
Adaptive Prompt Tuning: Vision Guided Prompt Tuning with
Cross-Attention for Fine-Grained Few-Shot Learning
Eric Brouwer
1,2 a
, Jan Erik van Woerden
2 b
, Gertjan Burghouts
2 c
,
Matias Valdenegro-Toro
1 d
and Marco Zullich
1 e
1
Faculty of Science and Engineering, University of Groningen, Nijenborgh 9, 9747 AG, Groningen, The Netherlands
2
TNO, Oude Waalsdorperweg 63, 2597 AK, Den Haag, The Netherlands
Keywords:
CLIP, Visual Prompt Tuning, Few-Shot Learning, Fine-Grained Image Recognition, Adaptive Inference,
Uncertainty Quantification, Monte-Carlo Dropout, Expected Calibration Error.
Abstract:
Few-shot, fine-grained classification in computer vision poses significant challenges due to the need to dif-
ferentiate subtle class distinctions with limited data. This paper presents a novel method that enhances the
Contrastive Language-Image Pre-Training (CLIP) model through adaptive prompt tuning, guided by real-time
visual inputs. Unlike existing techniques such as Context Optimization (CoOp) and Visual Prompt Tuning
(VPT), which are constrained by static prompts or visual token reliance, the proposed approach leverages a
cross-attention mechanism to dynamically refine text prompts for the image at hand. This enables an image-
specific alignment of textual features with image patches extracted from the Vision Transformer, making the
model more effective for datasets with high intra-class variance and low inter-class differences. The method
is evaluated on several datasets, including CUBirds, Oxford Flowers, and FGVC Aircraft, showing signifi-
cant performance gains over static prompt tuning approaches. To ensure these performance gains translate
into trustworthy predictions, we integrate Monte-Carlo Dropout in our approach to improve the reliability of
the model predictions and uncertainty estimates. This integration provides valuable insights into the model’s
predictive confidence, helping to identify when predictions can be trusted and when additional verification is
necessary. This dynamic approach offers a robust solution, advancing the state-of-the-art for few-shot fine-
grained classification.
1 INTRODUCTION
In recent years, the field of computer vision has
experienced remarkable growth and transformation
(Alom et al., 2019), driven by significant advance-
ments in machine learning and deep learning tech-
nologies. This progress is partly attributable to the
development of large-scale pre-trained models, com-
monly referred to as foundation models. By train-
ing on extensive datasets containing millions of data,
these models are able to perform exceptionally well
even on previously unseen tasks. Among these foun-
dation models, CLIP (Contrastive Language-Image
a
https://orcid.org/0000-0003-1945-6158
b
https://orcid.org/0009-0001-3318-8148
c
https://orcid.org/0000-0001-6265-7276
d
https://orcid.org/0000-0001-5793-9498
e
https://orcid.org/0000-0002-9920-9095
Pre-Training) (Radford et al., 2021) has emerged as
a particularly influential tool. CLIP involves learning
a joint embedding space for both textual and visual
data using contrastive learning on a large corpus of
text-image pairs.
Foundation models can be fine-tuned to solve
specific downstream tasks achieving state-of-the-art
performance while often requiring fewer computa-
tional resources if compared to training a model from
scratch (Jena et al., 2022). This also translates to sit-
uations whenever data availability is limited, a situa-
tion commonly identified as zero– and few-shot learn-
ing (Lemley et al., 2017). In these cases, Deep Neu-
ral Networks trained from scratch on these limited
datasets have been shown to be severely overfitting
(Nakkiran et al., 2021). CLIP embeddings can be
used as-is (static prompting) on the downstream task
to perform zero-shot learning; additionally, the em-
beddings can be adapted to a specific dataset (dy-
114
Brouwer, E., van Woerden, J. E., Burghouts, G., Valdenegro-Toro, M. and Zullich, M.
Adaptive Prompt Tuning: Vision Guided Prompt Tuning with Cross-Attention for Fine-Grained Few-Shot Learning.
DOI: 10.5220/0013163700003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
114-125
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
Encoded
Text
Features
W
Cross
Multi-head
Attention
Sequence of
Patches
v
k
q
Add &
Norm
Feed
Forward
Add &
Norm
Tuned
Features
W'
Drop-
Out
Image Encoder
A photo of a [class].
A photo of a [class].
Text
Encoder
A photo of a [class].
K
Drop-
Out
Image
Features
Extract CLS
token
z
Text prompts
X
Cosine
Similarity
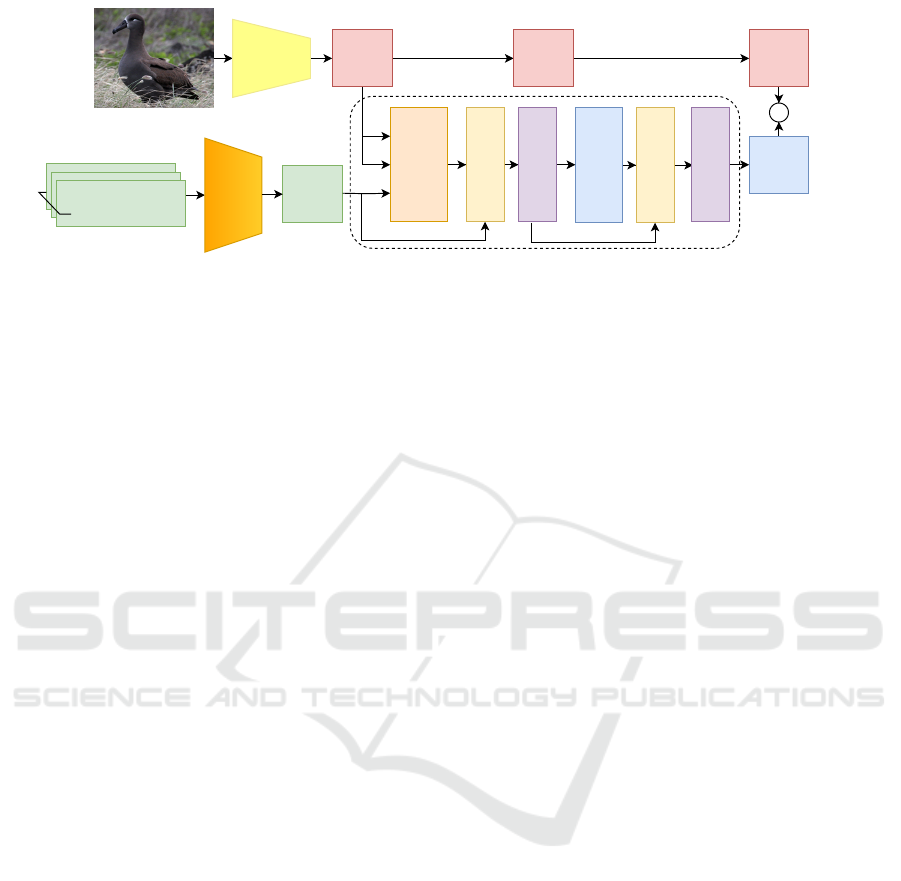
Figure 1: Overview of the proposed APT method. The method leverages CLIP’s image and text encoder to refine the text
embeddings for the few-shot classification task. The main novelty introduced by APT is the cross-attention layer, illustrated
within the dotted lines. It combines visual and text information, merging them thanks to the cross multi-head attention
operation. The resulting output is passed through normalization, dropout, a feed forward layer—responsible for adding non-
linearity to the process, and skip connections to produce a set of tuned features, which can netter fit the images at hand for
performing the few-shot classification task. This layer is the only component which is trained in the few-shot problem—the
weights of image and text encoders are frozen into their pretrained state. The tuned features are later related to the image
features using the cosine similarity (see Equation (1)) for operating the few-shot classification.
namic prompting) to perform, e.g., few-shot learning.
