
Anomalous Water Dataset Captured by Hyperspectral Cameras
Youta Noboru
a
and Yuko Ozasa
b
Tokyo Denki University, 5 Senju Asahi-cho, Adachi-ku, Tokyo, Japan
Keywords:
Hyperspectral Image, Dataset, Water, Anomaly Detection.
Abstract:
This paper proposes a hyperspectral dataset designed for detecting anomalies in water caused by the mixing of
colorless and transparent anomalous liquids. Detecting such anomalous substances, particularly when they are
transparent, is crucial for public health and environmental safety, as conventional methods often inadequate.
Hyperspectral imaging captures subtle spectral differences, enabling the identification of materials that are
visually indistinguishable. The dataset aims to support the development of unsupervised learning models that
can detect anomalous substances in water using only a spectral data. We have made this dataset publicly
available (https://github.com/033labcodes/visapp25\ Anomalous-Water-Dataset) to facilitate further research
in this area.
1 INTRODUCTION
It is unacceptable to mix toxins into the drinking wa-
ter or food of animals, but many animals lose their
lives due to this abuse. If the anomalous water ap-
pears the same as usual, colorless and transparent, the
animals may drink it without hesitation. To protect
these animals from such cruelty, it is essential to de-
velop a method that can determine the safety of their
drinking water.
Our task is to detect the colorless and transparent
substances that are indistinguishable in water using
cameras. If the anomalous substances are not col-
orless and transparent, they could be visually iden-
tifiable. Therefore, we aim to tackle a case when
the anomalous substances are colorless and transpar-
ent. There are surveillance cameras in areas where
animals are kept, so being able to detect anomalies
through image analysis could help protect the ani-
mals.
We apply Hyperspectral (HS) cameras to our task
since the cameras are effective in detecting differ-
ences that are imperceptible to the human eye. (Su
et al., 2021). Related work on HS imagery analy-
sis, especially on anomaly detection, has primarily
focused on water-related phenomena. These stud-
ies typically target issues such as algal blooms or oil
spills in rivers and lakes, often utilizing drone or satel-
lite imagery (Du et al., 2021). These applications dif-
a
https://orcid.org/0009-0003-0123-9822
b
https://orcid.org/0000-0001-9450-0708
fer significantly from our work in both purpose and
setting. Most work based on HS image analyzes and
classifies data based on the spectral information of in-
dividual pixels (Su et al., 2021). Therefore, we also
employ pixel-wise HS data to our task, the detection
of anomalous substances dissolved in water that are
colorless and transparent.
Our task should be achieved through unsupervised
learning. The types of anomalous substances present
in the water and their proportions are unknown. So,
it is challenging to gather training data for anomalous
conditions in advance. Since no work has addressed
the same task setting as ours, we first validate the ef-
fectiveness of using HS data for our task by employ-
ing commonly used unsupervised anomaly detection
methods for HS data.
In this paper, we propose a dataset to evaluate the
effectiveness of HS data for our task. Our dataset con-
sists of images captured by a HS camera, containing
both normal water and water mixed with anomalous
substances which are colorless and transparent. We
analyze the characteristics of HS data in our task us-
ing the dataset and further evaluate it through unsu-
pervised anomaly detection.
We analyze the characteristics of the proposed
dataset by comparing the spectral signatures of nor-
mal water with those contaminated by various sub-
stances. Our analysis reveals subtle spectral differ-
ences, particularly in non-visible regions, that are un-
detectable to the human eyes or standard RGB cam-
eras. Based on these results, HS data which includes
442
Noboru, Y. and Ozasa, Y.
Anomalous Water Dataset Captured by Hyperspectral Cameras.
DOI: 10.5220/0013163800003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
442-449
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
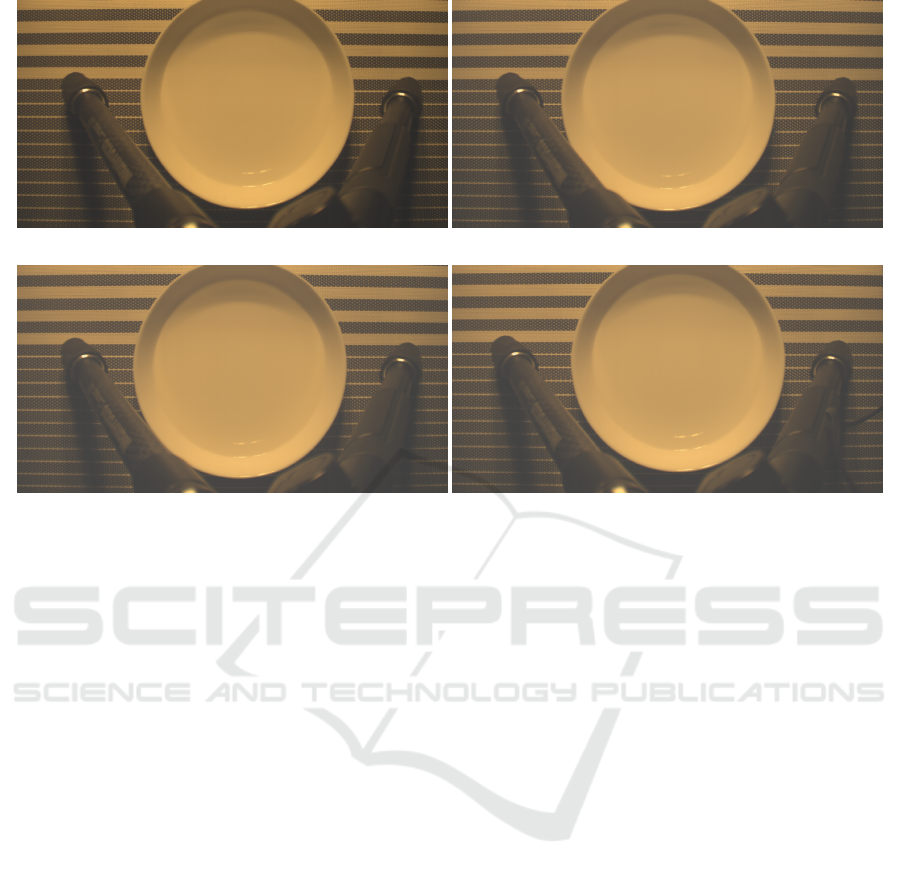
(a) Normal water. (b) Water mixed with detergent.
