
Combining Procedural Generation and Genetic Algorithms
to Model Urban Growth
Etienne Tack
1,2 a
, Gilles
´
En
´
ee
2 b
and Fr
´
ed
´
eric Flouvat
3 c
1
INSIGHT SAS, Noumea, New Caledonia
2
University of New Caledonia, ISEA, Noumea, New Caledonia
3
Aix-Marseille Univ., CNRS, LIS, Marseille, France
fl
Keywords:
Procedural Generation, Genetic Algorithm, Agent-Based Modelling, Urban Growth.
Abstract:
In this paper, we present an approach to model spatial influences in multi-agent models using procedural
generation and genetic algorithms. We applied this approach in an urban growth model. In agent-based
simulations, the agents make decisions based on the perception of their environment. In our context, the
agents represent inhabitants who can create new buildings or extend the existing ones. Their behaviour is
ruled by spatial influences (e.g., the proximity of the road increases chances of building in the surrounding
areas). Procedural generation provides a good framework for representing the influences of the environment
on the agent’s behaviour. Each spatial feature is associated with an influence function. Their parameters
search space can be tremendous, making it difficult for field experts to set them manually. Consequently, we
use a genetic algorithm to optimize the parameters of these influence functions and train the model based on
three spatial measures (Chamfer distance, kernel density, and a density grid). This approach can be employed
likewise to any problem where the agent decisions are wholly or partly based on location. Our experiments
highlight the interest of our approach and the impact of the chosen fitness functions.
1 INTRODUCTION
Urban growth poses significant challenges, partic-
ularly in developing regions where informal settle-
ments often emerge without strict planning rules.
These areas, defined by UN-Habitat as lacking secure
tenure, basic infrastructure, and adherence to build-
ing regulations, are shaped by unspoken traditions
and geographical constraints. Existing urban growth
models, including multi-agent systems, often assume
rigid spatial structures like grid layouts, making them
poorly suited for informal contexts.
Multi-agent systems have been widely used to
simulate urban dynamics by modelling individuals
or households as agents. While grid-based ap-
proaches (Schelling, 1971; Barros, 2004; Zhang et al.,
2010; Jokar Arsanjani et al., 2013; Schwarz et al.,
2016; Picascia and Yorke-Smith, 2017; Agyemang
et al., 2022) simplify implementation, they rely on
strong assumptions, such as fixed spatial resolution
a
https://orcid.org/0000-0003-4131-1449
b
https://orcid.org/0000-0002-0140-5291
c
https://orcid.org/0000-0001-7288-0498
and uniform building characteristics, limiting realism.
More precise vector-based approaches (Augustijn-
Beckers et al., 2011) better reflect spatial variation
but often embed restrictive local assumptions about
construction patterns. In computer graphics, proce-
dural generation has also been applied to create vir-
tual cities (Smelik et al., 2014), yet these approaches
rarely validate spatial accuracy beyond visual assess-
ments.
Addressing these gaps, this study proposes a novel
method combining procedural generation and genetic
algorithms to model spatial dynamics in agent-based
urban growth simulations. Inspired by Tobler’s first
law of geography (Tobler, 1970), which emphasizes
proximity effects, we define two types of spatial in-
fluence functions and optimize their parameters using
NSGA-II. Our approach eliminates the need for em-
pirical assumptions and improves realism by learning
from spatial data. Experiments demonstrate the ap-
plicability of this method in generating realistic urban
growth patterns, validated through measures like den-
sity differences and Chamfer distance.
420
Tack, E., Énée, G. and Flouvat, F.
Combining Procedural Generation and Genetic Algorithms to Model Urban Growth.
DOI: 10.5220/0013165200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 420-428
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

2 THE INFLUENCE SUB-MODEL
Usually, agents are influenced by their local percep-
tion of the world. In our work, we use influence func-
tions to determine where agents may construct new
buildings at each iteration of the simulation. An in-
fluence function is defined, with the help of an expert
(geographer), for each environmental factor that is re-
lated to construction of new buildings.
Figure 1: Attraction-Repulsion influence function and its
application to generate influence maps for buildings (a),
roads (b) and paths (c). (White = 1, Grey = 0 and Black =
−1).
For example, the attraction-repulsion function in
Figure 1 (first plot) illustrates the influence of exist-
ing buildings or paths on the construction of a new
building. In this figure, x represents the distance be-
tween a candidate position for a new building and the
nearest existing building or path, and y its influence
on its construction. Figure 1(a) shows the influence
map of all existing buildings based on this function.
The black areas (positions of existing buildings) are
repulsive, and the white areas are attractive. This is
because new buildings cannot be built on top of each
other, but they tend to be close together (like a vil-
lage). Figure 1(b) represents the influence maps of
paths extrapolated from this same influence function.
Based on Figure 1, the attraction repulsion func-
tion can be more formally and more generally defined
as:
AR(x) =
−1 if x < λ
min
f (x) if λ
min
≤ x < λ
0
g(x) if λ
0
≤ x < λ
max
0 if x ≥ λ
max
(1)
where λ
min
, λ
0
and λ
max
are three distance thresh-
olds (λ
min
< λ
0
< λ
max
).
In equation 1, f (x) represents the increase in influ-
ence from repulsive to attractive and g(x) represents
the decrease in influence from attractive to neutral. To
define these two functions, we use the hyperbolic tan-
gent (tanh). It has been slightly modified to control
the slope of the curve and the length of the transition
between high repulsion (i.e. -1) and high attraction
(i.e. 1), as a basis for f (x) and g(x).
More precisely, these functions are defined by:
f (x) = tanh
(x − λ
min
) ×
2π
λ
0
− λ
min
∗ 2 − 1
g(x) = − tanh
(x −
λ
max
+ λ
0
2
) ×
2π
λ
max
− λ
0
∗
1
2
+
1
2
(2)
Of course, different types of factors have differ-
ent influences, i.e. potentially multiple influence func-
tions can be identified by expert and used in our ap-
proach. For instance, Figure 2 illustrates the influ-
ences of paths and slope as defined by our expert.
