
Multi-Face Emotion Detection for Effective Human-Robot Interaction
Mohamed Ala Yahyaoui
1
, Mouaad Oujabour
1
, Leila Ben Letaifa
1 a
and Amine Bohi
2 b
1
CESI LINEACT Laboratory, UR 7527, Vandoeuvre-l
`
es-Nancy, 54500, France
2
CESI LINEACT Laboratory, UR 7527, Dijon, 21800, France
Keywords:
Emotion Detection, Facial Expression Recognition, Human-Robot Interaction, Deep Learning, Graphical
User Interface.
Abstract:
The integration of dialogue interfaces in mobile devices has become ubiquitous, providing a wide array of
services. As technology progresses, humanoid robots designed with human-like features to interact effectively
with people are gaining prominence, and the use of advanced human-robot dialogue interfaces is continually
expanding. In this context, emotion recognition plays a crucial role in enhancing human-robot interaction by
enabling robots to understand human intentions. This research proposes a facial emotion detection interface
integrated into a mobile humanoid robot, capable of displaying real-time emotions from multiple individuals
on a user interface. To this end, various deep neural network models for facial expression recognition were
developed and evaluated under consistent computer-based conditions, yielding promising results. Afterwards,
a trade-off between accuracy and memory footprint was carefully considered to effectively implement this
application on a mobile humanoid robot.
1 INTRODUCTION
The rapid advancement of technology in recent years
has accelerated research in robotics, with a particu-
lar emphasis on humanoid robots. Designed to re-
semble humans in body, hands, and head, humanoid
robots are increasingly capable of sophisticated inter-
actions with people, including recognizing individu-
als and responding to commands. This human-like
form and behavior make them particularly well-suited
for applications in human-computer interaction, serv-
ing as effective platforms for studying and improv-
ing user engagement and interaction dynamics. Cur-
rent examples of humanoid robots include Honda’s
ASIMO (Hirose and Ogawa, 2007), known for its ad-
vanced mobility and dexterity; Blue Frog Robotics’
Buddy (Peltier and Fiorini, 2017), designed for so-
cial interaction and domestic assistance; and Alde-
baran Robotics’ NAO (Gouaillier et al., 2009), rec-
ognized for its versatility in research and educational
settings. These robots showcase the diversity of roles
humanoid robots can play, from companionship and
entertainment to education and beyond.
Developing emotional intelligence in robots is rel-
evant as they increasingly participate in social set-
a
https://orcid.org/0000-0002-0474-3229
b
https://orcid.org/0000-0002-2435-3017
tings. Indeed, beyond performing physical tasks, en-
hancing robots’ ability to perceive, interpret and re-
spond to human needs is essential for effective social
Human-Robot Interaction (HRI) and Human-Robot
Collaboration (HRC).
In the realm of social robotics, integrating sen-
sors such as microphone for ”mouth” or camera for
’eyes’ into the humanoid robot, enables the robot to
capture human emotions in real-time, and to adapt its
response and behavior accordingly (Justo et al., 2020;
Olaso et al., 2021; Palmero et al., 2023). This capa-
bility enhances their utility in various applications and
facilitates engagement and intuitive interaction expe-
riences between robots and humans. Detecting emo-
tions from camera starts with face detection, which
involves identifying and locating human faces within
images or video frames. This process includes pre-
processing images, extracting distinct facial features,
classifying regions as faces or non-faces, refining de-
tection accuracy, and handling variations in lighting,
occlusions, poses and scales. Face emotion recog-
nition (FER) employs computer vision and machine
learning techniques to analyze human emotions from
face.
Often, emotion recognition systems deals with
only one user while he is communicating with a ma-
chine. However, multiple users can communicate si-
Yahyaoui, M. A., Oujabour, M., Ben Letaifa, L. and Bohi, A.
Multi-Face Emotion Detection for Effective Human-Robot Interaction.
DOI: 10.5220/0013170300003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 91-99
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
91

multaneously with it. Multi-face emotion recognition
is particularly valuable across various scenarios. For
instance, at a comedy club, it provides real-time feed-
back to comedians, manages lighting and sound, in-
teracts with the audience, and detects disruption.
In this work, we present a complete facial emo-
tion recognition interface and its deployment in a mo-
bile humanoid robot. The proposed interface can dis-
play emotions from multiple individuals in real-time
within an advanced user interface. To achieve this,
several deep neural network models have been devel-
oped and evaluated under the same conditions. Then
a tradeoff between system accuracy and model size
have been considered in order to implement the op-
timal solution into a humanoid robot. The model’s
performance and its confidence interval also guided
this choice of solution.
The remainder of this paper is structured as fol-
lows. Section 2 reviews the state of the art related
to emotion detection for Human-Robot Interaction
(HRI) and Facial Emotion Recognition (FER) sys-
tems. Section 3 presents the design and implemen-
tation of the proposed emotional interface, detailing
the multi-face detection, emotion recognition system,
and the graphical user interface. Section 4 describes
the integration of the facial emotion recognition sys-
tem into the Tiago++ humanoid robot, highlighting
the processes of face tracking and real-time emotion
detection. Section 5 outlines the experimental setup
and presents the results, including performance met-
rics, model comparisons, and user interaction anal-
ysis. Finally, Section 6 concludes the paper with a
discussion of the findings, limitations of the current
approach, and potential directions for future work.
