
Knowledge Amalgamation for Single-Shot Context-Aware Emotion
Recognition
Tristan Cladi
`
ere, Olivier Alata, Christophe Ducottet, Hubert Konik and Anne-Claire Legrand
Universit
´
e Jean Monnet Saint-Etienne, CNRS, Institut d’Optique Graduate School, Laboratoire Hubert Curien UMR 5516,
F-42023, Saint-Etienne, France
{tristan.cladiere, olivier.alata}@univ-st-etienne.fr
Keywords:
Emotion Recognition, People Detection, Context, Amalgamation, Multiple Teachers.
Abstract:
Fine-grained emotion recognition using the whole context inside images is a challenging task. Usually, the
approaches to solve this problem analyze the scene from different aspects, for example people, place, object or
interactions, and make a final prediction that takes all this information into account. Despite giving promising
results, this requires specialized pre-trained models, and multiple pre-processing steps, which inevitably results
in long and complex frameworks. To obtain a more practicable solution that would work in real time scenario
with limited resources, we propose a method inspired by the amalgamation process to incorporate specialized
knowledge from multiple teachers inside a student composed of a single architecture. Moreover, the student
is not only capable of treating all subjects simultaneously by creating emotion maps, but also to detect the
subjects in a bottom-up manner. We also compare our approach with the traditional method of fine-tuning
pre-trained models, and show its superiority on two databases used in the context-aware emotion recognition
field.
1 INTRODUCTION
Even as human beings, it is not always trivial to as-
sess someone’s emotions. In real world situations,
useful visual cues for inferring emotions not only in-
clude facial expressions (Li and Deng, 2020), but also
diverse information relative to the context, such as hu-
man appearance and pose, objects interacting with the
subject and more generally the global context of the
scene (Barrett et al., 2011). This problem has been
recently addressed as Context-Aware Emotion Recog-
nition (CAER).
Recent architectures designed for CAER address
the challenge posed by the diverse and distinct na-
ture of contextual elements. These architectures typi-
cally adopt a multiple-stream network, made of var-
ious encoding modules to extract specific features
from the input image, as illustrated by Figure 1. The
subsequent fusion module and classification head are
then employed to predict the emotion of the main
subject. For instance, in (Lee et al., 2019), the
face-centric stream is supplied with a cropped image
of the face, while the global context stream is fed
with the entire image, excluding the face which has
been intentionally concealed. Similarly, (Kosti et al.,
2019) and (Bendjoudi et al., 2021) both proposed a
two-stream architecture to extract person-related and
scene-related features. In (Zhang et al., 2019), one of
the streams is made of a graph convolutional network
that uses the features generated by a region proposal
network as nodes. This multi-stream methodology of-
ten relies on off-the-shelf modules for pre-processing,
as illustrated by (Mittal et al., 2020), who proposed
a three-stream architecture. In their approach, the
person-centric stream is made of two sub-streams uti-
lizing OpenPose and OpenFace models, while the
inter-agent stream incorporates the Megadepth model
to extract a depth map. The authors in (Wang et al.,
2022) introduced the tubal transformer, a shared fea-
tures representation space that facilitates the interac-
tions among the face, body, and context features, but
this requires to use Retinaface first. The reasoning
stream in (Hoang et al., 2021) that explores relation-
ships between the main subject and the adjacent ob-
jects in the scene relies on FasterRCNN to generate
their inputs. This is also the case for one of the seven
streams in (Yang et al., 2022) that are merged using an
adaptive relevance fusion module. A brief summary
of these approaches is provided in Table 1, along with
an overview of their performance on EMOTIC (Kosti
et al., 2017; Kosti et al., 2019), a widely used dataset
in CAER.
410
Cladière, T., Alata, O., Ducottet, C., Konik, H. and Legrand, A.-C.
Knowledge Amalgamation for Single-Shot Context-Aware Emotion Recognition.
DOI: 10.5220/0013169800003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
410-419
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
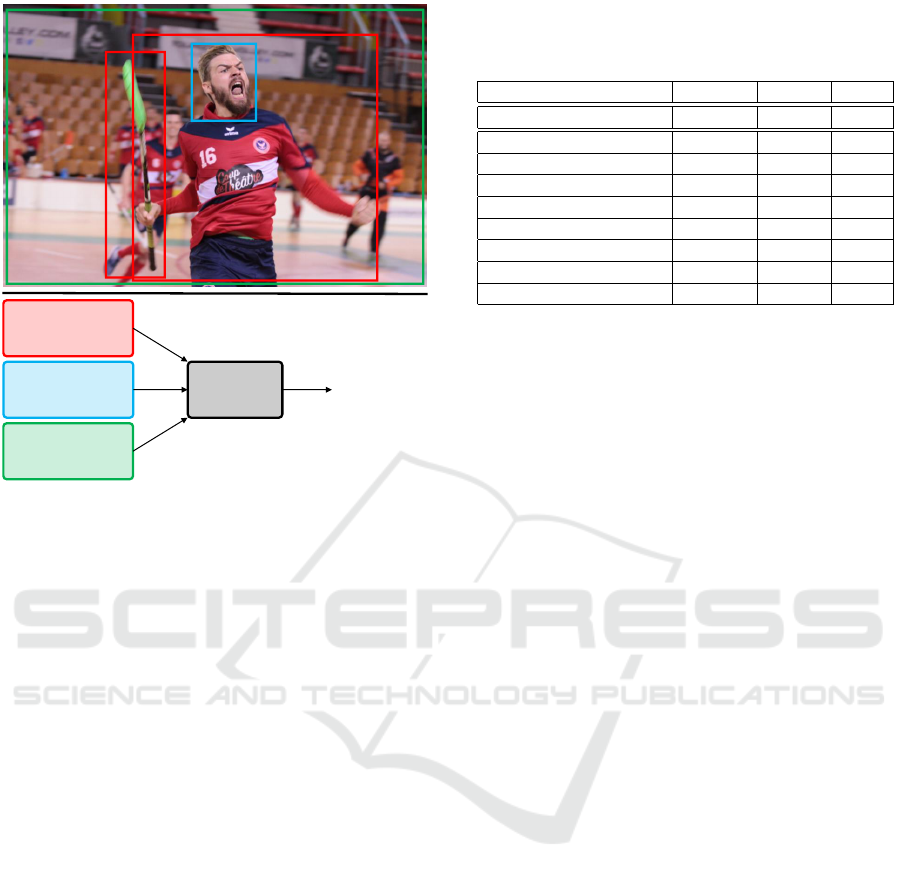
Objects/People
Facial
expression
Scene
Fusion
Module
Emotion
prediction
Figure 1: Illustration of the current trend followed by
CAER approaches, where multiple specialized streams
are used to extract complementary cues, finally combined
through fusion modules to obtain a refined prediction.
