
Beyond Data Augmentations: Generalization Abilities of Few-Shot
Segmentation Models
Muhammad Ahsan
1 a
, Guy Ben-Yosef
2 b
and Gemma Roig
1 c
1
Institute of Computer Science, Goethe University Frankfurt, Germany
2
GE Research, U.S.A.
Keywords:
Machine Vision, Deep Neural Networks, Meta-Learning, Few-Shot Learning, Semantic Segmentation.
Abstract:
Few-shot learning in semantic segmentation has gained significant attention recently for its adaptability in
applications where only a few or no examples are available as support for training. Here we advocate for a
new testing paradigm, we coin it half-shot learning (HSL), which evaluates model’s ability to generalise to
new categories when support objects are partially viewed, significantly cropped, occluded, noised, or aggres-
sively transformed. This new paradigm introduces challenges that will spark advances in the field, allowing
us to benchmark existing models and analyze their acquired sense of objectness. Humans are remarkably
exceptional at recognizing objects even when partially obstructed. HSL seeks to bridge the gap between
human-like perception and machine learning models by forcing them to recognize objects from incomplete,
fragmented, or noisy views - just as humans do. We propose a highly augmented image set for HSL that is
built by intentionally manipulating PASCAL-5
i
and COCO-20
i
to fit this paradigm. Our results reveal the
shortcomings of state-of-the-art few-shot learning models and suggest improvements through data augmenta-
tion or the incorporation of additional attention-based modules to enhance the generalization capabilities of
few-shot semantic segmentation (FSS). To improve the training method, we propose a channel and spatial
attention module (Woo et al., 2018), where an FSS model is retrained with attention module and tested against
the highly augmented support information. Our experiments demonstrate that an FSS model trained with the
proposed method achieves significantly a higher accuracy (approximately 5%) when exposed to limited or
highly cropped support data.
1 INTRODUCTION
Deep convolutional neural networks (CNNs) have
driven significant progress in various computer vision
tasks like image classification, semantic segmenta-
tion, and object detection during the past several years
(Lu et al., 2021). Recent advancement in CNNs cover
progress in layer design (Srivastava et al., 2015), ac-
tivation and loss functions (Janocha and Czarnecki,
2017), regularization (Moradi et al., 2020), optimiza-
tion and computational speed (Cheng et al., 2018).
However, gathering enough labeled data is notori-
ously tedious particularly for dense prediction tasks
like instance segmentation and semantic segmenta-
tion (Gu et al., 2018). Few-shot learning was intro-
duced to mitigate this frequent lack of annotated data.
a
https://orcid.org/0009-0000-5982-1979
b
https://orcid.org/0000-0002-4368-0750
c
https://orcid.org/0000-0002-6439-8076
The goal in few-shot learning (FSL) is to learn a new
concept representation from only a few annotated ex-
amples. This is achieved by learning feature repre-
sentations via meta-learning, thus being able to gen-
eralize the new unseen classes (Hu et al., 2018). For
few-shot segmentation (FSS), the input to the model
includes a query image Q as well as k support im-
ages {S
i
} and k masks {M
i
} in which a given sin-
gle object class C is annotated. The model then re-
turns a segmentation mask of the class C in the query
image Q. Typically, the class C is not seen during
training, namely the set of dataset classes S is split to
two disjoint sets, S
train
(seen classes) and S
test
(unseen
classes), and during inference C ∈ S
test
. The goal of
our work is to explore the limitations of current FSS
models, and to gain insights for further developing
novel improved architectures. To achieve our goal,
we are deep-diving into a few of the recent approaches
suggested for FSS tasks, namely prototype learning to
segment an object (Liu et al., 2020), learning through
430
Ahsan, M., Ben-Yosef, G. and Roig, G.
Beyond Data Augmentations: Generalization Abilities of Few-Shot Segmentation Models.
DOI: 10.5220/0013179200003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
430-438
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

fixed background for different foreground objects and
vice versa (Lang et al., 2022), a model training tech-
nique to make new-class adaptation more manageable
with the class weight transformer (Lu et al., 2021),
image segmentation learning with task-specific edge
detection (Chen et al., 2016), and prototype align-
ment networks (Wang et al., 2019a). To evaluate gen-
eralization capabilities of FSS models, we introduce
HSL which tests the ability of a model to generalise
to unseen categories when the support information is
highly augmented or limited (see Fig.1 and Sec. 3.1).
Based on insights from HSL, we propose a novel
training method to improve the generalization ability
of FSS models when exposed to highly augmented
support information. We integrate FSS model with
a channel & spatial attention module CBAM (Woo
et al., 2018), which benefits when highly augmented
or partial object information is used as a support for
training. Our primary contributions can be summa-
rized as fellows:
• We propose a challenging testing paradigm, called
HSL, for FSS models to evaluate their ability to
learn from partial object information.
• We propose a training method incorporating a
channel & spatial attention module (CBAM) to
improve the models’ performance in HSL scenar-
ios.
• We use Grad-CAM, a visualization technique that
leverages gradients to identify the importance of
spatial locations within convolutional layers.
