- label_n
The prompt is kept quite general in order to identify
as many object classes as possible in the images of the
representative dataset. A practical application where
it is advantageous to detect as many object classes
as possible is localization using semantic maps, e.g.,
presented in (Zimmerman et al., 2023). However, the
prompt could be adapted so that specifically objects
required for a certain task should be identified.
The automatic class merging was performed with
the following prompt and GPT-4o:
You are given a list of object labels.
Your task is to identify if any of these
labels can be grouped under a single label.
Instructions:
- Identify labels that are synonyms,
variations, or refer to the same object
category.
- Only suggest merges when the labels
unambiguously belong to the same object
category.
- If it makes sense, prefer to group labels
under existing labels from the provided list.
- Group all labels referring to
structural elements of buildings
(e.g., "wall," "ceiling") or
rooms (e.g., "kitchen," "bathroom")
under the label "building".
- Keep your response short and concise,
listing only the labels to be merged and
their target category.
Output Format:
For each group, use the following format:
[label_1, label_2, ...] -> category_name
List of object labels:
{’, ’.join(labels)}
Automated Individualization of Object Detectors for the Semantic Environment Perception of Mobile Robots
855

Again, the prompt is kept quite general. Nevertheless,
we have introduced the instruction to group all la-
bels referring to structural elements of buildings (e.g.,
”wall,” ”ceiling”) or rooms (e.g., ”kitchen,” ”bath-
room”) under the label ”building”. This provides the
option of simply deleting such object classes and la-
bels (cf. subsection 4.3).
To obtain the pseudo-labels for the images in the
training dataset on the basis of the previously iden-
tified and merged object classes, the VLM Ground-
ingDINO is used (Liu et al., 2023) (IDEA Research,
2023). Pseudo-labeling using GroundingDINO (and
other foundation models) is also presented in the
autodistill framework (Gallagher, 2023). Again,
other approaches with similar capabilities as Ground-
ingDino may be used for this task.
As exemplary lightweight object detection ap-
proach to be deployed on a robot, YOLOv8s (Jocher
et al., 2023) is trained using the training dataset with
annotations from the pseudo-labeling step.
4.2 Evaluation Setup
Our evaluation setup consists of three consecutive
runs in which a robot moved through a corridor (25 m
long) in our institute. The corridor is the environment
to which the robot, or more precisely its object detec-
tor (YOLOv8s), is to be automatically adapted. Dur-
ing each run, a video was captured with a camera on
the robot (approx. 1 m above the floor). The videos
therefore show the robot’s perspective of its environ-
ment. The videos were recorded at a frame rate of
15 Hz and a resolution of 1920 x 1080 pixels. Dur-
ing each run, the robot moves from one end of the
corridor to the other, turns around and moves back
to its starting position. The runs took place on dif-
ferent days, so the robot’s trajectory and the lighting
conditions in the videos differ slightly. However, the
environment itself and the objects in it did not change
significantly between the runs.
Our expectation for this evaluation setup is an in-
creasing adaptation, i.e., improved object detection
results, after each video has been processed and the
new training data has been used to train the YOLOv8s
model.
In the next subsection, the evaluation results of the
proposed method are presented and discussed in detail
based on the following evaluation steps:
1. Identification of Object Classes Based on the
Representative Dataset. We extracted an image
from each of the three videos approximately ev-
ery four seconds. This results in 30 images in the
representative dataset for run 1, 33 images for run
2 and 29 images for run 3. We sent each image
to GPT-4o via the API together with the prompt
described above. We saved the response, i.e., the
identified object classes, for each image for eval-
uation.
2. Merging of Identified Object Classes. We
passed the list of identified object classes from
each representative dataset with the previously de-
scribed merge prompt to GPT-4o, again via API.
This merging step was performed five times for
each list of indentified object classes and each re-
sponse was stored.
3. Pseudo-Labeling Using GroundingDINO. For
evaluating GroundingDINO for pseudo-labeling,
we extracted 100 images from all three videos
(run 1: 34 images, run 2: 33 images, run 3:
33 images). We manually annotated the bound-
ing boxes for each object class in the merged
object classes (previous step) in these 100 im-
ages. This hand-labeled dataset represents our
”Ground-Truth Dataset”. We apply Ground-
ingDINO to detect the merged object classes in
these 100 images, i.e., to generate the pseudo-
labels for these images. We compare the pseudo-
labels generated by GroundingDINO with varied
parameters (text threshold and box threshold) to
the manual annotations. This evaluation step pro-
vides a parameter selection guideline for the fol-
lowing pseudo-labeling of the training datasets.