Online training and implementation of such mod-
els present complexity primarily due to the need for
seamless integration of all external modules into the
overall architecture. An other important point is that
these models inherently follow a top-down approach,
where each individual in the scene must be detected
and processed separately as the primary actor, while
other elements within the scene are treated as contex-
tual background. As a result, processing a single im-
age necessitates multiple inferences, equivalent to the
number of subjects present in the scene. It is worth
noting that the task of individually detecting each ac-
tor is not included within the architecture itself but is
instead provided by the ground truth of the dataset,
following standard single task evaluation benchmarks
in CAER.
The development of online approaches suitable
for real-time applications with limited resources
poses various challenges. Firstly, it needs to address
the emotion recognition task in a bottom-up manner,
i.e. capable of simultaneously estimating the emo-
tion of all subjects within an image. Secondly, it
must seamlessly integrate a single-shot person de-
tection module to process all the actors in the scene
simultaneously. Thirdly, it must depend on a con-
strained number of feature extraction backbones to
enable end-to-end training and minimize the required
resources for implementation. A promising architec-
Table 1: Mean Average Precision (mAP) obtained on
EMOTIC dataset (Kosti et al., 2017; Kosti et al., 2019) by
state-of-the-art methods. NERR: Number of External Re-
sources Required (off-the-shelf models).
Authors Streams NERR mAP
Us 1 0 27.10
(Lee et al., 2019) 2 1 20.84
(Kosti et al., 2019) 2 0 27.38
(Bendjoudi et al., 2021) 2 0 28.33
(Zhang et al., 2019) 2 1 28.42
(Wang et al., 2022) 3 1 30.17
(Hoang et al., 2021) 6 2 35.16
(Mittal et al., 2020) 4 3 35.48
(Yang et al., 2022) 7 3 37.73
ture of this nature was introduced by (Cladi
`
ere et al.,
2023); however, the training procedure remains intri-
cate and suffers from the limited amount of available
data in CAER to efficiently train both the person de-
tection and emotion recognition tasks.
In this paper, we propose to introduce the tech-
nique of knowledge amalgamation for training a
single-shot CAER architecture, employing multiple
pre-trained teachers specialized in various sub-tasks
related to scene context analysis. This not only
streamlines the training process through the use of ex-
isting off-the-shelf pre-trained architectures but also
provides a simple yet effective single stream approach
to learn the diverse visual features needed for a com-
prehensive understanding of the scene, leveraging
task-oriented external datasets. To the best of our
knowledge, this is the first attempt to use knowledge
amalgamation in the CAER context, since it has only
been tested on image classification in the literature.
Indeed, (Luo et al., 2019) worked on the amalgama-
tion of heterogeneous-architecture teacher models by
learning a common feature space, wherein the student
model imitates the projected features of the teach-
ers. A comparable approach is developed by (de Car-
valho et al., 2022) to limit the catastrophic forgetting
problem in a class-incremental learning framework.
(Ye et al., 2019) proposed a branching out method to
only amalgamate the filtered knowledge from a pool
of teachers to the student model. The approach pro-
posed by (Shen et al., 2019a) is to concatenate and
then compress features from multiple teachers, thus
creating examples that the student model has to re-
produce. Finally, (Shen et al., 2019b) introduced a
selective learning scheme to select the best teachers
among many, and a transfer bridge to align the fea-
tures of the student and those of the teachers.
Our contributions encompass three key aspects.
Firstly, we proposed a bottom-up model capable of
simultaneously estimating the emotion of all subjects
within an image. Secondly, we introduced a novel
Knowledge Amalgamation for Single-Shot Context-Aware Emotion Recognition
411
BACKBONE
EMOTION
HEAD
BACKBONE
BACKBONE
DETECTION
HEAD
COMMON FEATURE SPACE
STUDENT
TEACHER 1
TASK
1
HEAD
TEACHER N
TASK
N
HEAD
(a)
(b)
Align T1
Align TN
Shared Align
Concatenate
Decoder T1 Decoder TN
𝐹
𝑠
𝐹
𝑇
1
𝐹
𝑇
𝑁
Split
መ
𝑓
𝑠
መ
𝑓
𝑇
1
𝑅
መ
𝑓
𝑇
𝑁
𝑅
መ
𝑓
𝑇
መ
𝑓
𝑇
1
𝑅
መ
𝑓
𝑇
𝑁
𝑅
𝐹
𝑇
1
𝐹
𝑇
𝑁
𝐹
𝑇
1
𝐹
𝑇
𝑁
Feature Loss
Reconstruction Loss
Align S
Shared Encoder
Projection
Reconstruction
𝐹
𝑠
𝐹
𝑇
1
𝐹
𝑇
𝑁
መ
𝑓
𝑠
መ
𝑓
𝑇
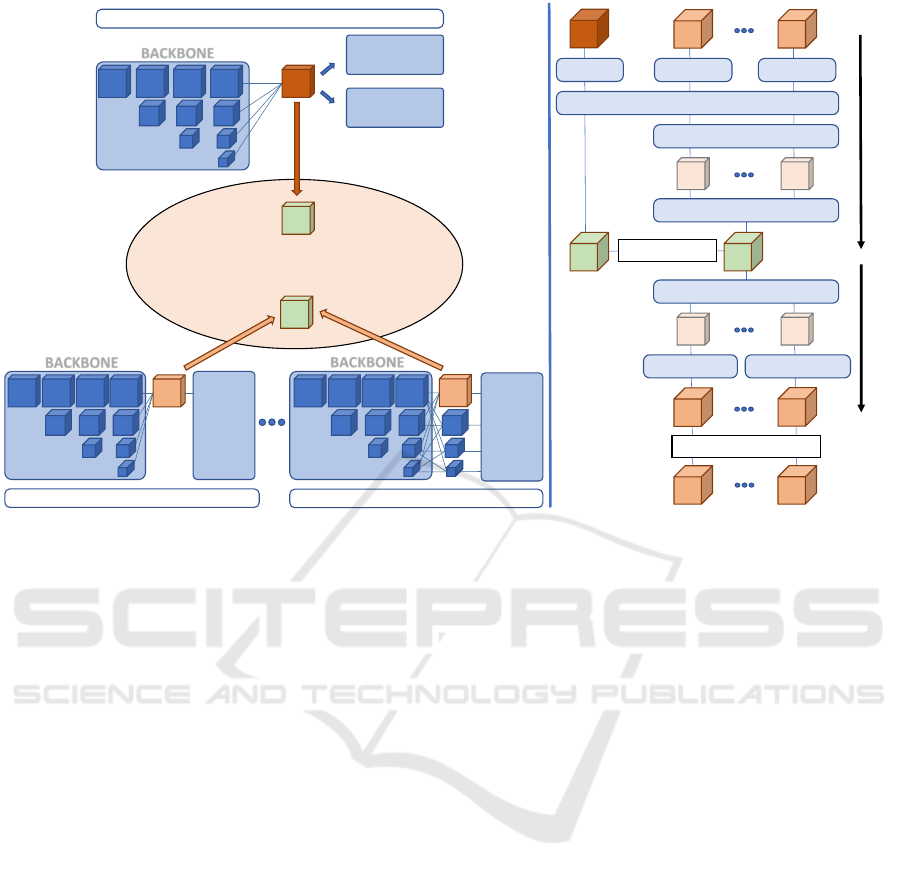
Figure 2: (a) Overview of the proposed approach. The student model is composed of a single backbone shared by two
bottom-up heads, one for emotion recognition, the other for person detection. Given several teachers that may have different
