
Self-Supervised Iterative Refinement for Anomaly Detection in Industrial
Quality Control
Muhammad Aqeel
a
, Shakiba Sharifi
b
, Marco Cristani
c
and Francesco Setti
d
Dept. of Engineering for Innovation Medicine, University of Verona, Strada le Grazie 15, Verona, Italy
Keywords:
Robust Anomaly Detection, Self-Supervised Learning, Iterative Refinement Process, Industrial Quality
Control.
Abstract:
This study introduces the Self-Supervised Iterative Refinement Process (IRP), a robust anomaly detection
methodology tailored for high-stakes industrial quality control. The IRP leverages self-supervised learning
to improve defect detection accuracy by employing a cyclic data refinement strategy that iteratively removes
misleading data points, thereby improving model performance and robustness. We validate the effectiveness
of the IRP using two benchmark datasets, Kolektor SDD2 (KSDD2) and MVTec-AD, covering a wide range
of industrial products and defect types. Our experimental results demonstrate that the IRP consistently outper-
forms traditional anomaly detection models, particularly in environments with high noise levels. This study
highlights the potential of IRP to significantly enhance anomaly detection processes in industrial settings, ef-
fectively managing the challenges of sparse and noisy data.
1 INTRODUCTION
Anomaly detection (AD) plays an indispensable role
in quality control in a wide range of manufacturing
industries, ensuring the integrity of materials such as
marble (Vrochidou et al., 2022), steel (Bo
ˇ
zi
ˇ
c et al.,
2021b), and leather (Jawahar et al., 2023). Accurately
detecting items that are non-compliant with product
specifications is crucial for maintaining product stan-
dards and consumer satisfaction. However, this task
is fraught with challenges, primarily due to the di-
verse and complex textures of the materials, the rarity
of defects, and the significant scarcity of accurately
labeled data necessary for effective supervised learn-
ing. Anomalies typically occupy only a tiny portion
of an image, making their detection difficult for hu-
man inspectors and automated systems. This chal-
lenge is compounded by the labor intensive and error-
prone nature of manually labeled training data, a pro-
cess that becomes increasingly unsustainable in high-
throughput manufacturing settings.
The evolution of anomaly detection in recent years
has increasingly leaned towards unsupervised and
a
https://orcid.org/0009-0000-5095-605X
b
https://orcid.org/0009-0008-6309-635X
c
https://orcid.org/0000-0002-0523-6042
d
https://orcid.org/0000-0002-0015-5534
self-supervised learning paradigms, prized for their
ability to operate without extensively labeled datasets.
These approaches, while innovative, presuppose the
existence of pristine training data, free from anoma-
lies (Ono et al., 2020; Beggel et al., 2020). This ideal
is seldom met in practical scenarios, where the inclu-
sion of even a few anomalous samples can severely
skew the learning process, leading to either too re-
strictive or overly permissive models. Models trained
under these conditions are prone to overfitting, result-
ing in many false positives during operational deploy-
ment. In contrast, including anomalies in the train-
ing set can escalate the incidence of false negatives,
severely undermining the system’s reliability.
To illustrate the severity of this issue, Fig. 1
demonstrates a decrease in AUCROC scores as noise
increases in the training data. Traditional detection
methods show a marked deterioration in performance
as data imperfections increase, highlighting their vul-
nerability. In contrast, our proposed Self-Supervised
Iterative Refinement Process (IRP) maintains a higher
level of performance, showcasing its robustness and
adaptability across a broad range of challenging con-
ditions. We deliberately limit our evaluation to sce-
narios where the noise does not render the data overly
corrupt, ensuring meaningful learning and generaliza-
tion. This decision reflects our commitment to devel-
oping a method that optimally balances performance
Aqeel, M., Sharifi, S., Cristani, M. and Setti, F.
Self-Supervised Iterative Refinement for Anomaly Detection in Industrial Quality Control.
DOI: 10.5220/0013178100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
173-183
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
173

Figure 1: Typical impact of noisy data in training an anomaly detection model.
with practical applicability in realistically noisy envi-
ronments.
Addressing these complexities requires a robust
detection system capable of navigating the intrica-
cies of noisy and incomplete data sets. Current ad-
vances in deep learning, such as autoencoders (Za-
vrtanik et al., 2022), generative adversarial networks
(GAN) (Luo et al., 2022), and discrete feature space
representations (Hu et al., 2022), offer promising
ways to improve anomaly detection. However, these
technologies still struggle with determining the opti-
mal anomaly score function, ensuring sufficient ro-
bustness against noise and outliers, and generalizing
effectively to novel, unseen data sets.
In response to these ongoing challenges, this pa-
per introduces a methodology named Self-Supervised
Iterative Refinement Process (IRP) specifically de-
signed for robust anomaly detection. This process
combines advanced machine learning techniques with
a cyclic data refinement strategy to iteratively enhance
the training data set quality, thereby significantly im-
proving the model’s performance and robustness. IRP
systematically identifies and removes the most mis-
leading data points based on a dynamically adjusted
scoring mechanism, thereby refining the model’s abil-
ity to generalize from normal operational data while
minimizing the influence of outliers.
The main contributions of this paper are as fol-
lows.
• We propose the Self-Supervised Iterative Refine-
ment Process (IRP), a robust training method-
ology that employs a cyclic refinement strategy
to enhance data quality and model accuracy in
anomaly detection systematically;
• The dynamic threshold adjustment mechanism
adapts the exclusion threshold based on a robust
statistical measure, ensuring precise and adaptive
outlier removal. This feature improves the sys-
tem’s ability to accurately identify and exclude
data points that do not conform to the expected
pattern, improving overall detection performance.
• We present an experimental validation of our
proposed methodology in two challenging public
datasets, namely KSDD2 and MVTec-AD, which
demonstrate significant improvements over tradi-
tional approaches and establish a new standard for
robustness in the field.
2 RELATED WORK
Detecting and identifying defects is crucial in man-
ufacturing to ensure processes function correctly.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
174

Anomaly detection involves identifying issues such as
scratches, blemishes, blockages, discoloration, holes,
and, in general, any surface or structural irregularity
on a manufactured item (De Vitis et al., 2020). Recent
surveys review AD’s state of the art from both techno-
logical and methodological perspectives (Chen et al.,
2021; Bhatt et al., 2021). Traditionally, AD can be
formulated as a supervised or unsupervised learning
problem. Supervised methods use both anomaly and
normal samples during training, while unsupervised
methods only use normal samples at training time.