Previous works such as Context Optimization
(CoOp) (Zhou et al., 2022a) and Visual Prompt Tun-
ing (VPT) (Jia et al., 2022) have been explored to en-
hance CLIP for few-shot learning; however, they are
still prone to poor generalization, especially on fine-
grained classification tasks. These approaches aug-
ment the input to the model by adding a learnable
context vector or visual prompts, which are trained on
the limited few-shot dataset to improve performance.
The learnable context often becomes specialized to
these few examples and consequently, the model may
overfit. In response to these limitations, this paper
proposes Adaptive Prompt Tuning (APT), a dynamic
method that adapts prompts at inference time through
a cross-attention mechanism (Vaswani et al., 2017)
between image and text features. This approach en-
hances CLIP’s ability to align textual and visual ele-
ments in fine-grained few-shot learning, allowing it to
dynamically focus on relevant features.
In addition, we enhance APT by means of Monte-
Carlo Dropout (MCD) in order to calibrate its out-
put, showing improved confidence estimates without
drops in accuracy. Traditional Deep Neural Networks
have been shown to consistently produce overconfi-
dent outputs (Nguyen et al., 2015). The usage of tech-
niques to improve Uncertainty Quantification (UQ)
allows models to output predictions whose confidence
is comparable to their accuracy—a situation which
is instrumental in critical applications, such as med-
ical applications (Kim and Yun, 2022), thus allow-
ing underconfident predictions—which are likely to
be wrong—to be discarded, improving the reliability
of the model.
On the topic of CLIP-based few-shot segmenta-
tion, (Miao et al., 2024) are, to the best of our knowl-
edge, the only authors proposing a method for esti-
mating uncertainty on this topic. They enriched the
deterministic CLIP predictions with an ensemble of
Gaussian Processes (GPs) to induce a probability dis-
tribution on the outputs to produce the uncertainty
estimates. Despite their model being effective, GPs
are noticeable for being memory intensive, needing
the whole training dataset for generating predictions.
Our method instead uses a classical Neural Network–
based approach which needs to store only the param-
eters of the cross-attention layer, regardless of the
dataset size, to produce the uncertainty estimates.
In summary, the contribution of our papers are the
following:
• We introduce APT, a novel and competitive cross-
attention-based approach for CLIP-guided fine-
grained few-shot image classification, and
• We enhance APT using MCD, in order to produce
an analysis on the uncertainty estimates output by
APT.
Our code is available on GitHub: https://github.
com/ericbrouwer0/adaptive-prompt-tuning.
2 RELATED WORKS
Vision-Language Models. Vision-language mod-
els (VLMs) integrate computer vision and natural lan-
guage processing to jointly learn representations of
visual and textual data. By embedding images and
textual descriptions into a shared space, VLMs enable
tasks like zero-shot classification, image captioning,
and visual search without the need for task-specific
Adaptive Prompt Tuning: Vision Guided Prompt Tuning with Cross-Attention for Fine-Grained Few-Shot Learning
115

training data (Chen et al., 2020; H
´
enaff et al., 2020),
leveraging the possibility of guiding the classification
through natural-language text prompting. CLIP (Rad-
ford et al., 2021), specifically, has been shown to be
an effective model at performing image recognition
tasks in a zero– of few-shot setting, accurately cate-
gorizing images into a wide variety of classes without
direct exposure to those specific classes during train-
ing. CLIP’s image encoder processes visual inputs
into a high-dimensional feature space, while the text
encoder similarly processes textual inputs. These two
vectors are then projected into a shared embedding
space, where they can be compared directly using a
cosine similarity metric, enabling the model to make
predictions based on textual descriptions of visual cat-
egories.
Few-Shot Learning. Few-shot learning aims to en-
able models to recognize new tasks or objects with
minimal data, inspired by human cognitive abili-
ties to generalize from few examples (Wang et al.,
2020). Deep Neural Networks rely heavily on large
datasets to achieve state-of-the-art performance; how-
ever, they tend to overfit on small datasets (Nakki-
ran et al., 2021), thus often being unsuitable for few-
shot scenarios. Several methods have been proposed
to address this challenge. Meta-learning trains mod-
els across various tasks to help them quickly adapt to
new tasks with minimal data (Chen et al., 2021). Pro-
totypical networks (Snell et al., 2017) offer another
solution by learning a metric space where classifica-
tion is based on the distance to prototype represen-
tations of each class (Ding et al., 2020). More re-
cent approaches are based on fine-tuning large foun-
dation models such as CLIP, leveraging (a) the gen-
eralization capabilities of models pre-trained on vast
amounts of data and (b) the aforementioned possi-
bility of using text prompts for guiding the classifi-
cation. Prompt tuning has emerged as a viable ap-
proach to fine-tuning foundation models for few-shot
learning. Frameworks like CoOp (Zhou et al., 2022b)
enhance CLIP by learning task-specific prompt em-
beddings. Extensions like CoCoOp (Zhou et al.,
2022a) further improve robustness to unseen classes
by incorporating image features. Additionally, visual
prompt tuning (VPT) (Jia et al., 2022), which tunes
image encoders with learnable task-specific prompts,
has proven effective in low-data scenarios, preserving
generalization while minimizing the need for exten-
sive retraining or large labeled datasets.
Fine-Grained Recognition. Fine-grained image
recognition focuses on the task of distinguishing be-
tween highly similar subcategories within a larger,
general category, such as identifying specific species
of birds (Wah et al., 2011), types of cars (Dehghan
et al., 2017), or types of air-crafts (Maji et al., 2013).
This domain presents a unique set of challenges that
diverge significantly from those encountered in more
generalized image classification tasks. The nuances
and subtle differences that define each subcategory re-
quire models to develop a sense of discriminative fea-
ture detection, far beyond what is typically necessary
for distinguishing between broadly defined classes
(Peng et al., 2017) such as a car and a person.
Uncertainty Quantification. UQ plays a critical
role in assessing the confidence of machine learning
models, especially in high-stakes applications. By
evaluating the reliability of predictions, UQ helps to
identify areas where models may fail or need im-
provement, thus increasing the robustness and trust-
worthiness of AI systems. Within the framework of
Deep Learning, (approximate) Bayesian Neural Net-
works (BNNs) offer a strong framework for quanti-
fying predictive uncertainty by placing distributions
over model parameters rather than learning fixed
weights (Goan and Fookes, 2020). At inference time,
a predictive distribution—rather than a point one—is
produced, allowing for considerations on the predic-
tive uncertainty. While exact Bayesian inference is of-
ten unfeasible to implement in deep learning, approx-
imate methods, like MCD, Bayes-by-backprop (Blun-
dell et al., 2015), and Deep Ensembles (Ganaie et al.,
2022) are often used instead. Specifically, MCD (Gal
and Ghahramani, 2016) operates by using dropout as
a way of inducing stochasticity in the output. Despite
often showcasing worse UQ capability with regards
to other tools, MCD is still used due to its simplic-
ity, since it can be used straight away on architectures
which already employ Dropout (Valdenegro-Toro and
Mori, 2022). Within the field of guided prompt tun-
ing for fine-grained few-shot learning, we have only
identified one work (Miao et al., 2024) applying a
Bayesian framework, which augments the visual and
text embeddings produced by CLIP, in order to pro-
duce uncertainty estimates.
Our Contribution. In summary, the contributions
of the present work are as follows:
• We introduce a novel cross-attention based
prompt tuning mechanism that jointly optimizes
visual and text embeddings, delivering a compet-
itive or superior performance relative to the state-
of-the-art guided prompt tuning approaches.
• We conduct a comprehensive UQ analysis,
demonstrating notable improvements in the qual-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
116

ity of uncertainty estimates produced by our pro-
posed model.
3 MATERIALS AND METHODS
3.1 CLIP
The CLIP model uses a dual encoding mechanism,
one for images and another for text, aimed at learning
combined visual-textual representations. Each com-
ponent is specialized to translate its respective input
into a common feature space where the semantic con-
tents of both modalities are directly comparable.