2 RELATED WORK
Although emotions have been investigated in the con-
text of HRI, it remains a significant challenge. In this
section, we report recent research in HRI as well as
FER systems.
2.1 Emotion Detection for HRI
In social robotics, emotion detection is mimicked by
robots to interact naturally and harmoniously with hu-
mans. Several studies have focused on implementing
facial emotion recognition in robots. For instance,
the study (Zhao et al., 2020) applied facial emotion
recognition on three datasets: FER2013, FERPLUS
and FERFIN. The system was implemented on a NAO
robot, which responds with actions based on the de-
tected emotions. However, this study has some limita-
tions, as it does not provide details on the robot’s im-
plementation. Additionally, the research (Dwijayanti
et al., 2022) integrated a facial detection system with a
facial emotion recognition system and implemented it
in a robot. They also explored automatic detection of
the distance between the camera of the robot and the
person. One drawback is that the robot is stationary,
so mobility is not considered. The study (Spezialetti
et al., 2020) serves as a survey of emotion recogni-
tion research for human-robot interaction. It reviews
emotion recognition models, datasets, and modalities,
with a particular emphasis on facial emotion recogni-
tion. However, it does not include any research utiliz-
ing deep learning models for facial emotion recogni-
tion.
2.2 Facial Emotion Recognition
Deep learning has revolutionized computer vision
tasks, including Facial Emotion Recognition (FER),
with numerous studies proposing various methodolo-
gies to achieve high classification accuracy using well
known benchmark datasets (Farhat et al., ; Goodfel-
low et al., 2013; Letaifa et al., 2019; Mollahosseini
et al., 2017; Justo et al., 2021; Lucey et al., 2010).
Several recent studies have proposed innovative
approaches for FER. Farzaneh et al. (Farzaneh
and Qi, 2021) introduced the Deep Attentive Cen-
ter Loss (DACL) method, which integrates an atten-
tion mechanism to enhance feature discrimination,
showing superior performance on RAF-DB and Af-
fectNet datasets. Similarly, Pecoraro et al. (Pec-
oraro et al., 2022) proposed the LHC-Net architec-
ture, which employs a multi-head self-attention mod-
ule tailored for FER tasks, achieving state-of-the-art
results on FER2013 with lower computational com-
plexity. In another work, Han et al. (Han et al., 2022)
presented a triple-structure network model based on
MobileNet V1, which captures inter-class and intra-
class diversity features, demonstrating strong results
on KDEF, MMI, and CK+ datasets. Fard et al. (Fard
and Mahoor, 2022) introduced the Adaptive Correla-
tion (Ad-Corre) Loss, which improved performance
on AffectNet, RAF-DB, and FER2013 datasets when
applied to Xception and ResNet50 models. Other no-
table contributions include the Segmentation VGG-19
model (Vignesh et al., 2023), which enhanced FER
on FER2013 using segmentation-inspired blocks, and
the DDAMFN network by Zhang et al. (Zhang et al.,
2023), which incorporated dual-direction attention to
achieve excellent results on AffectNet and FERPlus.
Lastly, in our recent work, we introduced EmoNeXt
(El Boudouri and Bohi, 2023), a deep learning frame-
work that has set new state-of-the-art benchmarks on
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
92
the FER2013 dataset. EmoNeXt integrates a Spa-
tial Transformer Network (STN) for handling fa-
cial alignment variations, along with Squeeze-and-
Excitation (SE) blocks for channel-wise feature recal-
ibration. Additionally, a self-attention regularization
term was introduced to enhance compact feature gen-
eration, further improving accuracy.
This brief review shows that many FER models
have focused exclusively on improving accuracy. As
a result, today’s leading models can reach memory
sizes in the order of gigabytes, which poses chal-
lenges for deployment in memory-constrained envi-
ronments, such as the robots.
3 THE EMOTIONAL INTERFACE
One of the challenges in the domain of emotion
detection for HRI, is the simultaneous detection of
emotions from multiple faces, which is useful where
robots interact with groups of people.
3.1 Multi-Face Detection
We choose the Haarcascade classifier, proposed by
Paul Viola and Michael Jones in their seminal paper
(Viola and Jones, 2001), as a highly effective method
for face detection. Other notable methods include the
Histogram of Oriented Gradients (HOG) combined
with Support Vector Machines (SVM) and deep learn-
ing approaches such as the Multi-task Cascaded Con-
volutional Networks (MTCNN). While these meth-
ods have shown promising results in various applica-
tions, the Haarcascade classifier is particularly advan-
tageous for real-time scenarios.
