
Markov Process-Based Graph Convolutional Networks for Entity
Classification in Knowledge Graphs
Johannes M
¨
akelburg
1∗ a
, Yiwen Peng
2∗ b
, Mehwish Alam
2 c
, Tobias Weller
3
and Maribel Acosta
1 d
1
School of CIT, Technical University of Munich, Germany
2
T
´
el
´
ecom Paris, Institut Polytechnique de Paris, France
3
Independent Researcher, Germany
Keywords:
Entity Classification, Graph Convolutional Network, Markov Process, Evidential Learning, Knowledge Graph.
Abstract:
Despite the vast amount of information encoded in Knowledge Graphs (KGs), information about the class
affiliation of entities remains often incomplete. Graph Convolutional Networks (GCNs) have been shown
to be effective predictors of complete information about the class affiliation of entities in KGs. However,
these models do not learn the class affiliation of entities in KGs incorporating the complexity of the task,
which negatively affects the models’ prediction capabilities. To address this problem, we introduce a Markov
process-based architecture into well-known GCN architectures. This end-to-end network learns the prediction
of class affiliation of entities in KGs within a Markov process. The number of computational steps is learned
during training using a geometric distribution. At the same time, the loss function combines insights from the
field of evidential learning. The experiments show a performance improvement over existing models in several
studied architectures and datasets. Based on the chosen hyperparameters for the geometric distribution, the
expected number of computation steps can be adjusted to improve efficiency and accuracy during training.
1 INTRODUCTION
Knowledge Graphs (KGs) encode factual knowledge
in the form of triples (subject-relation-object) and
have emerged as a compelling abstraction for orga-
nizing semi-structured data, capturing relationships
among entities. The facts available in KGs are
used in many application areas such as recommenda-
tion (Wang et al., 2019), information retrieval (Xiong
and Callan, 2015), and question answering (Yasunaga
et al., 2021) for improving the performance of these
systems by providing background or auxiliary infor-
mation. This relevance imposes a significant impor-
tance on a KG providing comprehensive information
about the encoded entities. In particular, encoding
knowledge about the class affiliation of entities is of
great importance for automatic reasoning and infer-
encing of information contained in a KG. Despite the
a
https://orcid.org/0009-0001-3821-7817
b
https://orcid.org/0009-0007-7902-4097
c
https://orcid.org/0000-0002-7867-6612
d
https://orcid.org/0000-0002-1209-2868
*
These authors contributed equally to this work.
enormous effort made to keep the knowledge encoded
in the KGs up-to-date and consistent (Heist et al.,
2020), KGs are often incomplete majorly due to au-
tomated constructions of KGs. To complete missing
knowledge, in particular missing class affiliation of
entities in KGs, various methods based on machine
learning have been introduced (Bordes et al., 2013a;
Kipf and Welling, 2016). Neural networks, especially
Graph Convolutional Neural Networks (GCNs), have
proven to be very effective in completing class affil-
iation of entities in KGs (Schlichtkrull et al., 2018).
However, in neural network based methods, the com-
putation cost grows with the size of the input data, but
not with the complexity of the problem being learned.
In recent developments in automated machine learn-
ing, models perform conditional computation based
on probabilistic variables that are used to dynamically
adjust the number of computation steps (Banino et al.,
2021). The adjustment of the computational budget,
in particular the computation steps, is known as pon-
dering. Yet, existing graph-based machine learning
algorithms do not consider the complexity of the task
to adjust the number of computation steps to learn
the parameters. We address this issue and introduce
Mäkelburg, J., Peng, Y., Alam, M., Weller, T. and Acosta, M.
Markov Process-Based Graph Convolutional Networks for Entity Classification in Knowledge Graphs.
DOI: 10.5220/0013172300003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 429-440
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
429

a GCN-based model that learns to adapt the amount
of computational steps based on the task at hand.
In this work, we propose Markov Process and
Evidential with Regularization Loss (MPERL) that
builds upon the previous idea of dynamically ad-
justing the number of computational steps based on
the input of the model. We introduce an end-to-end
Graph Convolutional Network (GCN) model that is
learned within a Markov process and use recent de-
velopments in the field of evidential learning (Sen-
soy et al., 2018; Amini et al., 2020). Previous work
has demonstrated the high performance of evidence-
based models. Unlike models using a softmax func-
tion, evidence-based models are effective predictors
that do not make overconfident predictions. We there-
fore follow an evidence-based approach as well. The
Markov process in which the model is learned con-
sists of two states: (i) the continue state, indicating
further computational steps, and (ii) the halt state, in-
dicating the end of the computational steps. The over-
all probability of halting at each step is modeled as a
geometric distribution. Unlike previous work for en-
tity classification in KGs, MPERL is a graph-based
model that dynamically adjusts the number of compu-
tational steps according to complexity. MPERL fur-
ther shows its feasibility on the task of entity type pre-
diction, i.e., inferring the knowledge about the class
affiliation of an entity. In the rest of this paper, we
are treating entity type prediction as a classification
task where we perform single-label classification for
smaller datasets (specifically designed for this pur-
pose) and multi-label classification on larger datasets.
The experimental results show that MPERL (GCN
with markov process and evidential loss) outperforms
vanilla GCN as well as various other baselines. The
ablation studies show that the use of both markov
process and the evidential learning loss provide sig-
nificant increase in the performance of the MPERL.
Overall our paper makes the following contributions:
• We introduce a Graph Convolutional Network
based model trained within a Markov process, us-
ing an evidential loss function.
• We demonstrate the performance of the model in
predicting missing class affiliations of entities us-
ing single- and multi-label classification.
• We show the effect on the model when adapting
the number of computational or Markov steps.
• We show the effectiveness of each of the compo-
nents of the model on the overall results with the
help of an ablation study.
The paper is structured as follows: Section 2
discusses the recent works related to representation
learning over KGs for entity classification. Section 3
details the proposed approach while Section 4 shows
the effectiveness of MPERL with the help of thorough
experimentation over various sizes of the datasets as
well as the ablation study. Finally, Section 5 con-
cludes the study and discusses future directions.
2 RELATED WORK
Different learning approaches have been applied
to the problem of entity classification in KGs.
Relational Graph Convolutional Networks (R-
GCN) (Schlichtkrull et al., 2018) uses the structure
of KGs to generate embeddings based on local neigh-
bors in order to predict classes (Kipf and Welling,
2016; Hamilton et al., 2017). Due to their strong
performance on graph-structured data, GCN models
have been particularly used and extended in recent
years to tackle entity classification (Schlichtkrull
et al., 2018; Chen et al., 2019; Zangari et al., 2021),
relation classification (Long et al., 2021), and KG
alignment (Berrendorf et al., 2020; Wang et al.,
2018). Gated Relational Graph Neural Network
(GRGNN) (Chen et al., 2019) introduced a gate
mechanism to leverage hidden states of current
node and its neighbors to target entity classifica-
tion problem in KGs. Whereas Relational Graph
Attention Networks (Busbridge et al., 2019) and
Multilayer Graph Attention Network (Zangari et al.,
2021) use masked self-attentional layers to learn the
weighting factor of neighboring node’s features and
were extended with intra- and inter-layer connections
between nodes. Evidential Relational-Graph Convo-
lutional Networks (E-R-GCN) (Weller and Paulheim,
2021) extend R-GCN (Schlichtkrull et al., 2018)
with an evidential loss to represent the predictions
of the model as a distribution over possible softmax
outputs and estimate the associated evidence to learn
both aleatory and epistemic uncertainty in entity
classification. In contrast to these approaches, our
work also implements a Markov process to learn
the model. Moreover, translational KG embeddings
(e.g, TransE (Bordes et al., 2013a) and extensions)
and factorization-based KG embeddings (e.g., Dist-
Mult (Yang et al., 2015) and RESCAL (Nickel
et al., 2011)) have been proposed. In general, these
embeddings are particularly effective for link pre-
diction, but less for entity classification (Dong et al.,
2019). TransET (Wang et al., 2021) is an extension
of TransE (Bordes et al., 2013a) that implements a
convolution-based projection of entities into a type-
specific representation to address entity classification.
