
A Proposed Immersive Digital Twin Architecture for Automated Guided
Vehicles Integrating Virtual Reality and Gesture Control
Mokhtar Ba Wahal
1
, Maram Selsabila Mahmoudi
1
, Ahmed Bahssain
1
, Ikrame Rekabi
1
,
Abdelhalim Saeed
1
, Mohamad Alzarif
1
, Mohamed Ellethy
2
, Neven Elsayed
3
, Mohamed Abdelsalam
2
and Tamer ElBatt
1,4
1
Department of Computer Science and Engineering, The American University in Cairo, Cairo, Egypt
2
Siemens EDA, Cairo, Egypt
3
Know-Center, Graz, Austria
4
Department of Electronics and Communications Engineering, Faculty of Engineering, Cairo University, Giza, Egypt
{mokhtarsalem, marammahmoudi, ahmed.bahusain, ikrame.rekabi, abdelhalim saeed, mohamadalzarif,
tamer.elbatt}@aucegypt.edu, {mohamed.abd el salam ahmed, mohamed.ellethy}@siemens.com, nelsayed@know-center.at
Keywords:
Human-Robot Interaction, Virtual Reality, Modeling, Digital Twin, Immersive Systems, Cyber-Physical
Systems.
Abstract:
Digital Twins (DTs) are virtual replicas of physical assets, facilitating a better understanding of complex
Cyber-Physical Systems (CPSs) through bidirectional communication. As CPS grows in complexity, the need
for enhanced visualization and interaction becomes essential. This paper presents a framework for integrating
virtual reality (VR) with a Dockerized private cloud to minimize communication latency between digital and
physical assets, improving real-time communication. The integration, based on the Robot Operating System
(ROS), leverages its modularity and extensive libraries to streamline robotic control and system scalability.
Key innovations include a proximity heat map surrounding the digital asset for enhanced situational awareness
and VR-based hand gesture control for intuitive interaction. The framework was tested using TurtleBot3 and
a 5-degree-of-freedom robotic arm, with user studies comparing these techniques to traditional web-based
control methods. Our results demonstrate the efficacy of the proposed VR and private cloud integration,
providing a promising approach to advance Human-Robot Interaction (HRI).
1 INTRODUCTION AND
RELATED WORK
Designing a digital representation of a physical as-
set has always been considered a method to study,
analyze, and control physical assets effectively. Dr.
Michael Grieves first introduced the concept of Dig-
ital Twins (DTs) in 2002 as real-time duplicates of
physical assets with seamless data exchange for sev-
eral purposes, including monitoring, comprehension,
and optimization (Alexandru et al., 2022). However,
the concept of Digital Twins gained more attention in
2010 when NASA saw its potential uses. The inter-
est of NASA in the concept of Digital Twins helped
shift the focus to advancing the technology, even if it
did not successfully implement the concept of Digital
Twins at the time (Saddik, 2018). DTs are considered
important strategic technologies because of their ef-
fectiveness in time, cost reduction, and precise simu-
lation of operational settings by using the digital asset
as a virtual representation for designing, testing, and
operations (Attaran and Celik, 2023) (Crespi et al.,
2023).
The implemented applications of Digital Twins
are mostly focused on manufacturing compared to the
number of Digital Twins in critical mission applica-
tions such as robotics operating in rescue missions
(Pirker et al., 2022). The success of critical missions
operated by robotics is dependent on the situational
awareness of the robot and the environment (Riley
and Endsley, 2004). Most of the rescue Digital Twins
found in the literature do not include an Autonomous
Guided Vehicle (AGV), a mobile robot designed for
autonomous navigation, limiting their effectiveness in
dynamic environments. The traditional methods for
actuating robotic arms using web-based dashboards
or keyboard buttons have proven to be limited in terms
of flexibility and ease of use, particularly for users un-
Wahal, M. B., Mahmoudi, M. S., Bahssain, A., Rekabi, I., Saeed, A., Alzarif, M., Ellethy, M., Elsayed, N., Abdelsalam, M. and ElBatt, T.
A Proposed Immersive Digital Twin Architecture for Automated Guided Vehicles Integrating Virtual Reality and Gesture Control.
DOI: 10.5220/0013176900003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 267-275
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
267

familiar with robotic systems (Abdulla et al., 2020).
In recent years, there has been increasing inter-
est in the potential of Human-Robot Interaction (HRI)
techniques for enhancing Digital Twins applications,
driven by the need for more intuitive and effective
methods to improve the situational awareness of op-
erators (Gallala et al., 2022). One effective tech-
nology for enhancing HRI is Virtual Reality (VR),
which enables users to engage and interact within a
synthesized three-dimensional environment (Gigante,
1993). VR directly enhances HRI by offering a more
immersive user experience, interactive simulations,
and intuitive actuation methods. All these features to-
gether result in a more effective and efficient environ-
ment for monitoring and controlling DT-aided teler-
obotics, specifically AGV with an integrated robotic
arm. In their survey, (Mazumder et al., 2023) high-
lighted the effectiveness of VR data processing for
enhancing robot control and assisting human opera-
tors. They discussed the development of a telerobotic
workspace with Digital Twin integration for gesture-
based robot control. Additionally, they noted that
VR/MR (Mixed Reality) interfaces significantly im-
proved DT-aided telerobotics by providing more im-
mersive controls, particularly useful for operations in
hazardous environments. Both assets must be syn-
chronized to ensure the correct bi-directional data
flow. Ellethy et al. (Ellethy et al., 2023) proposed
a novel architecture that utilizes a Dockerized pri-
vate cloud to minimize the latency between the two
edges of the system. A Dockerized private cloud is
a set of Docker containers hosting services such as
storage, AI, and real-time monitoring (Ellethy et al.,
2023). A comparative analysis of public vs. private
cloud-based systems using latency and computation
as metrics showed the comparative advantage of us-
ing a Dockerized private cloud to host the services
provided by the Digital Twin.