(c) Water mixed with herbicide. (d) Water mixed with chlorine bleach.
Figure 1: RGB samples of normal water and water mixed with anomalous substances.
not only visible but also non-visible spectral informa-
tion, has the potential to be effective for our task.
We compare the performance of various unsuper-
vised anomaly detection methods using both RGB
and HS imaging in our experimental evaluation.
Our results demonstrate the clear superiority of HS
imaging over conventional RGB imaging, with the
best-performing methods achieving an AUCROC of
0.78 for HS data compared to only 0.62 for RGB
data. Additionally, we investigate the robustness of
these methods to unknown anomalies. While per-
formance decreased in this scenario, several methods
still demonstrated promising detection capabilities.
2 RELATED WORK
HS imaging is known to be effective when the dif-
ferences of the targets are difficult to distinguish with
the human eye, as it captures not only the visible spec-
trum but also the non-visible spectrum with high spec-
tral resolution. For example, it is particularly useful
when the target is far away and only a few pixels can
be captured, or when the human eye cannot differen-
tiate based on color.
Although not directly related to our task, there
is work on HS imaging related to water, such as
work focused on water quality monitoring (Brando
and Dekker, 2003). HS datasets specifically designed
for water quality are less common but are gaining at-
tention, with some datasets specifically tailored for
anomaly detection (Cao et al., 2021; VanderWoude
and Marshall, 2021). These datasets focus on detect-
ing subtle spectral changes that may indicate the pres-
ence of pollutants, algae blooms, or chemical contam-
ination in water bodies.
Work on unsupervised anomaly detection using
HS data often focuses on detecting changes in land
cover or buildings. However, there are no task set-
tings similar to the one presented in this paper. For a
first step in our work, we construct a HS dataset for
our task and evaluate the dataset using unsupervised
anomaly detection methods that are commonly used
for comparative evaluation in HS data (Zhao et al.,
2019).
3 DATASET
We construct a HS image dataset comprising three
types of anomalous substances. These anomalous
substances are mixed with water, poured into a dish,
and then captured by HS camera. Figure 1 illustrates
the RGB samples derived from the HS images. The
three types of anomalous substances included in the
dataset are herbicide, detergent, and chlorine bleach,
all anomalous substances not meant for consumption.
As evident from the figure, there are no discernible
Anomalous Water Dataset Captured by Hyperspectral Cameras
443
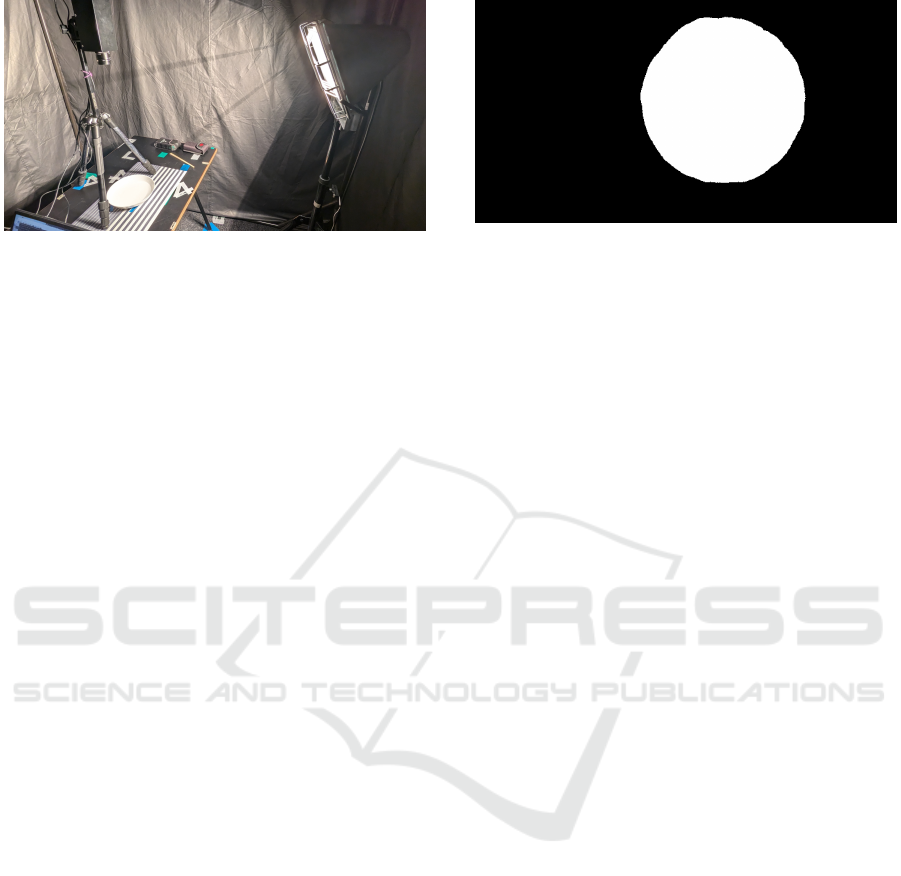
Figure 2: Scene of dataset capture: HS camera positioned
above dishes containing water samples.
differences visible to the eye.