ConnectE (Zhao et al., 2020) is also a translational-
based approach that learns two distinct embedding
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
430

models of the entities and connects them via a joint
model to predict entity types. Ridle (Weller and
Acosta, 2021) computes a distribution over the use of
relations of entities using a stochastic factorization
model. Besides translational and factorization-based
embeddings, RDF2Vec (Ristoski and Paulheim,
2016) generates a sequence of nodes using random
walks and Weisfeiler-Lehman subtree RDF graph ker-
nels that are passed to Word2Vec language model for
learning low-dimensional numerical representations
of entities. The learned embeddings preserve similar
entities closer in the vector space, which makes
RDF2Vec suitable for entity classification (Sofronova
et al., 2020; Biswas et al., 2018; Kejriwal and
Szekely, 2017). Our solution differs from these
approaches in the combination of evidential learning
with a Markov process. This allows our approach
to learn embeddings tailored to entity classification
while adjusting the number of computational steps
according to the complexity of the task at hand.
Other KG representations for entity classification
have also been proposed which utilize semantic infor-
mation related to an entity. Cat2Type (Biswas et al.,
2021) creates representations for entities based on the
textual information available in the Wikipedia cate-
gory names using language models and the category
network information. In addition to textual informa-
tion related to entities, GRAND (Biswas et al., 2022)
uses several kinds of graphs such as entity based, rela-
tion based, and random walks for considering the str-
cutured contextual information of an entity. In (Riaz
et al., 2023), the authors perform entity typing based
only on the labels as well as descriptions of the en-
tities using BERT-based models. These approaches
can only be applied to KGs where class affiliation
can be predicted by the relation distribution (Weller
and Acosta, 2021) or where additional semantic in-
formation is available. Relational aggregation graph
attention network (RACE2T) (Zou et al., 2022) pro-
poses a method consisting of an encoder which con-
sists of the attention coefficient between entities fur-
ther used to aggregate the information of relations and
entities in the neighborhood of the entity. The decoder
is based on a convolutional neural network. Lastly,
ASSET (Zahera et al., 2021) is a semi-supervised ap-
proach that learns from massive unlabeled data for en-
tity classification. Compared to our work and the re-
lated work above, ASSET does not learn embeddings
itself, but uses existing ConnectE (Zhao et al., 2020)
embeddings learned beforehand on the KG.
3 OUR APPROACH: MPERL
In this section, we introduce our method Markov
Process and Evidential with Regularization Loss
(MPERL), that extends current Graph Convolutional
Networks (GCN) to perform entity classification in
KGs. For this purpose, we first introduce the defi-
nition of a KG and the associated research problem.
Definition 1. A Knowledge Graph K G is a tuple
(E,R , L,C), where the pair-wise disjoint sets E, R ,
L, and C correspond to the set of entities, relations,
literals, and types or classes, respectively. A state-
ment in K G is modelled as a triple (s,r, o), with
s ∈ E ∪ R ∪ C , r ∈ R , and o ∈ E ∪ R ∪ L ∪ C .
The problem of entity classification in a K G is
to predict statements (e,r,C) that should be in K G,
where e ∈ E, r ∈ R denotes the class affiliation rela-
tionship, and C ∈ C is a class. To address this prob-
lem, we present both the architecture and the learning
process of MPERL in Section 3.1. In Section 3.2, the
loss function for learning the parameters of the model
is presented.
3.1 Markov Process Extensions for
Entity Classification
Overview. We model the entity classification prob-
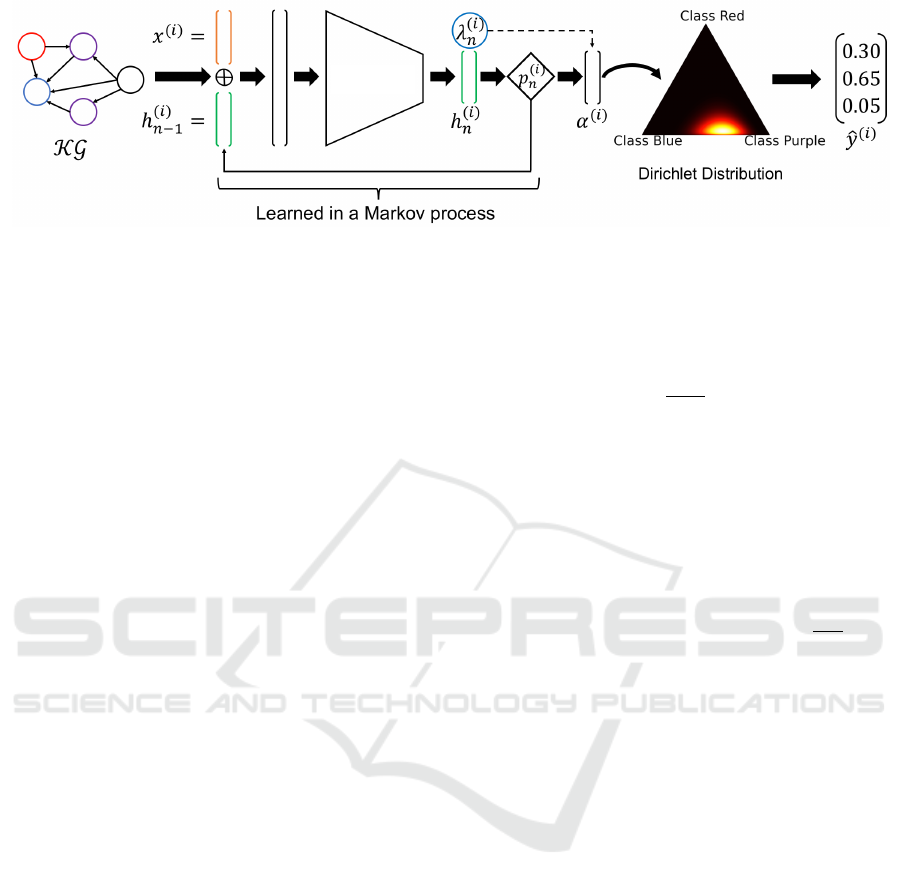
lem as a supervised learning problem. Figure 1
shows the overall architecture of our proposed so-
lution MPERL, which integrates a Markov process
into a GCN-based model, e.g., R-GCN (Schlichtkrull
et al., 2018). First, a representation of the entities
in the KG is learned (cf. Eqs. 1-3), which relies
on GCNs to represent entities from the KG and are
used in each step of the Markov process to calculate
the hidden layers. The Markov process in which the
model is learned is defined in Eqs. 4-6. We use a gen-
eralized geometric distribution to model the transition
probabilities of the two states (halt and continue) of
the Markov process. We learn with parameter λ
(i)
n
(cf. Eq. 5) a parameter from which we can derive
the probability in which step of the Markov process
the halt state is reached (cf. Eq. 6). By learning this
parameter, the number of Markov steps and, thus, the
number of epochs is adapted based on the input of
the model. The final output of MPERL is given in
Eqs. 7-9. In Eq. 7, the features of the individual steps
of the Markov process are aggregated by weighted
means and used to parameterize a Dirichlet distribu-
tion (Eq. 8). We use a Dirichlet distribution since this
is the only conjugate prior for a categorical distribu-
tion used to indicate the probability of class affiliation
of an entity in a KG. The prediction of a sample i is
Markov Process-Based Graph Convolutional Networks for Entity Classification in Knowledge Graphs
431
GCN-
based
Model
Figure 1: Approach for entity classification using MPERL. MPERL gets as input a one-hot encoding of the entity ID (denoted
x
(i)
) and the learned hidden features from the previous Markov step. The GCN-based model uses the structure of the KG to
compute the hidden features h
(i)
n
and the halting probability λ
(i)
n
. The prediction ˆy
(i)
is based on the Dirichlet parameters α
(i)
.
described by the expected probability of the Dirichlet
distribution in Eq. 9. We use the expected probabil-
ity as prediction for entity types due to its property of
unbiased manners.