Such influence is based on the open distance function
illustrated in Figure 2.
Figure 2: Open Distance influence function and its applica-
tion to generate the influence maps of the paths (c) and the
slope (d). (White = 1, Grey = 0 and Black = −1).
The open distance function can also be defined us-
ing the same approach. Its formula is given below:
OD(x) =
1 if x < λ
min
h(x) if λ
min
≤ x < λ
max
−1 if x ≥ λ
max
h(x) = − tanh
(x −
λ
max
+ λ
min
2
) ×
2π
λ
max
− λ
min
(3)
Once all influence maps are processed, they are
weighted and aggregated into a single influence map
using the same equation introduced by (Emilien et al.,
2012).
I (P) =
−1 if ∃k such that I
k
(P) = −1
max(0,
∑
w
k
.I
k
(P)) in other cases.
.
(4)
where P is a candidate location, I
k
(P) is the attraction
value of the location P according to factor k in the
corresponding influence map, and w
k
the weight for
each influence factor k.
Figure 3 shows the results of the aggregation of
the four influence maps shown in Figures 1 and 2 (ren-
dered at a resolution of 1 m). The parameters λ
min
, λ
0
and λ
max
of these influence functions, as well as the
weights w
k
, are defined by reinforcement learning as
explained in the next section.
Finally, a gradient descent is done, based on this
aggregated influence map to find the most attractive
Combining Procedural Generation and Genetic Algorithms to Model Urban Growth
421
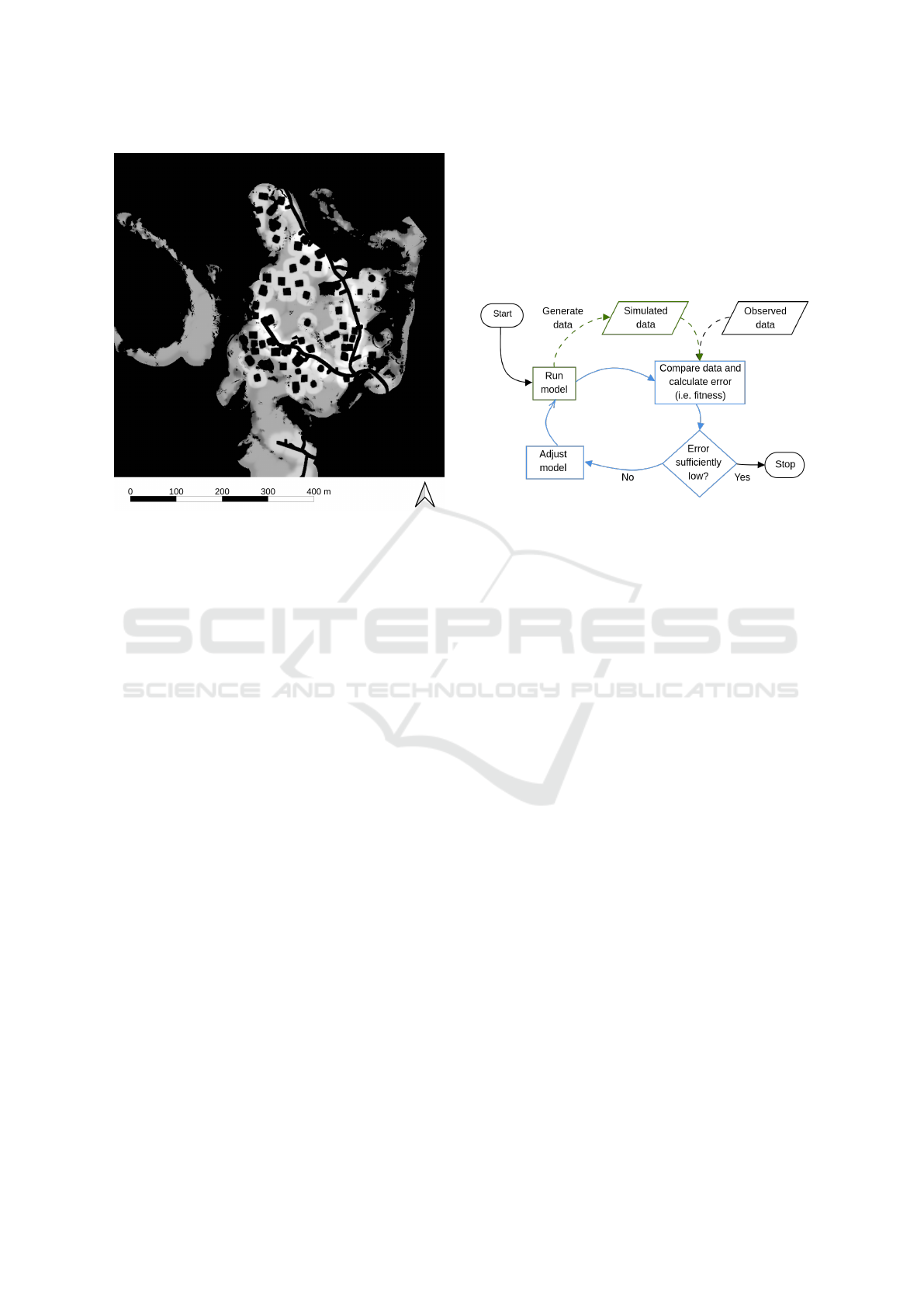
Figure 3: Aggregated Influence Map.
spots on the map without having to calculate the
whole map, which would be computationally expen-
sive as the map needs to be updated after every modi-
fication (e.g., adding a building).
3 DETERMINING PARAMETERS
OF INFLUENCE FUNCTIONS
USING A GENETIC
ALGORITHM
As previously explained, the influence sub-model is
defined by a set of influences functions, their param-
eters (λ
min
, λ
0
and λ
max
in Equations 1-3) and their
weights for the aggregation function (i.e. the w
k
pa-
rameters in equation 4). To optimize these parame-
ters, the genetic algorithm NSGA-II (Deb et al., 2002)
has been chosen. It stands for “Non-dominated Sort-
ing Genetic Algorithm II” and it is widely used as a
multi-objective optimisation algorithm.
