
Weak Segmentation and Unsupervised Evaluation: Application to Froth
Flotation Images
Egor Prokopov, Daria Usacheva, Mariia Rumiantceva
a
and Valeria Efimova
b
ITMO University, Kronverkski prospect,49, Saint-Petersburg, Russia
egorprokopov216@gmail.com, obobojk@gmail.com, {marrum, vefimova}@itmo.ru
Keywords:
Froth Flotation, Image Segmentation, Foundation Models, Weakly-Supervised Learning, Unsupervised
Evaluation.
Abstract:
Images featuring clumped texture object types are prevalent across various domains, and accurate analysis of
this data is crucial for numerous industrial applications, including ore flotation—a vital process for material
enrichment. Although computer vision facilitates the automation of such analyses, obtaining annotated data
remains a challenge due to the labor-intensive and time-consuming nature of manual labeling. In this paper,
we propose a universal weak segmentation method adaptable to different clumped texture composite images.
We validate our approach using froth flotation images as a case study, integrating classical watershed tech-
niques with foundational models for weak labeling. Additionally, we explore unsupervised evaluation metrics
that account for highly imbalanced class distributions. Our dataset was tested across several architectures,
with Swin-UNETR demonstrating the highest performance, achieving 89% accuracy and surpassing the same
model tested on other datasets. This approach highlights the potential for effective segmentation with minimal
manual annotations while ensuring generalizability to other domains.
1 INTRODUCTION
Clumped texture composite images present unique
challenges in image segmentation. Clumped textured
data often refers to datasets where values or patterns
tend to cluster together, making it challenging to an-
alyze or interpret due to overlapping features, high
density in specific regions, or non-uniform distribu-
tion. For example, in the industrial field, clumped
textured data can include ore rocks on a conveyor
belt, pores in gypsum boards, pellets in metallurgical
processes, animals clustered in enclosures, and cells
grouped in microscopic images for quality control or
analysis. Froth flotation bubbles represent an excel-
lent example of clumped textured data, as they ex-
hibit dense, irregular clustering patterns that are criti-
cal for analyzing and optimizing separation processes
in mining and mineral processing industries.
Froth flotation is an ore enrichment process that
separates hydrophobic particles from hydrophilic
ones at the interface between phases. The quality of
froth is critical for effective control of the flotation
process, with visual characteristics such as bubble
a
https://orcid.org/0000-0002-0988-2762
b
https://orcid.org/0000-0002-5309-2207
quantity, shape, texture, and color playing significant
roles in determining quality (Gui et al., 2013; Sagha-
toleslam et al., 2004; Subrahmanyam and Forssberg,
1988). While technologists often rely on visual evalu-
ations, these methods can be subjective and inaccurate
due to the dynamic nature of froth.
Computer vision techniques can automate the es-
timation of flotation parameters, but they typically
require large labeled datasets for accurate segmen-
tation—a task that becomes particularly challenging
in the context of clumped froth bubbles, as well as
other similar classes of data. Simple detection meth-
ods that identify centroids fail to provide sufficient
information regarding object boundaries, shapes, or
sizes, limiting their effectiveness across various ap-
plications. Furthermore, manually labeling images
is time-consuming and prohibitively expensive, given
the complexities of froth structures and the diverse na-
ture of other object classes.
To address the high costs of manual labeling for
clumped texture data, we propose a weak segmenta-
tion approach that generates pseudo-labels for froth
flotation images. Using this method as a case study,
we trained several segmentation networks on a cre-
ated dataset, with the aim of estimating froth features
and informing other algorithms, such as those control-
500
Prokopov, E., Usacheva, D., Rumiantceva, M. and Efimova, V.
Weak Segmentation and Unsupervised Evaluation: Application to Froth Flotation Images.
DOI: 10.5220/0013181100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
500-507
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

ling flotation machinery.
To evaluate the stability and robustness of our
weak labeling method, we employed an unsupervised
temporal consistency metric (Varghese et al., 2020)
and introduced a new optical flow similarity metric.