Learning Process. For each entity e
(i)
∈ E of the KG
K G we initialize each entity representation by con-
catenating one hot encoding with hidden state of pre-
vious markov step. We denote this vector as x
(i)
. This
vector is concatenated with the hidden feature rep-
resentation of the entity e
(i)
of the previous Markov
step denoted as h
(i)
n−1
. Initially, in step n = 1, h
(i)
0
is a
null vector, so the feature representation is h
(i)
0
=
−→
0 .
n ∈ [1, N] denotes the current step of the Markov pro-
cess where N is the maximum number of Markov
steps. The concatenation of the two vectors x
(i)
and
h
(i)
n−1
is used as input to the neural network in step n
in the Markov process. We denote the neural network
input, i.e., in layer l = 0, of a sample i in Markov step
n as follows:
h
(i)[0]
n
= [x
(i)
∥ h
(i)
n−1
] (1)
where [ ∥ ] is the concatenation operation and the
number in square brackets in superscript denotes the
considered layer.
By incorporating the hidden feature representation
h
(i)
n−1
from the previous step, the learned features are
reused to enable faster convergence. The fundamen-
tal concept is similar to GCRNN, although rather than
using h
(i)
n−1
as the only input to MPERL, the concate-
nation of x
(i)
and h
(i)
n−1
is used to avoid overfitting.
The hidden representation of an entity e
(i)
∈ E in
layer l + 1 is then computed using a simple propaga-
tion model to calculate the forward pass update. For
updating the entity representation, we apply full sam-
pling or partial neighbourhood sampling (for larger
datasets) during message passing phase in graph neu-
ral networks.
h
(i)[l+1]
n
= φ
∑
r∈R
∑
j∈N
r
i
1
|N
r
i
|
W
[l]
r
h
( j)[l]
n
+W
[l]
0
h
(i)[l]
n
(2)
φ denotes the ReLU function and N
r
i
denotes the
indices of neighboring nodes with relation r ∈ R to
the node with index i. l ∈ [1, L] denotes the layer with
L as the number of layers in the neural network. In
Eq. 2, the feature representations of the neighboring
nodes of the node with index i are relation-specifically
aggregated with the weight matrix W
[l]
r
and normal-
ized by the number of neighboring nodes (
1
|N
r
i
|
). This
relation-specific transformation is summed up and ex-
tended by a self-loop to include the current represen-
tation of the node itself. The ReLU function φ is ap-
plied as a non-linear activation function. For regular-
izing the network layers’ weights, basis decomposi-
tion is used to avoid a rapid growth in the number of
parameters with the number of relations in the graph.
Basis decomposition uses a linear combination of ba-
sis transformations V
[l]
b
∈ R
d
[l+1]
×d
[l]
with coefficients
a
[l]
rb
such that only the coefficients depend on r.
W
[l]
r
=
B
∑
b=1
a
[l]
rb
V
[l]
b
(3)
For ease of reading, we denote the hidden rep-
resentation of the last layer of sample i in step n as
h
(i)
n
. MPERL learns a function S (x
(i)
,h
(i)
n−1
) that out-
puts the parameters of a Dirichlet distribution α
(i)
,
used as conjugate prior of a categorical distribution
from which the predictions ˆy
(i)
are drawn, the hidden
features h
(i)
n
and the probability of halting λ
(i)
n
at cur-
rent step. The function S(x
(i)
,h
(i)
n−1
) is learned within
a Markov process. We use λ
(i)
n
to learn the optimal
value n. The Markov process uses a Bernoulli ran-
dom variable, which we denote as Λ
n
, to represent
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
432

the two states continue (Λ
n
= 0) and halt (Λ
n
= 1).
halt is an absorbing state, meaning that, once en-
tered, cannot be left. This defines the end of learn-
ing within the Markov process. The Markov process
initially starts in the continue state, therefore Λ
0
= 0
holds. The transition probability of a sample i that the
state halt is assumed in step n, given that the previ-
ous step was continue is expressed by the following
conditional probability:
P(Λ
n
= 1|Λ
n−1
= 0) = λ
(i)
n
∀ 1 ≤ n ≤ N (4)
The conditional probability λ
(i)
n
is computed us-
ing a sigmoid function σ with parameters U ∈ R
d
[L]
×1
and h
(i)
n
∈ R
d
[L]
×1
, where d
[L]
denotes the number of
dimensions of the hidden features of h
(i)
n
in the last
layer.
λ
(i)
n
= σ(h
(i)
n
) =
1
1 + e
−U
T
h
(i)
n
(5)
The probability of entering the state halt in step
n ∈ [1,N] can be derived by means of the following
generalized geometric distribution p
n
.
p
(i)
n
= λ
(i)
n
n−1
∏
s=1
(1 − λ
(i)
s
) (6)
p
(i)
n
defines for sample (i.e., entity) i the probabil-
ity of entering the absorbing state Λ
n
= 1 for the first
time in step n, based on λ
(i)
n
.
Once the absorbing state Λ
n
= 1 has been entered,
the Markov process terminates and the learned hidden
features of each step, h
(i)
s
with 1 ≤ s ≤ n, are aggre-
gated. In contrast to existing work, which uses the
final output h
(i)
n
(Banino et al., 2021) or the weighted
average across all steps for prediction (
∑
n
s=1
ˆy
s
λ
s
), we
follow a different approach and use a weighted av-
erage of the hidden features across all steps as final
hidden feature.
h
(i)
=
n
∑
s=1
h
(i)
s
λ
(i)
s
(7)
In Eq. 7, λ
(i)
s
denotes for sample i the probability
to enter the absorbing state in step s. A high λ
(i)
s
value,
with 1 ≤ s ≤ n, is due to a fitting feature representation
h
(i)
s
to predict ˆy
(i)
, thus, a high significance is assigned
to this feature representation when aggregating h
(i)
.
h
(i)
∈ R
d
[L]
is thus an aggregation of the features
of the individual steps in the Markov process and is
used as parameter of the conjugate prior. The gen-
eral idea is that no softmax function is used to predict
the categorical values, but a conjugate prior categori-
cal distribution from which the predictions are drawn.
The advantage over a softmax function is that not just
one point estimator is available for prediction, but a
large number of categorical distributions that can be
drawn from the conjugate prior. At the same time, the
uncertainty can be quantified by the conjugate prior.
Given the supervised learning problem for predict-
ing categorical values y
(i)
∈ C, where C is the set of
classes in K G and K denotes the number of classes
(i.e. C = {C
1
,.. .,C
K
}), we use a Dirichlet distribu-
tion as conjugate prior of a categorical distribution.
Depending on the predictions of the Dirichlet distri-
bution’s parameters, the concentration of the drawn
distributions can be on one class or, if uncertainty is
large, it can be spread over several classes.
In order to determine the Dirichlet parameters
α
(i)
∈ R
K
+
for sample i, where K ≥ 2 always holds,
we use the aggregated hidden feature representation
h
(i)
(see Eq. 7) and a ReLU function φ to determine
the parameters of the Dirichlet distribution as follows:
α
(i)
= φ(h
(i)
) + 1 (8)
The ReLU function φ outputs values in the range
[0,∞). Since we add 1 in the Eq. 8, the constraint of
the Dirichlet parameter α
(i)
∈ R
K
>1
holds. The predic-
tion ˆy
(i)
of a sample is the expected probability of the
Dirichlet distribution with parameter α
(i)
.
ˆy
(i)
=
α
(i)
∑
K
k=1
α
(i)
k
(9)
3.2 Evidential with Regularization Loss
Based on existing work (Weller and Paulheim, 2021),
we have chosen to use an evidential loss function
rather than a cross-entropy function (Banino et al.,
2021; Schlichtkrull et al., 2018). However, to si-
multaneously control the number of steps within the
Markov process, our loss function L consists of two
terms L
ev
and L
reg
. The evidential loss L
Ev
optimizes
the parameter for fitting the predictions ˆy to the target
values y, and the regularization loss L
Reg
optimizes
the parameter for the number of Markov steps. For
the sake of readability, the following equation defines
the loss function for one sample.
The loss function L combines fundamental con-
cepts of E-R-GCN (Weller and Paulheim, 2021), Pon-
derNet (Banino et al., 2021), and uncertainty quantifi-
cation in neural networks (Sensoy et al., 2018). The
loss L and the corresponding adjustment of the pa-
rameters of the model is computed and adjusted after
each epoch and not after each step of the Markov pro-
cess. The reason for this is that if the weights are
adjusted after each Markov step, the rates of conver-
gence are lower, because the network adjusts itself in
Markov Process-Based Graph Convolutional Networks for Entity Classification in Knowledge Graphs
433

each Markov step and, thus, produces volatile results.