CLIP employs two Deep Neural Networks that are
tasked with jointly encoding (image, text) pairs. The
CLIP model uses Transformer architectures for both
image and text encoding, with the main difference
being in the input processing. The image encoder
(ViT) (Dosovitskiy et al., 2020) splits the input im-
age (H,W,C) into 16 × 16 patches and linearly em-
beds them, while the text encoder tokenizes and em-
beds the input text. Both encoders then use a series
of self-attention layers to produce final encodings of
the same dimension d. (Radford et al., 2021) trained
CLIP in a self-supervised fashion on a large dataset of
text-image pairs. They employed contrastive learning
with the goal of creating an embedding space in which
positive, i.e., related, (image, text) pairs are pulled
closer together, while negative, i.e., unrelated, pairs
are pushed apart.
Zero-Shot Inference with CLIP. The setup for a
classification task can be performed by taking the fea-
tures generated by the image encoder, and using the
cosine similarity metric to compare this to a set of
encoded prompts that act as the relevant categories
(Radford et al., 2021). At the most basic approach,
a prompt can take the form of a sentence “a photo of
a [CLASS]” where [CLASS] can be a category such
as “bird” or “car”. Formally, we can define the image
encoder as f
φ
and text encoder as f
ψ
. Given an input
image x and a set of static prompts Y = {y
1
,y
2
,...,y
k
}
where k is the number of categories, the image fea-
tures z can be extracted such that z = f
φ
(x) ∈ R
d
and
text features W = f
ψ
(Y ) ∈ R
d×k
. Lastly, the predicted
category probabilities can then by computed by taking
the softmax over the cosine similarities such that:
p(y = i|x) =
exp(cos(w
i
,z)/τ)
∑
k
j=1
exp(cos(w
j
,z)/τ)
(1)
where τ is a fixed temperature hyperparameter,
cos(·,·) the cosine similarity, and y the predicted
prompt. By formulating the categories in such a way,
CLIP can effectively be used as a versatile classifica-
tion tool without task-specific training.
Few-Shot Learning with CLIP. In the few-shot
learning scenario, the goal is to adapt the CLIP model
to perform better on a target task using a limited num-
ber of labeled examples per class. To achieve this,
we introduce a learnable component into the model,
which can be fine-tuned on the few-shot training data.
This learnable component can take various forms,
such as learnable vectors added to the input prompts
(like in CoOp and VPT) or learnable layers process-
ing the visual and/or text embeddings, like in our pro-
posed method.
3.2 Adaptive Prompt Tuning
We posit a static approach to prompt tuning insuf-
ficient for datasets characterized by high intra-class
variance in the image features. As shown in Figure 2,
FGVC Aircraft is characterized by a high divergence
of baseline and fine-tuned textual prompts, indicating
a higher effectiveness of an adaptive prompting ap-
proach. Additionally, Table 1 showcases how FGVC
Aircraft has a high intra-class variance in the image
features, while having low inter-class variance, thus
being a more difficult task with regards to the other
datasets in our analysis.
To address these challenges, we propose an adap-
tive prompting technique based on the cross-attention
mechanism. This allows for real-time adjustment of
text prompts in response to relevant visual informa-
tion in the test image at hand. Figure 1 illustrates the
general architecture of the proposed model.
The architecture begins with a ViT, which pro-
cesses an input image by dividing it into a sequence
of patches that are flattened. These patches are then
encoded into image features, with the output from the
ViT including the [CLS] token, which captures the
global representation of the image.
Parallel to the ViT processing of the image, the
text encoder processes textual descriptions, typically
prompts like “A photo of a [CLASS].” Formally, the
text encoder f
ψ
maps the input text Y to text features:
W = f
ψ
(Y ) ∈ R
d×k
where d is the dimensionality of the feature space,
and k the number of classes.
The core innovation of our model lies in the cross-
attention module, where the encoded image features
are used to refine the text features dynamically based
on the visual content. The module integrates the im-
age features z extracted by the image encoder and the
Adaptive Prompt Tuning: Vision Guided Prompt Tuning with Cross-Attention for Fine-Grained Few-Shot Learning
117
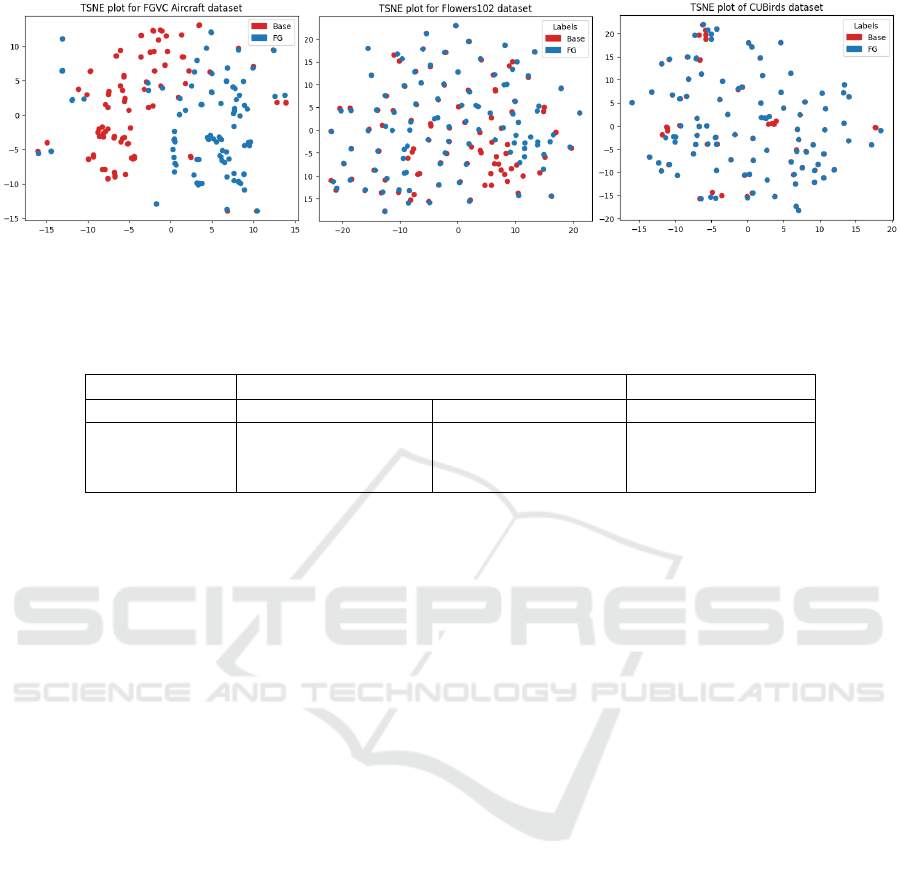
Figure 2: t-SNE plots of baseline prompts (red) versus fine-grained prompts (blue). The FGVC Aircraft dataset shows a larger
shift between embeddings, indicating greater influence of surrounding context for less familiar class words.
Table 1: Inter-class and intra-class variance for the datasets (values scaled by ×10
3
for readability). The FGVC Aircraft
dataset has higher intra-class variance and lower inter-class variance in image features, and lower inter-class variance in text
features, indicating greater classification challenges.
Image Features ×10
3
Text Features ×10
3
Dataset Intra-class Variance Inter-class Variance CLIP
CUBirds 0.278 0.260 0.800
Oxford Flowers 0.193 0.244 0.761
FGVC Aircraft 0.371 0.219 0.401
text features W extracted by the text encoder. Specif-
ically, keys k and values v are created from z, while
queries q are created from W . This mechanism al-
lows the model to focus on relevant parts of both text
and visual information, enabling dynamic adjustment
of the text prompt based on visual information.
The cross-attention module additionally includes,
as in the original implementation by (Vaswani et al.,
2017), layer normalization, a feed-forward layer—
responsible for non-linearity within the module—skip
connections, and dropout after the cross attention op-
eration and the feed-forward layer. The dropout mod-
ules, in addition to acting as a regularizer, enable us
to perform UQ with MCD.
The output of the cross-attention module is a set of
tuned text features W
′
, which provide a refined repre-
sentation optimized for downstream tasks.