In this work, we propose a novel architecture that
increases the HRI and immersive experience of Digi-
tal Twins practitioners through the integration of VR
with a Dockerized private cloud ensuring minimized
latency that allows the user to handle critical missions.
We used an open-source Software Development Kit
(SDK) to construct the Digital Twin, in addition to
extending it to integrate the virtual reality part of the
system.
This paper consists of the following sections. Sec-
tion 2 provides an overview of the system by high-
lighting the tools and components used to implement
the project. Afterward, a detailed description of the
system architecture is presented in Section 3, with
technical details about integrating a Dockerized Pri-
vate Cloud and Virtual Reality. In Section 4, methods
to improve HRI using VR technology are introduced,
including a Heat Map to enhance situational aware-
ness of the user and gesture-based actuation meth-
ods for more immersive control of the AGV and the
robotic arm. In addition, this section discusses a user
study that evaluates the proposed actuation methods.
Finally, Section 5 presents conclusions about the sys-
tem and suggests potential directions for future re-
search.
Figure 1: A diagram showcasing the proposed Digital Twin
architecture, making use of a Dockerized private cloud.
2 SYSTEM OUTLINE
This section gives a background about the tools used
in the project, as familiarity with the following con-
cepts and tools is essential to the full understanding
of the details of the project.
The TurtleBot3 is a small, programmable mobile
robot that has two models: “Waffle” and “Burger.” We
opted for the waffle model in our setup for its com-
patibility with the arm manipulator and its suitability
for research and educational purposes. In general, the
TurtleBot3 was selected for its open-source architec-
ture, modularity, and extensive community support,
making it ideal for developing complex robotic appli-
cations (Amsters and Slaets, 2020).
The TurtleBot3 is equipped with a Light Detec-
tion and Ranging (LIDAR) sensor, mounted on top
of the robot, that can accurately measure the dis-
tance to the surrounding objects by emitting laser
pulses and analyzing their reflections. It can navi-
gate autonomously using Simultaneous Localization
and Mapping (SLAM), a mapping method that allows
robots and other autonomous vehicles to build a map
and localize themselves within it simultaneously. A
G-mapping package that provides laser-based SLAM
as a ROS node called slam gmapping was used to
map our environment.
In addition to the LIDAR, other key components
of the TurtleBot3 include the Raspberry Pi (RPi) and
the OpenCR board. The Raspberry Pi, placed one
level below the LIDAR, serves as the main computer,
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
268

providing processing power to run the robot’s soft-
ware, manage communication, and handle data from
sensors. While the OpenCR board, placed below the
RPi, is the robot’s microcontroller, it interfaces with
the hardware components like motors and sensors and
executes low-level control tasks for precise and real-
time operation. Finally, on the lowest level, we find
the battery and two Dynamixel XL430 W250 servo
motors to help stabilize the robot’s speed and position
(Amsters and Slaets, 2020).
Beyond the TurtleBot3, we integrated a five-
degrees-of-freedom robotic arm, which is digitally
represented by the OpenMANIPULATOR-X simula-
tion, providing a comprehensive Digital Twin for test-
ing and control.
The TurtleBot3 operates on a Linux-based op-
erating system, specifically Ubuntu 20.04, installed
on the RPi SD card. To program and control the
TurtleBot3 and its robotic arm, we utilized ROS, a
flexible and powerful framework for robotics soft-
ware development. ROS provides features that sup-
port a microservices architecture, emphasizing decen-
tralization, fault tolerance, and decoupling of system
components through the use of ROS nodes and top-
ics. These nodes can run across multiple devices and
connect via various mechanisms, such as requestable
services or publisher/subscriber communication. We
selected ROS as the primary framework due to its
widespread adoption in the robotics community, ex-
tensive library support, and facilitation of modular
development, which accelerates implementation and
fosters collaboration (Estefo et al., 2019).
The Dockerized private cloud architecture is a lay-
ered architecture originally proposed by Ellethy et
al.(Ellethy et al., 2023). The architecture offers sig-
nificant advantages regarding latency reduction, scal-
ability, and maintenance. It is composed of three main
layers:
The Hardware-Specific Layer. It includes both dig-
ital and physical assets. Each asset is managed by a
ROS Master and an identical ROS subsystems. The
separation of ROS Masters is to avoid single points of
failure and prevent bottlenecks. At the same time, the
identical subsystems ensure modularity and seamless
replication. Individual ROS nodes handle different
functionalities, such as collecting sensory data, pro-
cessing actuation commands, and video streaming.