3.1 Validation Measures
Genetic algorithms need fitness functions to evaluate
the accuracy of candidate solutions (in our case, pa-
rameters of the influence functions). As displayed in
Figure 4 (Crooks, 2018), measures compare the data
generated by the multi-agent model against observed
data. Then, the model is tuned, run and evaluated until
error is sufficiently low. Because the outcomes of the
simulations are a spatial representation of our model,
measures that take account of this spatial dimension
are needed. Three spatial measures have been chosen:
a grid-based density difference to verify that the over-
all placement of the building is more or less the same,
the Chamfer distance to quantify and summarise er-
rors into a single value, and a kernel density differ-
ence to show where the difference of density of build-
ings are.
Figure 4: The process of validation and calibration.
The grid-based density difference measure esti-
mates building density differences between simulated
and real-world data, based on a grid decomposition
of space. As illustrated in Figure 5, space is sliced
in a fixed number of cells. Each cell represents a dif-
ferent area, with a certain number of buildings within
it. The centroid of the building is used to determine
the cell it belongs to. Thus, we obtain a density ma-
trix representing the number of buildings in each area.
The grid-based density difference is the absolute dif-
ference between the grid-based density matrix of real-
world data and the one of simulated data.
Formally, given two grid-based density matrices A
and B, each value of the grid-based density difference
d
D
is given by:
d
D
(A,B) =
∑
i, j
|A
i j
− B
i j
|
where A
i j
and B
i j
are the number of buildings within
the cell (i, j).
The Chamfer distance is another validation mea-
sure considered in this work. It measures the differ-
ence between two point clouds. It sums the squared
distances for each point with its nearest neighbour in
the reference data set (see Figure 6). More formally,
for two non-empty subsets X and Y , the Chamfer dis-
tance d
C
(X,Y ) is:
d
C
(X,Y ) =
∑
x∈X
min
y∈Y
||x − y||
2
+
∑
y∈Y
min
x∈X
||x − y||
2
This measure will be applied to the centroids of the
buildings, and will give more information about local
differences.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
422
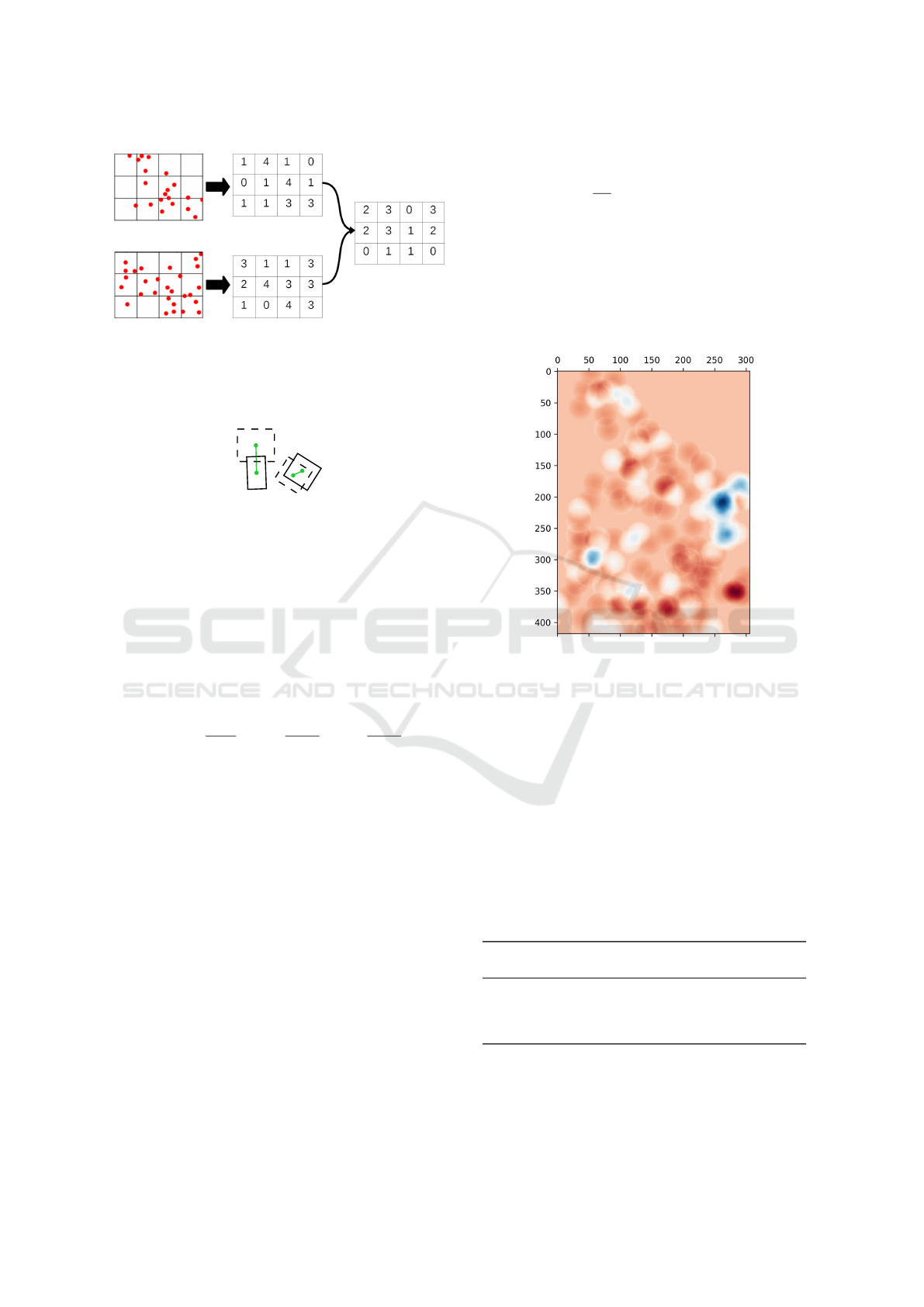
Figure 5: Example of density grid processing. The two first
figures represent two spatial distributions of buildings (each
red point represents the centroid of a building). The two
matrices in the middle represent the number of buildings
in the corresponding cell. The last matrix is the absolute
difference of the two previous density matrices.
