
Lifelong Learning Needs Sleep: Few-Shot Incremental Learning
Enhanced by Sleep
Yuma Kishimoto and Koichiro Yamauchi
a
Department of Computer Science, Chubu University, Kasugai, Japan
Keywords:
Sleep, Lifelong Learning, Incremental Learning, Catastrophic Forgetting, Few-Shot Leanring, Incremental
Few-Shot Learning.
Abstract:
Catastrophic forgetting due to incremental learning in neural networks is a serious problem. We demonstrate
that introducing a sleep period can address this issue from two perspectives. First, it provides a learning period
for re-learning old memories. Second, it allows for time to process new learning. We applied a VAE, enhanced
by an adapter, for incremental learning of new samples and generating valid samples from a few learning
examples. These generated samples are used for the neural network’s re-learning, which also contributes to
improving its generalization ability. The experimental results suggest that this approach effectively realizes
few-shot incremental learning.
1 INTRODUCTION
Artificial intelligence (AI) has rapidly advanced with
improvements in computing power and storage capac-
ity. Deep learning, a core AI technology, achieves
high accuracy through offline learning by layering
neural networks.
Some applications, however, require incremental
learning to handle new tasks. Mixing past training
data with new data demands substantial memory re-
sources, making it impractical in many real-world
scenarios. Lifelong learning models have been devel-
oped to address this by enabling incremental learning
and recognition.
Lifelong learning models have evolved signifi-
cantly. However, they often struggle with catas-
trophic forgetting, which is a critical issue in incre-
mental learning. Existing lifelong learning models
employ various techniques to mitigate this problem,
such as replay mechanisms(e.g., replay-buffer, naive
rehearsal(Hsu et al., 2018) , VQ based(Hayes et al.,
2019), GAN(Shin et al., 2018)(Lesort et al., 2019),
VAE(van de Ven et al., 2020), FearNet(Kemker and
Kanan, 2018)), spontaneous firing(Golden et al.,
2022), and weight consolidation strategies such as
EWC(Kirkpatrick et al., 2017) (Rusu et al., 2016),
Packnet (Mallya and Lazebnik, 2018).
Despite progress, no model has simultaneously
achieved incremental end-to-end learning, knowledge
a
https://orcid.org/0000-0003-1477-0391
reformulation, and immediate response in a short
time. To address this, we propose a novel approach
introducing sleep periods in lifelong learning. These
periods enable relearning old memories and reorga-
nizing existing knowledge.
Our model uses an adapter-enhanced VAE to
record past samples and generate pseudosamples for
data augmentation. The VAE encoder also serves as
the backbone for classification tasks, ensuring model
compactness and quick responses.
This method offers an integrated solution that en-
ables effective incremental learning, enhances knowl-
edge reformulation, and ensures rapid inference after
observing new instances.
Although lifelong learning methods based on self-
organization(e.g. (Parisi et al., 2017)) display proper-
ties similar to ours, they do not use knowledge reor-
ganization. In our model, the sleep process realizes
knowledge reorganization, which contributes to the
acquisition of high generalization capability.
2 RELATED WORKS
This section compares the proposed method with ex-
isting methods related to few-shot learning, incremen-
tal learning, and sleep-based learning.
Kishimoto, Y. and Yamauchi, K.
Lifelong Learning Needs Sleep: Few-Shot Incremental Learning Enhanced by Sleep.
DOI: 10.5220/0013170200003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 243-250
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
243

2.1 Incremental Learning
Incremental or continual learning methods allow new
samples to be learned by an already-trained network.
However, this is always accompanied by catastrophic
forgetting(French, 1999).Various methods have been
proposed to solve this problem.
2.1.1 Replay Model
Naive Rehearsal (Hsu et al., 2018) and Remind(Hayes
et al., 2019) address catastrophic forgetting by replay-
ing past data alongside new data. Methods utilizing
VQ improve efficiency by compressing data and re-
ducing memory usage, but increasing past data raises
memory consumption, making them unsuitable for
resource-limited environments. To solve this prob-
lem, generative replay models were developped.(Shin
et al., 2018)(Kemker and Kanan, 2018)(Lesort et al.,
2019)(Liu et al., 2020)(van de Ven et al., 2020).
These methods, however, require training a neural
network as a replay buffer. To prevent catastrophic
forgetting, many past samples must be mixed during
training, leading to high computational costs.