4. Performance of YOLOv8s Trained on Pseudo-
Labeled Datasets. In the final evaluation step,
we investigate the result of training YOLOv8s
with pseudo-labeled training datasets. Therefore,
we trained YOLOv8s using the training datasets
that were generated with different parameters set-
tings of GroundingDINO. Additionally, we study
whether an adaptation or improvement effect can
be observed, when the amount of training data is
increased with the newly captured images after
each run. Further, we investigate the effects of
a differing image amount included in the training
dataset. Finally, we also investigate combining a
pseudo-labeled training dataset with a dataset that
is online availabe.
4.3 Evaluation Results and Discussion
Following, the results of the four previously described
evaluation steps are presented and discussed.
1. Identification of Object Classes Based on the
Representative Dataset
We passed all images of the three representative
datasets with the previously described prompt (cf.
subsection 4.1) to GPT-4o. The following classes
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
856

with the number of occurrences in brackets behind
them were identified by GPT-4o for the three repre-
sentative data sets:
• Run 1: door (30), light (23), wall (16), ceiling
(15), floor (15), plant (11), sign (4), handle (4),
cabinet (3), mat (2), table (2), hallway (2), bicycle
(1), frame (1), poster (1), sofa (1), extinguisher
(1), fire extinguisher (1), ceiling light (1), hall-
way (2).
• Run 2: door (33), light (21), ceiling (18), floor
(16), wall (13), plant (13), sign (7), cabinet (7),
handle (3), table (2), poster (2), hallway (2), mat
(1), extinguisher (1), ceilinglight (1), ceilinglamp
(1), camera (1), chair (1), window (1).
• Run 3: door (26), light (17), ceiling (13), plant
(11), wall (10), floor (10), hallway (4), poster (3),
handle (3), cabinet (3), sign (2), ceiling light (2),
table (1), extinguisher (1), fire extinguisher (1),
corridor (1).
The identified classes cover the objects present in the
representative dataset and the environment quite well
(cf. Figure 1). The bicycle (run 1) and the camera
(run 2) are the only clearly false class identifications.
There are also a few missing objects like a first aid kit,
a switch and a fire alarm button. Some classes like the
class window, were only identified seldom, although
they are quite often present in the real environment
and also in the representative datasets. Additionally,
some variations of the same class are obvious (light
and ceiling light, extinguisher and fire extinguisher).
The following class merging step was introduced to
get rid of such variations and synonyms.
Further, some classes like ceiling, wall and hall-
way were correctly identified but from our point of
view they are most times not relevant for a mobile
robot’s object detection. Consequently, we added an
instruction in the following class merging prompt to
group such structural elements and room names into a
group ”building” to easily remove them from the next
process steps (cf. subsection 4.1).
Another point we observed is that GPT-4o’s re-
sponses to the exact same prompt with the exact same
image are not always the same (also when sent in im-
mediate succession). Having multiple images of the
same environment in representative dataset, this ef-
fect can be equalized in parts. However, when there
are only few objects of a class in an environment or
only few images in the representative dataset, some
object classes will be possibly not identified. With
one or more robots that repeatedly capture data of the
environment, the proposed method is able to integrate
also “rare” objects.
Moreover, our prompt is quite general, which may
lead to semantic ambiguities. Considering the class
”door” in our evaluation scenario, it is clear that doors
to rooms are present in a corridor. However, the cab-
inets in the investigated corridor have doors as well.
Such semantic ambiguities and uncertainties regard-
ing object granularity can cause problems in the fol-
lowing adaptation process and thus for the robot’s ob-
ject detection. By a more detailed specification of the
robot’s task or even relevant objects in the prompt,
the object classes in the representative dataset could
be identified more specifically.
Summed up, the object class identification using
GPT-4o as VLM based on the representative datasets
was successful but some aspects like semantic ambi-
guities and uncertainties regarding object granularity
have to be investigated and improved in future work.
In addition, the prompt may be improved to identify
all classes in the representative dataset and the envi-
ronment at a high rate and reliability.
2. Merging of Identified Object Classes
To overcome the problem of variations and synonyms
for the same class and to easily remove unwanted
classes, we included a merging step for the identified
object classes. The merging step is fully text based as
described in subsection 4.1.
In this step, we face the same problem as in the
previous step, namely that the responses of GPT-4o
are differing, even though the input does not change.
This may lead to differing class merges after each run.
To evaluate this effect, we asked GPT-4o to merge the
classes five times in immediate succession for each
run.
As an example, the results for run 1 are shown in
Table 1. It is noticeable, that no response and thus
class merging scheme is identical. We also observed
this for the two other runs. We therefore do not be-
lieve that class merges should be derived from a single
response of GPT-4o.