While supervised methods achieve better results, the
high cost of annotated datasets and advances in gener-
ative AI have shifted focus towards unsupervised ap-
proaches. Many unsupervised methods rely on im-
age reconstruction using encoder-decoder networks
to spot anomalies by comparing original and recon-
structed images (Akcay et al., 2019; Defard et al.,
2021; Roth et al., 2022). These networks struggle
to reconstruct anomalous regions accurately, having
never encountered them during training, which can re-
sult in high false positive rates with variable training
data. To address this, (Zavrtanik et al., 2021) employs
a reconstruction network to restore normal appear-
ances in anomalous images, while another approach
introduces textual prompts describing defects as in
(Capogrosso et al., 2024; Girella et al., 2024). Com-
paring features instead of whole images also helps to
reduce false positives (Zavrtanik et al., 2022; Rudolph
et al., 2021).
Robust anomaly detection (RAD) addresses the
problem of mitigating the effect of bad annotations in
the training set. It has been widely studied in sev-
eral fields, using methods ranging from robust sta-
tistical techniques (Rousseeuw and Hubert, 2018) to
deep learning approaches like autoencoders (Beggel
et al., 2020; Zhou and Paffenroth, 2017) and recur-
rent neural networks (Su et al., 2019). These methods
all aim to reduce sensitivity to noise in the labeling
process. Alternatively, (Zhao et al., 2019) focused on
removing noisy labels while using high-performing
anomaly detectors. Here, a two-layer online learning
framework filters suspicious data and detects anoma-
lies from the remaining data. We argue that training
two different models (one for predicting data qual-
ity and one for anomaly detection) adds unnecessary
complexity. More recently, researchers have explored
self-supervised learning (SSL) as a promising avenue
for anomaly detection. SSL methods often rely on
adaptations of deep CNN for enhancing learning ca-
pabilities from unlabelled data (Bo
ˇ
zi
ˇ
c et al., 2021a;
Zhang et al., 2022; Tian and Jia, 2022), or using
domain-adaptation techniques (Zhang et al., 2021). In
our previous work (Aqeel et al., 2024), we demon-
strated that SSL could be effective in filtering badly
labeled data in the training set. This paper extends
our previous work by using an iterative refinement ap-
proach, which is based on statistical observations of
anomaly score estimation on the training set, to fur-
ther improve robustness and accuracy in anomaly de-
tection.
3 ITERATIVE REFINEMENT
PROCESS
The Iterative Refinement Process (IRP) introduces a
novel approach to significantly enhance the robust-
ness and accuracy of anomaly detection in an indus-
trial environment by applying advanced probabilis-
tic models to iteratively refine the training dataset.
Despite being agnostic with respect to the anomaly
detection model, for our preliminary evaluation of
the impact of our approach, we used the DifferNet
model (Rudolph et al., 2021), which provided foun-
dational insights into the potential refinements neces-
sary for handling complex anomaly detection in in-
dustrial settings. The DifferNet model employs a nor-
malizing flow-based architecture to provide precise
density estimations of image features extracted via a
convolutional neural network. DifferNet establishes
a bijective relationship between the feature space and
the latent space, enabling each vector to be uniquely
mapped to a likelihood score. This scoring is de-
rived from the model’s ability to discern common pat-
terns from uncommon ones, making it especially ef-
fective for detecting subtle anomalies often found in
defect detection scenarios. Initially, each data point
x
i
, which refers to a transformed image, is evaluated
using a probabilistic model tailored to anomaly detec-
tion. The model calculates an anomaly likelihood as
follows:
A(x
i
) = −log p(x
i
;θ) (1)
where p(x
i
;θ) is the probability density function of
the transformed image x
i
, with θ representing the pa-
rameters of the model. The framework engages in a
dynamic data refinement cycle, where each point is
assessed against an adaptive threshold calculated as
λ times the median of the anomaly scores, A(x
i
). If
any data point’s anomaly score exceeds this thresh-
old, it is removed to refine the dataset. The refined
dataset, denoted D
new
, excludes the most anomalous
data point, x
max
, where x
max
is the point with the max-
imum anomaly score exceeding the threshold. This
process of refinement and retraining on D
new
contin-
ues until the dataset achieves optimal stability and
performance. The steps involved in this refinement
process are elaborated in Algorithm 1, and the entire
Self-Supervised Iterative Refinement for Anomaly Detection in Industrial Quality Control