We capture a total of 80 HS images. For each nor-
mal and anomalous substance, images are taken from
10 different positions. At each position, images are
taken with exposure settings adjusted to both the vis-
ible spectrum and the near-infrared (NIR) spectrum.
We utilize the NH-9 HS Camera by evaJapan (Eba
Japan Co.Ltd., ), which is capable of capturing a
spectral range from 350[nm] to 1100[nm] across 151
bands, with a spatial resolution of 5[nm]. The cam-
era records data in raw format, providing pixel val-
ues ranging from 0 to 4095, allowing for a detailed
spectral analysis. The images have a resolution of
2048 × 1080 pixels.
Figure 2 depicts the setup for capturing the
dataset. The dataset was recorded in a darkroom with
halogen lighting. The camera was positioned directly
above the dish. The distance between the camera and
the dish was 55[cm]. To ensure diversity and pre-
vent the creation of identical samples under the same
imaging conditions, the dish is randomly repositioned
by approximately 5[cm] between each pair of visible
and NIR HS images.
To facilitate the evaluation of methods focusing on
HS image pixels, we annotated the dataset. Each HS
image in the dataset is labeled with binary indicators
denoting whether the sample is normal or anomalous
and specifying the name of the anomalous substance.
Additionally, as shown in Figure 3, mask images were
created to delineate pixel regions extracted from the
HS images.
4 DATA ANALYSIS
4.1 Preprocessing Techniques
To analyze the HS data, we first extract HS data
containing spectral information from the HS images,
where HS data is denoted as a pixel value extracted
from HS image. First, we apply black level correction
Figure 3: Example of mask images used for pixel extraction
from HS images.
to remove both the DC offset from the analog circuits
and the dark current noise inherent to the pixel com-
ponents. To further reduce noise, we apply a 9 × 9
smoothing filter. Then, the HS data are extracted from
the HS images using mask images, with each HS im-
age yielding approximately 490, 000 pixels.
We pre-process the HS data for the analysis
through visualization. For the visualization of the
spectra of HS data, the data is scaled to a range of
0 to 1 by dividing by 4095 since the range of the HS
data is 0 to 4095.
4.2 Spectral Analysis in the Visible and
Near-Infrared Regions
Figures 4 present the mean and standard deviation of
the HS images extracted from normal samples in the
dataset. The normal sample is denoted as the HS data
of the normal water. Figure 4a shows the spectral data
with exposure time optimized for the visible light re-
gion, while Figure 4b displays the data with exposure
time adjusted for the NIR region. Hereafter, we will
refer to these as “visible light data” and “NIR data”
respectively.
The spectral figures provide insights into our
dataset’s characteristics. Figure 4a shows that the
550[nm] − 750[nm] range is captured with high in-
tensity due to optimized exposure. However, inten-
sity decreases toward the non-visible regions, with
increased data variance below 400[nm] and above
1000[nm], likely due to a lower signal-to-noise ratio
after black level correction.
The NIR data in Figure 4b highlights the effective-
ness of adjusting exposure time for the NIR region.
In contrast to Figure 4a, it shows extended and high-
sensitivity capture in the longer wavelengths. Signals
in the 600[nm] − 750[nm] range are saturated due to
increased exposure, while the data reveals a broad and
well-captured spectral range in the NIR.
We constructed combined Visible+NIR data
through band selection from both datasets. The
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
444
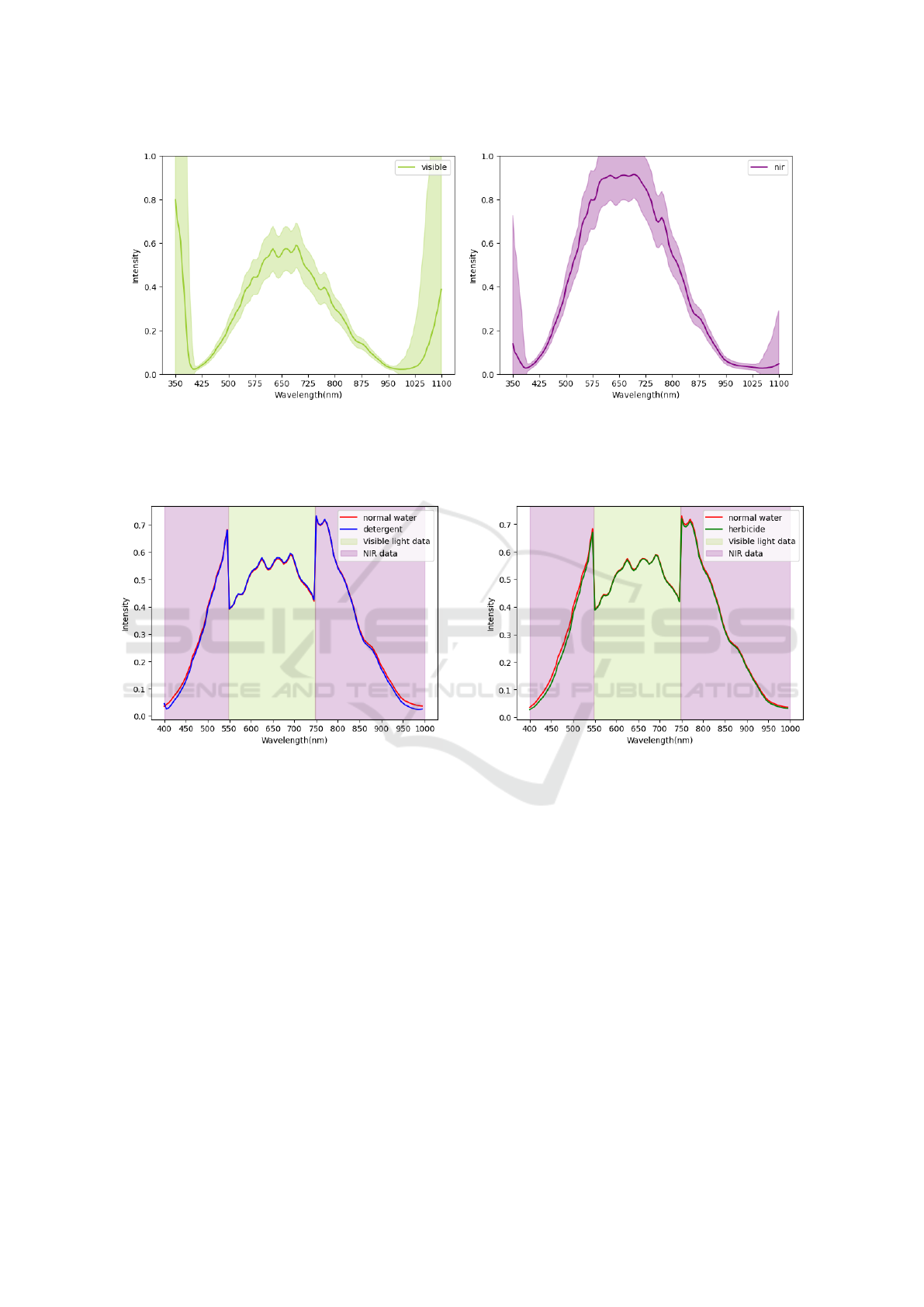
(a) Visible light data. (b) NIR data.
