AI-Accelerated Viewshed Computation for High-Resolution Elevation
Models
C
´
edric Schwencke, Dominik St
¨
utz and Dimitri Bulatov
a
Fraunhofer IOSB Ettlingen, Gutleuthausstrasse 1, 76275 Ettlingen, Germany
Keywords:
Viewshed Computation, Visibility Analysis, Neural Networks, Digital Terrain Models, Digital Surface
Models, Supervised Learning, GIS, Environmental Monitoring.
Abstract:
Viewshed computation, essential for visibility analysis in GIS applications, involves determining visible areas
from a given point using the digital terrain model (DTM) and digital surface model (DSM). The traditional
methods, though accurate, can be computationally intensive, especially with increasing search distances and
high-resolution elevation DSMs. This paper introduces a novel approach leveraging neural networks to es-
timate the farthest visible point (FVP). At this point the viewshed computation could be aborted, which sig-
nificantly reducing computation time without compromising accuracy. The proposed method employs a fully
connected neural network trained on varied terrain profiles, achieving over 99% accuracy in visibility predic-
tions while reducing the required amount of computations by more than 90%. This approach demonstrates
substantial performance gains, making it suitable for applications requiring fast visibility analysis.
1 MOTIVATION
The computation of viewshed in outdoor point clouds,
which are often sampled into more manageable
DSMs, has numerous applications. For instance, ac-
cording to (Pan et al., 2020), viewshed analysis can
distinguish visible and invisible areas from a DSM in
mountainous areas and determine the suitability of re-
gions for forest tourism practices (Lee et al., 2019;
Hognogi et al., 2022). Viewshed computation is
also applicable in aquatic and marine systems (Arnon
et al., 2023; Qiang et al., 2019). Additionally, it can
predict the velocity expansion of sound waves or po-
tentially dangerous gases, aiding in decision-making
processes.
Despite the efficiency of viewshed analysis for a
single viewpoint, the processing time becomes signif-
icant when calculating multiple viewpoints, known as
total-viewshed computation. Moreover, the computa-
tion time increases dramatically with a growing max-
imum view distance or higher resolution. For many
applications, a large or nearly infinite view distance is
necessary.
In this paper, we focus on improving a total-
viewshed computation algorithm based on line of
sight (LoS). LoSs are used for simplification. To
speed up the viewshed computation on each LoS, we
introduce a novel approach. We estimate the FVP on
a
https://orcid.org/0000-0002-0560-2591
a LoS to abort the visibility computation earlier. An
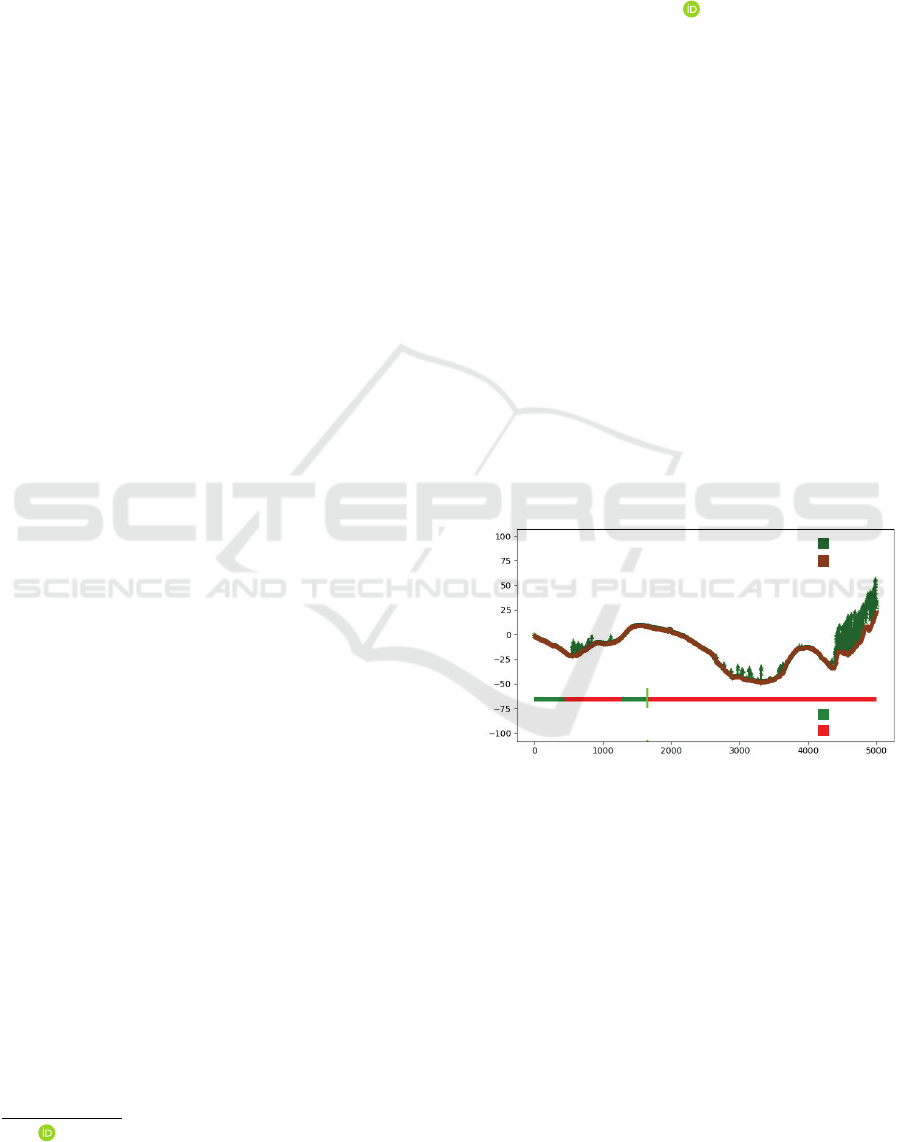
example of a LoS in profile view is shown in Figure
1.