In contrast, computing the loss and adjusting the pa-
rameters of the model after each epoch is more natural
and allows smoother convergence of the parameters.
L =p
n
K
∑
k=1
(y
k
− ˆy
k
)
2
| {z }
L
err
Ev
+
ˆy
k
(1 − ˆy
k
)
∑
K
k=1
α
k
+ 1
| {z }
L
var
Ev
!
+δ
t
KL (D(
˜
α)||D(⟨1, .. .,1⟩))
| {z }
L
unc
Ev
L
Ev
+ β KL (p
n
|| p
G
(λ
p
))
| {z }
Regularization loss L
Reg
(10)
In our loss function, L
Ev
is the evidential loss
across halting steps. Consistent with previous work
in evidential learning, the evidential loss L
Ev
consists
of three components: minimizing the error of predic-
tion ˆy (L
err
Ev
), minimizing the variance of the Dirichlet
distribution to reduce uncertainty (L
var
Ev
), and a regu-
larization term which penalizes the predictive distri-
bution, which does not contribute to data fit (L
unc
Ev
). In
order to ensure that the evidential loss is stable even
for samples that do not follow the predicted distribu-
tion and, therefore, cannot be correctly classified but
the loss still decreases towards zero, the Kullback-
Leibler (KL) divergence is built into the evidential
loss L
ev
. In related work, it has been shown that us-
ing the KL divergence for out-of-distribution samples
provides more stable performance in prediction (Sen-
soy et al., 2018; Weller and Paulheim, 2021), which
is why we also use it in our loss L
Ev
and define it
as L
unc
Ev
in Eq. 10. L
unc
Ev
is multiplied by an annealing
coefficient δ
t
= min(1.0,t/10) ∈ [0,1]. We gradually
increase this coefficient within the first 10 epochs and
keep it fixed afterwards to ensure that the influence
of the annealing coefficient increases over the epochs
but does not exceed. In this way, we prevent an early
convergence to a uniform distribution for the misclas-
sified samples and allow the network to explore the
parameter space at the beginning.
In L
unc
Ev
, D(
˜
α) denotes the Dirichlet distribution
with parameter
˜
α and D(⟨1, ...,1⟩) denotes the uni-
form Dirichlet distribution.
˜
α is the adjusted evidence
of the previous parameter α and is defined as follows.
˜
α = y +(1 − y)α (11)
The regularization term L
unc
Ev
of the evidential loss
with annealing coefficient δ
t
, epoch t, gamma func-
tion Γ(·) and digamma function ψ(·) is as follows.
The second term of the loss function L (see Eq. 10)
is the regularization loss L
Reg
. L
Reg
uses the Kullback-
Leibler (KL) divergence to measure the difference be-
tween the distribution of halting probabilities p
n
at
step n and a prior geometric distribution denoted as
p
G
(λ
p
). The reason for using the regularization loss
L
Reg
is that it may improve generalization. In addi-
tion, it provides an incentive to keep the number of
Markov steps performed no longer than the given dis-
tribution p
G
(λ
p
).
KL (D(
˜
α)||D(⟨1, .. .,1⟩)) =
log
Γ
∑
K
k=1
˜
α
k
Γ(K)
∏
K
k=1
Γ(
˜
α
k
)
!
+
K
∑
k=1
(
˜
α
k
− 1)
"
ψ(
˜
α
k
) − ψ
K
∑
j=1
˜
α
j
!#
(12)
The goal of KL in the regularization term L
Reg
is
to approximate the distribution of p
n
to the geomet-
ric prior probability distribution p
G
(λ
p
), which is de-
fined by the hyperparameter λ
p
. This distribution de-
scribes the probability that the model enters the ab-
sorbing state (Λ
n
= 1) in step n as follows.
p
G
(λ
p
) = (1 −λ
p
)
n
λ
p
(13)
Using the geometric prior probability distribution
p
G
(λ
p
), an incentive is given to the network to ap-
proximate the number of Markov steps to the ex-
pected value of the geometric prior probability dis-
tribution E(p
G
(λ
p
)) =
1
λ
p
, i.e. promotes exploration.
This incentive can be controlled by the hyperparame-
ter β and is 0.01 in our study. L
Reg
in Eq. 10 is defined
as follows.
KL(p
n
||p
G
(λ
p
)) = log
λ
n
λ
p
!
+
1
λ
n
log
1 − λ
n
1 − λ
p
!
(14)
In summary, the loss function L (see Eq. 10) thus
has two functions. On the one hand, the conjugate
prior, which in our case is a Dirichlet distribution, is
to be fitted in such a way that the deviations between
the target values y and the predictions ˆy are minimized
by L
Ev
. And on the other hand, the number of Markov
steps should be controlled by L
Reg
.
4 EXPERIMENTS
First, we provide the experimental configuration
(§4.1). In our experimental study, we investigate the
following questions: (Q1). How effective is MPERL
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
434
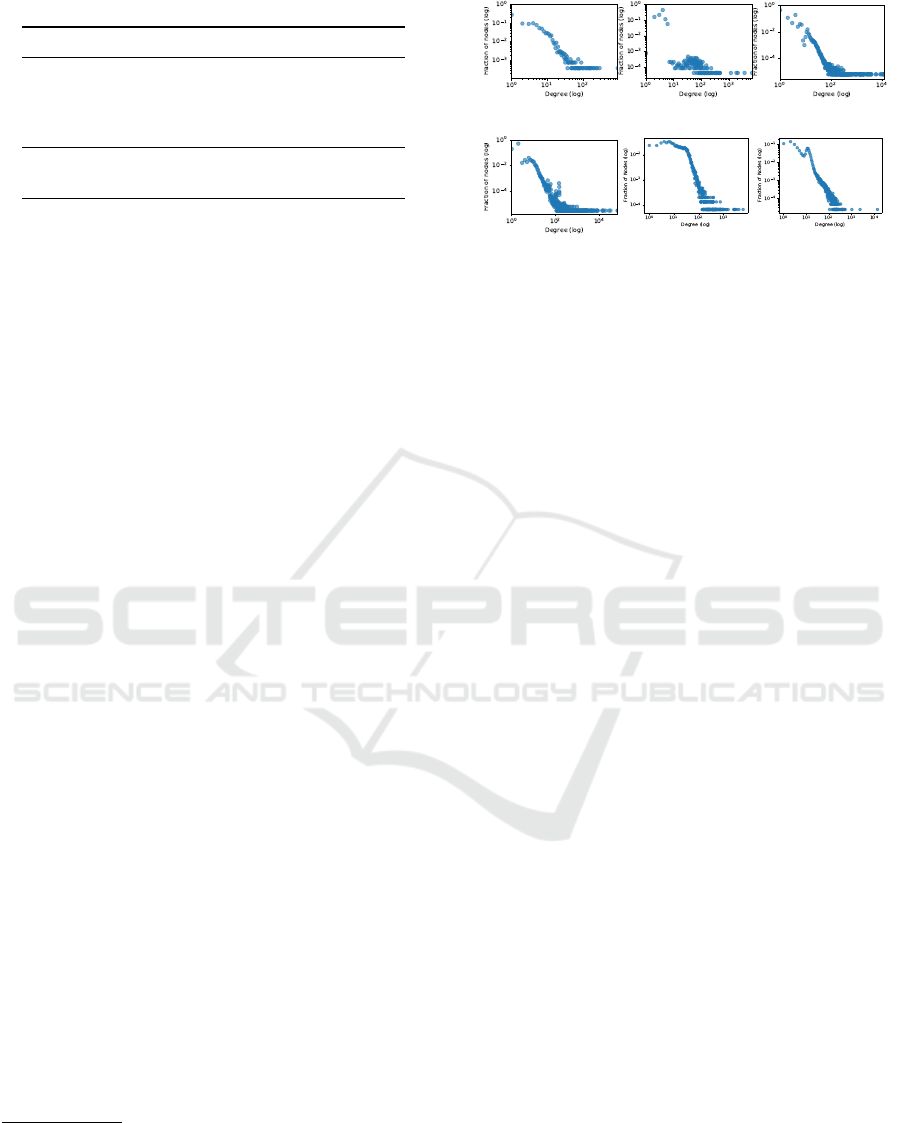
Table 1: Dataset statistics.