175
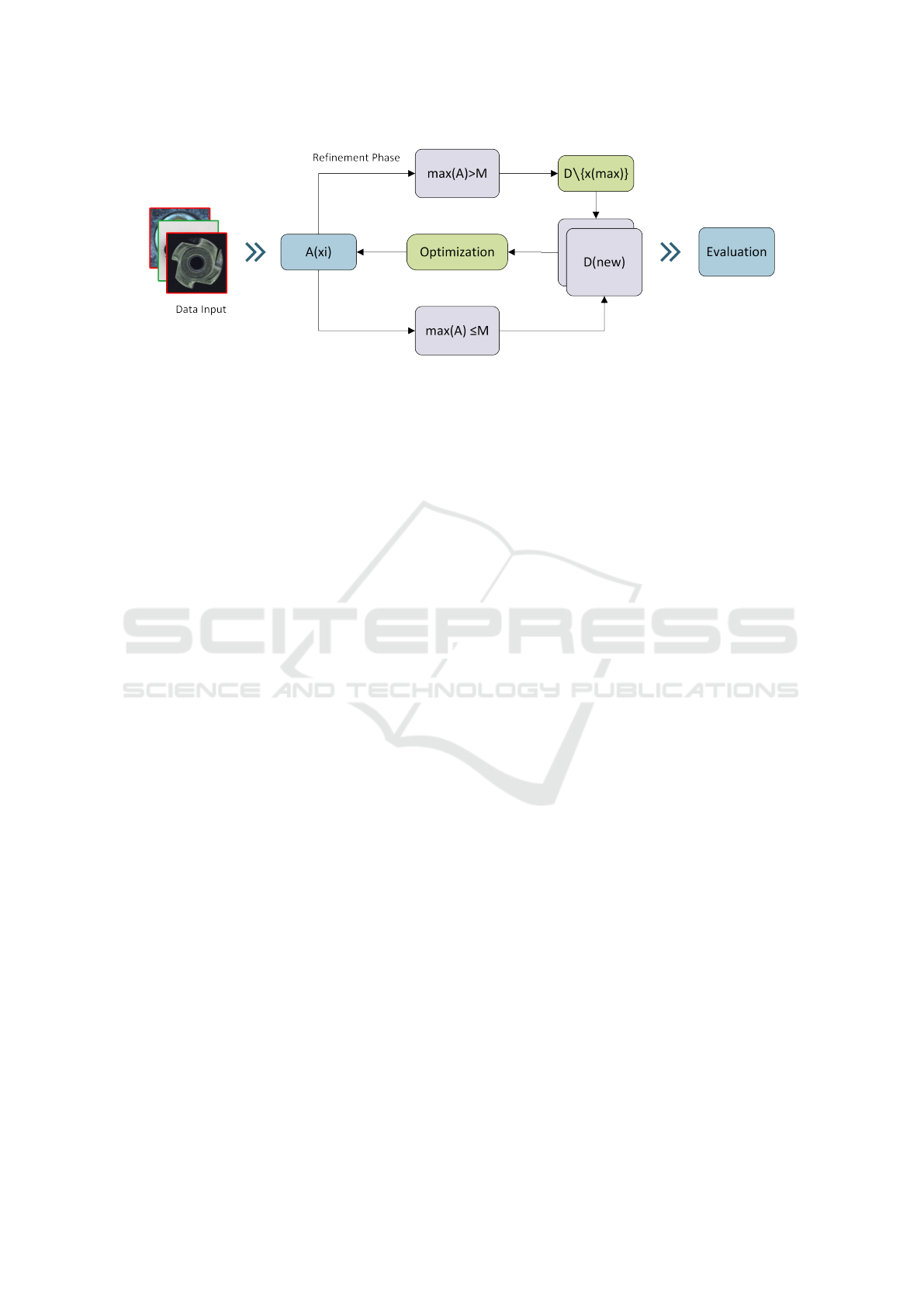
Figure 2: Illustrative schematic of the Iterative Refinement Process, demonstrating the independent cycle of training, valida-
tion, retraining, and testing.
sequence from data input through anomaly detection,
refinement, and final evaluation is illustrated in Fig. 2.
3.1 Probabilistic Anomaly Scoring
Mechanism and Dynamic
Refinement
Integral to DifferNet’s approach is a robust probabilis-
tic scoring system that enhances the accuracy and ro-
bustness of defect detection through dynamic refine-
ment processes. This anomaly detection framework
utilizes a convolutional neural network (CNN) as a
pretrained feature extractor, denoted as f
ex
, which is
not optimized further post-training. This extractor
transforms input data x ∈ X into a feature space Y ,
specifically:
y = f
ex
(x) ∈ Y (2)
These extracted features y are further processed by
a state-of-the-art normalizing flow model f
NF
, which
maps them into a well-defined latent space Z with a
known distribution p
Z
(z). This transformation is cru-
cial as it enables the precise estimation of the data’s
likelihood based on the latent representation:
z = f
NF
(y) where z ∼ N (0, I) (3)
The anomaly scores are derived directly from the
latent space by evaluating the likelihood of the trans-
formed features. A lower likelihood indicates a higher
probability of an anomaly, as it reflects the devia-
tion of the features from the model of ’normal’ data.
These scores are computed by averaging the negative
log-likelihoods of multiple transformed versions of an
image x, which are generated using a set of prede-
fined transformations T . The transformations T rep-
resent a collection of operations that perturb or mod-
ify the original data in controlled ways to simulate
variations that may highlight anomalies more clearly.
These transformations may include geometric modi-
fications, such as rotations, translations, and scalings,
or they may involve noise injections or other pertur-
bations that simulate real-world variations in the data.
The purpose of applying these transformations is
twofold. First, it helps with data augmentation by
generating multiple alternative versions of the input
data, thereby making the anomaly detection process
more robust to specific features of the original data.
Second, it stabilizes the anomaly scoring by reducing
the impact of random noise introduced by any single
transformation. By averaging the scores over several
transformed instances of the data, the final anomaly
score becomes more reliable, reflecting the underly-
ing anomaly rather than spurious noise.
For each transformation T
i
∈ T , the anomaly score
is calculated by applying T
i
to the input data x, pass-
ing it through the feature extractor f
ex
, and then map-
ping the resulting features to the latent space using the
normalizing flow model f
NF
. The final score is the ex-
pected value of the negative log-likelihoods of these
transformed instances, as shown in Equation 4. This
approach ensures that the anomaly score reflects the
data’s likelihood in the transformed space, improving
the robustness of the anomaly detection process by
incorporating multiple views of the data.
τ(x) = E
T
i
∈T
[−log p
Z
( f
NF
( f
ex
(T
i
(x))))] (4)
Our significant contribution is manifest in the
dynamic adjustment of the assessment threshold θ,
which is iteratively recalibrated in response to evolv-
ing data characteristics and directly influenced by the
statistical nature of the anomaly scores. We chose the
median as a central measure for thresholding due to
its robustness against outliers and skewed data distri-
butions. The median offers a more stable and rep-
resentative central tendency, particularly in datasets
where the majority of values are concentrated around
a certain range with a few extreme outliers. This char-
acteristic makes the median especially suitable for de-
termining thresholds in anomaly detection, where the
presence of anomalies can distort the distribution of
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
176

Algorithm 1: Iterative Refinement and Retrain-
ing.
Dataset of images D = {x
1
, x
2
, . . . , x
n
}
Pre-train model on D for N epochs
Compute anomaly scores A = {a
1
, a
2
, . . . , a
n
}
where a
i
= −log p(x
i
;θ)
Compute median of scores M = median(A)
if max(A) > λ ×M then
x
max
← x
i
where a
i
= max(A)
Delete x
max
from D
D
new
← D \{x
max
}
else
D
new
← D
Retrain model on D
new
repeat
Repeat steps 3 to 9
until Convergence
scores. The threshold defined as:
Threshold = λ ×M (5)
where λ is the scaling factor and M is the median of
the anomaly scores. This ensures that data points with
anomaly scores exceeding the threshold are consid-
ered outliers and are removed from the dataset.
