
Transformer or Mamba for Temporal Action Localization? Insights from
a Comprehensive Experimental Comparison Study
Zejian Zhang
1 a
, Cristina Palmero
2 b
and Sergio Escalera
1 c
1
Universitat de Barcelona and Computer Vision Center, Barcelona, Spain
2
Department of Engineering, King’s College London, London, U.K.
Keywords:
Temporal Action Localization (TAL), Temporal Action Detection (TAD), Transformer, Self-Attention, State
Spate Models (SSMs), Mamba, Multi-Scale.
Abstract:
Deep learning models need to encode both local and global temporal dependencies for accurate temporal
action localization (TAL). Recent approaches have relied on Transformer blocks, which has a quadratic com-
plexity. By contrast, Mamba blocks have been adapted for TAL due to their comparable performance and
lower complexity. However, various factors can influence the choice between these models, and a thorough
analysis of them can provide valuable insights into the selection process. In this work, we analyze the Trans-
former block, Mamba block, and their combinations as temporal feature encoders for TAL, measuring their
overall performance, efficiency, and sensitivity across different contexts. Our analysis suggests that Mamba
blocks should be preferred due to their performance and efficiency. Hybrid encoders can serve as an alternative
choice when sufficient computational resources are available.
1 INTRODUCTION
Temporal action localization (TAL) is a challenging
yet critical task for video analysis, owing to its wide
range of real-world applications such as video surveil-
lance, sports analytics, and human activity under-
standing (Elharrouss et al., 2021) (Ghosh et al., 2023)
(Saleem et al., 2023). TAL involves identifying pre-
cise start and end timestamps of actions and assigning
their action labels in untrimmed videos. Due to the
complexity of video contents, actions in videos of-
ten exhibit ambiguity in boundaries and various dura-
tions, making it difficult for traditional convolutional
neural network (CNN)-based models (Gong et al.,
2020) (Zhu et al., 2021) to learn necessary temporal
dependencies to output precise action boundaries.
Recent approaches (Zhang et al., 2022) (Shao
et al., 2023) (Zhang et al., 2024) in TAL have adapted
Transformers (Vaswani et al., 2017) to encode video
frames into a multi-scale representation (see Fig.
1A), leveraging the advantages of both self-attention
(Vaswani et al., 2017) and multi-resolution action de-
tection. However, the self-attention operation has a
a
https://orcid.org/0000-0001-9810-3726
b
https://orcid.org/0000-0002-6085-6527
c
https://orcid.org/0000-0003-0617-8873
Feature Extraction
Feature Embedding
Transformer Encoder
Mamba Block
Hybrid Architecture
Action
Labels
Action
Locations
Temporal Feature Encoder
(A) (B)
Figure 1: Illustration of the multi-scale TAL architecture.
(A) The model involves extracting clip features from video
frames, applying a feature embedding for dimensional re-
duction, and encoding the input into an L-level multi-scale
representation by temporal feature encoders, followed by
an action localization head. (B) The three types of temporal
feature encoder we compare and study in this work.
quadratic complexity, representing one of the biggest
hurdles for processing long sequences. Researchers
have been exploring new possibilities to break this
quadratic computational cost (Gu et al., 2021).
Structured State Space Models (SSMs) (Gu et al.,
2021) (Gu et al., 2022), particularly the Mamba block
(Gu and Dao, 2023), have been proposed and have
demonstrated promising performance in various long
sequence modeling tasks (Gu and Dao, 2023). Com-
pared to the state-of-the-art Transformer-based meth-
150
Zhang, Z., Palmero, C. and Escalera, S.
Transformer or Mamba for Temporal Action Localization? Insights from a Comprehensive Experimental Comparison Study.
DOI: 10.5220/0013173000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
150-162
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

ods, Mamba has fewer parameters and scales nearly
linearly with sequence length, making it effective
for processing untrimmed video sequences for TAL.
Early adaptations in this direction include Action-
Mamba (Chen et al., 2024) and CausalTAD (Liu et al.,
2024b). Despite these initial attempts to explore
Mamba’s potential for TAL, there is a lack of com-
parison among these encoders, especially when com-
bining them (the Transformer and Mamba block) into
a single encoder used to learn temporal dependencies.
Such a comparison could be useful for providing in-
sights into further explorations of their capacities in
TAL and other video understanding tasks.
In this work, we aim to conduct a comprehen-
sive experimental comparison of the well-established
Transformer, the Mamba block, and their integration
into a hybrid architecture. We focus on their perfor-
mance, complexity, and efficiency in handling video
sequences for the TAL task. Specifically, we analyze
four groups of models equipped with different tempo-
ral feature encoders, resulting in a total of 12 distinct
models. Our contributions are as follows:
1. We present a comprehensive experimental com-
parison of the Transformer and Mamba block-based
models for TAL. These models are categorized into:
Transformer-based models utilizing either global or
sliding window attention; pure Mamba block-based
models, including the original Mamba block, bidirec-
tional Mamba (ViM) (Zhu et al., 2024), and decom-
posed bidirectionally Mamba (DBM) (Chen et al.,
2024) blocks; a sequential architecture that integrates
the Transformer block with Mamba blocks; and a par-
allel hybrid model that utilizes the Transformer and
Mamba blocks concurrently
2. We adapt the MambaFormer block (Park et al.,
2024) into a multi-scale architecture, marking, to the
best of our knowledge, its first application for TAL
tasks. We extend this configuration to include six dif-
ferent temporal feature encoders.
3. We conduct experiments on three commonly
used TAL datasets, providing insights for selecting
different temporal feature encoders based on datasets
and requirements. Our evaluation uses various met-
rics, including the standard performance measures,
efficiency, and sensitivity. Additionally, we analyze
the scaling capability of the original Mamba block.
Our results suggest that, in most cases, pure Mamba
block-based models should be preferred due to their
superior performance and lower complexity. Hybrid
counterparts may serve as an alternative choice for
scenarios with higher performance demands.
2 RELATED WORK
Temporal Action Localization. Research in TAL
can be divided into two categories: two-stage and
one-stage methods. Two-stage methods (Zhu et al.,
2021) (Sridhar et al., 2021) (Zhao et al., 2021) (Chen
et al., 2022) involve generating coarse proposals fol-
lowed by refining these proposals to produce the final
outputs. By contrast, one-stage methods (Lin et al.,
2021) (Liu et al., 2022) (Zhang et al., 2022) (Kang
et al., 2023) (Zhao et al., 2023) (Shi et al., 2023)
tackle both sub-tasks simultaneously within a unified
framework. An effective TAL model relies on en-
coding relevant long and short temporal dependen-
cies in the input data. Various deep learning methods
have been explored for this purpose, including CNN
(Lecun et al., 1990), graph neural networks (GNN)
(Scarselli et al., 2009), and attention-based (Vaswani
et al., 2017) methods. Recent advancements (Zhang
et al., 2022) (Shao et al., 2023) (Zhang et al., 2024)
(Chen et al., 2024) (Liu et al., 2024b) have partic-
ularly focused on one-stage methods, which adapt
temporal encoders such as the Transformer block
(Vaswani et al., 2017) and Mamba block (Gu and
Dao, 2023) to transform input videos into a multi-
scale representation, where the temporal resolution
is downsampled at higher levels, thereby enabling
the localization of actions across different resolutions.
These methods have demonstrated superior perfor-
mance compared to previous CNN- or GNN-based
approaches thanks to their multi-scale design and the
ability to process long sequence data. In this work, we
focus on analyzing the well-established Transformer
block, the emerging Mamba block, and the combi-
nation of both into a hybrid architecture (Park et al.,
2024) (Liu et al., 2024b), exploring their performance
and computational efficiency as temporal feature en-
coders in the multi-scale architecture for TAL task on
different benchmarks.
State Space Models. Inspired by the traditional
SSMs in control theory (Kalman, 1960), structured
SSMs (Gu et al., 2021) (Gu et al., 2022) (Fu et al.,
2023) were proposed for modeling long-range se-
quences such as in natural language processing, over-
coming the performance issues in CNNs (Lecun et al.,
1990) and recurrent neural networks (RNNs) (Bisong
and Bisong, 2019), as well as the quadratic scaling
issue in the Transformer (Vaswani et al., 2017) en-
coders. Mamba, in particular, combines an SSM layer
(Fu et al., 2023) with gated MLP (multi-layer per-
ceptron) (Liu et al., 2024a), achieving on par per-
formance in sequence data modeling, such as lan-
guage and audio (Gu and Dao, 2023), while demon-
strating linear scaling with sequence length. Mamba
Transformer or Mamba for Temporal Action Localization? Insights from a Comprehensive Experimental Comparison Study
151

has been explored for visual applications, such as Vi-
sion Mamba (Zhu et al., 2024) for images and Video
Mamba Suite (Chen et al., 2024) for video under-
standing. We study and analyze the original Mamba
block (Gu and Dao, 2023) and its variants, namely,
ViM (Zhu et al., 2024) and DBM (Chen et al., 2024),
as the sole encoder in the multi-scale architecture for
TAL due to their strong capability to process long se-
quence data.