2.1.2 Weight Consolidation
Catastrophic forgetting occurs when modifying
weight connections critical to past knowledge. Freez-
ing these connections during new learning retains
memories. EWC(Kirkpatrick et al., 2017) and synap-
tic intelligence(Zenke et al., 2017) minimize the im-
pact of new tasks by restricting changes to impor-
tant weights, while PackNet(Mallya and Lazebnik,
2018) partitions network capacity by masking criti-
cal weights for each task, enabling continuous learn-
ing. This method preserves past knowledge by fixing
task-specific weights. However, these approaches are
unsuitable for environments with incrementally pro-
vided datasets because fixed weights cannot be up-
dated, limiting their adaptability.
2.2 Methods that Mimic Sleep
Many organisms have sleep periods, often remaining
inactive during them. Inspired by this, several meth-
ods introduce periodic learning into machine learning,
enabling continuous incremental learning.
2.2.1 Incremental Learning with Sleep (ILS)
The ILS model utilizes two types of radial basis func-
tions (RBFs) (Yamauchi and Hayami, 2007). During
daytime learning, one RBF incrementally learns new
samples by adding RBFs, while the other prunes re-
dundant RBFs using pseudo-samples. After nighttime
learning, all daytime RBFs are replaced with param-
eters from the night-learned RBF. This cycle repeats
daily. The system showed improved generalization
after nighttime learning compared to daytime learn-
ing. However, its simple network structure limits its
recognition accuracy.
2.2.2 Sleep Models Using Spiking Neuron
Models
The spiking neuron model mimics brain sleep pro-
cesses, reproducing synaptic firing to prevent catas-
trophic forgetting during continuous learning. The
multilayer spiking neural network (Golden et al.,
2022) uses spontaneous firing during sleep to form
shared synaptic weights, ensuring existing tasks are
preserved when new tasks are added. By integrating
a pseudo-sleep process for re-learning, this approach
reviews past tasks and mitigates catastrophic forget-
ting. While still in its early stages, this model has
demonstrated memory retention during sleep, but the
evolution of learning outcomes requires further anal-
ysis.
2.2.3 FEARNet
FEARNet(Kemker and Kanan, 2017) is a continuous
learning approach that combines short- and long-term
memory networks to adapt to new tasks while retain-
ing prior knowledge. It uses ResNet as the back-
bone for feature extraction. As new data are intro-
duced, features are pre-extracted, and knowledge ac-
cumulates in both memory networks, leveraging re-
play mechanisms for learning.
While ResNet provides strong feature extraction,
FEARNet relies on pre-extracted features, making it
less flexible for adapting to diverse datasets and tasks.
This reliance on ResNet limits its scalability despite
its strengths in continuous learning.
2.3 Positioning of the Proposed Method
As detailed in 3.1,this paper proposes a continual few-
shot learning method using VAE and k-nearest neigh-
bors (K-NN). Features are extracted by VAE, with an
adapter layer mitigating catastrophic forgetting. Un-
like FearNet, VAE handles feature extraction flexibly,
enabling efficient task adaptation.
The method employs a two-stage learning pro-