The Middleware Layer. It facilitates the commu-
nication between the first and third layers. It mar-
shals data between the two layers, ensuring that each
ROS node from Layer 1 has a corresponding middle-
ware node for data translation. Communication be-
tween the hardware-specific layer and the Dockerized
private cloud layer is achieved through web sockets,
making this layer hardware-agnostic and scalable.
Dockerized Private Cloud Layer. As illustrated in
the grey box of Figure 1. This layer provides a
set of Docker containers that offer services such as
AI-based processing, real-time monitoring, and data
storage. By leveraging Docker Compose, multiple
containers are orchestrated to run services such as
database management and server operations. This
setup ensures that the digital twin is always avail-
able with minimal latency and improved security as
compared to architectures relying on public or remote
clouds.
As shown in Figure 1, each of the subsystems
–Digital Twin, Physical Twin, and Virtual Reality–
comes with its designated SDK. These SDKs stream-
line the process of reproducing the system or creating
other Digital Twins for customized use. Instead of
building everything from scratch, users can rely on the
SDKs to generate the essential scripts for all subsys-
tems. They can then edit and customize these scripts
as needed to suit their specific requirements.
The hand gesture control interface was imple-
mented using an Oculus Quest 2 and its enabling
SDKs. Oculus Quest 2 provides an affordable entry
point into Virtual Reality and offers users an immer-
sive VR experience. To enable the user to control
both the AGV and the robotic arm in a fully immer-
sive environment, we utilized the XR Controller pack-
age in Unity. This package integrates the Input Sys-
tem and translates tracked input from controllers into
XR interaction states. Specifically, we used Unity’s
OpenXR XRSDK framework, which allows for ro-
bust interaction with VR hardware.
3 VIRTUAL REALITY
INTEGRATION WITH A
DOCKERIZED PRIVATE
CLOUD
The system presents a comprehensive framework for
integrating Virtual Reality with a Dockerized private
cloud infrastructure to benefit from the minimized
communication latency between both the physical and
digital assets and the VR headset. Our work builds
upon the findings of a previous work in which Ellethy
et al. (Ellethy et al., 2023) highlighted the benefits
of using a private cloud over a public one. A com-
parative study was conducted to evaluate the latency
and accuracy of a Digital Twin using different cloud
systems. The results showed that a local cloud was
5.5 times faster than a public cloud when transmitting
an average data size of 128 bytes. In a local network
A Proposed Immersive Digital Twin Architecture for Automated Guided Vehicles Integrating Virtual Reality and Gesture Control
269

environment, such as a Wireless Local Area Network
(WLAN), data does not need to travel long distances
or pass through multiple servers, as it does in public
cloud infrastructures like AWS. This significantly re-
duces network latency between physical and digital
assets, resulting in faster response time and more ac-
curate real-time control, which are critical for AGV
operations and enhancing the immersion of VR envi-
ronments through a synchronized DT.
The integration of VR with a Dockerized private
cloud plays a significant role in enhancing user inter-
action with the digital asset. VR provides immersive
interaction for the user by simulating its presence in
this digital environment, which is an ideal tool for in-
terfacing with DTs. The choice of Unity as the holder
of the digital asset instead of Gazebo was driven by
several factors. Primarily, Gazebo plugins for deploy-
ing the system to VR headsets have not been updated
to keep pace with the rapid development the industry
has seen in recent years. Additionally, Unity provides
greater flexibility for creating custom environments
and integrating advanced graphic features. Most no-
tably, Unity excels in supporting innovative interac-
tive input interfaces, such as hand gestures. In gen-
eral, the ROS-Unity3D architecture for the simulation
of mobile ground robots proved to be a viable alterna-
tive for ROS-Gazebo and the best option to integrate
VR into the system (Platt and Ricks, 2022). Due to
the mentioned reasons, the common practice among
robotics developers and researchers is to divide the
system into two subsystems: Ubuntu for interaction
with the physical asset and Windows for the VR de-
velopment in Unity.
The system’s latest update involves creating a
Unity scene to host the digital simulation.
Map: The environment was first constructed on
an Ubuntu machine using the slam gmapping node.
The mesh files were then transferred to the Unity
project on a Windows machine, where surfaces and
colliders were added to the walls to enhance realism.
URDF Importer: The Unified Robotics Descrip-
tion Format (URDF) Importer is a Unity robotics
package that enables the import of robot assets de-
fined in the URDF format into Unity scenes. The
imported asset retains its geometry, visual meshes,
kinematic, and dynamic attributes. The Importer
leverages PhysX 4.0 articulation bodies to parse the
URDF file. Using the URDF Importer, the Turtle-
Bot3 OpenMANIPULATOR-X was imported, and
additional objects were added to replace some of the
default actuation scripts, as advised by the package
development team. Customized scripts were imple-
mented to better represent the AGV and its robotic
arm within Unity.
3.1 Robotic Arm Integration
The TurtleBot3 was augmented with a five-degree-
of-freedom robotic arm. The arm is powered by the
TurtleBot3 OpenCR board while its servo motors are
connected to a servo motor controller board for eas-
ier setup. The latter board is connected to the RPi and
communicates with it using the I2C protocol, a simple
serial protocol used for communication between two
devices or chips in an embedded system, to receive
commands and control the arm.