Hybrid Transformer and Mamba. While
Mamba has shown promising performance in certain
tasks, it has been found that a pure Mamba-equipped
encoder does not perform as well as Transformer-
based counterparts, e.g., in in-context learning tasks
that require non-standard retrieval capabilities (Park
et al., 2024). Various studies have explored inte-
grating the Transformer block with Mamba blocks
into a hybrid architecture to capitalize on their com-
plementary strengths for capturing long-range depen-
dencies. For instance, MambaVision (Hatamizadeh
and Kautz, 2024) augments the Mamba block with
Transformer layers to enhance global context recov-
ery. MambaFormer (Park et al., 2024) combines
Mamba with self-attention blocks. Instead of a se-
quential combination of Transformer and Mamba
blocks, CausalTAD (Liu et al., 2024b) introduces a
dual architecture for TAL, where the input is pro-
cessed simultaneously by a Transformer block and a
Mamba block. Despite the existence of other possi-
ble combinations, this study concentrates on two ar-
chitectures: MambaFormer (a sequential model) and
CausalTAD (a parallel model). Our goals thus are: 1)
adapt the MambaFormer architecture for TAL tasks,
and 2) evaluate their performance as temporal feature
encoders for TAL applications.
3 METHODOLOGY
3.1 TAL Problem Definition
Given an input video, it is represented by a set of
pre-extracted features X = {x
1
, x
2
,..., x
T
}, where t ∈
{1, 2,..., T} are the number of frames and T varies
across videos. The goal is to predict all the action
instances Y based on X, where Y = {y
1
, y
2
,..., y
N
}
are the ground truth action instances. Each ac-
tion instance is defined as y
i
= (s
i
, e
i
, c
i
), where i ∈
{1, 2,..., N} are the number of action instances, s
i
,
e
i
∈ [1,T] are the start and end timestamps (s
i
< e
i
),
and c
i
∈ {1, 2,..., C} is the corresponding action la-
bel.
3.2 Model Overview
We employ a multi-scale architecture, as illustrated
in Fig. 1, to construct the model used for evaluation,
due to its straightforward design and superior perfor-
mance demonstrated in recent one-stage TAL meth-
ods (Zhang et al., 2022) (Shi et al., 2023) (Zhang
et al., 2024). The model comprises three parts: fea-
ture extraction and embedding, multi-scale temporal
feature encoding, and action localization. The in-
put videos are processed by pre-trained CNN mod-
els, such as I3D (Carreira and Zisserman, 2017) on
Kinetics (Kay et al., 2017), to extract clip features.
The extracted features are then embedded into a la-
tent space that matches the dimensional requirements
of the temporal feature encoder. Action localization
is performed by a two-branch head, one for classify-
ing action labels and the other for regressing action
boundaries. The head is shared across all levels of the
multi-scale feature representation. Since our primary
objective is to analyze the performance of different
temporal feature encoders, we fix the architecture de-
sign of the feature embedding and localization head
while varying the temporal feature encoders.
In the following section, we present the temporal
feature encoders utilized for encoding the input video
into a multi-scale representation.
3.3 Temporal Feature Encoders
The evaluated temporal feature encoders are catego-
rized into three types: pure Transformer blocks, pure
Mamba blocks, and hybrid architectures that combine
self-attention layers with Mamba blocks.
3.3.1 Preliminaries
In this section, we provide a brief review of the self-
attention mechanism and the SSMs, which serve as
the core operation for the Transformer block and
Mamba block, respectively.
Self-Attention. The self-attention operation takes
an arbitrary length of token embedding (X) as input
and aggregates relevant information by measuring the
similarity among tokens. The attention score is com-
puted by Attn(Q, K,V) = Softmax
QK
⊤
√
d
k
V, where
Q, K, and V are the queries, keys and values projected
from the input embedding. To encode richer and more
robust temporal relationships, the multi-head atten-
tion is commonly used, with each attention head fo-
cusing on different aspects simultaneously. Subse-
quently, the outputs from these heads are concate-
nated to form the final attention scores. In order to
mitigate the quadratic complexity, sliding window at-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
152
Layer Norm
Multi-Head
Attention
Layer Norm
MLP
Linear Linear
Conv1D
SSM
SiLU
Linear
SiLU
Linear Linear
Forward
Conv1D
Forward
SSM
Linear
SiLU
Backward
Conv1D
Backward
SSM
Linear Linear
Forward
Conv1D
Forward
SSM
Linear
SiLU
Backward
Conv1D
Backward
SSM
Linear
SiLU
Linear
Shared Weights
Transformer Encoder Mamba Block - Original
concat
Mamba Block - ViM Mamba Block - DBM
A B
D
C
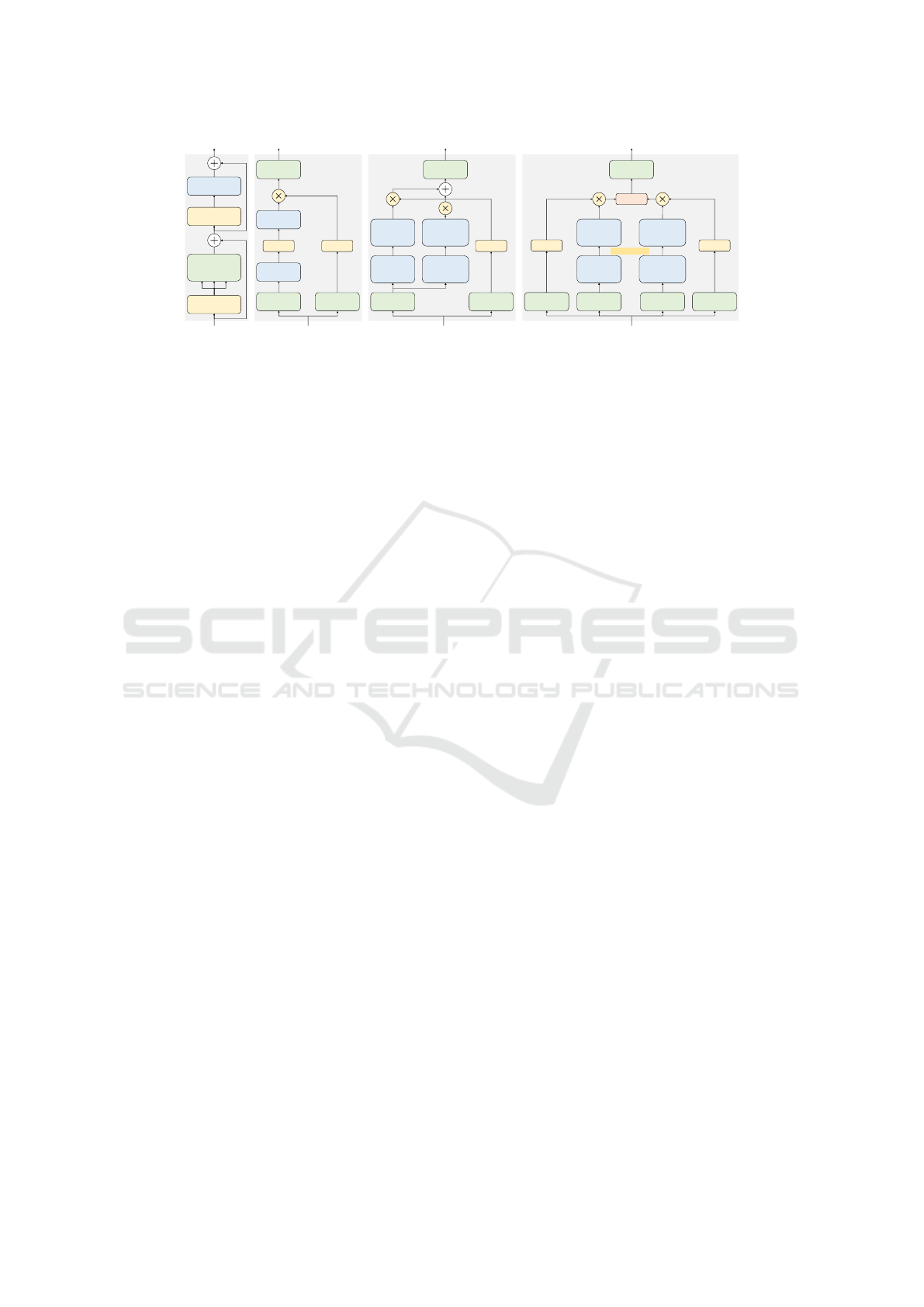
Figure 2: Illustration of temporal feature encoders. (A) The Transformer (Vaswani et al., 2017) block, which utilizes (sliding
window) multi-head self-attention. (B) The original Mamba block (Gu and Dao, 2023), which utilizes SSMs. (C) The ViM
block (Zhu et al., 2024), which adds a backward scanning to the original Mamba block. (D) The DBM block (Chen et al.,
2024), which separates the input projections and adds a backward scanning with shared weights.
tention is often used instead, restricting the attention
calculation to a local window of fixed size.