cess: daytime learning for new tasks and nighttime
learning for reviewing and reconstructing knowledge.
This approach efficiently adapts to continual tasks
while preserving past knowledge
Table 1 compares the proposed method with ma-
jor few-shot continual learning methods, highlight-
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
244
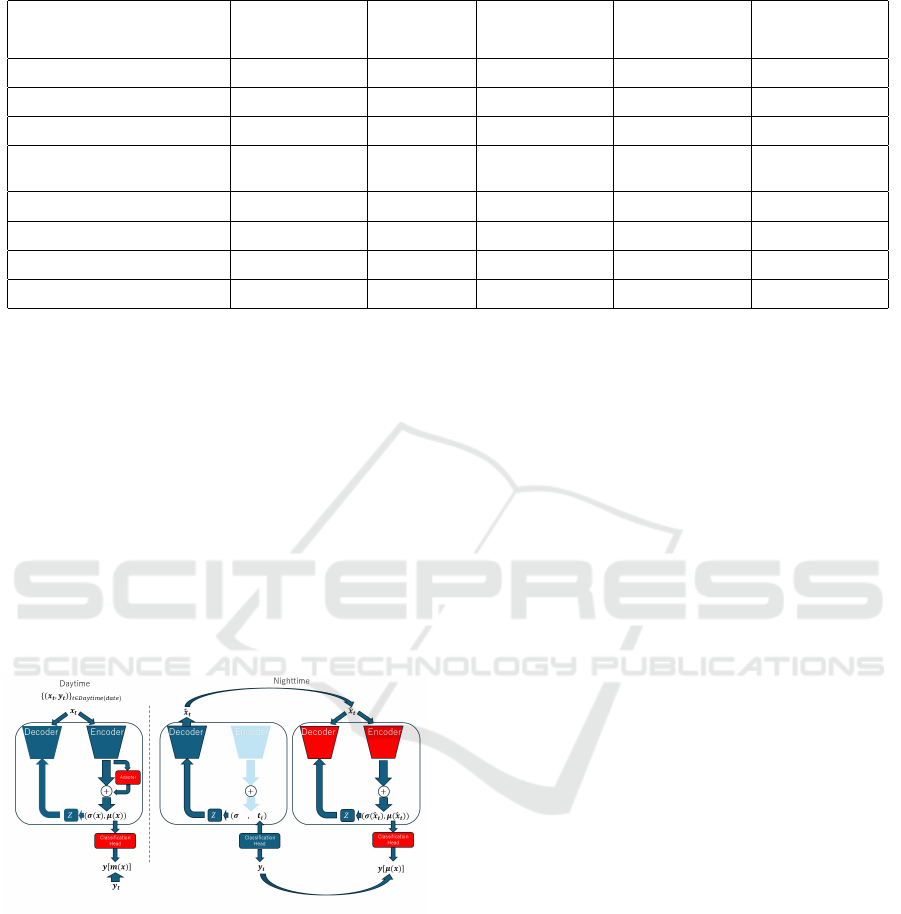
Table 1: Comparison of Methods.
Method
Catastrophic
Forgetting
Prevention
Scalability
Knowledge
re-organization
Computation
Resource
Efficiency
Response time
Generative Replay models
◦ ◦ ◦ △ △
Naive Rehearsal
◦ △ ◦ △ △
VQ-based Methods
◦ △ △ △ △
Multi-layer Spiking
Neural Network
△ △ ◦ △ △
EWC
△ △ × △ △
PackNet
◦ △ × △ △
FEARNet
◦ × △ △ ◦
Proposed Method
◦ ◦ ◦ ◦ ◦
ing their characteristics. These methods are evalu-
ated based on network size efficiency, suppression of
catastrophic forgetting, scalability, and computational
resource efficiency. The proposed method excels in
scalability, knowledge re-organization, and computa-
tional efficiency in a continual learning environment.
In the table, ◦ indicates superiority, △ average perfor-
mance, and × poor performance.
3 PROPOSED METHOD
3.1 Overview
Figure 1: Learning Stages and Flow.
Environments in which learning systems are used, re-
quire that known samples be recognized while learn-
ing new samples incrementally. When new samples
arise, rapid incremental learning is needed to up-
date the recognition system and adapt it to subse-
quent tasks. Few-shot incremental learning faces the
dual challenges of catastrophic forgetting and overfit-
ting. Combining data augmentation with incremental
learning can mitigate these risks.
Figure 1 outlines the proposed method, which al-
ternates between two stages: daytime (learning new
tasks) and nighttime (reviewing past tasks and recon-
structing knowledge). This model combines a VAE
with NNs as recognition heads, with the VAE encoder
serving as the backbone. During daytime, NNs learn
few-shot samples as feature-label pairs from the back-
bone. The Adapter, introduced by (Houlsby et al.,
2019), is attached to the encoder’s output to adapt
and reconstruct new samples, mitigating catastrophic
forgetting without updating the original VAE param-
eters.
However, at night, copies of the NNs and decoder
from the original VAE are used to generate learn-
ing samples by producing previously memorized sam-
ples, and the VAE is retrained. In this retraining pro-
cess, contrastive loss was used to train the metric.
In the following sections, we explain the recogni-
tion head (NNs and VAE) with the attached Adapter,
followed by a detailed description of the two learning
periods, daytime and nighttime.
3.2 VAE with an Adapter
The model uses a variational autoencoder
(VAE)(Kingma and Welling, 2014) for feature
extraction and data expansion in both day and night
phases. The VAE, composed of a CNN-based
encoder and decoder, outputs a latent variable z from
input x, assumed to follow the following normal
distribution.
q
φ
(z|x) = N (µ
φ
(x), σ
2
φ
(x)) (1)
Here, φ denotes the parameter vector of the encoder.
By contrast, the decoder reconstructs the input vector
from z. That is,
p
θ
(x|z) = N (µ
θ
(z), σ
2
θ
(z)) (2)
Here, θ denotes the parameter vector of the decoder.