However, by selecting merges that are named
multiple times or most times, a quite good merging
scheme can be automatically constructed. Using this
procedure for the identified and merged labels of the
three runs, the resulting merge schemes are displayed
in Table 2.
For run 2 we multiple times observe a merge that
was not intended: ”[door, handle] → door”. However,
this merge is not obviously false. Here we face the
granularity problem, as described in (Firoozi et al.,
2024). Again, more details about the robot’s task and
the object classes required for the task could help to
overcome this problem.
Overall, this kind of statistical evaluation to cre-
ate the merge schemes is quite successful. Variations
of the same class, e.g., light and ceiling light are suc-
Automated Individualization of Object Detectors for the Semantic Environment Perception of Mobile Robots
857
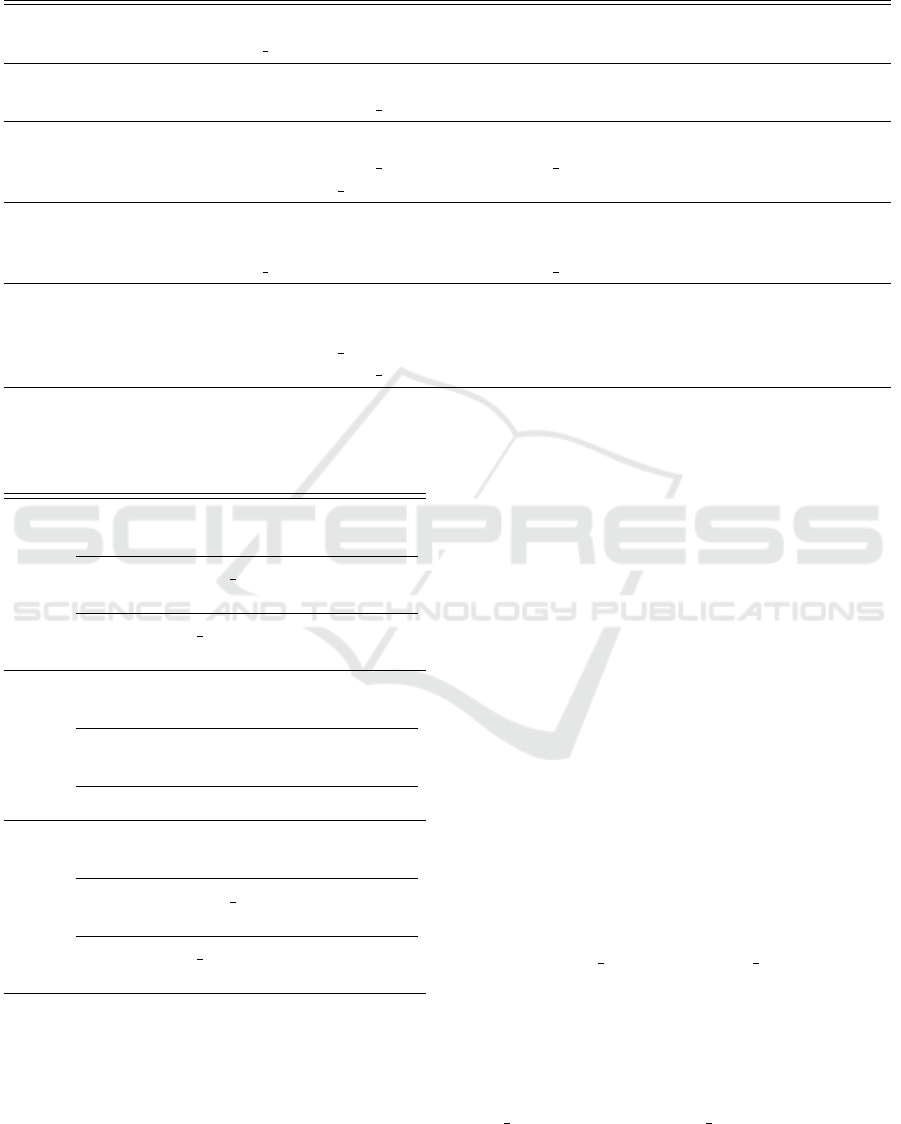
Table 1: Responses from GPT-4o to the requests for merging the identified object classes in the representative dataset from
run 1. Class merges that were mentioned more than once are highlighted in bold.