State Space Models. State space models were in-
troduced in control theory for modeling continuous
systems using state variables (Kalman, 1960). These
models map an input to an output through a hidden
state. Inspired by this approach, the structured SSMs,
such as S4 (Gu et al., 2022) and Mamba (Gu and
Dao, 2023), have been proposed for processing lan-
guage and vision data. The continuous parameters
are discretized to
¯
A and
¯
B through a transformation
method, e.g., zero-order hold (ZOH). Subsequently,
the SSMs for processing discrete input at time t is
defined as: h
t
=
¯
Ah
t−1
+
¯
Bx
t
, y
t
= Ch
t
. Finally, for
an input X, the computation of the output Y involves
a global convolution, denoted as Y = X ∗
¯
K, where
¯
K = (C
¯
B, C
¯
A
¯
B, ..., C
¯
A
M−1
¯
B) is a structured convo-
lutional kernel, and M is the length of X.
3.3.2 Transformer Block
A Transformer block (see Fig. 2A) consists of a (slid-
ing window) multi-head self-attention (MHA) layer
followed by an MLP block. To facilitate stable and ef-
ficient training, Layer Normalization (LN) is applied
before the MHA and MLP layers, and residual con-
nections are added after each. Given an input X
i
, the
output of the Transformer block X
o
is obtained by:
X
′
= X
i
+MHA(LN(X
i
)), X
o
= X
′
+MLP(LN(X
′
)).
3.3.3 Mamba Blocks
The Mamba blocks used for temporal feature encod-
ing are the original Mamba block (Gu and Dao, 2023),
incorporating a forward SSM, and two variants (i.e.,
ViM (Zhu et al., 2024) and DBM (Chen et al., 2024))
which, in addition to the forward SSM, include a
backward SSM.
Mamba Block. A Mamba block (see Fig. 2B)
combines the SSM layer proposed in (Fu et al., 2023)
with gated MLP (Liu et al., 2024a). For an input X
i
,
it is mapped to x and z with linear projections. x un-
dergoes transformation via a Conv1D layer followed
by an SSM layer. The transformed x is then gated by
z, after which a projection layer is applied to produce
the final output X
o
. The process is defined as follows:
x = Proj
x
(X
i
), z = Proj
z
(X
i
),
x
′
= SSM(SiLU(Conv1D(x))),
X
o
= Proj
out
(SiLU(z) ∗x
′
).
(1)
ViM Block. In comparison to the Mamba block, the
ViM block (Zhu et al., 2024) (as shown in Fig. 2C)
features a forward branch and a backward branch that
process the projected input simultaneously in both di-
rections. The ViM block transforms an input X
i
into
an output X
o
through the following process:
x = Proj
x
(X
i
), z = Proj
z
(X
i
),
x
′
f
= SSM
f
(SiLU(Conv1D
f
(x))),
x
′
b
= SSM
b
(SiLU(Conv1D
b
(x))),
X
o
= Proj
out
(SiLU(z) ∗(x
′
f
+ x
′
b
)).
(2)
DBM Block. A DBM block (see Fig. 2D) shares
a similar idea with the ViM block, i.e., introducing a
backward branch. Differently, DBM blocks separate
the projection processes to create distinct inputs for
the Conv1D and SSM transformations. The parame-
ters of the Conv1D and SSM operations are shared.
The outputs from both branches are separately gated,
which are then concatenated and projected to gener-
ate the final output. The compressed features, X
o
, for
an input, X
i
, are defined as follows:
x
f
= Proj
x f
(X
i
), z
f
= Proj
xz
(X
i
),
x
b
= Proj
xb
(X
i
), z
b
= Proj
zb
(X
i
),
x
′
f
= SSM(SiLU(Conv1D(x
f
))),
x
′
b
= SSM(SiLU(Conv1D(x
b
))),
X
o
= Proj
out
(SiLU(z
f
) ∗(x
′
f
) ∥SiLU(z
b
) ∗x
′
b
).
(3)
Transformer or Mamba for Temporal Action Localization? Insights from a Comprehensive Experimental Comparison Study
153

3.3.4 Hybrid Architecture
A hybrid architecture combines the Transformer
block (or self-attention layer) with the Mamba block,
enabling the model to encode diverse dynamics. We
focus on the MambaFormer architecture (Park et al.,
2024) and the concurrent application of self-attention
and the Mamba block, e.g., CausalTAD (Liu et al.,
2024b), as described below.
MambaFormer. The MambaFormer (see Fig.
3A) combines Mamba with attention blocks. It re-
places the positional encoding and MLP block in the
standard Transformer block with two Mamba blocks.
The skip connections after each block, as used in the
Transformer block, are retained.
CausalTAD. CausalTAD (see Fig. 3B) extends
the dual design in the DBM block (Chen et al., 2024)
to the multi-head self-attention operation, resulting in
a causal attention block (CAB). Specifically, CAB re-
stricts the context of attention to only past or future
tokens. A CAB and a DBM-like block are utilized
to process the input simultaneously, aiming to capture
both long-range temporal relationships and causality
information.
Multi-Head
Attention
Mamba
Mamba
Attention
Branch
Mamba
Branch
Linear
concat
Linear
SiLU
Shared Weights
Forward
Operation
Backward
Operation
Linear Linear
SiLU
Linear
(A) (B)
Figure 3: Illustration of the hybrid architectures studied.
(A) The MambaFormer. (B) The concurrent application of
self-attention and Mamba block (top). The Attention and
Mamba Branches share a similar architecture (bottom), ex-
cept that in forward and backward operations, the Atten-
tion Branch uses multi-head self-attention while the Mamba
Branch uses Conv1D followed by an SSM layer. The pa-
rameters of the both operations are shared inside the Atten-
tion and Mamba Branches, respectively.
3.4 Training and Inference
For training, we employ a focal loss (Tian et al.,
2019) and distance Intersection over Union (IoU) loss
(Zheng et al., 2020) to optimize the action classifica-
tion and boundary distance regression, respectively.
For inference, we select a subset of the predictions
whose classification score is higher than a pre-defined
threshold. Finally, we use Soft-NMS (Bodla et al.,
2017) to remove duplicates.
4 EXPERIMENTS
In this section, we conduct experiments on different
TAL datasets to evaluate the performance of the stud-
ied temporal feature encoders, as discussed in Section
3.3. Given that the architecture of the models is fixed,
the only aspect that varies among them is the applied
temporal feature encoder, which influences their per-
formance. As a result, the performance of the mod-
els reflects the capabilities of the temporal feature en-
coders. Therefore, we assess the performance of the
trained models.
4.1 Datasets
We choose THUMOS14 (Idrees et al., 2017),
ActivityNet-1.3 (Heilbron et al., 2015), and EPIC-
KITCHENS-100 (Damen et al., 2018) for our exper-
iments. THUMOS14 and ActivityNet-1.3 are third-
person view human activity datasets, differing in size
and action durations. EPIC-Kitchens-100 is a first-
person view dataset with fine-grained in-door actions.
Such properties can assess TAL models from differ-
ent aspects. Specifically, THUMOS14 consists of 413
videos with 20 action classes, which we divided into a
training set of 213 videos and a test set of 200 videos,
following previous work (Zhang et al., 2022). The
models were trained on the training set and evaluated
on the test set. ActivityNet-1.3 (Heilbron et al., 2015),
with nearly 20,000 videos across 200 action classes,
was split into a training set of 10,024 videos, a valida-
tion set of 4,926 videos, and a test set of 5,044 videos.
Following previous practice (Zhang et al., 2022), we
trained the models on the training set and evaluated
them on the validation set. EPIC-KITCHENS-100,
which contains 100 hours of egocentric view activ-
ities, was split into a training and a validation set.
Similar to previous approach (Zhang et al., 2022), we
trained separate models for Verb and Noun actions on
the training set and assessed them on the validation
set.
4.2 Performance Metrics
The mean average precision (mAP) was used as a
metric to evaluate the overall performance of the
trained models. Following previous practice (Zhang
et al., 2022) (Zhang et al., 2024), the mAP calculated
at different temporal IoU (tIoU) thresholds and the av-
eraged mAP across all these thresholds are reported.
Specifically, the thresholds were set to [0.3:0.1:0.7]
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
154

for THUMOS14, [0.5:0.05:0.95] for ActivityNet-1.3,
and [0.1:0.1:0.5] for EPIC-KITCHENS-100. Besides,
the number of trainable parameters and FLOPs (float-
ing point operations) are also reported to evaluate the
model’s efficiency.
4.3 Implementations
Feature Extraction. Following previous work
(Zhang et al., 2022) (Zhang et al., 2024), we ex-
tract I3D (Carreira and Zisserman, 2017) features
for THUMOS14 and ActivityNet-1.3, and Slow-
Fast (Feichtenhofer et al., 2019) features for EPIC-
KITCHENS-100. Note that while TSP features (Al-
wassel et al., 2021) have demonstrated superior per-
formance on ActivityNet-1.3 (Zhang et al., 2022) (Shi
et al., 2023) compared to other feature extractors such
as I3D, we prioritize investigating temporal feature
encoders over using different features to enhance the
model’s performance. Using a consistent feature ex-
tractor across datasets enables a more insightful com-
parison of the generalizability of these encoders.