The parameter vectors are optimized through learning
Lifelong Learning Needs Sleep: Few-Shot Incremental Learning Enhanced by Sleep
245
by minimizing the following Kullback-Leibler diver-
gence (KLD) loss function:
L(θ, φ; x) = −D
KL
(q
φ
(z|x)||p(z))
+ Eq
φ
(z|x)[log p
θ
(x|z)] (3)
The VAE originally minimizes Eq 3 using a fixed
dataset. During daytime, incremental learning is
needed as new samples are provided. Minimizing Eq
3 with only new samples risks catastrophic forgetting,
losing prior information.
To address this, an Adapter(Houlsby et al., 2019)
is added to the encoder. The adapter, a single linear
layer, is inserted as a bypass in the output of the en-
coder’s final layer.
µ
φ
(x) = µ
φ
(x) + f
Adapter,µ
[W
T
aµ
µ
φ
(x) + b
µ
] (4)
σ
φ
(x) = σ
φ
(x) + f
Adapter,σ
[W
T
aσ
σ
φ
(x) + b
σ
] (5)
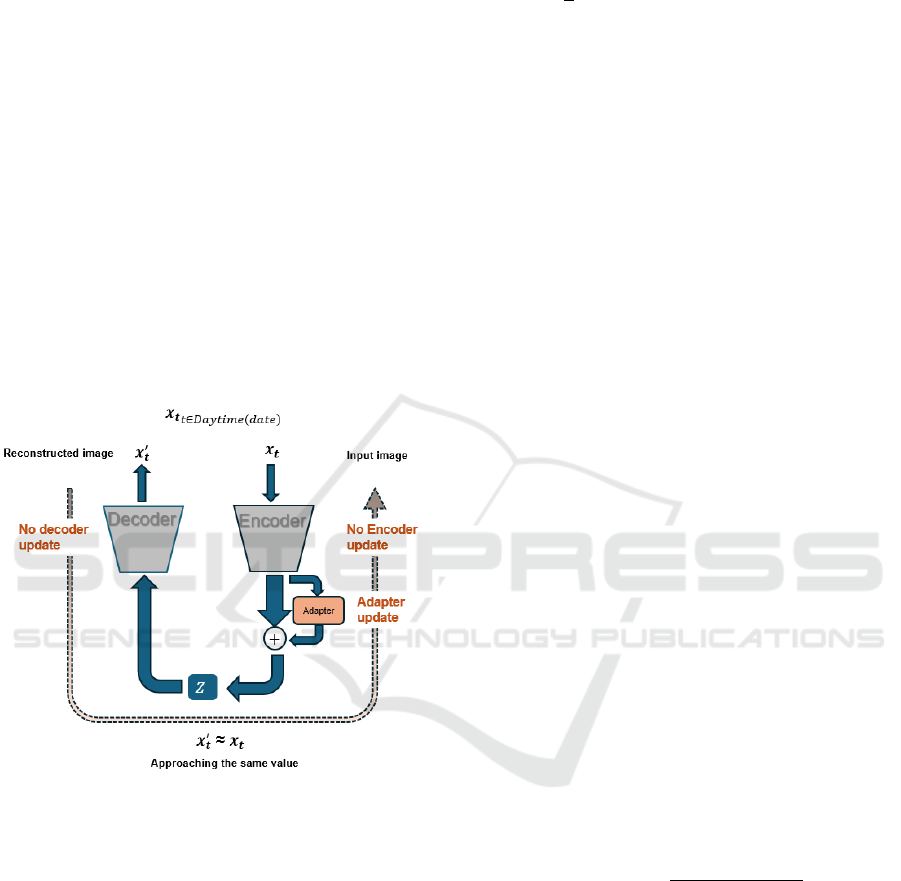
Figure 2: Adapter Update Flow.
Eq 3 is calculated as follows: The VAE mainly
learns during nighttime. Let an input image from a
set of new data be x
i
∈ D
new
(date), the latent variable
obtained through the encoder be z
i
, and the image re-
constructed through the decoder µ
θ
(z
i
) be x
′
i
.
The reconstruction error representing the differ-
ence between x
i
and x
′
i
is calculated using the binary
cross-entropy(Kingma and Welling, 2014) in Eq 6.
L
recon
(D
new
(date)) =
−
∑
i∈D
new
(date)
x
i
logx
′
i
+ (1 − x
i
)log(1 − x
′
i
)
(6)
Additionally, the KL divergence between latent
variable z and its prior distribution is calculated us-
ing Eq 7 and included in the loss function.
L
KL
(D
new
(date))
= −
1
2
∑
i∈D
new
(date)
1 + log(σ
2
i
) − µ
2
i
− σ
2
i
(7)
where σ
i
is the variance of the input data and µ
i
is the mean of the input data. From Eqs 6 and 7 , the
total loss of the VAE is expressed as shown in Eq 8.
