
Distribution Controlled Clustering of Time Series Segments by Reduced
Embeddings
G
´
abor Sz
˝
ucs
a
, Marcell Bal
´
azs T
´
oth
b
and Marcell N
´
emeth
c
Budapest University of Technology and Economics, Department of Telecommunications and Artificial Intelligence, Hungary
Keywords:
Clustering, Time Series Segments, Kolmogorov–Smirnov Test, COP-KMeans, Clustering Evaluation,
Confidence Score.
Abstract:
This paper introduces a novel framework for clustering time series segments, addressing challenges like tem-
poral misalignment, varying segment lengths, and computational inefficiencies. The method combines the
Kolmogorov–Smirnov (KS) test for statistical segment comparison and adapted COP-KMeans for clustering
with temporal constraints. To enhance scalability, we propose a basepoint selection strategy for embedding
the time series segments that reduces the computational complexity from O(n
2
) to O(n · b) by limiting com-
parisons to representative basepoints. The approach is evaluated on diverse time series datasets from domains
such as motion tracking and medical signals. Results show improved runtime performance over traditional
methods, particularly for large datasets. In addition, we introduce a confidence score to quantify the reliability
of cluster assignments, with higher accuracy achieved by filtering low-confidence segments. We evaluated
clustering performance using the Rand Index (RI), Adjusted Rand Index (ARI), and Normalized Mutual Infor-
mation (NMI). Our results demonstrate advantageous properties of the method in handling noise and different
time series data, making it suitable for large scale applications.
1 INTRODUCTION
Time series clustering is a crucial task in machine
learning with applications across various domains,
including finance, healthcare, and industry. It in-
volves grouping similar sequences of data points that
evolve over time. However, this process poses chal-
lenges due to temporal dependencies and varying seg-
ment lengths. Traditional methods, such as whole
time series and subsequence clustering (Aghabozorgi
et al., 2015; Zolhavarieh et al., 2014; Caiado et al.,
2015; Fujimaki et al., 2008), either struggle with large
datasets or fail to account for such complexities.
Subsequence clustering, which partitions a long
time series into segments for clustering, is particularly
relevant for identifying recurring patterns in datasets.
However, existing approaches often have difficulty in
dealing with temporal misalignment and variability in
segment length. Furthermore, at large datasets, the
computational inefficiency of traditional clustering al-
gorithms is a significant limitation.
a
https://orcid.org/0000-0002-5781-1088
b
https://orcid.org/0009-0007-7136-314X
c
https://orcid.org/0009-0002-2835-0363
In this paper, we propose a novel clustering frame-
work that integrates the Kolmogorov-Smirnov (KS)
test (Kolmogorov, 1933) for statistical comparison
of segments to address temporal misalignment. To
further enhance clustering, we apply COP-KMeans
(Wagstaff et al., 2001), incorporating pairwise con-
straints to ensure that consecutive time series seg-
ments are not assigned to the same cluster, thereby
preserving their temporal independence. Our method
effectively handles large datasets while maintaining
accuracy. The key contributions of this paper are:
• A new subsequence clustering method combining
KS test statistic and adapted constrained cluster-
ing algorithm (COP-KMeans) for flexible time se-
ries segment clustering.
• A reduced-embedding-based clustering method
with base point selection to decrease computa-
tional complexity.
• Comprehensive experimental results demonstrat-
ing the method’s efficiency and accuracy on di-
verse datasets.
• A confidence score to quantify the reliability
of cluster assignments, where higher accuracy
achieved by filtering low-confidence segments.
SzÅ
´
scs, G., Tóth, M. B. and Németh, M.
Distribution Controlled Clustering of Time Series Segments by Reduced Embeddings.
DOI: 10.5220/0013162700003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 43-54
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
43

The remainder of this paper is organized as fol-
lows: Section 2 reviews related work, Section 3 ex-
plains the theoretical foundations, Section 4 and Sec-
tion 5 detail the proposed approach, and Section 6
presents experimental results and in the Section 7 we
draw the conclusions.
2 RELATED WORKS
The literature on time series clustering can be clas-
sified into three main categories: whole time series,
subsequence, and time-point clustering (Aghabozorgi
et al., 2015; Zolhavarieh et al., 2014).
Whole time series clustering involves clustering a
set of individual time series (where each time series
is treated as a distinct instance for the clustering algo-
rithm) based on their similarity. This category has the
most extensive body of research and can be further di-
vided into three subcategories: shape-based, feature-
based, and model-based approaches.
In the shape-based approach (Meesrikamolkul
et al., 2012; Li et al., 2022), the shapes of two time
series are aligned as closely as possible by apply-
ing non-linear stretching and contracting along the
time axes. In the feature-based approach (Hautamaki
et al., 2008), raw time series data are transformed into
lower-dimensional feature vectors, which are then
used as inputs for traditional clustering algorithms.
Finally, in model-based methods (Liao, 2005), the
raw time series are converted into model parameters,
and clustering is performed based on these extracted
parameters using an appropriate distance measure.
Subsequence clustering (Keogh and Lin, 2005;
Zolhavarieh et al., 2014) focuses on clustering subse-
quences extracted from a single long time series, typi-
cally through a sliding window or other segmentation
techniques. The goal is to cluster these segments, and
this is the primary focus of our paper.
Time-point clustering (M
¨
orchen et al., 2005; Ertl
et al., 2021), the third category, involves clustering
individual time points based on their temporal prox-
imity and the similarity of their corresponding values.
This method is similar to time series segmentation but
allows for some points to remain unclustered, treating
them as noise.
Several methods have been proposed for subse-
quence clustering. For example, the MDL framework
(Rakthanmanon et al., 2012) is a highly efficient ap-
proach for time series clustering and can be applied
to data streams. Building on this foundational work,
Li et al. (Li et al., 2012) developed a methodology
to discover approximate time series motifs of varying
lengths using a compression algorithm.
Some researchers have proposed selective cluster-
ing of subsequences, emphasizing that subsequence
clustering is more meaningful when noisy or irrel-
evant subsequences are ignored and when subse-
quences of varying lengths are considered (Rodpong-
pun et al., 2012). Another approach by Yang (Yang
and Wang, 2014) introduced the phase shift weighted
spherical K-means algorithm (PS-WSKM) for clus-
tering unsynchronized time series.
Rakthanmanon et al. (Rakthanmanon et al., 2013)
demonstrated that time series clustering using Dy-
namic Time Warping (DTW) is significantly faster
than methods relying on Euclidean distance.
However, one of the major challenges in sub-
sequence time series clustering is handling large
datasets with numerous segments. Most previous re-
search has focused on relatively small datasets, but as
the number of segments grows, traditional algorithms
become inefficient and slow. Our goal in this paper
is to accelerate these processes, making them suitable
for large scale industrial applications.
3 THEORETICAL OVERVIEW
In this section, we explore the key concepts, algo-
rithms, and methodologies that formed the foundation
of our research. A crucial aspect of analyzing time
series data is comparing segments to determine their
degree of similarity; this requires the application of
statistical tests.
3.1 Kolmogorov-Smirnov Test
The Kolmogorov-Smirnov (K-S) (Kolmogorov, 1933)
test and the Anderson-Darling (Anderson and Dar-
ling, 1952) test are commonly used to compare the
distributions of two samples to determine if they come
from the same distribution. The K-S test calculates
the maximum difference between their empirical cu-
mulative distribution functions (ECDFs):
F
X
(x) =
1
n
1
n
1
∑
i=1
1
[x
i
≤x]
, F
Y
(y) =
1
n
2
n
2
∑
i=1
1
[y
i
≤y]
(1)
The K-S statistic D is the maximum absolute dif-
ference between the ECDFs:
D = sup
|
F
X
(x) − F
Y
(x)
|
(2)
The p-value quantifies the probability of observ-
ing a test statistic as extreme as the observed D, or
more extreme, under the assumption that the null hy-
pothesis is true. The complexity of the K-S test is
O(nlogn), where n = n
1
+ n
2
.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
44

The K-S test is distribution-free, as its critical val-
ues do not depend on the specific distribution. This
makes it computationally simpler and versatile. It ex-
cels at detecting differences near the center of dis-
tributions, which aligns with the focus of this study.