3.3 Comparable Methods
CoOp. Context Optimization (Zhou et al., 2022a)
is a method for few-shot learning in conjunction with
CLIP. It utilizes the input tokens of the encoded text
prompts. Specifically, it uses the tokens of the con-
text prompt (e.g. “A photo of...”) before encoding and
makes those learnable. During training this freezes
the visual encoder, but adjusts the class embeddings to
maximize the cosine similarity between the adjusted
class embeddings and the training images of the re-
spective class. However this requires to backpropa-
gate through the full text encoder and limits the ad-
justability by the encoder itself.
VPT. Visual Prompt Tuning focuses on the visual
encoder of CLIP. Instead of fine-tuning the weights
of each transformer layer inside the encoder, it adds
additional learnable tokens to the Transformer layer
during training and inference.
X = [P
1
,.. .,P
K
,x
1
,. ..,x
N
]
Where X is the set of input token of each transformer
layer, x
n
input tokens, which can be a patch embed-
ding or an output token of the previous Transformer
layer. P is a set of learnable tokens, which is unique
for each Transformer layer.
3.4 Uncertainty Quantification with
Monte-Carlo Dropout
As explained in Section 1, UQ is essential for assess-
ing model reliability and improving decision-making
processes, especially in applications requiring high
assurance in prediction accuracy.
In particular, techniques like Monte Carlo (MC)
Dropout have not been widely applied to CLIP or sim-
ilar vision-language models.
The presence of Dropout modules into APT allow
us to implement MCD by simply avoiding to switch
off the random dropout behavior at inference time,
thus making it fully stochastic. We can use Monte-
Carlo sampling to obtain an output probability distri-
bution, which can be averaged across the sample size
to express a mean prediction ¯p.
In addition, we can express the uncertainty by
means of the entropy of the average distribution. In
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
118

order to get a relative measure of uncertainty, the con-
fidence can be computed as max
k
¯p, where the index k
is spanned across categories; the relative uncertainty
is hence defined as 1 − confidence.
The uncertainty estimates are determined to be
optimal when there is an equality between accuracy
and confidence, so prediction confidence—which is
known at inference time—can be used as a proxy for
accuracy—which is unknown in absence of labels—
thus allowing to discard potentially inaccurate predic-
tions. The assessment of the uncertainty estimates
happens qualitatively by means of reliability plots,
which plot confidence vs. accuracy. For a given val-
idation dataset, the confidence is split in bins and
the mean per-bin accuracy is computed. In a well-
calibrated model, most of the points will lie on the
diagonal line. Points below the diagonal signify over-
confidence, while points above indicate underconfi-
dence.
A quantitative evaluation of uncertainty is possi-
ble with the Expected Calibration Error (ECE), which
builds upon the setup of reliability plots. Given bins
B
1
,. ..,B
P
, ECE computes the absolute value of the
per-bin difference between accuracy and confidence,
then sums these values over the P bins:
ECE =
M
∑
p=1
|B
p
|
N
p
|
acc(B
p
) − conf(B
p
)
|
,
where acc(B
p
) and conf(B
p
) indicate, respec-
tively, the accuracy and the confidence of the data
points in bin B
p
, while N
p
indicates the number of
data points belonging to bin B
p
. An ECE approaching
0 signals a case of perfectly calibrated model, while
a high ECE points at under– or over-confidence, or a
mix of the two.
In addition to reliability plots and ECE, we pro-
duce another qualitative analysis by means of Con-
fidence vs. Uncertainty plots. Given a dataset, we
plot incorrect and correct predictions. From a visual
perspective, we would expect to see most of the in-
correct predictions in the bottom-right portion of the
plot (i.e., where uncertainty is high and confidence is
low), while correct predictions should concentrate in
the upper-left area, potentially with minimal overlap
between the two categories.
Out-of-Distribution Detection. As an additional
assessment on the uncertainty estimates, we perform
an Out-of-Distribution (OOD) detection analysis on
our model. Several works (Nguyen et al., 2015;
Valdenegro-Toro, 2021) have shown that Deep Neu-
ral Networks tend to produce extremely overconfident
predictions on OOD—sometimes even random—
data. Nevertheless, OOD data often occurs in real-
life scenarios: the presence of outliers, scenarios not
accounted for in the designing phase of a model, or
distribution shifts are all phenomena that contribute
to this factor. In the presence of OOD data, we ex-
pect our model to produce low-confidence predic-
tions. Conversely, in the case of in-distribution data,
we expect the model to output highly-confident pre-
dictions. The aim is to possibly identify ways to
tell apart OOD and in-distribution data by means of
the predictive uncertainty. We qualitatively perform
the OOD detection analysis by means of Confidence
vs. Entropy plots, where we expect to see the dis-
tribution concentrated in the bottom-right part, with
correct and incorrect predictions largely overlapping,
due to the model not having any notion of what would
constitute “correctness” in the case of an OOD data.
3.5 Datasets
To evaluate the performance of the proposed vision-
guided prompting approach, we make use of popular
datasets in the field of fine-grained few-shot classifi-
cation, each chosen for its specific characteristics and
the unique challenges it presents.
The Caltech-UCSD Birds CUBIRDS dataset
(Wah et al., 2011) contains 11 788 images across 200
categories of birds.
The Oxford Flowers dataset (Nilsback and Zis-
serman, 2008) features 8189 images of flowers split
into 103 classes, each having from 40 to 258 samples.
The FGVC Aircrafts dataset (Maji et al., 2013)
includes 10 200 pictures of aircraft divided into 102
categories, each holding 102 images.
We make use of these three datasets for assessing
the models capabilities in fine-grained classification
tasks.
Additionally, we use the Caltech101 dataset for
assessing the model OOD detection capabilities. This
dataset contains 9146 images from 101 heterogeneous
categories, featuring between 45 to 800 samples each.
3.6 Implementation Details
In our implementation, we made use of CLIP with
a ViT-B/16 image encoder. Both text and image en-
coder used multi-head attention layers with 8 heads.
As for APT specifically, we applied dropout with a
rate of 20%. While this value may technically be con-
sidered low for standard dropout, for MCD we fol-
lowed the indications by (Seoh, 2020) to keep a lower
dropout rate. We followed the standard image prepro-
cessing steps used by CLIP, as well as data augmen-
Adaptive Prompt Tuning: Vision Guided Prompt Tuning with Cross-Attention for Fine-Grained Few-Shot Learning
119

tation techniques from CoOp, and VPT, these being
random resized cropping and flipping. Also, similarly
to the CoOp and VPT set ups, we trained the models
over 50 epochs with 1 sample per class, 100 epochs
for 2 to 4 samples per class, and 150 epochs for 8
to 16 samples per class. We made use of the SGD
optimizer with a learning rate of 0.001 and a cosine
decay learning rate scheduler. For each combination
of model (APT, CoOp, VPT), dataset, and samples
per class, we repeated the training 3 times and report
the average performance attained. We performed all
experiments on one NVIDIA A100 GPU.
4 RESULTS
4.1 Few-Shot Learning
In Figure 3 we depict the results in terms of accuracy
for APT, CoOp, and VPT. As a baseline, we addition-
ally report the performance of CLIP used as a zero-
shot classifier.
Across the FGVC Aircraft dataset, which exhibits
high intra-class variance, our cross-attention model
outperformed others from 2 to 16 shots. Starting
with 27% accuracy at one shot and rising to 47% at
16 shots, it showed a significant improvement over
the Zero-shot baseline (17%). This demonstrates the
model’s ability to successfully leverage additional ex-
amples. CoOp and VPT also improved, but not as
markedly, highlighting the strength of our approach
in handling complex variations within the dataset.