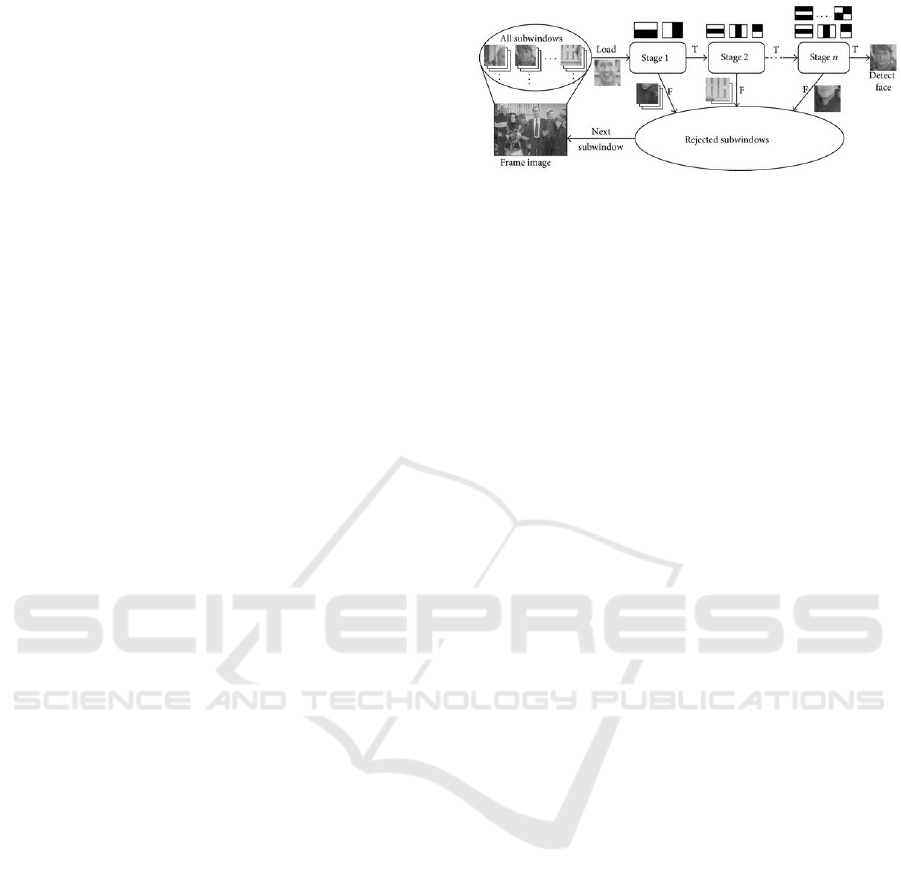
The general principle of the Haarcascade ap-
proach is illustrated in Figure 1. This machine
learning-based method involves training a cascade
function using a large dataset of positive (face) and
negative (non-face) images. The classifier relies on
Haar features, which are similar to convolutional ker-
nels, to extract distinguishing characteristics from im-
ages. Each Haar feature is a single value calculated by
subtracting the sum of pixels under a white rectangle
from the sum of pixels under a black rectangle. To
efficiently compute these features, the concept of in-
tegral images is utilized, reducing the calculation to
an operation involving just four pixels, regardless of
the feature’s size.
During training, all possible sizes and positions of
these features are applied to the training images, re-
sulting in over 160,000 potential features. To select
the most relevant features, the AdaBoost algorithm is
utilized, which iteratively adjusts the weights of mis-
Figure 1: Cascade structure for Haar classifiers (Kim et al.,
2015).
classified images and selects features with the lowest
error rates, thereby creating a strong classifier from a
combination of weak classifiers. Despite the high ini-
tial number of features, this process narrows it down
significantly (e.g., from 160,000 to around 6,000).
For detection, the image is scanned with a 24x24
pixel window, applying these selected features. To en-
hance efficiency, the authors introduced a cascade of
classifiers. This means that features are grouped into
stages, and if a window fails at any stage, it is imme-
diately discarded as a non-face region. This hierarchi-
cal approach ensures that only potential face regions
undergo the full, more complex evaluation process,
allowing for real-time face detection with high accu-
racy.
3.2 Emotion Recognition System
Pretrained deep learning models have demonstrated
exceptional effectiveness for feature extraction across
various domains (Palmero et al., 2023). In our
emotion recognition system (Figure. 2), we lever-
age a pretrained convolutional neural network (CNN)
model to apply transfer learning using the FER2013
dataset (Goodfellow et al., 2013). Specifically, we uti-
lize pretrained CNN models, initially trained on the
ImageNet dataset which encompass millions of im-
ages from various categories (Deng et al., 2009). This
extensive training enables these models to extract
highly relevant and general visual features through
their convolutional layers. These layers detect funda-
mental elements such as edges, textures, and shapes,
which are essential for understanding facial struc-
tures. We utilize these convolutional layers to pro-
cess our input images, leaving out the top portion of
the model, specifically the fully connected layers ini-
tially designed for the ImageNet classification tasks.