In contrast, the Anderson-Darling test is more sensi-
tive to differences in the tails of distributions but relies
on the specific distribution for critical values, limiting
its generalizability when such information is unavail-
able. Given the need for a robust and adaptable test,
the K-S test is better suited to this application.
3.2 COP-KMeans
COP-KMeans (Wagstaff et al., 2001) extends K-
means by incorporating pairwise constraints:
• Must-link: Points must be in the same cluster.
• Cannot-link: Points cannot be in the same cluster.
During assignment, points are assigned to the
nearest centroid while respecting these constraints.
The complexity is similar to K-means, O(t · n · k),
where t is the number of iterations until defined con-
vergence criteria, n is the number of samples and k is
the number of desired clusters.
3.3 Key Metrics for Clustering
Evaluation
Several metrics are used to evaluate clustering perfor-
mance, especially when multiple labels are present.
Key metrics include the Rand Index (RI) (Rand,
1971), Adjusted Rand Index (ARI) (Hubert and
Arabie, 1985), and Normalized Mutual Information
(NMI) (Vinh et al., 2009).
Rand Index (RI) measures the proportion of cor-
rectly classified pairs of samples. It ranges from 0 to
1, where 1 indicates perfect agreement.
RI =
a + d
a + b + c + d
(3)
where a and b are the number of pairs correctly and
incorrectly clustered together; c and d are the num-
ber of pairs incorrectly and correctly clustered apart,
respectively.
Adjusted Rand Index (ARI) adjusts the RI by ac-
counting for chance. It ranges from -1 to 1, with 1
indicating perfect agreement.
ARI =
RI − E[RI]
max(RI) − E[RI]
(4)
where E[RI] is the expected RI under random cluster-
ing.
Normalized Mutual Information (NMI) measures
the mutual information between two clusterings, nor-
malized to account for different cluster sizes. It ranges
from 0 to 1, where 1 indicates perfect correlation.
NMI(U,V ) =
2 · I(U;V )
H(U ) + H(V )
(5)
where I(U ;V ) is the mutual information, and H(U)
and H(V ) are the entropies of the clusterings U and
V .
These metrics provide insights into clustering per-
formance, with ARI and NMI useful for comparing
results against ground truth or when cluster sizes vary.
4 PROPOSED CLUSTERING
METHOD WITH FULL
EMBEDDING
In this section, we present a novel clustering method
designed for time-varying segments characterized by
inhomogeneous lengths and temporal misalignment.
The proposed approach integrates a feature extrac-
tion process using the Kolmogorov-Smirnov (KS)
test to quantify statistical differences between seg-
ment distributions, followed by embedding construc-
tion and clustering using the Constrained K-means
(COP-KMeans) algorithm. Our approach ensures that
consecutive segments are assigned to distinct clusters,
respecting their temporal dependencies.
4.1 Problem Formulation
Clustering time-varying segments introduces signifi-
cant challenges due to two key factors:
• Temporal Misalignment: Segments may exhibit
significant shifts along the time axis, making di-
rect comparison difficult.
• Inhomogeneous Lengths: The segments may have
varying lengths, further complicating distance-
based clustering methods.
To address these challenges, our proposed method
focuses on extracting features that capture distribu-
tional differences, independent of temporal alignment
or length variation.
The time-varying segments {s
1
, s
2
, . . . , s
n
} are de-
rived by dividing the continuous time series into
non-overlapping, variable-length segments. The seg-
mentation is guided by domain-specific events or
changes in the signal, such as sharp transitions or
activity boundaries, ensuring that each segment cap-
tures a meaningful portion of the underlying dynam-
ics (Guijo-Rubio et al., 2021).
Distribution Controlled Clustering of Time Series Segments by Reduced Embeddings
45

Given these segments, where each segment s
i
has
an associated length l
i
, our goal is to cluster them into
K distinct clusters. This is achieved by construct-
ing meaningful embeddings for each segment based
on distributional similarity, allowing robust cluster-
ing even in the presence of temporal misalignment or
length variation.
4.2 Embedding Construction Using
Kolmogorov-Smirnov Test Statistic
To generate appropriate embeddings, we begin by
quantifying the statistical differences between each
pair of segments. For this, we employ the
Kolmogorov-Smirnov (KS) test, a non-parametric test
that compares two sample distributions. The KS test
statistic for two segments s
a
and s
b
, with lengths l
a
and l
b
, is defined as:
D
KS
(s
a
, s
b
) = sup|F
a
(t) − F
b
(t)| (6)
where F
a
(t) and F
b
(t) represent the empirical cumu-
lative distribution functions (ECDFs) of segments s
a
and s
b
, respectively. The KS statistic D
KS
(s
a
, s
b
)
measures the maximum difference between the two
ECDFs, offering a robust means of comparing the sta-
tistical distributions of the segments, irrespective of
their length or alignment.
Once the KS test statistic has been computed for
all pairs of segments, the corresponding p-values are
derived to evaluate the null hypothesis that the com-
pared segments are drawn from the same distribution.
These p-values are then used to construct an embed-
ding vector x
i
for each segment s
i
. Each component
of x
i
captures the likelihood that the KS test statis-
tic D
KS
(s
j
, s
i
) falls below a predefined threshold d.
Formally, the embedding vector for segment s
i
is ex-
pressed as:
x
i
=
h
P(D
KS
(s
1
, s
i
) < d), P(D
KS
(s
2
, s
i
) < d),
. . . , P(D
KS
(s
n
, s
i
) < d)
i
(7)
These embeddings encapsulate the statistical re-
lationship of segment s
i
with all other segments, ef-
fectively reducing the original time series data into
a feature space based on pairwise distributional dif-
ferences. The dimensionality of each embedding is
equal to n, the total number of segments.
4.3 Clustering with Adapted
COP-KMeans
While standard clustering algorithms like K-means
could be applied to these embeddings, they do not
take into account the temporal structure of the data,
where consecutive segments should belong to distinct
clusters. To address this, we use the Constrained
K-means (COP-KMeans) algorithm (Wagstaff et al.,
2001), which incorporates pairwise constraints to
guide the clustering process.
4.3.1 COP-KMeans Algorithm
COP-KMeans operates similarly to the traditional K-
means algorithm but incorporates two types of con-
straints:
• Must-Link Constraint: Enforces that certain pairs
of data points must belong to the same cluster.
• Cannot-Link Constraint: Ensures that certain
pairs of data points must belong to different clus-
ters.
In our context, the cannot-link constraint is ap-
plied to consecutive segments to prevent them from
being grouped into the same cluster. This constraint
reflects the temporal dependency between consecu-
tive segments, ensuring that segments that are adja-
cent in time are not grouped together, as they are
likely to represent distinct temporal phenomena.
4.3.2 Temporal Structure and Constraints
The use of cannot-link constraints based on temporal
adjacency ensures that consecutive segments, which
are known to belong to different clusters, are assigned
to distinct groups.
Let s
t
and s
t+1
represent two consecutive seg-
ments. The cannot-link constraint ensures:
Cluster(s
t
) ̸= Cluster(s
t+1
) (8)
This constraint is enforced during the assignment
step of the COP-KMeans algorithm, ensuring that the
temporal structure of the data is preserved in the clus-
tering process. In our context, the cannot-link con-
straint is applied to consecutive segments to prevent
them from being grouped into the same cluster. This
constraint reflects the temporal dependency between
consecutive segments, ensuring that segments adja-
cent in time are not grouped together, as they likely
represent distinct temporal phenomena.