D
new
= D
old
\ {x | τ(x) > Threshold} (6)
This iterative refinement process not only en-
hances the quality and performance of the model but
also stabilizes it at an optimal level. Moreover, this
method is designed not only to detect but also local-
ize anomalies within images, leveraging the gradient
of the loss function to clearly demarcate regions con-
tributing to anomalies, thus providing a robust mech-
anism for practical deployment in industrial quality
control systems.
4 EXPERIMENTAL RESULTS
This section presents the experimental results ob-
tained from applying the Iterative Refinement Process
(IRP) to anomaly detection. The experiments were
designed to evaluate the effectiveness of the IRP in
improving detection accuracy and robustness under
various conditions.
4.1 Datasets
We assess the performance of our approach using
two publicly available datasets, which are extensively
used to assess the robustness and effectiveness of de-
fect detection models:
Kolektor SDD2 (KSDD2): The KSDD2 dataset
(Bo
ˇ
zi
ˇ
c et al., 2021b) consists of RGB images
showcasing defective production items, meticulously
sourced and annotated by Kolektor Group d.o.o. The
defects vary widely in size, shape, and color, ranging
from minor scratches and spots to significant surface
faults. For uniform evaluation, all images are center-
cropped and resized to dimensions of 448×448 pix-
els. The training set comprises 2085 normal and 246
positive samples, while the testing set includes 894
negative and 110 positive samples.
MVTec-AD Dataset: The MVTec-AD dataset
(Bergmann et al., 2019) is utilized to demonstrate the
effectiveness of our proposed method across a vari-
ety of real-world industrial products. The MVTec-AD
dataset contains 15 different types of industrial prod-
ucts, encompassing over 70 different types of defects,
each labelled with both defect types and segmenta-
tion masks. To address the original lack of defective
images in the training set, we resampled half of the
defect images to include in our training data. The re-
vised training set contains 889 normal and 1345 de-
fective images, while the testing set comprises 1210
normal and 724 defective images.
4.2 Implementation Details
Experiments were conducted using PyTorch frame-
work. We resized images to 448 ×448 pixels and ap-
plied standardized preprocessing techniques, includ-
ing optional rotations and normalization. The net-
work architecture features three scales of input res-
olution, 8 coupling blocks within the normalizing
flow model, and fully connected layers in the scale-
translation networks each containing 2048 neurons,
with no dropout our proposed method’s effectiveness
across variousapplied. Training parameters are set
with a learning rate of 2 × 10
−4
, and the model un-
dergoes 400 epochs with batch size 96.
We compared our proposed methodology with ex-
isting models including DifferNet (Rudolph et al.,
2021) and One Shot Removal (OSR) (Aqeel et al.,
2024). DifferNet leverages a multi-scale feature ex-
traction process to assign meaningful likelihoods to
images, thereby facilitating defect localization. Dif-
ferNet represents also the model for feature extrac-
tion used in our self supervised procedure. OSR
enhances the robustness of surface defect detection
models through a novel training pipeline, which in-
volves initial training, anomalous sample removal,
and model fine-tuning.
The performance of our model was tested under
varying noise levels, from 0% to 50%. These noise
levels simulate the inclusion of bad samples typically
Self-Supervised Iterative Refinement for Anomaly Detection in Industrial Quality Control
177
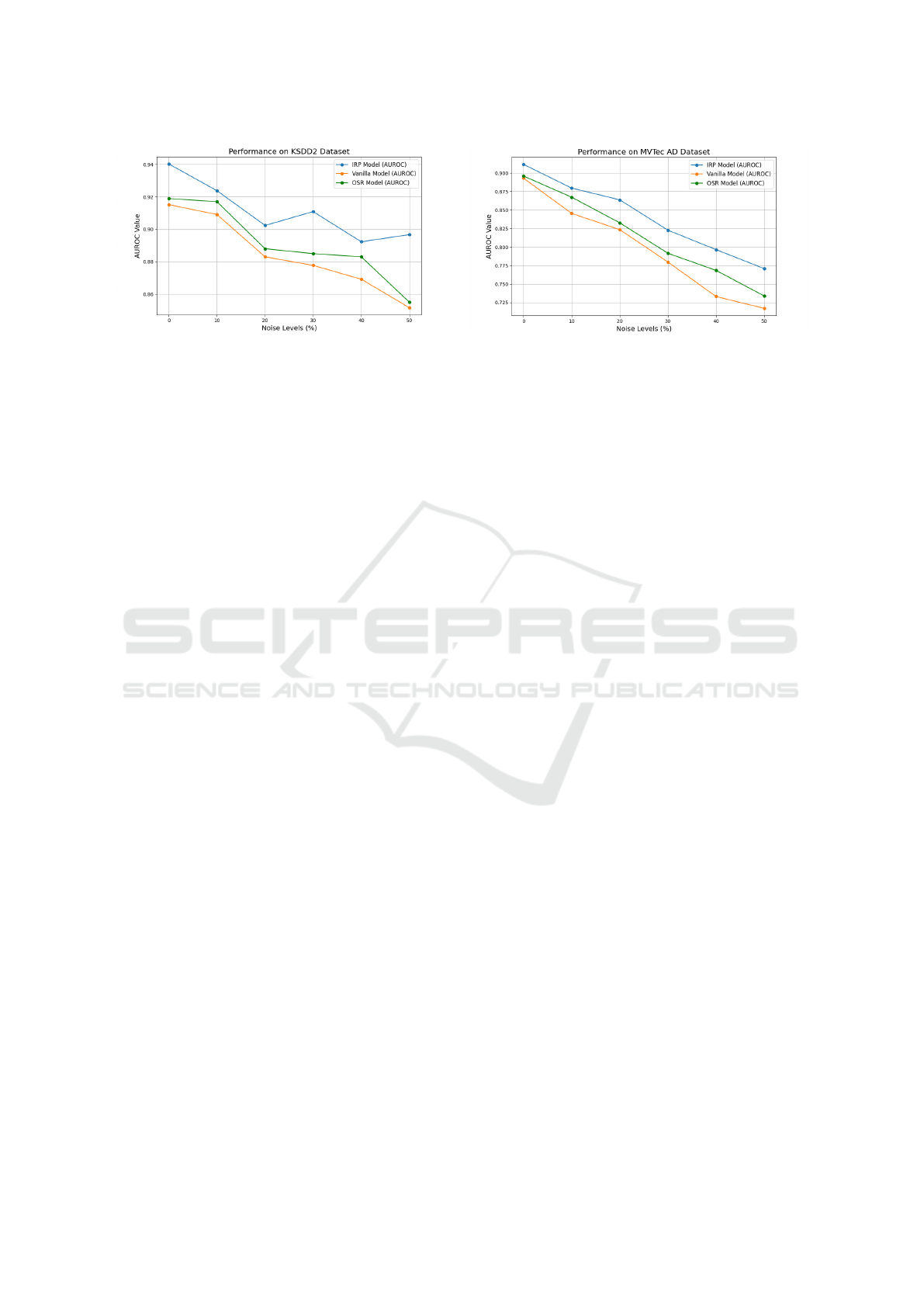
(a) KSDD2 (b) MVTec-AD
Figure 3: Figure (a) displays the performance trends of various models on the KSDD2 dataset, while figure (b) shows results
for the MVTec-AD dataset, across different noise levels. The graphs illustrate the models’ performance before and after
applying the IPR model: the blue line represents the IPR model, the green line denotes the OSR model, and the yellow line
illustrates the performance of the vanilla model.