Datasets Entities Relations Triples Labelled Classes
AIFB 8,285 45 29,043 176 4
MUTAG 23,644 23 74,227 340 2
BGS 333,845 103 916,199 146 2
AM 1,666,764 133 5,988,321 1,000 11
FB15kET 14,951 1,345 483,142 168,313 3,584
YAGO43kET 42,335 37 331,686 462,083 45,182
on state-of-the-art benchmarks? (§4.2) (Q2). What
are the effects of the hyperparameter λ
p
of MPERL?
(§4.3) (Q3). What is the impact of the MPERL com-
ponents on the performance? (§4.4) The source code
and the datasets are available online
1
.
4.1 Experimental Setup
Datasets. The evaluation is performed using the
standard SOTA datasets used for entity classifica-
tion, i.e., AIFB, MUTAG, BGS, and AM for eval-
uation (Ristoski et al., 2016). In AIFB, the class
affiliation is modeled by the relation employs and
affiliation, MUTAG by isMutagenic, BGS by
hasLithogenesis, and AM by material. The
triples containing these relations have been removed
from training. We use predefined train/test splits,
which are provided with the datasets. In addition to
these benchmark datasets we consider two additional
larger benchmarks derived from real-world knowl-
edge graphs, i.e., FB15kET (Bordes et al., 2013b) and
YAGO43kET (Moon et al., 2017). We follow the pro-
posed train/valid/test split. The dataset statistics are
summarized in Table 1, and the degree of distribution
among the entities in the graphs is shown in Figure 2.
Metrics. We report on the accuracy and F1-macro
score for the four smaller datasets. For the larger
datasets, we use two ranking-based metrics in a fil-
tered setting
2
: Mean Reciprocal Rank (MRR) and
proportion of correct entity types predicted in top k
(HIT@k, k = 1, 3,10). Each experiment is run ten
times, and we present the average performance over
the test splits.
Approaches. We implemented MPERL using R-
GCN as the GCN-based model in the architecture.
Therefore, our experiments report on MPERL+R-
GCN as our approach. The baselines used in the ex-
periments include well-known models for entity clas-
1
https://github.com/DE-TUM/MPERL
2
Following (Bordes et al., 2013b), filtered setting means
that all the known types of entity e in the training, valida-
tion, and test sets are first removed from the ranking, allow-
ing us to obtain the exact rank of the correct type t
e
among
all types.
(a) AIFB. (b) MUTAG. (c) BGS.
(d) AM. (e) FB15kET. (f) YAGO43kET.
Figure 2: Degree distribution of entities in datasets.
sification in KGs. For the four smaller datasets, these
baselines comprise both GCN-based models, such as
R-GCN, E-R-GCN and CompGCN, and embedding-
based models including RDF2Vec, ConnectE, and
ASSET. In addition, we include Feat (Paulheim and
F
¨
umkranz, 2012), which uses hand-designed fea-
ture extractors, and WL (Shervashidze et al., 2011;
de Vries and de Rooij, 2015), which uses graph ker-
nels that count substructures in graphs. For all base-
lines, we used the recommended hyperparameter set-
tings. As reported in previous work (Schlichtkrull
et al., 2018; Ristoski and Paulheim, 2016; Ristoski
et al., 2019), a linear SVM was used to classify the
entities using RDF2Vec, WL, ConnectE, and ASSET.
On the larger datasets, we also compare our approach
with both GCN-based and embedding-based models.
For the GCN-based models, we consider HMGCN,
RACE2T, E-R-GCN, RGCN and CompGCN, with R-
GCN and CompGCN both using Binary Cross En-
tropy (BCE) loss. The baselines for the embedding-
based models consist of ETE (Moon et al., 2017),
ConnectE, RDF2Vec, and ASSET. We reuse the hy-
perparameters for CompGCN, R-GCN, and E-R-
GCN as suggested by their respective authors.
4.2 Accuracy Results
Results on Small Datasets. These datasets are de-
signed for single-label classification, i.e., every entity
belongs to one class. The hyperparameters used for
MPERL across the different datasets can be found in
the GitHub repository. The results for entity classifi-
cation are shown in Table 2. We see that MPERL+R-
GCN outperforms all the baseline methods. First, we
analyse the performance of MPERL+R-GCN with re-
spect to other GNN-based methods. Compared to R-
GCN, MPERL+R-GCN does not use a softmax func-
tion but a probabilistic loss function consisting of two
parts. As a result, our approach’s performance is
higher than R-GCN, as the loss used in MPERL+R-
Markov Process-Based Graph Convolutional Networks for Entity Classification in Knowledge Graphs
435
Table 2: Effectiveness results on small datasets.
Metrics Accuracy F1-Macro Score
Dataset AIFB MUTAG BGS AM AIFB MUTAG BGS AM
Embedding-based methods
ConnectE 83.33 75.00 79.31 88.38 80.36 70.32 74.11 86.94
RDF2Vec 88.88 67.20 87.24 88.33 86.72 62.19 85.54 87.63
ASSET 86.11 76.47 75.86 89.39 82.28 67.96 73.46 87.20
Graph featurization methods
Feat 55.55 77.94 72.41 66.66 51.69 75.82 70.88 64.87
WL 80.55 80.88 86.20 87.37 79.43 78.52 84.89 85.85
GNN-based methods
CompGCN 86.39 66.32 75.17 33.08 82.89 64.38 73.65 13.35
E-R-GCN 95.56 74.56 76.55 89.85 93.21 69.63 73.98 88.76
R-GCN 92.22 73.97 75.86 89.14 87.51 70.82 74.11 79.01
Our approach
MPERL
+R-GCN
97.22 80.88 89.66 90.40 96.13 79.26 88.26 89.07
GCN captures the information loss between ground
truth and predicted distribution. Even though E-R-
GCN uses the concept of an evidential loss function
as well, the end-to-end learning of R-GCN within a
Markov process demonstrates a lower sensitivity to
noisy neighbors due to the aggregation of the hidden
features of each step in the Markov process, as well
as a faster convergence over epochs due to the reuse
of the hidden feature h
n−1
in step n.
Compared to other methods, WL performs well,
especially on MUTAG, which matches the highest ac-
curacy achieved by MPERL. WL also performs well
on BGS and AM, making it one of the stronger non-
GNN methods. From the embeddings-based method,
RDF2Vec performs better in terms of the F1-Macro
score than other embeddings. When comparing re-
sults across datasets, the embeddings- and GNN-
based perform worse for the MUTAG dataset. MU-
TAG is relatively smaller than other datasets (e.g.,
BGS and AM) in terms of number of entities, rela-
tions, and classes (cf. Table 1). The approaches’ per-
formance indicates that learning effective representa-
tions for entities in MUTAG is difficult since the con-
nectivity of the entities is rather irregular, as shown
in the degree distribution in Figure 2b. These results
show that even in smaller datasets, entity classifica-
tion can be challenging for state-of-the-art methods.
Results on Large Datasets. Next, we assess the
performance of our studied approach on commonly
used large KGs to mimic real-world scenarios, such as
YAGO (Suchanek et al., 2007), Freebase (Bollacker
et al., 2008), in which each entity can have multiple
classes but some of which may be missing. There-
fore, in this study, entity classification corresponds to
a multi-label classification problem. This task is more
challenging than single-label classification, as it re-
quires handling multiple labels for each entity rather
Table 3: Effectiveness results on large datasets.