To digitally represent the robotic arm, we uti-
lized the OpenMANIPULATOR-X model, which is
mounted on the TurtleBot3 and imported into Unity.
The arm follows the same three-layer architecture as
the TurtleBot3, with two separate ROS Masters: one
for the Physical Twin and the other for the Digital
Twin. The hardware layer of the Digital Twin is re-
sponsible for collecting the sensory data from the arm,
specifically the joint state data. This data is orga-
nized and sent to the middleware layer, which propa-
gates it to the cloud layer via web sockets. Once the
data reaches the cloud, it is processed and sent back
through the same layers in reverse, eventually reach-
ing the hardware layer of the physical asset to actuate
the robotic arm.
The robotic arm utilized underwent meticulous as-
sembly via piece-by-piece integration, following the
manufacturer’s instructions. During the assembly se-
quence, linkages were established between the com-
ponents. Each connection necessitated proper execu-
tion to ensure the arm’s proper functioning. Given the
study’s specific demands, minor modifications were
implemented on the arm. Despite its six servo motors,
only five were ultimately employed in the experiment
to match the Digital Twin in the degrees of freedom.
Of the accessories initially included, only a select few
were deemed suitable for the task; the arm grabber re-
quired replacement. This modification resulted from
uncertainties regarding its precision in the execution
of object manipulation tasks. The robotic arm was
mounted on an additional surface placed on top of the
TurtleBot3 platform to integrate the robotic arm into
the experimental setup. This position was chosen to
prevent interference with the LIDAR sensor and, at
the same time, to keep the balance of the TurtleBot3.
The robotic arm consists of five servos, each of-
fering a range of 180 degrees. Each servo motor was
strategically placed to enable precise control over the
arm’s movements. Operating particularly, a merger of
such functions:
• Servo Motor 1 facilitates the rotation of the arm
from side to side, serving as the base of its move-
ment.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
270

• Servo Motor 2 controls the forward and backward
motion of the arm, allowing it to extend and re-
tract as needed.
• Servo Motor 3 is responsible for the vertical
movement of the upper half of the arm, enabling
it to adjust its height.
• Servo Motor 4 controls the opening and closing of
the gripper mechanism, enabling the arm to grasp
and release objects.
• Servo Motor 5 provides control over the gripper it-
self, allowing precise manipulation during object
handling tasks.
Overall, the robotic arm was integrated into the
experimental setup with careful consideration of its
design and functionality. By selecting appropriate
components and making necessary modifications, the
arm was tailored to meet specific needs while ensur-
ing reliable performance and accurate data collection.
3.2 Unity-ROS Messages and
Communications
Integrating VR with ROS necessitated incorporating
Unity into the project due to its robust support for
3D simulation and VR technologies (Allspaw et al.,
2023). Unity-ROS communication was established
using a ROS-TCP connector, which involved initiat-
ing a TCP endpoint on the ROS Master of the Digi-
tal Twin. Within Unity, publishers and subscribers for
various topics were implemented to facilitate commu-
nication with the ROS network. Through the server
endpoint, serialized ROS messages—such as distance
measurements from the distance-sensor topic, cam-
era feed frames, Twist messages, and joint-state mes-
sages—are exchanged between Unity and the ROS
Master of the Digital Twin.
As illustrated in Figure 2, the data flow between Unity
and ROS comprises multiple critical stages. Unity
serves as a simulation environment, generating mes-
sages that are published to topics created by the Dig-
ital ROS Master. These messages are subsequently
transmitted to the physical ROS Master via the Dock-
erized private cloud using web sockets. This setup
ensures reliable and low-latency communication be-
tween the digital simulation and the physical robot.
The figure illustrates how serialized ROS messages
are propagated from Unity to the physical asset, with
each message type—such as sensor readings or actua-
tion commands—managed through designated topics.
This architecture is essential for maintaining synchro-
nization between virtual and physical systems, ensur-
ing accurate and real-time operation of robotic assets.
Figure 2: Data flow between ROS and Unity.
4 METHODS TO IMPROVE
HUMAN-ROBOT
INTERACTION USING VR
4.1 Heat Map Implementation
To enhance the user’s situational awareness, we aug-
mented the AGV with several ultrasonic sensors to
implement a Heat Map. This map is integrated on
a quad with a shader and is applied only to the sur-
rounding environment of the TurtleBot3, improving
its ability to detect and react to nearby objects. Ultra-
sonic sensors are strategically positioned around the
TurtleBot3 to ensure full coverage, allowing for ob-
stacle detection from all directions. The Heat Map is
dynamically adjusted by the shader to the red color,
with the intensity of the color depending solely on the
distance from the TurtleBot3 to the surrounding ob-
ject. The distance is determined by the data received
from the ultrasonic sensor. The closer the object, the
more intense the red color is. A threshold is set to de-
termine the change of the color intensity. For exam-
ple, a distance between 1 and 20 cm indicates that the
object is very close, causing the red color to be very
intense. A distance between 20 and 30 cm makes it
less intense, and so on. If the distance is above 50 cm,
no Heat Map is shown, indicating that the TurtleBot3
is navigating in a safe environment.
