
Urban Re-Identification: Fusing Local and Global Features with
Residual Masked Maps for Enhanced Vehicle Monitoring in Small
Datasets
William A. Ramirez
a
, Cesar A. Sierra Franco
b
, Thiago R. da Motta
c
and Alberto Raposo
d
Pontifical Catholic University of Rio de Janeiro, Brazil
Keywords:
Urban Re-Identification, Dilated Region Proposal, Local and Global Attribute Fusion, Residual Connection
Modules, Multi-Object Tracking.
Abstract:
This paper presents an optimized vehicle re-identification (Re-ID) approach focused on small datasets. While
most existing literature concentrates on deep learning techniques applied to large datasets, this work addresses
the specific challenges of working with smaller datasets, mainly when dealing with incomplete partitioning
information. Our approach explores automated regional proposal methods, examining residuality and uniform
sampling techniques for connected regions through statistical methods. Additionally, we integrate global and
local attributes based on mask extraction to improve the generalization of the learning process. This led to a
more effective balance between small and large datasets, achieving up to an 8.3% improvement in Cumulative
Matching Characteristics (CMC) at k=5 compared to attention-based methods for small datasets. We improved
generalization regarding context changes of up to 13% in CMC for large datasets. The code, model, and
DeepStream-based implementations are available at https://github.com/will9426/will9426-automatic-Region-
proposal-for-cars-in-Re-id-models.
1 INTRODUCTION
Re-identification in urban areas, and generally in un-
common classes, often falls into small dataset scenar-
ios. In these cases, video frames with a temporal rela-
tionship and tracking information from one or multi-
ple cameras are commonly considered. This field can
involve various types of approaches categorized into
Mask-Guided Models (Song et al., 2018; Kalayeh
et al., 2018; Zhang et al., 2020; Lv et al., 2024),
Stripe-Based Methods (Luo et al., 2019b; Wang et al.,
2018; Fan et al., 2019), Attention-Based Methods
(Si et al., 2018; Chen et al., 2021), and GAN-Based
Methods (Jiang et al., 2021), often supplemented by
re-ranking methods (Luo et al., 2019a). The previ-
ously mentioned techniques result from challenges
focused on data availability and the need to extract in-
creasingly deeper and more representative attributes.
Mask-guided models often entail additional costs in
annotation or inference, as it is necessary to have a
a
https://orcid.org/0000-0003-1060-1523
b
https://orcid.org/0000-0002-5825-8798
c
https://orcid.org/0000-0002-9579-5867
d
https://orcid.org/0000-0001-7279-1823
process for detecting parts of the instances. (Zhang
et al., 2020) shows how this can involve an addi-
tional annotation task in exchange for optimizing
the identification process due to the availability of
more contextual information. On the other hand,
Stripe-Based Methods highlight another possible ap-
proach to global and localized attribute extraction, us-
ing statistical methods to propose areas that may be
more representative, shifting the annotation cost to a
method embedded within the model. Regarding the
use of attention modules along with partition-based
techniques, (Zhang et al., 2020) points out the fusion
of local and global attributes using squeeze and exci-
tation layers (SElayers) and attention, achieving im-
provements of up to 1.2% in the Cumulative Match-
ing Characteristics (CMC), a metric specialized in re-
identification. Each of these methods presents trade-
offs: Mask-guided models offer fine-grained detail
but require extensive annotation, increasing complex-
ity; Stripe-Based Methods simplify this at the risk of
oversimplifying regions of interest; Attention-Based
Methods balance attribute fusion but may overfit or
add computational overhead; and GAN-Based Meth-
ods provide flexibility in augmenting data but can be
computationally intensive and challenging to stabi-
574
Ramirez, W. A., Franco, C. A. S., R. da Motta, T. and Raposo, A.
Urban Re-Identification: Fusing Local and Global Features with Residual Masked Maps for Enhanced Vehicle Monitoring in Small Datasets.
DOI: 10.5220/0013176300003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
574-581
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

lize.
This paper addresses the challenges associated
with small datasets by studying algorithms for effi-
cient region estimation and improving feature map
diversity to enhance model generalization. We ex-
plore using statistical methods and attribute extrac-
tion techniques to create connected areas, proposing
more representative regions or stripes that lead to fea-
ture maps with greater representativeness. The pro-
posed model consists of three branches: localized fea-
ture maps (using RPN), globalized features (leverag-
ing the backbone and our custom attribute extraction
block), and base features from the backbone. Our
case study uses the VRIC and VeRi datasets, includ-
ing cross-validation experiments with mixed training
and testing configurations, specifically Vric− >VeRi
and VeRi− >Vric. Our approach builds on the base-
line established in (Zhang et al., 2020; Luo et al.,
2019a), which emphasizes the use of camera-guided
partitioned attention and attribute fusion while dis-
cussing the limitations associated with this module.