2 RELATED WORK
The challenge of FSL has been an active area of re-
search for many years. In this work, we explore sev-
eral key components crucial to our study. First, we
discuss FSL, a paradigm that enable model to gener-
alize well from a limited number of training examples
where acquiring large labeled dataset is impractical
or expensive. Next, we delve into FSS, a specialized
application of FSL focused on accurately segmenting
different objects in images using only a few annotated
examples. Finally we examine the attention module,
a mechanism that improve the model performance by
allowing it to focus on most relevant input features.
2.1 Few-Shot Learning
FSL is the task of training models to generalize from
a small number of labeled examples to correctly clas-
sify or segment unseen samples. The main focus of
FSL is developing machine learning models suitable
for the real-world scenarios where obtaining a large
dataset is impractical or expensive. Most of the cur-
rent approaches in the FSL domain are based on a
meta-learning framework, where a base learner adapts
to new learning tasks derived from a base dataset to
simulate few-shot scenarios (Wang et al., 2019b).
In real-world applications, we are often confronted
with incomplete or imperfect data. While FSL aims
to address scenarios with limited examples, it still as-
sumes that the available data are reasonably complete
and high-quality. In contrast, HSL introduces the no-
tion of training and testing models with significantly
imperfect or partial data.
2.2 Few-Shot Segmentation
FSS addresses the challenge of segmenting new
classes with limited annotated data, crucial in do-
mains like medicine and agriculture. (Catalano and
Matteucci, 2024). In FSS, a model learns to identify
pixels in a query image that belong to a specific object
class, guided by the segmentation masks from only
a small number of support images (Li et al., 2021).
Traditional semantic segmentation models typically
rely on a significant amount of labeled data to achieve
good results and generally struggle to adapt to unseen
classes without additional fine-tuning. In response,
several robust network architectures have been de-
veloped, incorporating key techniques like SegGPT
as a generalist segmentation model that unifies var-
ious segmentation tasks into an in-context learning
framework (Wang et al., 2023a) dilated convolutions
(Yu and Koltun, 2015), encoder-decoder frameworks
(Ronneberger et al., 2015), multi-level feature ag-
gregation (Lin et al., 2017), and attention modules
(Huang et al., 2019). Previous studies typically ap-
proach FSS as a guided segmentation task. For in-
stance in (Hu et al., 2018), a base learner (support
branch) processes the support information to generate
parameters that guide the meta-learning framework in
predicting the mask for query images. (Zhang et al.,
2020) introduced masked average pooling to extract
support features, which became the foundational tech-
nique in FSS tasks. Due to the success of prototypical
networks, (Zhang et al., 2020) propose a dense proto-
type learning for segmentation and query mask pre-
diction. In our work we analyze that how training
with augmented support samples influences robust-
ness and generalization abilities. For example, in (Hu
et al., 2018) a late fusion is proposed where the sup-
port image branch predicts the weights of the top layer
of the query image branch. The Prototypical learning
approach is another method used for FSS which aims
to predict foreground and background classes by their
Beyond Data Augmentations: Generalization Abilities of Few-Shot Segmentation Models
431

similarity to learned prototypes (Wang et al., 2019a).
The PPNet model (Liu et al., 2020) performs proto-
type learning based on a decomposition of the holistic
object class into a set of part-aware prototypes. The
BAM model (Lang et al., 2022) introduces a new par-
allel branch base learner to the meta learner which is
to identify base classes and distinguishes the regions
of base classes from novel classes that do not need to
be segmented during inference.
2.3 Attention Module
CNN models are tried to be improved through mul-
tiple approaches, like developing a specialized op-
timizer (Rakelly et al., 2018), introducing adversar-
ial training methods (Wang et al., 2023b), or design-
ing specialized meta-architectures (Hu et al., 2018).
Another approach is to use attention blocks to en-
hance performance by re-calibrating channel-wise
feature responses through modeling channel inter-
dependencies. Another lightweight module, called
bottleneck attention module, is designed to enhance
performance by introducing the attention along both
channels and spatial axes. We proposed to incorpo-
rate and adapt the CBAM (Woo et al., 2018) in FSS
models, which adjusts weights based on the features
of the input data.
3 METHODS
For assessing HSL we perform a series of transfor-
mations on the support samples of two benchmark
PASCAL-5
i
, COCO-20
i
datasets. In this section we
presents the datasets, augmentations, training and
testing paradigms that we proposed to assess the at-
tention module and HSL task.
3.1 Half-Shot Learning
HSL introduces a more challenging scenario, where
the model is exposed to only a portion of the sup-
port objects, which are either partially visible, heav-
ily cropped or aggressively transformed. While state
of the art FSS models CWT (Lu et al., 2021), BAM
(Lang et al., 2022), PPNet (Liu et al., 2020), and
PANet (Wang et al., 2019a) have shown significant
progress in standard benchmarks, they are still sen-
sitive to modifications in the support information. In
this work, we focus on exploring the reduction of sup-
port information, its effects, and the robustness of ex-
isting models. For investigating HSL the task of se-
mantic segmentation is a natural choice, since seg-
mentation aims to divide an image into segments or
regions, each of which represents a separate object
or part of the image. The HSL task allows us to ask
whether and how much the model really learns to rep-
resent transformable knowledge about general object
structure, or if it rather has a strong focus on align-
ment of the support mask to the image. We illustrate
the HSL semantic segmentation in Figure 1. HSL
goes beyond few-shot learning by simulating real-
world scenarios, where objects are rarely fully visi-
ble or perfectly captured. Models trained in HSL are
evaluated on their ability to:
• Ignore spurious correlations (e.g., background
noise) and focus on core object features.