Additionally, we utilized the object recall metric to
quantify segmentation completeness. Our approach
offers a viable alternative for analyzing various data
types beyond froth flotation without the need for ex-
tensive labeled datasets.
2 RELATED WORKS
2.1 Clumped Data and Froth Bubbles
In many industrial applications, data contain numer-
ous small objects that pose significant challenges for
image segmentation due to clustering and homogene-
ity in textures, shapes, or colors. This difficulty is
compounded by the low quality of images, which
are often degraded by noise, blurring, or inconsistent
lighting.
For example, datasets in materials processing in-
dustries may include aggregates, pellets, or stones
(fengkai, 2024; Pellet, 2023; Anton, 2024), where
minimal visual variance and object overlap make seg-
mentation difficult. Flotation bubbles, another form
of clumped texture data, present similar challenges.
Widely studied in industries like mineral processing,
flotation bubbles share similar shapes and textures,
complicating their individual distinction (Moolman
et al., 1995). Manual annotation of these datasets
is difficult, leading to the exploration of various seg-
mentation methods such as the watershed algorithm
(Peng et al., 2021), U-Net (Ju et al., 2022; Zhang
and Xu, 2020), and classification models (Cao et al.,
2021). The watershed algorithm is effective for touch-
ing objects with clear edges, while U-Net captures
both local and global features for complex industrial
images. These challenges highlight the need for in-
novative segmentation approaches, especially where
precise annotations are expensive or time-consuming
(Rumiantceva and Filchenkov, 2022).
2.2 Unsupervised and
Weakly-Supervised Segmentation
Unsupervised segmentation methods aim to over-
come the challenges of manual annotation in clumped
texture data by identifying patterns without labeled
data. Traditional techniques like the watershed algo-
rithm (Peng et al., 2021) are effective but often strug-
gle with high-density object regions and poor image
quality.
Supervised segmentation, particularly with neural
network architectures like UNet (Ronneberger et al.,
2015) and Mask R-CNN (He et al., 2018), has been
successful in handling clumped texture data. UNet’s
ability to capture fine details makes it popular in
industrial applications (Zhong et al., 2023), though
these models require large annotated datasets. The
Segment Anything Model (SAM) (Kirillov et al.,
2023) offers a significant advancement by leveraging
a promptable segmentation framework, excelling in
zero-shot transfer to new tasks, making it ideal for in-
dustries with frequent segmentation needs.
Figure 1: Scheme of the proposed weak segmentation
method.
2.3 Metrics
Evaluating weakly-supervised methods is challenging
due to the lack of labeled datasets, as conventional
metrics like Intersection over Union (IoU) or pixel-
wise accuracy require ground truth data. To overcome
this, alternative metrics must be used. One such met-
ric is temporal consistency (Varghese et al., 2020),
which assesses segmentation stability across consecu-
tive frames or images. It evaluates how consistent the
segmentation results are when objects undergo slight
variations in position, scale, or orientation, making it
useful for video data or time-sequenced images.
Temporal consistency provides an indirect mea-
sure of a model’s reliability, rewarding methods that
maintain stable segmentations. Other metrics, such as
object coherence and size regularity, can also offer ap-
proximate evaluations by ensuring segmented objects
Weak Segmentation and Unsupervised Evaluation: Application to Froth Flotation Images
501
maintain logical shapes and proportions. These ap-
proaches enable performance assessment in weakly-
supervised settings without the need for ground truth.
3 METHOD
In this section, we describe our method for weak la-
beling of froth images, combining foundation mod-
els with classical computer vision techniques. Pre-
vious works have shown that segmenting clumped,
clumped texture objects like froth bubbles is challeng-
ing, particularly due to poor image quality and the
need for detailed annotations. Traditional methods,
such as watershed and U-Net, require extensive la-
beled datasets, which are difficult to obtain. To ad-
dress this, we propose a hybrid approach. We use
SAM to extract big and medium size bubbles with
guidance from YOLOv8 (Jocher et al., 2023). To
segment small bubbles, we use watershed algorithm
with morphological transformations. Finally, we ap-
ply post processing steps (Fig. 1). This allows us
to minimize manual annotation while achieving ef-
fective segmentation through weak labeling and un-
supervised learning.