Distance to the observer [m]
DSM
DTM
Visible
Invisible
Relative height to the observer [m]
FVP
Figure 1: This graph illustrates the visibility of a target
(1.9m high), placed on the DTM, from the observer’s per-
spective along the LoS. The brown line represents the DTM,
while the green areas indicate the DSM. The visibility is de-
picted through a straight line at the bottom: red indicates in-
visible segments, and green indicates visible segments. The
vertical bright green line marks the FVP that remains visi-
ble from the observer’s location.
Defining a hard cutoff criterion, such as rough-
ness, is challenging due to the variety of topogra-
phies. Although the computation of a single LoS re-
quires few operations, it is challenging to undercut
this for the cutoff criterion. Humans can intuitively
and quickly assess the necessary extent of viewshed
computations when examining terrain profiles, inspir-
ing the use of a neural network to estimate the FVP.
Schwencke, C., Stütz, D. and Bulatov, D.
AI-Accelerated Viewshed Computation for High-Resolution Elevation Models.
DOI: 10.5220/0013168400003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 251-258
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
251
Parallelizing the computation using multiple LoSs
makes fully connected networks promising for per-
formance enhancement. The output of the neural net-
work may either exceed or fall short of the true value
of the FVP. In the former case, unnecessary computa-
tion resources are used, but the result remains correct.
In the latter case, computation resources are saved at
the risk of errors.
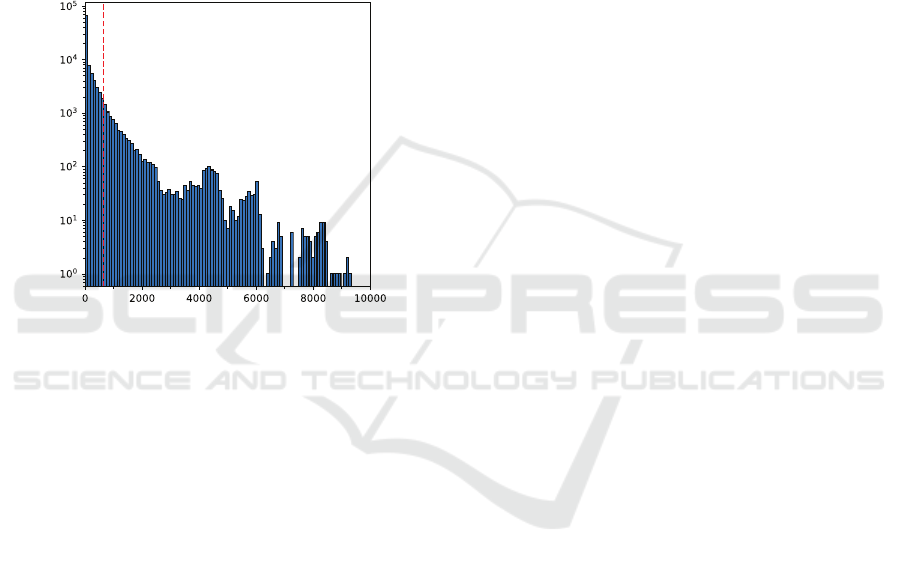
As illustrated in Figure 2, for 90% of the LoS, the
furthest visible point is within a distance of 1000m
towards the observer. Therefore, it is often unneces-
sary to calculate the entire LoS for a correct viewshed
result.