In summary, the main contributions of our work
are as follows:
• We propose an optimized approach for region ex-
traction, demonstrating how the use of statistical
methods like Monte Carlo can be helpful for stripe
extraction while simultaneously showing how us-
ing the same backbone to propose regions can be
a successful path to achieving a more balanced
model in terms of response to variance.
• We propose a validation method for the trained
model, introducing the concept of cross-inference
between two datasets with the same category
about the instance but with apparent differences
in context and resolution. We aim to demonstrate
that the trained model can be used in other con-
texts.
• Based on the challenges discussed around re-
identification, we proposed a computationally bal-
anced and reliable model to establish a real-time
baseline using DeepStream.
1.1 Data Augmentation
Deep learning approaches are often highlighted for
their reliance on large datasets. Data augmentation
has emerged as a valuable strategy in the context of
re-identification with small datasets. Techniques such
as grayscale conversion, random erasing, image ori-
entation flips, and zooming generate synthetic data
with some variability (Gong et al., 2021; Jiang et al.,
2021). Similarly, Generative Networks (Zheng et al.,
2019; He et al., 2023; Karras et al., 2020; Karras et al.,
2021) have proven effective in increasing variability
in small datasets with low variability, facilitating data
augmentation in labeled Re-identification datasets.
In the context of GANs, DG-Net (Zheng et al.,
2019) emphasizes its ability to generalize key features
such as pose and clothing. The model incorporates a
feature disentangling module and reconstruction loss,
enhancing cross-domain generation. DG-GAN (He
et al., 2023) aims to learn from defects or irregular
regions. DG-GAN architecture includes two genera-
tors and four discriminators across two domains, en-
hancing synthetic data generation for pattern recog-
nition in land surfaces, such as roads or open areas.
The StyleGAN architecture has gained attention in re-
cent years for its contributions to synthetic datasets
(Karras et al., 2020; Karras et al., 2021). StyleGAN3
(Karras et al., 2021), represents a significant advance-
ment in computer vision, albeit with high computa-
tional demands. StyleGAN3 employs components
like the Mapping Network, Synthesis Network, and
Weight Demodulation to provide fine control over im-
age style while effectively addressing aliasing, result-
ing in high-quality images without noise associated
with generative learning.
1.2 Baseline for ReID
In the past decade, ReID methods have evolved into
several categories: Mask-Guided Models, Stripe-
Based Methods, Pose-Guided Methods, Attention-
Based Methods, and GAN-Based Methods, often with
re-ranking techniques to address data limitations and
identification challenges. Mask-guided models use
instance-specific masks derived from segmentation or
detection (Song et al., 2018; Kalayeh et al., 2018;
Zhang et al., 2020; Lv et al., 2024), combining lo-
cal and global attributes. Despite the additional pro-
cessing costs, they enhance matching performance,
achieving up to 93% for CMC@5 (Zhang et al., 2020;
Lv et al., 2024). Stripe-based methods segment im-
ages to create local embeddings, as seen in (Luo et al.,
2019b; Wang et al., 2018; Fan et al., 2019; Fawad
et al., 2020). However, alignment issues challenge
these methods, leading to approaches like Aligne-
dReID++ (Luo et al., 2019b), which reported a 3%
improvement in Rank-1 accuracy compared to mod-
els without alignment. Attention-based methods ex-
tract discriminative features without explicit masks
(Si et al., 2018; Chen et al., 2021). While effec-
tive for large datasets, they face overfitting issues
in smaller ones. For instance, (Chen et al., 2021)
reported a 9% improvement in MAP@5 for larger
datasets. Gan-based methods address small dataset
limitations by generating synthetic data. For exam-
Urban Re-Identification: Fusing Local and Global Features with Residual Masked Maps for Enhanced Vehicle Monitoring in Small Datasets
575

ple, (Jiang et al., 2021) enhanced person category
diversity using GANs, achieving a 1% improvement
in CMC@1. Batch Normalization improves training
stability and generalization for large datasets. (Luo
et al., 2019a) demonstrated up to a 6% enhancement
for CMC@1.
2 METHOD
2.1 Dilated Region Proposal for Cars
(DRPC)
We proposed a module inspired by (Chen et al.,
2023; Lv et al., 2024), where we use the ResNet-
50 backbone to propose regions. Initially, we use
the first layer of our backbone, where we extract
low-level features. In this layer, with tensor dimen-
sions [B, C, H, W], a feature map is generated as
F = ResNet(input tensor). We then average across
the channel dimension to obtain a 2D representation
of the feature magnitudes, as shown in Eq. 1.