3.1 Watershed Approach
First, the input image undergoes preprocessing to cor-
rect uneven lighting, using the Single-Scale Retinex
(SSR) (Land and McCann, 1971) algorithm for nor-
malization (Fig. 2.. Subsequently, bilateral filtering
smooths the image while preserving the histogram’s
structure. Without SSR, the histogram would be
skewed toward darker values, complicating further
processing. Morphological transformations are then
applied to enhance contrast between highlights and
bubble regions, adjusting the histogram to facilitate
optimal threshold selection for segmentation.
Figure 2: Histogram of the image after applying steps of the
preprocessing.
As a result, we have successfully extracted the
bubble markers. These markers enable the assess-
ment of relative size, velocity, and quantity of the
bubbles. For analytical purposes, we categorize the
bubbles into two groups: small bubbles, and medium
to large bubbles.
Figure 3: The first column is the original image, the second
one corresponds to extracted markers of small sized bub-
bles, the third one is big and medium sized bubbles mark-
ers, the last one is the watershed output.
Based on these highlighted regions, we generate
the seed areas for the watershed algorithm. A com-
bination of erosion and dilation, with varying kernel
sizes, is applied to preprocess the image. The result-
ing processed image is then used as input for the wa-
tershed algorithm, producing contours and segmenta-
tion masks. This approach proves effective in gen-
erating masks for small-sized bubbles, although the
results may be less precise. However, due to the sub-
stantial variability in the shapes of medium and large
bubbles, this method is not suitable for accurately seg-