Instead, by passing our facial images through the pre-
trained model’s convolutional layers, we generate a
feature stack that encapsulates essential visual infor-
mation. This feature stack, representing a rich set of
features extracted from the images, is then flattened
into a format suitable for further processing. Subse-
quently, we introduce additional fully connected lay-
Multi-Face Emotion Detection for Effective Human-Robot Interaction
93
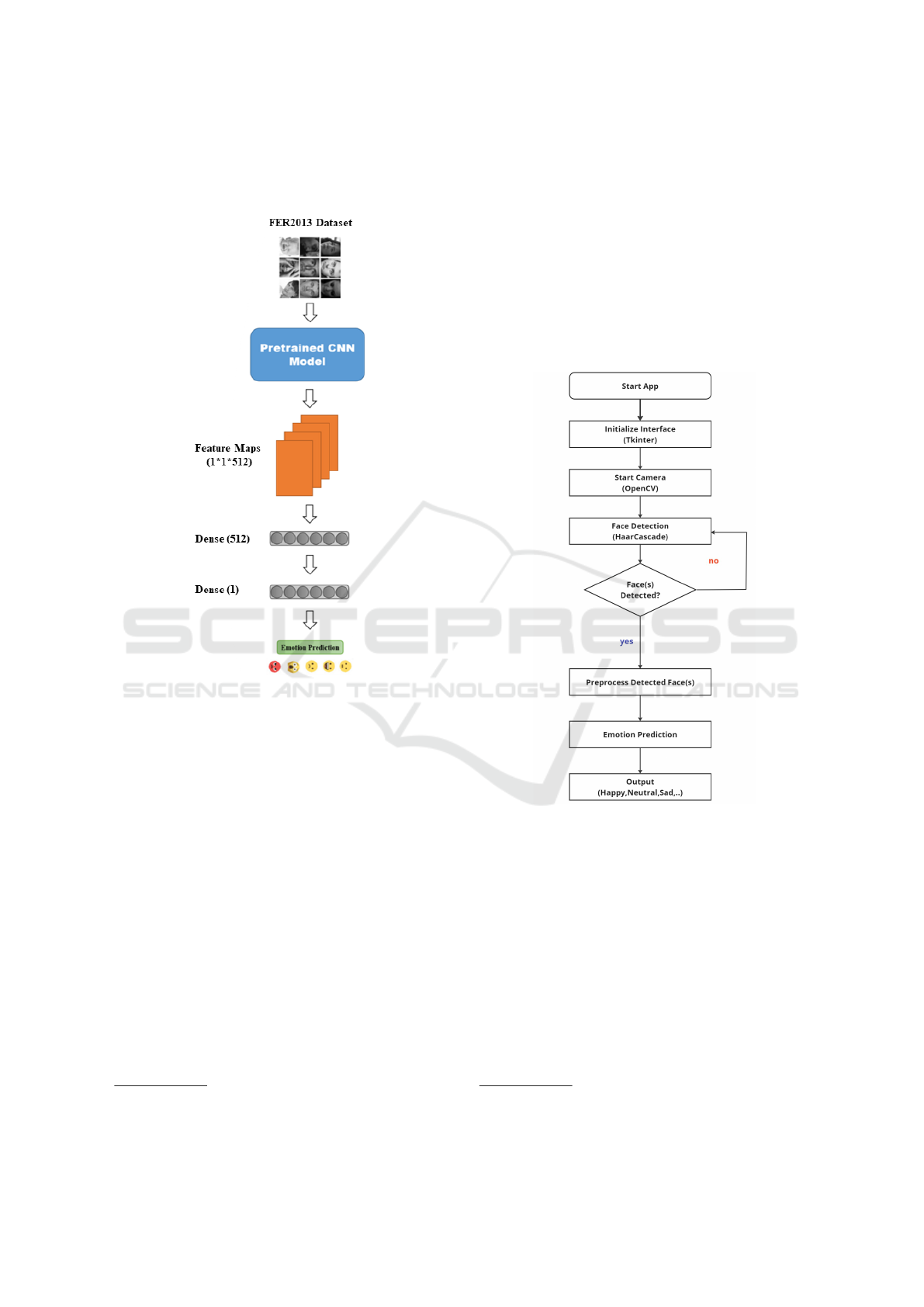
ers tailored to the FER2013 dataset to recognize and
classify seven distinct emotions: anger, disgust, fear,
happiness, sadness, surprise, and neutrality.
Figure 2: The architecture of the emotion recognition sys-
tem using transfer learning on the FER2013 dataset.
These newly added layers are trained to fine-tune
the model specifically for emotion recognition, lever-
aging the robust feature extraction capabilities of the
pretrained model’s convolutional layers.
3.3 Graphical Interface
The graphical interface of our emotion recognition
system integrates multiple advanced technologies to
provide a seamless and responsive user experience.
Upon launching the application, the interface is built
using the Tkinter library
1
, creating a user-friendly
graphical environment. The system activates the we-
bcam through the OpenCV library
2
, capturing a live
video feed for real-time analysis. Captured video
frames undergo face detection using the HaarCascade
classifier, a robust method for identifying faces under
various lighting conditions and angles (see descrip-
tion in subsection 3.1).
1
https://docs.python.org/3/library/tkinter.html
2
https://docs.opencv.org/4.x/
Once a face is detected, the region of interest is ex-
tracted and subjected to preprocessing to ensure com-
patibility with the model’s input size. The processed
image is then fed into a pretrained CNN model that
have been fine-tuned on the FER2013 dataset. This
model analyzes the facial image to predict the user’s
emotional state, categorizing it into distinct emotions
such as anger, fear, disgust, happiness, sadness, sur-
prise, and neutrality. The predicted emotion is then
displayed on the graphical interface, providing imme-
diate feedback to the user. All these steps are illus-
trated by Fig. 3.
Figure 3: Global architecture of our real-time multi-face
emotion recognition user interface.
4 THE HUMANOID ROBOT
The Tiago robot, developed by PAL Robotics (Pages
et al., ), is a humanoid mobile robot
3
. Its modular de-
sign allows for customization to meet specific needs.
In this section, we outline our approach to equipping
the Tiago++ model of the robot with face emotion
recognition capabilities. By using the Robot Oper-
ating System (ROS)
4
for communication and process-
ing, and integrating a Tkinter-based GUI for real-time
visualization, we enhance the ability of the robot to
3
https://pal-robotics.com/robots/tiago/
4
https://wiki.ros.org
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
94

interact with humans. This implementation is divided
into two primary tasks: face tracking and emotion de-
tection, each described in the following subsections.