Distance to FVP [m]
Number of LoS
90% Percentile
Figure 2: Histogram over distances to the FVP on a LoS,
visible by an observer. The data samples were taken across
all datasets described in Section 4.
In Section 2, we provide a comprehensive
overview of related work to accelerate viewshed com-
putation. Our proposed method is introduced in Sec-
tion 3. We describe the datasets used, present the re-
sults, and draw the main conclusions in Sections 4, 5,
and 6, respectively.
2 RELATED WORK
This section provides an overview of notable methods
for total Viewshed computation and explores innova-
tive strategies for enhancing computational efficiency.
Within at least a quarter-of-century, the field of
Viewshed computation has been explored intensively
regarding increased efficiency. To begin with, (Stew-
art, 1998) proposed a fast algorithm for computing
the horizon at all sample points in a digital elevation
map, demonstrating improved accuracy and speed,
particularly for terrains with over 100 000 sample
points, making it suitable for visibility culling and
rendering. Building on this, (Tabik et al., 2013) in-
troduced a novel algorithm that computes the total-
viewshed for all points in a terrain simultaneously,
significantly outperforming traditional GIS viewshed
tools by combining visible heights and low-cost com-
putations. (Tabik et al., 2015)’s work emphasized effi-
ciency through effective data structures and high data
reuse across multiple viewpoints. Similarly, (Qarah,
2020) developed a parallel GPU algorithm utilizing
a radial-sweep approach, achieving remarkable speed
improvements over traditional CPU-based methods,
while (Pan et al., 2020) recommended the Matryoshka
doll algorithm to enhance computation efficiency in
viewshed analysis. Based on (Tabik et al., 2015),
(Sanchez-Fernandez et al., 2021) further contributed
to the field with their skewed digital elevation model
(sDEM), which improved memory access locality in
rotational sweep algorithms, demonstrating substan-
tial speedups compared to conventional GIS soft-
ware. The application of visibility-based path plan-
ning heuristics by (Sanchez-Fernandez et al., 2022)
showcased the potential of total-viewshed computa-
tion for maximizing visual coverage in UAV mon-
itoring tasks. (Heyns and Van Vuuren, 2013) fo-
cused on facility placement optimization based on
viewshed visibility percentages, proposing methods
to estimate viewshed efficiently with minimal accu-
racy loss. (Wang et al., 2023) introduced an inno-
vative algorithm that computes viewshed using ref-
erence planes, resulting in significant reductions in
computing time compared to traditional LoS based
methods. Recently, (Arnon et al., 2023) presented
ViewShedR, an open-source tool designed for cumu-
lative, subtractive, and elevated LoS analyses, facili-
tating accessibility for scholars in environmental and
ecological studies. (Parent and Lei-Parent, 2023) de-
veloped a 2D viewshed approach that utilizes land
cover to estimate visibility extents, proving effective
for large study areas where trees and buildings serve
as primary obstacles. Lastly, (Zhang et al., 2021) in-
troduced a Spark-based parallel computing approach
for the XDraw algorithm, significantly enhancing ef-
ficiency and scalability in Viewshed analysis for high-
resolution raster DSM.
Collectively, these contributions highlight the on-
going evolution and innovation in viewshed computa-
tion. We continue this by pursuing a novel approach
that significantly reduces the initial computation ef-
fort by intelligently estimating the FVP for the first
time.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
252

3 METHODOLOGY
This section outlines the methodology used to speed
up the viewshed computation using neural networks.
We begin with an overview of the conventional
method, followed by the introduction of an AI-based
approach. Detailed descriptions of the network archi-
tecture, training data, and the loss function are pro-
vided subsequently.
3.1 Preliminaries
A viewshed computation method described by
(H
¨
aufel et al., 2023) use LoS. Key terms of this
method are described in Figure 3. This method cal-
culates the viewshed of a target (t) from an observer
(o) as:
z
o
:= DTM(o) + h
o
(1)
z
t
:= DTM(t) + h
t
(2)
where h
o
is the observer and h
t
the target height. To
calculate the viewshed of a target on the LoS, the
maximum slope variable S
∗
is initialized to −∞. On
the LoS, the distance from the target towards the ob-
server ρ = [1, .., D] is defined, where ρ
t
is the distance
to the target and D the maximum visibility distance.
The current LoS slope S is computed for every target
position as:
S := max
z
t
− z
o
ρ
t
,
DSM(t) − z
o
ρ
t
(3)
The boolean visibility on the LoS v
ρ
and the maxi-
mum slope S
∗
are updated according to:
If S > S
∗
: v
ρ
:= 1 and S
∗
:= S else v
ρ
:= 0. (4)
3.2 Viewshed-AI Architecture
Human intuition allows a quick estimation of the
FVP in terrain profiles, which is in most cases much
smaller than D. Inspired by this, we propose using
a neural network to estimate the FVP and relinquish
the viewshed computation on the LoS much further
afar, whereby “much´´ means a safety margin to be
imposed is recommendable, as we will see later. In ei-
ther way, doing so would massively reduce the com-
putation expense while maintaining accuracy, espe-
cially when parallelized over multiple LoSs.