Merge Request Response
1
[ceiling, floor, wall, hallway, cabinet] → building
[fire extinguisher, extinguisher] → extinguisher
2
[ceiling, floor, wall, hallway] → building
[extinguisher, fire extinguisher] → extinguisher
3
[ceiling, floor, wall, hallway] → building
[extinguisher, fire extinguisher] → fire extinguisher
[light, ceiling light] → light
4
[ceiling, floor, hallway, wall] → building
[cabinet, handle] → door
[fire extinguisher, extinguisher] → fire extinguisher
5
[door, handle] → door
[ceiling, wall, floor, hallway, kitchen, bathroom] → building
[light, ceiling light] → light
[extinguisher, fire extinguisher] → extinguisher
Table 2: Multiple times named class merging schemes for
the three runs.
Run Merge Scheme
[ceiling, floor, wall, hallway]
→ building
1
[extinguisher, fire extinguisher]
→ extinguisher
[light, ceiling light]
→ light
[wall, floor, ceiling, hallway, corridor]
→ building
2
[light, ceilinglight, ceilinglamp]
→ light
[handle, door] → door
[wall, floor, ceiling, hallway, corridor]
→ building
3
[extinguisher, fire extinguisher]
→ extinguisher
[light, ceiling light]
→ light
cessfully merged. The instruction to sort out room
names and structural building elements works well.
After merging the classes for each run, next to the
building group, object classes that were named only
once are sorted out assuming that they are false ob-
ject identifications like the class ”bicycle”. However,
in this process, the correct classes sofa (run 1), chair
(run 2), and window (run 2) are removed. Neverthe-
less, these classes would be added again, if they are
identified in further runs. Also, an automatic removal
of classes that are not detected anymore after some
runs is possible.
Note that it would depend on whether the merge
schemes are stored after each run for the following
runs or not, whether the class handle is included in
the classes after run three. We decided to include it
for further evaluation. Since the environment did not
change significantly between the runs, as expected no
new classes were discovered in the consecutive runs.
Finally, after run three, the following ten object
classes would have been identified for our corridor
environment: door, light, plant, sign, handle, cabinet,
mat, table, poster, extinguisher.
3. Pseudo-Labeling Using GroundingDINO
As described in subsection 4.2, we manually anno-
tated all instances of the ten identified object classes
with bounding boxes in 100 images extracted from the
three runs.
We investigate the use of GroundingDINO for
generating pseudo-labels. GroundingDINO has the
parameters text threshold and box threshold to only
output boxes and words, i.e., labels, that have a simi-
larity above the threshold (IDEA Research, 2023).
For gaining insight into the influence of these
parameters on the pseudo-labeling, we run a pa-
rameter sweep on the two parameters. As the val-
ues suggested on GroundingDINO’s GitHub page are
box threshold = 0.35 and text threshold = 0.25 (IDEA
Research, 2023), we start the parameter sweep at 0.15
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
858
for both parameters and increase the values indepen-
dently by 0.05 during the sweep until both reach the
value 0.4. During the parameter sweep, for each pa-
rameter constellation the 100 images are evaluated by
GroundingDINO with the ten classes as text input.
The output are the detection results for these classes,
thus our pseudo-labels.
The pseudo-labeling results of GroundingDINO
are compared to our manually-annotated labels in Ta-
ble 3. The table shows the results of parameter set-
tings where the box threshold value is equal to the
text threshold value, as they provide a good overview
of the behavior of GroundingDINO when the param-
eters are varied. Other parameter settings where the
box threshold value does not equal the text threshold
value fit well with the pattern shown.
In the evaluation, a pseudo-label is evaluated as
correct (true positive) if the class matches the manu-
ally annotated class and if the pseudo-label bounding
box has an intersection over union (IoU) of more than
0.5 with the manually annotated bounding box.
Table 3: Results of comparing the predicted pseudo-labels
of GroundingDino to our manual labels for different box
and text thresholds.
Threshold: box threshold / text threshold, TP: True Posi-
tive, FP: False Positive, FN: False Negative, P: Precision,
R: Recall, F1: F1-Score.
Threshold TP FP FN P R F1
0.10/0.10 1017 3235 1191 0.24 0.46 0.31
0.15/0.15 1042 1831 1166 0.36 0.47 0.41
0.20/0.20 999 890 1209 0.53 0.45 0.49
0.25/0.25 840 363 1368 0.70 0.38 0.49
0.30/0.30 570 117 1638 0.83 0.26 0.39
0.35/0.35 361 41 1847 0.90 0.16 0.28
0.40/0.40 218 17 1990 0.93 0.10 0.18
It is obvious, that the pseudo-labeling is not really
good. At low thresholds, 0.1 and 0.15, the number of
true positives is quite high while also providing a huge
number of false positives. At medium thresholds, 0.2,
0.25 and 0.3, the number of false positives decreases
significantly while the number of true positives also
decreases moderately. At high threshold values, 0.35
and 0.4, the number of true positive and false positive
results decreases further. At high threshold values,
however, the recall, i.e., the number of true positives
in relation to all ground truth labels, is quite low.