In contrast, the Oxford Flowers dataset, with dis-
tinct inter-class features, showed strong performance
across models. Our model reached 84% accuracy
with one shot, improving to 97% at 16 shots. CoOp
closely followed, while VPT lagged behind. The
baseline of 72% further highlights the significant en-
hancement brought by few-shot learning. Lastly, the
CUBirds dataset, with both high inter- and intra-class
variance, revealed our model’s robustness. Starting
at 56% accuracy with one shot and reaching 77%
at 16 shots, the model outpaced CoOp and matched
the Zero-shot baseline at one shot, showing minimal
learning without additional examples.
For the Caltech101 dataset, our model did not
show significant improvement over the other fine-
tuning approaches, such as CoOp and VPT, the ex-
ception being in the 1-shot setting. The accuracy
improvements with increasing shots were relatively
modest, indicating that the dynamic nature of the
cross-attention model might not have provided a sub-
stantial advantage in this more general classification
setting. Specifically, APT showed a gradual increase
in accuracy from 93.8% at one shot to approximately
95.8% at 16 shots. This performance was comparable
to that of CoOp and VPT-deep, which also exhibited
similar improvement trends with increased shots. The
modest improvement on the Caltech101 dataset can
be explained by its more general nature compared to
fine-grained datasets like FGVC Aircraft or CUBirds.
Since the classes are more distinct and easier to dif-
ferentiate, the complexity of dynamic prompt adjust-
ment may not provide the same benefit as in datasets
with subtle inter-class differences. Static prompts
and visual tokens may suffice for high performance
here. Additionally, Caltech101’s varied objects and
backgrounds can introduce noise, potentially causing
adaptive prompt tuning to focus on irrelevant features
and affecting performance.
Overall, our cross-attention model performs ro-
bustly across varying degrees of class variances,
showing adaptability and improved accuracy with in-
creased shots across all datasets. However, its per-
formance on the Caltech101 dataset, which features
a wider variety of objects and backgrounds, high-
lights a critical aspect of this approach. The adap-
tive prompt tuning can be influenced by background
noise, leading to less optimal tuning in general clas-
sification settings. This highlights the importance
of understanding and leveraging both intra-class and
inter-class variances, as well as the dataset’s con-
textual complexity, to optimize model performance.
These results suggest that while adaptive prompt tun-
ing offers significant advantages in fine-grained clas-
sification tasks, its benefits must be carefully weighed
against potential limitations in more general or clut-
tered environments.
Generalization Setup. Table 2 summarizes the per-
formance of different models on the base and new
classes across the FGVC Aircraft, Oxford Flowers,
and CUBirds datasets. The metrics reported include
the accuracy on the base classes (Base), the accuracy
on the new classes (New), and the harmonic mean
(F1-Mean).
For the FGVC Aircraft dataset, the cross atten-
tion model demonstrated a notable improvement over
other models. Specifically, it achieved an F1-Mean
score of 36.46, outperforming both CoOp and Co-
CoOp models, which scored 28.75 and 27.74, respec-
tively. This improvement highlights the model’s abil-
ity to generalize well to new classes, which is crit-
ical given the high intra-class variance within this
dataset. The cross attention model’s dynamic adap-
tation through feedback from image features likely
contributed to its superior performance, allowing it to
capture subtle distinctions between different aircraft
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
120
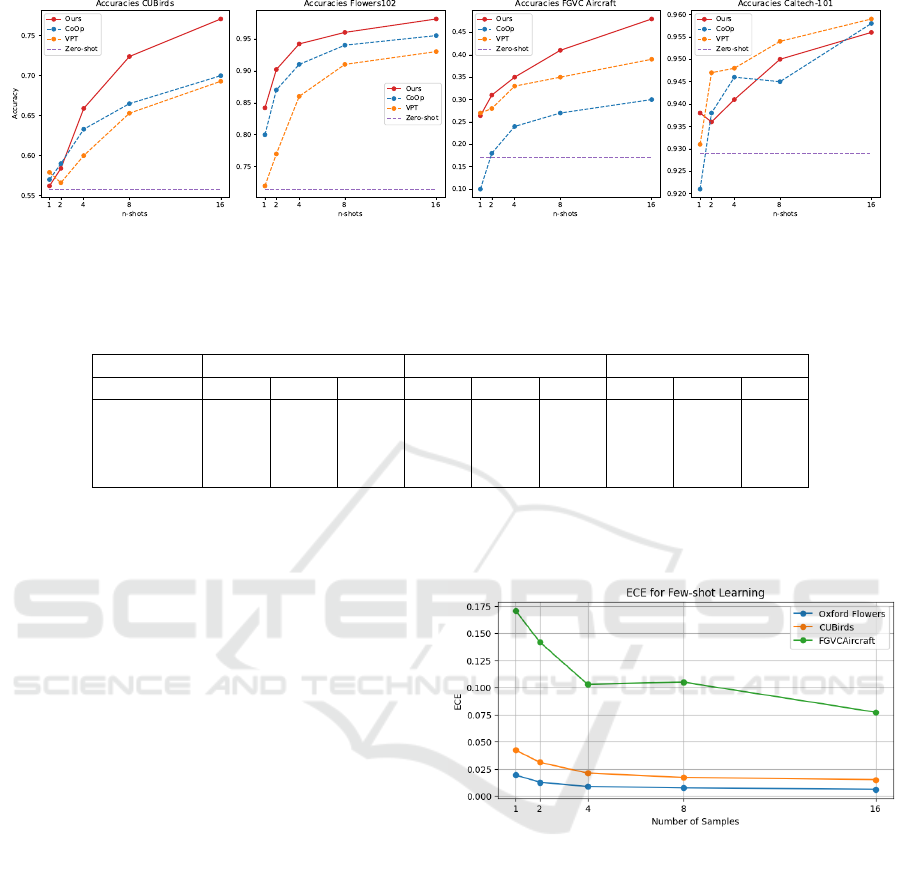
Figure 3: Results of the few-shot learning set up. Our approach (red) is compared to the baseline CLIP results (purple), CoOp
(blue), and VPT (yellow). Results are from the average scores of 3 models, where the training images are sampled with
different sampling seeds.
Table 2: Results (accuracy) of the base to new class setup. The results are produced from the average of 3 sampling seeds of
the training set, where 16 samples were taken per class.
FGVC Aircraft Oxford Flowers CUBirds
Model Base New F1 Base New F1 Base New F1
CLIP 27.19 36.29 31.09 72.08 77.80 74.83 65.18 52.34 58.06
CoOp 40.44 22.30 28.75 97.60 59.67 74.06 81.51 34.63 48.60
CoCoOp 33.41 23.71 27.74 94.87 71.75 81.71 71.97 08.04 14.40
APT (ours) 43.74 31.26 36.46 98.64 71.98 83.23 83.02 43.42 57.02
types effectively.
In the Oxford Flowers dataset, characterized by
distinct and less variable class features, the cross at-
tention model again led the performance metrics. It
achieved an F1-Mean score of 83.23, significantly
higher than CoOp’s 74.06 and CoCoOp’s 81.71. The
ability to generalize to new classes while maintain-
ing high accuracy underscores the model’s robust-
ness. The results suggest that incorporating image
features into the prompt, as done in CoCoOp, pro-
vides an advantage, but the cross attention mechanism
further enhances this by dynamically adjusting to new
visual inputs, leading to superior generalization.
For the CUBirds dataset, the cross attention model
showed strong generalization capabilities with an F1-
Mean score of 57.02. This was competitive with
the baseline CLIP model, which had an F1-Mean of
58.06, but it outperformed both CoOp (48.60) and Co-
CoOp (14.40) models. Notably, the cross attention
model excelled in the base class performance, achiev-
ing the highest accuracy among all models. However,
the generalization to new classes was less pronounced
compared to FGVC Aircraft and Oxford Flowers.
This indicates that while the model adapts well within
known classes, the complexity and similarity of bird
species present a more significant challenge for un-
seen classes.
4.2 Uncertainty Quantification
Expected Calibration Error. The ECE for few-
shot learning across different datasets as function of
the number of samples provides an insight into the
model’s reliability of its confidence estimates with
limited training data (Figure 4).