Figure 4: Spectral characteristics of normal water samples. (a) Data optimized for exposure time in the visible light spectrum.
(b) Data optimized for exposure time in the Near-Infrared (NIR) region. In both graphs, the dark line represents the mean
spectral values, while the lighter shaded area indicates the standard deviation.
Figure 5: Comparison of average Visible+NIR spectra be-
tween normal water and water contaminated with detergent.
visible range includes 550[nm] − 750[nm], and the
NIR ranges are 400[nm] − 550[nm] and 750[nm] −
1000[nm]. This approach maximizes sensitivity from
both datasets, with a 5[nm] recording interval, result-
ing in 120 bands spanning 400[nm] − 1000[nm].
4.3 Comparison of Spectral Signatures
Between Normal and Anomalous
Samples
Figures 5 to 7 compare the average Visible+NIR spec-
tra of normal water and three anomalous samples: de-
tergent, herbicide, and chlorine bleach. These plots
span the 400 − 1000[nm] range, constructed through
selective band selection as detailed in Section 4.2.
In Figure 5, the spectrum of detergent-
contaminated water closely resembles normal
Figure 6: Comparison of average Visible+NIR spectra be-
tween normal water and water contaminated with herbicide.
water across most wavelengths. However, subtle
deviations around 400[nm] and 900[nm] are more
noticeable in the NIR region, captured with optimized
exposure settings.
Figure 6 compares the spectra of normal water and
water mixed with herbicide. While largely similar,
subtle differences appear near 400[nm] and 520[nm].
These distinctions are more evident in the NIR region
than in the visible range.
Figure 7 compares chlorine bleach, revealing
more pronounced spectral differences than other sam-
ples. Unlike detergent and herbicide, chlorine bleach
shows significant distinctions in the visible range,
highlighting its unique spectral signature.
These analyses demonstrate the value of HS imag-
ing in detecting subtle spectral differences beyond hu-
man visible perception, allowing for effective distinc-
tion between normal and contaminated water.
Anomalous Water Dataset Captured by Hyperspectral Cameras
445
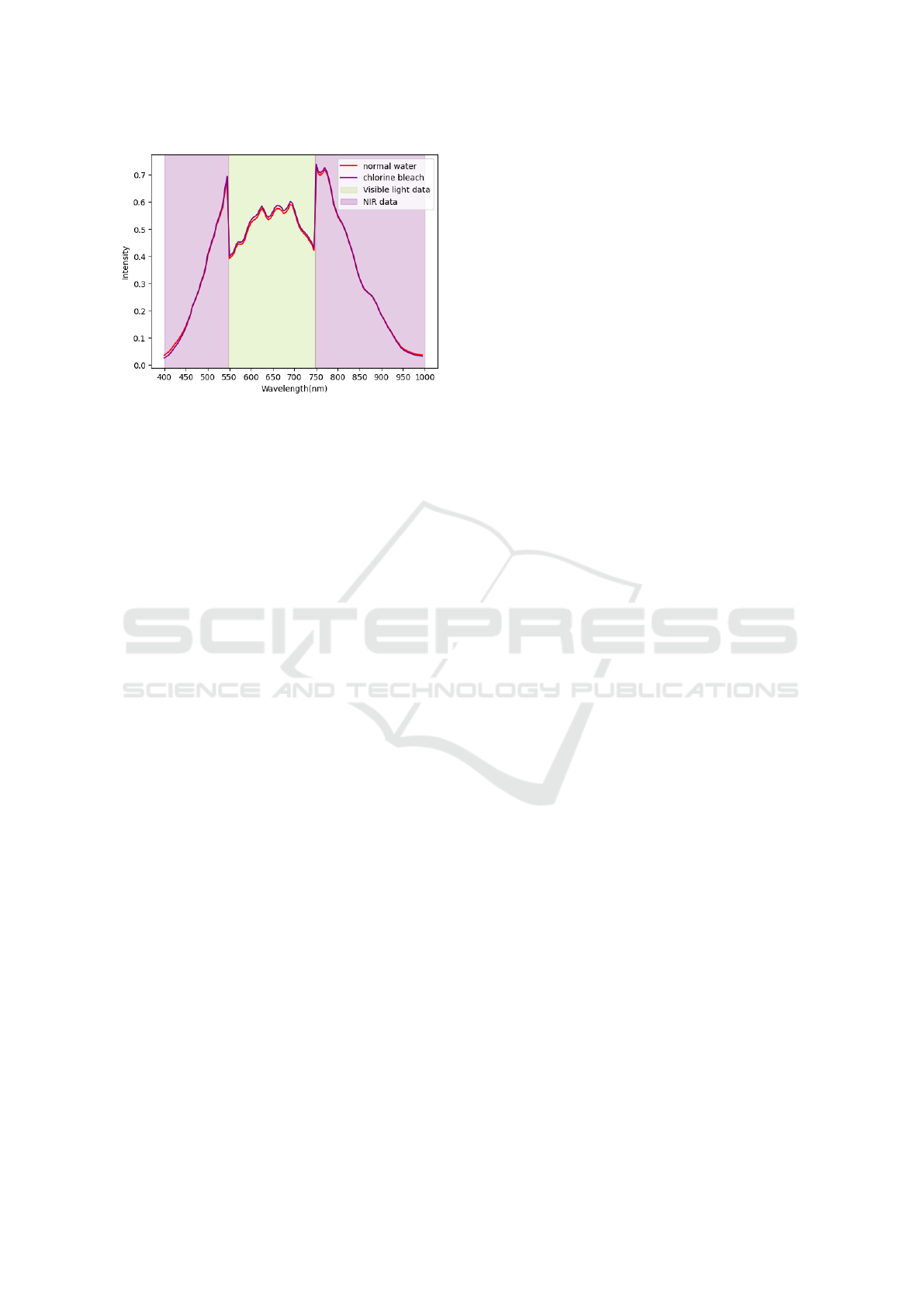
Figure 7: Comparison of average Visible+NIR spectra be-
tween normal water and water contaminated with chlorine
bleach.
