
FFAD: Fixed-Position Few-Shot Anomaly Detection for Wire Harness
Utilizing Vision-Language Models
Powei Liao
1
, Pei-Chun Chien
2
, Hiroki Tsukida
2
, Yoichi Kato
3
and Jun Ohya
1
1
Department of Modern Mechanical and Engineering, Waseda University, Tokyo, Japan
2
AI Digital Division, Yazaki Corporation, Tokyo, Japan
3
Global Center for Science and Engineering, Waseda University, Tokyo, Japan
Keywords:
Few-Shot Learning, Anomaly Detection, Vision-Language Model.
Abstract:
Anomaly detection in wire harness assembly for automobiles is a challenging task due to the deformable
nature of cables and the diverse assembly environments. Traditional deep learning methods require large
datasets, which are difficult to obtain in manufacturing settings. To address these challenges, we propose
Fixed-Position Few-Shot Anomaly Detection (FFAD), a method that leverages pre-trained vision-language
models, specifically CLIP, to perform anomaly detection with minimal data. By capturing images from fixed
positions and using position-based learnable prompts and visual augmentation, FFAD can detect anomalies in
complex wire harness situations without the need for extensive data collection. Our experiments demonstrated
that FFAD achieves over 90% accuracy with fewer than 16 shots per class, outperforming existing few-shot
learning methods.
1 INTRODUCTION
With the rapid advancement of deep learning, manu-
facturing around the world is becoming increasingly
intelligent through integrating complex sensors and
the use of Internet of Things (IoT) (Wang et al.,
2018). The manufacturing sector has also seen a
steady increase in the adoption of intelligent indus-
trial robots, where their performance and problem-
solving ability have been substantially improved year-
by-year (Benotsmane et al., 2020). One can confi-
dently state that automation technologies, especially
robotics and digital solutions, are reshaping the pro-
duction landscape as we know it, making these pro-
cesses more flexible and efficient than ever before
(Karabegovi
´
c et al., 2018; Papulov
´
a et al., 2022).
However, despite the significant advancement in au-
tomation technologies, the “nerves and blood vessels”
of automobiles – wire harness – is still mostly handled
and manufactured by humans due to inherent difficul-
ties (Heisler et al., 2021).
Broadly speaking, a wire harness functions as
a bundle of cables that transmit power and electri-
cal signals between various parts of an automobile.
∗
The work described by this paper is a collaborative
research between Yazaki Corp. and Waseda University.
As automobiles become more sensor-reliant and with
electric vehicles (EVs) receive more attention, the de-
mand for wire harnesses of greater complexity con-
tinues to rise. However, given the declining avail-
ability of labour in many regions of the world, the
automation of wire harness manufacturing is rapidly
emerging as a prominent area of research (Navas-
Reascos et al., 2022). One particular interest is in the
ability to perform anomaly detection and quality as-
surance with deep-learning models. Such a system
would require a vision system capable of detecting
various anomalies during the manufacturing process.
With effective anomaly detection, the system can in-
tervene to halt an operation when necessary, thereby
preventing damage such as wire entanglement or for-
eign object intrusion. This also opens the possibility
for auto rectification to be performed.
Currently, anomaly detection for wire harnesses
remains challenging for several reasons. Firstly, ca-
bles – also referred to as deformable linear objects
(DLOs) – are non-rigid and highly deformable, mean-
ing their shape can change drastically during the
manufacturing process, complicating detection efforts
(Zhou et al., 2020). Secondly, the definition of an
anomaly can often be ambiguous as only parts of wire
harness are anomalous while the overall appearance
remains satisfactory. Thirdly, the layout of a wire har-
Liao, P., Chien, P.-C., Tsukida, H., Kato, Y. and Ohya, J.
FFAD: Fixed-Position Few-Shot Anomaly Detection for Wire Harness Utilizing Vision-Language Models.
DOI: 10.5220/0013164400003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 647-656
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
647
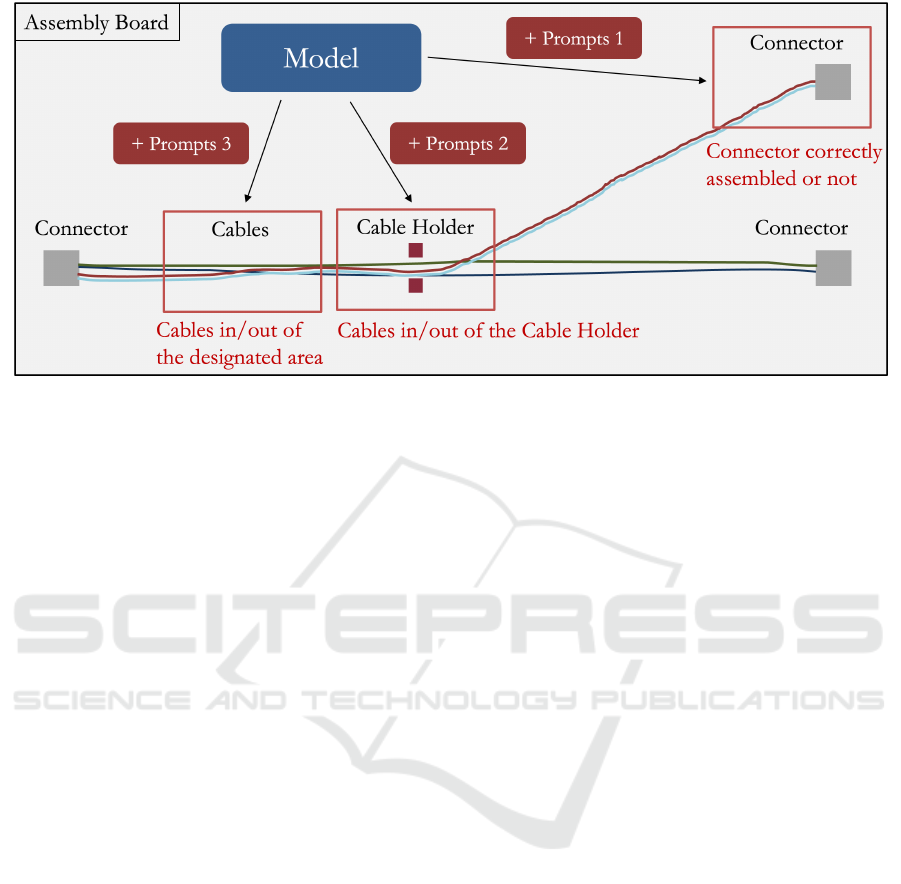
Figure 1: Overview of our application scenario. The model will not be trained throughout the entire process; instead, a pair
of prompts will be trained at each position to detect anomalies.
ness can vary significantly for each scenario, leading
to diverse and unpredictable assembly environments.