heads (depending on their specialization) but the same backbone, we want the student to reproduce their features. Therefore,
both teachers and student features are projected into a common space, where the student learns to reproduce a merged version
of the teachers’ features. (b) Summary of the operations used to project the features into the common feature space and to
reconstruct them.
knowledge amalgamation process, leveraging multi-
ple pre-trained teachers, each specialized in specific
sub-tasks. Thirdly, we integrated a person detection
module to process all actors in a scene in a single shot.
We then conducted a performance comparison be-
tween our amalgamation approach and a comparable
architecture trained with fine-tuning on two CAER
databases, evaluating both single-task and multi-task
configurations.
2 METHOD
In order to reduce the complexity of our CAER frame-
work, and to explore the capacities of a lightweight
solution, we decided to follow the work of (Cladi
`
ere
et al., 2023). Indeed, instead of using multiple spe-
cialized streams, we prefer to have a condensed,
single-stream architecture that is able to extract rich
features, carrying both subject-related and context-
related information. To ensure the “quality” of
these features, the student model learns to reproduce
the examples provided by one or multiple teachers,
through the proposed amalgamation process. Then,
our bottom-up approach allows to handle all the sub-
jects in an image simultaneously with the generation
of emotion maps, where the activated areas indicate
the presence of a given emotion. Although poorly ex-
plored in CAER research, such bottom-up method of-
fers faster treatment compared to the widely used top-
down approaches that require treating each person se-
quentially. Finally, it is also possible to integrate the
person detection task to extract the individual emotion
predictions from emotion maps by simply connecting
a specialized head to the backbone of the architecture,
thus offering a ready-to-use solution without signifi-
cantly increasing the model size. The Figure 2 sum-
marizes our method.
2.1 Emotion Maps
To generate emotion maps (see Figure 3), we use a
bottom-up head inspired by bottom-up architectures
used for body pose estimation, such as HigherHRNet
(Cheng et al., 2020). Ours is composed of 4 residual
blocks, followed by one 2−dimensional convolution
with a kernel of size 3 × 3 and a padding of size 1, a
batch normalization, a ReLu activation function, and
a final 2−dimensional convolution with a kernel of
size 1 × 1 to obtain the desired number E of maps.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
412

HECO_4092.png
Happiness
Peace
Anger
HECO_3517.png
Exc itement
Peace Surprise
Figure 3: Examples of emotion maps. A softmax function
has been applied across the maps for better visualisation.
The value of E depends on the number of discrete
emotion categories used in the considered database.
On these maps, we want the mean value of the pix-
els contained inside each subject’s bounding box to
be equal to 1 if the emotion is present, 0 otherwise.
In other words, if a subject is labeled with a certain
emotion, the pixels at its position in the correspond-
ing emotion map must be globally activated. How-
ever, the value of the other pixels is not imposed, leav-
ing the model free to activate them or not if this can
help it make correct predictions. We have found em-
pirically that this produces better results than forcing
the background pixels to be 0. Finally, for training
and testing our approach, we therefore need to use the
annotated bounding boxes to extract the predictions
from the emotion maps.
2.2 Detection Head
A limitation of using emotion maps is that we need
to rely on the detection of the subjects to extract our
predictions. For real inferences on the field, where
there is no annotations, we thus need to use a person
detector. We made the choice to directly incorporate
it inside our architecture by adding another head.
Similar to (Zhou et al., 2019), this bottom-up de-
tection head is trained to predict the center of the
bounding boxes by creating a heatmap, and to regress
their dimensions by outputting two other maps, one
for their height, the other for their width. It is com-
posed of 4 residual blocks, followed by two modules,
both made of a 2−dimensional convolution with a
kernel of size 3 × 3 and a padding of size 1, a batch
normalisation, a ReLu activation function, and a fi-
nal 2−dimensional convolution with a kernel of size
1 ×1 to obtain either 1 heatmap or 2 regression maps.
Actually, this head is very similar to the one we use
for creating emotion maps.