5 EVALUATION OF ANOMALY
DETECTION
5.1 Experimental Setup
5.1.1 Dataset and Sampling Methodology
For our experiments, we utilized distinct HS images
for training and evaluation purposes. The HS images,
capturing both normal water and water mixed with
three different types of anomalous substances, were
initially divided into training and evaluation sets at a
7:3 ratio for each substance type. Then, we performed
spectral extraction on these sets using mask images,
followed by conducted band selection. We standard-
ized the extracted HS data by calculating the mean
and standard deviation for each image individually.
Our protocol randomly selected 7, 000 HS data
points from training samples and 3, 000 from evalu-
ation samples, ensuring 10% anomalies evenly dis-
tributed across three types. Each experiment was re-
peated 10 times, and we report the mean results.
5.1.2 Hardware and Software Specifications
The experiments were conducted on a high-
performance workstation equipped with an Intel i9-
13900k processor operating at 5.8GHz, 128GB of
RAM, and 24 cores. For the implementation of
anomaly detection methods, we employed the Pyod
library (Zhao et al., 2019). The computation of eval-
uation metrics was facilitated by the scikit-learn li-
brary (Pedregosa et al., 2011).
5.1.3 Evaluation Metrics
To assess the efficacy of our experiments on anomaly
detection, we employed two primary metrics: AU-
CROC (Area Under the Receiver Operating Charac-
teristic Curve) and Precision.
The AUCROC metric measures the area under
the ROC curve, representing the relationship between
True Positive Rate (TPR) and False Positive Rate
(FPR) across thresholds. Ranging from 0.5 to 1,
higher values indicate better performance. It is robust
against class imbalance, ensuring reliable evaluations
even with few anomalous samples.
Precision measures the proportion of true anoma-
lies among instances classified as anomalous. This
metric evaluates the reliability of the model’s positive
anomaly predictions.
5.1.4 Unsupervised Anomaly Detection Method
and Hyperparameters
The unsupervised anomaly detection methods utilized
in our experiments are enumerated below. For each
method, we adhered to the default hyperparameter
values provided by the respective libraries to maintain
consistency and reproducibility in our experimental
setup.
• Isolation Forest (Liu et al., 2008). Isolates obser-
vations by randomly selecting features and split
values to partition the data.
• K Nearest Neighbors (KNN) (Ramaswamy
et al., 2000). KNN views the anomaly score of
the input instance as the distance to its k-th near-
est neighbor.
• Principle Component Analysis (PCA) (Shyu
et al., 2003). PCA is a linear dimensionality re-
duction technique. When used for AD, it projects
the data to a lower dimensional space and uses the
reconstruction errors as anomaly scores.
• One-Class SVM (OCSVM) (Scholkopf et al.,
2001). OCSVM maximizes the margin between
the origin and the normal samples, and defines
the decision boundary as the hyperplane that de-
termines the margin.
• Subspace Outlier Detection (SOD) (Kriegel
et al., 2009). SOD aims to detect outliers in vary-
ing subspaces of high-dimensional feature space.