Datasets FB15kET YAGO43kET
Metrics MRR Hit@1 Hit@3 Hit@10 MRR Hit@1 Hit@3 Hit@10
Embedding-based methods
ETE 50.00 38.51 55.33 71.93 23.00 13.73 26.28 42.18
ConnectE 59.00 49.55 64.32 79.92 28.00 16.01 30.85 47.92
RDF2Vec 59.94 50.83 64.75 77.68 32.74 24.17 35.94 49.76
ASSET 60.73 51.65 65.43 78.72 28.11 21.13 29.93 41.53
GNN-based methods
HMGCN 51.03 39.12 54.83 72.42 25.01 14.19 27.33 43.68
RACE2T 64.14 55.56 68.40 81.36 34.12 25.27 37.36 52.29
E-R-GCN 64.59 56.94 69.12 80.09 29.67 22.63 32.43 43.51
R-GCN 63.50 53.74 69.00 82.23 31.56 23.32 34.53 47.49
Our approach
MPERL
+R-GCN
65.74 58.18 70.32 80.39 30.72 23.67 33.25 43.98
than assigning just a single type. Both benchmarks
include a significantly higher number of types and la-
beled entities than those in single-label entity classi-
fication, leading to potential GPU memory problems
during our experiments. To mitigate this problem, we
restrict the maximum number of Markov steps to 2
and apply partial neighborhood sampling. This sam-
pling strategy randomly selects a subset of neighbors
for a given entity during message passing in graph
neural networks, speeding up training and preventing
overfitting. However, it may risk performance degra-
dation if important featured neighbors are not sam-
pled. In practice, we only conduct neighbor sampling
during training, while all neighbors of the entity are
used during inference. The graphs of large datasets
are also augmented with type triples (e,hastype,t
e
)
when training embeddings, as proposed by (Pan et al.,
2021), which increases the prediction accuracy.
Table 3 shows the performance of our model and
the results of the baselines for both benchmarks.
For the FB15kET dataset, MPERL+R-GCN achieves
competitive results and especially outperforms all
baselines in terms of the Hit@1 metric, indicating
its higher accuracy in the top prediction of the miss-
ing types. We observe that MPERL+R-GCN shows
significant gains in prediction performance compared
to its fundamental model, R-GCN, and slightly per-
forms better than E-R-GCN, showing the usefulness
of Markov steps in our proposed model. However,
regarding YAGO43kET datasets, the performance of
MPERL+R-GCN is less powerful compared to the
FB15kET dataset. This discrepancy may arise due
to key differences between the benchmarks. First,
as shown in Figure 2, YAGO contains more higher-
degree hub entities (with degrees exceeding 10
4
),
which distorts information aggregated from neighbors
and reduces model performance, thereby decreasing
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
436
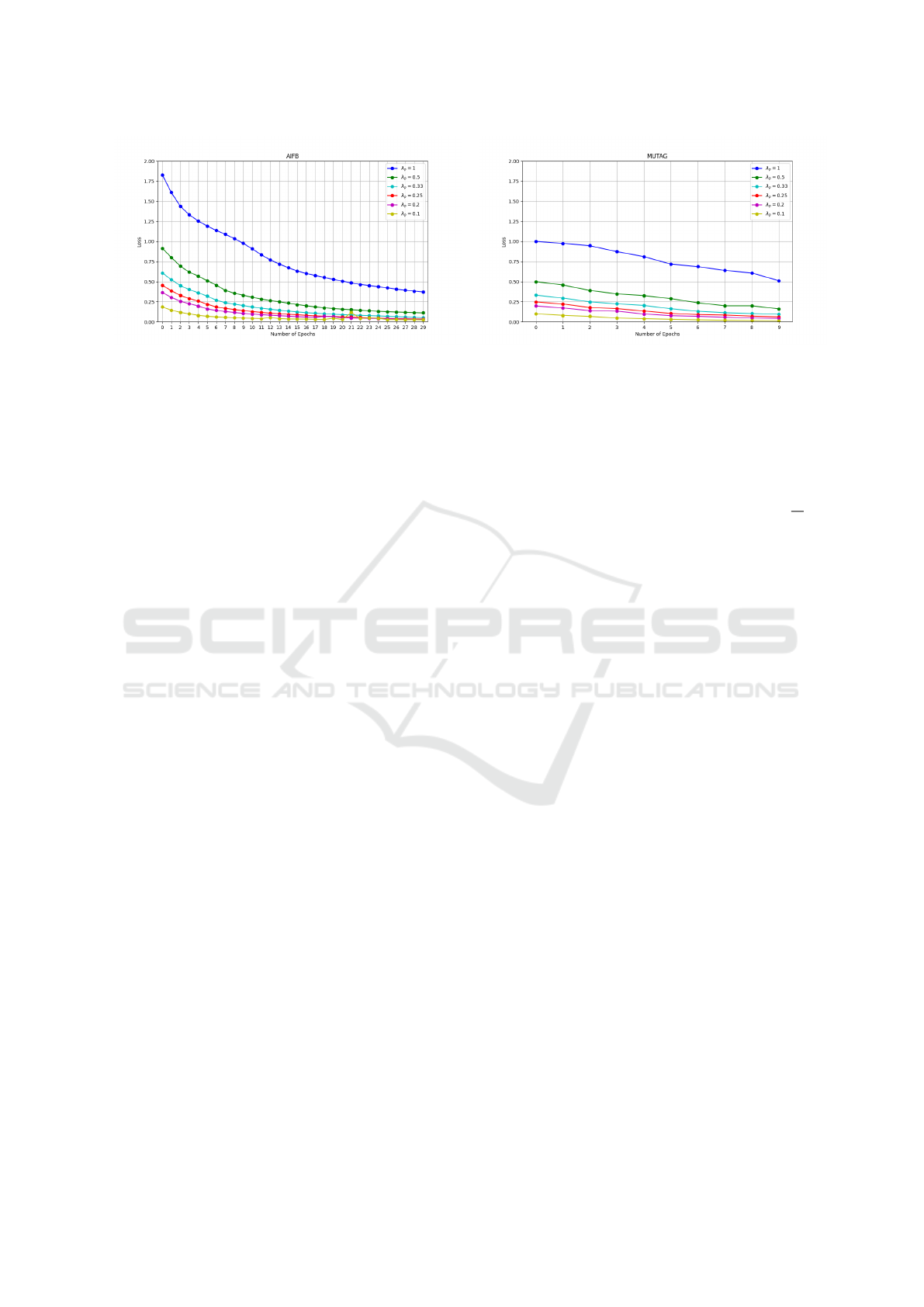
Figure 3: Learning curves for the AIFB dataset for different
λ
p
values.
the performance of our model. Second, as highlighted
in Table 1, YAGO43kET contains approximately 12
times more classes than FB15kET, further amplify-
ing the decline in performance. Additionally, due to
limited GPU memory, the batch size is set to a small
number (16 in practice) for the YAGO43kET dataset,
which may potentially lead MPERL to converge to
sub-optimal solutions. Overall, MPERL+R-GCN
consistently outperforms E-R-GCN in both bench-
marks. This demonstrates the benefits of incorporat-
ing the Markov process, which can reduce sensitiv-
ity to noisy neighbors due to the aggregation of hid-
den features at each Markov step. The results also
show that GNN-based methods tend to yield superior
outcomes overall compared to embedding-based ap-
proaches. These observations show the potential of
graph neural networks as a promising technique for
addressing entity-type prediction challenges.
In summary, MPERL outperforms the state-of-
the-art in small datasets. The consistently high
F1-Macro scores indicate that MPERL can effec-
tively classify entities that belong to least repre-
sented classes. In large datasets, MPERL showed
very good performance in FB15kET but not in
YAGO43kET. The sampling techniques implemented
to scale MPERL to large datasets may have affected
the learning process. These results suggest that our
proposed solution is more suitable for smaller knowl-
edge graphs, where learning meaningful representa-
tions is challenging due to the limited information
contained in these datasets (Q1).
4.3 Impact of the Hyperparameter λ
p
In the following, we study the impact of the hyperpa-
rameter λ
p
∈ (0,1] on the learning process of our ap-
proach MPERL on selected datasets. For this study,
we chose the two smallest datasets – AIFB and MU-
TAG – to ensure feasibility, as the study requires train-
ing the model multiple times with different λ
p
val-
Figure 4: Learning curves for the MUTAG dataset for dif-
ferent λ
p
values.
ues. Furthermore, MUTAG is an interesting dataset
as the performance of WL was very close to that of
MPERL, providing meaningful insights. λ
p
defines
the geometric prior probability distribution p
G
(λ
p
)
(see Eq. 13), which describes the probability that the
model enters the absorbing state (Λ
n
= 1) in step n.
The expected value of the distribution p
G
(λ
p
) is
1
λ
p
.