M
avg
(b, h, w) =
1
C
out
C
out
∑
c=1
F(b, c, h, w) (1)
Where M
avg
is the average tensor with dimensions
[B, 1, H
out
,W
out
].
To create a candidate region based on Eq. 2, we
use an adaptative threshold over the global average
value of M
avg
:
M
avg
(b, h, w) =
(
1 if M
avg
(b, h, w) > µ
avg
0 if M
avg
(b, h, w) ≤ µ
avg
(2)
Where µ
avg
is the global average value of M
avg
de-
scribed on Eq. 3.
µ
avg
=
1
B · H
out
·W
out
B
∑
b=1
H
out
∑
h=1
W
out
∑
w=1
M
avg
(b, h, w) (3)
Thus, we obtain a binary candidate mask that
highlights areas of interest based on the feature map
extracted. However, our goal is to create regions
around these initially highlighted characteristics in
stripes, aiming for the model to emphasize contours
and other low-level features of the pre-selected area.
To create the areas, we initialize a mask M
regions
with dimensions [B, N, H
out
,W
out
], where N is the
number of desired regions. Each vertical stripe is ex-
tracted and dilated. Consider a stripe R with dimen-
sions [H
out
, width], where ‘width‘ is the width of the
stripe. The dilation is performed using a structural
operation that expands the stripe. If R is the original
stripe and D is the result after dilating R, as shown in
Eq. 4:
D
dilated
= R ⊕ K (4)
Where ⊕ denotes the morphological dilation and
K is a dilation kernel (in this case, a matrix of ones).
Finally, the dilated stripe D
dilated
is assigned to the re-
gion mask M
regions
in the corresponding position, Eq.
[5,6] describe the proposed region and the result in
the extraction within the proposed area.
M
regions
(b, i, :, start
i
: end
i
) = D
dilated
(5)
F
prop
n
= F ⊙ M
regions
(6)
2.2 Quasi-Monte Carlo for Proposal
Regions (QMCPR)
This section introduces the use of Quasi-Monte
Carlo (QMC) to generate proposal regions without
relying on pre-annotated masks or outputs from seg-
menters or detectors. Strips x
n
are defined in a unit
space [0, 1]
d
using the Halton sequence, which dis-
tributes points uniformly. For the two-dimensional
case d = 2, each strip x
n
= (x
n
, y
n
) is derived using
bases b
1
and b
2
, as shown in Eq. 7.
x
n
= (φ
b
1
(n), φ
b
2
(n)) (7)
where φ
b
(n) is the inverse radical function in base
b, which converts an integer n into a fraction in base
b. Initially, the most statistically discriminative ar-
eas are selected through a histogram analysis of the
instance-level image to restrict the search areas and
highlight the discriminative areas. Based on this anal-
ysis, greater weight is given to the bases in the most
relevant regions.
Subsequently, the QMC method is applied to dis-
tribute the strips in these areas, ensuring that the strips
cover at least 15% of the total width or length of the
image, which is crucial to guarantee that the strips
contain sufficient visual context. This strategy is ben-
eficial for providing variability of context or informa-
tion to the model, allowing the model to relate the
instance from a smaller context. The generated strips
x
n
are originally fractions within the range [0, 1]. To
adapt them to the image space of size H ×W (where H
and W are the dimensions of the image), these points
are scaled to the appropriate range, as shown in Eq. 8.
p
n
= x
n
×
W − w
m
H − h
m
(8)
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
576

where w
m
and h
m
are the dimensions of the pro-
posed mask. The scaled values p
n
= (p
x
, p
y
) are
rounded to obtain the pixel indices (x
start
, y
start
) where
the mask will begin in the image. For each generated
strip p
n
, a binary strip mask M
n
of size w
m
× h
m
is
defined in an image of size H × W . Eq. 9 shows the
cases for generating the strip.
M
n
(i, j) =
1 if
x
start
≤ i < x
start
+ w
m
y
start
≤ j < y
start
+ h
m
0 otherwise
(9)
Where (i, j) are the pixel indices in the image, the
masks M
n
are used to propose specific regions of the
image that are then processed to extract a series of
features. F is an image feature obtained from an in-
termediate layer of the network, so by applying the
mask M
n
on F, a proposed region feature is generated.
Eq. 10 describes how we use the proposed region to
define our proposed feature map.
F
prop
n
= F ⊙ M
n
(10)
where ⊙ denotes the element-wise product. This
proposed feature F
prop
n
can be used to train the model
by combining it with the global feature of the image,
allowing the model to focus on both local and global
features.
2.3 Feature Maps
The proposed model will address three branches of
the extraction and fusion of attributes: a base feature
map, a global feature map, and a local feature map.