Finally, as with other industrial anomaly detection
tasks, most of the deep learning methods heavily de-
pend on available datasets. The high demand for both
the quantity and quality of datasets makes it challeng-
ing to reproduce the same results on varying produc-
tion lines.
To address these challenges, we propose a
method – Fixed-Position Few-Shot Anomaly Detec-
tion (FFAD) – which aims to detect user-defined
anomalies in complex wire harness situations without
requiring a large amount of data for learning and can
be easily adapted to different environments by lever-
aging the power of vision-language models.
Few-shot learning, which enables a model to per-
form downstream tasks with only a small amount of
data (typically fewer than 16 shots), has been gain-
ing increasing attention (Wang et al., 2020). CLIP
(Contrastive Language-Image Pre-Training) (Radford
et al., 2021), a vision-language model pre-trained on
400 million image-text pairs, aligns images and texts
in a shared embedding space, enabling it to associate
visual and textual concepts. This architecture allows
CLIP to demonstrate remarkable zero-shot learning
capabilities. The extensive pre-trained knowledge of
CLIP can be easily adapted to downstream tasks; for
instance, CoOp (Zhou et al., 2022b) adapts CLIP for
downstream classification tasks by making the text in-
put prompt learnable, then performs training on a few
samples from the target tasks. Building on a simi-
lar concept as CoOp, we propose our method FFAD
that leverages CLIP’s pre-trained knowledge to per-
form few-shot learning for anomaly detection in wire
harnesses.
Figure 1 shows an overview of our applica-
tion scenario. In traditional deep learning meth-
ods, the entire pre-trained model is fine-tuned with a
large amount of additional data to detect all possible
anomalies, which requires substantial labor and time.
Furthermore, if an additional anomaly class is to be
added, the whole model needs to be fine-tuned again.
To address this, the FFAD approach trains a specific
prompt for each position on the assembly board, al-
lowing for detection of different anomalies without
the need of full model fine-tuning. Additionally, we
introduce Position-based Visual Augmentation to fur-
ther enhance the model’s anomaly detection capabili-
ties. Our experiments show that FFAD outperformed
other few-shot learning methods, achieving over 90%
accuracy with 16 shots per class, less than 2 minutes
of training time, and requiring less than 200 KB to
store each prompt.
The main contributions of this paper are as fol-
lows:
• Proposed a novel wire harness anomaly detection
method – FFAD, and introduced Position-Based
Visual Augmentation to enhance model accuracy.
• Development of a wire harness anomaly dataset
for detection tasks and demonstrated FFAD’s su-
periority over existing methods through extensive
experiments.
• Ablation studies were carried out to investigate
the impact of visual prompt engineering and
model scaling on FFAD’s performance.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
648

2 RELATED WORK
2.1 Anomaly Detection for Wire
Harness
Wire harness is an essential component of automo-
biles, connecting various parts throughout the vehicle.
It transmits power and information between multiple
components, ranging from assistive systems to safety-
critical systems. Due to its importance, up to 90% of
the wire harness manufacturing process still requires
human involvement (Nguyen et al., 2021). There-
fore, automating wire harness production while main-
taining quality and reliability has become a signifi-
cant focus in recent years (Navas-Reascos et al., 2022;
Trommnau et al., 2019; Hermansson et al., 2013).
For such process to be automated, a vision system
capable of understanding the assembly scene and de-
tecting anomalies within said scene is crucial (Wang
et al., 2024). Li et al. (2024) developed a mobile-
based visual imaging system using YOLOv5 for real-
time detection and recognition, which is used to error-
proof the installation process of automotive wiring
harness relays. Nguyen et al. (2022) proposed a deep
learning-based data processing pipeline that utilizes
both real and synthetic point clouds for automated in-
spection. Chien et al. (2024) introduced a method for
classifying different cable tendencies, enabling fur-
ther anomaly detection through semantic segmenta-
tion by utilizing real and simulated RGB data.
While these methods can detect anomalies in the
wire harness process using deep learning techniques,
they often rely on large datasets and may require syn-
thetic data to achieve optimal performance. Our pro-
posed method requires only a small amount of data
by leveraging the pre-trained knowledge of vision-
language models.
2.2 Few-Shot Learning Utilizing
Vision-Language Models
Following the remarkable success of CLIP (Radford
et al., 2021), there has been a rising interest in re-
search on vision-language models. Numerous down-
stream tasks based on CLIP have emerged in recent
years, including multi-label classification (Sun et al.,
2022; Liao and Nakano, 2025), object detection (Gu
et al., 2021; Wang et al., 2022), image segmenta-
tion (Liang et al., 2023; L
¨
uddecke and Ecker, 2022;
Xie et al., 2022), image editing (Kwon and Ye, 2022;
Wei et al., 2022), and image captioning (Hessel et al.,
2021; Mokady et al., 2021).
Among the various studies, significant research
has been devoted to utilizing CLIP for few-shot learn-
Figure 2: RealSense D405 camera mounted on UR5e robot.
Table 1: The number of images from different position.