menting these categories(Fig. 3, Fig. 4).
Figure 4: The proposed method of watershed processing
does not segment big bubbles.
3.2 Foundation Model Approach
To segment medium and large bubbles in flotation
froth, we used the Segment Anything Model (SAM)
(Kirillov et al., 2023). As a foundation model, SAM
does not require additional training to label the data.
However, using SAM without guidance does not yield
satisfactory results.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
502
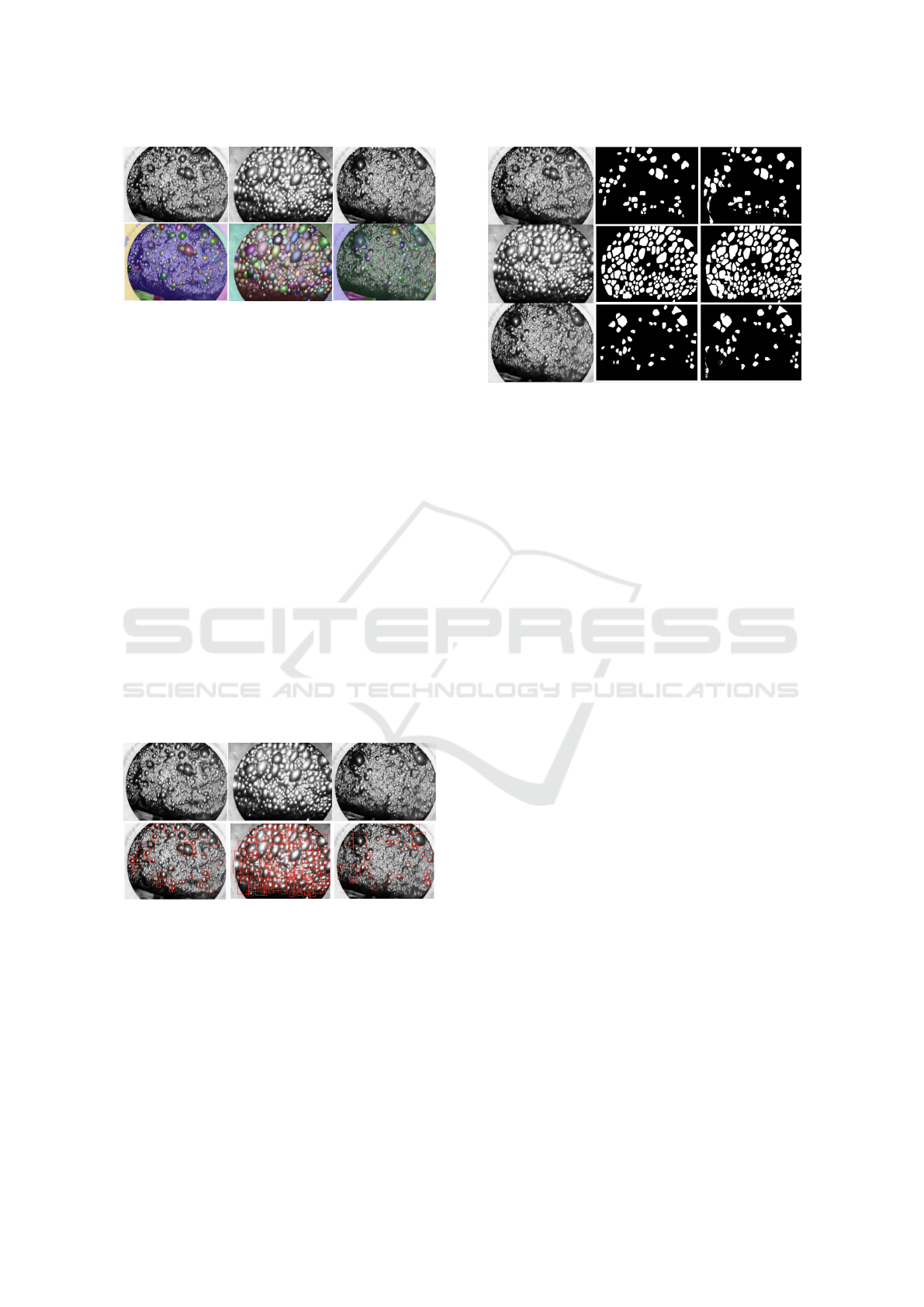
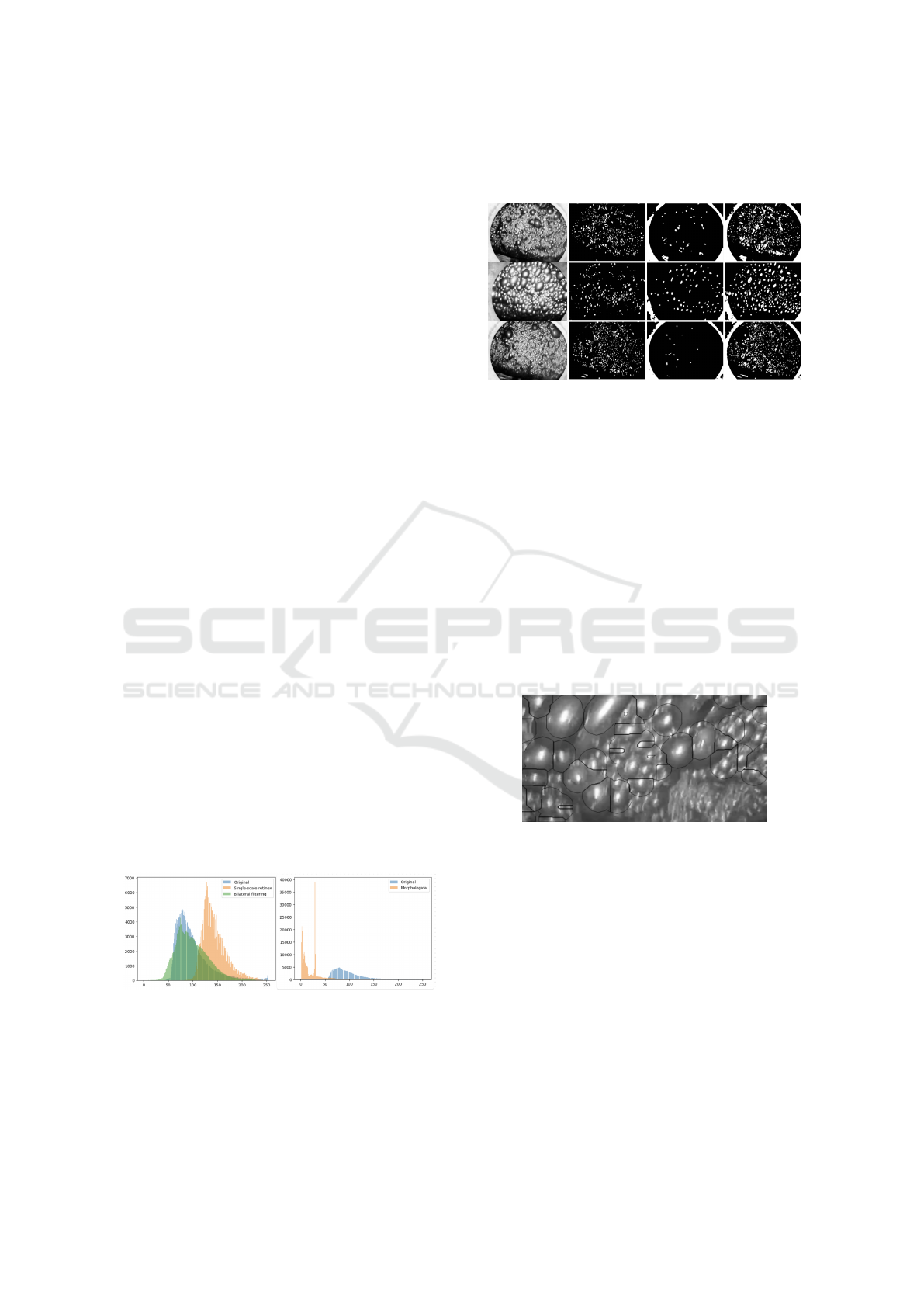
Figure 5: Output of SAM without any prompt guidance.
The first row is the input image, the second is the outputs of
the model.
As shown in Fig. 5, SAM misses most of the
bubbles and incorrectly segments objects unrelated to
froth flotation. To achieve the desired results, guid-
ance is necessary. SAM supports sparse prompts
(point, bounding box, and text) as well as dense
prompts (mask). Since our dataset lacks labeled
masks, dense prompts could not be used. Further-
more, text prompts failed to address the issues ob-
served with unguided SAM. Thus, we considered two
guidance approaches: bounding box prompts and a
combination of bounding boxes and point prompts.
To detect bubbles in flotation images and generate
bounding boxes, we employed the YOLOv8 detection
model (Fig. 6). This model was trained on a small
hand-labeled dataset of 70 images. Notably, precise
labeling was unnecessary for this task, as some small
bubbles are difficult to recognize even for experts, es-
pecially when image quality is poor. These bounding
boxes served as guidance for SAM to enhance seg-
mentation accuracy.