In addition to providing a visual representation,
the ultrasonic sensors trigger real-time responses
from the AGV based on proximity to obstacles. If an
object is detected within the 1-20 cm range, the AGV
automatically adjusts its movement to avoid collisions
by slowing down or stopping. This reactive behavior
not only provides a visual representation of the pres-
ence and proximity of obstacles but also ensures that
the AGV can operate safely in a dynamic environment
by actively avoiding obstacles. Figure 3 shows an im-
age of how the Heat Map looks when an obstacle is
within the 1-20 cm range from an obstacle.
A Proposed Immersive Digital Twin Architecture for Automated Guided Vehicles Integrating Virtual Reality and Gesture Control
271
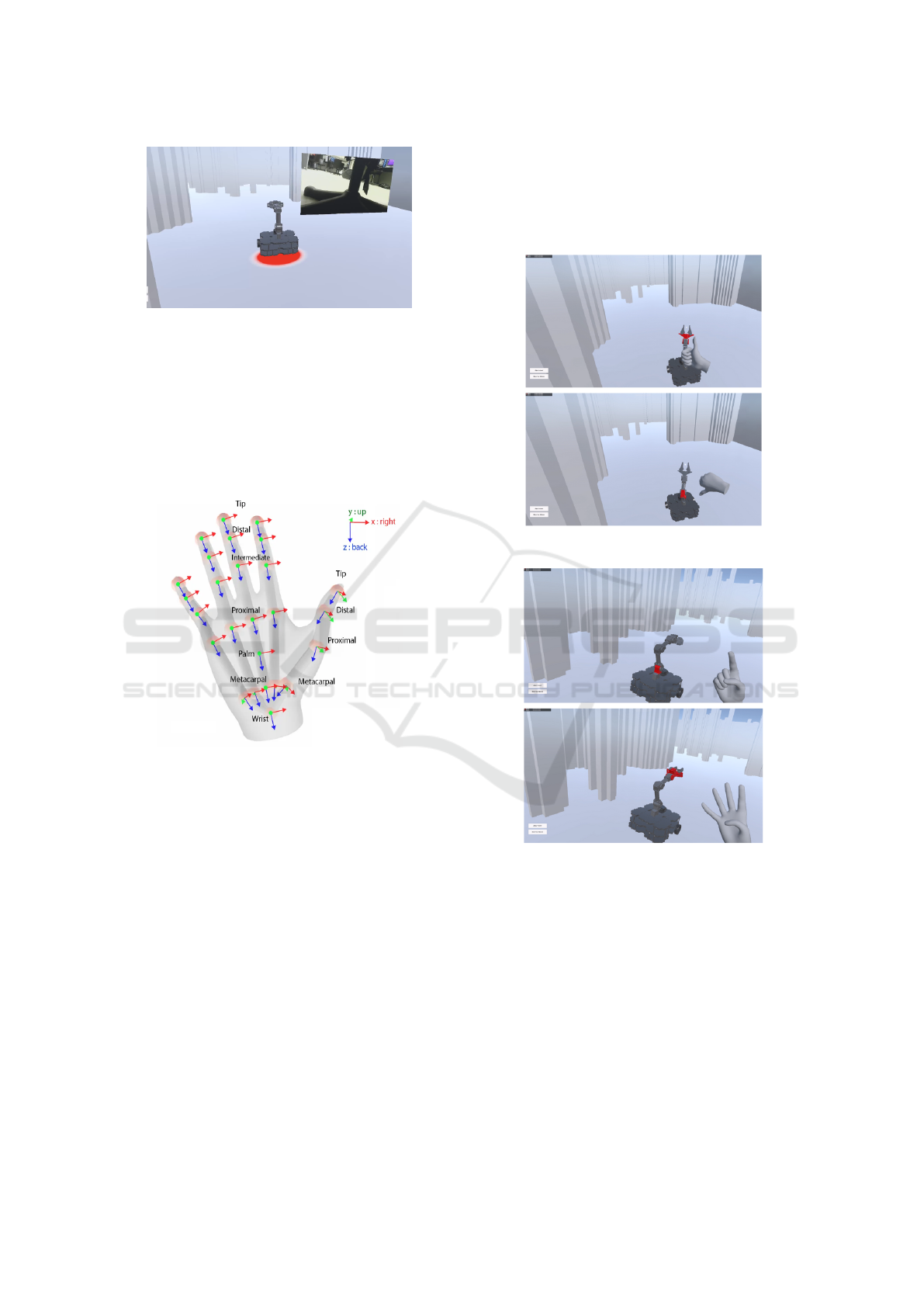
Figure 3: The heat map representation.
4.2 Arm Actuation Methods
To address the limitations of traditional robotic arm
actuation methods, we introduce three actuation
methods based on the user’s hand gestures and move-
ments. These methods aim to provide the user con-
trolling the AGV and the robotic arm with a more im-
mersive experience.
Figure 4: XR-Hand Joints.