Position Normal Anomaly
Connector 80 51
Cable Holder 80 51
Cable 1 65 66
Cable 2 63 65
ing. CoOp (Zhou et al., 2022b) treats the prompt in
the input text as a set of learnable vectors, enabling
few-shot learning by directly training the prompt. Co-
CoOp (Zhou et al., 2022a), on the other hand, takes
a different approach by training a lightweight net-
work that uses the input image to adjust the prompt
adaptively, rather than training it directly. CLIP-
Adapter (Gao et al., 2024) enhances the pre-trained
CLIP image and text encoders by adding three fully
connected layers, performing few-shot learning by
training only the additional layers. Shtedritski et al.
(2023) demonstrates that visual prompt engineering,
such as simple image edits like drawing a red cir-
cle, can improve CLIP’s performance on complex
tasks. Building on the concepts of CoOp and visual
prompt engineering, our proposed method adapts the
pre-trained CLIP model for wire harness assembly
anomaly detection using few-shot learning. Addition-
ally, we incorporate Position-Based Visual Augmen-
tation to further enhance the model’s performance.
3 DATASET
We constructed a wire harness assembly dataset to
demonstrate the effectiveness of our method. As
shown in Figure 2, we mounted a camera (Intel Re-
alSense D405) onto a robot arm (Universal Robots
UR5e) to capture fixed-position images. For each
capture, the wire harness is automatically assembled
using the robot arm by traversing through registered
FFAD: Fixed-Position Few-Shot Anomaly Detection for Wire Harness Utilizing Vision-Language Models
649
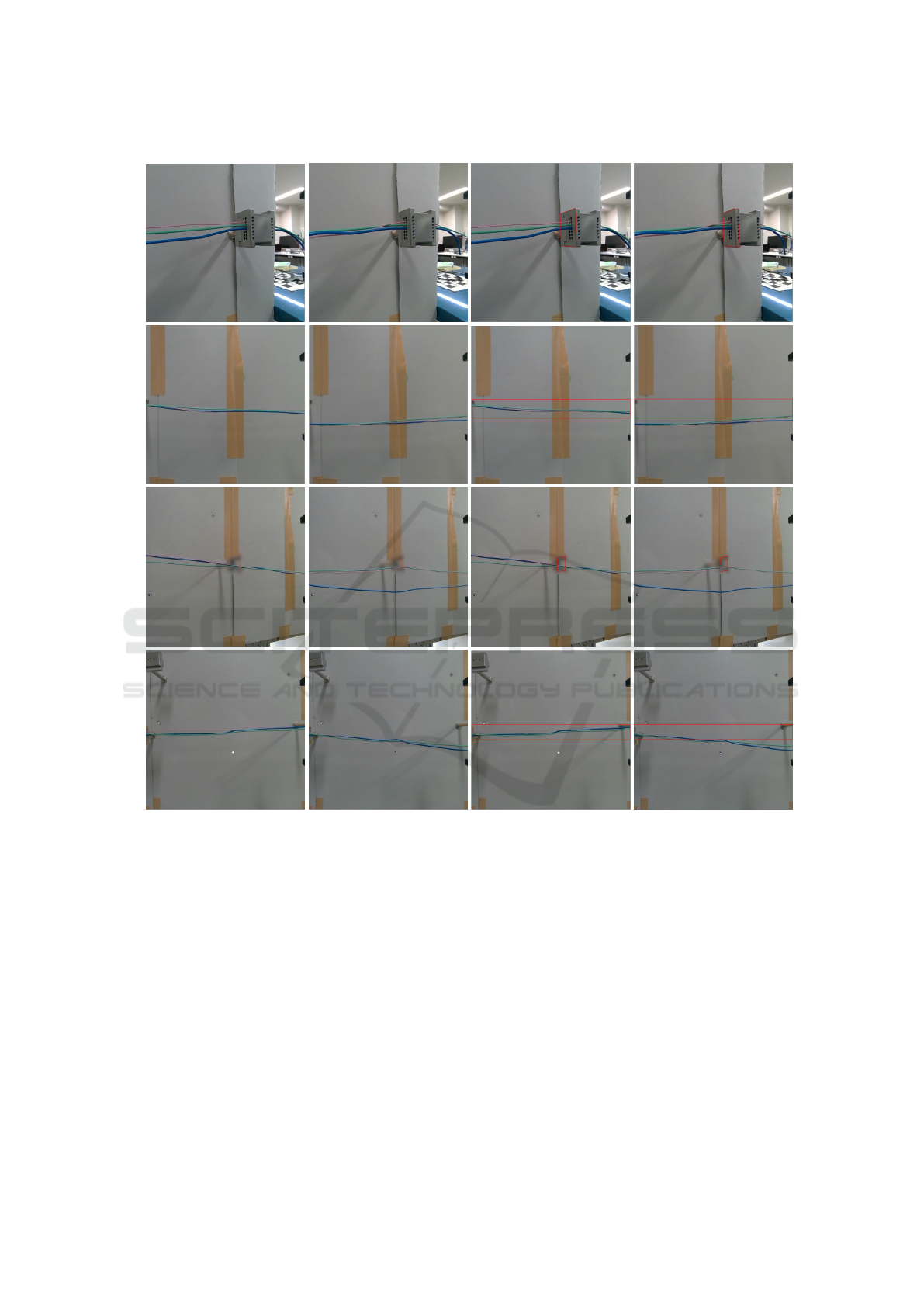
Normal Anomaly Normal(Augmented) Anomaly(Augmented)
ConnectorCable 1Cable HolderCable 2
Figure 3: Examples of each position from the dataset before and after visual augmentation. (The cable holder is blurred for
confidentiality reasons).
coordinates. Specifically, the robot arm first grabs the
connector from the starting base, attaches the cables
to the cable holder – a partially enclosed C-shaped ca-
ble supporter, and places the connector onto the goal
base. Then, images of the assembled wire harness are
captured from different fixed positions. As illustrated
in Figure 1, different positions have different anoma-
lies that need to be detected. For wire harnesses, some
common anomalies to be identified include, but are
not limited to:
• if the connector is appropriately fixed to its base
• if the cable is routed through the cable holder
• if the cable is situated within a certain region
In this dataset, images are taken from four different
positions: the connector, the cable holder, and two
positions along the cables. Table 1 shows the num-
ber of normal and anomalous images for each posi-
tion. Figure 3 provides examples of both normal and
anomalous situations for each position.