This assumption is justified by prior knowledge of
changepoints between segments, which we have iden-
tified using proxy methods. These changepoints could
have been detected by any suitable time series seg-
mentation algorithm, such as ClaSP (Ermshaus et al.,
2023), and are considered available knowledge in our
research. Therefore, the subsegments are divided by
changepoints, and consecutive segments cannot be
in the same cluster, reinforcing the necessity of the
cannot-link constraint.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
46

4.3.3 Algorithm Details
Let x
i
∈ R
n
represent the embedding vector for seg-
ment i, constructed as described above. The steps for
COP-KMeans clustering are as follows:
Step 1: Initialization. Randomly initialize
K centroids {c
1
, c
2
, . . . , c
K
} from the embeddings
{x
1
, x
2
, . . . , x
n
}.
Step 2: Assignment. Assign each embedding x
i
to the nearest centroid based on Euclidean distance,
while respecting the cannot-link constraints. For each
embedding x
i
, the assignment step solves:
argmin
k
∥x
i
− c
k
∥
2
subject to constraints (9)
The cannot-link constraint ensures that the seg-
ments are assigned to different clusters.
Step 3: Centroid Update. After assigning all seg-
ments, update the centroids as the mean of the em-
beddings assigned to each cluster. For cluster k, the
updated centroid c
k
is computed as:
c
k
=
1
|C
k
|
∑
x
i
∈C
k
x
i
(10)
where C
k
represents the set of embeddings assigned
to cluster k, and |C
k
| is the number of embeddings in
that cluster.
Step 4: Iteration. Repeat Steps 2 and 3 until con-
vergence, defined as no further changes in cluster as-
signments or centroid locations.
4.3.4 Final Clustering Output
The final output of the clustering process is a set
of cluster labels {l
1
, l
2
, . . . , l
n
}, where l
i
denotes the
cluster to which segment x
i
is assigned. The clus-
ters reflect both the statistical differences between
segments, as captured by the KS test statistic, and
the temporal dependencies between consecutive seg-
ments, as enforced by the cannot-link constraints. In
summary, the proposed method offers a non-sensitive
approach to clustering time-varying segments with in-
homogeneous lengths by combining statistical feature
extraction with constrained clustering.
5 REDUCED-EMBEDDING-
BASED CLUSTERING
METHOD WITH BASEPOINTS
In this section, we present an updated approach to
address the computational challenges associated with
the construction of embedding vectors. Specifically,
we tackle the quadratic growth in dimensionality of
the embedding vectors when performing exhaustive
pairwise comparisons between segments. By utiliz-
ing a predefined set of b basepoints, we reduce the di-
mensionality of the embedding vectors and improve
computational efficiency without significantly sacri-
ficing accuracy in clustering.
5.1 Motivation for Basepoint Selection
The embedding vectors generated by performing a
Kolmogorov-Smirnov (KS) test between all pairs of
segments grow quadratically with the number of seg-
ments. This results in both an excessive computa-
tional burden and the inclusion of redundant infor-
mation. To overcome this, we propose selecting a
smaller set of representative basepoints, b, which is
significantly smaller than the total number of seg-
ments n. By limiting comparisons to these b base-
points, the dimensionality of the embeddings is re-
duced. This reduction decreases the complexity of the
algorithm from O(n
2
) to O(n · b) while retaining the
essential characteristics of the dataset.
The motivation behind the basepoint selection is
to maintain the representativeness of the clustering
space by focusing on a set of diverse basepoints. This
ensures that the essential characteristics of the dataset
are captured without performing exhaustive pairwise
comparisons.
5.2 Proposed Basepoint Selection
Strategy
The idea of the basepoint selection process comes
from k-means++ (Arthur and Vassilvitskii, 2007).
The basepoint selection process begins by randomly
selecting one segment to serve as the first basepoint.
The embedding vector’s initial value is then calcu-
lated for each segment based on this basepoint. Sub-
sequent basepoints are selected iteratively by maxi-
mizing the Euclidean distance from the previously se-
lected basepoints. This ensures that each new base-
point adds diversity and enhances the representation
of the data.
The steps of the basepoint selection process are as
follows:
1. Initialization: Select the first basepoint B[g]
randomly from the set of segments X =
{s
1
, s
2
, . . . , s
n
}, where g=1.
2. Intermediate Embedding Vector: For each seg-
ment s
i
∈ X, compute the embedding vector’s first
value, v
i
[g] = f (s
B[g]
, s
i
), where f (s
a
, s
b
) repre-
sents the distance metric and g=1.
Distribution Controlled Clustering of Time Series Segments by Reduced Embeddings
47

3. Iterative Selection: For each subsequent basepoint
B[ j] (j=2,3,...,b), calculate the Euclidean distance
between the current basepoints and all remaining
segments. Select the segment that maximizes the
minimum distance from the current basepoints:
B[ j] = arg max
x
i
min
x
B[1]
,...,x
B[ j−1]
∥x
i
− x
B[k]
∥ (11)
This iterative selection continues until b base-
points are chosen.
4. Embedding Vector Construction: For each seg-
ment s
i
∈ X, compute the embedding vector based
on the selected basepoints:
x
i
=
f (s
B[1]
, s
i
), f (s
B[2]
, s
i
), . . . , f (s
B[b]
, s
i
)
(12)
By strategically selecting basepoints in this man-
ner, we ensure that each new basepoint captures a
unique aspect of the dataset, enhancing the goodness
of the embeddings while significantly reducing com-
putational complexity.
5.3 Complexity of the Method
The overall time complexity of the proposed method
can be analyzed as follows:
• KS Test Cost: The computational cost of per-
forming the Kolmogorov-Smirnov test between
two segments of combined length L is O(L log L).
Since this test is performed between the base-
points and all segments, the total cost for this step
is O(b · n · LlogL), where b is the number of base-
points and n is the number of segments.
• Euclidean Distance Calculation: The cost of cal-
culating the Euclidean distance for each basepoint
is O(b), where b is the number of dimensions in
the embedding vector.
• Embedding Vector Construction: The cost of con-
structing the embedding vector is:
O(b·(n·L logL+b·n·b)) = O(b·n·L log L+b
3
·n)
(13)
This accounts for the KS test comparisons and
the embedding vector construction based on base-
points.
• Clustering Step: The complexity of the COP-
KMeans clustering algorithm is:
O(n · b · k ·I) (14)
where k is the number of clusters, and I is the
number of iterations required for convergence.
Thus, the total complexity of the method is:
O(b · n · L log L + b
3
· n + n · b · k · I) (15)
This formulation highlights the computational effi-
ciency gained by reducing the dimensionality of the
embeddings through basepoint selection.
5.4 Confidence Score Calculation
To further enhance the interpretability of the cluster-
ing results, we introduce a confidence score for each
segment’s assigned label. The confidence score is
based on the relative distances between the segment
and its two closest cluster centers.
The confidence score C(x
i
) for segment x
i
is de-
fined as follows:
C(x
i
) =
(
1 if d
2
(x
i
) > 2 · d
1
(x
i
)
d
2
(x
i
)−d
1
(x
i
)
d
1
(x
i
)
otherwise
(16)
where d
1
(x
i
) is the distance between x
i
and the closest
cluster center, and d
2
(x
i
) is the distance to the second
closest cluster center. The confidence score ranges
between 0 and 1:
• C(x
i
) = 1 if the second closest cluster center is
very far from the closest one, indicating high con-
fidence.
• C(x
i
) = 0 if the second closest center is as close
as the closest, indicating low confidence.
This method provides an effective way to quantify
the reliability of clustering labels, offering insights
into ambiguous or uncertain assignments. This is sim-
ilar to Silhouette Index, but in this case we quantify
nearest centroid reliability, while the Silhouette In-
dex measures intra-cluster density. We provide the
pseudo-code implementation of the proposed method
in the Algorithm 1.
6 EXPERIMENTAL RESULTS
6.1 Dataset Description
For experimental evaluation, we selected ten diverse
datasets from the Time Series Segmentation Bench-
mark (TSSB) (Ermshaus et al., 2023). These datasets
vary in domain, complexity, and length, providing a
basis for testing. The datasets include:
• Plane (PLN): Time series for plane shapes.
• NonInvasiveFetalECGThorax1 (NIFECG): Fetal
ECG signals with physiological noise.
• UWaveGestureLibraryX/All (UWGLX/All): Ac-
celerometer data capturing hand gestures.