Experimental Setup. We re-implemented the
temporal feature encoders using PyTorch 2.1.2 with
CUDA version 12.1. The configuration of the feature
embedding layers and the action localization head
remained consistent with the methods described in
(Zhang et al., 2022) and (Chen et al., 2024). The
preprocessing step for handling variable-length inputs
(fixing the maximum input sequence length through
either padding or cropping) followed a similar ap-
proach to that in (Zhang et al., 2022). Each model was
trained from scratch on all datasets. The Adam opti-
mizer (Kingma and Ba, 2017), along with a warm-up
strategy (Liu et al., 2020), was employed for training.
During training, we optimized the number of epochs,
learning rate, batch size, window size (when using
sliding window attention), and the balance coefficient
for the classification and distance regression losses.
The training and testing processes were conducted on
a single NVIDIA GeForce RTX 3090 GPU.
4.4 Overall Performance
The overall performance, measured by mAP, is pre-
sented in Table 1 for THUMOS14 and ActivityNet-
1.3, and in Table 2 for EPIC-Kitchens-100.
We selected the Transformer block with a sliding
window attention-based model, i.e., ActionFormer
(Zhang et al., 2022), as the comparison point for ana-
lyzing the performance of the trained models, specifi-
cally the pure Mamba block-based methods and the
hybrid architectures that combine the Transformer
block and Mamba block.
It is worth noting that the retrained ActionFormer
models achieve different overall performance levels
compared to the reported results in (Zhang et al.,
2022). Similar differences are also observed for the
CausalTAD (Liu et al., 2024b) architecture. These
discrepancies may be attributed to variations in hard-
ware and software setups. Additionally, we used the
implementation from (Zhang et al., 2022) to handle
the training and testing data, which differs from the
implementation in CausalTAD (Liu et al., 2024b).
This may be another factor that has led to the observed
differences in performance for CausalTAD.
Performance on THUMOS14. On THUMOS14,
the original Mamba block-based model surpasses the
baseline at all tIoU thresholds, achieving an average
mAP of 68.5%, which is slightly higher than the base-
line of 67.9%. Furthermore, as can be observed, this
method achieves the best average mAP and outper-
forms all other studied methods at every tIoU thresh-
old, except at the threshold of 0.6, where its perfor-
mance is slightly lower than that of the CausalTAD
method (60.8% vs. 61.1%).
However, the other temporal feature encoders do
not demonstrate similar superior performance, even
for the ViM and DBM blocks, which share the most
similar architecture. This suggests that the backward
scanning implemented in these models may not en-
hance the representativeness of the learned features.
Additionally, the backward design may also influ-
ence the hybrid models, as evidenced by the Mam-
baFormer architectures, where the combination of at-
tention blocks—whether global attention or sliding
window attention—outperforms other configurations,
such as ViM or DBM in combination with attention
blocks. By contrast, the CausalTAD method, which
achieves the same average mAP as the baseline and
outperforms other hybrid variants, indicates that the
concurrent application of the Mamba block with at-
tention layers, along with the causal information en-
coded by the causal attention, may enhance the dis-
criminative power of the learned representations.
Despite these differences, we observed that the
gaps in average mAP among these models are not sig-
nificant. Additionally, we noticed that the original
Mamba block or DBM block-based methods gener-
ally perform better than others at higher tIoU thresh-
olds, such as at 0.6 and 0.7.
Performance on ActivityNet-1.3. As shown in
Table 1, both the pure Mamba block-based methods
and hybrid approaches outperform the pure Trans-
former block-based methods, with the CausalTAD
method achieving the best performance, surpassing
the baseline by an average margin of 0.9%. Addi-
tionally, the CausalTAD method demonstrates supe-
Transformer or Mamba for Temporal Action Localization? Insights from a Comprehensive Experimental Comparison Study
155

Table 1: Overall performance measured by mAP on THUMOS14 and ActivityNet-1.3. The mAP values calculated are those
at different tIoU thresholds and the averaged ones, i.e., [0.3:0.1:0.7] for THUMOS14 and [0.5:0.05:0.95] for ActivityNet-1.3.
TFE: Temporal feature encoder, Attn: attention, Win: Window.
Method TFE Block
THUMOS14 ActivityNet-1.3
tIoU (%) tIoU (%)
0.3 0.4 0.5 0.6 0.7 Avg. 0.5 0.75 0.95 Avg.
ActionFormer Transformer
Global Attn 83.3 78.8 71.7 59.8 44.5 67.6 54.4 36.4 7.3 35.7
Win Attn
*
83.3 79.5 71.9 60.2 45.0 67.9 54.4 36.8 8.4 36.0
ActionMamba Mamba
Mamba 83.3 79.7 72.3 60.8 46.1 68.5 54.5 37.5 7.4 36.3
ViM 82.6 79.1 71.5 59.6 44.6 67.5 55.4 37.8 8.0 36.8
DBM 82.9 78.8 71.3 60.2 45.6 67.8 55.2 37.5 7.8 36.7
MambaFormer Mamba + Attn
Mamba + Global Attn 82.3 79.1 70.9 60.3 45.7 67.7 55.0 37.3 7.4 36.5
Mamba + Win Attn 82.4 78.8 70.8 60.2 44.4 67.3 54.7 37.1 7.8 36.3
ViM + Global Attn 81.5 78.4 70.3 59.2 45.5 67.0 55.1 37.4 8.1 36.6
Vim + Win Attn 82.0 78.1 70.6 59.4 44.8 67.0 55.0 37.3 7.6 36.6
DBM + Global Attn 82.6 78.2 71.0 59.6 44.6 67.2 54.6 37.6 8.3 36.6
DBM + Win Attn 81.4 77.2 70.2 58.7 44.1 66.3 54.9 37.4 7.6 36.5
CausalTAD Mamba + Attn DBM + Global Causal Attn
*
82.4 79.0 71.9 61.1 44.9 67.9 55.3 37.8 8.9 36.9
*
Retrained models. Bold and underlined numbers indicate the best and second-best performances in each column, respectively.
rior performance at higher tIoU thresholds, particu-
larly at 0.95. Similar to THUMOS14, while these
methods exhibit differences in performance, they are
not significant.
Another interesting observation is that causal en-
coding appears to be an important factor for boosting
the model’s performance, as can be see from the mod-
els that integrate the ViM or DBM blocks.
Performance on EPIC-Kitchens-100. As shown
in Table 2, The best-performing methods on EPIC-
Kitchens-100 are the pure DBM block-based model
for Verb actions and the sequential integration of the
original Mamba block with sliding window atten-
tion model for Noun actions. The highest average
mAP surpasses the baseline by 1.1% for both Verb
and Noun actions. Additionally, pure Mamba block-
based models outperform others for Verb actions, par-
ticularly the ViM and DBM blocks, likely due to
their backward scanning design. For Noun actions,
the MambaFormer architecture appears to be the pre-
ferred choice, as the models in this category achieve
both the best and second-best overall performances.
Discussion. Based on the performance results,
it is clear that no single method consistently out-
performs others across all the datasets. This sug-
gests that a customized dataset may require a tailored
model. For instance, the pure original Mamba block-
based method may be suitable for datasets like THU-
MOS14, where action instances with short durations
account for the majority (Wu et al., 2021). A more
complex model, such as CausalTAD, should be cho-
sen for ActivityNet-1.3. For EPIC-Kitchens-100 Verb
actions, the pure DBM-based model is recommended,
while for Noun actions, the MambaFormer model—
specifically, the combination of the original Mamba
block with sliding window attention or the ViM block
with global attention—should be utilized. Alterna-
tively, the pure Mamba block-based models or their
hybrid counterparts could be selected for better gen-
eralization across all the datasets.
4.5 Efficiency Analysis
Model efficiency is a crucial factor to consider when
selecting a deep learning model for processing real-
world, large-scale data, especially when hardware re-
sources are limited. We present the number of train-
able parameters and FLOPs as efficiency metrics to
measure the model’s resource consumption. Specifi-
cally, a higher number of parameters indicates a larger
model that requires more memory, while FLOPs re-
flect the computational complexity.
We use Python library fvcore to count the num-
ber of parameters and FLOPs. For calculating FLOPs,
we follow the method described in (Zhang et al.,
2022), using a fixed-size tensor as input to the model.
Specifically, we use a tensor size of [1, 2408, 2304],
i.e., an input of 2304 time steps, for THUMOS14
models, [1, 2304, 160] for ActivityNet-1.3 models,
and [1, 2304, 2304] for EPIC-Kitchens-100 models.
As shown in Table 3, pure Mamba block-based
models exhibit the fewest parameters and consume
the least FLOPs. In contrast, CausalTAD has the
highest number of parameters and consumes the most
FLOPs. Compared to the Transformer models, Mam-
baFormer models generally consume a similar num-
ber of FLOPs while having more parameters due to
the integration of the Mamba blocks.