The procedure is schematically explained in Fig-
ure 4 with hypothetical numerical in- and outputs. We
employ a fully connected neural network, consisting
of an input layer, hidden layers with ReLU activation
functions, and dropout layers. The input layer gets the
concatenated profiles of the normalized digital sur-
face model (nDSM) and the DTM. Additionally, the
Observer
Target
LoS
LoS
DSM
DTM
V
i
e
w
s
h
e
d
DTM
Bird's Eye View
Prole view
Observer
Visibility
FVP
Figure 3: Key terms related to viewshed computation using
LoS. It depicts the observer’s location, the target being eval-
uated, and the LoS that indicate visibility. The DSM and
DTM are essential for determining visibility. The viewshed
represents the area visible from the observer’s point. The
figure includes both a bird’s eye view, showcasing the ter-
rain and visibility relationships from above, and a profile
view, illustrating elevation changes and sight lines. Green
and Red colors along the LoS marks areas where the orange
target is (in-) visible from the observer.
target height value is appended. The network’s final
layer outputs the predicted FVP.
Distance
to FVP
521
m
nDSM
DTM
Target
height
1.8
Neural
Network
Figure 4: The process for estimating the FVP. The input
data in the gray box consists of a nDSM, a DTM adjusted
for observer height, and the target height. A neural network
processes this information to determine the FVP. The nu-
meric values shown are illustrative examples.
The number of neurons in hidden layers and
dropout rates can be adjusted to the problem. This
network reliably learns relationships within a vector
and has a very short evaluation time. The architecture
is chosen to balance evaluation time and accuracy, ini-
tially focusing on feed-forward networks.
3.3 Training Data
Training data is created by selecting random strips
of length l from our DTMs and the corresponding
DSMs. Each strip includes an observer and target
height chosen in range 0.5 m to 4.0 m.
The network’s input layer receives a vector con-
taining the DTM, nDSM, and target height. The input
AI-Accelerated Viewshed Computation for High-Resolution Elevation Models
253

vector is structured as.
[ DTM | nDSM | Target Height ] .
with an input dimension of D = 2l + 1. Hereby, the
nDSM denotes normalized DSM, which is the eleva-
tion over the ground, or the difference between DSM
and DTM. Furthermore, the DTM and nDSM are sub-
tracted towards the absolute observer height to make
their values relative towards him.
The training dataset contains the input vector, vis-
ibility at each point, and the calculated FVP, see Fig-
ure 3. The FVP is generated by determining the slope
between z
o
and z
s
and comparing it with the maxi-
mum slope from previous points.
3.4 Loss Function
The loss function influences the network’s training by
weighting errors.
Underestimating ρ
∗
should be penalized much
more than overestimating this variable. The latter
would result in the necessity of making more com-
putations during viewshed computation, which is a
smaller threat than the former, that is, overlooking po-
tentially visible points, because it may signify a par-
ticular value or alarm. Our function should be some-
how skewed towards positive differences between ac-
tual and predicted values of ρ
∗
.
Another way to encourage rather farther visibility
is to impose scale invariance and proportional error
measurement. To this end, we based our function on
the Huber loss, which is quadratic for small and linear
for large deviations between actual and predicted val-
ues. Our modified Huber loss L : N × N × {0, 1}
l
→
R
≥0
with user-specified parameters β, γ, and δ is de-
fined by Equation (5).
L(x, ρ
∗
, v) =
δ
L
ρ
−
1
2
δ
if δ < L
ρ
,
1
2
L
2
ρ
if 0 ≤ L
ρ
≤ δ,
1
2
βŁ
2
ρ
+ γL
v
if − δ ≤ −L
ρ
< 0,
δβ
−L
ρ
−
1
2
δ
+ γL
v
otherwise,
where L
ρ
= x − ρ
∗
and L
v
=
ρ
∗
∑
i=x
+
+1
v
i
.
(5)
In this loss function, x is the FVP generated by the
network, ρ
∗
is the actual FVP, v indicates visibility
at each point (1 is visible, 0 is invisible), and x
+
=
max(x, 0). The vector v is hereafter called truth vec-
tor. The parameter β weights the loss for x − ρ
∗
< 0,
δ controls the interval for quadratic deviations, and γ
adds a penalty for unconsidered visibility.
The choice of β, δ, and γ influences the balance
between computation time and error minimization.