• EOGHorizontalSignal (EOGHS): Noisy eye
movement data from electrooculography (EOG).
• ProximalPhalanxTW (PPTW): Hand bone mo-
tion.
• SwedishLeaf (SLF): Leaf outlines for shape.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
48
Algorithm 1: Basepoint Selection and Clustering
with Adapted COP-KMeans.
Data: Segments X = {s
1
, s
2
, . . . , s
n
}, Number
of basepoints b, Number of clusters k,
Distance function f (s
a
, s
b
) (i.e.
KS-test)
Result: Cluster labels L = {l
1
, l
2
, . . . , l
n
}
Initialize empty array B to store basepoints;
Select the first basepoint as the first element:
B[1] = 1;
for each segment x
i
in X do
Calculate the embedding vector’s first
value: v
i
[1] = f (s
B[1]
, s
i
);
end
for basepoint index j = 2 to b do
Find the next basepoint;
for each segment s
i
in X (including
already selected basepoints) do
Calculate Euclidean distance from the
vectors of the current basepoints
{x
B[1]
, . . . , x
B[ j−1]
};
end
Select the segment with the maximum
distance as the new basepoint:
B[ j] = arg max d(x
B[ j−1]
, x
i
);
end
for each segment s
i
in X do
Update the embedding vector:
v
i
[ j] = f (s
B[ j]
, s
i
);
end
Perform adapted COP-KMeans clustering on
the embedding vectors V = {v
1
, v
2
, . . . , v
n
};
Use constraints to ensure consecutive
segments are assigned to different clusters;
return Cluster labels L = {l
1
, l
2
, . . . , l
n
}
• Symbols (SYM): Symbolic shape representations.
• Car (CAR): Car data from driving behaviors.
• InlineSkate (INSK): Data from inline skating.
We generated larger datasets of 1,000 and 10,000
segments by randomly extracting 30–80% portions of
the original time series, introducing segment length
variability. Clustering performance was evaluated us-
ing RI, ARI, and NMI, averaged over 10 runs. Addi-
tionally, we assessed the impact of confidence-based
label removal on clustering quality by recalculating
metrics after discarding low-confidence labels.
6.2 Results of the Clustering
Performance
This section presents the results for clustering using
the ground truth number of clusters. The adapted
COP-KMeans algorithm was run more times, and the
average scores were calculated.
6.2.1 Clustering Performance with Ground
Truth Number of Clusters
The Table 1 summarizes the results for each dataset,
consisting of 1,000 segments, using the ground truth
number of clusters. The results presented are the av-
erages across ten runs of the adapted COP-KMeans
algorithm with fifty basepoints.
Table 1: Adapted COP-KMeans with 50 Basepoints.
Dataset RI (mean/std) ARI (mean/std) NMI (mean/std)
PLN 0.987/0.026 0.950/0.100 0.970/0.060
NIFECG 0.947/0.044 0.818/0.148 0.872/0.094
UWGLX 0.901/0.042 0.704/0.119 0.788/0.077
UWGLAll 0.983/0.001 0.948/0.003 0.941/0.003
EOGHS 0.680/0.020 0.202/0.047 0.259/0.028
PPTW 0.994/0.000 0.984/0.000 0.976/0.000
SLF 1.000/0.000 1.000/0.000 1.000/0.000
SYM 0.920/0.002 0.786/0.005 0.736/0.005
CAR 0.977/0.000 0.940/0.000 0.925/0.000
INSK 0.864/0.000 0.695/0.000 0.654/0.000
Average 0.925/0.014 0.803/0.042 0.812/0.027
After evaluating adapted COP-KMeans with base-
points, we perform a similar experiment without the
use of basepoints. This configuration provides insight
into how the method performs without basepoints.
In Table 2, the results show the performance when
all segments are compared to each other, removing the
basepoint constraint. This configuration is expected
to yield higher accuracy because of the comparison
of each segment, but this comes at the cost of sig-
nificantly increased computation time. The last three
columns present that the goodness indicators decrease
only slightly with the basepoints, dropping to only
97%, 89% and 91% compared to the reference.
Table 2: Clustering performance comparison of adapted
COP-KMeans without basepoints and the ratio of perfor-
mance with and without basepoints.
Dataset
No Basepoints (BP) With and w/o BP ratio (%)
RI ARI NMI RI ARI NMI
PLN 0.987 0.952 0.971 100 99.8 99.9
NIFECG 0.981 0.932 0.945 96.5 87.8 92.3
UWGLX 0.974 0.925 0.931 92.5 76.1 84.6
UWGLAll 0.985 0.952 0.942 99.9 99.5 99.5
EOGHS 0.761 0.381 0.432 89.4 53 60
PPTW 0.996 0.989 0.984 99.5 99.9 99.2
SLF 1 1 1 100 100 100
SYM 0.932 0.818 0.771 98.7 96.1 95.5
CAR 0.966 0.909 0.887 101.1 103.4 104.3
INSK 0.956 0.9 0.859 94.0 77.2 76.1
Average 0.954 0.876 0.872 96.8 89.3 91.2
Distribution Controlled Clustering of Time Series Segments by Reduced Embeddings
49
6.2.2 Effectiveness of Confidence Score in
Enhancing Clustering Performance
In this section, we analyze the distribution of con-
fidence scores within the ”Symbols” dataset to un-
derstand their relationship with clustering accuracy.
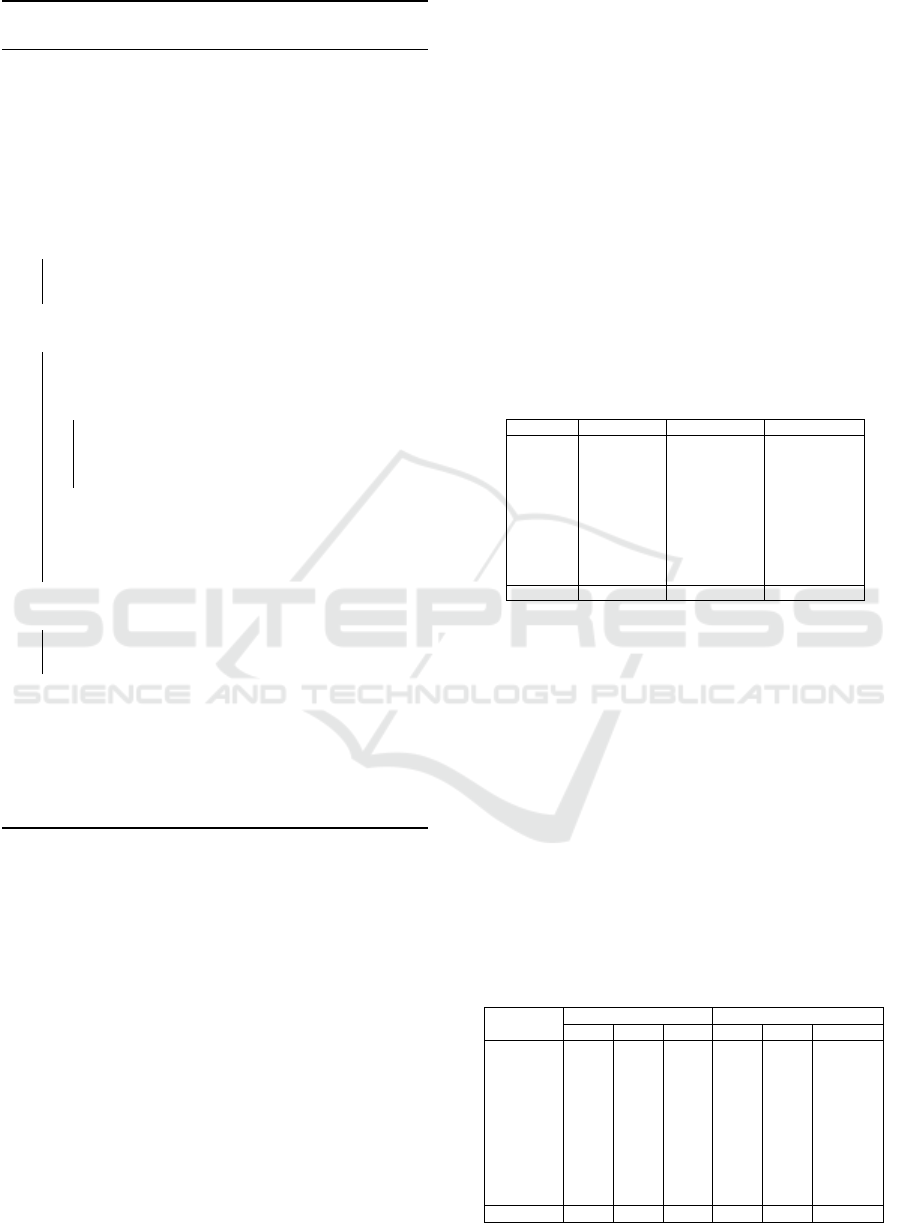
Figure 1 shows how filtering segments based on con-
fidence scores affects clustering metrics (RI, ARI,
and NMI, and the horizontal axis shows the thresh-
old of the confidence score in the filtering). As
low-confidence segments are removed, the metrics
improve significantly, indicating that segments with
lower confidence are more likely to be mislabeled.