On the one hand, setting it to a low value ensures a
high number of steps in the Markov process. This
strategy encourages higher pondering of the model,
yet also leads to increased training time due to the
higher number of Markov steps and could result in
higher variance. On the other hand, if λ
p
is high, it
would lead the model to perform only a few Markov
steps. This setting leads to a reduced training time and
should be used to reduce a possible variance. In the
special case of λ
p
= 1, one Markov step is performed,
and therefore, the model corresponds to the evidence-
based approach of E-R-GCN. To study this in more
detail, we considered this special case and compared
the learning curves between λ
p
= 1.0 and smaller val-
ues of λ
p
, which correspond to several Markov steps.
Figures 3 and 4 show the average learning curves of
ten runs on selected datasets.
On both datasets, the loss for a single Markov step
(λ
p
= 1.0) is initially higher than for smaller values of
λ
p
, including λ
p
= 0.5 or two Markov steps. This is
because the learned features of the previous Markov
step are reused in the next one, and the prediction is
based on a conjugate prior distribution, which con-
sists of an aggregation of multiple hidden features
from each Markov step. This results in much more ac-
curate predictions and, thus, a lower loss. The learn-
ing curve for all λ
p
values decreases on all datasets
over the epochs. Yet, the loss of the model using
λ
p
= 1.0 does not drop below that of the model us-
ing smaller λ
p
values. Lastly, the difference between
λ
p
= 0.2 and λ
p
= 0.1 becomes almost negligible as
the number of Epochs increases in both datasets.
Thus, we can conclude that (i) a higher number
Markov Process-Based Graph Convolutional Networks for Entity Classification in Knowledge Graphs
437

Table 4: Ablation study on AIFB and MUTAG datasets.
Dataset AIFB MUTAG
Metrics Accuracy F1-Score Accuracy F1-Score
(-MP,-ERL) 94.44 95.08 66.18 43.63
(-MP,+ERL) 94.44 95.08 63.23 49.99
(+MP,-ERL) 83.33 80.12 67.65 47.69
(+MP,+ERL) 97.22 96.13 80.88 79.26
of Markov steps generally has a positive effect on
the performance of the model compared to a single
Markov step, and (ii) a significant decrease of the hy-
perparameter λ
p
to 0.1 – which produces a signifi-
cant increase of the number of Markov steps – does
not have a major impact on the performance of the
benchmark datasets used as the number of epochs in-
creases (Q2). We therefore recommend λ
p
= 0.2 as
the default value, representing a trade-off between ac-
curate entity classification and reduced training time
achieved with a low number of Markov steps.
4.4 Ablation Study
We conduct an ablation study to measure the impact
of each component in MPERL on the performance.
By systematically isolating, and evaluating each com-
ponent of our approach, our ablation study aims to
highlight the specific contributions and overall effec-
tiveness of our proposed approach. The two build-
ing blocks of our approach are (i) Markov Learning
Process (MP) (§3.1) and (ii) Evidential Regularized
Loss function (ERL) (§3.2). When a component is
not included, it is represented in the results by a ‘-
’, e.g., ‘-ERL’ equals the usage of the cross-entropy
loss function and ‘-MP’ equals no Markov Process
used. Conversely, when the component is included, it
is represented as ‘+’. The settings for running the ex-
periments are the ones used in §4.2. For the same rea-
sons explained in §4.3, we selected the datasets AIFB
and MUTAG. The evaluation metrics as reported in
Table 4, i.e., accuracy and F1-score, were used. In-
cluding MP alone (+MP, -ERL) decreases the per-
formance significantly for the AIFB dataset, yet for
MUTAG dataset it leads to a slight increase in accu-
racy (+1.47, from 66.18 to 67.65) and in F1-Macro
score (+4.06, from 43.63 to 47.69). These results in-
dicate that MP alone is not so effective without ERL,
and can even be detrimental in some datasets. In-
cluding ERL alone (-MP, +ERL) does not change the
results for accuracy and F1-score in AIFB. In MU-
TAG, +ERL slightly improves the F1-score (+6.36,
from 43.63 to 49.99) but decreases accuracy (−2.9,
from 66.18 to 63.23); this suggests that +ERL may
contribute to better classification of the entities for
smaller classes (containing lower number of entities)
in MUTAG. Still, ERL’s impact is minimal without
MP, and its effect depends on the dataset. Lastly,
in both datasets, the results show that including both
components (+MP, +ERL) improves the performance
significantly and consistently to the highest values,
showing that the combined effect of MP and ERL is
beneficial (Q3).
5 CONCLUSION AND FUTURE
WORK
In this work, we have shown how to combine
Graph Convolutional Neural Networks (GCN), con-
cepts from Evidential Learning, and PonderNet in the
MPERL approach for entity classification in knowl-
edge graphs. The model is learned within a Markov
decision process, which computes halting at the cur-
rent step. We implemented MPERL on top of R-
GCN, a state-of-the-art GCN-based architecture. The
experimental results show a performance increase in
most datasets, particularly compared to the previous
GCN-based models. The aggregation of the hidden
features of the individual steps in the Markov pro-
cess demonstrated a lower sensitivity to noisy neigh-
bors and improved performance. The hyperparameter
λ
p
defines the geometric prior probability distribution
and, thus, approximates the number of Markov steps.
A low λ
p
setting leads to a high number of Markov
steps and, therefore, to a high training time, which
has a positive effect on the performance compared
to a model that was learned within a Markov pro-
cess with only one step. The experiments have shown
that λ
p
= 0.2 (i.e., five Markov steps) has already led
to improved performance. The reuse of the learned
hidden features of the previous hidden features of the
Markov process has allowed faster convergence of pa-
rameters during learning.
As future work, we want to further investigate the
hyperparameter λ
p
, by employing an automated ap-
proach to select the optimal values. To improve the
scalability of our model in multi-label settings, we
also want to replace the Dirichlet distribution with a
more suitable alternative, such as the Beta distribu-
tion (Zhao et al., 2023). Lastly, we want to extend
MPERL with a gated unit that automatically adjusts
the weight of the hidden representation from the pre-
vious Markov step (h
n−1
) as input during learning.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
438

ACKNOWLEDGEMENTS
This work has been funded by the Deutsche
Forschungsgemeinschaft (DFG, German Research
Foundation) - SFB 1608 - 501798263.
REFERENCES
Amini, A., Schwarting, W., Soleimany, A., and Rus, D.
(2020). Deep evidential regression. In Advances in
Neural Information Processing Systems, volume 33,
pages 14927–14937. Curran Associates, Inc.
Banino, A., Balaguer, J., and Blundell, C. (2021). Ponder-
net: Learning to ponder.
Berrendorf, M., Faerman, E., Melnychuk, V., Tresp, V., and
Seidl, T. (2020). Knowledge graph entity alignment
with graph convolutional networks: Lessons learned.
In Advances in Information Retrieval, pages 3–11,
Cham. Springer International Publishing.
Biswas, R., Portisch, J., Paulheim, H., Sack, H., and Alam,
M. (2022). Entity type prediction leveraging graph
walks and entity descriptions. In The Semantic Web
- ISWC 2022 - 21st International Semantic Web Con-
ference, Proceedings, volume 13489 of Lecture Notes
in Computer Science, pages 392–410.
Biswas, R., Sofronova, R., Sack, H., and Alam, M. (2021).
Cat2type: Wikipedia category embeddings for en-
tity typing in knowledge graphs. In Proceedings of
the 11th on Knowledge Capture Conference, K-CAP,
page 81–88. Association for Computing Machinery.
Biswas, R., T
¨
urker, R., Moghaddam, F. B., Koutraki, M.,
and Sack, H. (2018). Wikipedia infobox type predic-
tion using embeddings. In DL4KGS@ESWC.
Bollacker, K., Evans, C., Paritosh, P., Sturge, T., and
Taylor, J. (2008). Freebase: a collaboratively cre-
ated graph database for structuring human knowledge.
In Proceedings of the 2008 ACM SIGMOD inter-
national conference on Management of data, pages
1247–1250.
Bordes, A., Usunier, N., Garcia-Duran, A., Weston, J., and
Yakhnenko, O. (2013a). Translating embeddings for
modeling multi-relational data. In Advances in Neu-
ral Information Processing Systems, volume 26. Cur-
ran Associates, Inc.