Discussion. Based on the efficiency performance,
pure Mamba block-based models are preferable when
computational resources are limited. Hybrid models
can serve as an alternative choice for improved per-
formance across different datasets when resources are
more readily available.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
156
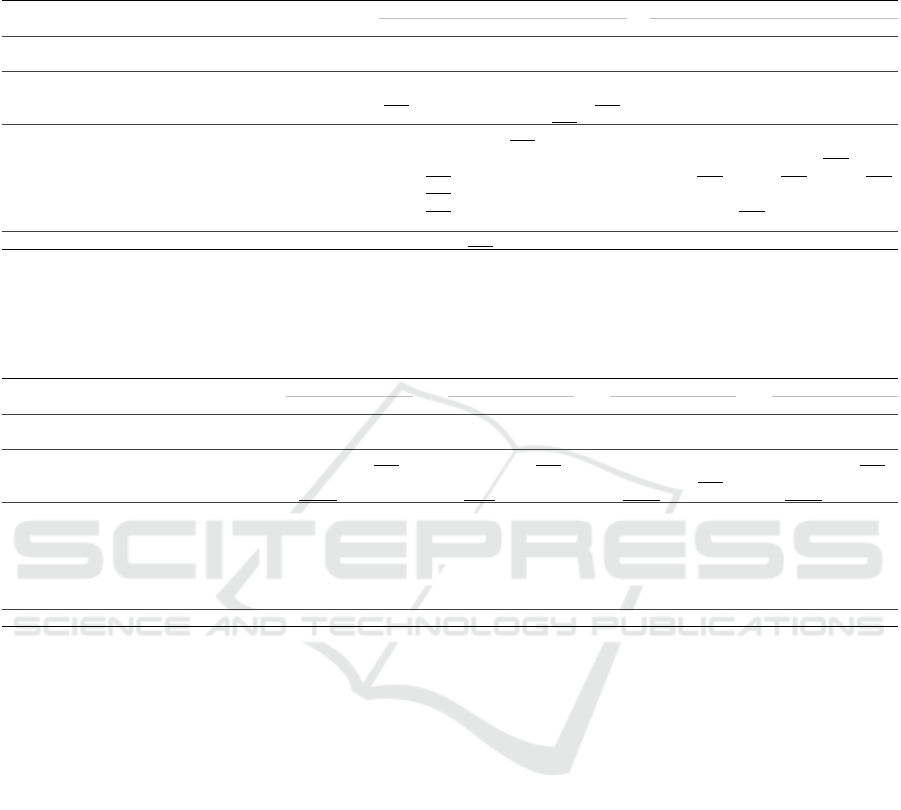
Table 2: Overall performance on EPIC-Kitchens-100. The presented results include mAP values at different tIoU thresholds,
ranging from [0.1:0.1:0.5], along with the averaged ones for both Verb and Noun actions. TFE: Temporal feature encoder,
Attn: attention, Win: Window.
Method TFE Block
Verb - tIoU (%) Noun - tIoU (%)
0.1 0.2 0.3 0.4 0.5 Avg. 0.1 0.2 0.3 0.4 0.5 Avg.
ActionFormer Transformer
Global Attn 26.9 25.9 24.5 22.5 18.9 23.7 25.2 24.1 22.4 20.0 16.2 21.6
Win Attn
*
26.5 25.4 24.3 22.4 19.3 23.6 24.7 23.6 22.0 19.6 16.0 21.2
ActionMamba Mamba
Mamba 26.6 25.6 23.9 22.2 19.6 23.6 25.5 24.2 22.6 20.4 16.8 21.9
ViM 27.5 26.3 25.1 22.6 19.0 24.1 25.2 24.2 22.4 20.0 16.8 21.7
DBM 28.0 27.2 25.7 23.2 19.4 24.7 24.8 23.7 21.9 19.8 15.3 21.1
MambaFormer Mamba + Attn
Mamba + Global Attn 27.0 25.9 24.5 22.8 19.0 23.9 25.5 24.2 22.6 20.4 16.8 21.9
Mamba + Win Attn 26.8 25.8 23.9 22.2 19.3 23.6 26.0 24.8 23.2 20.8 17.0 22.3
ViM + Global Attn 26.3 25.6 23.9 21.9 18.7 23.3 25.6 24.4 22.7 20.6 17.5 22.2
Vim + Win Attn 26.2 25.6 24.1 21.6 17.6 23.0 25.0 23.9 22.2 19.9 16.6 21.5
DBM + Global Attn 27.1 26.4 24.3 22.3 19.2 23.8 25.4 24.5 22.8 20.3 16.3 21.8
DBM + Win Attn 26.8 25.9 24.4 22.3 19.3 23.7 25.1 24.1 22.3 20.0 16.6 21.6
CausalTAD Mamba + Attn DBM + Global Causal Attn
*
26.9 26.2 24.6 22.4 18.8 23.8 25.6 24.5 22.7 20.2 16.3 21.9
*
Retrained models. Bold and underlined numbers indicate the best and second-best performances in each column, respectively.
Table 3: Efficiency measurements include the number of trainable parameters and FLOPs consumed by different models. The
number of parameters was calculated separately for the THUMOS14, ActivityNet-1.3, and EPIC-Kitchens-100 models using
the Python library fvcore. FLOPs were calculated for processing tensors of sizes [1, 2408, 2304] for THUMOS14 models,
[1, 2304, 160] for ActivityNet-1.3 models, and [1, 2304, 2304] for EPIC-Kitchens-100 models.
Method Block
THUMOS14 ActivityNet-1.3 EPIC - Verb EPIC - Noun
# Params FLOPs # Params FLOPs # Params FLOPs # Params FLOPs
ActionFormer
Global Attn 29.3M 115.4 8.1M 18.1 29.8M 118.4 30.1M 121.5
Win Attn 29.3M 45.3 8.1M 17.4 29.8M 93.2 30.1M 96.4
ActionMamba
Mamba 19.0M 33.0 5.6M 13.4 19.5M 69.0 19.8M 72.4
ViM 19.9M 37.8 5.9M 15.0 20.4M 78.5 20.7M 81.6
DBM 18.6M 37.8 5.5M 15.0 19.1M 78.7 19.4M 82.6
MambaFormer
Mamba + Global Attn 42.8M 106.0 11.6M 16.5 43.3M 109.0 43.6M 111.9
Mamba + Win Attn 42.8M 40.5 11.6M 15.9 43.3M 83.8 43.6M 86.8
ViM + Global Attn 43.8M 115.5 12.0M 18.1 44.3M 118.5 44.6M 121.4
ViM + Win Attn 43.8M 45.3 12.0M 17.5 44.3M 93.3 44.6M 96.3
DBM + Global Attn 42.3M 115.5 11.5M 18.1 42.8M 118.5 43.2M 121.8
DBM + Win Attn 42.3M 45.3 11.5M 17.5 42.8M 93.4 43.2M 96.7
CausalTAD DBM + Global Causal Attn 52.1M 161.5 13.9M 29.4 52.6M 164.6 52.9M 167.6
Bold and underline numbers indicate highest and lowest number of parameters and FLOPs in each column.
4.6 Sensitivity Analysis
Actions in videos often vary in length, ranging from
seconds to minutes. In addition, the number of ac-
tion instances is not uniformly distributed and the
type of actions may also vary a lot. These charac-
teristics make TAL a challenging task for deep learn-
ing models, which should effectively identify all ac-
tions. In this section, we present a sensitivity analy-
sis of the models evaluated on the THUMOS14 and
ActivityNet-1.3 datasets, offering an additional met-
ric for understanding the temporal feature encoders.
We use the tool presented in (Alwassel et al.,
2018) for analysis. To perform the analysis, we de-
fine coverage, length, and the number of instances.
Coverage refers to the relative length of the actions
compared to the entire video, while length denotes
the absolute duration of actions in seconds. Both
coverage and length are categorized into Extra Small
(XS), Small (S), Medium (M), Large (L), and Ex-
tra Large (XL). The number of instances refers to
the total count of instances from the same class in a
video, categorized into Extra Small (XS), Small (S),
Medium (M), and Large (L). The defined thresholds
for Coverage on both datasets are XS: (0,0.02], S:
(0.02,0.04], M: (0.04,0.06], L: (0.06,0.08], and XL:
(0.08,1.0]. For Length, the thresholds are XS: (0,3],
S: (3,6], M: (6,12], L: (12,18], and XL: >18 for THU-
MOS14, and XS: (0,30], S: (30,60], M: (60,120], L:
(120,180], and XL: >180 for ActivityNet-1.3. For the
number of instances, XS: 1, S: [2,40], M: [40,80], L:
>80 and XS: 1, S: [2,4], M: [4,8], L: >8 are used for
THUMOS14 and ActivityNet-1.3, respectively.
For each dataset, we selected the models with the
highest overall performance (see Table 1) from each
category to generate predictions for analysis.
On THUMOS14, the models perform well at pre-
dicting actions with short to large durations (see Fig.