4.1 Face Tracking Integration on
Tiago++ Robot
We implemented a face tracking module on the
Tiago robot by integrating ROS with a Tkinter-
based GUI application. The process begins with
initializing a ROS node named Tiago FER and set-
ting up essential publishers and subscribers to fa-
cilitate communication between the robot and the
software. We use the CvBridge
5
library to con-
vert images from ROS format to OpenCV format.
Meanwhile, the MediaPipeRos instance processes
these images to detect regions of interest (ROI)
for face tracking. The application’s main loop re-
ceives images from the robot’s camera through the
/xtion/rgb/image ROS topic, processes these im-
ages to detect faces, and generates commands to ad-
just the robot’s yaw and pitch. These commands,
which control head movements, are published to the
head controller/increment/goal topic using the
IncrementActionGoal message type, enabling the
robot to track the detected faces. These steps are out-
lined in the diagram generated by ROS, as shown in
Figure 4.
4.2 Emotion Detection and GUI Display
on Tiago++ Screen
Following face tracking, the processed images are
analyzed to predict emotions. The detected emo-
tions are displayed on a Tkinter GUI, which fea-
tures a canvas for image display and progress bars
to visualize emotion scores. The processed im-
ages and emotion data are published back to the
/imagesBack ROS topic. Additionally, incremen-
tal commands for torso movements are sent to the
/torso controller/safe command topic using the
JointTrajectory message type, allowing the robot
to dynamically respond to detected emotions (see Fig-
ure 4.
5 EXPERIMENTS AND RESULTS
Developing a human-robot interface for FER involves
detecting faces and emotions, implementing the user
interface, and integrating it into the robot platform.
5
https://wiki.ros.org/cv bridge/Tutorials
The robot’s camera captures images of individuals
interacting with it, processes these images to detect
emotions, and then displays the detected emotions on
the user interface. This interface is visible on the
tablet mounted on the robot’s chest. Several chal-
lenges are to be addressed, particularly focusing on
the accuracy of the models and the feasibility of im-
plementing them on the robot.
5.1 Face Emotion Detection
In this work, we fine-tuned several pretrained mod-
els from the Keras library
6
, initially trained on the
ImageNet 1000K dataset. These models were se-
lected based on their strong performance in the Im-
ageNet classification task and their ability to general-
ize well for FER tasks. We applied transfer learning,
as explained in subsection 3.2, to the following mod-
els: MobileNet (Howard et al., 2017), DenseNet201
(Huang et al., 2017), ResNet152V2 (He et al., 2016b),
ResNet101 (He et al., 2016a), Xception (Chollet,
2017), EfficientNetV2-B0 (Tan and Le, 2021), In-
ceptionResNetV2 and InceptionV3 (Szegedy et al.,
2017), VGG16 and VGG19 (Karen, 2014), and Con-
vNeXt (from Tiny to XLarge version) (Liu et al., ).
For training, we consistently used data augmenta-
tion techniques such as rotation, shift, zoom, horizon-
tal flip and adjustments in brightness and contrast to
improve the model’s robustness. Additionally, Ran-
dom Erasing was used to simulate occlusions, while
resizing and recropping variations improved robust-
ness to differences in face positioning. The models
were optimized using Adam with a learning rate of
0.0001, combined with strategies like EarlyStopping
and ReduceLROnPlateau to prevent overfitting and
dynamically adjust the learning rate.
The accuracy and memory footprint of each fine-