This supports the hypothesis that higher confidence
scores correlate with better clustering accuracy, and
filtering based on confidence can enhance clustering
performance.
Figure 1: Impact of confidence score filtering on clustering
performance metrics for the ”Symbols” dataset.
6.3 Runtime Analysis
The performance of clustering algorithms is critical
not only in terms of accuracy but also computational
efficiency, especially with large datasets. In this sec-
tion, the runtime of the adapted COP-KMeans al-
gorithm is evaluated under varying conditions, com-
paring its performance with and without basepoints.
These comparisons help assess the algorithm’s scala-
bility and applicability to large scale datasets.
Table 3 compares runtimes for two configurations:
with 50 basepoints and without basepoints, all tested
on 1,000 segments. This reveals the computational
trade-offs across different setups.
Table 4 presents runtimes with 1,000 segments
and varying basepoints (from 25 to 1,000), illustrat-
ing how runtime increases with more basepoints.
Table 5 presents runtime results with a fixed num-
ber of basepoints (50) while varying the number of
segments (100, 500, 1,000, 5,000, 10,000), demon-
strating how runtime scales with dataset size.
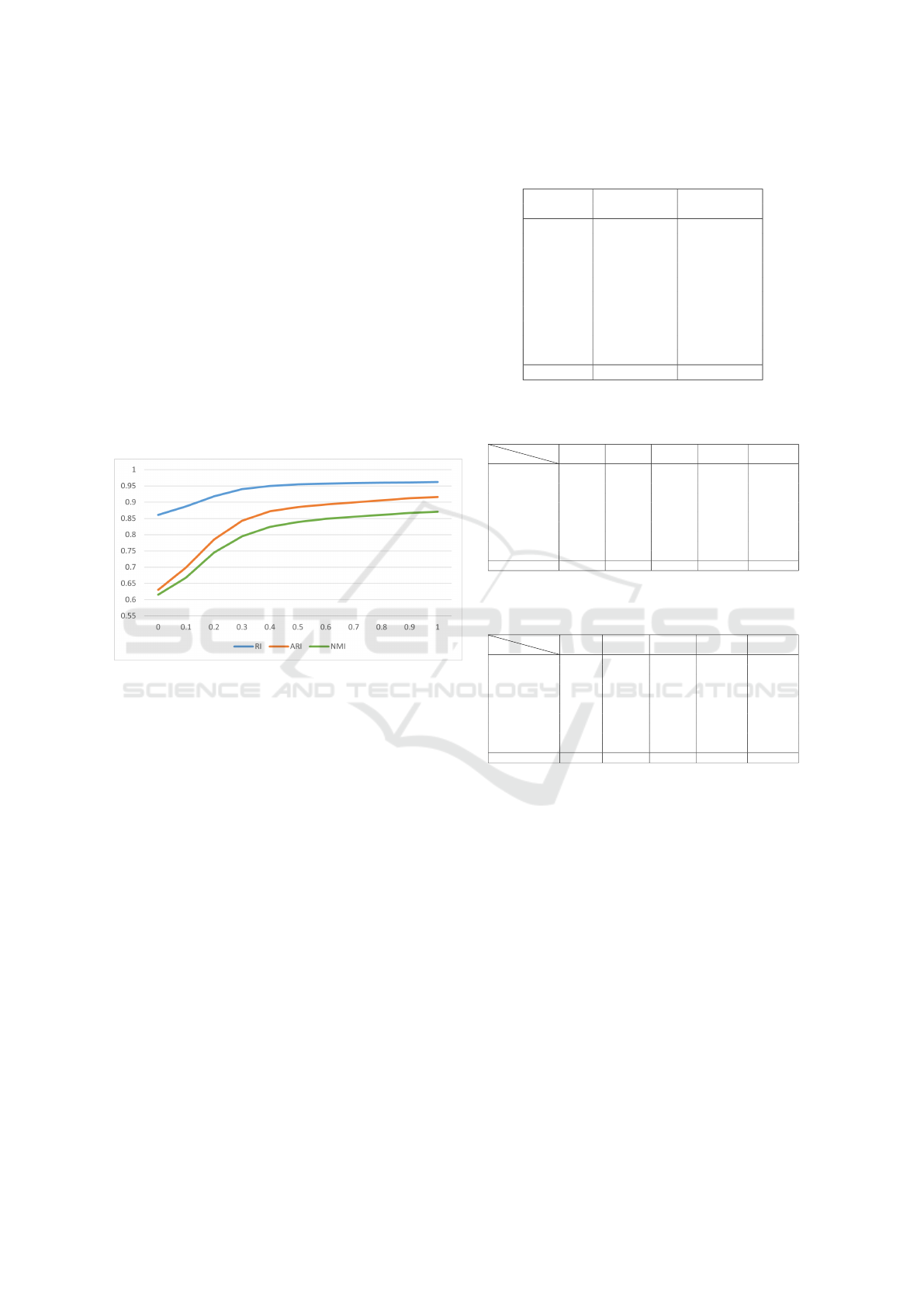
In addition, Figure 2 and 3 illustrates the average
Table 3: Runtime comparison of adapted COP-KMeans
configurations with 1,000 segments.
Dataset N × B - COP N × N - COP
(mean ± std) (mean ± std)
PLN 22.8 ± 0.6 375.4 ± 12.3
NIFECG 24.1 ± 0.4 417.3 ± 11.4
UWGLX 23.1 ± 0.7 370.4 ± 11.6
UWGLAll 23.4 ± 0.5 403.0 ± 10.0
EOGHS 23.2 ± 0.5 387.6 ± 12.2
PPTW 22.3 ± 0.3 382.9 ± 7.5
SLF 22.1 ± 0.7 374.9 ± 6.4
SYM 23.3 ± 0.7 400.8 ± 6.4
CAR 21.3 ± 0.6 363.9 ± 7.3
INSK 22.9 ± 0.4 404.0 ± 7.6
Average 22.8 ± 0.5 388.0 ± 9.3
Table 4: Runtime results with varying numbers of base-
points at a fixed dataset size of 1,000 segments.