4), particularly for small, medium, and large-duration
actions. However, performance drops significantly for
extra-large duration actions. The models also become
more sensitive to videos with a large number of action
instances. This behavior can be attributed to the char-
acteristics of the dataset: 1) action durations in THU-
Transformer or Mamba for Temporal Action Localization? Insights from a Comprehensive Experimental Comparison Study
157

MOS14 are relatively short, and 2) each video typ-
ically contains only one action class. Regarding 1),
the lack of sufficient long-duration actions makes the
models more adept at encoding context for shorter ac-
tions. For 2), videos with many action instances pro-
vide the model with more data, improving its gener-
alization capabilities on this kind of samples. Despite
these commonalities, pure Transformer block-based
models seem more effective at handling videos with a
higher number of action instances, and they also per-
form well with respect to absolute duration. Thus,
for videos featuring long durations and numerous ac-
tion instances, pure Transformer block-based models
may be a suitable choice. In other cases, the Mamba
block-based models might be more appropriate. An-
other viable option, though resource-intensive, is the
CausalTAD method, which demands greater compu-
tational resources.
For ActivityNet-1.3, the selected models demon-
strate stronger regression capabilities (see Fig. 5) as
action durations increase (likely because more con-
tinuous frames provide additional context about the
actions), but they perform less effectively on videos
with a large number of action instances. This de-
cline is particularly noticeable in pure Transformer
block-based models. Interestingly, however, these
pure Transformer block-based models excel at han-
dling extra-large duration, as the attention mechanism
allows the model to effectively encode necessary con-
text from the entire input. Therefore, they are more
suitable for videos with long-duration actions but
fewer action instances. For videos with short to rela-
tively long-duration actions, where Transformer mod-
els show weaker performance, Mamba block-enabled
models, especially the Mamba ViM block, are a better
choice. These models offer comparable performance
while being less complex than the alternatives that de-
liver superior performance but require more hardware
resources due to the global attention computation.
Discussion. Overall, for THUMOS14, the orig-
inal Mamba block-based model or the CausalTAD
model should be chosen based on performance re-
quirements. In the case of ActivityNet-1.3, the
CausalTAD should be prioritized for performance
needs, while the Mamba ViM-based method may be
more suitable if hardware resources are a concern.
However, it is important to note that the selection is
highly dataset-dependent. Pure Transformer block-
based methods can still be an excellent choice for de-
veloping real-world TAL applications, as they outper-
form other models in specific scenarios (as discussed
previously) while maintaining lower complexity than
their hybrid counterparts.
XS S M L XL XS S M L XL XS S M L
0
20
40
60
80
100
Average-mAP
N
(%)
74.1
75.9
69.6
72.0
57.0
Coverage
66.3
75.4
73.4
60.9
52.1
Length
75.4
73.1
78.3
87.0
# Instances
74.38
Coverage
Length
# Instances
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
1.4
Average-mAP
N
Relative Change
0.8
1.0
0.7
1.0
1.0
1.2
74.38
Transformer - Window Attention.
XS S M L XL XS S M L XL XS S M L
0
20
40
60
80
100
Average-mAP
N
(%)
74.5
78.8
72.2
78.5
62.6
Coverage
67.2
78.1
76.8
71.7
51.9
Length
78.1
75.0
78.1
84.9
# Instances
75.66
Coverage
Length
# Instances
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
Average-mAP
N
Relative Change
0.8
1.0
0.7
1.0
1.0
1.1
75.66
Mamba Original.
XS S M L XL XS S M L XL XS S M L
0
20
40
60
80
100
Average-mAP
N
(%)
73.5
78.2
74.5
68.2
57.3
Coverage
64.0
77.2
79.1
56.8
47.3
Length
70.1
74.2
77.3
85.6
# Instances
74.73
Coverage
Length
# Instances
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
Average-mAP
N
Relative Change
0.8
1.0
0.6
1.1
0.9
1.1
74.73
Mamba + Global Attention
XS S M L XL XS S M L XL XS S M L
0
20
40
60
80
100
Average-mAP
N
(%)
75.0
78.1
73.2
78.1
63.1
Coverage
66.8
77.7
79.7
68.4
53.8
Length
76.5
74.8
77.3
86.2
# Instances
75.52
Coverage
Length
# Instances
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
Average-mAP
N
Relative Change
0.8
1.0
0.7
1.1
1.0
1.1
75.52
Mamba DBM + Global Causal Attention
Figure 4: Sensitivity analysis on THUMOS14. The predic-
tions were produced by the models with the highest over-
all performance from each category. These include the
Transformer block with sliding window attention, the orig-
inal Mamba block, the MambaFormer architecture featur-
ing the original Mamba block with global attention, and
the CausalTAD architecture. The dashed line represents the
performance of the method across all instances in the ana-
lyzed dataset.
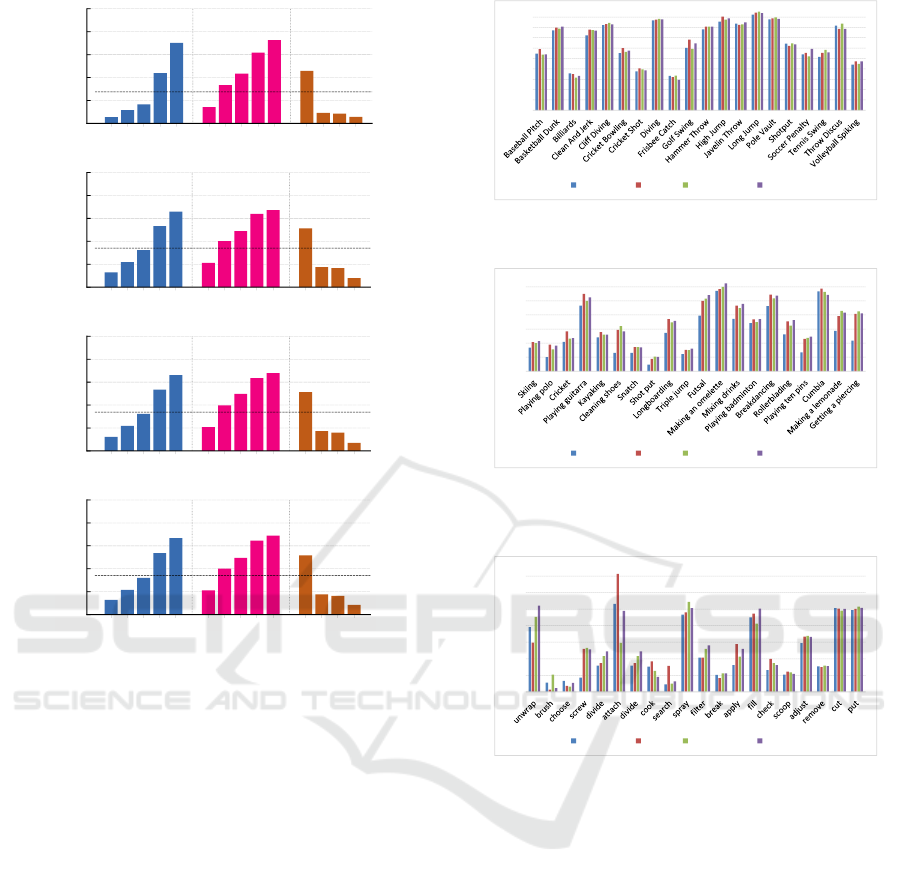
4.7 Class Level Analysis
In this section, we analyze the class-level perfor-
mance of the selected models. Fig. 6 presents the per-
class performance on THUMOS14. For ActivityNet-
1.3 and EPIC-Kitchens-100, we select a subset of 20
classes for illustration, based on the number of action
instances in each class. The selected classes range
from small to large in the number of instances. Fig.
7 shows the results for ActivityNet-1.3, while Fig. 8
and Fig. 9 present the results for the Verb and Noun
actions in EPIC-Kitchens-100, respectively.
For THUMOS14, the pure Mamba block-based
methods perform well on many classes. However,
they underperform on certain classes, such as “Soccer
Penalty”, “Tennis Swing”, and “Throw Discus”, com-
pared to hybrid models. This suggests that for classes
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
158
XS S M L XL XS S M L XL XS S M L
0
20
40
60
80
100
Average-mAP
N
(%)
5.5
11.7
16.7
43.9
70.3
Coverage
14.2
33.3
43.5
61.8
72.6
Length
45.9
9.3
8.6
5.7
# Instances
27.48
Coverage
Length
# Instances
0.5
1.0
1.5
2.0
2.5
3.0
Average-mAP
N
Relative Change
0.2
2.6
0.5
2.6
0.2
1.7
27.48
Transformer - Window Attention.
XS S M L XL XS S M L XL XS S M L
0
20
40
60
80
100
Average-mAP
N
(%)
12.9
21.9
32.3
53.3
66.0
Coverage
21.2
40.1
48.9
63.8
67.2
Length
51.3
17.5
16.7
7.9
# Instances
34.10
Coverage
Length
# Instances
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
2.25
Average-mAP
N
Relative Change
0.4
1.9
0.6
2.0
0.2
1.5
34.10
Mamba ViM.