L
total
(D
new
(date)) =
L
recon
(D
new
(date)) + L
KL
(D
new
(date)) (8)
When updating the Adapter, the parameters of the
encoder and decoder are fixed, and updating is per-
formed using Eq 9 only for the set of new samples
from that day, as shown in Figure 2. D
new
(date) ≡
{(x
t
, y
t
)}
t∈Daytime(date)
.
∆θ
a
∝ −∇
θ
a
L
total
(D
new
(date)), (9)
where θ
a
= [W
aµ
, w
aσ
, b
µ
, b
σ
]
T
.
In this way, by training only the Adapter layer,
the weights of the existing encoder and decoder re-
main fixed, preserving the information from previ-
ously learned tasks, thereby preventing catastrophic
forgetting.
3.3 Recognition Head
Nearest neighbors perform both learning and recog-
nition as recognition heads. The NN is com-
posed of feature vectors µ
φ
(x
i
) and variance vectors
σ
φ
(x
j
)obtained from the encoder in Eq 4 and corre-
sponding labels y
i
. This set is referred to as the sup-
port set S.
S ≡ {(µ
φ
(x
j
), σ
φ
(x
j
), y
j
)| j = 1, ·· · , M} (10)
During recognition, the label vector y
i
∗
of the tem-
plate vector closest to the mean vector µ
φ
(x) is output.
That is
i
∗
= argmax
j
µ
φ
(x)
T
µ
φ
(x
j
)
∥µ
φ
(x)∥∥µ
φ
(x
j
)∥
(11)
The σ(x
j
) will be used for data augmentation as ex-
plained in 3.4.1.During daytime learning, the Adapter
is configured for the new samples, and the feature and
variance outputs are adjusted for the new samples.
The adjusted feature outputs are then used to add a
new support set to the existing support S. That is,
S = S ∪ {(µ
φ
(x
j
), σ
φ
(x
j
), y
j
)| j ∈ D
new
(date)} (12)
After daytime learning, recognition results are de-
termined by nearest neighbors. Inputs include known
and newly learned samples, so cosine similarities of
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
246

feature outputs are compared, with and without the
adapter, to select the most probable labels. During
nighttime learning, the VAE and support sets are re-
built because the encoder’s feature outputs change.
S
new
≡ {(µ
φ
′
(x
j
), y
j
)| j ∈ χ} (13)
where φ
′
denotes the re-constructed VAE during
nighttime learning. Therefore, the next day, the learn-
ing process is stated after initialization as follows:
S = S
new
, φ = φ
′
(14)
3.4 Entire Learning Process
Here, the entire learning process is briefly explained.
The learning process is divided into two categories:
daytime and nighttime learning.. Note that ini-
tially, VAE initial learning must be performed to
successfully realize data augmentation. Two VAEs
are prepared for each learning phase. Therefore,
BaseVAE:(φ, θ)] is used for daytime learning, and
SubVAE:(φ
′
, θ
′
) for nighttime learning.
3.4.1 Daytime Learning
During daytime learning, the BaseVAE learns
from the new samples D
new
(date) ≡ {(x
t
, y
t
)|t ∈
Daytime(date)}.
First, the Adapter learns using Eq 9. Subse-
quently, NN appends new prototypes using Eq 12.
3.4.2 Nighttime Learning (Sleeping)
During nighttime learning, data augmentation and the
training of SubVAE are executed simultaneously. In
this process, latent vectors z are generated using the
templates in the NN.
z ∼ N (µ
φ
(x
j
), σ(x
j
)
2
) (15)
The proposed system generates M samples for each
template vector.The decoder generates input vector
from z as follows. In this paper, let us denote the set
of generated input vectors as R.
R = R ∪(µ
θ
(z), y
j
), (16)
The relearning process uses SubVAE(φ
′
, θ
′
), and
parameters of SubVAE are initialized using the pa-
rameters of BaseVAE
During nighttime learning, the SubVAE attempts
to minimize not only the standard loss defined in Eq
3 but also a contrastive loss for the decoder. The con-
trastive loss is defined by
L
contrast
=
1
N
∑
(i, j)∈RBuffer,i̸= j
y
i
·∥µ
φ
′
(x
i
)−µ
φ
′
(x
j
)∥
2
+ (1 − y
i
) · max(0, m − ∥µ
φ
′
(x
i
) − µ
φ
′
(x
j
)∥
2
)
(17)
Therefore, the SubVAE performs learning using
the following loss function during nighttime learning.