Figure 6: Chamfer distance example (dotted shapes are
from the validation dataset, distances are calculated be-
tween centroids).
The last validation measure studied is the kernel
density difference. It is simply the difference of two
kernel density estimations. In a GIS context, kernel
density should be more expressive/relevant than point
density, since it will smooth the density at one point
by looking at the influence of points all around. More
formally, the kernel density estimation at given coor-
dinates (x,y) is given by
ˆ
f (x, y) =
1
n · h
2
n
∑
i=1
K
x − x
i
h
· K
y − y
i
h
where:
• n is the number of points,
• h is the bandwidth, which smooth the density es-
timate,
• K(u) is the kernel function, which is a symmetric
and non-negative function that integrates to 1 (in
our work, we used the Cosine kernel),
• x
i
and y
i
represent the coordinates of the ith point
in the input data set.
We process kernel density estimations for simu-
lated data and real-world ones. Then, we calculate
the difference between the two generated heat maps.
Figure 7 shows the kernel density difference between
two maps. Red areas represent a lack of buildings in
the simulation, and blue areas shows the contrary. If
the density is identical, it is displayed in white. To
use this measure as a fitness function for the genetic
algorithm, we take the average of absolute differences
for each pixel in both heatmaps, i.e.:
d
K
(A,B) =
1
wh
w
∑
i=1
h
∑
j=1
ˆ
f
A
(i, j) −
ˆ
f
B
(i, j)
where:
•
ˆ
f
A
is the kernel density over the buildings cen-
troids generated by the simulation,
•
ˆ
f
B
is the same but for the control dataset,
• (w,h) is the size of the bounding box of the two
combined datasets.
Figure 7: Example of Kernel Density Difference obtained
for an informal settlement located in Fiji.
4 EXPERIMENTS
4.1 Case Study
Our first case study is an informal settlement located
near Suva, Fiji (its size is 118,885 m
2
). As sum-
marised in Table 1, three spatial features (buildings,
roads and paths) of this settlement have been ex-
tracted by experts using visual interpretation for four
dates (1994, 2002, 2009 and 2019).
Table 1: Spatial Features and Data Sources
Date Image Image Extracted
Type Res. Features
1994 Aerial 2.3m 61 buildings
2002 Satellite 0.8m 83 buildings and 31 roads/paths
2009 Satellite 0.59m 103 buildings and 46 roads/paths
2019 Aerial 0.35m 129 buildings and 158 roads/paths
To integrate the slope into the model, a digital el-
evation model (DEM) has been interpolated from a
digital surface model (DSM) produced during a drone
image acquisition in 2019.
Combining Procedural Generation and Genetic Algorithms to Model Urban Growth
423

4.2 Experiment Setup
Our code is developed in Python, and is available on
a GitHub repository
1
, along with all the data used
for the experiments. The informal settlements agent-
based model is built on top of MESA (an agent-based
modelling framework), and we used PyMOO (Blank
and Deb, 2020) for optimizing the influence function
parameters. It is a Python package that implements
multi-objectives optimisation algorithms.
As shown in the Table 2, our expert identified two
types of influence functions:
• an attraction-repulsion function for buildings and
roads;
• an open distance function for paths (because
buildings can be built on paths);
• an open distance function for slope (because a flat
area is very attractive, while sloping ones are not).
Note that this function do not take a distance as in-
put, instead it takes the slope under the submitted
building.
Table 2: Genetic algorithm’s decision variables and con-
straints, associated with the influence functions.
Influence Parameters Constraints
Buildings λ
min
= X
0
0 ≤ X
0
≤ 100
(Attraction- λ
0
= X
0
+ X
1
0 ≤ X
1
≤ 100
Repulsion) λ
max
= X
0
+ X
1
+ X
2
0 ≤ X
2
≤ 100
w = X
3
/(X
3
+ X
7
+ X
10
+ X
13
) 0 ≤ X
3
≤ 1
Roads λ
min
= X
4
0 ≤ X
4
≤ 100
(Attraction- λ
0
= X
4
+ X
5
0 ≤ X
5
≤ 100
Repulsion) λ
max
= X
4
+ X
5
+ X
6
0 ≤ X
6
≤ 100
w = X
7
/(X
3
+ X
7
+ X
10
+ X
13
) 0 ≤ X
7
≤ 1
Paths λ
min
= X
8
0 ≤ X
8
≤ 100
(Open λ
max
= X
8
+ X
9
0 ≤ X
9
≤ 100
Distance) w = X
10
/(X
3
+ X
7
+ X
10
+ X
13
) 0 ≤ X
10
≤ 1
Slope λ
min
= X
11
0 ≤ X
11
≤ π/2
(Open λ
max
= X
12
0 ≤ X
12
≤ π/2
Distance) w = X
13
/(X
3
+ X
7
+ X
10
+ X
13
) 0 ≤ X
13
≤ 1
X
11
≤ X
12
Default settings of PyMOO’s NSGA-II imple-
mentation has been used. It involves a polynomial
mutation (set with a perturbation index to 20) and a
simulated binary crossover (with distribution index
set to 15 and the probability that it will happen set
to 0.9). NSGA-II population consists of 50 individu-
als, and the genetic algorithm stops when one of the
following termination criteria is met : the number of
300 generations is reached, or the objectives values
are stable for the last 30 generations.
To find the most appropriate fitness function for
NSGA-II, seven combinations of validation measures
1
github.com/etiennetack/spatial influences
have been tested on the three time periods of our case
study (1994 to 2002, 2002 to 2009, 2009 to 2019).
The grid-based density difference is computed using
a spatial resolution of 50m (each cell represents an
area of 50m × 50m). NSGA-II was run 50 times for
each possible combination of measures and for each
period.
4.3 Evaluating Learnt Influences
To analyse the results obtained, we first studied the
performance of each validation measure combina-
tion. To proceed, we compared the resulting influence
models against the real data (see Figure 8).