• Generalize effectively when object data is incom-
plete or adversarial.
• Handle occlusions and environmental noise, mak-
ing them more robust and practical for deploy-
ment.
HSL provides a more challenging benchmark for
evaluating a model’s robustness and ability to learn
meaningful, core features under difficult, imperfect
conditions.
3.2 Datasets and Augmentations
PASCAL-5
i
and COCO-20
i
are benchmarks used for
evaluation of FSS models. Both datasets are derived
from larger, well-known datasets (PASCAL VOC and
COCO), and they are restructured into subsets specif-
ically designed for FSL tasks.
3.2.1 Datasets
PASCAL-5
i
is an extension of PASCAL VOC and
also contains annotations from the Simultaneous De-
tection and Segmentation (SDS) dataset. The train set
and test set contains 5,953 and 1,449 images, respec-
tively. The 20 categories in the PASCAL-5
i
dataset
are divided into four folds (0, 1, 2, 3), and each
fold contains 5 disjoint classes. Data instances from
three folds are used for model training, and testing
performed using the fourth fold in a cross-validation
fashion. COCO-20
i
is larger and a more challeng-
ing dataset designed for different tasks like segmenta-
tion, key-point detection, and captioning dataset. The
dataset is divided into 4 splits (COCO-20i, where i =
(0, 1, 2, 3). The object categories are divided into four
folds, each containing 20 distinct classes. It provide
82,081 and 40,137 images for training and evaluation
respectively.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
432

Figure 1: Illustrate the HSL for semantic segmentation. In typical FSL scenarios, the support set consists of complete, clean,
and fully observable examples of each class. HSL introduces a more difficult scenario, where the model is exposed to half of
the support objects that are either partially viewed, significantly cropped, or noised. The goal is to test the model’s ability to
generalize under adversarial conditions. We propose to use a set of augmentations and perturbations in the support image and
mask, while keeping the query in the original form.
3.2.2 Augmentations
We apply the following augmentations as shown in
Figure 1 to test HSL on both datasets PASCAL-5
i
and
COCO-20
i
:
• Flip: Both Horizontal-Flip and Vertical-Flip used
with probabilities like p=0.5 & 1 that mirrored the
objects along the horizontal, vertical or both axis.
• Rotate: We randomly apply affine transformations
to scale, translate and rotate the input images. By
rotating images in various angles, the dataset be-
comes more diverse, helping models generalize
better by learning rotational invariance. Specifi-
cally, we apply four rotate limits with angles 10
◦
,
20
◦
, 45
◦
and 90
◦
respectively.
• Crop: The center-crop operation focuses on the
center of the image, assuming that the most im-
portant or relevant information is likely to be in
the middle of the image. We apply the center-crop
to support images and labels with four different
variations, including 20%, 40%, 60%, and 80%.
• Noise: Noise reduces image clarity, making it
harder to distinguish details. Gaussian Noise actu-
ally sampled the complete noise with all channels
of the images. So, it is still imperfect information
for the model to learn about the object class.
• Superpixels: With Superpixels we transformed
the input images to their superpixel representation
partially or completely with p = 0.5 or 1.
• Irrelevant Support: We provide irrelevant support
images to the model like support samples have ir-
relevant category, different from the query image,
this also results in poor generalization to new data.
3.3 Models
FSS is a deep learning technique that makes a pre-
trained model capable of segmentation of new cate-
gories of data that are unseen to the model. We chose
the following four FSS models:
CWT: Classifier Weight Transformer model devel-
oped to make new-class adaptation more manageable
through concentrate on classifier-part rather than to
meta-learn the entire complex model (Lu et al., 2021).
BAM: A new perspective on FSS to identify the re-
gions that do not need to be segmented, they proposed
an additional branch namely base learner to specifi-
cally predict the base class regions (Lang et al., 2022).
So, the irrelevant objects in the query images can be
concealed significantly. Gram Matrix used to dif-
ferentiate the image scenes and extend the proposed
approach to a setting namely, i.e., generalized FSL,
which simultaneously identifies the targets of base
and novel classes.
PPNet: Part-aware Prototype Network decompose the
holistic class representation into a set of part-aware
prototypes. The network consists of three parts, first
is Embedding Network to compute the convolutional
feature maps of the images, second is Prototypes Gen-
eration Network that extracts a set of part-aware pro-
totypes and third is Part-aware Mask Generation Net-
work that generates the final semantic segmentation
of the query images (Liu et al., 2020).
PANet: The PANet, prototype alignment network,
where they learn class-specific high quality proto-
types with non-parametric metric learning from a few
support samples (Wang et al., 2019a). They also
present a prototype alignment regularization among
support and query images.
Beyond Data Augmentations: Generalization Abilities of Few-Shot Segmentation Models
433

3.4 Training / Testing Paradigms
CWT, BAM, PPNet, and PANet as our baseline FSS
models to evaluate their performance on the HSL task.
Experiments performed with pre-trained and retrained
models with our customized settings, incorporating
data augmentations.