XS S M L XL XS S M L XL XS S M L
0
20
40
60
80
100
Average-mAP
N
(%)
12.3
21.9
32.3
53.5
66.1
Coverage
20.8
39.7
49.7
63.5
67.9
Length
51.3
17.3
15.9
7.1
# Instances
33.88
Coverage
Length
# Instances
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
2.25
Average-mAP
N
Relative Change
0.4
2.0
0.6
2.0
0.2
1.5
33.88
Mamba DBM + Global Attention
XS S M L XL XS S M L XL XS S M L
0
20
40
60
80
100
Average-mAP
N
(%)
12.9
21.6
32.2
53.6
66.8
Coverage
21.1
40.1
49.4
64.6
68.9
Length
51.6
17.8
16.3
8.5
# Instances
34.25
Coverage
Length
# Instances
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
2.25
Average-mAP
N
Relative Change
0.4
2.0
0.6
2.0
0.2
1.5
34.25
Mamba DBM + Global Causal Attention
Figure 5: Sensitivity analysis on ActivityNet-1.3. The best-
performing models in each category were selected for gen-
erating the outputs, specifically the Transformer block with
sliding window attention, the Mamba ViM block, the Mam-
baFormer architecture equipped with Mamba DBM block
and global attention, and the CausalTAD architecture. The
dashed line represents the performance of the method across
all instances in the analyzed dataset.
where background scenes dominate the frames, a hy-
brid encoder may be preferable for capturing stronger
contextual information.
On ActivityNet-1.3, it is surprising that none of
the models can handle certain activities, such as “Ski-
ing” and “Shot Put”, despite these activities having a
relatively large number of action instances (over 210)
and total durations (over 10,000 seconds). The wide
variation in durations (ranging from 0.01 to over 210
seconds) may be a contributing factor. Nevertheless,
pure Mamba block-based and hybrid models outper-
form pure Transformer-based models.
For EPIC-Kitchens-100, we observe a similar is-
sue where none of the models perform well on certain
actions, such as “brush”, “choose”, and “break” in the
verb category, and “bacon”, “floor”, and “sausage” in
the noun category. These actions exhibit wide vari-
ations in duration and a small number of instances,
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Transformer Mamba MambaF ormer CausalTAD
Figure 6: Per-class performance on THUMOS14, reported
as averaged mAPs across tIoU thresholds [0.3:0.1:0.7].
0
0.1
0.2
0.3
0.4
0.5
0.6
Transformer Mamba MambaFormer CausalTAD
Figure 7: Per-class performance on ActivityNet-1.3 with
20-class subset, reported as averaged mAPs across tIoU
thresholds [0.5:0.05:0.95].
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Transformer Mamba MambaFormer CausalTAD
Figure 8: Per-class performance on EPIC-Kitchens-100
Verb actions with a 20-class subset, reported as averaged
mAPs across tIoU thresholds [0.1:0.1:0.5].
which may limit the models’ effectiveness. However,
in most cases, pure Mamba block-based and hybrid
models outperform pure Transformer-based models
and are generally the better choice.
Finally, we visualize some predicted outputs from
THUMOS14 test set. As shown in Fig. 10, the pure
Mamba block-based method aligns better for both
very short and relatively long-duration actions, in line
with previous analysis.
Discussion. When handling actions with varied
durations, which may lack sufficient data for training
or cause confusion due to background scenes, Mamba
block-enabled models should be preferred.
4.8 Scalability Analysis
Scaling up a deep learning model by increasing the
number of parameters may improve its performance.
Transformer or Mamba for Temporal Action Localization? Insights from a Comprehensive Experimental Comparison Study
159

0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Transformer Mamba MambaFormer CausalTAD
Figure 9: Per-class performance on EPIC-Kitchens-100
Noun actions with a 20-class subset, reported as averaged
mAPs across tIoU thresholds [0.1:0.1:0.5].
(B) Action: Baseball Pitch; Duration: 0.9 s.
144.7 Ground Truth 145.6
144.6 Transformer (Win Attn) 146.6
144.5 Mamba + Global Attn 146.5
144.5 Mamba DBM + Global Causal Attn 146.5
144.5 Mamba Original 145.8
22.3 Ground Truth 27.2
22.2 Transformer (Win Attn) 27.2
22.3 Mamba + Global Attn 27.3
22.2 Mamba DBM + Global Causal Attn 27.1
22.3 Mamba Original 27.2
(A) Action: High Jump; Duration: 4.9 s.
Figure 10: Predictions from THUMOS14 test set. (A) All
methods are capable of handling relatively long actions. (B)
For shorter actions, the pure Mamba block-based methods
demonstrate better performance.
In this section, we perform an ablation analysis by
adding an additional original Mamba block to each
level of the encoder, aiming to match the parameter
count of the Transformer-based method. The model’s
performance after scaling is evaluated on the THU-
MOS14 dataset. The resulting mAPs, the number of
parameters, and FLOPs are presented in Table 4.
Table 4: Scalability Analysis for the original Mamba block.
Encoder 0.3 0.4 0.5 0.6 0.7 Avg # Params FLOPs
Win Attn 83.3 79.5 71.9 60.2 45.0 67.9 29.3M 115.4
Mamba 83.3 79.7 72.3 60.1 46.1 68.5 19.0M 33.0
Scaled 83.5 79.0 71.9 60.2 46.8 68.3 30.9M 40.2
The number of parameters after scaling is 30.9M,
which is comparable to that of the Transformer block
with sliding window attention. As observed, the over-
all performance has slightly decreased compared to
the original Mamba block prior to scaling. It is possi-
ble that, at this stage, the model is beginning to expe-
rience overfitting.
Discussion. The results indicate that scaling up
the model does not improve performance on THU-
MOS14, suggesting that simpler models are better
suited for smaller datasets to prevent overfitting dur-
ing training. For larger datasets like ActivityNet-1.3,
more complex models may be necessary to meet per-
formance requirements. For example, the CausalTAD
method achieves the best results (see Table 1) on
ActivityNet-1.3 with the highest number of parame-
ters (see Table 3). Additionally, data augmentation
techniques can be used for smaller datasets to enrich
training samples to exploit the learning capacity of
complex models.
4.9 Summary and Suggestion
Finally, we summarize our suggestions (in Table 5)
based on the analysis, including performance (P),
model efficiency (E), handling short (S) and long (L)
duration actions, dealing with varied durations and
limited data in each class (C), and data efficiency (D).
Table 5: Suggested feature encoders on each dataset. Small
number indicates better method. The last column shows the
best method, considering all performance requirements.
THUMOS14
Win Attn Mamba Original Mamba + Global Attn CausalTAD
P 2 1 4 3
Mamba Original
E 2 1 3 4
S 4 1 3 2
L 4 2 3 1
C 4 1 2 3
D 3 1 4 2
ActivityNet-1.3
Win Attn Mamba ViM DBM + Global Attn CausalTAD
P 4 2 3 1
Mamba ViM
E 2 1 3 4
S 4 1 3 2
L 4 2 3 1
C 4 1 2 3
D 4 3 2 1
EPIC-Kitchens-100 Verb
Global Attn Mamba DBM Mamba + Global Attn CausalTAD
P 4 1 2 3
Mamba DBM
E 2 1 2 4
S 3 4 2 1
L 1 2 4 3
C 3 4 1 2
D 1 3 4 2
EPIC-Kitchens-100 Noun
Global Attn Mamba Mamba + Win Attn CausalTAD
P 4 2 1 3
Mamba + Win Attn
E 2 1 3 4
S 1 4 3 2
L 4 2 3 1
C 4 3 2 1
D 4 2 1 3
5 CONCLUSIONS
In this work, we conducted a comparative analysis
of the Transformer encoder, Mamba block, and their
combinations as temporal feature encoders for TAL
tasks across three commonly used benchmarks of var-
ious human actions. This comparison addresses the
question of how to choose between the Transformer
encoder and the Mamba block. Our findings suggest
that both pure Mamba block-based models and hy-
brid models generally outperform those based on the
Transformer encoder. However, the improved perfor-
mance of the hybrid models comes at the expense
of increased complexity. Therefore, pure Mamba
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
160

block-based models should be the preferred choice for
developing TAL applications, especially given per-
formance requirements and potential limitations in
high-performance hardware resources. Additionally,
we found that learning temporal dependencies in se-
quences from both directions—specifically through
the ViM and DBM blocks, which incorporate a back-
ward scanning process—can enhance the model’s per-
formance for TAL.
We focused our analysis on a limited set of hybrid
models. However, there are several other approaches
to building hybrid models, such as those proposed in
(Hatamizadeh and Kautz, 2024) and (Behrouz et al.,
2024). One potential direction for future work could
be exploring the adaptation of these architectures for
TAL. Another avenue for future research would be de-
veloping models that leverage both the simplicity and
performance of Mamba blocks, as well as their dual
scanning capability.
ACKNOWLEDGEMENTS
This work has been partially supported by the Span-
ish project PID2022-136436NB-I00 and by ICREA
under the ICREA Academia programme.
REFERENCES
Alwassel, H., Caba Heilbron, F., Escorcia, V., and Ghanem,
B. (2018). Diagnosing error in temporal action detec-
tors. In ECCV.
Alwassel, H., Giancola, S., and Ghanem, B. (2021). Tsp:
Temporally-sensitive pretraining of video encoders
for localization tasks. In ICCV, pages 3173–3183.
Behrouz, A., Santacatterina, M., and Zabih, R. (2024).
Mambamixer: Efficient selective state space mod-
els with dual token and channel selection. arXiv
2403.19888.