It is during a post-processing step that the local
maxima of the heatmaps are determined, thus giving
the coordinates of the center of the detected bound-
ing boxes. These are then used to extract predictions
on the dimension maps, which finally allows to re-
construct the bounding boxes. Then, the estimated
bounding boxes can be used to extract emotion pre-
dictions by taking the average value of pixels in the
corresponding area of the emotion maps. Therefore,
using maps for these two tasks allows them to be pro-
cessed in parallel, in addition to processing all sub-
jects in a single forward pass, simply by feeding the
architecture with the raw image.
2.3 Knowledge Amalgamation
Since the model is fed with the raw image, it has
access to different types of information, that can be
subject-related, such has the facial expressions, but
also context-related, for example the place or the ob-
jects. To force the backbone to extract rich features
covering these aspects, we decided to use teacher net-
works to generate examples of what these features
should look like.
Given N teacher models, each of which denoted
by T
i
, we obtain N feature maps F
T
i
. We want the
student network to produce feature maps F
S
that imi-
tate those of the teachers. To do so, we transform all
these features to a common space, similarly to (Luo
et al., 2019) and (de Carvalho et al., 2022). Thus,
we first ensure that they all are of equal dimensions
by using a 2−dimensional convolution with a kernel
of size 1 × 1 per network, giving the aligned features
Knowledge Amalgamation for Single-Shot Context-Aware Emotion Recognition
413

noted f
T
i
and f
S
. This aligned features have a fixed
number of channels C, where C is a multiple of N.
Then, we use a shared extractor composed of 3 resid-
ual blocks to project f
T
i
and f
S
into
ˆ
f
T
i
and
ˆ
f
S
, where
the number of channels is still C.
However, when N > 1, we also add a last
2−dimensional convolution with a kernel of size 1×1
shared among the teachers, that transforms the
ˆ
f
T
i
to
ˆ
f
R
T
i
with a reduced number of channels equal to
C
N
.
This actually allows us to concatenate these
ˆ
f
R
T
i
fea-
tures to create
ˆ
f
T
, that has the same number of chan-
nels than
ˆ
f
S
but still contains the knowledge of all the
teachers. Similar process has also been used in (Shen
et al., 2019a). On the other hand, with N = 1, we
directly have
ˆ
f
T
=
ˆ
f
T
i
.
To further make the learning of the common fea-
ture space more robust, we add a learnable decoding
module that must reconstructs F
T
i
, i = 1, ..., N, from
ˆ
f
T
. It is to ensure that the projected features can be
“mapped back”. We denote the reconstructed features
ˆ
F
T
i
, i = 1, ...,N. Figure 2 (b) summarize the whole
amalgamation process.
3 FRAMEWORK DETAILS
3.1 Teacher Models
Our architecture uses HRNet-W32 (Wang et al.,
2020) as backbone. It contains four stages with four
parallel convolution streams. The resolutions are 1/4,
1⁄8, 1⁄16, and 1⁄32 of the input image, while the widths
(numbers of channels) of the convolutions are C, 2C,
4C, and 8C (C = 32). Such backbone has been used
for many tasks, including image classification, se-
mantic segmentation, human pose estimation, object
detection and facial landmarks detection
1
. This illus-
trates that it is capable of extracting various kind of
features, and its design also allows to keep quite high
resolution information, which is convenient for our
bottom-up approach. Moreover, many of these trained
versions are available online, and can be directly used
as teachers for our knowledge amalgamation process.
Yet, we also would like to use teachers specialized
in emotion recognition task, and as far as we know,
HRNet-W32 has not been used in this field. This is
why we decided to train two more teachers.
The first teacher has been trained for Facial Emo-
tion Recognition (FER), because facial expressions
are well known to be one of the most important non
verbal cues to infer people’s emotions. We used
1
https://github.com/HRNet
Table 2: Performance of our two teachers compared with
the baselines on AffectNet and EmoSet databases.
Database
Baseline Teacher
Acc. / F1-score Acc. / F1-score
AffectNet 0.64 / 0.55 0.61 / 0.61
EmoSet 0.74 / - 0.71 / 0.72
AffectNet (Mollahosseini et al., 2017) as database,
which regroups more than 1,000,000 facial images
from the Internet. Actually, we trained our teacher
with a subset of 291,651 pictures of aligned faces
(224 × 224), annotated for 8 emotions (Anger, Con-
tempt, Disgust, Fear, Happiness, Neutral, Sadness,
and Surprise). Nevertheless, in context aware emo-
tion recognition images, it is not always possible (or
reliable) to only use the facial expression of a per-
son to assess its emotion. We then have to focus on
other clues, such as the places, the objects or the ac-
tivity to extrapolate the emotion. In Visual Emotion
Analysis (VEA), we aim to recognize the basic emo-
tions expressed by images of all kind. Thus, this field
is quite correlated with CAER, and this is why we
trained the second teacher on this task. We selected
the EmoSet database (Yang et al., 2023), which con-
tains 3.3 million images in total. The set of 118,102
images we used has been labeled by human annota-
tors for 8 emotions (Amusement, Anger, Awe, Con-
tentment, Disgust, Excitement, Fear, and Sadness).
For both teachers, the classification head we used
is similar to the one proposed in (Wang et al., 2020),
except that we reduce the number of channels of the
second to last layer from 2048 to 1024, because of
the small amount of classes we are dealing with. We
use random perspective transformations and random
horizontal flip as data augmentations. We train the
models using the Cross Entropy loss and the Adam
optimizer (Kingma and Ba, 2014) with a learning rate
of 10
−3
, during 150 epochs.
Then, for both AffectNet and EmoSet, the selected
model is the one giving the best average F1-Score
on the validation set. We preferred average F1-score
over accuracy because of its ability to better represent
the classifier’s performance when dealing with imbal-
anced classes, which is often the case with emotions.
We also compared the performance of our teachers
with the baselines of both datasets (Table 2). The ac-
curacy of our AffectNet teacher is slightly lower than
the baseline (Mollahosseini et al., 2017), but the F1-
score is better, which is not so surprising since we
selected our best model using this latter metric. For
EmoSet, we are also lower than the baseline (Yang
et al., 2023) regarding the accuracy, and the F1-Score
is not provided by the authors. Yet, our teachers are
simple classifiers without any attempt to be particu-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
414

larly well adapted for their task, but we assume that
their performances are sufficient for our experiments.