3.4.1 Train Normal and Test with Augmentation
Models are trained using default configurations and
reproduced the original results for all of the tested
standard FSS models. We subsequently applied vari-
ous augmentations to the support images to evaluate
the robustness and generalization capabilities of FSS
models.
3.4.2 Train and Test with Augmentations
Models are trained using highly augmented support
images, which provide limited information for the
models to learn from and also testing them against the
augmented dataset.
3.4.3 Train with Attention Module
To enhance the resilience and ability to learn from
limited support information, we suggest incorporating
the Convolutional Block Attention Module, CBAM
(Woo et al., 2018), which adjusts weights based on the
input features. This boost the representation capacity
by using attention modules, emphasizing key features
while reducing the focus on less relevant ones (Xu
et al., 2015; Gregor et al., 2015). CBAM has two se-
quential components, channel and spatial, which dy-
namically refine the intermediate feature map at every
convolutional block. CBAM infers a 1D channel at-
tention map M
c
∈ R
C×1×1
and a 2D spatial attention
map M
s
∈ R
1×H×W
when given an intermediate fea-
ture map F ∈ R
C×H×W
as input as illustrated below:
F
′
= M
c
(F) ⊗ F
F
′′
= M
s
(F
′
) ⊗ F
′
(1)
where F
′′
is the final refined output and ⊗ denotes
element-wise multiplication. Spatial information of a
feature map combined by using both average-pooling
and max-pooling: F
c
avg
and F
c
max
, and compute the out-
put feature vectors using element-wise summation.
The channel attention is computed as:
M
c
(F) = σ(MLP(AvgPool(F)) + MLP(MaxPool(F)))
= σ(W
1
(W
o
(F
c
avg
)) +W
1
(W
o
(F
c
max
)))
(2)
where W
o
, W
1
are the MLP weights, ReLU activation
function is followed by W
o
and σ denotes the sigmoid
function. Channel information of a feature map ag-
gregated by using two pooling operations performed
to generate 2D maps: F
s
avg
and F
s
max
, these maps are
concatenated and convolved by a standard convolu-
tion layer to prodcuce 2D spatial attention map. The
spatial attention is computed as:
M
s
(F) = σ( f
7×7
([AvgPool(F); MaxPool(F)]))
= σ( f
7×7
([F
s
avg
;F
s
max
]))
(3)
where σ denotes the sigmoid function and f
7×7
rep-
resents a convolution operation.
4 EXPERIMENTAL RESULTS
Experimental results involved training and testing
paradigms to investigate augmentation influence us-
ing the benchmark datasets PASCAL-5
i
and COCO-
20
i
described in details.
4.1 Train Normal and Test with
Augmentation
Models are trained using standard configurations and
tested against HSL method and presented results in
Table 1.
All four models performed well in the flip exper-
iments; however, PPNet and PANet experienced ac-
curacy losses of 6% & 9% respectively. In the Shift-
Scale-Rotate experiments, CWT and BAM performed
better, while PPNet and PANet decline in accuracy as
the rotation angles increased from 10
◦
to 90
◦
. All FSS
models experienced significant accuracy losses with