Dataset
B
25 50 100 200 500
PLN 11.1 ± 0.6 23.7 ± 0.4 54.5 ± 0.5 142.7 ± 0.6 615.2 ± 0.7
NIFECG 11.6 ± 0.4 24.7 ± 0.3 56.9 ± 0.4 150.6 ± 0.4 659.4 ± 0.5
UWGLX 11.4 ± 0.7 23.9 ± 0.4 55.1 ± 0.4 142.6 ± 0.5 617.0 ± 0.6
UWGLAll 11.6 ± 0.5 23.8 ± 0.5 54.9 ± 0.4 146.6 ± 0.5 642.1 ± 0.5
EOGHS 11.3 ± 0.5 23.8 ± 0.4 54.1 ± 0.4 143.4 ± 0.5 630.5 ± 0.4
PPTW 11.4 ± 0.3 22.7 ± 0.4 51.4 ± 0.4 140.6 ± 0.5 617.8 ± 0.5
SLF 10.6 ± 0.7 23.0 ± 0.5 52.4 ± 0.4 140.9 ± 0.5 623.0 ± 0.5
SYM 11.8 ± 0.7 24.2 ± 0.3 54.0 ± 0.4 144.8 ± 0.5 622.3 ± 0.6
CAR 10.6 ± 0.6 22.1 ± 0.2 51.5 ± 0.5 138.0 ± 0.4 620.4 ± 0.4
INSK 11.1 ± 0.4 23.5 ± 0.4 54.9 ± 0.4 145.2 ± 0.4 636.6 ± 0.5
Average 11.3 ± 0.5 23.5 ± 0.4 54.0 ± 0.4 143.5 ± 0.5 628.4 ± 0.5
Table 5: Runtime results with a fixed number of basepoints
(50) and varying numbers of segments.
Dataset
N
100 500 1000 5000 10000
PLN 6.4 ± 0.6 14.6 ± 0.4 23.7 ± 0.4 96.5 ± 0.5 197.3 ± 0.6
NIFECG 6.3 ± 0.4 15.6 ± 0.3 24.7 ± 0.3 106.7 ± 0.4 199.8 ± 0.5
UWGLX 6.3 ± 0.7 14.4 ± 0.4 23.9 ± 0.4 96.0 ± 0.5 190.8 ± 0.6
UWGLAll 6.4 ± 0.5 14.9 ± 0.5 23.8 ± 0.5 101.6 ± 0.5 190.6 ± 0.5
EOGHS 6.4 ± 0.5 14.7 ± 0.5 23.8 ± 0.4 100.2 ± 0.5 192.4 ± 0.5
PPTW 6.3 ± 0.3 14.2 ± 0.4 22.7 ± 0.4 94.7 ± 0.5 178.2 ± 0.5
SLF 6.4 ± 0.7 14.4 ± 0.5 23.0 ± 0.5 96.1 ± 0.5 180.6 ± 0.5
SYM 6.4 ± 0.7 14.7 ± 0.3 24.2 ± 0.4 100.5 ± 0.5 184.8 ± 0.5
CAR 6.4 ± 0.6 13.9 ± 0.2 22.1 ± 0.5 92.5 ± 0.4 178.5 ± 0.4
INSK 6.4 ± 0.4 15.2 ± 0.4 23.5 ± 0.4 97.4 ± 0.4 188.5 ± 0.5
Average 6.4 ± 0.5 14.5 ± 0.4 23.4 ± 0.4 98.7 ± 0.5 188.5 ± 0.5
runtime of the adapted COP-KMeans algorithm as the
number of segments (n) and basepoints (b) vary. The
algorithm’s complexity is O(b · n · L · logL + b
3
· n +
n · b · k · I), indicating linear scaling with respect to n
and power function behavior with respect to b. The
plots confirm these trends, aligning with theoretical
expectations for runtime behavior.
6.4 Sensitivity Analysis with Noise
In real-world scenarios, time series data often con-
tains noise from environmental factors or measure-
ment errors. Evaluating a clustering method under
noisy conditions is essential to assess its stability and
reliability. By introducing noise and analyzing the im-
pact on clustering performance, we can identify both
the strengths and limitations of the method, providing
a basis for potential improvements.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
50
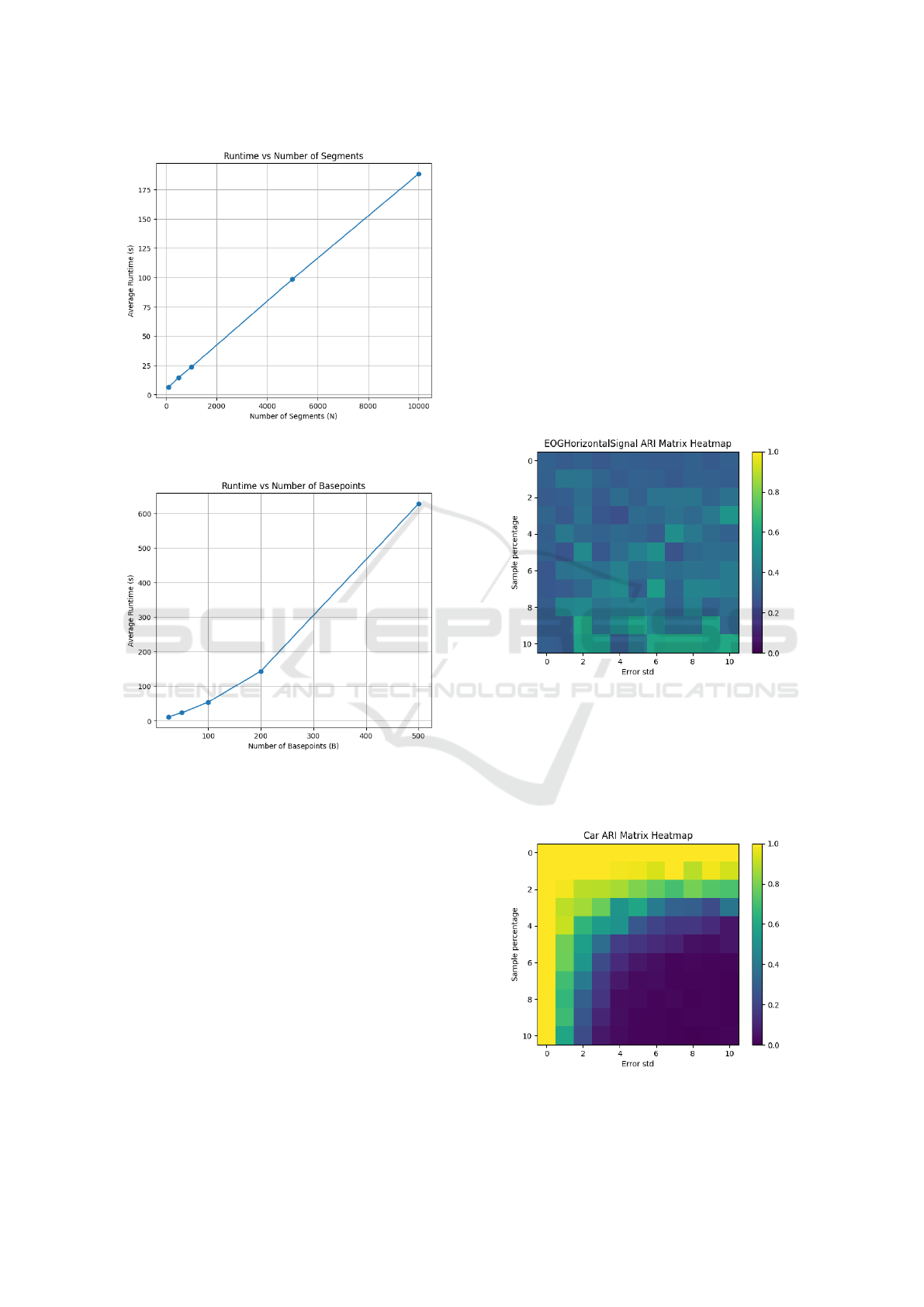
Figure 2: Average runtime of the adapted COP-KMeans al-
gorithm based on varying segments (n).
Figure 3: Average runtime of the adapted COP-KMeans al-
gorithm based on varying basepoints (b).
6.4.1 Noise Injection Strategy
To measure the sensitivity of the clustering method,
Gaussian noise is systematically injected into seg-
ments, simulating real-world sensor data imperfec-
tions. Noise is controlled by two parameters:
• Error Percentage: Defines the proportion of data
points affected by noise (e.g., 10% means 10% of
the segment is modified).
• Error Standard Deviation: Determines the magni-
tude of Gaussian noise, which has a mean of 0 and
a standard deviation ranging from 0 to 1, relative
to the segment’s data range.