We observed almost the same results when apply-
ing the autodistill framework (Gallagher, 2023) using
GroundingDINO.
For the evaluation of training YOLOv8s based on
the pseudo-labeled datasets, we chose two parameter
options for pseudo-labeling with GroundingDINO:
• 0.2 / 0.2: These parameter settings show the high-
est F1 score with a high number of true positive
but also a nearly equal number of false positives.
• 0.3 / 0.3: These settings provide a lower but still
acceptable number of true positives but also a sig-
nificantly decreased number of false positives.
Our evaluation includes ten different object classes,
so we assume that this parameter selection is trans-
ferable to similar settings. However, describing the
objects to be detect more detailed in the input prompt,
e.g., by using attributes of the objects, may improve
the results of GroundingDINO an thus other parame-
ter setting may provide better results. Further, since
our evaluation environment comprises quite common
object classes, we expect even worse results when
using GroundingDINO to pseudo-label less common
objects, e.g., from an industrial environment.
4. Performance of YOLOv8s Trained on Pseudo-
Labeled Datasets
For training YOLOv8s, we first created training
datasets (cf. section 3). Similar to the creation of
the representative datasets, we did not use all images
from the videos recorded in the three runs, but ex-
tracted images in specific time steps. The following
evaluation is mainly based on a training dataset that
contains every fifth image extracted from the videos,
which corresponds to a frame rate of 3 Hz. Thus, we
want to avoid including too many similar perspectives
of the environment and objects therein.
We also created a training dataset based on ex-
tracting every fifteenth frame, i.e., even less images.
Further, we also investigate adding other data than the
self-captured image to the training dataset. There-
for we extracted the images and bounding box an-
notations for the classes ”door” and ”handle” from a
dataset available online (Arduengo et al., 2021).
The training data pseudo-labeling for our datasets
was performed according to our automated process
using GroudingDINO, with the threshold settings
0.2 / 0.2 and 0.3 / 0.3. We did not manually adapt
or improve the pseudo-labeling-based annotation re-
sults, but used the detections of GroundingDINO as is
as pseudo-labels. The text input prompt for Ground-
ingDINO were again the previously identified classes:
door, light, plant, sign, handle, cabinet, mat, table,
poster and extinguisher.
After training YOLOv8s using the newly created
training datasets, we evaluated the detection perfor-
mance using the 100 manually annotated images.
Those images were included in none of the train-
Automated Individualization of Object Detectors for the Semantic Environment Perception of Mobile Robots
859

ing datasets. Nevertheless, they look quite similar to
training data, since they display exactly the same en-
vironment. However, we do not consider this fact as
negative because our goal is the adaption or individu-
alization to this specific environment. Thus, we only
require good results for this specific environment.
The results of training YOLOv8s with the train-
ing datasets created from the videos of all three runs
(1+2+3) with every fifth image extracted (3Hz) us-
ing different settings of GroundingDINO for pseudo-
labeling (thresholds 0.2/0.2 or 0.3/0.3) are shown as
first results in Table 4. The data in Table 4 shows,
that YOLOv8s trained with pseudo-labels based on
GroundingDINO thresholds at 0.3 (YOLOv8s@0.3)
provides better results from a robot’s or roboticist’s
perspective. The mAP is higher in this case and the
number of false positives (FP) is significantly lower
compared to the YOLOv8s trained with pseudo-labels
generated with GroundingDINO at thresholds at 0.2
(YOLOv8s@0.2). Nevertheless, even the better per-
formance of YOLOv8s@0.3 is not well suited for a
real application.
It is notable, that the object detection results of
YOLOv8s@0.3 are nearly equal, even slightly bet-
ter, compared to the ones of GroundingDINO with
thresholds at 0.3 (cf. Table 3). This shows well work-
ing knowledge distillation from GroundingDINO to
YOLO. For YOLOv8s@0.2 the results are slightly
worse compared to the ones of GroundingDINO with
thresholds at 0.2 but still prove working knowledge
distillation via the pseudo-labels.
The following evaluation only considers the
datasets with pseudo-labels from GroundingDINO
with a box and text threshold at 0.3.