cropped support images. The BAM model, which
outperformed the other FSS models, lost approxi-
mately 14% accuracy. The models unable to learn
sufficiently from the partial or incomplete support in-
formation. All FSS models experienced a drop in
performance when exposed to noisy data. Among
them, BAM lost 15% accuracy; however, it still out-
performed the other models. Compared to noise, all
models demonstrated better performance with the su-
perpixel representation of the support images. Models
tend to be more confused by the irrelevant support but
perform better when provided with partial views.
4.2 Train and Test with Augmentation
Training and testing performed with highly aug-
mented support information alongside standard query
images. Table 1. Models retrained with augmenta-
tions demonstrate only a slight increase in accuracy of
1-2% in some cases compared to those that were not
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
434
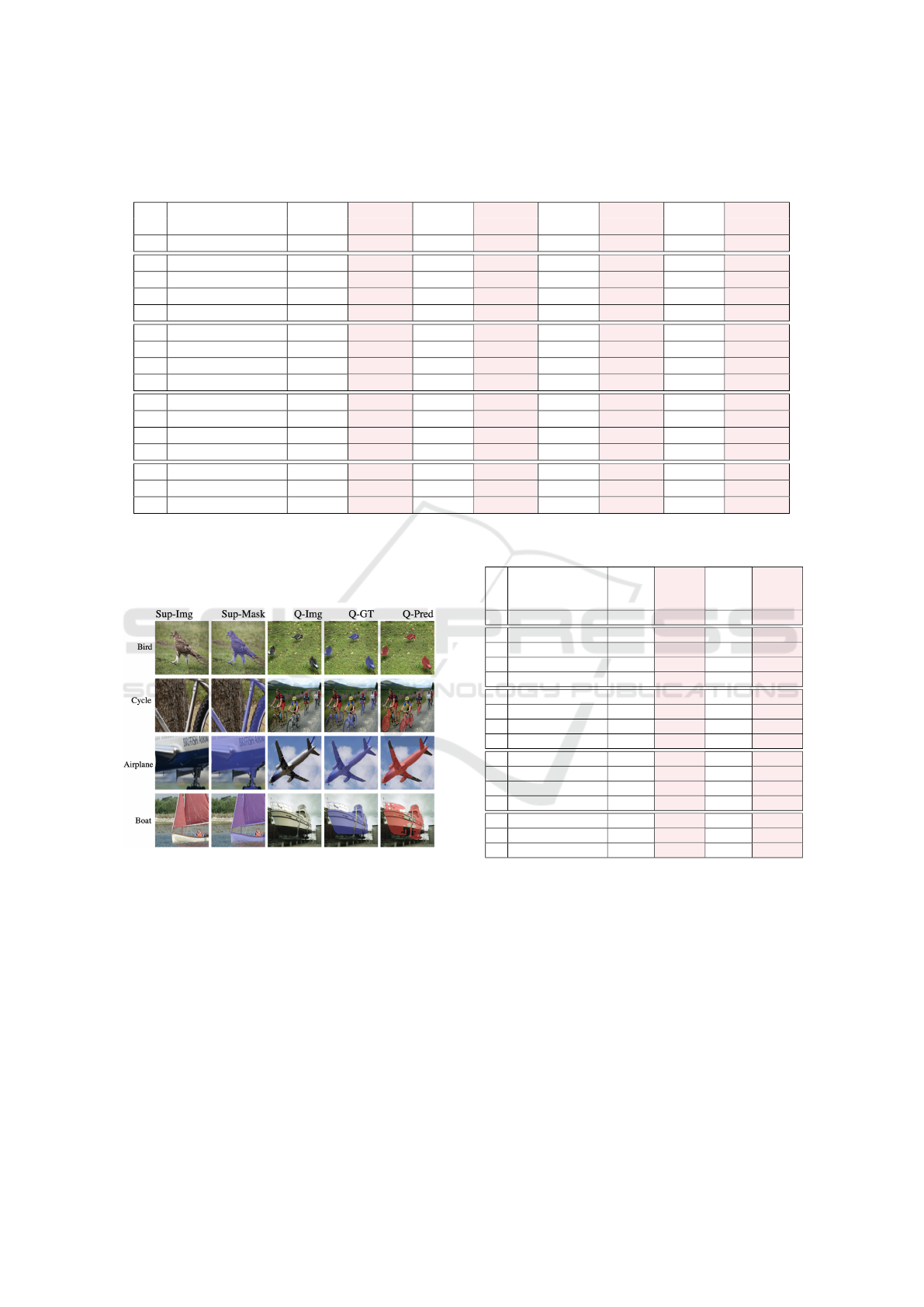
Table 1: Performance comparison of different Few-Shot Segmentation (FSS) models on highly augmented PASCAL-5i data.
The white column represents the mIoU performance when the models are tested on the augmented dataset, while the pink
column shows the performance when the models are both trained and tested on the augmented dataset.
# Augmentation CWT CWT BAM BAM PPNet PPNet PANet PANet
w/ Aug w/ Aug w/ Aug w/ Aug
0 Baseline 56.40 – – 67.81 – – 55.16 – – 48.10 – –
1 Hor-Flip(p=0.5) 56.34 56.32 67.76 67.80 51.62 52.60 46.46 46.57
2 Hor-Flip(p=1) 55.30 56.24 67.56 67.61 46.88 46.54 38.08 38.41
3 Ver-Flip(p=0.5) 56.18 56.20 67.76 67.72 51.42 52.50 46.34 46.43
4 Ver-Flip(p=1) 55.48 56.71 66.39 67.62 44.39 44.61 37.28 38.74
5 Sh-Rot(L=10) 55.16 56.85 67.60 67.70 46.26 46.11 36.73 36.17
6 Sh-Rot(L=20) 54.50 55.81 66.49 67.50 45.67 45.72 35.46 35.50
7 Sh-Rot(L=45) 54.84 55.65 66.22 67.11 44.21 44.83 34.52 35.82
8 Sh-Rot(L=90) 53.71 55.62 64.40 66.83 44.19 44.27 35.11 36.22
9 C-Crop(20%) 37.20 39.19 53.59 55.82 26.13 26.71 23.34 23.54
10 C-Crop(40%) 46.41 48.76 64.00 65.29 41.56 41.37 31.66 32.91
11 C-Crop(60%) 51.80 53.80 66.83 67.91 42.77 42.61 36.05 37.16
12 C-Crop(80%) 55.49 56.29 67.66 67.41 42.65 42.51 37.0 37.84
13 GaussNoise(p=.5) 28.96 29.65 52.26 52.02 19.54 19.17 21.90 22.82
14 Superpixels(p=.5) 40.53 41.37 63.72 65.18 35.72 36.27 31.39 32.63
15 Irrel-Support 31.73 31.16 47.86 48.61 23.27 23.48 24.62 24.42
retrained with augmentations. An interesting insight
is that the models do not effectively utilize partial sup-
port views even when trained to do so as shown in
Figure. 2 as well.
Figure 2: Segmentation results using the proposed method
under HSL settings. The method is applied with the BAM
model on the PASCAL-5
i
dataset. First row displays sam-
ples without any augmentation and remaining rows shown
results obtained with highly cropped dataset where air-
planes and boats indicates that predictions are less accurate
compared to the ground truth.
Table 2 presents the performance of CWT and
BAM models with another benchmark COCO-20
i
.