Noise is incrementally applied, with both parameters
varying from 0% to 100% in 10% steps, allowing per-
formance analysis under different noise levels.
6.4.2 Results
We evaluated the impact of noise on clustering per-
formance using 11x11 ARI heatmaps, where the x-
axis represents the error standard deviation and the
y-axis indicates the sample percentage affected by
noise. The adapted COP-KMeans was run 10 times
for each configuration, with results averaged for ac-
curacy. The results fall into three main categories:
1. Low Performance Without Noise: In some
datasets, the clustering method struggles even
without noise, indicated by low ARI values across
all noise levels. Noise slightly worsens results, but
the method already fails to cluster effectively (see
Figure 4).
Figure 4: EOGHorizontalSignal dataset’s ARI heatmap.
2. High Sensitivity to Noise: Some datasets show
high clustering accuracy without noise, but per-
formance rapidly degrades as noise increases.
ARI values drop to near zero, highlighting the
method’s vulnerability to noise (see Figure 5).
Figure 5: Car dataset’s ARI heatmap.
Distribution Controlled Clustering of Time Series Segments by Reduced Embeddings
51
3. Moderate Sensitivity to Noise: Other datasets
maintain moderate accuracy as noise is intro-
duced. While ARI values decline, the method still
produces reasonable clusters, demonstrating some
resilience to noise (see Figure 6).
Figure 6: SwedishLeaf dataset’s ARI heatmap.
This analysis underscores the method’s varying
sensitivity to noise, suggesting areas for improvement
in noisy environments.
6.5 Confidence Score Analysis
In addition to evaluating ARI values, we analyzed the
confidence scores assigned to each segment. As noise
increases, the distribution of confidence scores shifts
toward zero, indicating decreased reliability in clus-
tering.
6.5.1 Confidence Score Distribution with
Increasing Noise
We examined the Car dataset with three noise levels:
• Low noise: At 20% noise, confidence scores re-
main high for most segments, indicating reliable
clustering (see Figure 7).
• Moderate noise: At 40% noise, the distribution
shifts, with more segments receiving lower confi-
dence scores, suggesting difficulties in differenti-
ating segments (see Figure 8).
• High noise: At 100% noise, confidence scores
drop significantly, with most values near zero,
highlighting the method’s struggle under high
noise conditions (see Figure 9).
Figure 7: Car dataset’s confidence distribution with 20%
noise.
Figure 8: Car dataset’s confidence distribution with 40%
noise.
Figure 9: Car dataset’s confidence distribution with 100%
noise.
6.5.2 Impact of Confidence Score Threshold on
Clustering Metrics
With 40% noise, increasing the confidence score
threshold from 0 to 1 improves clustering metrics (RI,
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
52
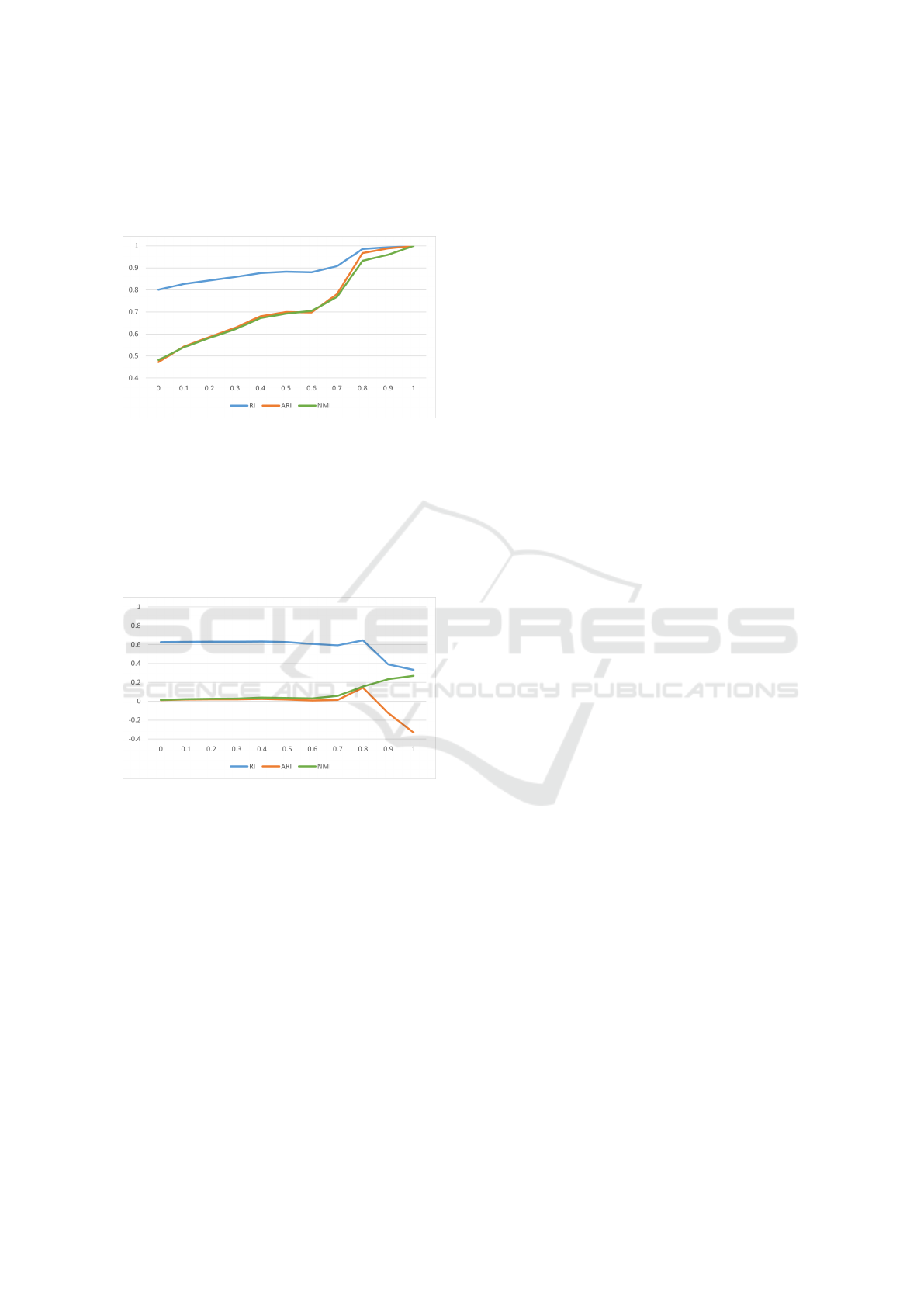
ARI, and NMI), but at the cost of discarding many
segments. This presents a trade-off between main-
taining higher confidence and retaining more data, as
shown in Figure 10.
Figure 10: Impact of confidence score filtering on clustering
performance metrics for the ”Car” dataset with 40% noise.
At 100% noise, this trend reverses; metrics do not
improve as confidence thresholds rise due to signif-
icant data loss. This illustrates that while filtering
by confidence enhances performance with moderate
noise, it becomes less effective in high-noise scenar-
ios, as demonstrated in Figure 11.
Figure 11: Impact of confidence score filtering on clustering
performance metrics for the ”Car” dataset with 100% noise.
7 CONCLUSION
In this paper, we presented a novel approach for clus-
tering time-varying segments by integrating statisti-
cal methods with constrained clustering techniques.
The primary contributions of this work include the
development of a hybrid clustering framework that
combines the Kolmogorov–Smirnov (KS) test and
adapted COP-KMeans for clustering with temporal
constraints. This approach addresses several key chal-
lenges in time series clustering, such as segment mis-
alignment, varying lengths.
The core innovation lies in using the KS test
statistic to generate distribution-based embeddings
that capture statistical differences between segments.
These embeddings provide a stable representation of
the data, independent of temporal misalignment and
length variation. Adapted COP-KMeans is then ap-
plied with cannot-link constraints, ensuring that con-
secutive segments are assigned to different clusters,
preserving their temporal structure.