• Cluster-based Local Outlier Factor
(CBLOF) (He et al., 2003). CBLOF calcu-
lates the anomaly score by first assigning samples
to clusters, and then using the distance among
clusters as anomaly scores.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
446
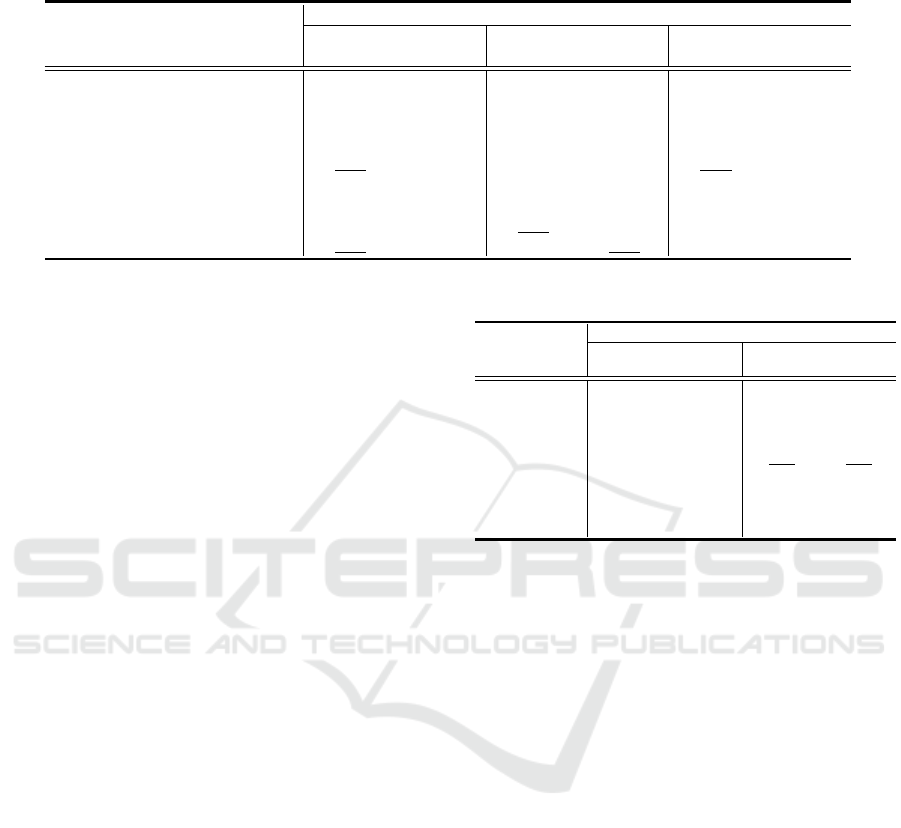
Table 1: Comparison of unsupervised anomaly detection performance using visible light data, NIR data, and combined
Visible+NIR data across various detection methods.
Method
Spectral Ranges
Visible light data NIR data Visible + NIR data
AUCROC Precision AUCROC Precision AUCROC Precision
Isolation Forest (Liu et al., 2008) 0.49 0.10 0.50 0.09 0.50 0.10
KNN (Ramaswamy et al., 2000) 0.67 0.44 0.63 0.41 0.64 0.46
PCA (Shyu et al., 2003) 0.49 0.09 0.49 0.08 0.49 0.09
OCSVM (Scholkopf et al., 2001) 0.49 0.09 0.49 0.08 0.49 0.08
SOD (Kriegel et al., 2009) 0.77 0.50 0.76 0.51 0.77 0.52
CBLOF (He et al., 2003) 0.53 0.16 0.51 0.12 0.50 0.10
ABOD (Kriegel et al., 2008) 0.71 0.25 0.75 0.29 0.75 0.23
LOF (Breunig et al., 2000) 0.68 0.27 0.77 0.52 0.78 0.45
COF (Tang et al., 2002) 0.77 0.60 0.78 0.65 0.78 0.70
• Angle-based Outlier Detector (ABOD) (Kriegel
et al., 2008). ABOD measures the variance in an-
gles between a point and pairs of other points.
Lower angle variance indicates a higher likeli-
hood of being an outlier.
• Local Outlier Factor (LOF) (Breunig et al.,
2000). LOF measures the local deviation of the
density of a given sample with respect to its neigh-
bors.
• Connectivity-based Outlier Factor(COF) (Tang
et al., 2002). COF uses the ratio of the average
chaining distance of data points and the average
chaining distance of k-th nearest neighbor of the
data point, as the anomaly score for observations.
5.2 Analysis of Different Spectral
Ranges for Anomaly Detection
Table 1 presents the performance of various anomaly
detection methods across different spectral ranges.
We evaluated the methods using visible light data,
NIR data, and the combined Visible+NIR data con-
structed through our band selection approach. The
highest performance for each metric is highlighted in
bold, with the second-highest underlined.
Our analysis shows that the COF method, applied
to combined Visible+NIR data, achieved the highest
performance with an AUCROC of 0.78 and a Preci-
sion of 0.70. This highlights the value of utilizing
both visible and NIR spectral ranges for effective wa-
ter anomaly detection.
Interestingly, when comparing the performance
between the visible light data and NIR data ranges, we
observed a slight advantage for the NIR data. For in-
stance, COF applied to NIR data yielded an AUCROC
of 0.78 and Precision of 0.65, compared to 0.77 and
0.60 for the visible light data, respectively. This
trend was consistent across several methods, suggest-
ing that the NIR data region is able to capture subtle
Table 2: Comparison of Anomaly Detection Methods.
Method
Data type
RGB HS
AUCROC Precision AUCROC Precision
Isolation Forest 0.50 0.09 0.50 0.10
KNN 0.54 0.17 0.64 0.46
PCA 0.49 0.09 0.49 0.09
OCSVM 0.49 0.09 0.49 0.08
SOD 0.62 0.28 0.77 0.52
CBLOF 0.50 0.11 0.50 0.10
ABOD 0.50 0.00 0.75 0.23
LOF 0.51 0.11 0.78 0.45
COF 0.51 0.11 0.78 0.70
spectral differences that are particularly relevant for
detecting anomalies in water samples.
Across all three types of spectral regions, we
noted similar performance patterns among the tested
methods. Distance-based anomaly detection ap-
proaches such as KNN, LOF and COF, along with
subspace-based methods like SOD, demonstrated par-
ticular efficacy for this task. The angle-based method,
ABOD, also showed promising results. In contrast,
methods such as Isolation Forest, PCA, and OCSVM
exhibited AUCROC values close to 0.5, indicating
poor efficacy for this anomaly detection task.
These findings underscore the importance of se-
lecting optimal spectral ranges and detection meth-
ods for water anomaly detection. The superior perfor-
mance of combined Visible+NIR data suggests that
HS approaches effectively capture a broader range of
anomalies. Additionally, the success of distance- and
subspace-based methods indicates that anomalies in
our dataset are better defined by local density varia-
tions or specific feature subspaces than by global dis-
tributions.