In Table 5 the results of YOLOv8s trained on a dif-
fering image amount in the training datasets are dis-
played. First, the results of YOLOv8s@0.3 trained
on every fifth image extracted from the three videos,
in total 1089 images, are shown. Second, the re-
sults of YOLOv8s@0.3 trained on every fifteenth im-
age (1 Hz) extracted from the three videos, in to-
Table 4: Evaluation results of YOLOv8s trained on datasets
with every fifth image extracted from videos from all three
runs (1+2+3) and pseudo-labeled with GroundingDINO ei-
ther with box and text threshold set to 0.2 / 0.2 or 0.3 / 0.3.
The mean average precision (mAP) is calculated over all
ten classes with an IoU threshold for correct detections at
0.5 (mAP@0.5). TP: True Positive, FP: False Positive,
FN: False Negative.
Dataset mAP TP FP FN
1+2+3@0.2 0.56 866 733 1342
1+2+3@0.3 0.77 575 96 1633
Table 5: Evaluation Results for YOLOv8s trained on
datasets with every fifth image (3 Hz) and every fifteenth
image (1 Hz) extracted from videos from all three runs
(1+2+3) and pseudo-labeled with GroundingDINO at box
and text threshold set to 0.3 / 0.3. The mean average pre-
cision (mAP) is calculated over all ten classes with an IoU
threshold for correct detections at 0.5 (mAP@0.5).
Dataset mAP TP FP FN
1+2+3@3Hz 0.77 575 96 1633
1+2+3@1Hz 0.73 557 107 1651
tal 364 images, are shown. The performance of
YOLOv8s@0.3 decreased slightly with the decreas-
ing number of images in the 1 Hz training dataset.
The higher number of images is thus beneficial. Due
to the quite similar performance of YOLOv8s@0.3
trained on the 3 Hz dataset compared to Ground-
ingDINO with thresholds at 0.3, we expect that in-
creasing the number of extracted images for training
further does not lead to a significantly increased per-
formance.
Table 6 shows the results of the consecutive adap-
tion with the addition of data and information from
the successive runs. All datasets consist of every
fifth image (3 Hz) extracted from the corresponding
video. The last row (1+2+3+O) shows the results for
a dataset, to which additionally to the self-captured
images and pseudo-labels, training data from a dataset
available online (Arduengo et al., 2021) was included.
Only manually-labeled training data for the classes
”door” and ”handle” was included from the online
dataset, in total 928 images with annotations.
Table 6: Evaluation Results for YOLOv8s trained on
datasets with every fifth image successively extracted from
the three videos (1, 2, 3) and pseudo-labeled with Ground-
ingDINO with box and text threshold set 0.3 / 0.3. The last
row (1+2+3+O) shows the results of additional adding data
from a manual-labeled online dataset (O) for the classes
”door” and ”handle”. The mean average precision (mAP)
is calculated over all ten classes with an IoU threshold for
correct detections at 0.5 (mAP@0.5). TP: True Positive,
FP: False Positive, FN: False Negative
Dataset mAP TP FP FN
1 0.74 559 99 1649
1+2 0.75 592 109 1616
1+2+3 0.77 575 96 1633
1+2+3+O 0.74 598 116 1610
The performance of YOLOv8s increases slightly
with a growing dataset. Thus, continuously adding
new data from the same environment seems bene-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
860

ficial. However, it should be investigated in future
work, to which extent this effect is observable. To
benefit from continuously generated new data dur-
ing detector training, methods from the field of con-
tinuous learning seem promising. Especially replay-
based methods (Lesort et al., 2020) and dataset dis-
tillation methods (Yu et al., 2024) appear suitable for
the setting investigated in this paper.
However, adding data from the online dataset did
not improve the detector’s performance. When look-
ing at the detection results of the two classes ”door”
and ”handle” in detail, only a minimal improvement
compared to the training without online data is visi-
ble. This may be due to the fact that the evaluation
dataset is based on the same environment as the train-
ing dataset and a not optimal class balance in the re-
sulting training dataset.
5 CONCLUSION AND FUTURE
WORK
To achieve the goal of fully automated environment-
specific object detector adaptation for mobile robots,
we proposed and investigated an automated method
for relevant object class identification, pseudo-
labeling the dataset with bounding box annotations
for the identified classes using a VLM and finally
training a lightweight object detector with the pseudo-
labeled dataset. We critically evaluated and discussed
each step of the processing pipeline. We have gained
the following key insights from the work in this paper:
• VLMs, more specifically GPT-4o, can be used
to identify relevant object classes in an image
dataset. However, some objects are not identified,
even when visible in several images of the dataset.
Preliminary experiments of providing patches of
an image containing one object to be identified
as salient object have shown promising results to
identify all objects at a high rate. Nevertheless,
the missing context in the patches leads to some
misclassifications.
• LLMs can be used to merge variations and syn-
onyms of a class to one consistent class label.