Actually, using even better models could be a future
work.
We finally selected a third teacher from the pool of
available pre-trained models online, which has been
used for Object Detection (OD) on COCO dataset
(Lin et al., 2014).
3.2 Losses
For the training of the emotion recognition task in the
case of multi-labels annotations, we use the following
loss:
L
emo
=
−1
N
N
∑
n=1
E
∑
i=1
log
σ(
ˆ
Y
n,i
)
if Y
n,i
= 1
log
1 − σ(
ˆ
Y
n,i
)
otherwise,
(1)
where N is the number of people in the image, E is
the number of emotions,
ˆ
Y
n,i
and Y
n,i
are namely the
logit and the ground truth for the i −th emotion of the
n − th person, and σ() the sigmoid function. When
the annotation is a single class of emotion, the loss
becomes:
L
emo
=
−1
N
N
∑
n=1
log
exp(
ˆ
Y
n
)
∑
E
i=1
exp(
ˆ
Y
n,i
)
, (2)
where
ˆ
Y
n
is the logit of the class that should be acti-
vated for the n−th person (regarding the annotation),
and
ˆ
Y
n,i
the logit for the i − th class of emotion of the
n −th person.
Since the predictions for a given person are ex-
tracted from the emotion maps by taking the average
value
¯
P of the pixels inside its bounding box, we also
add the following constraint:
L
var
=
1
N
P
N
P
∑
i=1
(P
i
−
¯
P)
2
, (3)
where N
P
is the number of pixels inside the bound-
ing box, and P
i
is the value of the i − th pixel. Basi-
cally, this constraint amounts to imposing zero vari-
ance within the pixels of the bounding box.
For the detection task, following (Zhou et al.,
2019), the focal loss is used to train the generation
of heatmaps, and the L1 loss for the regression of the
bounding boxes dimensions. The focal loss is defined
as follows:
FL =
−1
N
∑
xy
1 −
ˆ
Y
xy
α
log
ˆ
Y
xy
if Y
xy
= 1
1 −Y
xy
β
ˆ
Y
xy
α
log
1 −
ˆ
Y
xy
otherwise
(4)
where α = 2 and β = 4 are hyper-parameters, N is
the number of subjects,
ˆ
Y
xy
and Y
xy
are namely the
prediction and the ground truth at pixel (x, y). The
normalization by N is chosen in order to normal-
ize all positive focal loss instances to 1. For the
size loss, given a subject k whose bounding box co-
ordinates are
x
k
1
, y
k
1
, x
k
2
, y
k
2
, his center point lies at
p
k
=
x
k
1
+x
k
2
2
,
y
k
1
+y
k
2
2
, and his dimensions are s
k
=
x
k
2
− x
k
1
, y
k
2
− y
k
1
. Therefore, the size loss is defined
as follows:
L
size
=
1
N
N
∑
k=1
ˆ
S (p
k
) − s
k
, (5)
where
ˆ
S are the width and height prediction maps.
Hence, the total detection loss is:
L
det
= FL + γ × L
size
(6)
where γ = 0.1 following (Zhou et al., 2019). Concern-
ing the knowledge amalgamation process, we define
our feature loss as following:
L
f eat
=
mask(
ˆ
f
T
−
ˆ
f
S
)
2
N
mask
, (7)
where mask(A − B) is used to apply the difference
only between the strictly positive pixels of A and the
corresponding ones in B, and N
mask
is the number of
pixels in the mask. Since we have
ˆ
f
T
≥ 0 and
ˆ
f
S
≥ 0
because of the ReLu layers, it is a trick to focus on
the pixels carrying the information instead of encour-
aging the network to output zero values. The recon-
struction loss also uses the mask(A − B) function on
the N teacher’s features F
T
i
, i = 1, ..., N and the recon-
structed ones
ˆ
F
T
i
, i = 1, ..., N:
L
rec
=
N
∑
i=1
mask(F
Ti
−
ˆ
F
Ti
)
2
N
mask
, (8)
Finally, the total loss is defined as:
L
TOT
= L
det
+ L
emo
+ L
var
+ L
f eat
+ L
rec
(9)
3.3 Training Procedure
The method is built with the Pytorch toolbox (Paszke
et al., 2019). The students trained with the knowledge
amalgamation process are first initialized with the
pre-trained weights obtained from ImageNet (Deng
et al., 2009). Then, every models are trained on the
target dataset during 150 epochs with a batch size
equal to 20. We use the Adam optimizer (Kingma and
Ba, 2014) with a learning rate of 10
−3
. For all the ex-
periments, the input images are resized to 512 × 512,
and we apply random perspective transformation and
random horizontal flip as data augmentations. Finally,
the best model is defined as the one with the lowest
total validation loss.
Knowledge Amalgamation for Single-Shot Context-Aware Emotion Recognition
415

4 EXPERIMENTS AND RESULTS
4.1 Databases
The EMOTIC database (Kosti et al., 2017; Kosti et al.,
2019) is probably the most used dataset in CAER. It
is composed of 23,571 images, totaling 34,320 an-
notated people in unconstrained environments. Each
picture contains at least one subject, which is anno-
tated with a bounding box, and emotionally labeled
using 26 discrete categories in a multi-label manner,
as well as 3 continuous dimensions (Valence, Arousal,
and Dominance). Using such a large number of emo-
tion classes coupled with multi-label annotations in-
evitably results in quite unbalanced data, making the
dataset particularly challenging. Finally, the provided
partition of the dataset is 70% for the training set,
10% for the validation one, and the remaining 20%
are used for testing.
The HECO database (Yang et al., 2022) is on
contrary not very used yet, since it is more recent.
It regroups 9,385 images and 19,781 annotated peo-
ple, with rich context information and various agent
interaction behaviours. Here, only 8 discrete cate-
gories are used (Anger, Disgust, Excitement, Fear,
Happiness, Peace, Sadness, and Surprise), but the 3
continuous dimensions are similar to the ones used
in EMOTIC. The people are also annotated with the
novel Self-assurance (Sa) and Catharsis (Ca) labels,
which describe the degree of interaction between sub-
jects and the degree of adaptation to the context.