Hand tracking and gesture recognition of the Ocu-
lus Quest 2 are implemented using the XR Hands
SDK in Unity, which tracks the user’s hand move-
ments. The headset’s cameras stream live video to
Unity, where the XR Hands package provides real-
time tracking of the (x,y,z) coordinates of several
joints of the hands including the wrist, the palm,
and individual finger joints as demonstrated in Fig-
ure 4. Moreover, the XR hands package provides ges-
ture recognition based on the hand’s shape and ori-
entation. Finally, the aforementioned collected data
about the user’s hand is used to design and imple-
ment three different VR-based methods to actuate the
robotic arm. After recognizing the user’s hand ges-
tures and movements, they are mapped to actuation
commands. These commands are propagated from
Unity to the digital ROS Master through a TCP end-
point as demonstrated in Figure 2. Once the messages
are received, the Dockerized private cloud is then re-
sponsible for managing the communication between
the digital and physical ROS Masters. It forwards the
ROS messages to the physical ROS Master, which is
responsible for actuating the physical assets based on
the received ROS messages.
Figure 5: Method 1 : Sequential Selection.
Figure 6: Method 2 : Numerical Selection.
The three actuation methods are:
Method 1, Sequential Selection: It utilizes hand ges-
ture recognition of the user’s hand to perform the se-
lection of the target joint out of the five joints in the
robotic arm, in addition to the actuation of the se-
lected joint shown in Figure 5, given that the joints
are numbered from 1 to 5. The user can switch be-
tween the five joints sequentially, using thumbs-up
and thumbs-down gestures to switch to the next upper
or lower joint, respectively. To actuate the arm based
on the selected joint, highlighted in red in Figure 5,
the opening or closing hand gesture can be detected
and used to increase or decrease the angle of the se-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
272

lected joint, respectively. This method utilizes two
separate and independent procedures for the selection
and actuation of the arm joints.
Method 2, Numerical Selection: Similar to method
1 in terms of the actuation of the selected joint. How-
ever, the selection is numerical. The user shows the
index of the target joint using their hand, and the re-
spective joint is selected and highlighted in red, as
demonstrated in Figure 6. This method also separates
the selection and actuation of the arm joints.
Figure 7: Method 3: Mixed Selection and Actuation.
Method 3, Intuitive Control: This method differs
from the first two by integrating the selection and
actuation of the joints together. In this approach,
the user’s hand movements are tracked, enabling the
robotic arm to replicate them as demonstrated in Fig-
ure 7 (e.g., if the user moves their hand upward, the
robotic arm moves upward). The hand’s position
along the x-axis controls the first joint (Servo Motor
1), allowing the arm to rotate, while movements along
the z-axis control the second joint (Servo Motor 2) for
forward and backward motion. Similarly, movements
along the y-axis adjust the third joint (Servo Motor
3) for upward and downward motion. The orientation
of the user’s hand dictates the position of the fourth
joint (Servo Motor 4); for example, when the hand
points downward, the gripper points downward, and
vice versa. Additionally, hand gestures, such as open-
ing or closing the palm, control the gripper (Servo
Motor 5). The gripper closes when the user’s hand
is closed and opens when the hand is open.
4.3 User Study of the Arm Actuation
Methods
To ensure an immersive user experience for the hu-
man controller, a user study was conducted with two
main objectives. The first objective was to test the in-
tegration of VR features into the system and evaluate
the performance of the VR-based features and actu-
ation methods compared to traditional methods (e.g.,
keyboard controls and dashboard buttons). The sec-
ond objective was to compare the three VR-based ac-
tuation methods for the robotic arm, identify the ad-
vantages and shortcomings of each, and determine the
most effective and immersive method based on the
collected data.
(a) Task 1: move the arm
close to the object.
(b) Task 2: pick up the ob-
ject (e.g., pen).
(c) Task 3: move the pen
to the target position.
(d) Task 4: Drop the object
(e.g., the pen).
Figure 8: The sequence of tasks in the user study.
The user study was conducted as follows: 15 vol-
unteers were randomly selected from the university,
and most of the volunteers were asked to test two of
the actuation methods, as we assumed that asking ev-
ery volunteer to test each of the actuation methods
could be overwhelming. In an effort to ensure fair-
ness and reduce bias, the methods each user evaluates,
as well as their evaluation order, are determined ran-
domly. Before each volunteer begins evaluating an
actuation method, they are provided with a detailed
explanation of control instructions for the respective
method. Once they complete the evaluation of the
first selected method, they are asked to take a 15-
minute break to reset and minimize confusion with
the upcoming selected method for evaluation. After
the break, the control instructions for the next method
are explained before the volunteer begins the subse-
quent evaluation. For each evaluation procedure, vol-
unteers were then asked to wear the Quest 2 headset
and perform a sequence of four tasks:
1. Move the arm close to the target object(e.g., a
pen), shown in Figure 8(a).
A Proposed Immersive Digital Twin Architecture for Automated Guided Vehicles Integrating Virtual Reality and Gesture Control
273
2. Use the gripper to pick up the target object, as
shown in Figure 8(b).
3. Move the arm to the target position, as shown in
Figure 8(c).
4. Open the gripper and drop the object to the target
position, as shown in Figure 8(d).