L
nightime
= L
total
+ L
contrast
, (18)
where, L
total
is defined by Eq 8.
After learning the SubVAE, the nearest neighbors
are rebuilt from scratch. Therefore, the template vec-
tors are generated from the encoder in the SubVAE
without its adapter: µ
φ
′
(x
j
), where x
j
∈ RBuffer and
the label for each template is set to the corresponding
label y
j
∈ R.
4 EXPERIMENTS
This section presents preliminary benchmark results
using the MNIST dataset to evaluate the proposed
system. Ablation tests were conducted to assess the
impact of each technique introduced in the method.
4.1 Initial Setting
This experiment used the MNIST dataset, consisting
of grayscale images of handwritten digits (0–9) with
60,000 training and 10,000 test samples, each 28 × 28
pixels. Data were divided for incremental learning:
classes [0–4] for the 1st daytime learning and [5–9]
for the 2nd. The experiment followed two phases:
”daytime” and ”nighttime.” In daytime learning, the
model learns from new data (30 batches of [0–4] for
the 1st and [5–9] for the 2nd). During nighttime learn-
ing, the VAE reconstructs data by decoding feature
representations from both newly learned and previ-
ously learned data.
4.2 RESULTS
4.2.1 Entire Behavior of the Proposed Model
Table 2 presents the accuracies after the 1st daytime
learning, 1st sleep learning, 2nd daytime learning, and
2nd sleep learning. We can see from the table that
accuracy after daytime learning increased following
successful sleep learning.
Lifelong Learning Needs Sleep: Few-Shot Incremental Learning Enhanced by Sleep
247

Data: BaseVAE:(φ, θ), SubVAE:(φ
′
, θ
′
),
Adapter: θ
a
, M , χ
init
, D
new
initialize BaseVAE:(φ, θ) by using L
total
(χ
init
)
while True do
receive new samples
D
new
= {(x
p
, y
p
)}
n
p=1
optimize Adapter: θ
a
to minimize
L
total
(D
new
) with
freezing BaseVAE:(φ, θ).
Append prototypes to the Nearest
Neighbors (NNs).
for (x
t
, y
t
) ∈ D
new
do
f
meant
= µ
φ
(x)
S = S ∪ {(µ
φ
(x
t
), σ
φ
(x
t
))}
end
Expanding D
new
and old memories.
for each µ
φ
(x
i
), σ
φ
(x
i
), y
i
where i ∈ S do
for n = 0 to M do
R =
R ∪ {µ
θ
(z( f
µ
φ
(x
i
)), σ
φ
(x
i
), y
i
)}
end
end
Initialize new VAE parameters
φ
′
= φ, θ
′
= θ
optimize φ
′
, θ
withoutAdapter.
by using L
total
(R)
Rebuild the nearest neighbors
S = Φ
for each (x
j
, y
j
) ∈ R do
f
mean j
= (µ
φ
′
(x
j
), σ
φ
′
(x
j
))
S = S ∪ {( f
mean j
, y
j
)}
end
φ = φ
′
, θ = θ
′
end
Algorithm 1: Learning Flow Algorithm.
4.2.2 Ablation Test
An ablation study evaluated the proposed method by
removing individual components. Removing the VAE
Adapter reduced recognition accuracy by 5%, while
removing contrastive loss reduced it by 7%. These
results highlight the importance of each module for
learning performance.
Ablation Test: Effect of Removing the Adapter.
The Adapter layer enables the VAE to retain past
knowledge while adapting to new data efficiently dur-
ing daytime, without significant parameter updates.
Its purpose is to prevent catastrophic forgetting and
support learning new knowledge alongside existing
knowledge.
Experimental results show that removing the
Adapter layer reduced recognition accuracy by 5%
(Table 3). This highlights significant catastrophic
forgetting, where previously learned knowledge was
rapidly lost. The Adapter improves long-term perfor-
mance by balancing knowledge retention and updates
with new data.
Figure 3: Left: without adapter, Right: with adapter.
Subjective evaluation assessed the visual quality
of generated images, focusing on classes [0, 4, 8].
Without the Adapter, results were poor. As shown
in Figure 3, images generated with the Adapter were
clearer, more stable, and less noisy. This aligns with
the decline in label prediction accuracy, highlighting
the Adapter’s role in improving model learning and
image generation.
These findings confirm the Adapter’s effective-
ness in maintaining flexibility and preventing catas-
trophic forgetting, crucial for balancing past and new
data.