Since the authors do not provide any partition of their
dataset, we created our own sets by first sorting the
images into two groups: a first one that contains the
images where only one subject has been annotated,
and a second one regrouping the remaining images.
Then, for each group, all the images were randomly
split into training, validation and test sets (70%, 10%,
and 20%). Finally, the corresponding sets from the
two groups are merged to form the final training, val-
idation, and test partitions. With this procedure, we
ensure that our bottom-up approach is trained and
tested with various images representing both single
and multiple subjects.
4.2 Metrics
To evaluate the model for the CAER task, we cal-
culate the Average Precision score (AP) for all the
emotion categories, and average it (mAP). The pre-
dictions are extracted from the emotion maps using
the annotated bounding boxes. For the person detec-
tion task, we used the COCO API to obtain a mAP
score computed over 10 Intersection over Union (IoU)
Table 3: mAP scores obtained on HECO and EMOTIC
datasets for emotion recognition task.
HECO
Teacher F-T KA Baseline
FER
VEA
OD
26.73
27.14
26.27
27.94
27.26
27.30
26.62
EMOTIC
Teacher F-T KA Baseline
FER
VEA
OD
26.15
25.21
24.86
26.61
26.74
27.10
25.09
thresholds. This metric was initially proposed to eval-
uate object detection on the COCO dataset (Lin et al.,
2014), and here we are in a special case where we
have only one object class (person) to detect. We fi-
nally use the new metric proposed by (Cladi
`
ere et al.,
2023), where the prediction of a subject’s emotion
is automatically counted as a false negative if the
model was not previously able to correctly estimate
its bounding box. This metric is actually more rep-
resentative of the model’s true capability during ”on-
the-field” inferences, where the emotion recognition
task can only be performed if a subject is first clearly
detected in the image.
4.3 Results in Single-Task
Configuration
In order to validate the concept of knowledge amal-
gamation (KA), we first evaluated the performance
of a student model guided by a single teacher on the
HECO and EMOTIC databases. These results are
then compared to those obtained when the teacher
models are fine-tuned (F-T) on these same databases.
We define the baseline as the score obtained with
a similar model initialized with the weights inher-
ited from ImageNet then fine-tuned on the target
dataset. The results are given in Table 3. For the
two emotion-related teachers (FER and VEA), the
fine-tuning on HECO and EMOTIC gives better re-
sults than the baseline, which is not the case for the
OD teacher. It confirms that using pre-trained models
from correlated tasks before fine-tuning on the con-
sidered database is beneficial. However, with our KA
method, whatever the teacher model used, the stu-
dent network will outperform it on both HECO and
EMOTIC, which highlights the superiority of this ap-
proach. This may be explained by the fact that the
model will quickly over-fit in the case of fine-tuning,
probably forgetting the pre-learned task, whereas with
KA the student learns jointly to reproduce useful fea-
tures and exploit them for the new task.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
416
4.4 Results in Multi-Tasks
Configuration
Similar experiments have been conducted with the
detection head added to the student model. In this
configuration, it is evaluated regarding its perfor-
mances in Emotion Recognition (ER), Person Detec-
tion (PD), and ”On-the-field” Emotion Recognition
(OER), where the emotion recognition score depends
on the model’s person detection capabilities (Cladi
`
ere
et al., 2023). The results on HECO are presented in
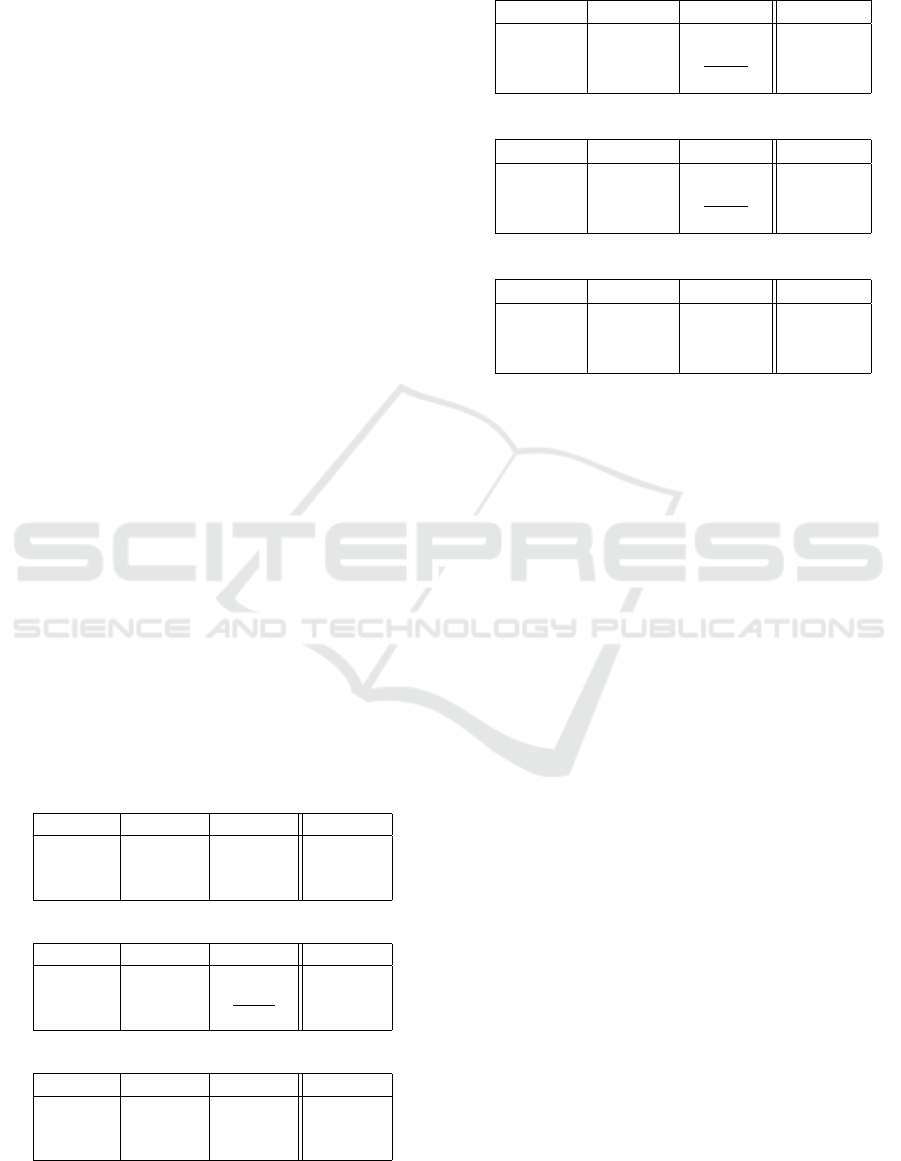
Table 4, and those on EMOTIC in Table 5. The val-
ues in bold correspond to the best score between F-T,
KA and the baseline. The underlined values are the
best score between F-T and KA when none of them
are beating the baseline.