tuned model on the FER2013 dataset are reported in
Table 1. While ConvNeXt XLarge achieved the high-
est accuracy at 72.27%, it comes with a significantly
larger memory footprint than the other models.
5.2 Confidence Interval
Accuracy is an estimate of the performance of a sys-
tem, and its reliability depends on the number of tests
conducted that is in our case the number of emotions
to be recognized. The measurement of the confidence
interval is introduced to assess the trustability of our
recognition rate. In (Zouari, 2007), the successes are
modeled by a binomial distribution. If N is the num-
ber of tests and P is the recognition rate, then the con-
fidence interval [P-, P+] at x% is:
6
https://keras.io/api/applications/
Multi-Face Emotion Detection for Effective Human-Robot Interaction
95
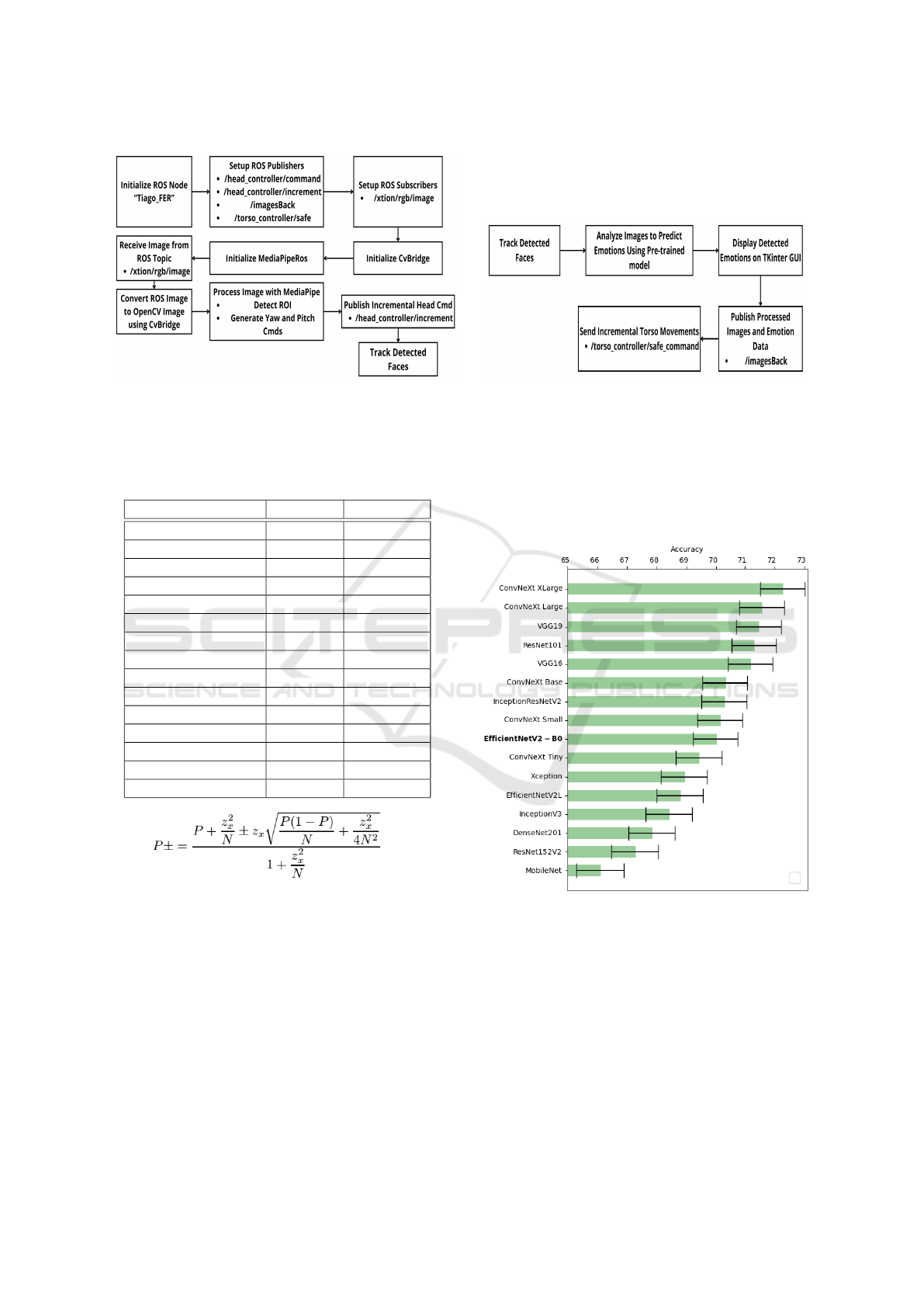
(a) Face tracking integration on Tiago++ robot. (b) Emotion detection and GUI display on Tiago++ robot.
Figure 4: ROS-based Tiago++ face emotion recognition integration process: the diagram in the left (a) depicts the steps
involved in face tracking integration, while the diagram in the right (b) shows the emotion detection and GUI display process.
Table 1: Pretrained models fine-tuned on the FER2013
dataset: accuracy (%) and memory footprint (Megabytes).
Model name Accuracy Model size
MobileNet 66.11 14.5
ResNet152V2 67.28 611.3
DenseNet201 67.84 221.0
InceptionV3 68.43 268.6
Xception 68.93 346.9
ConvNeXt Tiny 69.43 362
EfficientNetV2-B0 70.00 139.0
ConvNeXt Small 70.15 566
InceptionResNetV2 70.29 648.2
ConvNeXt Base 70.32 1120
VGG16 71.18 171.0
ResNet101 71.30 549.8
VGG19 71.46 262.5
ConvNeXt Large 71.57 2733
ConvNeXt XLarge 72.27 3900
with z95% = 1.96 and z98% = 2.33. This means that
there is a x% chance that the rate falls within the in-
terval [P-, P+].
The FER2013 dataset consists in 35,887 grayscale
images, divided into training (80%), test (10%) and
validation (10%). Hence, using each model 3589
samples have been evaluated on the test set. We com-
pute the confidence interval with z98 for all mod-
els and report the results in Figure 5. We notice
that several models, including VGG16, Inception-
ResNetV2, ConvNeXt Base, EfficientNetV2-B0, and
VGG19, show overlapping results. In terms of pre-
cision, these models demonstrate similar efficiency.
However, there is a notable difference in their sizes,
with EfficientNetV2-B0 being the most compact. Due
to its smaller size, EfficientNetV2-B0 has been cho-
sen for implementation on the robot.
Figure 5: Accuracy and confidence intervals of the models.
5.3 User Interface Development
Our emotion recognition application features an in-
tuitive and user-friendly graphical interface designed
for both single-face and multi-face emotion detec-
tion. The interface allows users to utilize their de-
vice’s camera to capture live video streams, which
are then processed in real-time to detect and classify
facial expressions. For single-face emotion recogni-
tion, the application highlights the detected face and
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
96

displays the identified emotion with corresponding
confidence levels. In multi-face scenarios, the inter-
face efficiently detects multiple faces within the same
frame, assigning emotions to each detected face in-
dividually. The results are visually presented using
bounding boxes and emotion labels directly on the
video feed, providing clear and immediate feedback.
Figure 6: The user interface displays face and emotion de-
tection for a single person. Progress bars indicate the confi-
dence score for each recognized emotion.