Bisong, E. and Bisong, E. (2019). Recurrent neural net-
works (rnns). Building Machine Learning and Deep
Learning Models on Google Cloud Platform: A Com-
prehensive Guide for Beginners, pages 443–473.
Bodla, N., Singh, B., Chellappa, R., and Davis, L. S. (2017).
Soft-nms — improving object detection with one line
of code. In 2017 ICCV, pages 5562–5570.
Carreira, J. and Zisserman, A. (2017). Quo vadis, action
recognition? a new model and the kinetics dataset. In
2017 CVPR, pages 4724–4733.
Chen, G., Huang, Y., Xu, J., Pei, B., Chen, Z., Li, Z., Wang,
J., Li, K., Lu, T., and Wang, L. (2024). Video mamba
suite: State space model as a versatile alternative for
video understanding. arXiv 2403.09626.
Chen, G., Zheng, Y., Wang, L., and Lu, T. (2022). DCAN:
improving temporal action detection via dual context
aggregation. In AAAI 2022, pages 248–257.
Damen, D., Doughty, H., Farinella, G. M., Fidler, S.,
Furnari, A., Kazakos, E., Moltisanti, D., Munro, J.,
Perrett, T., Price, W., and Wray, M. (2018). Scal-
ing egocentric vision: The epic-kitchens dataset. In
ECCV.
Elharrouss, O., Almaadeed, N., and Al-Maadeed, S. (2021).
A review of video surveillance systems. J Vis Com-
mun Image Represent, 77:103116.
Feichtenhofer, C., Fan, H., Malik, J., and He, K. (2019).
Slowfast networks for video recognition. In 2019
ICCV, pages 6201–6210, Los Alamitos, CA, USA.
Fu, D. Y., Dao, T., Saab, K. K., Thomas, A. W., Rudra, A.,
and R
´
e, C. (2023). Hungry Hungry Hippos: Towards
language modeling with state space models. In Inter-
national Conference on Learning Representations.
Ghosh, I., Ramasamy Ramamurthy, S., Chakma, A., and
Roy, N. (2023). Sports analytics review: Artificial
intelligence applications, emerging technologies, and
algorithmic perspective. WRIEs Data Min. Knowl.
Discov., 13(5):e1496.
Gong, G., Zheng, L., and Mu, Y. (2020). Scale matters:
Temporal scale aggregation network for precise action
localization in untrimmed videos. In 2020 ICME.
Gu, A. and Dao, T. (2023). Mamba: Linear-time se-
quence modeling with selective state spaces. arXiv
2312.00752.
Gu, A., Goel, K., and R
´
e, C. (2022). Efficiently modeling
long sequences with structured state spaces. In The In-
ternational Conference on Learning Representations.
Gu, A., Johnson, I., Goel, K., Saab, K., Dao, T., Rudra,
A., and R
´
e, C. (2021). Combining recurrent, convo-
lutional, and continuous-time models with linear state
space layers. NIPS’21, 34:572–585.
Hatamizadeh, A. and Kautz, J. (2024). Mambavision: A
hybrid mamba-transformer vision backbone. arXiv
2407.08083.
Heilbron, F. C., Escorcia, V., Ghanem, B., and Niebles, J. C.
(2015). Activitynet: A large-scale video benchmark
for human activity understanding. In 2015 CVPR.
Idrees, H., Zamir, A. R., Jiang, Y.-G., Gorban, A., Laptev,
I., Sukthankar, R., and Shah, M. (2017). The THU-
MOS challenge on action recognition for videos “in
the wild”. Comput. Vis. Image Underst., 155:1–23.
Kalman, R. E. (1960). A New Approach to Linear Filtering
and Prediction Problems. J. Basic Eng., 82(1):35–45.
Kang, T.-K., Lee, G.-H., Jin, K.-M., and Lee, S.-W. (2023).
Action-aware masking network with group-based at-
tention for temporal action localization. In 2023
WACV, pages 6047–6056.
Kay, W., Carreira, J., Simonyan, K., Zhang, B., Hillier, C.,
Vijayanarasimhan, S., Viola, F., Green, T., Back, T.,
Natsev, P., Suleyman, M., and Zisserman, A. (2017).
The kinetics human action video dataset.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization. In 3rd ICLR Proceedings.
Lecun, Y., Boser, B., Denker, J., Henderson, D., Howard,
R., Hubbard, W., and Jackel, L. (1990). Handwritten
Transformer or Mamba for Temporal Action Localization? Insights from a Comprehensive Experimental Comparison Study
161

digit recognition with a back-propagation network. In
Touretzky, D., editor, NIPS 1989, volume 2.
Lin, C., Xu, C., Luo, D., Wang, Y., Tai, Y., Wang, C., Li, J.,
Huang, F., and Fu, Y. (2021). Learning salient bound-
ary feature for anchor-free temporal action localiza-
tion. In CVPR, pages 3320–3329.
Liu, H., Dai, Z., So, D. R., and Le, Q. V. (2024a). Pay
attention to mlps. In NIPS’21, Red Hook, NY, USA.
Liu, L., Liu, X., Gao, J., Chen, W., and Han, J. (2020).
Understanding the difficulty of training transformers.
In Proceedings of EMNLP 2020.
Liu, S., Sui, L., Zhang, C.-L., Mu, F., Zhao, C., and
Ghanem, B. (2024b). Harnessing temporal causal-
ity for advanced temporal action detection. arXiv
2407.17792.
Liu, X., Wang, Q., Hu, Y., Tang, X., Zhang, S., Bai, S., and
Bai, X. (2022). End-to-end temporal action detection
with transformer. IEEE Trans Image Process.
Park, J., Park, J., Xiong, Z., Lee, N., Cho, J., Oymak,
S., Lee, K., and Papailiopoulos, D. (2024). Can
mamba learn how to learn? A comparative study on
in-context learning tasks. In Salakhutdinov, R., Kolter,
Z., Heller, K., Weller, A., Oliver, N., Scarlett, J., and
Berkenkamp, F., editors, Proceedings of the 41st In-
ternational Conference on Machine Learning, pages
39793–39812.
Saleem, G., Bajwa, U. I., and Raza, R. H. (2023). Toward
human activity recognition: a survey. Neural Comput-
ing and Applications, 35(5):4145–4182.
Scarselli, F., Gori, M., Tsoi, A. C., Hagenbuchner, M., and
Monfardini, G. (2009). The graph neural network
model. IEEE Trans Neural Networks, 20(1):61–80.
Shao, J., Wang, X., Quan, R., Zheng, J., Yang, J., and Yang,
Y. (2023). Action sensitivity learning for temporal
action localization. In 2023 IEEE ICCV Proceeding,
pages 13411–13423, Los Alamitos, CA, USA.
Shi, D., Zhong, Y., Cao, Q., Ma, L., Lit, J., and Tao,
D. (2023). Tridet: Temporal action detection with
relative boundary modeling. In 2023 CVPR, pages
18857–18866, Los Alamitos, CA, USA.
Sridhar, D., Quader, N., Muralidharan, S., Li, Y., Dai, P.,
and Lu, J. (2021). Class semantics-based attention for
action detection. In 2021 ICCV, pages 13719–13728,
Los Alamitos, CA, USA.
Tian, Z., Shen, C., Chen, H., and He, T. (2019). Fcos:
Fully convolutional one-stage object detection. In
2019 ICCV, pages 9626–9635.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L. u., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
Neural Information Processing Systems, volume 30.
Wu, J., Sun, P., Chen, S., Yang, J., Qi, Z., Ma, L., and Luo,
P. (2021). Towards high-quality temporal action de-
tection with sparse proposals. arXiv 2109.08847.
Zhang, C.-L., Wu, J., and Li, Y. (2022). Actionformer:
Localizing moments of actions with transformers. In
ECCV 2022, volume 13664, pages 492–510.
Zhang, Z., Palmero, C., and Escalera, S. (2024). Dualh: A
dual hierarchical model for temporal action localiza-
tion. In 2024 FG Conference, pages 1–10.
Zhao, C., Liu, S., Mangalam, K., and Ghanem, B. (2023).
Re2tal: Rewiring pretrained video backbones for re-
versible temporal action localization. In 2023 CVPR,
pages 10637–10647, Los Alamitos, CA, USA.
Zhao, C., Thabet, A., and Ghanem, B. (2021). Video self-
stitching graph network for temporal action localiza-
tion. In 2021 ICCV, pages 13638–13647.
Zheng, Z., Wang, P., Liu, W., Li, J., Ye, R., and Ren, D.
(2020). Distance-iou loss: Faster and better learning
for bounding box regression. In The AAAI Conference
on Artificial Intelligence (AAAI), pages 12993–13000.
Zhu, L., Liao, B., Zhang, Q., Wang, X., Liu, W., and Wang,
X. (2024). Vision mamba: Efficient visual represen-
tation learning with bidirectional state space model.
arXiv 2401.09417.
Zhu, Z., Tang, W., Wang, L., Zheng, N., and Hua, G. (2021).
Enriching local and global contexts for temporal ac-
tion localization. In 2021 ICCV, pages 13496–13505,
Los Alamitos, CA, USA.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
162