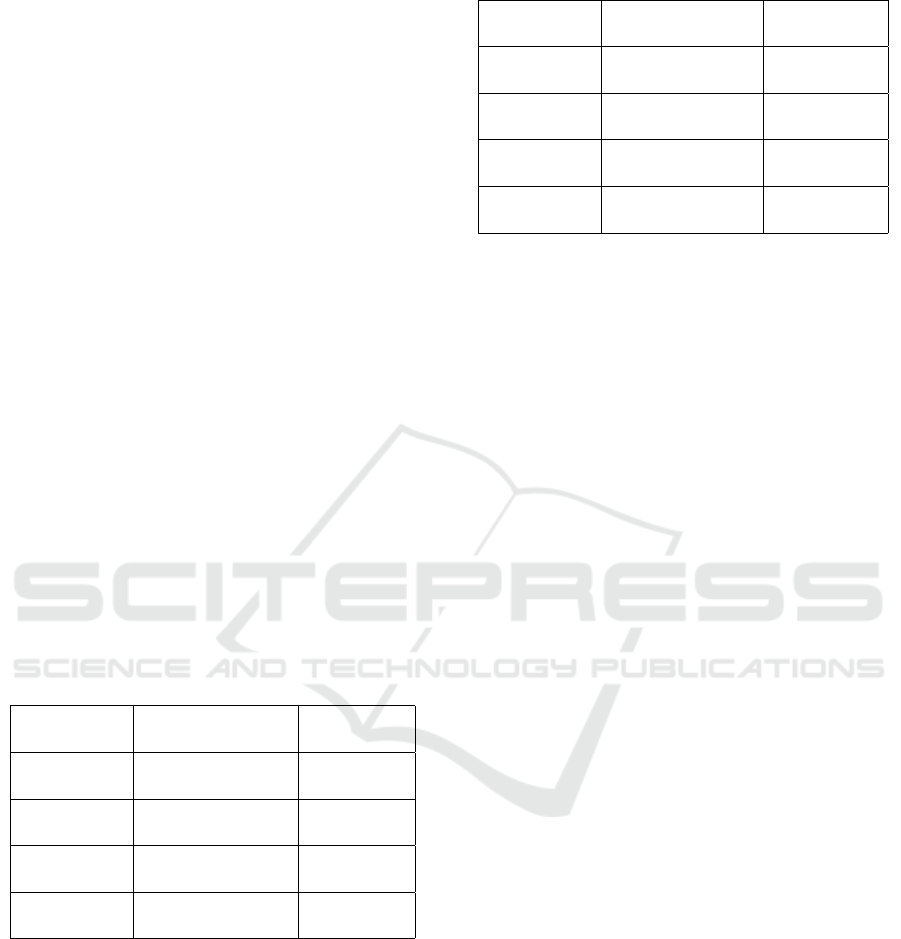
To achieve the objectives of this study, both quanti-
tative and qualitative metrics were specified. For the
quantitative metrics shown in Table 1, two key mea-
sures were chosen: (1) Completion time, defined as
the average time required for a volunteer to complete
the four aforementioned tasks; and (2) Offset error,
which represents the distance between the target po-
sition of the object (e.g., a pen) and its final position
after the volunteer’s attempt to complete the sequence
of tasks. These quantitative metrics provide objec-
tive and measurable data that helps assess the devel-
oped actuation methods. The completion time reflects
how efficient each method is, while the offset error
measures how accurate volunteers were in complet-
ing tasks. In contrast, qualitative metrics shown in
Table 2 capture subjective user experiences, focusing
on factors such as the intuitiveness of each actuation
method and the level of user satisfaction. These met-
rics are crucial for evaluating the actuation methods,
as they offer insights into how users perceive the sys-
tem and help assess the user-friendliness of the devel-
oped features, insights that cannot be easily inferred
from quantitative metrics alone.
Table 1: Quantitative Results of the user study.
Method Completion Time Offset error
(in minutes) (in cm)
Method 0 04:13 7.3
(Dashboard)
Method 1 03:36 6.67
(Sequential)
Method 2 03:34 7.72
(Numerical)
Method 3 01:28 2.2
(Intuitive)
As demonstrated in Table 1, all three novel VR-
based actuation methods resulted in faster comple-
tion times compared to the traditional dashboard but-
ton control method. The average completion time
for the traditional method was over 4 minutes (4:13),
while the average completion time for the VR-based
methods was notably lower, particularly for method
3 (1:28). These results clearly indicate that VR in-
tegration significantly improved efficiency, with vol-
unteers completing the tasks more quickly using the
VR-based actuation methods. Among the VR actu-
ation methods, method 3 proved to be the most ef-
Table 2: Qualitative Results of the user study.
Method User-Satisfaction Intuitiveness
(out of 5) (out of 5)
Method 0 3.1 2.4
(Dashboard)
Method 1 3.83 3.33
(Sequential)
Method 2 3.58 3.56
(Numerical)
Method 3 4.55 4.90
(Intuitive)
ficient (1:28), showing a substantial time difference
compared to methods 1 and 2 (around 3:30).
For the average offset error measurements shown
in Table 1, the offset error of the traditional dashboard
actuation method was not much larger than that of
methods 1 and 2, with all methods exhibiting an aver-
age offset error of around 7 centimeters, except for the
third VR-based method. Method 3 demonstrated sig-
nificantly better accuracy, with an average offset error
of only 2.2 centimeters, making it the most efficient
and accurate of the proposed methods.