4 METHODOLOGY
The structure of the proposed Fixed-position Few-
shot Anomaly Detection (FFAD) is depicted in Fig-
ure 4. In our setup, the camera is mounted on the
robot arm and moves in conjunction with the robot’s
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
650

Figure 4: Illustration of our proposed approach FFAD.
movements. This arrangement ensures that the ”fixed-
position” requirement of FFAD can be effectively met
by registering robot coordinates. By capturing images
at the same coordinates, the camera’s position and an-
gle are guaranteed to be identical. FFAD takes two
inputs: the original image and a Position ID, which
identifies the location where the image was captured.
Based on the Position ID, we create two lists,
Position-Based Prompts List and Position-Based Fea-
ture Points List. In Position-Based Feature Points
List, four feature points are stored for each position.
These feature points are manually crafted for use in
the Position-Based Visual Augmentation.
The visual augmentation process uses OpenCV to
draw a quadrilateral on the original image based on
these feature points, allowing the model to better fo-
cus on the relevant area of the quadrilaterals. As
shown in Figure 3, each position has a specific vi-
sual augmentation policy. As for the connector, the
goal is to detect whether it is properly set on the base.
Thus, the feature points of quadrilateral are instead
defined along the edges of the connector and the base.
In the anomaly example of connector shown in Fig-
ure 3, distinguishing between normal and anomalous
situations is difficult when the visual augmentation
has not been applied. However, after applying vi-
sual augmentation, it is noticeable that the connector
is slightly misaligned to the left of the base.
Similarly for the cable position, we define a
quadrilateral around the cables as the appropriate re-
gion of which cables are to exist within. Any loose
cable that falls out of this region is to be classified as
lack of tension. Lastly, for the cable holder position,
a quadrilateral is drawn around the holder to highlight
the key area for detecting whether the cables are prop-
erly routed through the holder.
In Position-Based Prompts List, each position is
associated with a pair of learnable prompts: prompt
for normal, Prompt
N
, and prompt for anomaly,
Prompt
A
. There are N learnable vectors V
1
,· · · ,V
N
in
each prompt with the word “Normal” and “Anomaly”,
these prompts can be written as:
Prompt
N
id
= [V
id N
1
,V
id N
2
,...,V
id N
N
, Normal ] (1)
Prompt
A
id
= [V
id A
1
,V
id A
2
,...,V
id A
N
, Anomaly] (2)
These vectors are input into the pre-trained CLIP text
encoder E
t
, producing two Text-Feature Vectors T
N
and T
A
.
T
N
= E
t
(Prompt
N
id
) (3)
T
A
= E
t
(Prompt
A
id
) (4)
On the other side, the Position-Based Augmented im-
age is input into the pre-trained CLIP image encoder
E
i
, yielding the Image Feature Vector I:
I = E
i
(Augmented Image) (5)
Subsequently, the Image Feature Vector I is compared
to both Text-Feature Vectors, T
N
and T
A
, using cosine
similarity S
cos
to produce normal and anomaly logits:
S
N
= S
cos
(I,T
N
), S
A
= S
cos
(I,T
A
) (6)
Finally, with the pair of logits, the binary classifica-
tion output p is given by:
p =
exp(S
A
/τ)
exp(S
N
/τ) + exp(S
A
/τ)
(7)
FFAD: Fixed-Position Few-Shot Anomaly Detection for Wire Harness Utilizing Vision-Language Models
651
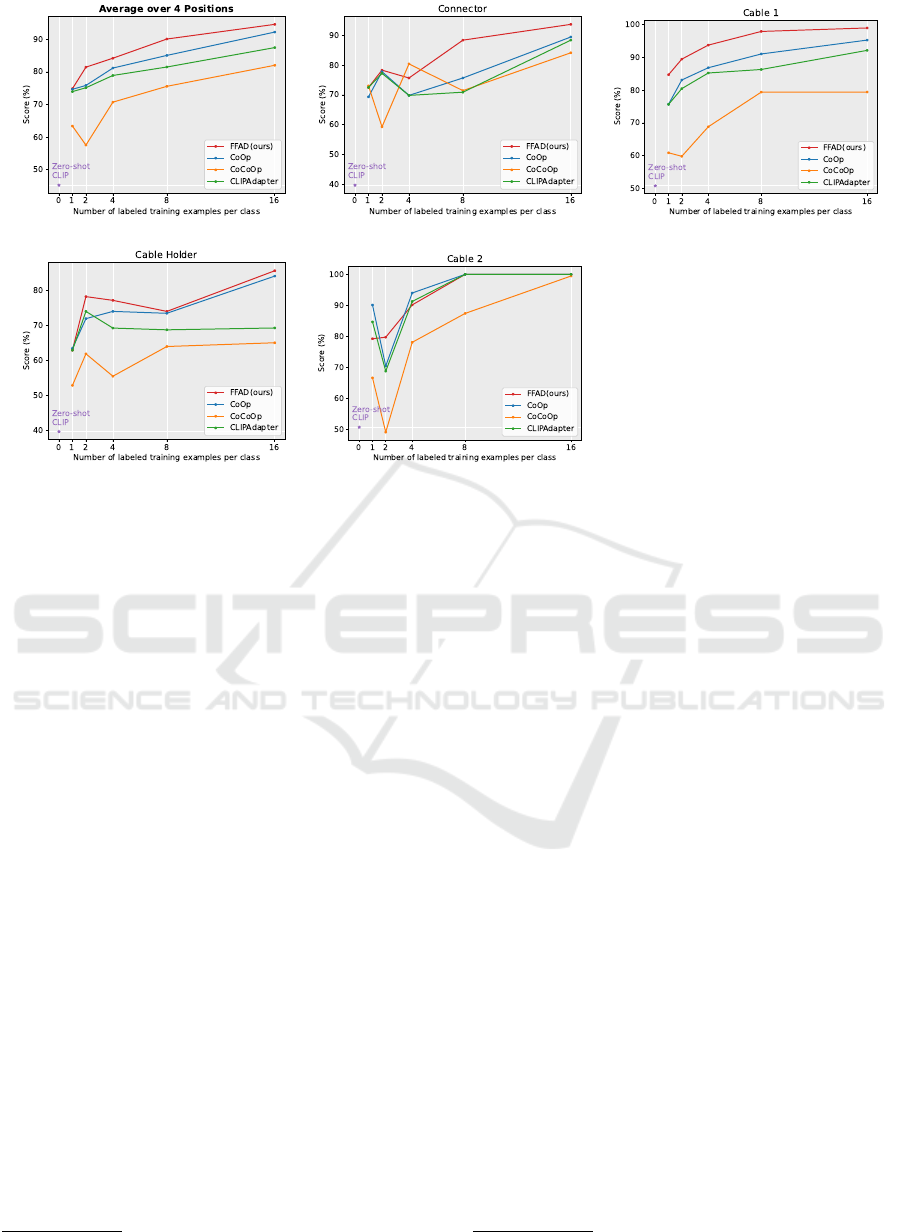
(a) (b) (c)
(d) (e)
Figure 5: Results of few-shot learning of the defined four positions.