The base map will describe the most superficial at-
tributes found in the initial layers of the network, ob-
tained through convolutions at different levels. In this
stage, our model aims to capture patterns that may be
associated with edges, textures, and colors (low di-
mensionality). Eq. 11 shows what this branch repre-
sents.
f
base
= σ(W ∗ X + b) (11)
where
W is the convolution kernel, ∗ represents the con-
volution operation, X is the input (image or previous
features), b is the bias, and σ is an activation function
(such as ReLU).
Concerning the global attributes, these are ob-
tained by aggregating all the spatial information of the
image into a single representative vector using Global
Average Pooling (GAP), just as shown in Eq. 12.
f
global
=
1
H ×W
H
∑
i=1
W
∑
j=1
f
i j
(12)
where f
i j
is the feature vector at the spatial posi-
tion (i, j), and H ×W is the size of the spatial feature.
In our small dataset context, f
global
will contain
representations that help prevent overfitting by not re-
lying on specific details and providing a robust repre-
sentation that tolerates minor variations in the image.
f
proposal
will represent the local attributes ex-
tracted from the regions or stripes. In our case,
M
regions
will be the proposed stripes using the meth-
ods mentioned above, which will be used as delim-
iters to extract more localized attributes, f
proposal
in
Eq. 13.
f
proposal
=
M
∑
M=1
α
M
· f
(Input,M)
(13)
where α
M
are the selection weights, and f
Input,M
are the features in M region . f
proposal
generates repre-
sentative regions obtained through the outputs of the
DRPRC or QMCPR modules.
Subsequently, the reduced features are obtained
through a reduction of dimensionality for the feature
map of the proposed regions, performing an aggrega-
tion along with the activation, see Eq. 14.
f
reduce
= σ
1
F
F
∑
f =1
proposal
b, f
!
(14)
In this case, we calculate the mean of the values
across the feature dimension for each batch b.
2.4 Set up
Regarding our loss metric, we considered a fusion of
losses in triplet loss, starting with a cross-entropy loss
related to the class, followed by a loss for base at-
tributes, another for the proposed region, and another
for global attributes. Figure 1 shows the meaning of
each of these losses.
The total loss function (L
total
) is given by the Eq.
15 where λ
triplet
is defined in 16.
L
total
=λ
id
· L
CE
(cls
i
, y)
+ λ
triplet
· L
triplet
(global
i
, y)
+ pr
1
· L
triplet
(prop
i
, y)
+ pr
2
· L
triplet
(base
i
, y)
(15)
L
triplet
= max(0, dist
ap
− dist
an
+ margin) (16)
Where:
λ
id
is the weight assigned to the identification loss.
λ
triplet
is the weight assigned to the triplet loss. pr
1
is
the weight assigned to the proposal loss. pr
2
is the
Urban Re-Identification: Fusing Local and Global Features with Residual Masked Maps for Enhanced Vehicle Monitoring in Small Datasets