Figure 6: Output of YOLOv8 detection model for medium
and large bubbles. The first row is the original image, the
second row is the visualization of the predicted bounding
boxes.
We evaluated two approaches for prompting
SAM. The first approach used only bounding boxes as
prompts for segmentation, while the second approach
added point prompts derived from the centers of each
bounding box. Among these, using only bounding
box prompts produced cleaner and less noisy masks,
as shown in Fig. 7.
Figure 7: Output of SAM without point prompt and with
it. The first column is raw data, the second one is output of
the model using only bounding boxes, the third one is with
additional point guidance.
3.3 Post-Processing
At this step of the proposed method, we post-process
the results obtained from the previous steps to gener-
ate a single comprehensive mask. Initially, we utilize
a set of masks for each bubble derived from the Seg-
ment Anything model, which are then narrowed by a
specific factor—determined to be 0.2 through experi-
mentation. These individual masks are subsequently
combined into a unified mask. The output from the
watershed processing is then incorporated, resulting
in the final segmentation label (Fig. 8).
4 EXPERIMENTS
In this section, we present the results of training seg-
mentation neural networks on the dataset labeled us-
ing our method. We compare the robustness and sta-
bility of the masks generated by the watershed algo-
rithm, our approach, and the discussed neural net-
works. Additionally, we introduce a novel metric to
evaluate the stability of segmentation across contigu-
ous frames, which is based on the similarity between
the optical flows of the frames and their correspond-
ing masks.