Further, a rule-based merging of different ob-
ject classes (e.g., room names) to one class label
was successfully demonstrated. However, the re-
sponse of GPT-4o to our merging prompt regu-
larly varied. Thus, only a ”statistical” selection of
class merging schemes was successful for us. On
the one hand, a more detailed prompt including
which classes should be merged based on given
rules, compared to our quite general prompt could
partially resolve this issue, cf. (Vemprala et al.,
2024). On the other hand, we see the difficulty of
consistently resolving semantic ambiguities and
granularity using LLMs due to the varying re-
sponses to the same input prompt. Further aspects
like prompt brittleness (Kaddour et al., 2023) and
missing uncertainty quantification for responses
(Firoozi et al., 2024) should be also considered in
future work. Also, the use of further prior infor-
mation, like ontologies of relevant object classes,
in combination with the LLM may help to over-
come semantic ambiguities.
• GroundingDINO showed no good results in de-
tecting the identified relevant classes in our indi-
vidual setting and thus also provided quite poor
bounding-box annotations as pseudo-labels. We
assume that this is caused in parts by the diffi-
culty of resolving semantic ambiguities and gran-
ularity (”cabinet door”). More detailed input text
prompts may improve the results. Further, inte-
grating an automated annotation verification using
another VLM, like presented in (Kim et al., 2024),
seems promising to improve the quality of the
pseudo-labels. Thus, GroundingDINO with lower
threshold values could be used to obtain more true
positives while sorting out the high number of
false positives with a verification VLM.
• Training a lightweight object detector, in this pa-
per YOLOv8s, using the pseudo-labeled dataset
worked well. We observed a quite good
”knowledge distillation” from GroundingDINO
to YOLOv8s via the pseudo-labeled dataset for
our specific environment.
• In future work, we plan to improve and extend
the proposed method with a VLM to verify the
pseudo-labels, a way to automatically generate
more pseudo-labels through simulations or gen-
erative neural networks, and to investigate the ap-
proach in different environments with less com-
mon object classes.
ACKNOWLEDGEMENTS
This work was supported by the research projects
BauKIRo and K3I-Cycling. The research project
BauKIRo (22223 BG) is funded by the Federal Min-
istry for Economic Affairs and Climate Action based
on a resolution of the German Bundestag. The re-
search project K3I-Cycling (033KI216) is funded by
the Federal Ministry of Education and Research based
on a resolution of the German Bundestag.
Automated Individualization of Object Detectors for the Semantic Environment Perception of Mobile Robots
861

REFERENCES
Arduengo, M., Torras, C., and Sentis, L. (2021). Robust and
adaptive door operation with a mobile robot. Intelli-
gent Service Robotics, 14(3):409–425.
Cheng, T., Song, L., Ge, Y., Liu, W., Wang, X., and Shan,
Y. (2024). Yolo-world: Real-time open-vocabulary
object detection. In 2024 IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 16901–16911. IEEE.
Firoozi, R., Tucker, J., Tian, S., Majumdar, A., Sun, J.,
Liu, W., Zhu, Y., Song, S., Kapoor, A., Hausman, K.,
Ichter, B., Driess, D., Wu, J., Lu, C., and Schwager,
M. (2024). Foundation models in robotics: Applica-
tions, challenges, and the future. The International
Journal of Robotics Research.
Gallagher, J. (2023). Distill large vision mod-
els into smaller, efficient models with autodis-
till. Retrieved 21.10.2024 from Roboflow Blog:
https://blog.roboflow.com/autodistill/.
Gao, M., Xing, C., Niebles, J. C., Li, J., Xu, R., Liu, W.,
and Xiong, C. (2022). Open vocabulary object detec-
tion with pseudo bounding-box labels. In Avidan, S.,
Brostow, G., Ciss
´
e, M., Farinella, G. M., and Hassner,
T., editors, Computer Vision – ECCV 2022, volume
13670 of Lecture Notes in Computer Science, pages
266–282. Springer Nature Switzerland, Cham.
Han, K., Rebuffi, S.-A., Ehrhardt, S., Vedaldi, A., and Zis-
serman, A. (2022). Autonovel: Automatically dis-
covering and learning novel visual categories. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 44(10):6767–6781.
Han, K., Wang, Y., Chen, H., Chen, X., Guo, J., Liu, Z.,
Tang, Y., Xiao, Xu, C., Xu, Y., Yang, Z., Zhang, Y.,
and Tao, D. (2023). A survey on vision transformer.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 45(1):87–110.