An optimal set of parameters minimizes early FVP
errors while maximizing computation efficiency. We
will turn to this issue during the ablation study. How-
ever, in short, δ is the trade-off between linear and
quadratic error, typical for the Huber function, β is the
skewing parameter for negative x − ρ
∗
, and γ allows
taking into account the number of points for which
visibility was incorrectly predicted.
4 DATASETS
The proposed method can be trained and tested for
any dataset for which DSM and DTM are available.
Of course, the more diverse datasets exist, the more
generalized the output model is. We considered three
datasets from our repository, which cover a range
from very flat to hilly terrain. They originate from
three European regions: Karsava in Eastern Latvia,
Altm
¨
ulltal is in Bavaria in Southern Germany, and
Wetter is in the province of Hesse in Central Germany.
Latvian dataset is quite flat and has quite many forest
regions. Bavaria is a bit hilly, and Hesse even more
so. The dataset from Bavaria, also referred to as Gred-
ing, was used by other scientific publications, such as
(Kuester et al., 2021). Key parameters for describing
the terrain of the three datasets can be seen in Figure
5. The resulting dataset contains an equal amount of
every region, which can ensure a sufficient diversity
in the data.
The considered height profiles start at arbitrary
points in the dataset and extend in arbitrary directions,
each measuring a length of 10000m. Through sam-
pling in different directions, the variety can be further
increased. Some 10% of them were used for training
and the rest validating the algorithm.
Absolute DTM dierence [m]
Median nDSM height [m]
Median DTM slope [°]
Median DSM roughness
Latvia Bavaria Hesse
Figure 5: Parameters of considered datasets.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
254

5 RESULTS
To assess the performance of the network, we
straightforwardly measure the absolute error between
the predicted and actual FVP. Besides, we want to
track the relative performance accuracy ε of the truth
vector v, using the same notation as in (5):
ε = 1 −
1
l
ρ
∗
∑
i=x
+
+1
v
i
, (6)
with l describing the length of the LoS. The reason to
take it into consideration lies in the later application.
The higher number of visible points after the gener-
ated stop leads to a higher error. If the ρ
∗
leads to an
early stop with only a few visible points much further
along the LoS, the saved time could be more benefi-
cial.
With these considerations in mind, we will discuss
network designs, qualitative and quantitative findings,
as well as a comparison with the conventional View-
shed Algorithm, optionally accelerated with a max-
slope criterion, in the remainder of this section.
5.1 Ablation Study
In this section, we will consider a few network de-
signs and provide experiments with different network
parameters. We chose four networks with different
amounts of layers and neurons because we aim for a
fast inference method, whilst maintaining a high ac-
curacy.
Table 1: Number of neurons in reviewed network architec-
tures with parameters (β, γ, δ) = (2, 100, 500).
Layer-Number →
Network-ID ↓ 1 2 3 4
1 2048 1024 512 —
2 1024 512 256 —
3 2048 1024 512 256
4 1024 512 256 128
As can be seen in Figure 6a, all four networks
produce similar results; networks with three layers
overshoot more than those with four. Otherwise, hav-
ing 2048 neurons in the first hidden layer results in
a lower deviation of absolute errors. This behavior is
desired; nevertheless, a higher number of neurons and
layers leads to a longer evaluation time. A suitable
network has to be chosen according to the specifics of
the application. While experimenting with different
parameters, some tendencies could be derived. In-
creasing the value of β results in a higher deviation
of the errors, while shifting the mean upwards. This
behavior should be expected, as the network tends to
overestimate the FVP value due to the composition of
the loss function. Adjusting the parameters γ or δ does
not change the outcome as much as expected. A cor-
relation between those parameters needs to be further
investigated. Overall, it is not possible to come to a
final conclusion because the mutual dependencies of
the parameters have proven to be relatively complex.
Error [m]
Relative accuracy
Network Network
(a)
Error [m]
Relative accuracy
Latvia Bavaria Hesse Latvia Bavaria Hesse
(b)
Figure 6: Box plots of errors and accuracy ε for the net-
works mentioned in Table 1 (a) and for the different regions
(b). The black lines indicate the quantile deviation between
the 5% and the 95% quantile. The gray box depicts the in-
terquartile range, and the green line shows the median. The
red dots represent the empirical mean.