The qualitative results presented in Table 2 show
that the traditional actuation method (method 0) re-
ceived the lowest user ratings in both intuitiveness
(2.6/5) and user satisfaction (2.1/5) compared to the
VR-based actuation methods. On the other hand,
the third VR-based method received the highest user
ratings, with a score of 4.9/5 for intuitiveness and
4.55/5 for user satisfaction, significantly outperform-
ing methods 1 and 2. The high user ratings for in-
tuitiveness, particularly for method 3, likely explain
why volunteers were able to complete the sequence
of tasks much faster (as shown in Table 1) compared
to the traditional dashboard method.
5 CONCLUSION AND FUTURE
WORK
Digital Twins are powerful tools that can be utilized
throughout the whole manufacturing life-cycle, from
designing and planning to maintaining existing facili-
ties. Additionally, they are beneficial for telepresence,
remote control, and situations where human presence
is risky, such as rescue missions. This paper presents
a novel and comprehensive framework for integrat-
ing Virtual Reality with a Digital Twin architecture,
using a Dockerized private cloud for minimal com-
munication latency. Our project yields significant in-
sights into the practical applications of Digital Twins
in robotics.
Through this research, the feasibility and effec-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
274

tiveness of integrating Digital Twins with robotic sys-
tems have been demonstrated, particularly in areas
such as robotic arm control, and virtual reality inter-
faces. The user study, in particular, shows the advan-
tages of integrating the VR interfaces in robot and
arm control. As the results of the user study clearly
show that the VR-based methods have generally per-
formed better than the traditional dashboard control
in almost all of the aforementioned quantitative and
qualitative metrics. Moving forward, future work will
focus on refining and expanding the capabilities of
Digital Twins in robotics for critical missions. This
includes exploring advanced AI algorithms for ob-
stacle avoidance and autonomous path suggestions,
as well as developing robust communication systems
for remote operation. Additionally, efforts will be
made to secure data within the Dockerized private
cloud to ensure the safety and integrity of sensitive
information. Future work will also focus on optimiz-
ing the system for portable, low-power hardware to
make it more adaptable in real-world scenarios. Fur-
thermore, we aim to extend the range of hand ges-
tures for actuation and allow user personalization to
improve the system’s versatility and user experience.
Finally, real-world testing and validation of our ap-
proach in simulated and controlled rescue scenarios
will be conducted, with the ultimate goal of deploy-
ing these technologies in emergency response situa-
tions to save lives and mitigate disaster impacts.
REFERENCES
Abdulla, R., Gadalla, A., and Balakrishnan, A. (2020). De-
sign and implementation of a wireless gesture con-
trolled robotic arm with vision.
Alexandru, M., Dragos, C., and Zamfirescu, B.-C. (2022).
Digital twin for automated guided vehicles fleet man-
agement. Procedia Computer Science.
Allspaw, J., LeMasurier, G., and Yanco, H. (2023). Com-
paring performance between different implementa-
tions of ros for... OpenReview.
Amsters, R. and Slaets, P. (2020). Turtlebot 3 as a robotics
education platform. In Chapter in Robotics Educa-
tion.
Attaran, M. and Celik, B. G. (2023). Digital twin: Bene-
fits, use cases, challenges, & opportunities. Decision
Analytics Journal.
Crespi, N., Drobot, A., and Minerva, R. (2023). The digital
twin: What & why? In Springer eBooks.
Ellethy, M. et al. (2023). A digital twin architecture for
automated guided vehicles using a dockerized private
cloud.
Estefo, P., Simmonds, J., Robbes, R., and Fabry, J. (2019).
The robot operating system: Package reuse and com-
munity dynamics. Journal of Systems and Software,
151:226–242.
Gallala, A., Kumar, A. A., Hichri, B., and Plapper, P.
(2022). Digital twin for human–robot interactions by
means of industry 4.0 enabling technologies. Sensors,
22(13):4950.
Gigante, M. (1993). Virtual reality: Definitions, history and
applications.
Mazumder, A. et al. (2023). Towards next-generation digital
twin in robotics: Trends, scopes, challenges, & future.
Heliyon, 9(2).
Pirker, J., Loria, E., Safikhani, S., K
¨
unz, A., and Rosmann,
S. (2022). Immersive virtual reality for virtual and
digital twins: A literature review to identify state of
the art and perspectives. In 2022 IEEE Conference
on Virtual Reality and 3D User Interfaces Abstracts
and Workshops (VRW), pages 114–115, Christchurch,
New Zealand.
Platt, J. and Ricks, K. (2022). Comparative analysis of ros-
unity3d and ros-gazebo for mobile ground robot sim-
ulation. Journal of Intelligent & Robotic Systems.
Riley, J. M. and Endsley, M. R. (2004). The hunt for sit-
uation awareness: Human-robot interaction in search
and rescue. Proceedings of the Human Factors and
Ergonomics Society Annual Meeting, 48(3):693–697.
Saddik, A. E. (2018). Digital twins: The convergence of
multimedia technologies. IEEE Journals & Magazine
– IEEE Xplore.
A Proposed Immersive Digital Twin Architecture for Automated Guided Vehicles Integrating Virtual Reality and Gesture Control
275