Anomalous Water Dataset Captured by Hyperspectral Cameras
447
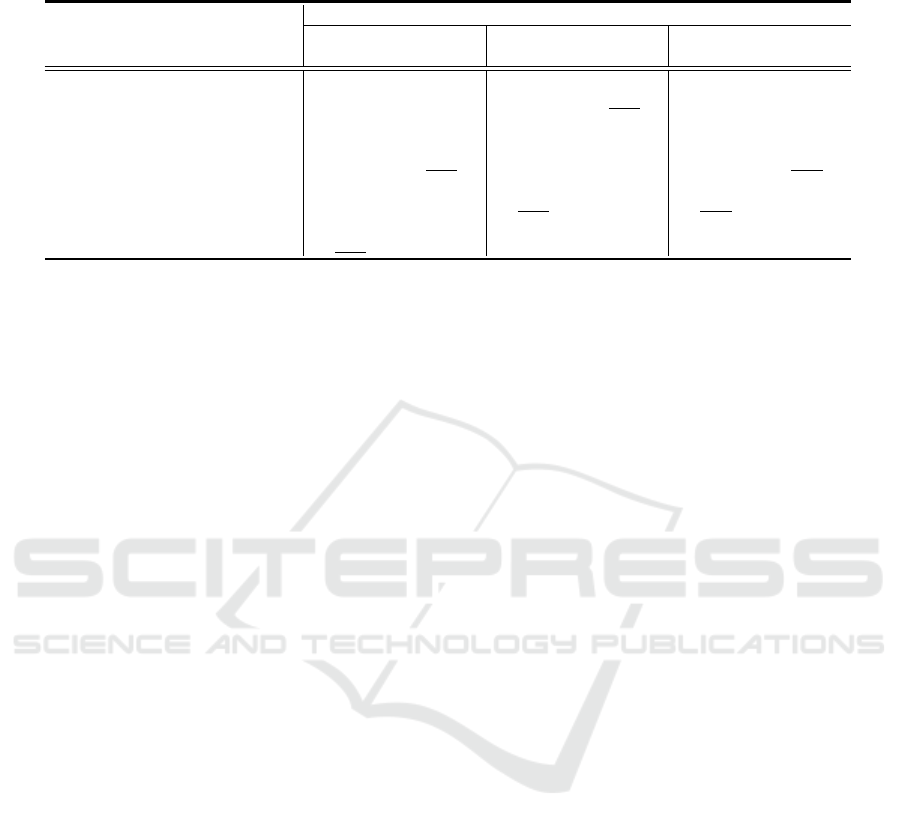
Table 3: Robustness to Unknown Anomalies: Unsupervised anomaly detection performance when trained on one anomalous
type and evaluated on other anomalous types.
Method
Training sample
detergent herbicide chorine bleach
AUCROC Precision AUCROC Precision AUCROC Precision
Isolation Forest (Liu et al., 2008) 0.50 0.03 0.49 0.09 0.49 0.09
KNN (Ramaswamy et al., 2000) 0.61 0.13 0.67 0.48 0.52 0.20
PCA (Shyu et al., 2003) 0.50 0.03 0.48 0.08 0.49 0.08
OCSVM (Scholkopf et al., 2001) 0.49 0.03 0.48 0.07 0.49 0.08
SOD (Kriegel et al., 2009) 0.81 0.23 0.71 0.45 0.65 0.40
CBLOF (He et al., 2003) 0.52 0.04 0.50 0.11 0.50 0.11
ABOD (Kriegel et al., 2008) 0.68 0.06 0.73 0.20 0.67 0.18
LOF (Breunig et al., 2000) 0.73 0.12 0.79 0.39 0.70 0.35
COF (Tang et al., 2002) 0.79 0.31 0.69 0.56 0.64 0.51
5.3 Comparison of Unsupervised
Anomaly Detection Performance
Between RGB and HS Data
Our experimental results, presented in Table 2,
demonstrate a clear superiority of HS imaging over
conventional RGB imaging for the anomaly detection.
For the HS data, we utilized a combined Visible+NIR
dataset spanning 400-1000 nm with 120 bands, as
detailed in Section 4.2. The table shows the per-
formance of various unsupervised anomaly detection
methods applied to both RGB and HS data, evaluated
using AUCROC and Precision metrics.
For RGB data, the subspace-based method SOD
exhibited the highest performance, achieving an AU-
CROC of 0.62 and Precision of 0.28. However, other
methods applied to RGB data failed to yield signifi-
cant results, with most approaches barely outperform-
ing random guessing.
In significant contrast to the RGB data results,
the application of these methods to HS data yielded
substantially improved outcomes. The COF method
demonstrated the best performance, attaining an AU-
CROC of 0.78 and an impressive Precision of 0.70.
Similarly, the SOD method also performed well with
HS data, achieving an AUCROC of 0.77 and Preci-
sion of 0.52.
It is noteworthy that multiple methods, including
COF, showed marked improvements when applied to
HS data compared to their RGB counterparts. This
consistent enhancement across various algorithms un-
derscores the inherent value of HS imaging in this
context.
These results provide compelling evidence that
HS imaging can capture subtle spectral differences
imperceptible to the human eye or standard RGB
cameras. The superior performance of anomaly de-
tection methods on HS data demonstrates its efficacy
in identifying potentially hazardous substances in wa-
ter, even when these substances are visually indistin-
guishable from normal samples.
5.4 Robustness to Unknown Anomalies
The robustness of anomaly detection methods to un-
known contaminants is an important consideration
for potential applications in real-world water qual-
ity monitoring. Table 3 presents our findings, where
models were trained on one type of anomalous sam-
ples and tested on others. For each training sample,
the best-performing method is highlighted in bold,
and the second-best is underlined.