encountered in unsupervised learning scenarios. We
measured the model’s performance using the AUROC
score across these noise levels, providing a reliable
indicator of its ability to distinguish between normal
and anomalous data. Each experiment was repeated
three times to ensure consistency and to assess the im-
pact of noise on detection accuracy.
4.3 Performance on KSDD2 Across
Varying Noise Levels
This section presents the evaluation results of the IRP
on the KSDD2 dataset. The analysis explores the
performance of the IRP model under different noise
levels, highlighting its defect detection capabilities in
challenging environments. As shown in Fig. 3, the
IRP model is compared against two conventional ap-
proaches—the traditional vanilla model (DifferNet)
and the One Shot Removal (OSR) model proposed
in (Aqeel et al., 2024). Across all tested noise levels,
the IRP model consistently outperforms the competi-
tors, demonstrating remarkable resilience by main-
taining superior AUROC values, as systematically
documented in Table 1.
The IRP model excels particularly at higher noise
levels. For example, at 50% noise, the IRP model
achieves a significantly higher AUROC of 0.8967 on
the KSDD2 dataset, while the vanilla and OSR mod-
els show notable declines. This robustness stems from
the IRP’s advanced noise-cancellation algorithms,
adaptive thresholding, and self-supervised feature ex-
traction, which enable effective handling of heavily
corrupted data.
Moreover, the statistical analysis accompanying
our findings reinforces the IRP model’s superiority.
The standard deviation values reported in Table 1 in-
dicate lower variability in performance across differ-
ent experimental runs, underscoring the model’s re-
liability and predictability. Such attributes are indis-
pensable in industrial applications, where the cost of
false negatives can be prohibitive, and the ability to
detect anomalies reliably is paramount. The com-
prehensive data presented in the table not only show-
cases the IRP model’s adaptability and robust perfor-
mance across diverse and challenging scenarios but
also highlights its viability as a potent tool for main-
taining stringent quality control standards in manu-
facturing processes. These findings suggest that the
IRP, through its self-supervised learning approach,
can be effectively deployed in industrial settings to
enhance defect detection where traditional models
might falter due to high variability in defect rates and
challenging noise conditions.
4.4 Performance on MVTec Across
Varying Noise Levels
The robustness and adaptability of IRP have been
rigorously evaluated across various product classes
within the MVTec-AD dataset, including Bottle, Ca-
ble, Capsule, Carpet, Leather, MetalNut, Pill, Screw,
Tile, and Zipper. Each class, with its distinct de-
fect types and unique challenges, served as an ideal
testbed for the IRP. We systematically varied the noise
levels in the dataset from 0% to 50% to meticulously
assess the IRP’s capabilities under progressively chal-
lenging conditions, using the Area Under the Curve
of the Receiver Operating Characteristic (AUROC)
to quantify defect detection accuracy across different
thresholds.
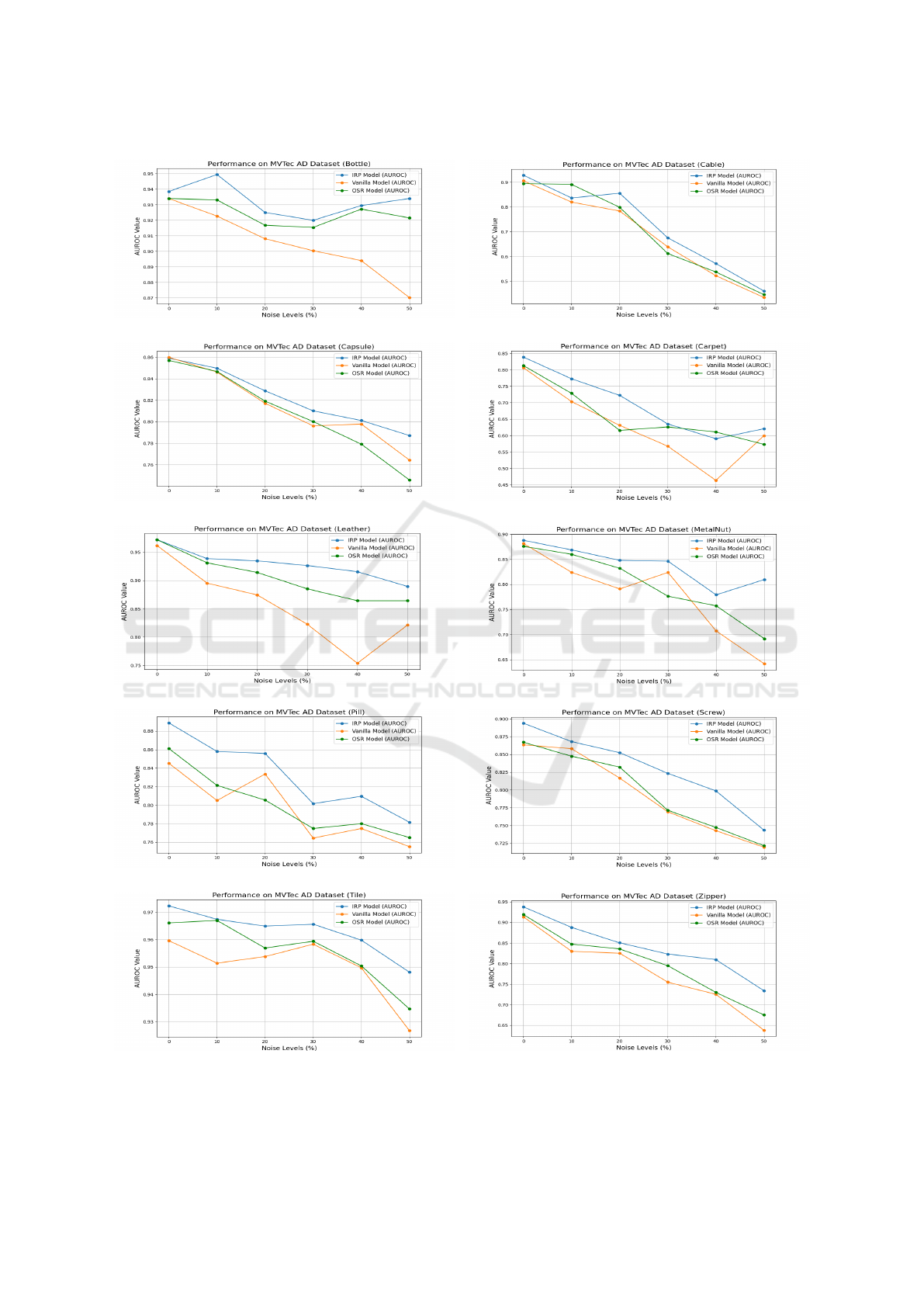
As illustrated in Fig. 4, the IRP model consis-
tently achieves high AUROC values across all classes,
demonstrating its robust ability to manage noise ef-
fectively. Notably, in classes with complex and vari-
able defect characteristics such as Screw and Cable,
the IRP exhibits exceptional resilience, showcasing
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
178
Table 1: AUROC scores of the IRP model at different noise levels for MVTec-AD and KSDD2 datasets.
Category Entity
Noise Level
0% 10% 20% 30% 40% 50%
Classes
Bottle 0.9386 0.9495 0.9250 0.9200 0.9295 0.9340
Capsule 0.8592 0.8498 0.8288 0.8102 0.8012 0.7872
Cable 0.9288 0.8368 0.8560 0.6756 0.5716 0.4604
Carpet 0.8386 0.7727 0.7222 0.6354 0.5905 0.6206
Leather 0.9722 0.9388 0.9348 0.9266 0.9157 0.8897
MetalNut 0.8880 0.8688 0.8480 0.8464 0.7792 0.8096
Pill 0.8888 0.8580 0.8558 0.8016 0.8096 0.7816