5.2 Qualitative Evaluation
The results discussed from now on were generated
with network-ID 3 from Table 1. This network rep-
resents a suitable choice according to the hyperpa-
rameter optimization framework Optuna (Akiba et al.,
2019). Afterward, the network design has been
slightly modified based on empirical observations. In
Figure 7, we can observe six examples (at the top)
in which the network predicts the FVP with an ex-
tremely high accuracy, while three examples on the
bottom exhibit different kinds of deviations. In the
successful examples of the FVP retrieval, the second
row shows a few challenging situations. It can be ob-
served that despite some FVPs being far away or not
on top of a hill, the network predicts the FVP with a
high accuracy. The least pleasant for our application
errors of too early FVPs happen occasionally close
to the forests, although there are some vertical slopes
further away. The most FVP errors of our applica-
AI-Accelerated Viewshed Computation for High-Resolution Elevation Models
255
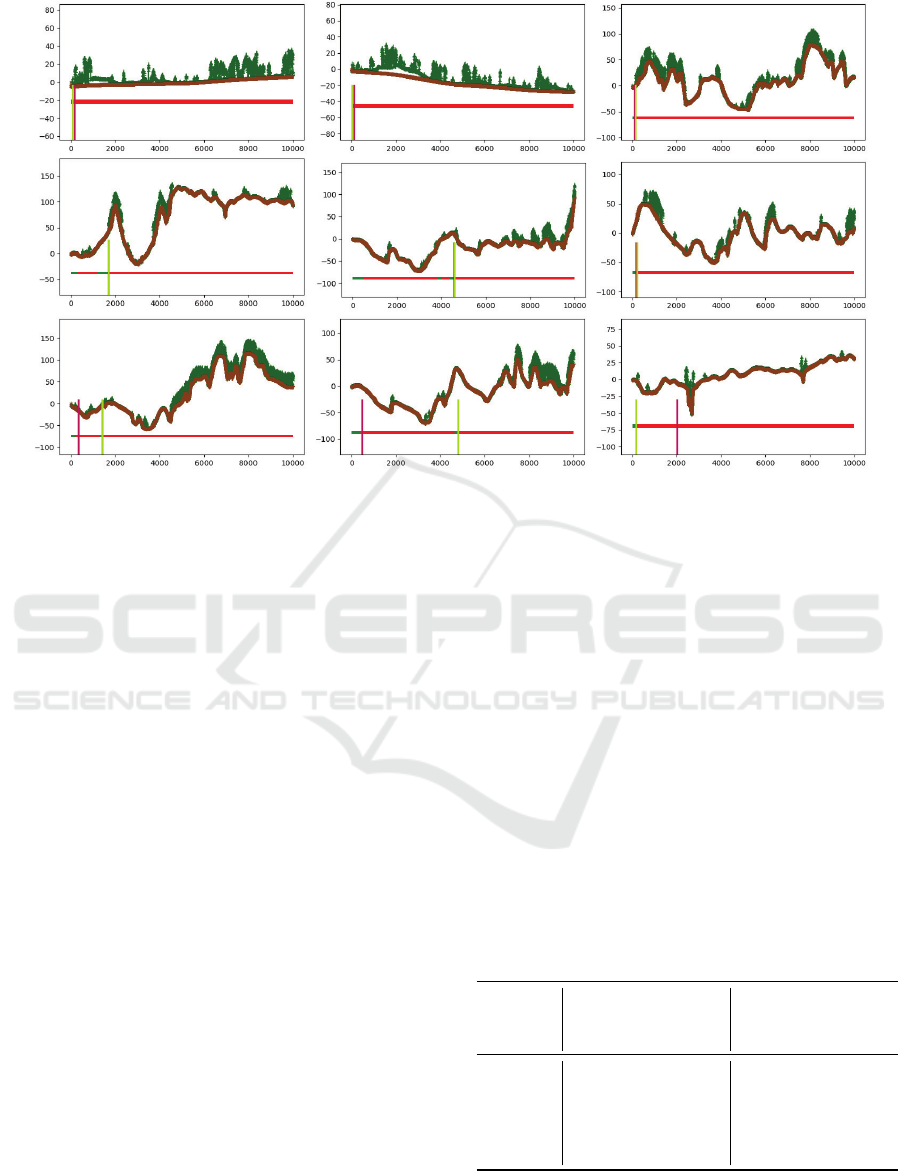
Figure 7: Examples of six correctly predicted FVPs (accuracy ε over 99%, top two rows) and two incorrectly predicted FVPs
(bottom rows, accuracy ε below 90%). Vertical green and purple bars indicate the actual and predicted points The elevation
profiles in the DSM and DTM are shown in green and brown. Observed and non-observed points are represented by green
and red fragments, respectively, in the horizontal line below.
tion occur occasionally near forests, although there
are some vertical slopes further away. Fortunately, in
the majority of these cases, only a few actually visible
points are missed.