4.1 Dataset Development
To develop the dataset, we utilized footage from var-
ious flotation machines, selecting every tenth frame
from the provided videos. During preprocessing,
we manually removed duplicate frames and excluded
low-quality images that contained codec errors and ar-
tifacts. Each video was labeled independently, and the
resulting labeled frames were subsequently merged
Weak Segmentation and Unsupervised Evaluation: Application to Froth Flotation Images
503
into training, validation, and test sets without shuf-
fling frames from different videos. Using this method,
we generated a total of approximately 15,000 labeled
images.
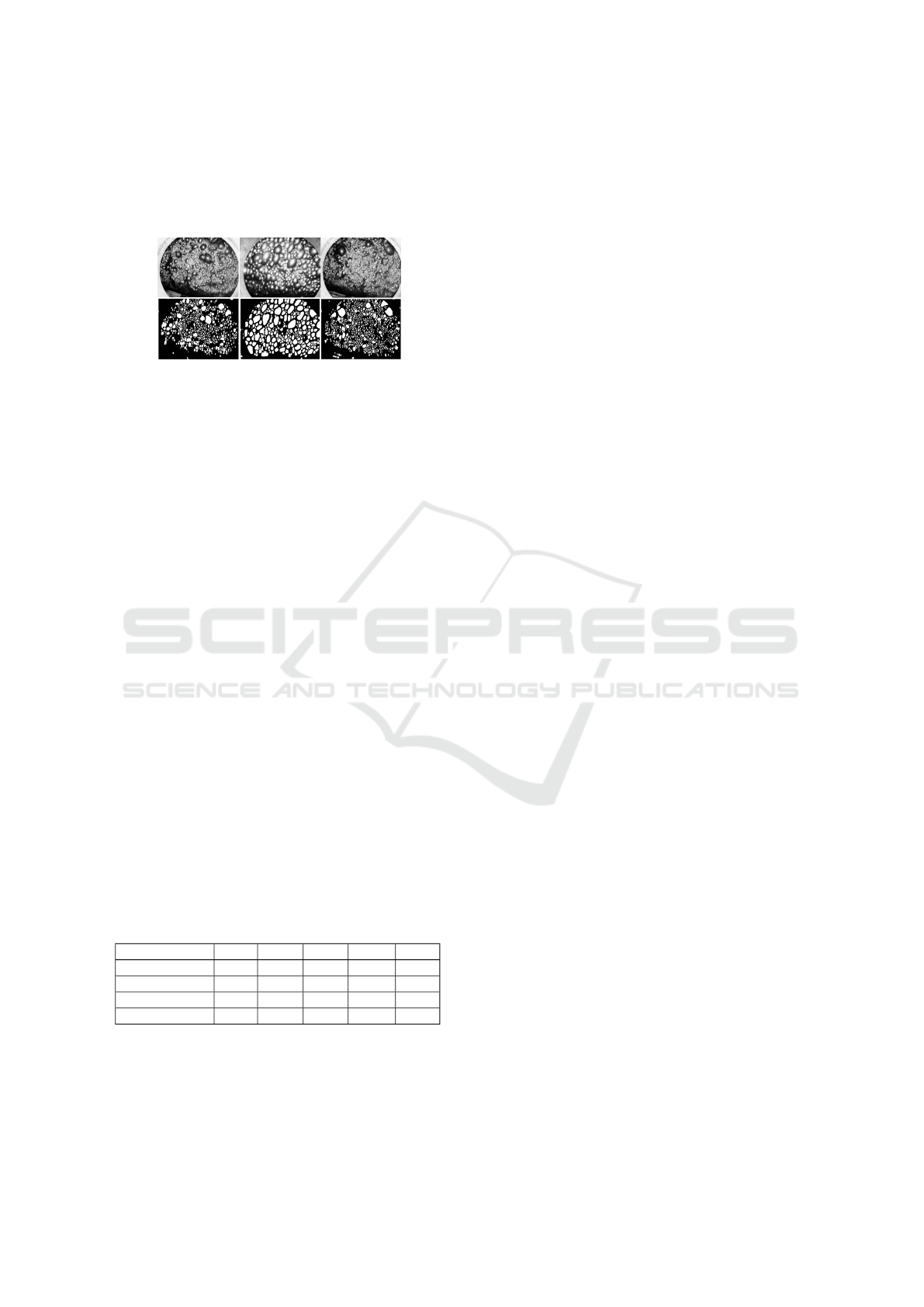
Figure 8: Result of proposed method. The first row is the
input image, the second row is the result of the proposed
algorithm.