Screw 0.8938 0.8680 0.8524 0.8234 0.7988 0.7436
Tile 0.9723 0.9674 0.9649 0.9656 0.9598 0.9481
Zipper 0.9378 0.8880 0.8504 0.8232 0.8096 0.7340
Models
Vanilla 0.8931 0.8455 0.8235 0.7797 0.7331 0.7171
OSR 0.8960 0.8674 0.8327 0.7916 0.7684 0.7338
IRP on MVTec-AD 0.9118 0.8797 0.8638 0.8228 0.7965 0.7708
IRP on KSDD2 0.9403 0.9238 0.9024 0.9109 0.8923 0.8967
Standard Deviation ±0.0246 ±0.0149 ±0.0086 ±0.0518 ±0.0777 ±0.1099
its advanced anomaly detection capabilities. Con-
versely, in classes like Capsule and Pill, where defects
are more subtle, the IRP effectively distinguished be-
tween normal variations and actual defects, underlin-
ing its sophisticated feature extraction capabilities.
This uniform and robust performance across var-
ied classes and noise levels highlights the IRP model’s
adaptability and effectiveness in industrial applica-
tions, especially in environments with diverse and un-
predictable defect rates. The IRP’s ability to main-
tain high accuracy at elevated noise levels underscores
its potential as a dependable tool for quality control
in manufacturing environments. Furthermore, Fig. 3
provides an overarching view of the IRP’s perfor-
mance across the MVTec-AD dataset. This visual
representation emphasizes the IRP’s superior perfor-
mance relative to the vanilla and OSR models, mainly
as it consistently improves defect handling under in-
creasingly challenging conditions. This enhancement
affirms the IRP’s role as a robust and reliable quality
control instrument in complex manufacturing land-
scapes, where defect rates fluctuate significantly. Ta-
ble 1 complements these insights by detailing the AU-
ROC scores at various noise levels for the MVTec-
AD and KSDD2 datasets, including measures of er-
ror magnitude. This detailed presentation not only
confirms the performance stability of the IRP across
different settings but also highlights the model’s reli-
ability, evidenced by the low standard deviation in its
performance metrics.
4.5 Quantitative Analysis of Removed
Samples
This section presents a detailed quantitative analy-
sis of the samples removed during the defect de-
tection process for both the KSDD2 and MVTec-
AD datasets. This analysis is segmented by product
categories and noise levels, providing insights into
the effectiveness of the Iterative Refinement Process
(IRP) in improving defect detection accuracy. Ta-
ble 2 shows the number of good and bad samples
removed at various noise levels (0% to 50%) across
different product categories within the KSDD2 and
MVTec-AD datasets. The categories include Cable,
Capsule, Metalnut, Pill, Screw, and Zipper. Each
entry in the table specifies the count of good (non-
defective) and bad (defective) samples removed dur-
ing the training and validation phases. The accom-
panying image Fig. 5 illustrates the samples that were
removed during iterative refinement, showcasing both
defective samples, which exhibit noticeable defects
and noise patterns, and some good samples that were
also deleted as part of the refinement process.
The table indicates that at 0% noise, only good
samples are removed. This might seem counterin-
tuitive, but it can be explained by the fact that these
good samples are likely close to the decision bound-
ary, making them appear anomalous during the ini-
tial iterations of the IRP. Removing these borderline
good samples helps refine the model by reducing po-
tential noise and improving its generalization capabil-
ity. This phenomenon demonstrates the IRP’s ability
Self-Supervised Iterative Refinement for Anomaly Detection in Industrial Quality Control
179
(a) Bottle (b) Cable
(c) Capsule (d) Carpet
(e) Leather (f) MetalNut
(g) Pill (h) Screw
(i) Tile (j) Zipper
Figure 4: AUROC performance of the IRP across various classes of the MVTec-AD dataset. Each sub-figure demonstrates
the defect detection efficacy for a different class, illustrating the robustness and adaptability of the IRP in handling diverse
defect characteristics.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
180
Table 2: Images deleted at various noise levels for KSDD2 and MVTec-AD datasets, segmented by product categories.