Experiments demonstrate that both models exhibit
varying degrees of robustness when subjected to dif-
ferent types of augmentations. In Flip and Rotate,
models demonstrated better performance, with only
2% decrease in accuracy as the rotation angle var-
ied from 10
◦
to 90
◦
. Exp#9-12 demonstrate that
Table 2: Training and sesting of FSS models on augmented
COCO-20
i
dataset.
# Augmentation CWT CWT BAM BAM
w/
Aug
w/
Aug
0 Baseline 32.90 – – 46.23 – –
1 Hor-Flip(p=0.5) 31.64 32.21 45.27 46.22
2 Hor-Flip(p=1) 31.42 31.55 45.19 46.13
3 Ver-Flip(p=0.5) 32.12 32.43 45.20 46.26
4 Ver-Flip(p=1) 28.74 29.48 44.06 46.58
5 Sh-Rot(L=10) 30.50 30.13 45.36 46.29
6 Sh-Rot(L=20) 29.18 30.27 45.23 46.38
7 Sh-Rot(L=45) 29.55 29.52 45.07 46.87
8 Sh-Rot(L=90) 28.38 29.31 44.51 45.31
9 C-Crop(20%) 19.63 19.86 34.72 36.38
10 C-Crop(40%) 25.18 26.63 36.25 38.56
11 C-Crop(60%) 28.96 29.19 42.27 44.17
12 C-Crop(80%) 31.14 31.73 44.81 47.96
13 GaussNoise(p=.5) 22.06 22.19 36.70 38.47
14 Superpixels(p=.5) 25.10 25.41 37.36 38.82
15 Irrel-Support 17.66 17.89 28.89 30.31
BAM consistently outperforms CWT when dealing
with highly cropped data. Models similarly strug-
gled in the Gaussian Noise experiment, CWT per-
forms poorly with an IoU of 22.19, while BAM shows
a stronger performance with an IoU of 38.47. With
superpixel representations, CWT achieves an IoU of
25.41, while BAM again outperforms with an IoU of
38.82. This shows that both models can handle su-
perpixel data better than noisy data, but BAM main-
tains a clear advantage. CWT with irrelevant support,
achieving an IoU of only 17.89, while BAM performs
better with an IoU of 30.31. This indicate that both
models are confused by irrelevant support, but BAM
is more robust in these challenging conditions.
Beyond Data Augmentations: Generalization Abilities of Few-Shot Segmentation Models
435
4.3 Train with Attention Module
Upon analysis, we observed that BAM consistently
demonstrates superior performance compared to the
other models, particularly when tested against highly
cropped images. This indicates BAM’s better gener-
alization abilities towards incomplete or partial sup-
port information. Therefore, for further experimenta-
tion, we selected BAM model to extend with the inte-
gration of an attention module, CBAM, which serves
as a simple yet effective weight adjustment mecha-
nism based on the features of the input data. At-
tention modules have proven to be effective in var-
ious visual tasks such as image classification, ob-
ject detection, and semantic segmentation (Woo et al.,
2018). Models utilizing VGG/ResNet as a backbone,
such as BAM, can jointly train the combined CBAM-
enhanced networks, integrated CBAM with the Res-
Blocks in ResNet (He et al., 2016). Representation
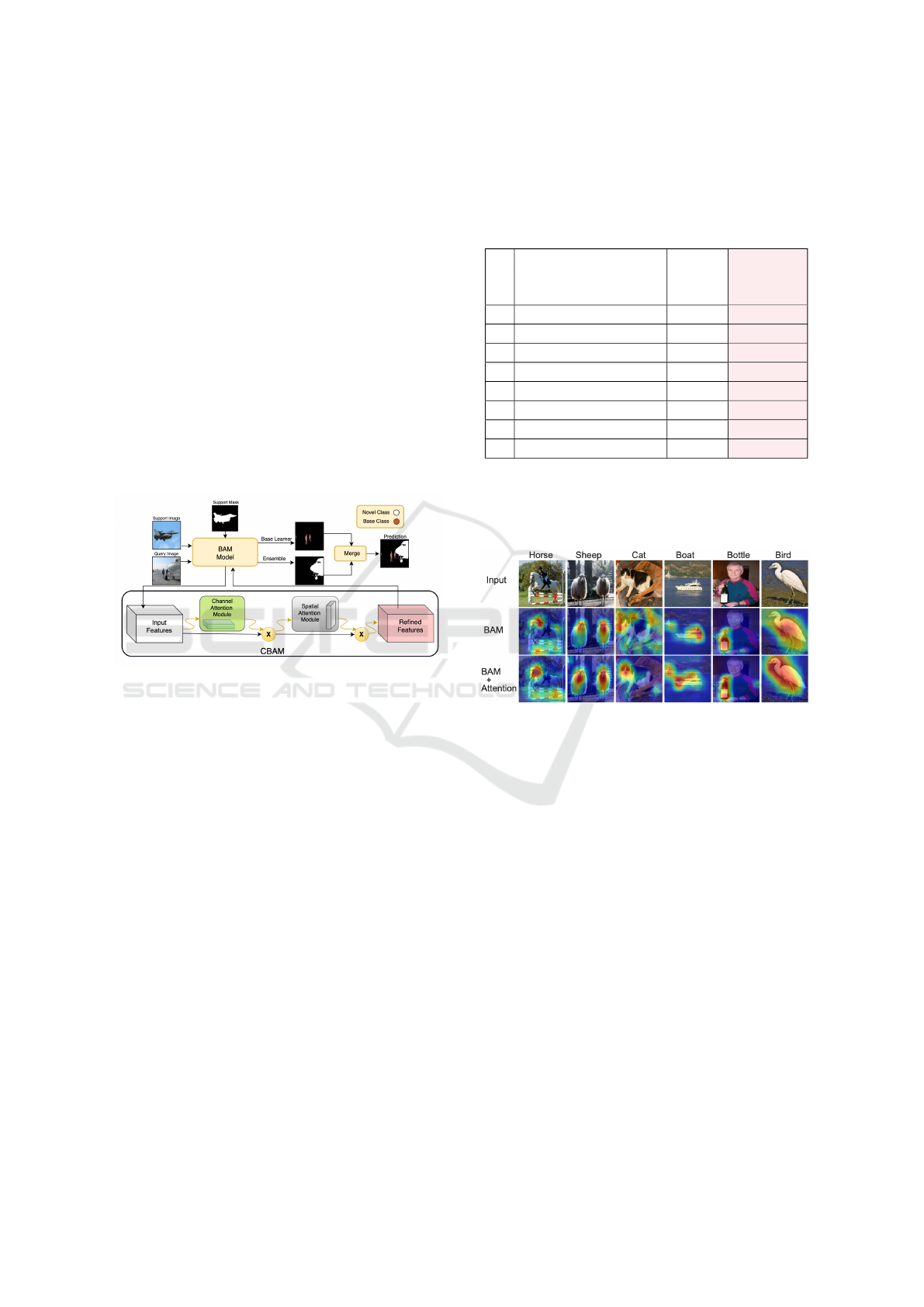
Figure 3: BAM model with an attention module. The mod-
ule consists of two sequential sub-modules: channel and
spatial. The intermediate feature map is adaptively refined
through the CBAM module at each convolutional block of
deep networks.
capacity enhanced through attention modules which
prioritizing important features while minimizing ir-
relevant ones (Xu et al., 2015; Gregor et al., 2015).
CBAM adaptively refines the intermediate feature
map at each convolutional block of deep networks