Additionally, the interface includes progress bars
for the detected emotion, visually representing the
confidence level of each prediction. An avatar further
enhances user interaction by imitating the predicted
emotion in real-time, offering an engaging and dy-
namic way to understand the results. This comprehen-
sive and interactive interface ensures that users can
easily interpret the emotion detection outcomes, mak-
ing the application practical for various real-world
settings, including human-robot interaction and affec-
tive computing. Figure. 6 and Figure. 7 show some
examples of the user interface applied to single and
multi-face emotion detection.
5.4 FER Deployment on Tiago++ Robot
The Tiago++ is a humanoid mobile robot with con-
strained resources (CPU, memory, and storage). Be-
sides interacting with humans, the robot must concur-
Figure 7: Face detection is followed by emotion detection
for multiple individuals present in the same image.
rently perform critical tasks such as navigation and
detection, which are also resource-intensive. Conse-
quently, for deploying our application on the Tiago++
robot, it is essential to select a model not only based
on its test accuracy but also on the memory footprint
of the model. The Tiago++ robot has a maximum ca-
pacity of about 150 MB for model files to ensure real-
time inference without disrupting other processes run-
ning on the robot. According to Table 1 and the previ-
ous subsection, EfficientNetV2-B0 stands out with a
good balance between accuracy (70.00%) and model
size (139 MB), meeting the robot’s constraints.
To illustrate the system’s effectiveness, we con-
ducted two sets of experiments. In the first set, a sin-
gle participant interacted with the robot, displaying
a range of emotions. The system’s ability to accu-
rately detect the face and classify the emotional state
of the participant in real-time was meticulously ob-
served and documented. In the second set, two partic-
ipants were present simultaneously, engaging in var-
ious interactions with the robot. This scenario tested
the system’s robustness in detecting multiple faces
and correctly identifying each individual’s emotional
state in real-time. The results of these experiments
are depicted through a series of images captured dur-
ing the interactions on Figure. 8.
6 CONCLUSIONS
In this paper, we presented a facial emotion detection
interface implemented on a mobile humanoid robot.
This interface is capable of displaying emotions from
multiple individuals in real-time video. To achieve
Multi-Face Emotion Detection for Effective Human-Robot Interaction
97

Figure 8: Multi face emotion detection deployed on robot
this, we developed and evaluated several deep neu-
ral network models under consistent conditions, care-
fully considering factors such as model size and accu-
racy to ensure compatibility with both personal com-
puters and mobile robots like the Tiago++.
While our system demonstrates strong perfor-
mance, it is important to note the limitations of rely-
ing solely on facial expressions for emotion detection,
particularly in contexts where communication may be
impaired. Emotions are complex and multifaceted,
often requiring the integration of multiple modali-
ties for more accurate recognition. Therefore, future
work will focus on incorporating additional modali-
ties, such as voice, text, gestures, and biosignals, to
enhance the performance and reliability of emotion
recognition systems. Additionally, we will focus on
optimizing large models used in FER tasks to ensure
their efficiency for deployment on the Tiago++ robot,
considering the balance between model size and ac-
curacy.
REFERENCES
Chollet, F. (2017). Xception: Deep learning with depthwise
separable convolutions. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1251–1258.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In 2009 IEEE conference on computer vi-
sion and pattern recognition, pages 248–255.
Dwijayanti, S., Iqbal, M., and Suprapto, B. Y. (2022). Real-
time implementation of face recognition and emotion
recognition in a humanoid robot using a convolutional
neural network. IEEE Access, 10:89876–89886.
El Boudouri, Y. and Bohi, A. (2023). Emonext: an adapted
convnext for facial emotion recognition. In 2023 IEEE
25th International Workshop on Multimedia Signal
Processing (MMSP), pages 1–6. IEEE.
Fard, A. P. and Mahoor, M. H. (2022). Ad-corre: Adap-
tive correlation-based loss for facial expression recog-
nition in the wild. IEEE Access, 10:26756–26768.
Farhat, N., Bohi, A., Letaifa, L. B., and Slama, R. Cg-
mer: a card game-based multimodal dataset for emo-
tion recognition. In Sixteenth International Confer-
ence on Machine Vision (ICMV 2023).
Farzaneh, A. H. and Qi, X. (2021). Facial expression recog-
nition in the wild via deep attentive center loss. In
Proceedings of the IEEE/CVF winter conference on
applications of computer vision, pages 2402–2411.
Goodfellow, I. J., Erhan, D., Carrier, P. L., Courville, A.,
Mirza, M., Hamner, B., Cukierski, W., Tang, Y.,
Thaler, D., Lee, D.-H., et al. (2013). Challenges in
representation learning: A report on three machine
learning contests. In Neural information processing.
20th international conference, ICONIP. Springer.
Gouaillier, D., Hugel, V., Blazevic, P., and Kilner, C.
(2009). Mechatronic design of nao humanoid. In
IEEE International Conference on Robotics and Au-
tomation ICRA.
Han, B., Hu, M., Wang, X., and Ren, F. (2022). A triple-
structure network model based upon mobilenet v1 and
multi-loss function for facial expression recognition.
Symmetry, 14(10):2055.