Figure 4: Expected Calibration Error (ECE) across number
of training samples. A lower ECE indicates a better cali-
bration. It can be observed that as the number of samples is
increased, the ECE decreases.
For the Oxford Flowers and the CUBirds datasets,
the ECE shows a consistent decrease as the number
of samples increases, stabilizing at values around 0.01
and 0.02. This trend suggests that the model remains
well-calibrated as more samples are provided. The
more gradual improvement in ECE for the FGVC Air-
craft dataset indicates that it poses a more substan-
tial challenge for calibration; nonetheless the model
demonstrates improvement with additional samples,
showing its potential for better calibration with more
extensive training.
Figure 5 provides a more in depth visualization of
the calibrations, which reveal how well the model’s
Adaptive Prompt Tuning: Vision Guided Prompt Tuning with Cross-Attention for Fine-Grained Few-Shot Learning
121
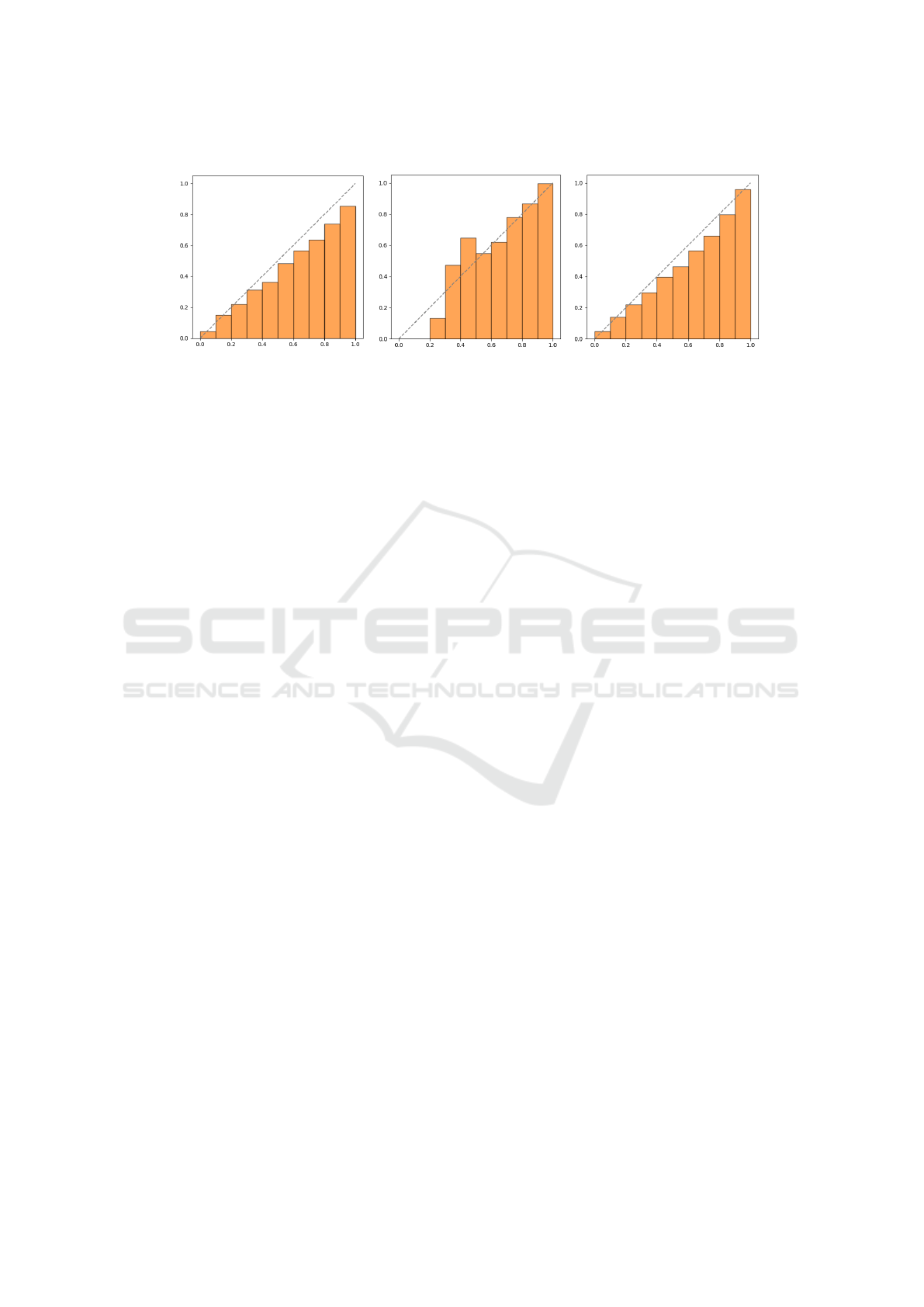
CUBirds Flowers102 FVGC Aircraft
Average per-bin accuracy
Confidence
Figure 5: Calibration plots for different datasets showing the model’s performance in predicting correct class probabilities.
Each plot illustrates the relationship between the predicted probability and the actual accuracy, helping to assess the reliability
of the model’s probabilistic predictions.
confidence aligns with its actual accuracy. These plots
illustrate the accuracy versus confidence for the CU-
Birds, Oxford Flowers, and FGVC Aircraft datasets.
Each dataset has been trained with a dropout rate of
0.2 and with 16 samples per class. Each plot com-
pares the model accuracy to a perfectly calibrated
model (black dashed line), providing insights into
how well the model predictions match actual out-
comes.
From these charts, we can see how the model is
slightly overconfident on CUBirds and FVGC Air-
craft, while we get a mixed profile for Oxford Flow-
ers. For CUBirds, there is a noticeable drop in accu-
racy for the high-confidence bins (0.9 to 1.0), with an
average accuracy of about 15 point percentages lower
than confidence. On the flowers dataset, the model
seems to be perfectly calibrated on the 0.7–1.0 bins,
while it showcases under– and overconfidence in the
earlier bins. This behavior is possibly due to the high
accuracy of the model, which leaves few data points
in the lower half of the confidence (and accuracy)
spectrum. The FVGC Aircraft has a lower overall
accuracy, which cause the ECE to give more impor-
tance in the middle of the confidence spectrum, where
most data points are located. The chart shows how the
model seems particularly overconfident in the 0.5–0.7
confidence range.
Confidence vs Uncertainty. The confidence vs un-
certainty plots for the Oxford Flowers, FGVC Air-
craft, and CUBirds datasets (Figure 6) illustrate the
relationship between the model’s confidence in its
predictions and the associated uncertainty. These
plots help us understand how well the model can dif-
ferentiate between certain and uncertain predictions,
and how this differentiation impacts the accuracy of
the predictions. The plots show the confidence and
uncertainty of models trained with 16 samples per
class.
Predictions with high confidence generally ex-
hibit low uncertainty, while low-confidence predic-
tions tend to have higher uncertainty, aligning with
the model’s ECE score and indicating accurate self-
assessment. The inverse relationship between confi-
dence and uncertainty is consistent across all datasets,
with high-confidence predictions often correct and
low-confidence ones more uncertain. The KDE den-
sity plots support this, showing that correct predic-
tions cluster in high-confidence, low-uncertainty re-
gions, while incorrect predictions are more dispersed
with higher uncertainty. Notably, the FGVC Air-
craft and CUBirds datasets show similar uncertainty
spreads, despite CUBirds’ higher accuracy, possibly
due to its larger number of classes, which increases
entropy and uncertainty.
The “cone shape” observed in the uncertainty vs.
confidence plots reflects the model’s ability to dis-
tinguish between easy and difficult examples. For
easy cases, high confidence and low uncertainty align
well with correct predictions, while more challeng-
ing examples maintain low uncertainty despite lower
confidence, indicating the model’s awareness of diffi-
culty. As uncertainty increases, confidence narrows
uniformly, reflecting the model’s caution in uncer-
tain situations. In OOD settings, such as with the
Caltech101 dataset, uncertainty remains consistently
high, and predictions cluster around low confidence
and high uncertainty, indicating the model’s struggle
to differentiate between correct and incorrect predic-
tions in unfamiliar data, as expected for an OOD sce-
nario.