Ablation Test: Effect of Removing the Contrastive
Loss. Contrastive loss enhances the separation of
data points in latent space, improving interclass dis-
criminability. It brings same-class points closer and
separates different-class points by a distance, increas-
ing intraclass density of latent vectors and easing
interclass discrimination. Additionally, it improves
template quality, boosting nearest-neighbor prototype
accuracy.
Removing contrastive loss reduced recognition
accuracy by 7% (Table 4), indicating insufficient class
separation in latent space and degraded discrimina-
tion performance. With contrastive loss, class dis-
tances in latent space are maintained, improving clas-
sification accuracy.
In conclusion, contrastive loss is essential for en-
hancing the proposed method’s discriminative ability,
enabling clear class separation and improved perfor-
mance.
4.2.3 Sleep Learning Effectiveness
Nighttime learning was introduced to prevent accu-
racy decline after daytime learning, and its effective-
ness was verified. As shown in Table 2 ”Day2,”
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
248
Table 2: Recognition Accuracy by Class After Daytime and Nighttime Learning.
Class Day 1 (Daytime) Day 1 (Nighttime) Day 2 (Daytime) Day 2 (Nighttime)
0 99.18 98.88 98.37 89.08
1 99.47 99.47 99.47 92.51
2 82.85 81.20 80.72 67.54
3 89.90 85.64 85.15 74.52
4 89.92 90.22 89.21 67.68
5 0.00 0.00 46.86 77.91
6 0.00 0.00 62.73 91.96
7 0.00 0.00 50.97 81.32
8 0.00 0.00 35.73 84.29
9 0.00 0.00 16.55 78.30
Table 3: Accuracy Comparison Between Proposed Method
and Without Adapter after the 2nd sleep learning.
Proposed Without
Class Method(%) Adapter(%)
0 89.08 77.86
1 92.51 93.30
2 67.54 78.88
3 74.52 74.75
4 67.68 39.51
5 77.91 76.91
6 91.96 92.59
7 81.32 82.49
8 84.29 67.66
9 78.30 70.17
Average
Accuracy 80.51 75.41
Table 4: Accuracy Comparison Between Proposed Method
and Without Contrastive Loss after the 2nd sleep learning.
Proposed Without
Class Method(%) Contrastive Loss(%)
0 89.08 80.61
1 92.51 96.04
2 67.54 78.10
3 74.52 76.04
4 67.68 57.23
5 77.91 70.18
6 91.96 68.48
7 81.32 76.26
8 84.29 67.56
9 78.30 63.83
Average
Accuracy 80.51 73.43
recognition accuracy for classes 5–9 significantly de-
creased after daytime learning but improved remark-
ably after nighttime learning. This suggests that fo-
cusing on new data during daytime learning degrades
past knowledge, lowering accuracy.
Nighttime learning uses both newly acquired data
and reconstructed past data, reinforcing prior knowl-
edge and preventing catastrophic forgetting. The
VAE’s reconstructed data supplements unseen pat-
terns, balancing past memory retention with new
knowledge acquisition.
5 DISCUSSION
Ablation studies verified the contribution of each
module in the proposed method to learning perfor-
mance. Removing elements like the Adapter and con-
trastive loss demonstrated their quantitative roles in
the method’s core mechanisms.
The proposed framework introduces a novel per-
spective by achieving efficient learning with limited
data and preventing catastrophic forgetting through
daytime and nighttime learning cycles. This high-
lights its potential for sequential data processing in
real-world applications.
In the future, to further broaden the scope of the
proposed method, comparative experiments should be
conducted with other state-of-the-art methods to con-
firm its relative superiority. However, at this stage, the
significance lies in the fact that the proposed method
offers a new direction.
6 CONCLUSIONS
This study proposed a VAE-based method with an
Adapter layer and Contrastive Loss to tackle catas-
trophic forgetting in sequential learning. A two-stage
learning process adapts to new data during daytime
and integrates knowledge at night, enabling efficient
learning while retaining past knowledge.
Ablation studies showed that removing the
Adapter and Contrastive Loss reduced accuracy by
5% and 7%, respectively, highlighting their roles in
class separation and knowledge retention.
The Adapter, analogous to the hippocampus in the
biological brain, plays a crucial role in learning new
Lifelong Learning Needs Sleep: Few-Shot Incremental Learning Enhanced by Sleep
249

samples, reflecting the benefits of mimicking biologi-
cal brain strategies in AI development.
Future work includes applying this method to
complex datasets, optimizing hyperparameters, and
comparing it with state-of-the-art sequential learning
methods to validate its effectiveness.