5 EXPERIMENTS
5.1 Few-Shot Anomaly Detection for
Wire Harness
5.1.1 Training Setting
To evaluate the effectiveness of our method for
anomaly detection in wire harnesses, we trained and
tested it on the dataset described in Section 3. We
trained FFAD under the few-shot setups of 1, 2, 4, 8,
16 shots. These training examples were randomly se-
lected from the dataset and served as training and val-
idation sets, and the remaining data was used for test-
ing. In the Position-Based Learnable Prompts, we use
8 learnable vectors for each prompt, suffixed with the
class name “Normal” or “Anomaly” for each position.
We employed ViT-B/16 (Dosovitskiy, 2020) as our
choice of the pre-trained CLIP image encoder, as well
as the use of pre-trained models provided by Ope-
nAI.
1
The entire pre-trained model is kept untrained,
while only the learnable prompts are updated during
training. We did not use data augmentation technique
but used only normalization to preserve fixed-position
information as much as possible. We used cross-
entropy as the loss function and SGD as the optimizer.
The model was trained for 200 epochs with a learning
1
https://github.com/openai/CLIP
rate of 0.002. The overall implementation is based on
CoOp’s open-source code.
2
5.1.2 Baselines
For our task, every single position can be regarded as
a binary classification task. We compare our method
against one zero-shot method, CLIP, and three few-
shot methods: CoOp, CoCoOp, and CLIP-Adapter.
Both CoOp and CoCoOp utilize 8 learnable vectors,
which is consistent with our approach. All few-shot
methods follow the same training setup as FFAD and
utilize the ViT-B/16 pre-trained model from OpenAI.
5.1.3 Experiments Result & Analysis
The plot in Figure 5 shows the accuracy for four dif-
ferent positions as well as the average accuracy across
these positions. For few-shot learning methods, the
result is the average over three separate runs. As de-
picted in Figure 5(a), FFAD outperforms the other
three methods when averaged over 4 positions in ev-
ery few-shot setup.
Figure 5(b) shows that FFAD outperforms the
other methods at the “Connector” position when the
few-shot setup is of 8 or 16 shots. The visual differ-
ence between normal and anomaly is relatively subtle
when no adequate visual augmentation is applied, as
seen in Figure 3, which may be challenging for the
2
https://github.com/KaiyangZhou/CoOp
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
652
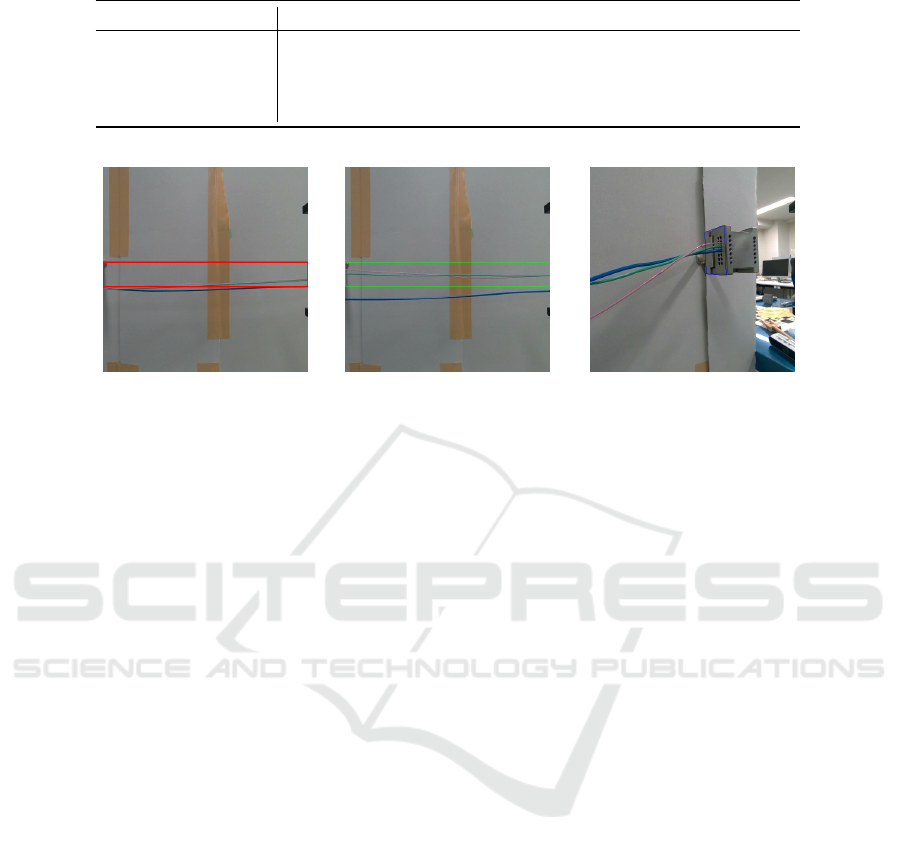
Table 2: Result of different visual prompt engineering.