577
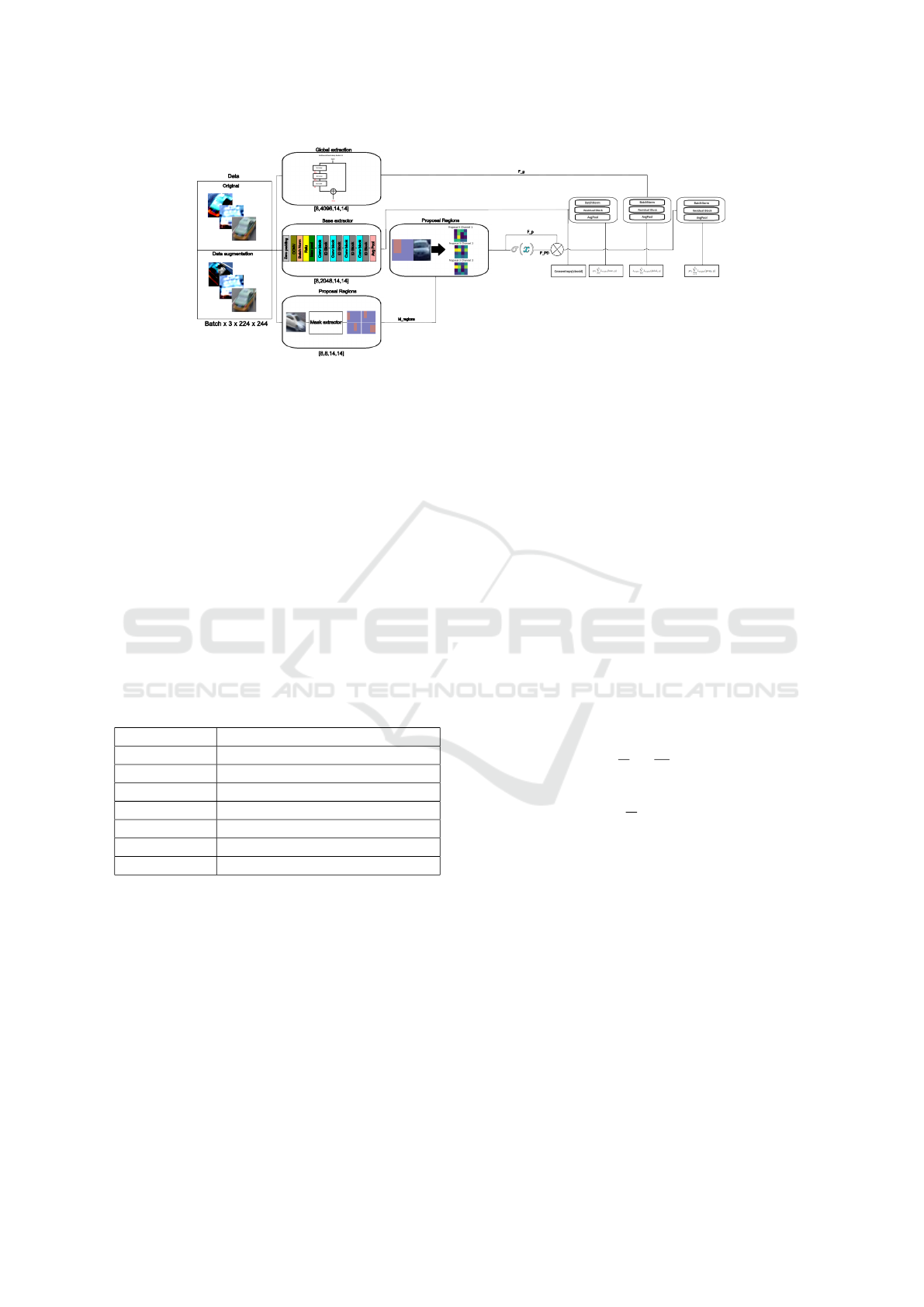
Figure 1: Reid training Pipeline.
weight assigned to the base loss. L
CE
is the cross-
entropy loss function, which measures the discrep-
ancy between the class prediction and the target label.
L
triplet
is the triplet loss function, which measures the
relative distance between an anchor, a positive, and
a negative in the feature space. N is the number of
layers or extracted features to which the loss is ap-
plied. cls
i
refers to the classification outputs of each
layer. global
i
refers to the global features extracted
from each layer. prop
i
refers to the proposed features
extracted from each layer. base
i
refers to the base fea-
tures extracted from each layer. y is the target label
for classification. dist
ap
defines Anchor-Positive Dis-
tance and dist
an
defines Anchor-Negative Distance.
About our approach, we used the training config-
urations described in Table 1.
Table 1: Training Configuration.
Configuration Value
Input Size 3x224x224
Epochs 200
Early Stop CMC rank 1 tolerance (10 epochs)
Augmentation Flip, Rotation, Scaling, Grayscale
Learning Rate 0.001
Optimizer Adam
Reduce LR On Plateau
3 EXPERIMENTS AND RESULTS
3.1 Datasets and Metrics
We use the VRIC dataset (Kanaci et al., 2018) in
both small and large variants. The small version has
5,854 training samples (220 IDs, 10-30 samples/ID)
and 2,811 gallery samples (validation), maintaining
the original test set for consistent comparative anal-
ysis. The large version retains all 60,430 samples
(5,622 IDs). Additionally, we use the VeRi dataset
(Liu et al., 2016) to evaluate the model’s adaptabil-
ity to domain shifts. Our validation protocol consid-
ered cross-dataset evaluation of metrics to assess per-
formance in two different scenarios: one with richer
contextual information and the other with higher res-
olution.
The small dataset is designed to evaluate model
performance with fewer, more variable inputs, test-
ing generalization on unseen validation IDs. Data
augmentation includes flips, grayscale conversions,
area-specific and full rotations, and GAN-based view
changes.
Performance is measured using mean Average
Precision (mAP) and Cumulative Matching Char-
acteristic (CMC) metrics, commonly used in re-
identification tasks. mAP assesses retrieval effective-
ness (Eq. 17), while CMC evaluates ranking accuracy
(Eq. 18) for top k = 1, 5, 10.
mAP =
1
N
N
∑
i=1
1
m
i
m
i
∑
k=1
P(k) (17)
CMC(r) =
1
N
N
∑
i=1
δ(rank
i
≤ r) (18)
3.2 Analysis of Attribute Extraction
Method
The present work evaluated two methods for region
generation. The first, DRPC, is based on generating
dilated regions using contours from the first layer of
the ResNet50 backbone, which involves a computa-
tional cost of O(batch) × processing1 + O(regions).