5.3 Quantitative Assessment
In this section, we discuss the accuracy produced by
the aforementioned network. From Figure 2 it be-
comes clear that in the elevation profiles along the
10000m, some 90% of the deviations constitute less
than 250m. The accuracy of the truth vector exceeds
97% for 95% of the test data. Our network is able
to estimate the approximate position of the FVP. It is
also not critical to achieve a slightly too early FVP be-
cause a safety margin of around 250m, barely notice-
able in the application of the method in Section 3.1,
can be added. The accuracy of our network is ±250m,
which might seem modest but represents only 2% of
the total visibility range of 10000m. By adding this
2% as a safety margin, we achieve no errors in 90% of
the cases. Unfortunately, the errors are unevenly dis-
tributed in three different regions, as becomes evident
from Figure 6b. In Latvia, the results are much more
accurate than in Bavaria. This indicates that the net-
work produces better outputs for flatter regions. Per-
formance of the method in very mountainous regions
is yet to be tested.
5.4 Comparison with Max-Slope
Criterion in Terms of Time and
Accuracy
Table 2 represents the percentage of needed computa-
tions compared to an implementation with no abort
condition, along with the achieved accuracy. For
comparison, two other abort criteria are displayed.
Those abort the computation if the regarded view an-
gle between the observer height and a point on the
DSM exceeds a certain threshold. The network is dis-
played with different safety margins.
Table 2: Percentage of computations needed using different
FVP criteria, compared to no FVP criterion for Latvia (L),
Bavaria (B), and Hesse (H). We denote in the left-most col-
umn network 3 from Table 1 by N3.
FVP- Computations mean Accuracy
crit. ↓ [%] [%]
Region → L B H L B H
1
◦
7.82 19.53 11.48 99.99 99.82 99.80
15
◦
38.65 53.98 46.68 99.99 99.99 99.99
N3 1.02 4.00 5.30 99.69 99.51 99.75
N3[+250] 3.42 6.40 7.7 99.90 99.82 99.91
N3[+500] 5.92 8.90 10.20 99.96 99.91 99.95
Using the network-generated FVP for aborting re-
duces the amount of computations quite significantly.
Implementing a simple criterion like an angle-based
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
256

abort condition is a much simpler strategy and can
also reduce the number of computations. Although
the angle-based criteria with a 15
◦
condition lead to
a near-perfect accuracy, it may fail depending on the
terrain regarded. We can see that Karsava in Latvia
has so many trees and so many quite short values for
FVP, that the simple strategy to abort as soon as 1
◦
slope is achieved is very difficult to beat in terms of
accuracy. A high deviation of absolute errors, seen in
Figure 6b, leads to a significantly higher percentage
of needed computations. But also for other regions,
the 1
◦
max slope criterion can only be outperformed
only by means of a safety margin, and at a cost of
necessary computations. However, in Table 2, we dis-
played the mean values, which are susceptible for the
outliers. Taking into account the 5% quantile, the 1
◦
criterion achieves 0.99 for Latvia, but 0.98 for Bavaria
and Hesse. The network with a safety margin of 250
achieves 1 for Latvia and Hesse and 0.99 for Bavaria.
This is why the apparently good performance of the
simple max slope criterion is misleading.
Overall, the computing time is hardware- and
implementation-dependent. With an Intel
®
Xeon
®
Gold 6154 CPU, the time needed to infer the FVP for
one LoS is approximately 0.03ms, when the input-
data contains 10000 LoSs.
6 CONCLUSION
In this paper, we presented a novel approach to accel-
erate the viewshed computation. For each LoS, the
FVP is estimated, after which the viewshed compu-
tation is aborted. Before the FVP the viewshed com-
putation is exactly as before. Ideally, this results in
no loss of accuracy compared to traditional methods.
Since the distance towards the FVP is significantly
smaller than the desired maximum visibility distance,
in most cases substantial speed gains can be achieved.
We achieve an accuracy of ±250m. Our test data
shows that we could save more than 90% of the com-
putations, whilst maintaining a high accuracy when
dealing with large viewshed distances or high resolu-
tion datasets. This efficiency cannot be achieved by
traditional LoS algorithms and even with the simple
1
◦
criterion, we achieved much less points to be tested
with comparable accuracy.
As this is our initial study with this approach, we
are confident that further improvements in accuracy
and speed are achievable. There are many possibil-
ities within network architecture, making it unlikely
that we have found the optimal solution in the first
attempt.
In future studies, we aim to enhance performance
through skip connections or parallel network architec-
tures. Additionally, we plan to investigate the aptitude
of convolutional neural networks. Deeper networks
are not currently planned due to performance consid-
erations.
ACKNOWLEDGEMENTS
Freely available AI-based text generation techniques
helped summarize Section 2. The sources were se-
lected by the authors who also carefully double-
checked the resulting text. We also thank the review-
ers for their insightful comments.