On HECO, KA is always better than F-T and the
baseline, except for PD task using the VEA teacher
where KA is better than F-T but still lower than the
baseline. On EMOTIC, the results are more mixed.
For the FER teacher, KA always outperforms F-T and
the baseline, but for the VEA teacher, while beating
the F-T method, KA does not surpass the baseline in
ER and PD tasks. Concerning the OD teacher, F-T
leads to the best scores for all the tasks.
It is interesting to note that it is always using KA
with the FER teacher that the best PD scores are ob-
tained. This could be explained by the fact that this
teacher was only trained with facial images, thus giv-
ing feature maps activated at the level of the subjects’
heads. Thus, the student model only has to learn to
make the connection between the head already high-
lighted in the features and the rest of the body to
predict a bounding box. This is also beneficial for
Table 4: mAP scores obtained on HECO dataset for ER
task, PD task, and OER task after multi-tasks training.
HECO ER
Teacher F-T KA Baseline
FER
VEA
OD
25.86
26.58
27.66
26.75
26.82
27.67
26.42
HECO PD
Teacher F-T KA Baseline
FER
VEA
OD
33.59
33.84
32.71
35.75
34.08
35.26
35.11
HECO OER
Teacher F-T KA Baseline
FER
VEA
OD
19.72
19.42
20.71
20.36
20.25
21.07
20.10
Table 5: mAP scores obtained on EMOTIC dataset for ER
task, PD task, and OER task after multi-tasks training.
EMOTIC ER
Teacher F-T KA Baseline
FER
VEA
OD
21.87
22.00
22.74
22.61
22.33
22.55
22.33
EMOTIC PD
Teacher F-T KA Baseline
FER
VEA
OD
49.02
50.43
52.39
53.74
51.24
50.37
52.12
EMOTIC OER
Teacher F-T KA Baseline
FER
VEA
OD
20.37
20.13
20.96
20.93
20.83
20.46
20.68
many close-range images inside EMOTIC and HECO
where only faces are visible, which could disrupt a
detection model pre-trained with more far-range ex-
amples.
4.5 Results with Combinations of
Teachers
Since the amalgamation process allows to distill the
knowledge of multiple teachers inside a single stu-
dent, we tested our approach with different combi-
nations of teachers to train a student for CAER task.
As we can see in Table 6, all the combinations lead to
higher scores than the baseline on both datasets. How-
ever, FER+VEA did not perform better than FER and
VEA alone, although one would have thought that the
two teachers complement each other and benefit the
CAER. Actually, this could be explained by the fact
that the AffectNet and EmoSet databases were not an-
notated by the same people, which risks leading to
variations in the ground truths, but also with a dif-
ferent set of emotions. As a result, the two teachers
could provide contradictory features instead of com-
plementary ones, thus disrupting the amalgamation.
On the other hand, the FER+OD and VEA+OD com-
binations give even better results on HECO than us-
ing the teachers independently, which demonstrate the
potential of the amalgamation process to merge differ-
ent yet complementary knowledge.
On EMOTIC, it is finally OD alone which gives
the best score. Furthermore, the fact that combin-
ing all the teachers does not lead to the best score,
while improving the FER+VEA combination on both
datasets, illustrates that there is room for improve-
Knowledge Amalgamation for Single-Shot Context-Aware Emotion Recognition
417

Table 6: mAP scores obtained on HECO and EMOTIC
datasets for emotion recognition task when using up to 3
teachers during the knowledge amalgamation process.
HECO
Teacher(s) KA Baseline
FER
VEA
OD
FER + VEA
FER + OD
VEA + OD
FER + VEA + OD
27.94
27.26
27.30
26.78
28.53
28.09
27.24
26.62
EMOTIC
Teacher(s) KA Baseline
FER
VEA
OD
FER + VEA
FER + OD
VEA + OD
FER + VEA + OD
26.61
26.74
27.10
26.36
26.54
26.82
26.68
25.09
ment of the method, especially in the design of the
common feature space. Indeed, by studying in detail
the distribution of the features from different teachers
in this common space, we could enhance their fusion
by preventing non-constructive cases, such has con-
tradictory, redundant or unbalanced teachers.
5 CONCLUSION AND FUTURE
WORKS
Unlike the other authors from the CAER field, we
have opted in this paper for a single stream model,
which does not require the use of off-the-shelf mod-
ules, or any pre-processing steps. Moreover, the so-
lution we presented is a bottom-up approach instead
of a top-down one, which allows to simultaneously
estimate the emotion of all subjects within an image.
Thus, our framework is very condensed and straight-
forward, and this is why its deployment on the field
seems more feasible than typical solutions from the
literature. We also introduced a knowledge amalga-
mation protocol to distill multiple specialized teach-
ers into a single student network. When relying on a
single teacher for guiding the student model, we sys-
tematically obtained better results than directly fine-
tuning the teacher. On HECO, we further increased
the score by combining two teachers, which is unfor-
tunately not the case on EMOTIC. This illustrates the
potential of our approach, even if more work can be
done to design a more robust and consistent fusion
between the features from many teachers. Finally, we
integrated a detection head to our model, which there-
fore become autonomous since the predictions from
the emotion maps can be extracted without using the
annotations. Even in this multitask configuration, our
knowledge amalgamation method is still almost al-
ways better than simply fine-tuning the teachers, for
the three tasks we evaluated.