In the first stage, we iterate over the entire batch and
return the first layer in the forward pass, performing a
pass through the model and returning the first convo-
lution with binarization. The second stage encloses
each binarized area based on a dilation. The sec-
ond method, QMCPR, has a sublinear computational
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
578
cost and generates masks with an approximate com-
putational cost of O(batch × regions), approximately
O(8n), where ”regions” is a parameter fixed at 8, and
”batch” is a variable input parameter. Both methods
did not drastically modify the computational cost dur-
ing training execution.
On the other hand, these two algorithms provide
a base approach using masks that can be generalized
to any ReID dataset, reducing the need for manual
annotations or training models for part segmentation.
The previously mentioned methods will enable the lo-
cal extraction of features. Since these do not rely on
pre-annotated masks, they will evaluate more repre-
sentative regions using the ResNet backbone’s upper
layers or by selecting regions based on distributions
within a unit field representing the area of interest.
Subsequently, using extraction blocks, the features
within these regions will be extracted and reduced
to more relevant values using activations suggested
in this work. The proposed use of regions enhances
feature diversity by leveraging incomplete partition-
ing, which fuses and refines attributes from local,
global, and base extractions. This approach enables
the model to learn more discriminative contextual and
instance-specific information in small datasets, mak-
ing it a more robust solution.
Table 2 provides an initial notion of what these
methods imply in small datasets. Here, we compare
the model with mask guidance, the GRFR, and the
DRPC model against the baseline PGAN model with-
out attention. We observe that the proposed methods
are quite close to the training done entirely with the
masks generated for the VRIC dataset, provided in
(Zhang et al., 2020), showing a correlation with the
extraction of local attributes, which is a positive in-
dicator that our method successfully proposes highly
discriminative regions.
Table 2: Results of Different Models on Small-dataset Re-
Identification Tasks.
Model mAP CMC Top 1 CMC Top 5
PGAN 45.8 33.7 60.1
model mask guided 53.9 43.2 66.2
model GRFR (ours) 53.5 43.1 67.3
model DRPC (ours) 56.0 44.5 68.3
model DRPC+AUG view (ours ) 63.3 53.3 74.9
In the experimental stage, we observed that pay-
ing attention to small datasets tends to degrade the
gradient, resulting in less model generalization. Com-
paring PGAN with and without attention (PGAN vs.
model mask guided), we see that in small datasets,
more globalized learning tends to bring better perfor-
mance in terms of the CMC Top K=5 metric (approx-
imately 6% improvement). In small datasets, the lim-
ited diversity and number of examples lead the atten-
tion mechanism to overfit specific, less generalizable
local features rather than capturing broader patterns.
This overfitting causes the model to become sensitive
to noise or small variations in the training data, which
in turn degrades the gradient during optimization and
hinders the model’s ability to generalize effectively
to unseen samples. Regarding other masking meth-
ods, our trend was quite in line with PGAN without
attention, in some cases having a better CMC K=5
(approximately 1.1% improvement).
3.3 Performance of Our Model
Our model is designed to handle small datasets with-
out region annotations, using a model masking ap-
proach based on the forward pass of the same model.
As depicted in Figure 1, we emphasize more repre-
sentative areas of the feature maps through a reduc-
tion facilitated by an activation function. This ap-
proach reduced training time by several seconds due
to its lower complexity, eliminating the need for at-
tention mechanisms and specialized refinement mod-
ules. Specifically, the training times were 66 seconds
per batch (size of 8 samples) for the base model, com-
pared to 62 seconds with the DRPC method and 60
seconds with the QMCPR method. These tests were
performed using an NVIDIA GeForce RTX 3060, a
13th Gen Intel® Core™ i5-13600KF (20 cores), and
32GB of RAM.
Table 3: Experimental results of Different Models on Large
Dataset Re-Identification Tasks, V RIC− > V RIC.
Model mAP CMC Top 1 CMC Top 5
PGAN 84.5 77.4 93.1
model DRPC (ours) 82.0 74.9 89.8
As shown in Table 3, our model lags behind
attention-based models on large datasets. This is be-
cause attention-based models typically involve deeper
feature extraction layers. In contrast, models based on
Squeeze-and-Excitation layers and attention mecha-
nisms achieved up to a 3.3% improvement.
However, as illustrated in Table 4, our model
demonstrated balanced performance across various
scenarios due to our generalized approach in extract-
ing local discriminative features and global attributes.
Our model had fewer parameters, reducing inference
times: 0.0302 seconds for the base model, 0.0095 sec-
onds for QMPRC, and 0.0216 seconds for DPRC.