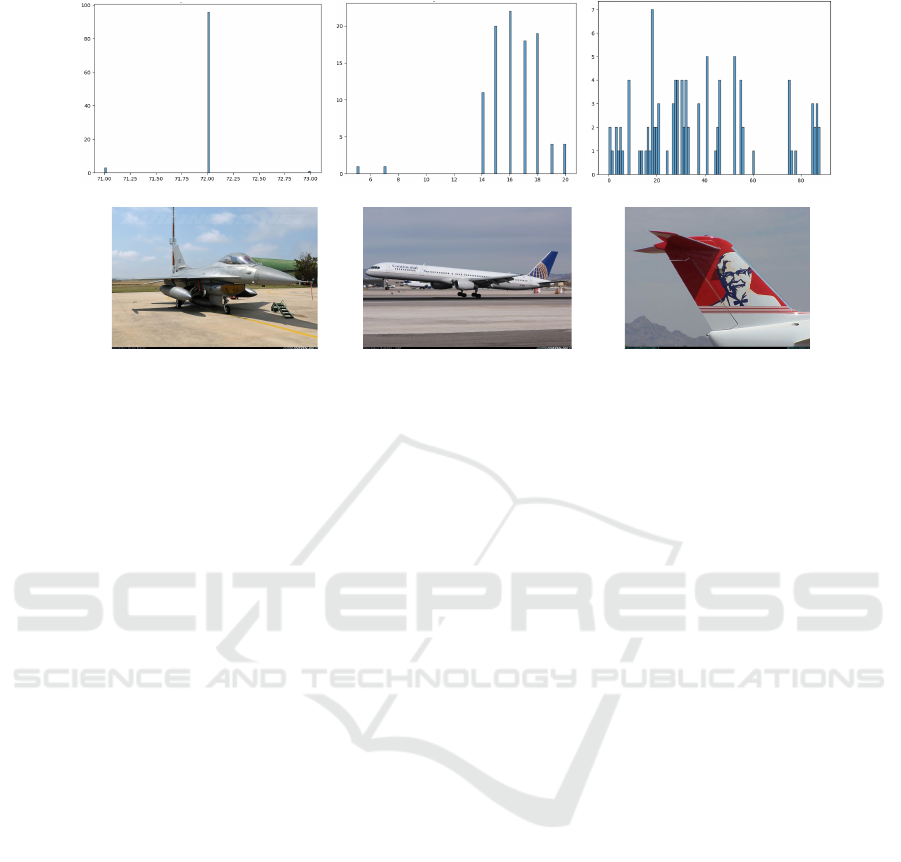
Qualitative Analysis. Figure 7 presents a qual-
itative analysis of the model’s behavior on in-
distribution (ID) and out-of-distribution (OOD) im-
ages using 100 Monte Carlo Dropout samples per im-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
122
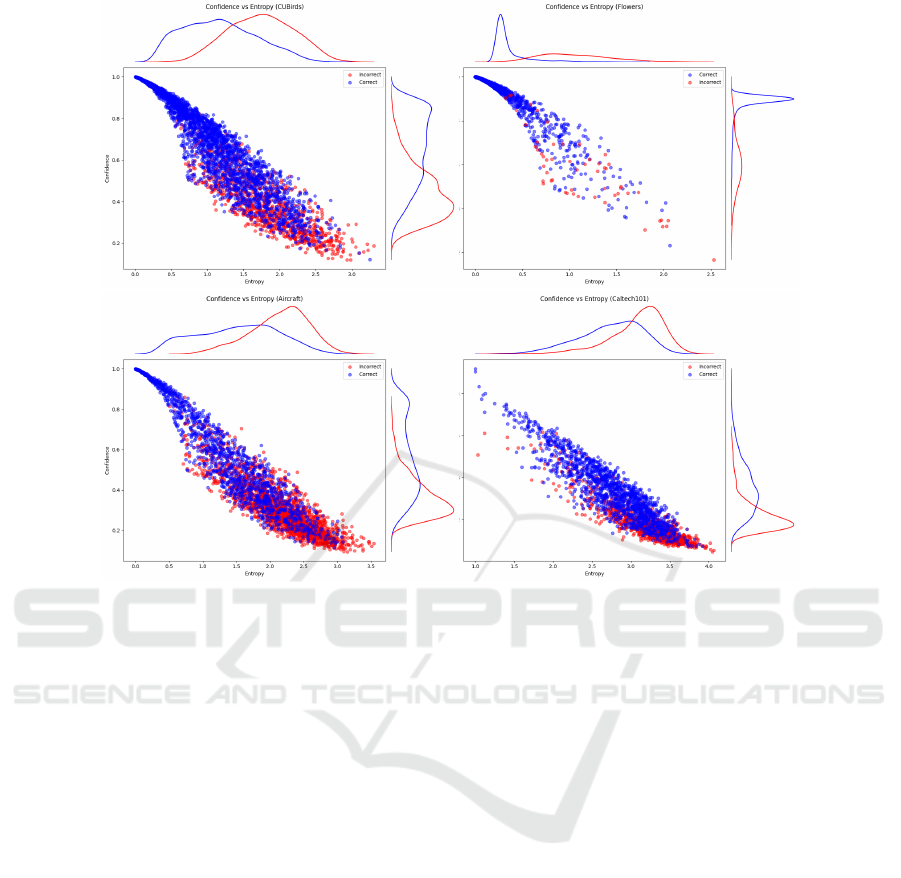
Figure 6: Confidence vs. Uncertainty plots for the Oxford Flowers, FGVC Aircraft, and CUBirds datasets show an inverse
relationship between prediction confidence and uncertainty. Correct predictions (blue) cluster at higher confidence and lower
uncertainty, while incorrect predictions (red) are more dispersed. The KDE (Kernel Density Estimation) plots provide a visual
representation of the density of predictions along the confidence and uncertainty axes, highlighting areas where predictions
are most concentrated. This additional layer of information helps to identify the distribution of both correct and incorrect
predictions across the confidence and uncertainty spectrum.
age. The model’s logits are converted to probabilities,
and the most likely class is recorded, with histograms
illustrating the predicted class distributions. The left
histogram shows a tight concentration of predictions
for an ID image, indicating high confidence and accu-
racy in classifying the image. The clear peak reflects
the model’s strong certainty in this case. The central
histogram shows a broader distribution for another ID
image, suggesting the model struggles to differentiate
between similar sub-classes (e.g., 727-200 vs. 727-
300), though it still maintains reasonable confidence.
The third histogram shows a dispersed distribution for
an OOD image, reflecting significant uncertainty and
a lack of confidence. The model appears to be guess-
ing due to incomplete data, as shown by the wide
spread of predictions across many classes.
5 DISCUSSION
The present paper introduced a novel cross-attention-
based prompt tuning approach, which we call Adap-
tive Prompt Tuning (APT), aimed at enhancing few-
shot learning for fine-grained classification. We
evaluated this model, alongside other state-of-the-art
prompt tuning approaches, CoOp and VPT, across
four datasets: FGVC Aircraft, Oxford Flowers, CU-
Birds, and Caltech101. The cross-attention mecha-
nism demonstrated significant performance improve-
ments, particularly in datasets with high intra-class
variance. For instance, the model achieved substan-
tial gains in the FGVC Aircraft dataset, improving
accuracy from 27% to 47% as the number of shots
increased. However, while these results highlight the
approach’s efficacy, there remains room for improve-
ment, especially in achieving higher accuracy with
fewer training examples and addressing challenges in
datasets with complex visual variations.