Figure 8: Each colour represents new buildings at each time
period: 1994 is grey, 2002 is pink, 2009 is yellow and 2019
is green.
In order to do so, we measured how many new
buildings in the field data are placed on areas marked
as repulsive by the model (-1). These buildings high-
light errors done by the influence sub-model. There-
fore, the influence error is obtained by:
Influence Error =
Number of New Buildings On Repulsive Areas
Number of New Buildings
Figure 9 displays the mean influence error for ev-
ery validation measures combinations (i.e. fitness
function in NSGA-II). As a baseline, we also calcu-
lated the influence error for random influence func-
tion parameters that comply with the same constraints
used for the genetic algorithm (see Table 2).
Those results show that NGSA-II was able to op-
timize the parameters of the influence functions in a
spatial agent-based context thanks to the chosen val-
idation measures. On average, the lowest influence
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
424
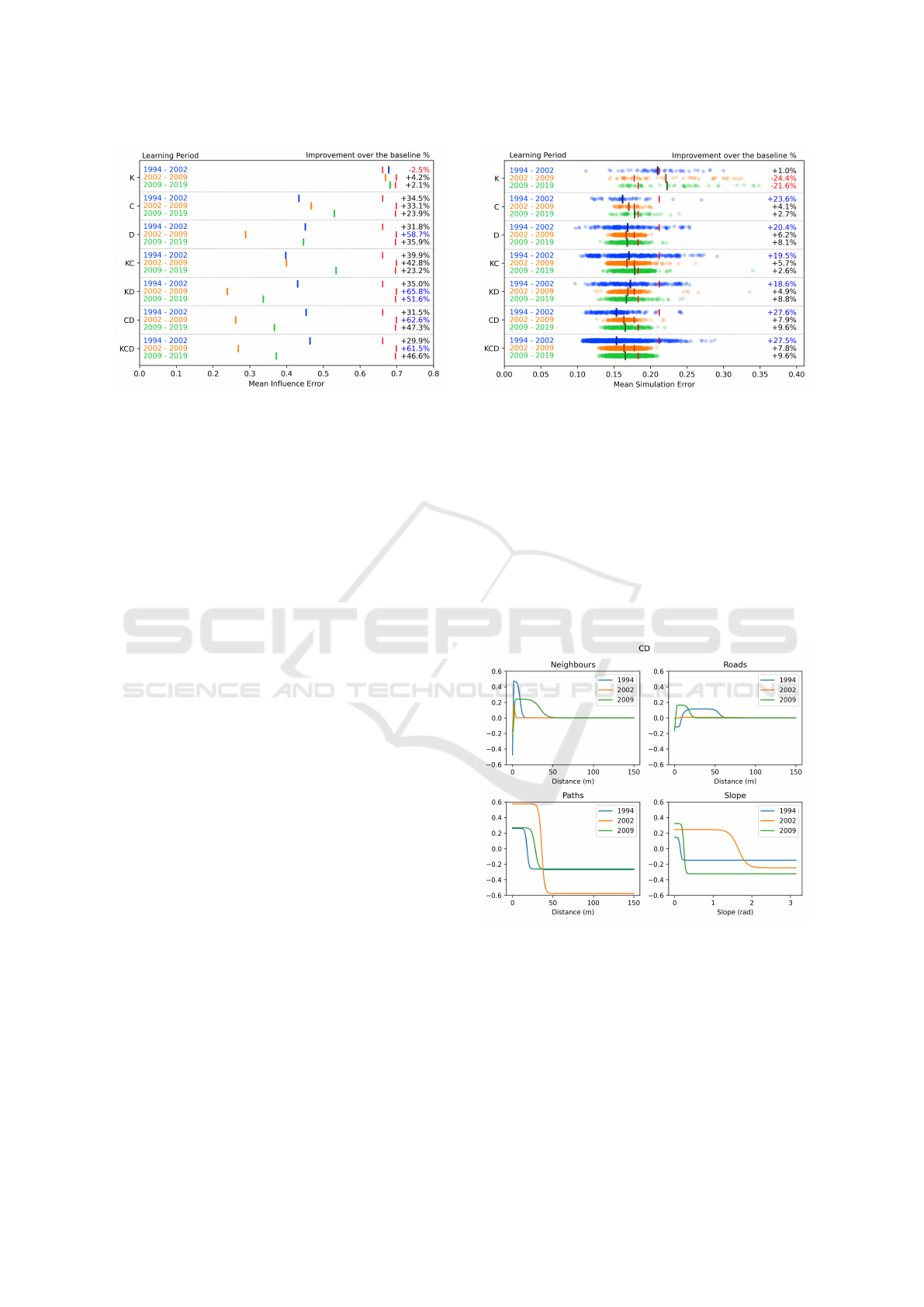
Figure 9: Application of the influence error for each mea-
sure combination and for each period.
error values are achieved using the grid-based den-
sity difference measure combined with at least an-
other measure.
4.4 Evaluating the Simulations
Although the influence error gives a good idea about
the quality of the influences functions, it does not
guarantee the realism of the resulting simulations.
Thus, a new error based on the simulation results ob-
tained using each resulting influence function set is
needed. A normalised Euclidean distance has been
used and is applied between the new buildings added
during simulation and the new buildings observed in
reality (see Table 1). One specificity when calculating
this distance is that when a validation building is se-
lected it is removed from the validation set, in such a
way that it cannot be used twice as a reference build-
ing.
As a baseline, random simulations had been con-
ducted. During those simulations, buildings are
placed randomly within the borders of the area of in-
terest without taking account of any kind of constraint
(e.g., buildings can be constructed over other build-
ings).
As shown in Figure 10, the best improvements
over random simulations are still reached using mod-
els obtained with the grid-based density difference
combined with at least another measure.