Color Thickness Connector Cable 1 Cable Holder Cable 2 Average
Red 1 81.70 92.92 75.65 89.84 85.03
Red 2 82.85 90.69 76.30 90.27 85.00
Green 1 81.39 94.71 78.93 87.42 85.61
Blue 1 79.92 91.54 77.13 90.16 84.69
Color = ‘Red’, Thickness = 2 Color = ‘Green’, Thickness = 1 Color = ‘Blue’, Thickness = 1
(a) (b) (c)
Figure 6: Examples of visual prompt engineering with different settings.
model to distinguish differences. CoCoOp performs
well with fewer shots but is unstable and does not per-
form as effectively when the few-shot setups increase
to 8 or 16 shots.
Figure 5(c) plot demonstrates that FFAD signifi-
cantly outperforms the other methods at the “Cable
1” position, highlighting the effectiveness of visual
augmentation.
In Figure 5(d), FFAD shows a slight advantage
over the other methods at the “Cable Holder” po-
sition, indicating that visual augmentation aids the
model focusing on the relationship between the cable
and the cable holder, even though it is not as intuitive
as in other positions.
However, Figure 5(e) presents unexpected results
where FFAD does not surpass the other methods at
the “Cable 2” position. This is likely due to the rel-
ative simplicity of this task, as methods without vi-
sual augmentation were already achieving 100% ac-
curacy with 8 and 16 shots. As shown in Figure 3, the
background of “Cable 2” is relatively clean, the ap-
plication of visual augmentation may have introduced
noise, leading to a negative effect in setups with fewer
shots.
Zero-shot CLIP did not perform well across all
four positions, likely due to the specific examples in
our task not being available in the web-scraped data
that CLIP was originally trained on. Additionally,
using the terms ‘Normal’ and ‘Anomaly’ to describe
the two classes may have posed a challenge for the
model to comprehend when no additional training is
done. Meanwhile, all few-shot methods demonstrated
that with proper instruction, the pre-trained knowl-
edge can be effectively adapted to the downstream
task. This suggests that a small amount of task-
specific guidance can significantly enhance model
performance, leveraging the underlying capabilities
of the pre-trained model.
Overall, the results from Figure 5 show that inte-
grating visual augmentation allows FFAD to improve
anomaly detection performance across different posi-
tions and few-shot setups.
5.2 Ablation Study
To further assess the impact of the FFAD components,
an ablation study is carried out to examine the roles of
”Visual Prompt Engineering” and ”Model Scaling”,
aiming to gain deeper insights into their influence on
the performance of our few-shot anomaly detection
method.
5.2.1 Visual Prompt Engineering
Inspired by visual prompt engineering (Shtedritski
et al., 2023), we propose Position-Based Visual Aug-
mentation in FFAD, where a red quadrilateral is
drawn on the original image to emphasize region of
interest thus enhance the performance. To investigate
how different colors or thicknesses of the quadrilat-
eral in visual augmentation affect detection results,
we conducted experiments with various settings. Ta-
ble 2 presents the results of our model under differ-
ent visual augmentation configurations, averaged over
few-shot settings of 1, 2, 4, 8, and 16 shots, with 3
runs for each setting. Figure 6 shows examples of vi-
sual prompt engineering with different settings.
By adjusting the thickness to 2 pixels while keep-
FFAD: Fixed-Position Few-Shot Anomaly Detection for Wire Harness Utilizing Vision-Language Models
653
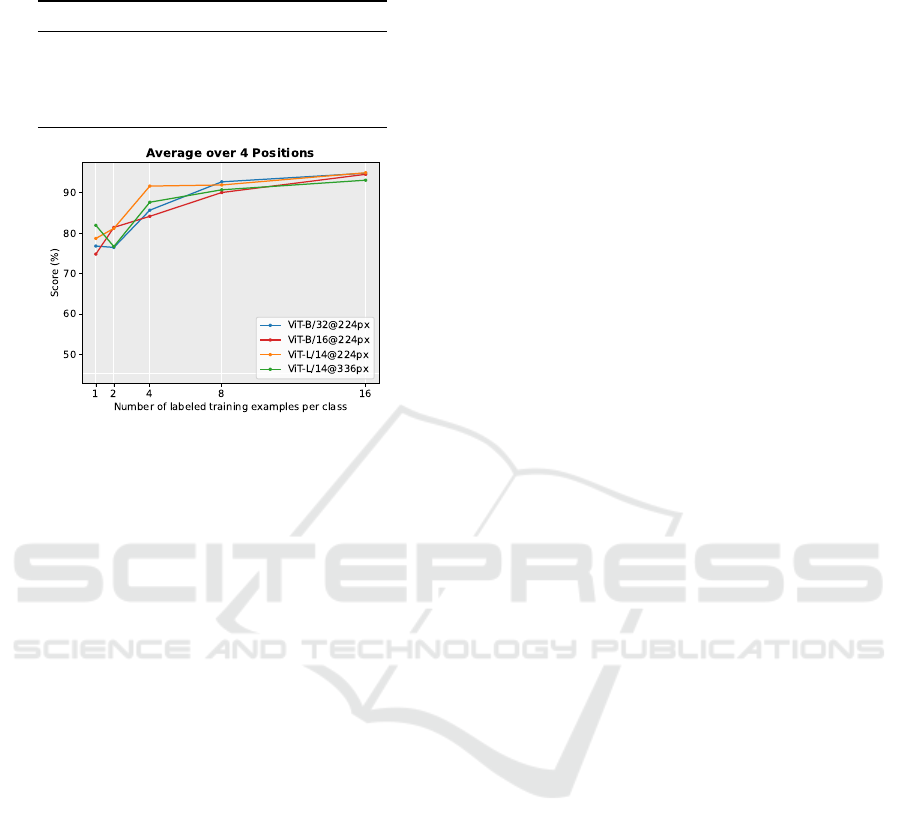
Table 3: Average result of few-shot learning on different
model scaling.