Noise Level (%)
KSDD2 MvTec
Cable Capsule Metalnut Pill Screw Zipper
Good Bad Good Bad Good Bad Good Bad Good Bad Good Bad Good Bad
0% 11 0 6 0 16 0 14 0 17 0 15 0 19 0
10% 3 5 5 7 11 6 6 8 9 8 12 5 10 5
20% 3 7 5 9 5 12 5 11 5 11 6 9 8 9
30% 2 8 4 11 4 14 3 11 4 13 7 11 5 11
40% 4 12 3 12 2 13 2 9 5 12 6 10 6 14
50% 4 13 4 12 5 13 1 9 3 11 2 12 5 13
to fine-tune the model even when no bad samples are
present. As noise levels increase, the number of bad
samples removed rises, which is expected. However,
the table also shows that good samples remain re-
moved across all noise levels. This ongoing removal
of good samples close to the boundary helps main-
tain the model’s robustness by continuously refining
its decision boundaries.
The quantitative analysis of removed samples un-
derscores the IRP model’s capacity to enhance defect
detection accuracy through systematic refinement. By
removing samples close to the decision boundary, the
IRP improves the overall performance, even in the
absence of bad samples. As noise levels increase,
the model adeptly identifies and eliminates defective
samples while maintaining a balance by removing
borderline good samples. This approach fine-tunes
the model and ensures its robustness and reliability
in real-world industrial applications.
5 DISCUSSION
The robust performance of the Self-Supervised Iter-
ative Refinement Process (IRP) across varying noise
levels underscores its potential utility in industrial set-
tings, where defect patterns may be unpredictable.
The model’s ability to maintain high AUROC values
under increasing noise conditions illustrates its ca-
pacity to effectively distinguish subtle defect features
from normal variability, which is an essential attribute
for critical quality control environments.
While the model demonstrates strong perfor-
mance, there is scope to enhance its operational effi-
ciency. The current training setup, designed for mod-
erate scale and tailored to specific experimental con-
ditions, serves well under controlled scenarios. How-
ever, as we aim to deploy the model in more dy-
namic industrial settings, optimizing its capacity to
handle larger datasets and faster processing cycles
will be crucial. These enhancements are intended to
reduce the time required to reach model convergence
and increase image processing throughput, ensuring
the model can meet the demands of real-time defect
detection. Future developments could include refin-
ing the training algorithms to accelerate convergence
without compromising accuracy, and expanding the
system’s architecture to support more simultaneous
operations. These improvements will be critical for
deploying the model in environments where rapid
decision-making is essential. Furthermore, the de-
tailed analysis of different classes within the MVTec-
AD dataset highlights the IRP’s adaptability to di-
verse manufacturing scenarios. The pronounced re-
silience in classes with intricate defect patterns, such
as Screws and Cables, underscores the model’s so-
phisticated feature recognition capabilities, which are
likely bolstered by advanced data preprocessing and
anomaly scoring mechanisms. Further research could
focus on optimizing the model to enhance detection
accuracy in scenarios with extremely subtle defect
signals, such as those found in high-grade pharma-
ceutical manufacturing.
Future research efforts might also refine the prob-
abilistic models used within the IRP, enhancing their
sensitivity to minor anomalies and incorporating real-
time learning capabilities to adapt to new types of de-
fects as they emerge dynamically. Addressing the cur-
rent limitations by increasing the processing capac-
ity of the model and reducing dependency on lengthy
epoch training will be critical. Additionally, explor-
ing the integration of the IRP with other industrial
monitoring systems could broaden its applicability,
ensuring it remains a versatile and effective tool in
the rapidly evolving landscape of manufacturing tech-
nologies.
6 CONCLUSION
The experimental validation of the Self-Supervised
Iterative Refinement Process (IRP) presented in this
study underscores its substantial efficacy in enhanc-
ing anomaly detection across diverse industrial set-
Self-Supervised Iterative Refinement for Anomaly Detection in Industrial Quality Control
181

Figure 5: A visual representation of good (outlined in green) and defective (outlined in red) samples under different noise
levels. Defects are marked with red circles, illustrating the distribution of flaws within the samples.
tings. Employing robust statistical measures and so-
phisticated anomaly scoring mechanisms, the IRP
has consistently demonstrated superior performance
over traditional methods such as the vanilla model
and One Shot Removal (OSR) model, particularly
in environments characterized by high noise lev-
els. Through rigorous testing on the KSDD2 and
MVTec-AD datasets, the IRP not only achieved high
AUROC scores but also exhibited remarkable re-
silience against variable noise intensities, effectively
maintaining its defect detection capabilities even un-
der challenging conditions. The system’s ability to
accurately distinguish between defective and non-
defective items, even with subtle defect features,
highlights its potential as a critical tool for maintain-
ing high standards in industrial quality control. These
results validate the effectiveness of the IRP, showcas-
ing its adaptability to different defect types and its
robust performance across a spectrum of industrial
products. The study’s outcomes suggest that the IRP
can greatly enhance the precision and reliability of de-
fect detection systems, ensuring significant improve-
ments in quality assurance processes within manufac-
turing environments.
ACKNOWLEDGEMENTS
This study was carried out within the PNRR research
activities of the consortium iNEST (Interconnected
North-Est Innovation Ecosystem) funded by the Eu-
ropean Union Next-GenerationEU (Piano Nazionale
di Ripresa e Resilienza (PNRR) – Missione 4 Com-
ponente 2, Investimento 1.5 – D.D. 1058 23/06/2022,
ECS 00000043).
REFERENCES
Akcay, S., Atapour-Abarghouei, A., and Breckon, T. P.
(2019). GANomaly: Semi-supervised anomaly detec-
tion via adversarial training. In Asian Conference on
Computer Vision (ACCV).
Aqeel, M., Sharifi, S., Cristani, M., and Setti, F. (2024).