(see Fig 3). Table 3 clearly depicts generalization
capability of the BAM model enhanced against aug-
mented support information. Training of BAM with
attention module achieves approximately 2% - 5%
higher accuracy when tested with rotated and highly
cropped data (exp# 4,5 in Table 3).
We employ Grad-CAM (Selvaraju et al., 2020) as
a visualization technique that leverages gradients to
assess the importance of spatial locations within con-
volutional layers. Grad-CAM activation highlights
specific regions of the input image using an attention
heatmap, indicating the areas that are most crucial for
detecting a particular class of interest (Selvaraju et al.,
2020). For qualitative analysis, we compare the vi-
sualization results of baseline BAM and BAM with
Table 3: Performance comparison of BAM model and BAM
with Attention module on the highly augmented PASCAL-
5i dataset. The first column shows the mIoU performance
of the BAM model when tested on the augmented dataset,
while the second pink column presents the improved perfor-
mance of the BAM+Attention model on the same test data.
# Augmentation BAM BAM
w/
Attention
0 Baseline 67.81 – –
1 VerticalFlip(p=1) 66.39 67.81
2 Hor-Flip(p=1) 67.59 67.96
3 Sh-Rot(L=20) 66.53 67.29
4 Sh-Rot(L=90) 64.41 67.74
5 C-Crop(20%) 53.57 58.69
6 GaussNoise (p=1) 52.41 53.48
7 Superpixels (p=1) 63.39 65.71
the attention module. Figure 4 illustrates the results
of Grad-CAM, demonstrating BAM model integrated
with the attention module provides slightly better in-
sightful explanations.
Figure 4: Examples of feature importance visualizations.
5 CONCLUSION
Design and evaluation of the HSL task, where sup-
port images contain only partial object information.
In comparison to control case, where no support im-
age is provided namely Irrelevant-Support, all tested
models exhibited improved performance. This indi-
cates that all models were able to leverage support
information, even when it was significantly limited.
Variations in model performance were observed due
to differences in model architectures and the vari-
ous backbones employed in the implementation. In
our case, the selected models have variations with the
backbones from VGG-16 to Resnet-101, which may
have different capability to generalize from partial
to full objects. In several experiments (e.g., Center-
Crop(20%), Noise, and Irrelevant-Support), the tested
models struggled to accurately identify the confus-
ing areas in the support images, which hindered the
improvement of the meta-learner’s predictions. The
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
436

part-based and prototype models tested here were
struggling to extract robust prototypes from the sup-
port set with less or incomplete information to learn
about the object class. A new training paradigm, re-
ferred to as BAM with attention, has been proposed.
In this approach, BAM model with an attention mod-
ule is re-trained in conjunction with attention module
and evaluated using highly augmented support im-
ages. Although, it still face challenges in extracting
robust features from the support set, it demonstrates
less confusion and greater capacity for generalization
compared to other models. We believe that our find-
ings can illuminate future investigations into the is-
sues of bias or semantic ambiguity problems.