Hofmann, C., Taliercio, F., Walter, J., Franke, J., and Re-
itelsh
¨
ofer, S. (2023). Towards adaptive environment
perception and understanding for autonomous mobile
robots. In 2023 IEEE Symposium Sensor Data Fusion
and International Conference on Multisensor Fusion
and Integration (SDF-MFI), pages 1–8. IEEE.
IDEA Research (2023). Groundingdino. Retrieved
21.10.2024 from https://github.com/IDEA-
Research/GroundingDINO.
Jocher, G., Chaurasia, A., and Qiu, J. (2023). Ul-
tralytics yolov8. Retrieved 21.10.2024 from
https://github.com/ultralytics/ultralytics.
Joseph, K. J., Khan, S., Khan, F. S., and Balasubramanian,
V. N. (2021). Towards open world object detection.
In 2021 IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 5826–5836.
IEEE.
Kaddour, J., Harris, J., Mozes, M., Bradley, H., Raileanu,
R., and McHardy, R. (2023). Challenges and applica-
tions of large language models. Retrieved 13.10.2024
from http://arxiv.org/pdf/2307.10169v1.
Kim, J., Ku, Y., Kim, J., Cha, J., and Baek, S. (2024). Vlm-
pl: Advanced pseudo labeling approach for class in-
cremental object detection via vision-language model.
In 2024 IEEE/CVF Conference on Computer Vision
and Pattern Recognition Workshops (CVPRW), pages
4170–4181. IEEE.
Lee, D.-H. et al. (2013). Pseudo-label: The simple and effi-
cient semi-supervised learning method for deep neural
networks. In Workshop on challenges in representa-
tion learning, ICML, volume 3, page 896.
Lesort, T., Lomonaco, V., Stoian, A., Maltoni, D., Fil-
liat, D., and D
´
ıaz-Rodr
´
ıguez, N. (2020). Continual
learning for robotics: Definition, framework, learning
strategies, opportunities and challenges. Information
Fusion, 58:52–68.
Liu, S., Zeng, Z., Ren, T., Li, F., Zhang, H., Yang,
J., Jiang, Q., Li, C., Yang, J., Su, H., Zhu, J.,
and Zhang, L. (2023). Grounding dino: Mar-
rying dino with grounded pre-training for open-
set object detection. Retrieved 13.10.2024 from
http://arxiv.org/pdf/2303.05499v5.
OpenAI (2024). Gpt 4o. Retrieved 21.10.2024 from
https://openai.com/index/hello-gpt-4o/.
Sun, T., Lu, C., and Ling, H. (2022). Prior knowledge
guided unsupervised domain adaptation. In Avidan,
S., Brostow, G., Ciss
´
e, M., Farinella, G. M., and Has-
sner, T., editors, Computer Vision – ECCV 2022, vol-
ume 13693 of Lecture Notes in Computer Science,
pages 639–655. Springer Nature Switzerland, Cham.
Vaze, S., Hant, K., Vedaldi, A., and Zisserman, A. (2022).
Generalized category discovery. In 2022 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 7482–7491. IEEE.
Vemprala, S. H., Bonatti, R., Bucker, A., and Kapoor, A.
(2024). Chatgpt for robotics: Design principles and
model abilities. IEEE Access, 12:55682–55696.
Wang, Z., Li, Y., Chen, X., Lim, S.-N., Torralba, A.,
Zhao, H., and Wang, S. (2023). Detecting everything
in the open world: Towards universal object detec-
tion. In 2023 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 11433–
11443. IEEE.
Wu, J., Li, X., Xu, S., Yuan, H., Ding, H., Yang, Y., Li,
X., Zhang, J., Tong, Y., Jiang, X., Ghanem, B., and
Tao, D. (2024). Towards open vocabulary learning:
A survey. IEEE transactions on pattern analysis and
machine intelligence, 46(7):5092–5113.
Yu, R., Liu, S., and Wang, X. (2024). Dataset distillation: A
comprehensive review. IEEE transactions on pattern
analysis and machine intelligence, 46(1):150–170.
Zhao, Z.-Q., Zheng, P., Xu, S.-T., and Wu, X. (2019). Ob-
ject detection with deep learning: A review. IEEE
transactions on neural networks and learning systems,
30(11):3212–3232.
Zhu, C. and Chen, L. (2024). A survey on open-vocabulary
detection and segmentation: Past, present, and future.
IEEE transactions on pattern analysis and machine
intelligence, PP.
Zimmerman, N., Guadagnino, T., Chen, X., Behley, J., and
Stachniss, C. (2023). Long-term localization using se-
mantic cues in floor plan maps. IEEE Robotics and
Automation Letters, 8(1):176–183.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
862