To improve computational efficiency, we intro-
duced a basepoint selection strategy, reducing the di-
mensionality of the embedding space from O(n
2
) to
O(n · b). This effectively decreases the computational
complexity of the KS-based embedding construction
from O(n
2
· LlogL) to O(n · b · LlogL), where n is the
number of segments, b is the number of selected base-
points, and L is the segment length. The experimen-
tal results demonstrate that this basepoint reduction
significantly enhances runtime performance without
a substantial loss in clustering accuracy (with about
10% goodness reduction, a 17-times speed-up could
be achieved). This efficiency gain is crucial for large
scale industrial datasets, where the traditional exhaus-
tive pairwise comparison would be computationally
prohibitive.
In addition to the basepoint strategy, we intro-
duced a confidence score metric that quantifies the
reliability of clustering assignments based on the rel-
ative distances to the nearest and second-nearest clus-
ter centroids. This score provides a nuanced view of
the clustering results, allowing low-confidence labels
to be filtered out, thus improving the overall quality
of the clustering.
The performance of our method was evaluated on
a diverse set of benchmark time series datasets, in-
cluding motion data and physiological signals. We
measured clustering performance using Rand Index
(RI), Adjusted Rand Index (ARI), and Normalized
Mutual Information (NMI). The results demonstrate
that our approach consistently outperforms traditional
clustering techniques in terms of computational effi-
ciency. Furthermore, the confidence-based filtering
method provided a marked improvement in clustering
quality by discarding low-confidence assignments.
While our proposed method shows strong perfor-
mance across multiple datasets, several avenues for
future research remain open. First, the use of alterna-
tive statistical tests and distance measures could en-
hance the sensitivity of the embedding space. The
incorporation of more sophisticated alignment tech-
niques, such as shape-based clustering methods or
Dynamic Time Warping (DTW) (M
¨
uller, 2007), could
further improve the accuracy of our approach. Sec-
ond, while the basepoint selection strategy signifi-
cantly reduces the dimensionality of the embeddings,
optimizing the selection process remains an area for
Distribution Controlled Clustering of Time Series Segments by Reduced Embeddings
53

further exploration.
In conclusion, the proposed framework provides
a scalable, and interpretable solution to time series
clustering, combining statistical rigour with computa-
tional efficiency. Our method offers a significant step
forward in addressing the challenges of temporal mis-
alignment, variable segment lengths, and large dataset
scalability in time series clustering. By balancing the
theoretical rigour of statistical tests with the practical
demands of large scale data analysis, this work sets
the stage for future advancements in time series clus-
tering methodologies.
ACKNOWLEDGEMENTS
Project no. KDP-IKT-2023-900-I1-
00000957/0000003 has been implemented with
the support provided by the Ministry of Culture and
Innovation of Hungary from the National Research,
Development and Innovation Fund, financed under
the C2299763 funding scheme.
REFERENCES
Aghabozorgi, S., Shirkhorshidi, A. S., and Wah, T. Y.
(2015). Time-series clustering–a decade review. In-
formation systems, 53:16–38.
Anderson, T. W. and Darling, D. A. (1952). Asymptotic
Theory of Certain ”Goodness of Fit” Criteria Based
on Stochastic Processes. The Annals of Mathematical
Statistics, 23(2):193 – 212.
Arthur, D. and Vassilvitskii, S. (2007). K-means++: the
advantages of careful seeding. In Proc. of the 18th an-
nual ACM-SIAM symposium on Discrete algorithms,
page 1027–1035. SIAM, Philadelphia, PA, USA.
Caiado, J., Maharaj, E. A., and D’Urso, P. (2015). Time
series clustering. In Handbook of Cluster Analysis,
pages 241–263. CRC Press.
Ermshaus, A., Sch
¨
afer, P., and Leser, U. (2023). Clasp:
parameter-free time series segmentation. Data Mining
and Knowledge Discovery, 37(3):1262–1300.
Ertl, B., Meyer, J., Schneider, M., and Streit, A. (2021).
Semi-supervised time point clustering for multivari-
ate time series. In The 34th Canadian Conference on
Artificial Intelligence. Springer.
Fujimaki, R., Hirose, S., and Nakata, T. (2008). Theoretical
analysis of subsequence time-series clustering from a
frequency-analysis viewpoint. In International Con-
ference on Data Mining, pages 506–517. SIAM.
Guijo-Rubio, D., Dur
´
an-Rosal, A. M., Guti
´
errez, P. A.,
Troncoso, A., and Herv
´
as-Mart
´
ınez, C. (2021). Time-
series clustering based on the characterization of seg-
ment typologies. IEEE Transactions on Cybernetics,
51(11):5409–5422.
Hautamaki, V., Nykanen, P., and Franti, P. (2008). Time-
series clustering by approximate prototypes. In
19th International Conference on Pattern Recogni-
tion, pages 1–4. IEEE.
Hubert, L. J. and Arabie, P. (1985). Comparing partitions.
Journal of Classification, 2:193–218.
Keogh, E. and Lin, J. (2005). Clustering of time-series sub-
sequences is meaningless: implications for previous
and future research. Knowledge and Information Sys-
tems, 8:154–177.
Kolmogorov, A. (1933). Sulla determinazione empirica di
una legge di distribuzione. Giornale dell’Istituto Ital-
iano degli Attuari, 4:83.
Li, Y., Lin, J., and Oates, T. (2012). Visualizing variable-
length time series motifs. In Proceedings of the
2012 SIAM International Conference on Data Mining,
pages 895–906. SIAM.
Li, Y., Shen, D., Nie, T., and Kou, Y. (2022). A new shape-
based clustering algorithm for time series. Informa-
tion Sciences, 609:411–428.
Liao, T. W. (2005). Clustering of time series data—a survey.
Pattern Recognition, 38(11):1857–1874.
Meesrikamolkul, W., Niennattrakul, V., and Ratanama-
hatana, C. A. (2012). Shape-based clustering for time
series data. In Advances in KDDM: 16th Pacific-Asia
Conference, PAKDD, Kuala Lumpur, Malaysia, May
29-June 1, 2012, Part I, pages 530–541. Springer.
M
¨
orchen, F., Ultsch, A., and Hoos, O. (2005). Extract-
ing interpretable muscle activation patterns with time
series knowledge mining. International Journal of
Knowledge-based and Intelligent Engineering Sys-
tems, 9(3):197–208.
M
¨
uller, M. (2007). Dynamic Time Warping, pages 69–84.
Springer.
Rakthanmanon, T., Campana, B., Mueen, A., Batista, G.,
Westover, B., Zhu, Q., and Keogh, E. (2013). Ad-
dressing big data time series: Mining trillions of
time series subsequences under dynamic time warp-
ing. ACM Transactions on Knowledge Discovery from
Data (TKDD), 7(3):1–31.
Rakthanmanon, T., Keogh, E. J., Lonardi, S., and Evans, S.
(2012). Mdl-based time series clustering. Knowledge
and Information Systems, 33:371–399.
Rand, W. M. (1971). Objective criteria for the evaluation of
clustering methods. Journal of the American Statisti-
cal Association, 66(336):846–850.
Rodpongpun, S., Niennattrakul, V., and Ratanamahatana,
C. A. (2012). Selective subsequence time series clus-
tering. Knowledge-Based Systems, 35:361–368.
Vinh, N. X., Epps, J., and Bailey, J. (2009). Information the-
oretic measures for clusterings comparison: is a cor-
rection for chance necessary? In Proceedings of the
26th ICML, pages 1073–1080.
Wagstaff, K., Cardie, C., Rogers, S., and Schr
¨
odl, S.
(2001). Constrained k-means clustering with back-
ground knowledge. In Proceedings of the 18th ICML,
volume 1, pages 577–584.
Yang, T. and Wang, J. (2014). Clustering unsynchronized
time series subsequences with phase shift weighted
spherical k-means algorithm. Journal of Computers,
9(5):1103–1108.
Zolhavarieh, S., Aghabozorgi, S., and Teh, Y. W. (2014).
A review of subsequence time series clustering. The
Scientific World Journal, 2014(1):312521.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
54