Bordes, A., Usunier, N., Garcia-Duran, A., Weston, J., and
Yakhnenko, O. (2013b). Translating embeddings for
modeling multi-relational data. Advances in neural
information processing systems, 26.
Busbridge, D., Sherburn, D., Cavallo, P., and Hammerla,
N. Y. (2019). Relational graph attention networks.
Chen, Y., Zou, L., and Qin, Z. (2019). Gated relational
graph neural network for semi-supervised learning on
knowledge graphs. In Web Information Systems En-
gineering – WISE 2019, pages 617–629. Springer In-
ternational Publishing.
de Vries, G. K. D. and de Rooij, S. (2015). Substructure
counting graph kernels for machine learning from rdf
data. Journal of Web Semantics, 35:71–84.
Dong, T., Wang, Z., Li, J., Bauckhage, C., and Cremers,
A. B. (2019). Triple classification using regions and
fine-grained entity typing. Proceedings of the AAAI
Conference on Artificial Intelligence, 33(01):77–85.
Hamilton, W. L., Ying, R., and Leskovec, J. (2017). In-
ductive representation learning on large graphs. In
Proceedings of the 31st International Conference on
Neural Information Processing Systems, NIPS, page
1025–1035.
Heist, N., Hertling, S., Ringler, D., and Paulheim, H.
(2020). Knowledge graphs on the web–an overview.
In Knowledge Graphs for eXplainable Artificial Intel-
ligence: Foundations, Applications and Challenges,
pages 3–22. IOS Press.
Kejriwal, M. and Szekely, P. A. (2017). Supervised typ-
ing of big graphs using semantic embeddings. CoRR,
abs/1703.07805.
Kipf, T. N. and Welling, M. (2016). Semi-supervised clas-
sification with graph convolutional networks. arXiv
preprint arXiv:1609.02907.
Long, J., Wang, Y., Wei, X., Ding, Z., Qi, Q., Xie, F., Qian,
Z., and Huang, W. (2021). Entity-centric fully con-
nected GCN for relation classification. Applied Sci-
ences, 11(4):1377.
Moon, C., Jones, P., and Samatova, N. F. (2017). Learn-
ing entity type embeddings for knowledge graph com-
pletion. In Proceedings of the 2017 ACM on con-
ference on information and knowledge management,
pages 2215–2218.
Nickel, M., Tresp, V., and Kriegel, H.-P. (2011). A three-
way model for collective learning on multi-relational
data. In Proceedings of the 28th International Confer-
ence on International Conference on Machine Learn-
ing, ICML, page 809–816.
Pan, W., Wei, W., and Mao, X.-L. (2021). Context-aware
entity typing in knowledge graphs. In Findings of the
Association for Computational Linguistics: EMNLP
2021, pages 2240–2250.
Paulheim, H. and F
¨
umkranz, J. (2012). Unsupervised gen-
eration of data mining features from linked open data.
In Proceedings of the 2nd International Conference
on Web Intelligence, Mining and Semantics.
Riaz, A., Abdollahi, S., and Gottschalk, S. (2023). Entity
typing with triples using language models. In The
Semantic Web: ESWC 2023 Satellite Events - Her-
sonissos, Crete, Greece, Proceedings, volume 13998
of Lecture Notes in Computer Science, pages 169–
173. Springer.
Ristoski, P., De Vries, G. K. D., and Paulheim, H. (2016). A
collection of benchmark datasets for systematic eval-
uations of machine learning on the semantic web. In
The Semantic Web–ISWC 2016: 15th International
Semantic Web Conference, Kobe, Japan, October 17–
21, 2016, Proceedings, Part II 15.
Ristoski, P. and Paulheim, H. (2016). Rdf2vec: Rdf graph
embeddings for data mining. In The Semantic Web –
ISWC 2016. Springer International Publishing.
Ristoski, P., Rosati, J., Di Noia, T., De Leone, R., and Paul-
heim, H. (2019). Rdf2vec: Rdf graph embeddings and
their applications. Semantic Web, 10(4):721–752.
Markov Process-Based Graph Convolutional Networks for Entity Classification in Knowledge Graphs
439

Schlichtkrull, M., Kipf, T. N., Bloem, P., van den Berg, R.,
Titov, I., and Welling, M. (2018). Modeling relational
data with graph convolutional networks. In The Se-
mantic Web, pages 593–607, Cham. Springer Interna-
tional Publishing.
Sensoy, M., Kaplan, L., and Kandemir, M. (2018). Evi-
dential deep learning to quantify classification uncer-
tainty. In Advances in Neural Information Processing
Systems, volume 31.
Shervashidze, N., Schweitzer, P., van Leeuwen, E. J.,
Mehlhorn, K., and Borgwardt, K. M. (2011).
Weisfeiler-lehman graph kernels. Journal of Machine
Learning Research, 12(77):2539–2561.
Sofronova, R., Alam, M., and Sack, H. (2020). Entity typ-
ing based on rdf2vec using supervised and unsuper-
vised methods.
Suchanek, F. M., Kasneci, G., and Weikum, G. (2007).
Yago: a core of semantic knowledge. In Proceedings
of the 16th international conference on World Wide
Web, pages 697–706.
Wang, H., Zhao, M., Xie, X., Li, W., and Guo, M. (2019).
Knowledge graph convolutional networks for recom-
mender systems. In The World Wide Web Conference,
page 3307–3313.
Wang, P., Zhou, J., Liu, Y., and Zhou, X. (2021). Transet:
Knowledge graph embedding with entity types. Elec-
tronics, 10:1407.
Wang, Z., Lv, Q., Lan, X., and Zhang, Y. (2018). Cross-
lingual knowledge graph alignment via graph convo-
lutional networks. In Proceedings of the 2018 Con-
ference on Empirical Methods in Natural Language
Processing.
Weller, T. and Acosta, M. (2021). Predicting instance type
assertions in knowledge graphs using stochastic neu-
ral networks. In Proceedings of the 30th ACM Inter-
national Conference on Information and Knowledge
Management, page 2111–2118.
Weller, T. and Paulheim, H. (2021). Evidential relational-
graph convolutional networks for entity classification
in knowledge graphs. In CIKM ’21: The 30th ACM
International Conference on Information and Knowl-
edge Management, pages 3533–3537. ACM.
Xiong, C. and Callan, J. (2015). Esdrank: Connecting query
and documents through external semi-structured data.
In Proceedings of the 24th ACM International on
Conference on Information and Knowledge Manage-
ment, page 951–960. Association for Computing Ma-
chinery.
Yang, B., Yih, W., He, X., Gao, J., and Deng, L. (2015).
Embedding entities and relations for learning and in-
ference in knowledge bases. In 3rd International
Conference on Learning Representations, ICLR 2015,
San Diego, CA, USA, May 7-9, 2015, Conference
Track Proceedings.
Yasunaga, M., Ren, H., Bosselut, A., Liang, P., and
Leskovec, J. (2021). Qa-gnn: Reasoning with lan-
guage models and knowledge graphs for question an-
swering. In North American Chapter of the Associa-
tion for Computational Linguistics (NAACL).
Zahera, H. M., Heindorf, S., and Ngomo, A. N. (2021). AS-
SET: A semi-supervised approach for entity typing in
knowledge graphs. In K-CAP ’21: Knowledge Cap-
ture Conference, Virtual Event, USA, December 2-3,
2021, pages 261–264. ACM.
Zangari, L., Interdonato, R., Cali
´
o, A., and Tagarelli, A.
(2021). Graph convolutional and attention models for
entity classification in multilayer networks. Applied
Network Science, 6(1):1–36.
Zhao, C., Du, D., Hoogs, A., and Funk, C. (2023). Open
set action recognition via multi-label evidential learn-
ing. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
22982–22991.
Zhao, Y., zhang, a., Xie, R., Liu, K., and WANG, X. (2020).
Connecting embeddings for knowledge graph entity
typing. In Proceedings of the 58th Annual Meeting of
the Association for Computational Linguistics.
Zou, C., An, J., and Li, G. (2022). Knowledge graph en-
tity type prediction with relational aggregation graph
attention network. In European Semantic Web Con-
ference, pages 39–55. Springer.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
440