REFERENCES
Catalano, N. and Matteucci, M. (2024). Few shot seman-
tic segmentation: a review of methodologies, bench-
marks, and open challenges.
Chen, L.-C., Barron, J. T., Papandreou, G., Murphy, K., and
Yuille, A. L. (2016). Semantic image segmentation
with task-specific edge detection using cnns and a dis-
criminatively trained domain transform. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 4545–4554.
Cheng, J., Wang, P.-s., Li, G., Hu, Q.-h., and Lu, H.-
q. (2018). Recent advances in efficient computa-
tion of deep convolutional neural networks. Frontiers
of Information Technology & Electronic Engineering,
19:64–77.
Gregor, K., Danihelka, I., Graves, A., Rezende, D. J., and
Wierstra, D. (2015). Draw: A recurrent neural net-
work for image generation. cite arxiv:1502.04623.
Gu, J., Wang, Z., Kuen, J., Ma, L., Shahroudy, A., Shuai, B.,
Liu, T., Wang, X., Wang, G., Cai, J., et al. (2018). Re-
cent advances in convolutional neural networks. Pat-
tern recognition, 77:354–377.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
Residual Learning for Image Recognition. In Pro-
ceedings of 2016 IEEE Conference on Computer Vi-
sion and Pattern Recognition, CVPR ’16, pages 770–
778. IEEE.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 7132–7141.
Huang, Z., Wang, X., Huang, L., Huang, C., Wei, Y.,
and Liu, W. (2019). Ccnet: Criss-cross attention
for semantic segmentation. In Proceedings of the
IEEE/CVF international conference on computer vi-
sion, pages 603–612.
Janocha, K. and Czarnecki, W. M. (2017). On loss func-
tions for deep neural networks in classification. arXiv
preprint arXiv:1702.05659.
Lang, C., Cheng, G., Tu, B., and Han, J. (2022). Learning
what not to segment: A new perspective on few-shot
segmentation. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 8057–8067.
Li, G., Jampani, V., Sevilla-Lara, L., Sun, D., Kim, J., and
Kim, J. (2021). Adaptive prototype learning and al-
location for few-shot segmentation. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 8334–8343.
Lin, G., Milan, A., Shen, C., and Reid, I. (2017). Refinenet:
Multi-path refinement networks for high-resolution
semantic segmentation. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1925–1934.
Liu, Y., Zhang, X., Zhang, S., and He, X. (2020). Part-
aware prototype network for few-shot semantic seg-
mentation. In European Conference on Computer Vi-
sion, pages 142–158. Springer.
Lu, Z., He, S., Zhu, X., Zhang, L., Song, Y.-Z., and Xiang,
T. (2021). Simpler is better: Few-shot semantic seg-
mentation with classifier weight transformer. In ICCV.
Moradi, R., Berangi, R., and Minaei, B. (2020). A survey
of regularization strategies for deep models. Artificial
Intelligence Review, 53(6):3947–3986.
Rakelly, K., Shelhamer, E., Darrell, T., Efros, A. A.,
and Levine, S. (2018). Few-shot segmentation
propagation with guided networks. arXiv preprint
arXiv:1806.07373.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Medical image computing and
computer-assisted intervention–MICCAI 2015: 18th
international conference, Munich, Germany, October
5-9, 2015, proceedings, part III 18, pages 234–241.
Springer.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2020). Grad-cam: visual
explanations from deep networks via gradient-based
localization. International journal of computer vision,
128:336–359.
Srivastava, R. K., Greff, K., and Schmidhuber, J. (2015).
Training very deep networks. Advances in neural in-
formation processing systems, 28.
Wang, K., Liew, J. H., Zou, Y., Zhou, D., and Feng, J.
(2019a). Panet: Few-shot image semantic segmen-
tation with prototype alignment. In The IEEE Inter-
national Conference on Computer Vision (ICCV).
Wang, X., Zhang, X., Cao, Y., Wang, W., Shen, C., and
Huang, T. (2023a). Seggpt: Segmenting everything in
context.
Wang, Y., Luo, N., and Zhang, T. (2023b). Focus on query:
Adversarial mining transformer for few-shot segmen-
tation. Advances in Neural Information Processing
Systems, 36:31524–31542.
Wang, Y.-X., Ramanan, D., and Hebert, M. (2019b). Meta-
learning to detect rare objects. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 9925–9934.
Woo, S., Park, J., Lee, J., and Kweon, I. S. (2018).
CBAM: convolutional block attention module. CoRR,
abs/1807.06521.
Beyond Data Augmentations: Generalization Abilities of Few-Shot Segmentation Models
437

Xu, K., Ba, J., Kiros, R., Cho, K., Courville, A. C.,
Salakhutdinov, R., Zemel, R. S., and Bengio, Y.
(2015). Show, attend and tell: Neural image
caption generation with visual attention. CoRR,
abs/1502.03044.
Yu, F. and Koltun, V. (2015). Multi-scale context ag-
gregation by dilated convolutions. arXiv preprint
arXiv:1511.07122.
Zhang, X., Wei, Y., Yang, Y., and Huang, T. S. (2020). Sg-
one: Similarity guidance network for one-shot seman-
tic segmentation. IEEE transactions on cybernetics,
50(9):3855–3865.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
438