The performance in the Oxford Flowers dataset
further highlights the model’s capability, where it
reached 97% accuracy with just 16 shots, though the
marginal gains over CoOp in simpler classification
tasks suggest that the benefits of cross-attention may
be less pronounced in cases with clear and distinct
Adaptive Prompt Tuning: Vision Guided Prompt Tuning with Cross-Attention for Fine-Grained Few-Shot Learning
123
Maximum Prediction Probability
Frequency
in distribution in distribution
OOD
Figure 7: The histograms on the left illustrate the predictions made over 100 samples with MC-dropout. The column on the
right shows the corresponding image. It can be observed that on the first image the model is very certain, whilst on the OOD
one (right) it shows almost random guessing.
class features. On the CUBirds dataset, the model
showed strong results, achieving 77% accuracy at 16
shots, but the initial performance equaling the zero-
shot baseline indicates a need for strategies that can
improve early-stage learning. These findings high-
light the cross-attention model’s strengths in handling
fine-grained distinctions while pointing to opportuni-
ties for enhancing performance in fewer-shot scenar-
ios.
Uncertainty Quantification (UQ) through Ex-
pected Calibration Error (ECE) provided additional
insights into the reliability of the uncertainty esti-
mates produced by APT. While the model demon-
strated good calibration in the FGVC Aircraft dataset,
the higher ECE in comparison to other datasets un-
derscores the impact of accuracy on calibration met-
rics. The analysis also revealed calibration issues in
the CUBirds and Oxford Flowers datasets, where the
model was under-confident in lower-confidence pre-
dictions and, conversely, overconfident in higher con-
fidence. These discrepancies suggest the need for re-
fined calibration techniques.
Future work should focus on improving the model
initial learning efficiency and enhancing its cali-
bration. Integrating more advanced data augmen-
tation methods and exploring different configura-
tions of the cross-attention mechanism could fur-
ther improve the model’s performance across varying
datasets. Additionally, developing more sophisticated
UQ techniques, such as Deep Ensembles or Bayes-
by-backprop, might enhance the reliability of uncer-
tainty estimates.
ACKNOWLEDGEMENTS
This material is based on research sponsored by EDF:
project 101103386 part of EDF-2021-DIGIT-R-2.
REFERENCES
Alom, M. Z., Taha, T. M., Yakopcic, C., Westberg, S.,
Sidike, P., Nasrin, M. S., Hasan, M., Van Essen, B. C.,
Awwal, A. A., and Asari, V. K. (2019). A state-of-the-
art survey on deep learning theory and architectures.
electronics, 8(3):292.
Blundell, C., Cornebise, J., Kavukcuoglu, K., and Wierstra,
D. (2015). Weight uncertainty in neural network. In
International conference on machine learning, pages
1613–1622. PMLR.
Chen, T., Kornblith, S., Norouzi, M., and Hinton, G. (2020).
A simple framework for contrastive learning of visual
representations. In International conference on ma-
chine learning, pages 1597–1607. PMLR.
Chen, Y., Liu, Z., Xu, H., Darrell, T., and Wang, X. (2021).
Meta-baseline: Exploring simple meta-learning for
few-shot learning. In Proceedings of the IEEE/CVF
international conference on computer vision, pages
9062–9071.
Dehghan, A., Masood, S. Z., Shu, G., Ortiz, E., et al.
(2017). View independent vehicle make, model and
color recognition using convolutional neural network.
arXiv preprint arXiv:1702.01721.
Ding, K., Wang, J., Li, J., Shu, K., Liu, C., and Liu, H.
(2020). Graph prototypical networks for few-shot
learning on attributed networks. In Proceedings of the
29th ACM International Conference on Information &
Knowledge Management, pages 295–304.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
124

Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Gal, Y. and Ghahramani, Z. (2016). Dropout as a bayesian
approximation: Representing model uncertainty in
deep learning. In international conference on machine
learning, pages 1050–1059. PMLR.
Ganaie, M. A., Hu, M., Malik, A. K., Tanveer, M., and Sug-
anthan, P. N. (2022). Ensemble deep learning: A re-
view. Engineering Applications of Artificial Intelli-
gence, 115:105151.
Goan, E. and Fookes, C. (2020). Bayesian neural net-
works: An introduction and survey. Case Studies in
Applied Bayesian Data Science: CIRM Jean-Morlet
Chair, Fall 2018, pages 45–87.
H
´
enaff, O., Srinivas, A., Fauw, J., Razavi, A., Doersch,
C., Eslami, S., and van den Oord, A. (2020). Data-
efficient image recognition with contrastive predictive
coding. arxiv. arXiv preprint arXiv:1905.09272.
Jena, B., Nayak, G. K., and Saxena, S. (2022). High-
performance computing and its requirements in deep
learning. In High-Performance Medical Image Pro-
cessing, pages 255–288. Apple Academic Press.
Jia, M., Tang, L., Chen, B.-C., Cardie, C., Belongie, S.,
Hariharan, B., and Lim, S.-N. (2022). Visual prompt
tuning. In European Conference on Computer Vision,
pages 709–727. Springer.
Kim, S. and Yun, S.-Y. (2022). Calibration of few-shot clas-
sification tasks: Mitigating misconfidence from distri-
bution mismatch. IEEE Access, 10:53894–53908.
Lemley, J., Bazrafkan, S., and Corcoran, P. (2017). Deep
learning for consumer devices and services: pushing
the limits for machine learning, artificial intelligence,
and computer vision. IEEE Consumer Electronics
Magazine, 6(2):48–56.
Maji, S., Kannala, J., Rahtu, E., Blaschko, M., and Vedaldi,
A. (2013). Fine-grained visual classification of air-
craft. Technical report.
Miao, Y., Lei, Y., Zhou, F., and Deng, Z. (2024). Bayesian
exploration of pre-trained models for low-shot image
classification. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 23849–23859.
Nakkiran, P., Kaplun, G., Bansal, Y., Yang, T., Barak,
B., and Sutskever, I. (2021). Deep double descent:
Where bigger models and more data hurt. Jour-
nal of Statistical Mechanics: Theory and Experiment,
2021(12):124003.
Nguyen, A., Yosinski, J., and Clune, J. (2015). Deep neural
networks are easily fooled: High confidence predic-
tions for unrecognizable images. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Nilsback, M.-E. and Zisserman, A. (2008). Automated
flower classification over a large number of classes.
In 2008 Sixth Indian conference on computer vision,
graphics & image processing, pages 722–729. IEEE.
Peng, Y., He, X., and Zhao, J. (2017). Object-part atten-
tion model for fine-grained image classification. IEEE
Transactions on Image Processing, 27(3):1487–1500.
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., et al. (2021). Learning transferable visual models
from natural language supervision. In International
conference on machine learning, pages 8748–8763.
PMLR.
Seoh, R. (2020). Qualitative analysis of monte carlo
dropout. arXiv preprint arXiv:2007.01720.
Snell, J., Swersky, K., and Zemel, R. (2017). Prototypical
networks for few-shot learning. Advances in neural
information processing systems, 30.
Valdenegro-Toro, M. (2021). I find your lack of uncertainty
in computer vision disturbing. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 1263–1272.
Valdenegro-Toro, M. and Mori, D. S. (2022). A deeper look
into aleatoric and epistemic uncertainty disentangle-
ment. In 2022 IEEE/CVF Conference on Computer
Vision and Pattern Recognition Workshops (CVPRW),
pages 1508–1516. IEEE.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Wah, C., Branson, S., Welinder, P., Perona, P., and Be-
longie, S. (2011). Technical Report CNS-TR-2011-
001, California Institute of Technology.
Wang, Y., Yao, Q., Kwok, J. T., and Ni, L. M. (2020). Gen-
eralizing from a few examples: A survey on few-shot
learning. ACM computing surveys (csur), 53(3):1–34.
Zhou, K., Yang, J., Loy, C. C., and Liu, Z. (2022a). Con-
ditional prompt learning for vision-language models.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 16816–
16825.
Zhou, K., Yang, J., Loy, C. C., and Liu, Z. (2022b). Learn-
ing to prompt for vision-language models. Inter-
national Journal of Computer Vision, 130(9):2337–
2348.
Adaptive Prompt Tuning: Vision Guided Prompt Tuning with Cross-Attention for Fine-Grained Few-Shot Learning
125