As part of future works, we would use more ef-
ficient teachers in their respective domain, which do
not necessarily share the same architecture as the stu-
dent. Indeed, we think that using better features as ex-
ample would benefit the amalgamation process even
more, and that features coming from different archi-
tectures could be more varied and complementary
than those obtained with similar teachers. We would
also make further investigations on the distribution of
the features in the common feature space, to ensure
that they are well aligned even if they come from dif-
ferent tasks. By having a more in-depth comprehen-
sion of this space, we assume that a refined version
of our first attempt of knowledge amalgamation with
several teachers could become more robust and reach
even better scores.
ACKNOWLEDGMENTS
This work was sponsored by a public grant overseen
by the French National Research Agency as part of
project muDialBot (ANR-20- CE33-0008-01).
REFERENCES
Barrett, L. F., Mesquita, B., and Gendron, M. (2011). Con-
text in emotion perception. Current directions in psy-
chological science, 20(5):286–290.
Bendjoudi, I., Vanderhaegen, F., Hamad, D., and Dornaika,
F. (2021). Multi-label, multi-task cnn approach for
context-based emotion recognition. Information Fu-
sion, 76:422–428.
Cheng, B., Xiao, B., Wang, J., Shi, H., Huang, T. S., and
Zhang, L. (2020). Higherhrnet: Scale-aware repre-
sentation learning for bottom-up human pose estima-
tion. In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition, pages 5386–
5395.
Cladi
`
ere, T., Alata, O., Ducottet, C., Konik, H., and
Legrand, A.-C. (2023). Benet: A lightweight bottom-
up framework for context-aware emotion recogni-
tion. In International Conference on Advanced Con-
cepts for Intelligent Vision Systems, pages 100–111.
Springer.
de Carvalho, M., Pratama, M., Zhang, J., and Sun,
Y. (2022). Class-incremental learning via knowl-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
418

edge amalgamation. In Joint European Conference
on Machine Learning and Knowledge Discovery in
Databases, pages 36–50. Springer.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Hoang, M.-H., Kim, S.-H., Yang, H.-J., and Lee, G.-S.
(2021). Context-aware emotion recognition based on
visual relationship detection. IEEE Access, 9:90465–
90474.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kosti, R., Alvarez, J. M., Recasens, A., and Lapedriza, A.
(2017). Emotic: Emotions in context dataset. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition Workshops, pages 61–69.
Kosti, R., Alvarez, J. M., Recasens, A., and Lapedriza,
A. (2019). Context based emotion recognition using
emotic dataset. IEEE transactions on pattern analysis
and machine intelligence, 42(11):2755–2766.
Lee, J., Kim, S., Kim, S., Park, J., and Sohn, K. (2019).
Context-aware emotion recognition networks. In Pro-
ceedings of the IEEE/CVF international conference
on computer vision, pages 10143–10152.
Li, S. and Deng, W. (2020). Deep facial expression recog-
nition: A survey. IEEE transactions on affective com-
puting, 13(3):1195–1215.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Com-
puter Vision–ECCV 2014: 13th European Confer-
ence, Zurich, Switzerland, September 6-12, 2014, Pro-
ceedings, Part V 13, pages 740–755. Springer.
Luo, S., Wang, X., Fang, G., Hu, Y., Tao, D., and Song,
M. (2019). Knowledge amalgamation from heteroge-
neous networks by common feature learning. arXiv
preprint arXiv:1906.10546.
Mittal, T., Guhan, P., Bhattacharya, U., Chandra, R., Bera,
A., and Manocha, D. (2020). Emoticon: Context-
aware multimodal emotion recognition using frege’s
principle. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 14234–14243.
Mollahosseini, A., Hasani, B., and Mahoor, M. H. (2017).
Affectnet: A database for facial expression, valence,
and arousal computing in the wild. IEEE Transac-
tions on Affective Computing, 10(1):18–31.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances in
neural information processing systems, 32.
Shen, C., Wang, X., Song, J., Sun, L., and Song, M.
(2019a). Amalgamating knowledge towards compre-
hensive classification. In Proceedings of the AAAI
Conference on Artificial Intelligence, volume 33,
pages 3068–3075.
Shen, C., Xue, M., Wang, X., Song, J., Sun, L., and Song,
M. (2019b). Customizing student networks from het-
erogeneous teachers via adaptive knowledge amalga-
mation. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 3504–
3513.
Wang, J., Sun, K., Cheng, T., Jiang, B., Deng, C., Zhao,
Y., Liu, D., Mu, Y., Tan, M., Wang, X., et al. (2020).
Deep high-resolution representation learning for vi-
sual recognition. IEEE transactions on pattern anal-
ysis and machine intelligence, 43(10):3349–3364.
Wang, Z., Lao, L., Zhang, X., Li, Y., Zhang, T., and Cui,
Z. (2022). Context-dependent emotion recognition.
Journal of Visual Communication and Image Repre-
sentation, 89:103679.
Yang, D., Huang, S., Wang, S., Liu, Y., Zhai, P., Su, L., Li,
M., and Zhang, L. (2022). Emotion recognition for
multiple context awareness. In European Conference
on Computer Vision, pages 144–162. Springer.
Yang, J., Huang, Q., Ding, T., Lischinski, D., Cohen-Or, D.,
and Huang, H. (2023). Emoset: A large-scale visual
emotion dataset with rich attributes. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 20383–20394.
Ye, J., Wang, X., Ji, Y., Ou, K., and Song, M. (2019).
Amalgamating filtered knowledge: Learning task-
customized student from multi-task teachers. arXiv
preprint arXiv:1905.11569.
Zhang, M., Liang, Y., and Ma, H. (2019). Context-aware
affective graph reasoning for emotion recognition. In
2019 IEEE International Conference on Multimedia
and Expo (ICME), pages 151–156. IEEE.
Zhou, X., Wang, D., and Kr
¨
ahenb
¨
uhl, P. (2019). Objects as
points. arXiv preprint arXiv:1904.07850.
Knowledge Amalgamation for Single-Shot Context-Aware Emotion Recognition
419