As anticipated, performance decreased compared
to when all types of anomalous samples were in-
cluded in training. However, several methods still
demonstrated significant detection capabilities, par-
ticularly for herbicide and chlorine bleach. The COF
method showed the best overall performance, achiev-
ing an AUCROC of 0.69 and precision of 0.56 for
herbicide, and 0.64 and 0.51 respectively for chlorine
bleach.
Consistent with our previous results, distance-
based methods (KNN, LOF, COF) and the subspace-
based method (SOD) proved most effective across all
anomalous types. The angle-based method (ABOD)
also showed promise, especially for herbicide and
chlorine bleach detection. In contrast, Isolation For-
est, PCA, and OCSVM demonstrated poor efficacy in
this setting.
The observed variations in performance across
different training samples indicate the challenge of
generalizing anomaly detection models to unknown
contaminants. Detergent-trained models showed
lower generalization compared to herbicide or chlo-
rine bleach-trained models, suggesting that some con-
taminants may have more distinctive spectral signa-
tures allowing better generalization.
In conclusion, although detecting unknown con-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
448

taminants is challenging, our results demonstrate that
carefully selected unsupervised learning methods can
offer meaningful detection capabilities. The robust-
ness of these methods to unknown contaminants is
crucial for the practical implementation of water qual-
ity monitoring systems.
6 CONCLUSION
This paper presented a novel HS dataset for detect-
ing anomalous substances in water that are visually
indistinguishable. Our comprehensive spectral analy-
sis demonstrates the superiority of HS imaging over
conventional RGB imaging in capturing subtle dif-
ferences between normal water and water contami-
nated with anomalous substances. Experimental eval-
uations of various unsupervised anomaly detection
methods shows the effectiveness of distance-based
and subspace-based approaches, particularly when
utilizing combined visible and near-infrared spectral
data.
While challenges remain in detecting unknown
anomalies, our findings provide a foundation for fu-
ture work. Further work could explore advanced deep
learning techniques for HS data and methods to im-
prove generalization. Expanding the dataset to in-
clude more substances could also enhance this work’s
scope.
ACKNOWLEDGEMENTS
This research was supported by the KDDI Founda-
tion. We are grateful to our laboratory members for
their invaluable assistance in this work. Their meticu-
lous work in data acquisition is crucial to the success
of our work.
REFERENCES
Brando, V. E. and Dekker, A. G. (2003). Satellite hy-
perspectral remote sensing for estimating estuarine
and coastal water quality. IEEE transactions on geo-
science and remote sensing, 41(6):1378–1387.
Breunig, M. M., Kriegel, H.-P., Ng, R. T., and Sander, J.
(2000). Lof: identifying density-based local outliers.
SIGMOD Rec., 29(2):93–104.
Cao, Q., Yu, G., Sun, S., Dou, Y., Li, H., and Qiao, Z.
(2021). Monitoring water quality of the haihe river
based on ground-based hyperspectral remote sensing.
Water, 14(1):22.
Du, Q., Tang, B., Xie, W., and Li, W. (2021). Parallel and
distributed computing for anomaly detection from hy-
perspectral remote sensing imagery. Proceedings of
the IEEE, 109(8):1306–1319.
Eba Japan Co.Ltd. Hyper spetral camera NH9. https:
//ebajapan.jp/products/hyper-spectral-camera/.
He, Z., Xu, X., and Deng, S. (2003). Discovering
cluster-based local outliers. Pattern Recogn. Lett.,
24(9–10):1641–1650.
Kriegel, H.-P., Kr
¨
oger, P., Schubert, E., and Zimek, A.
(2009). Outlier detection in axis-parallel subspaces
of high dimensional data. In Proceedings of the
13th Pacific-Asia Conference on Advances in Knowl-
edge Discovery and Data Mining, PAKDD ’09, page
831–838, Berlin, Heidelberg. Springer-Verlag.
Kriegel, H.-P., Schubert, M., and Zimek, A. (2008). Angle-
based outlier detection in high-dimensional data. In
Knowledge Discovery and Data Mining.
Liu, F. T., Ting, K. M., and Zhou, Z.-H. (2008). Isolation
forest. In 2008 Eighth IEEE International Conference
on Data Mining, pages 413–422.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Ramaswamy, S., Rastogi, R., and Shim, K. (2000). Effi-
cient algorithms for mining outliers from large data
sets. SIGMOD Rec., 29(2):427–438.
Scholkopf, B., Platt, J. C., Shawe-Taylor, J., Smola, A., and
Williamson, R. C. (2001). Estimating the support of
a high-dimensional distribution. Neural Computation,
13:1443–1471.
Shyu, M.-L., Chen, S., Sarinnapakorn, K., and Chang, L.
(2003). A novel anomaly detection scheme based on
principal component classifier.
Su, H., Wu, Z., Zhang, H., and Du, Q. (2021). Hyperspec-
tral anomaly detection: A survey. IEEE Geoscience
and Remote Sensing Magazine, 10(1):64–90.
Tang, J., Chen, Z., Fu, A. W.-C., and Cheung, D. W.-L.
(2002). Enhancing effectiveness of outlier detections
for low density patterns. In Pacific-Asia Conference
on Knowledge Discovery and Data Mining.
VanderWoude, A. and Marshall, L. (2021). Hyperspectral
imagery to study harmful algal blooms (habs) of lake
erie, lake st. clair, and saginaw bay, lake huron of the
great lakes region.
Zhao, Y., Nasrullah, Z., and Li, Z. (2019). Pyod: A python
toolbox for scalable outlier detection. Journal of Ma-
chine Learning Research, 20(96):1–7.
Anomalous Water Dataset Captured by Hyperspectral Cameras
449