Models Average Accuracy
ViT-B/32@224px 85.32
ViT-B/16@224px 85.03
ViT-L/14@224px 87.70
ViT-L/14@336px 86.05
Figure 7: Result of few-shot learning on different model
scaling.
ing the color as “red”, there is no significant change in
performance. However, a slight decrease in accuracy
at position “Cable 2” was observed. This may be due
to the thicker red quadrilateral resembling the yellow
tape in the background, and the thicker line may occa-
sionally occlude the cable, as is shown in Figure 6(a),
causing confusion for the model.
Changing the color to “green” while keeping the
thickness at 1 pixel, we observed an increase in per-
formance at the “Cable 1” and “Cable Holder” posi-
tions but again a decrease at the “Cable 2” position.
This may be caused by the green quadrilateral having
more contrast with the backgrounds of “Cable 1” and
“Cable Holder” compared to the red quadrilateral, as
is shown in Figure 6(b), while there is less contrast at
“Cable 2” position.
A similar effect was observed with the color blue,
where it blended into the metallic texture of the con-
nector, as is shown in Figure 6(c), resulting in a per-
formance drop at the “Connector” position. However,
due to its higher contrast with the cable holder, the
performance improved at the “Cable Holder” posi-
tion.
In summary, the color of the quadrilateral and its
contrast with the background may have some impact
on performance. Choosing suitable colors for dif-
ferent positions that improve contrast could help en-
hance model performance.
5.2.2 Model Scaling
Another important factor to performance is the model
scaling of the pre-trained CLIP model. To understand
how different model sizes impact our task, four differ-
ent sizes of Vision Transformer (ViT) obtained from
OpenAI’s official CLIP implementation were evalu-
ated. Table 3 presents the results for these models.
Each result is averaged across four different positions,
where each position is averaged over five different
few-shot setups: 1, 2, 4, 8, and 16 shots. Each few-
shot setup result is again averaged over three runs. Ta-
ble 3 indicates that increasing the size of the vision
transformer model from B (Base) to L (Large) results
in a slight improvement in accuracy. However, chang-
ing the patch size of the ViT-B model from 32 to 16
did not significantly affect performance.
Interestingly, for the ViT-L/14 model, increasing
the input image resolution from 224×224 to 336×336
unexpectedly decreases the performance. This could
be due to that, in our task, the region of interest for
anomaly detection has been zoomed in. As a result,
the anomalies already occupy a significant portion of
the input image, and a resolution of 224×224 is suf-
ficient to capture the necessary details. Increasing
the input resolution further might introduce unnec-
essary complexity, making the model harder to train
and demanding more computational resources with-
out yielding much improvement.
Figure 7 shows the accuracy plot under differ-
ent few-shot configurations. The ViT model with a
Large size outperforms the Base size when trained
with fewer shots, such as 1 and 4. However, the
performance difference diminishes as the number of
shots increases to 8 or 16, where both models achieve
nearly the same accuracy.
6 CONCLUSIONS
In this paper, we proposed FFAD, a Fixed-Position
Few-Shot Anomaly Detection method for wire har-
ness assembly, which leverages pre-trained vision-
language models, specifically CLIP, to perform
anomaly detection with minimal data. By capturing
images from fixed positions and employing position-
based learnable prompts along with visual augmenta-
tion, FFAD can effectively detect anomalies in com-
plex wire harness situations without the need for
extensive data collection. Our experimental results
demonstrated that FFAD outperforms other few-shot
learning methods, and achieves over 90% accuracy
with fewer than 16 shots per class. The ablation stud-
ies indicated that visual prompt engineering, such as
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
654

adjusting the color and thickness of the augmentation,
can impact the model’s performance. Additionally,
model scaling shows that larger pre-trained models
can improve accuracy, especially in low-shot scenar-
ios. We hope that the ideas and empirical findings
presented in this paper provide valuable insights for
unlocking potential industrial applications that only
have access to limited data. In the future, we plan to
enable the model to learn the visual augmentation pol-
icy from the data itself, rather than relying on manual
decisions, in order to simplify the overall process.
REFERENCES
Benotsmane, R., Dud
´
as, L., and Kov
´
acs, G. (2020). Survey
on new trends of robotic tools in the automotive in-
dustry. In Vehicle and automotive engineering, pages
443–457. Springer.
Chien, P.-C., Liao, P., Fukuzawa, E., and Ohya, J. (2024).
Classifying cable tendency with semantic segmenta-
tion by utilizing real and simulated rgb data. In Pro-
ceedings of the IEEE/CVF Winter Conference on Ap-
plications of Computer Vision, pages 8430–8438.
Dosovitskiy, A. (2020). An image is worth 16x16 words:
Transformers for image recognition at scale. arXiv
preprint arXiv:2010.11929.
Gao, P., Geng, S., Zhang, R., Ma, T., Fang, R., Zhang,
Y., Li, H., and Qiao, Y. (2024). Clip-adapter: Bet-
ter vision-language models with feature adapters. In-
ternational Journal of Computer Vision, 132(2):581–
595.
Gu, X., Lin, T.-Y., Kuo, W., and Cui, Y. (2021).