4.5 Learnt Models
Figure 11 shows the influence functions obtained with
the best combination of measures. Although the so-
lutions are near for the periods of 1994 to 2002 and
2009 to 2019, there is no unique model that works
from 1994 to 2019. The influence functions obtained
Figure 10: Simulation errors for each measure combina-
tion and each period (horizontal bars, represents the error
obtained for random simulations and the percentage num-
bers indicates the difference between the mean simulation
error of influence models and random simulations).
for 2002 are different from the two others. The in-
fluence of neighbouring buildings and roads on con-
structions are low in 2002 (mainly around zero). The
influence of paths seems also more important (values
are more extreme). In 2002, the slope only has a neg-
ative influence when it is close to 2 radians (x-axis),
while this value is much lower for 1994 and 2009 (0.5
radians).
Figure 11: Influence functions for the best solutions ob-
tained with the Chamfer distance and the grid-based density
measures.
These results are still very encouraging since this
approach attempts to simulate human choices by
only considering environmental factors, while there
are other factors that influence their behaviour (e.g.
socio-economic factors).
Combining Procedural Generation and Genetic Algorithms to Model Urban Growth
425
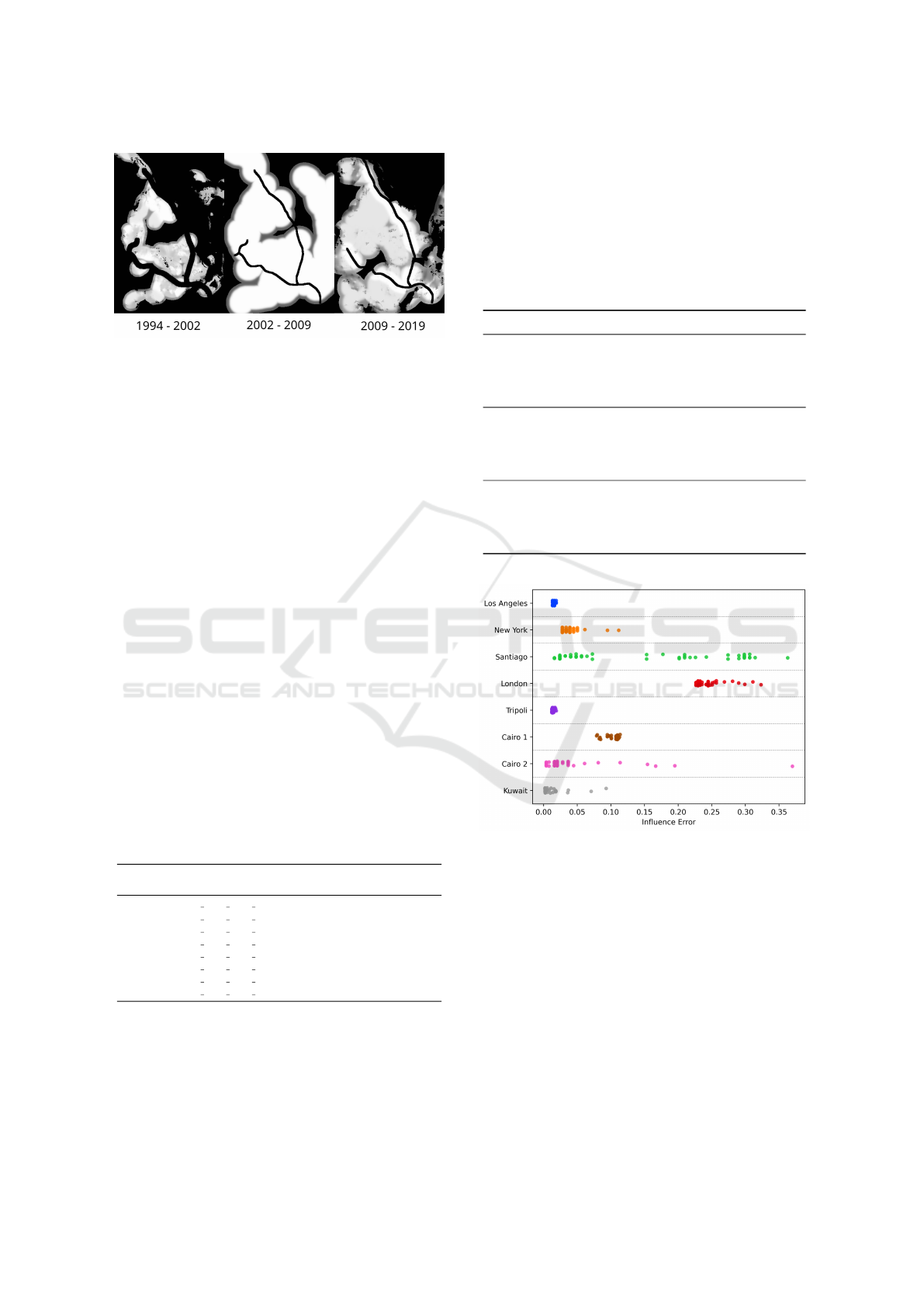
Figure 12: Influence maps of the influence functions dis-
played in the Figure 11.
5 EXPERIMENTING ON A
BROADER DATASET
To evaluate the robustness and generalisability of our
proposed urban growth model, we conducted a series
of experiments using the SpaceNet 7 dataset (Etten
et al., 2021). This dataset offers a comprehensive
collection of building footprints derived from high-
resolution satellite imagery for various cities all over
the world. providing an opportunity to test our ap-
proach on a broader and more diverse dataset com-
pared to the controlled datasets used in earlier sec-
tions of the study. This gives us larger and more
diverse datasets than those presented previously on
Suva. For this experiment, we chose data (annotated
building footprints) from cities in multiple geographic
regions. These regions vary in urban density, devel-
opment patterns, and environmental features, mak-
ing this dataset particularly suitable for stress-testing
our model’s capacity to generalize across different ur-
ban morphologies. We also specifically selected areas
where the number of building did not decrease over
time. The selected datasets, are displayed in Table 3.
Table 3: SpaceNet 7.