ACKNOWLEDGMENTS
I am grateful to Mr Naoki Kanemoto for participating
in the discussions that contributed to this paper. I also
thank the reviewers for their constructive feedback.
REFERENCES
French, R. M. (1999). Catastrophic forgetting in connec-
tionist networks. TRENDS in Cognitive Sciences,
3(4):128–135.
Golden, R., Delanois, J. E., Sanda, P., and Bazhenov,
M. (2022). Sleep prevents catastrophic forget-
ting in spiking neural networks by forming a joint
synaptic weight representation. PLoS Comput Biol,
18(11):e1010628.
Hayes, T. L., Kafle, K., Shrestha, R., Acharya, M., and
Kanan, C. (2019). Remind your neural network to
prevent catastrophic forgetting. CoRR.
Houlsby, N., Giurgiu, A., Jastrzebski, S., Morrone, B.,
de Laroussilhe, Q., Gesmundo, A., Attariyan, M., and
Gelly, S. (2019). Parameter-efficient transfer learn-
ing for nlp. In Proceedings of the 36th International
Conference on Machine Learning (ICML), 2019, page
2790–2799.
Hsu, Y.-C., Liu, Y.-C., Ramasamy, A., and Kira, Z. (2018).
Re-evaluating continual learning scenarios: A cate-
gorization and case for strong baselines. In Ben-
gio, S., Wallach, H., Larochelle, H., Grauman, K.,
Cesa-Bianchi, N., and Garnett, R., editors, Advances
in Neural Information Processing Systems 31. Curran
Associates, Inc.
Kemker, R. and Kanan, C. (2017). Fearnet: Brain-
inspired model for incremental learning. ArXiv,
abs/1711.10563.
Kemker, R. and Kanan, C. (2018). Fearnet: Brain-inspired
model for incremental learning. In International Con-
ference on Learning Representations ICLR2018.
Kingma, D. P. and Welling, M. (2014). Auto-encoding vari-
ational bayes. CoRR.
Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J.,
Desjardins, G., Rusu, A. A., Milan, K., Quan, J., and
Ramalho, T. (2017). Overcoming catastrophic forget-
ting in neural networks. Proceeding of the National
Acacemy of United States of America, 114(13):3521–
3526.
Lesort, T. L., Gepperth, A., Stoian, A., and Filliat, D.
(2019). Marginal replay vs conditional replay for con-
tinual learning. In Tetko, I. V., K
˚
urkov
´
a, V., Karpov,
P., and Theis, F., editors, Artificial Neural Networks
and Machine Learning – ICANN 2019, volume 11728
of Lecture Notes in Computer Science, pages 466–
480, Munich, Germany. Springer.
Liu, X., Wu, C., Menta, M., Herranz, L., Raducanu, B.,
Bagdanov, A. D., Jui, S., and van de Weijer, J. (2020).
Generative feature replay for class-incremental learn-
ing. IEEE, pages 915–924.
Mallya, A. and Lazebnik, S. (2018). Packnet: Adding mul-
tiple tasks to a single network by iterative pruning. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 7765–
7773.
Parisi, G. I., Tani, J., Weber, C., and Wermter, S. (2017).
Lifelong learning of human actions with deep neural
network. Neural Networks, 96:137–149.
Rusu, A. A., Rabinowitz, N. C., Desjardins, G., Soyer,
H., Kirkpatrick, J., Kavukcuoglu, K., Pascanu, R.,
and Hadsell, R. (2016). Progressive neural networks.
CoRR.
Shin, H., Lee, J. K., Kim, J., and Kim, J. (2018). Con-
tinual learning with deep generative replay. In Ben-
gio, S., Wallach, H., Larochelle, H., Grauman, K.,
Cesa-Bianchi, N., and Garnett, R., editors, Advances
in Neural Information Processing Systems 31. Curran
Associates, Inc.
van de Ven, G. M., Siegelmann, H. T., and Tolias, A. S.
(2020). Brain-inspired replay for continual learning-
with artificial neural networks. Nature communica-
tions, 11(4069):1–14.
Yamauchi, K. and Hayami, J. (2007). Incremental learning
and model selection for radial basis function network
through sleep. IEICE TRANSACTIONS on Informa-
tion and Systems, E90-D(4):722–735.
Zenke, F., Poole, B., and Ganguli, S. (2017). Continual
learning through synaptic intelligence. In Proceed-
ings of the 34th International Conference on Machine
Learning, Sydney, Australia, PMLR 70, 2017.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
250