Open-vocabulary object detection via vision and
language knowledge distillation. arXiv preprint
arXiv:2104.13921.
Heisler, P., Utsch, D., Kuhn, M., and Franke, J. (2021).
Optimization of wire harness assembly using human–
robot-collaboration. Procedia CIRP, 97:260–265.
Hermansson, T., Bohlin, R., Carlson, J. S., and S
¨
oderberg,
R. (2013). Automatic assembly path planning for
wiring harness installations. Journal of manufactur-
ing systems, 32(3):417–422.
Hessel, J., Holtzman, A., Forbes, M., Bras, R. L., and
Choi, Y. (2021). Clipscore: A reference-free eval-
uation metric for image captioning. arXiv preprint
arXiv:2104.08718.
Karabegovi
´
c, I., Karabegovi
´
c, E., Mahmi
´
c, M., and Husak,
E. (2018). Innovative automation of production pro-
cesses in the automotive industry. International Jour-
nal of Engineering.
Kwon, G. and Ye, J. C. (2022). Clipstyler: Image style
transfer with a single text condition. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 18062–18071.
Li, S., Yuan, M., Wang, W., Cao, F., Shi, H., Zhang, Y.,
and Meng, X. (2024). Enhanced yolo-and wearable-
based inspection system for automotive wire harness
assembly. Applied Sciences, 14(7):2942.
Liang, F., Wu, B., Dai, X., Li, K., Zhao, Y., Zhang,
H., Zhang, P., Vajda, P., and Marculescu, D. (2023).
Open-vocabulary semantic segmentation with mask-
adapted clip. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 7061–7070.
Liao, P. and Nakano, G. (2025). Bridgeclip: Automatic
bridge inspection by utilizing vision-language model.
In International Conference on Pattern Recognition,
pages 61–76. Springer.
L
¨
uddecke, T. and Ecker, A. (2022). Image segmentation
using text and image prompts. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 7086–7096.
Mokady, R., Hertz, A., and Bermano, A. H. (2021). Clip-
cap: Clip prefix for image captioning. arXiv preprint
arXiv:2111.09734.
Navas-Reascos, G. E., Romero, D., Stahre, J., and
Caballero-Ruiz, A. (2022). Wire harness assembly
process supported by collaborative robots: Literature
review and call for r&d. Robotics, 11(3):65.
Nguyen, H. G., Habiboglu, R., and Franke, J. (2022). En-
abling deep learning using synthetic data: A case
study for the automotive wiring harness manufactur-
ing. Procedia CIRP, 107:1263–1268.
Nguyen, H. G., Kuhn, M., and Franke, J. (2021). Manu-
facturing automation for automotive wiring harnesses.
Procedia Cirp, 97:379–384.
Papulov
´
a, Z., Ga
ˇ
zov
´
a, A., and
ˇ
Sufliarsk
`
y, L. (2022). Im-
plementation of automation technologies of industry
4.0 in automotive manufacturing companies. Proce-
dia Computer Science, 200:1488–1497.
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., et al. (2021). Learning transferable visual models
from natural language supervision. In International
conference on machine learning, pages 8748–8763.
PMLR.
Shtedritski, A., Rupprecht, C., and Vedaldi, A. (2023).
What does clip know about a red circle? visual
prompt engineering for vlms. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 11987–11997.
Sun, X., Hu, P., and Saenko, K. (2022). Dualcoop: Fast
adaptation to multi-label recognition with limited an-
notations. Advances in Neural Information Processing
Systems, 35:30569–30582.
Trommnau, J., K
¨
uhnle, J., Siegert, J., Inderka, R., and
Bauernhansl, T. (2019). Overview of the state of the
art in the production process of automotive wire har-
nesses, current research and future trends. Procedia
CIRP, 81:387–392.
Wang, H., Salunkhe, O., Quadrini, W., L
¨
amkull, D., Ore,
F., Despeisse, M., Fumagalli, L., Stahre, J., and Jo-
hansson, B. (2024). A systematic literature review of
computer vision applications in robotized wire har-
ness assembly. Advanced Engineering Informatics,
62:102596.
FFAD: Fixed-Position Few-Shot Anomaly Detection for Wire Harness Utilizing Vision-Language Models
655

Wang, J., Ma, Y., Zhang, L., Gao, R. X., and Wu, D. (2018).
Deep learning for smart manufacturing: Methods
and applications. Journal of manufacturing systems,
48:144–156.
Wang, Y., Yao, Q., Kwok, J. T., and Ni, L. M. (2020). Gen-
eralizing from a few examples: A survey on few-shot
learning. ACM computing surveys (csur), 53(3):1–34.
Wang, Z., Codella, N., Chen, Y.-C., Zhou, L., Yang, J.,
Dai, X., Xiao, B., You, H., Chang, S.-F., and Yuan, L.
(2022). Clip-td: Clip targeted distillation for vision-
language tasks. arXiv preprint arXiv:2201.05729.
Wei, T., Chen, D., Zhou, W., Liao, J., Tan, Z., Yuan, L.,
Zhang, W., and Yu, N. (2022). Hairclip: Design your
hair by text and reference image. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 18072–18081.
Xie, J., Hou, X., Ye, K., and Shen, L. (2022). Clims:
Cross language image matching for weakly super-
vised semantic segmentation. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 4483–4492.
Zhou, H., Li, S., Lu, Q., and Qian, J. (2020). A practical
solution to deformable linear object manipulation: A
case study on cable harness connection. In 2020 5th
International Conference on Advanced Robotics and
Mechatronics (ICARM), pages 329–333. IEEE.
Zhou, K., Yang, J., Loy, C. C., and Liu, Z. (2022a). Con-
ditional prompt learning for vision-language models.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 16816–
16825.
Zhou, K., Yang, J., Loy, C. C., and Liu, Z. (2022b). Learn-
ing to prompt for vision-language models. Inter-
national Journal of Computer Vision, 130(9):2337–
2348.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
656