Table 4 details the performance of our model in
mixed scenarios. The first scenario involves train-
ing and evaluating the VeRi model on the VeRi test
set. This setup shows that VeRi, a higher-quality
dataset, allows more straightforward methods that im-
prove variability by expanding the visual context to
Urban Re-Identification: Fusing Local and Global Features with Residual Masked Maps for Enhanced Vehicle Monitoring in Small Datasets
579

Figure 2: Qualitative inference of our model, VRIC to VeRi vs. VRIC to VRIC vs. large VRIC to VeRi.
Table 4: Experimental results of Different Models on Large
dataset Re-Identification Tasks, V RIC− > VeRi vs VeRi− >
V RIC.
Model CMC Top 1 CMC Top 5 CMC Top 10 Train Test
PGAN 95.2 97.5 98.7 VeRi VeRi
PGAN 14.3 26.1 33.0 VeRi VRIC
PGAN 44.9 56.9 66.2 VRIC large VeRi
PGAN 37.5 43.2 50.8 VRIC small VeRi
DRPC (ours) 94.8 97.2 98.4 VeRi VeRi
DRPC (ours) 39.6 53.3 60.9 VRIC small VeRi
DRPC (ours) 56.8 62.1 68.0 VRIC large VeRi
DRPC (ours) 21.8 38.2 46.4 VeRi VRIC
perform well in similar contexts. As observed, PGAN
and the proposed method are nearly identical regard-
ing the CMC curve for VeRi vs. VeRi, with only a 0.5
percentage point difference at K=5.
Regarding susceptibility to input variability, our
model’s ability to learn contextual regions allowed it
to achieve superior performance in the Cumulative
Matching Characteristic (CMC) metric with K = 5
when transitioning from the VeRi dataset to the VRIC
dataset (VeRi vs VRIC). Specifically, the model im-
proved up to 12.1 percentage points, indicating en-
hanced generalization capabilities. In contrast, the
model trained with a smaller dataset and data aug-
mentation fell 5.3 percentage points short compared
to the baseline model trained on the full dataset.
3.4 Discussion of Results
Our model focused on improving generalization and
performance on small datasets. This led to evaluating
the performance of our model in terms of changes in
the number of samples and context variations. Figure
2 shows how the matching works for the k=5 smallest
distances concerning our query, evaluated on a gallery
or query set.
Figure 2 shows some critical and common cases
regarding re-identification for VRIC and VeRi. Re-
garding the VRIC dataset, we found quite a few
matches for the top 5, considering the dimensionality
of the samples used in the training, which is quite pos-
itive. The shift in context to VeRi demonstrated that
part of the knowledge extracted from VRIC helped to
re-identify a wide variety of instances in this dataset.
The scores in the context shift was deficient compared
to the base model trained with attention and the entire
VRIC set due to the inherent limitations of our small
dataset’s dimensionality. Regarding our model’s ef-
fectiveness in generalizing learning in a large dataset,
we also observed that our model not only reduced
the necessary training time but also generalized the
learning optimally, achieving a balance between per-
formance and susceptibility to variability.
4 COPYRIGHT FORM
This work is licensed under the Creative Com-
mons Attribution-NonCommercial-NoDerivatives 4.0
International License. To view a copy of this
license, visit http://creativecommons.org/licenses/
by-nc-nd/4.0/. This license permits non-commercial
use, distribution, and reproduction in any medium,
provided the original work is properly cited and is not
modified or adapted in any way.
5 CONCLUSIONS
Our approach demonstrated how to tackle a mask-
based method by creating regions through the same
activations proposed by the backbone, generating
partitions with greater context, and establishing a
baseline for scenarios with high-resolution instances
where emphasis is placed on the fusion of global and
local attributes. Along the same lines, we empha-
sized creating more discriminative feature maps by
reducing feature maps of proposed regions, leading to
more representative representations per proposed re-
gion. This made our approach more robust in domain
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
580

shift and small datasets. Providing greater context and
more localized information resulted in our model out-
performing our baseline by 8% in the small dataset
case, comparing our baseline PGAN result with our
DPRC-based model in the context of VRIC small. In
domain shift, our model (DPRC) exceeded our base-
line (PGAN) by up to 11% in CMC k=1, showing pos-
itive effects of proposing context-rich region parts in
using VRIC to train and VeRI for inference. Addi-
tionally, our approach aimed to verify the limitations
involved in small sample volumes and observed how
implementing classical techniques oriented towards
morphological transformations and using GANs for
simple changes like color and texture can help address
issues where our study instance is highly costly to an-
notate.
ACKNOWLEDGEMENTS
This study was financed in part by the Coordination of
Superior Level Staff Improvement - Brasil (CAPES)
- Finance Code 001.