Self-supervised learning for robust surface defect de-
tection. In International Conference on Deep Learn-
ing Theory and Applications (DELTA).
Beggel, L., Pfeiffer, M., and Bischl, B. (2020). Robust
anomaly detection in images using adversarial autoen-
coders. In European Conference on Machine Learn-
ing and Knowledge Discovery in Databases (ECML-
PKDD).
Bergmann, P., Fauser, M., Sattlegger, D., and Steger, C.
(2019). Mvtec ad–a comprehensive real-world dataset
for unsupervised anomaly detection. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 9592–9600.
Bhatt, P. M., Malhan, R. K., Rajendran, P., Shah, B. C.,
Thakar, S., Yoon, Y. J., and Gupta, S. K. (2021).
Image-based surface defect detection using deep
learning: A review. Journal of Computing and In-
formation Science in Engineering, 21(4):040801.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
182

Bo
ˇ
zi
ˇ
c, J., Tabernik, D., and Sko
ˇ
caj, D. (2021a). End-to-end
training of a two-stage neural network for defect de-
tection. In International conference on pattern recog-
nition (ICPR). IEEE.
Bo
ˇ
zi
ˇ
c, J., Tabernik, D., and Sko
ˇ
caj, D. (2021b). Mixed su-
pervision for surface-defect detection: from weakly to
fully supervised learning. Computers in Industry.
Capogrosso, L., Girella, F., Taioli, F., Chiara, M., Aqeel,
M., Fummi, F., Setti, F., Cristani, M., et al. (2024).
Diffusion-based image generation for in-distribution
data augmentation in surface defect detection. In
International Joint Conference on Computer Vision,
Imaging and Computer Graphics Theory and Appli-
cations, volume 2, pages 409–416. SciTePress.
Chen, Y., Ding, Y., Zhao, F., Zhang, E., Wu, Z., and
Shao, L. (2021). Surface defect detection methods
for industrial products: A review. Applied Sciences,
11(16):7657.
De Vitis, G. A., Foglia, P., and Prete, C. A. (2020). Row-
level algorithm to improve real-time performance of
glass tube defect detection in the production phase.
IET Image Processing, 14(12):2911–2921.
Defard, T., Setkov, A., Loesch, A., and Audigier, R. (2021).
Padim: a patch distribution modeling framework for
anomaly detection and localization. In International
Conference on Pattern Recognition (ICPR).
Girella, F., Liu, Z., Fummi, F., Setti, F., Cristani, M., and
Capogrosso, L. (2024). Leveraging latent diffusion
models for training-free in-distribution data augmen-
tation for surface defect detection. In International
Conference on Content-based Multimedia Indexing
(CBMI).
Hu, M., Wang, Y., Feng, X., Zhou, S., Wu, Z., and Qin,
Y. (2022). Robust anomaly detection for time-series
data.
Jawahar, M., Anbarasi, L. J., and Geetha, S. (2023). Vision
based leather defect detection: a survey. Multimedia
Tools and Applications, 82(1):989–1015.
Luo, Z., He, K., and Yu, Z. (2022). A robust unsupervised
anomaly detection framework. Applied Intelligence,
52(6):6022–6036.
Ono, Y., Tsuji, A., Abe, J., Noguchi, H., and Abe, J. (2020).
Robust detection of surface anomaly using lidar point
cloud with intensity. The International Archives of the
Photogrammetry, Remote Sensing and Spatial Infor-
mation Sciences, 43:1129–1136.
Roth, K., Pemula, L., Zepeda, J., Sch
¨
olkopf, B., Brox, T.,
and Gehler, P. (2022). Towards total recall in indus-
trial anomaly detection. In IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR).
Rousseeuw, P. J. and Hubert, M. (2018). Anomaly detection
by robust statistics. Wiley Interdisciplinary Reviews:
Data Mining and Knowledge Discovery, 8(2):e1236.
Rudolph, M., Wandt, B., and Rosenhahn, B. (2021). Same
same but differnet: Semi-supervised defect detection
with normalizing flows. In IEEE/CVF Winter Confer-
ence on Applications of Computer Vision.
Su, Y., Zhao, Y., Niu, C., Liu, R., Sun, W., and Pei, D.
(2019). Robust anomaly detection for multivariate
time series through stochastic recurrent neural net-
work. In ACM SIGKDD International Conference on
Knowledge Discovery and Data Mining.
Tian, R. and Jia, M. (2022). Dcc-centernet: A rapid detec-
tion method for steel surface defects. Measurement,
187:110211.
Vrochidou, E., Sidiropoulos, G. K., Ouzounis, A. G., Lam-
poglou, A., Tsimperidis, I., Papakostas, G. A., Sarafis,
I. T., Kalpakis, V., and Stamkos, A. (2022). Towards
robotic marble resin application: Crack detection on
marble using deep learning. Electronics, 11(20).
Zavrtanik, V., Kristan, M., and Sko
ˇ
caj, D. (2021). Draem-
a discriminatively trained reconstruction embedding
for surface anomaly detection. In IEEE/CVF Inter-
national Conference on Computer Vision (ICCV).
Zavrtanik, V., Kristan, M., and Sko
ˇ
caj, D. (2022). DSR–
a dual subspace re-projection network for surface
anomaly detection. In European Conference on Com-
puter Vision (ECCV).
Zhang, C., Wang, Z., Liu, B., Xiaolei, W., et al. (2022).
Steel plate defect recognition of deep neural network
recognition based on space-time constraints. Ad-
vances in Multimedia, 2022.
Zhang, S., Zhang, Q., Gu, J., Su, L., Li, K., and Pecht,
M. (2021). Visual inspection of steel surface defects
based on domain adaptation and adaptive convolu-
tional neural network. Mechanical Systems and Signal
Processing, 153:107541.
Zhao, Z., Birke, R., Han, R., Robu, B., Bouchenak, S.,
Mokhtar, S. B., and Chen, L. Y. (2019). Rad: On-line
anomaly detection for highly unreliable data. arXiv
preprint arXiv:1911.04383.
Zhou, C. and Paffenroth, R. C. (2017). Anomaly detection
with robust deep autoencoders. In ACM SIGKDD In-
ternational Conference on Knowledge Discovery and
Data Mining.
Self-Supervised Iterative Refinement for Anomaly Detection in Industrial Quality Control
183