SpaceNet 7 Simple Size Building
Code Name (sq. km.) Delta
L15-0368E-1245N 1474 3210 13 Los Angeles 15.58 366
L15-0577E-1243N 2309 3217 13 New York 15.83 169
L15-0632E-0892N 2528 4620 13 Santiago 19.58 122
L15-1025E-1366N 4102 2726 13 London 9.37 326
L15-1138E-1216N 4553 3325 13 Tripoli 17.25 1001
L15-1203E-1203N 4815 3378 13 Cairo 1 17.96 1002
L15-1204E-1204N 4819 3372 13 Cairo 2 17.24 240
L15-1296E-1198N 5184 3399 13 Kuwait 18.38 3082
The road network data was extracted from Open-
StreetMap (OpenStreetMap contributors, 2017), pro-
viding detailed transportation infrastructure for the re-
gions in the SpaceNet 7 dataset. Additionally, we in-
corporated elevation data from the FAMDEM dataset,
allowing us to account for topographical influences on
urban growth. The genetic algorithm is still NSGA-II,
with the same parameters. We executed one training
per dataset. As shown in the Table 4, the only dif-
ference in the setup is the deletion of the paths influ-
ence because there are no such footpaths in the Open-
StreetMap data.
Table 4: Learning variables and constraints for SpaceNet 7
data.
Influence Parameters Constraints
Buildings λ
min
= X
0
0 ≤ X
0
≤ 100
(Attraction- λ
0
= X
0
+ X
1
0 ≤ X
1
≤ 100
Repulsion) λ
max
= X
0
+ X
1
+ X
2
0 ≤ X
2
≤ 100
w = X
3
/(X
3
+ X
7
+ X
10
) 0 ≤ X
3
≤ 1
Roads λ
min
= X
4
0 ≤ X
4
≤ 100
(Attraction- λ
0
= X
4
+ X
5
0 ≤ X
5
≤ 100
Repulsion) λ
max
= X
4
+ X
5
+ X
6
0 ≤ X
6
≤ 100
w = X
7
/(X
3
+ X
7
+ X
10
) 0 ≤ X
7
≤ 1
Slope λ
min
= X
11
0 ≤ X
8
≤ π/2
(Open λ
max
= X
12
0 ≤ X
9
≤ π/2
Distance) w = X
10
/(X
3
+ X
7
+ X
10
) 0 ≤ X
10
≤ 1
X
9
≤ X
10
Figure 13: Influence Error SpaceNet 7.
For each city, 10 training runs were conducted,
and we then calculated the influence error and sim-
ulation error on the resulting influence models. Fig-
ure 13 illustrates the influence error for each solu-
tion obtained from the genetic algorithm. As shown
by this figure, the results of our approach on these
datasets are of the same order of magnitude as those
obtained for Suva. The simulation error (Figure 14)
yields better results. In fact, the influence error is sen-
sitive to the quality of the field data. For example,
if the road network is not spatially accurate enough,
roads can sometimes “run over” buildings in the data.
In this case, the influence model can model that there
should be no buildings on the roads, but since this
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
426
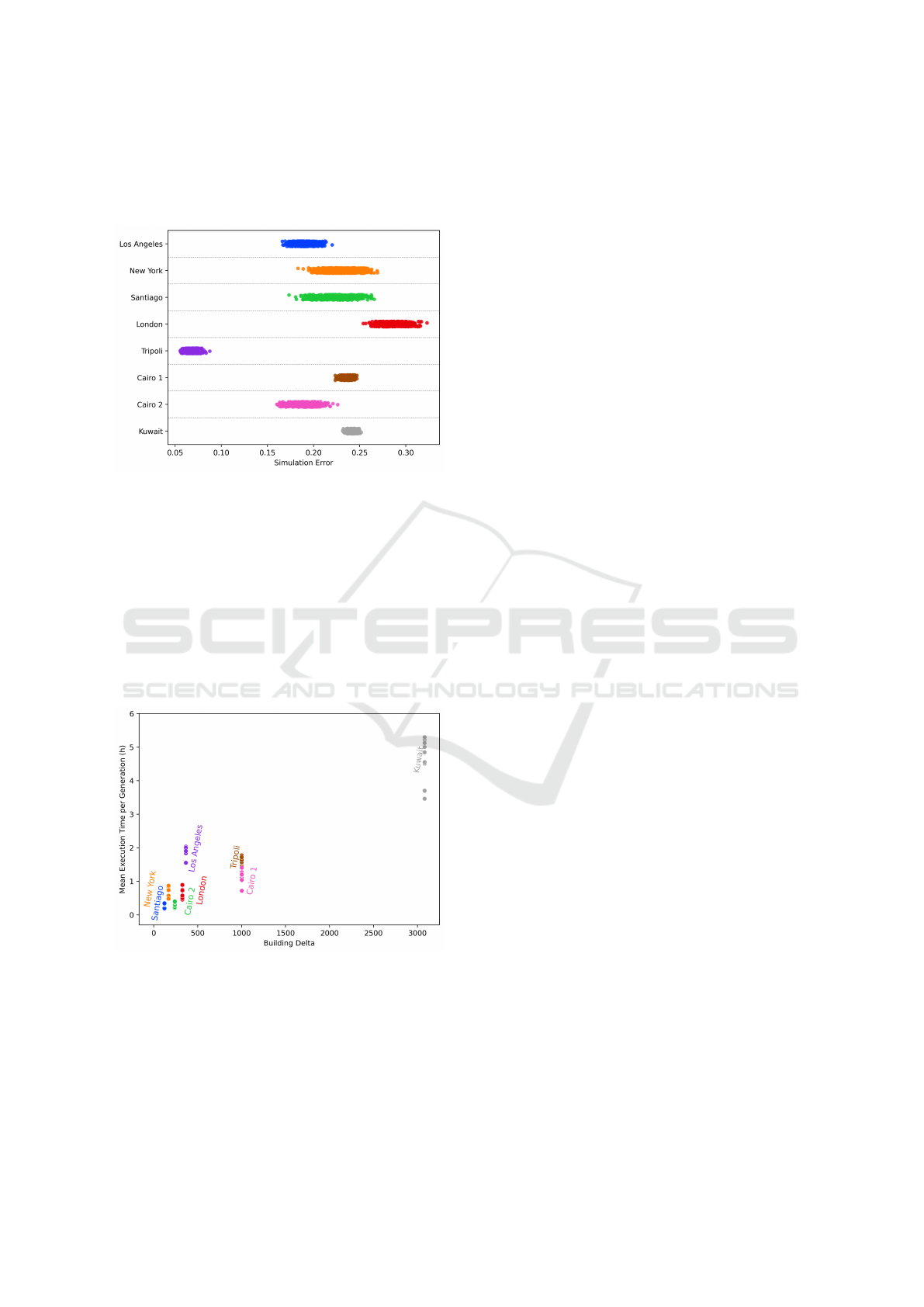
happens in the field data, it will be counted as an er-
ror of the influence model. For example, this happens
relatively often in the London dataset, which is why
performances are worse.