REFERENCES
Akiba, T., Sano, S., Yanase, T., Ohta, T., and Koyama, M.
(2019). Optuna: A next-generation hyperparameter
optimization framework. In Proceedings of the 25th
ACM SIGKDD International Conference on Knowl-
edge Discovery and Data Mining.
Arnon, E., Uzan, A., Handel, M., Cain, S., Toledo, S.,
and Spiegel, O. (2023). Viewshedr: a new open-
source tool for cumulative, subtractive and elevated
line-of-sight analysis. Royal Society Open Science,
10(6):221333.
H
¨
aufel, G., Bulatov, D., Emter, T., Frese, C., Kottler, B.,
Petereit, J., Schmidt, A., Solbrig, P., St
¨
utz, D., and
Wernerus, P. (2023). Ghost: Getting invisibly from
position A to position B. In Emerging Imaging and
Sensing Technologies for Security and Defence VIII,
volume 12740, pages 32–43. SPIE.
Heyns, A. and Van Vuuren, J. (2013). Terrain visibility-
dependent facility location through fast dynamic step-
distance viewshed estimation within a raster environ-
ment. In Proceedings of the Conference of the Oper-
ations Research Society of South Africa, pages 112–
121. Operations Research Society of South Africa.
Hognogi, G.-G., Pop, A.-M., M
˘
al
˘
aescu, S., and Nistor, M.-
M. (2022). Increasing territorial planning activities
through viewshed analysis. Geocarto International,
37(2):627–637.
Kuester, J., Gross, W., and Middelmann, W. (2021). 1D-
convolutional autoencoder based hyperspectral data
compression. The International Archives of the Pho-
togrammetry, Remote Sensing and Spatial Informa-
tion Sciences, 43:15–21.
Lee, K. Y., Seo, J. I., Kim, K.-N., Lee, Y., Kweon, H.,
and Kim, J. (2019). Application of viewshed and spa-
tial aesthetic analyses to forest practices for mountain
scenery improvement in the Republic of Korea. Sus-
tainability, 11(9):2687.
Pan, Z., Tang, J., Tjahjadi, T., Wu, Z., and Xiao, X.
(2020). A novel rapid method for viewshed com-
putation on dem through max-pooling and min-
AI-Accelerated Viewshed Computation for High-Resolution Elevation Models
257

expected height. ISPRS International Journal of Geo-
Information, 9(11):633.
Parent, J. R. and Lei-Parent, Q. (2023). Rapid viewshed
analyses: A case study with visibilities limited by
trees and buildings. Applied Geography, 154:102942.
Qarah, F. F. (2020). Efficient viewshed computation algo-
rithms on GPUs and CPUs. PhD Thesis at the Uni-
versity of South Florida.
Qiang, Y., Shen, S., and Chen, Q. (2019). Visibility analysis
of oceanic blue space using digital elevation models.
Landscape and Urban Planning, 181:92–102.
Sanchez-Fernandez, A. J., Romero, L. F., Bandera, G.,
and Tabik, S. (2021). A data relocation approach
for terrain surface analysis on multi-gpu systems: a
case study on the total viewshed problem. Interna-
tional Journal of Geographical Information Science,
35(8):1500–1520.
Sanchez-Fernandez, A. J., Romero, L. F., Bandera, G., and
Tabik, S. (2022). Vpp: Visibility-based path planning
heuristic for monitoring large regions of complex ter-
rain using a uav onboard camera. IEEE Journal of Se-
lected Topics in Applied Earth Observations and Re-
mote Sensing, 15:944–955.
Stewart, A. J. (1998). Fast horizon computation at all
points of a terrain with visibility and shading applica-
tions. IEEE Transactions on Visualization and Com-
puter Graphics, 4(1):82–93.
Tabik, S., Cervilla, A. R., Zapata, E., and Romero, L. F.
(2015). Efficient data structure and highly scalable al-
gorithm for total-viewshed computation. IEEE Jour-
nal of Selected Topics in Applied Earth Observations
and Remote Sensing, 8(1):304–310.
Tabik, S., Zapata, E., and Romero, L. (2013). Simultane-
ous computation of total viewshed on large high res-
olution grids. International Journal of Geographical
Information Science, 27(4):804–814.
Wang, Z., Xiong, L., Guo, Z., Zhang, W., and Tang, G.
(2023). A view-tree method to compute viewsheds
from digital elevation models. International Journal
of Geographical Information Science, 37(1):68–87.
Zhang, J., Zhao, S., and Ye, Z. (2021). Spark-Enabled
XDraw viewshed analysis. IEEE Journal of Selected
Topics in Applied Earth Observations and Remote
Sensing, 14:2017–2029.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
258