REFERENCES
Chen, H., Zhao, Y., and Wang, S. (2023). Person re-
identification based on contour information embed-
ding. Sensors, 23(2):774.
Chen, X., Xu, H., Li, Y., and Bian, M. (2021). Person re-
identification by low-dimensional features and metric
learning. Future Internet, 13(11):289.
Fan, X., Luo, H., Zhang, X., He, L., Zhang, C., and
Jiang, W. (2019). Scpnet: Spatial-channel paral-
lelism network for joint holistic and partial person re-
identification. In Computer Vision–ACCV 2018: 14th
Asian Conference on Computer Vision, Perth, Aus-
tralia, December 2–6, 2018, Revised Selected Papers,
Part II 14, pages 19–34. Springer.
Fawad, Khan, M. J., and Rahman, M. (2020). Person re-
identification by discriminative local features of over-
lapping stripes. Symmetry, 12(4):647.
Gong, Y., Zeng, Z., Chen, L., Luo, Y., Weng, B., and Ye, F.
(2021). A person re-identification data augmentation
method with adversarial defense effect. arXiv preprint
arXiv:2101.08783.
He, X., Luo, Z., Li, Q., Chen, H., and Li, F. (2023). Dg-
gan: A high quality defect image generation method
for defect detection. Sensors, 23(13):5922.
Jiang, Y., Chen, W., Sun, X., Shi, X., Wang, F., and Li, H.
(2021). Exploring the quality of gan generated images
for person re-identification. In Proceedings of the 29th
ACM International Conference on Multimedia, pages
4146–4155.
Kalayeh, M. M., Basaran, E., G
¨
okmen, M., Kamasak,
M. E., and Shah, M. (2018). Human semantic pars-
ing for person re-identification. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 1062–1071.
Kanaci, A., Zhu, X., and Gong, S. (2018). Vehicle re-
identification in context. In Pattern Recognition - 40th
German Conference, GCPR 2018, Stuttgart, Ger-
many, September 10-12, 2018, Proceedings.
Karras, T., Aittala, M., Laine, S., H
¨
ark
¨
onen, E., Hellsten, J.,
Lehtinen, J., and Aila, T. (2021). Alias-free generative
adversarial networks. Advances in neural information
processing systems, 34:852–863.
Karras, T., Laine, S., Aittala, M., Hellsten, J., Lehtinen, J.,
and Aila, T. (2020). Analyzing and improving the im-
age quality of StyleGAN. In Proc. CVPR.
Liu, X., Liu, W., Mei, T., and Ma, H. (2016). A deep
learning-based approach to progressive vehicle re-
identification for urban surveillance. In Computer
Vision–ECCV 2016: 14th European Conference, Am-
sterdam, The Netherlands, October 11-14, 2016, Pro-
ceedings, Part II 14, pages 869–884. Springer.
Luo, H., Jiang, W., Gu, Y., Liu, F., Liao, X., Lai, S., and
Gu, J. (2019a). A strong baseline and batch normal-
ization neck for deep person re-identification. IEEE
Transactions on Multimedia, 22(10):2597–2609.
Luo, H., Jiang, W., Zhang, X., Fan, X., Qian, J., and Zhang,
C. (2019b). Alignedreid++: Dynamically matching
local information for person re-identification. Pattern
Recognition, 94:53–61.
Lv, G., Ding, Y., Chen, X., and Zheng, Y. (2024).
Mp2pmatch: A mask-guided part-to-part matching
network based on transformer for occluded person re-
identification. Journal of Visual Communication and
Image Representation, 100:104128.
Si, J., Zhang, H., Li, C.-G., Kuen, J., Kong, X., Kot, A. C.,
and Wang, G. (2018). Dual attention matching net-
work for context-aware feature sequence based per-
son re-identification. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 5363–5372.
Song, C., Huang, Y., Ouyang, W., and Wang, L. (2018).
Mask-guided contrastive attention model for person
re-identification. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 1179–1188.
Wang, G., Yuan, Y., Chen, X., Li, J., and Zhou, X. (2018).
Learning discriminative features with multiple granu-
larities for person re-identification. In Proceedings of
the 26th ACM international conference on Multime-
dia, pages 274–282.
Zhang, X., Zhang, R., Cao, J., Gong, D., You, M., and Shen,
C. (2020). Part-guided attention learning for vehicle
instance retrieval. IEEE Transactions on Intelligent
Transportation Systems, 23(4):3048–3060.
Zheng, Z., Yang, X., Yu, Z., Zheng, L., Yang, Y., and Kautz,
J. (2019). Joint discriminative and generative learn-
ing for person re-identification. In proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 2138–2147.
Urban Re-Identification: Fusing Local and Global Features with Residual Masked Maps for Enhanced Vehicle Monitoring in Small Datasets
581