He, K., Zhang, X., Ren, S., and Sun, J. (2016a). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
He, K., Zhang, X., Ren, S., and Sun, J. (2016b). Iden-
tity mappings in deep residual networks. In Computer
Vision–ECCV 2016: 14th European Conference, Am-
sterdam, The Netherlands, October 11–14, 2016, Pro-
ceedings, Part IV 14, pages 630–645. Springer.
Hirose, M. and Ogawa, K. (2007). Honda humanoid robots
development. Philosophical Transactions of the Royal
Society A: Mathematical, Physical and Engineering
Sciences, 365(1850):11–19.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely connected convolutional net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition.
Justo, R., Letaifa, L. B., Olaso, J. M., L
´
opez-Zorrilla, A.,
Develasco, M., V
´
azquez, A., and Torres, M. I. (2021).
A spanish corpus for talking to the elderly. Conversa-
tional Dialogue Systems for the Next Decade.
Justo, R., Letaifa, L. B., Palmero, C., Fraile, E. G., Jo-
hansen, A., Vazquez, A., Cordasco, G., Schlogl, S.,
Ruanova, B. F., Silva, M., Escalera, S., Velasco,
M. D., Laranga, J. T., Esposito, A., Kornes, M., and
Torres, M. I. (2020). Analysis of the interaction be-
tween elderly people and a simulated virtual coach.
Journal of Ambient Intelligence and Humanized Com-
puting, 11:6125–6140.
Karen, S. (2014). Very deep convolutional networks for
large-scale image recognition. arXiv preprint arXiv:
1409.1556.
Kim, M., Lee, D., and Kim, K.-Y. (2015). System archi-
tecture for real-time face detection on analog video
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
98

camera. International Journal of Distributed Sensor
Networks, 11(5):251386.
Letaifa, L. B., Develasco, M., Justo, R., and Torres, M. I.
(2019). First steps to develop a corpus of interac-
tions between elderly and virtual agents in spanish
with emotion. In International Conference on Statis-
tical Language and Speech Processing.
Liu, Z., Mao, H., Wu, C.-Y., Feichtenhofer, C., Darrell, T.,
and Xie, S. A convnet for the 2020s. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition.
Lucey, P., Cohn, J. F., Kanade, T., Saragih, J., Ambadar,
Z., and Matthews, I. (2010). The extended cohn-
kanade dataset (ck+): A complete dataset for action
unit and emotion-specified expression. In 2010 ieee
computer society conference on computer vision and
pattern recognition-workshops, pages 94–101. IEEE.
Mollahosseini, A., Hasani, B., and Mahoor, M. H. (2017).
Affectnet: A database for facial expression, valence,
and arousal computing in the wild. IEEE Transactions
on Affective Computing, 10(1):18–31.
Olaso, J., V
´
azquez, A., Letaifa, L. B., de Velasco, M.,
Mtibaa, A., Hmani, M. A., Petrovska-Delacr
´
etaz, D.,
Chollet, G., Montenegro, C., L
´
opez-Zorrilla, A., et al.
(2021). The empathic virtual coach: a demo. In The
2021 International Conference on Multimodal Inter-
action (ICMI’21), pages 848–851. ACM.
Pages, J., Marchionni, L., and Ferro, F. Tiago: the mod-
ular robot that adapts to different research needs. In
International workshop on robot modularity, IROS.
Palmero, C., DeVelasco, M., Hmani, A., Mtibaa, M. A.,
Letaifa, L. B., et al. (2023). Exploring emotion ex-
pression recognition in older adults interacting with a
virtual coach. arXiv preprint arXiv:2311.05567.
Pecoraro, R., Basile, V., and Bono, V. (2022). Local
multi-head channel self-attention for facial expression
recognition. Information, 13(9):419.
Peltier, A. and Fiorini, L. (2017). Buddy: A companion
robot for living assistance. Journal of Robotics and
Automation, 3(2):75–81.
Spezialetti, M., Placidi, G., and Rossi, S. (2020). Emotion
recognition for human-robot interaction: Recent ad-
vances and future perspectives. Frontiers in Robotics
and AI, 7:145.
Szegedy, C., Ioffe, S., Vanhoucke, V., and Alemi, A. (2017).
Inception-v4, inception-resnet and the impact of resid-
ual connections on learning. In Proceedings of the
AAAI conference on artificial intelligence, volume 31.
Tan, M. and Le, Q. (2021). Efficientnetv2: Smaller mod-
els and faster training. In International conference on
machine learning, pages 10096–10106. PMLR.
Vignesh, S., Savithadevi, M., Sridevi, M., and Sridhar, R.
(2023). A novel facial emotion recognition model us-
ing segmentation vgg-19 architecture. International
Journal of Information Technology, pages 1–11.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Proceedings
of the IEEE computer society conference on computer
vision and pattern recognition. CVPR.
Zhang, S., Zhang, Y., Zhang, Y., Wang, Y., and Song, Z.
(2023). A dual-direction attention mixed feature net-
work for facial expression recognition. Electronics,
12(17):3595.
Zhao, G., Yang, H., Tao, Y., Zhang, L., and and, C. Z.
(2020). Lightweight cnn-based expression recognition
on humanoid robot. KSII Transactions on Internet and
Information Systems, 14(3):1188–1203.
Zouari, L. (2007). Vers le temps r
´
eel en transcription au-
tomatique de la parole grand vocabulaire. PhD thesis,
T
´
el
´
ecom ParisTech.
Multi-Face Emotion Detection for Effective Human-Robot Interaction
99