Figure 14: Simulation error for SpaceNet 7.
Figure 15 illustrates the relationship between exe-
cution time per generation using one thread (in hours)
and the number of new buildings (urban growth) of
the different SpaceNet’s datasets. Naturally, the more
new buildings there are, the longer the simulation
time will be. For example, the Kuwait dataset is the
bigger, and it is associated to the longest execution
time (around 5 hours). In contrast, datasets like New
York, London, and Santiago, which have fewer build-
ings, experience much shorter execution times (under
1 hour).
Figure 15: Execution time in relation to the size of the build-
ing delta for each dataset.
6 CONCLUSIONS AND
PERSPECTIVES
This study introduces a novel approach combin-
ing procedural generation and genetic algorithms to
model spatial influences in agent-based urban growth
simulations. By formalizing environmental factors
through mathematical functions and optimizing their
parameters with NSGA-II, we generate realistic urban
growth patterns, validated using spatial measures like
grid-based density differences and Chamfer distance.
However, some notable differences between the
simulation results and the actual spatial distribution
of buildings remain. Experts believe that this is cer-
tainly due to the fact that the human factor has not
yet been taken into account in the agent-based model.
It is known in the literature that it has a strong impact
on the urban growth of such informal settlements. De-
spite these discrepancies with real-world data, our re-
sults demonstrate the method’s effectiveness and po-
tential for broader applications.
Future work will include applying the approach
to diverse regions, integrating time-series analysis
for dynamic modelling, and incorporating socio-
economic factors to better reflect human behaviours.
Enhancements such as generating realistic building
shapes and simulating road and path evolution are
also planned, aiming for a comprehensive, adaptable
urban modelling framework.
ACKNOWLEDGEMENTS
We would like to acknowledge the French govern-
ment having supported financially a CIFRE doctoral
contract in collaboration with the INSIGHT company.
We also thank Thomas Gaillard (Ecosophy) and the
University of the South-Pacific for the data acquisi-
tion on the site of Valenicina in Fiji, including the
Fijian students who participated during the socio-
economical survey. And more specifically, Thomas
Gaillard for his several expert returns during the mod-
elling.
REFERENCES
Agyemang, F. S. K., Silva, E., and Fox, S. (2022). Mod-
elling and simulating ‘informal urbanization’: An in-
tegrated agent-based and cellular automata model of
urban residential growth in Ghana. Environment and
Planning B: Urban Analytics and City Science.
Augustijn-Beckers, E.-W., Flacke, J., and Retsios, B.
(2011). Simulating informal settlement growth in
Dar es Salaam, Tanzania: An agent-based housing
model. Computers, Environment and Urban Systems,
35(2):93–103.
Barros, J. (2004). Simulating Urban Dynamics in Latin
American Cities. In Atkinson, P., Wu, F., Foody, G.,
Combining Procedural Generation and Genetic Algorithms to Model Urban Growth
427

and Darby, S., editors, GeoDynamics, pages 313–328.
CRC Press.
Blank, J. and Deb, K. (2020). pymoo: Multi-objective opti-
mization in python. IEEE Access, 8:89497–89509.
Crooks, A. (2018). Agent-Based Modelling and Geograph-
ical Information Systems: A Practical Primer. Spa-
tial Analysis and GIS. SAGE Publications, Thousand
Oaks, CA, 1st edition edition.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
Nsga-ii. IEEE transactions on evolutionary compu-
tation, 6(2):182–197.
Emilien, A., Bernhardt, A., Peytavie, A., Cani, M.-P., and
Galin, E. (2012). Procedural generation of villages on
arbitrary terrains. The Visual Computer, 28(6-8):809–
818.
Etten, A. V., Hogan, D., Martinez-Manso, J., Shermeyer, J.,
Weir, N., and Lewis, R. (2021). The multi-temporal
urban development spacenet dataset.
Jokar Arsanjani, J., Helbich, M., and de Noronha Vaz, E.
(2013). Spatiotemporal simulation of urban growth
patterns using agent-based modeling: The case of
Tehran. Cities, 32:33–42.
OpenStreetMap contributors (2017). Planet dump re-
trieved from https://planet.osm.org . https://www.
openstreetmap.org.
Picascia, S. and Yorke-Smith, N. (2017). Towards an
agent-based simulation of housing in urban beirut. In
Agent Based Modelling of Urban Systems, pages 3–
20. Springer International Publishing.
Schelling, T. C. (1971). Dynamic models of segregation.
Journal of mathematical sociology, 1(2):143–186.
Schwarz, N., Flacke, J., and Sliuzas, R. (2016). Modelling
the impacts of urban upgrading on population dynam-
ics. Environmental Modelling & Software, 78:150–
162.
Smelik, R. M., Tutenel, T., Bidarra, R., and Benes, B.
(2014). A survey on procedural modelling for vir-
tual worlds. In Computer Graphics Forum, volume 33,
pages 31–50. Wiley Online Library.
Tobler, W. R. (1970). A computer movie simulating urban
growth in the detroit region. Economic geography,
46(sup1):234–240.
Zhang, H., Zeng, Y., Bian, L., and Yu, X. (2010). Modelling
urban expansion using a multi agent-based model in
the city of changsha. Journal of Geographical Sci-
ences, 20:540–556.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
428