4.2 Model Training
We utilized our dataset to train several segmentation
models, including HRNet, DeepLabv3, Segformer,
and Swin with UNETR decoder. The rationale be-
hind the selection of these models was to evaluate the
learning outcomes of various contemporary architec-
tures:
• The HRNet (Wang et al., 2020) architecture uti-
lizes features at various semantic levels, known
for delivering informative and accurate segmenta-
tion results.
• The DeepLabv3 (Chen et al., 2018) model em-
ploys sparse convolutions with varying kernel
sizes to extract features across different semantic
levels, making it lightweight and suitable for real-
time processing.
• The Segformer (Xie et al., 2021) is a vision
transformer model that enhances generalization
through its attention mechanism, requiring sub-
stantial data for effective training.
• Swin-UNETR (Hatamizadeh et al., 2022) adapts
the classic UNet architecture with residual con-
nections in the decoder, using Swin Transformer
(Liu et al., 2021) as the encoder.
Table 1: Supervised metrics table.
Model IoU Dice Acc. Prec. Rec.
HRNet 0.40 0.58 0.88 0.64 0.52
DeepLabv3 0.38 0.55 0.85 0.70 0.45
SegFormer 0.38 0.56 0.86 0.68 0.49
Swin-UNETR 0.48 0.63 0.89 0.86 0.51
Prior to training, we preprocessed the input im-
ages utilizing the CLAHE algorithm to ensure con-
sistent lighting (Mishra, 2021). Additionally, we ap-
plied a variety of data augmentation techniques, in-
cluding random flipping, cropping, translation, scal-
ing, and rotation. To mitigate data leakage, the dataset
was initially partitioned into training, validation, and
test subsets according to the source videos. Conse-
quently, we assessed the performance of the trained
models on the test dataset. As presented in Table 1,
Swin-UNETR exhibited the best overall performance,
achieving the highest Intersection over Union (IoU),
Dice coefficient, accuracy, and precision. Although
HRNet demonstrated a marginally better recall, the
balanced performance of Swin-UNETR positions it as
the most effective model for our segmentation task. It
is noteworthy that the model should avoid overfitting
to the weak labels, which accounts for the relatively
modest IoU and Dice values observed.
4.3 Metrics
To evaluate stability and robustness of froth images
segmentation, we used temporal consistency metric.
We also introduce optical flow similarity metric to
avoid image warping step used in temporal consis-
tency.
Considering that neither temporal consistency nor
optical flow similarity metrics directly represent the
number of objects estimated, we decided to include
object recall as one of our metrics. Although recall is
a supervised metric, we found a way to make it inde-
pendent of labeled data by using watershed markers
to count objects.
We compared the resulting masks from the water-
shed algorithm and the proposed method.
4.3.1 Temporal Consistency
Most supervised metrics assess segmentation accu-
racy but not its stability between contiguous frames.
Additionally, such metrics require ground truth data,
making them unsuitable for comparing weakly la-
beled segmentation algorithms. In (Varghese et al.,
2020), an unsupervised method was introduced to
estimate temporal consistency between contiguous
frames using optical flow. The original method relied
on Farneb
¨
ack’s algorithm (Farneb
¨
ack, 2003), but clas-
sical optical flow methods perform poorly on clumped
texture data. Instead, we used the RAFT model (Teed
and Deng, 2020), a robust neural network-based ap-
proach implemented in PyTorch (Paszke et al., 2019).
Our analysis revealed that the temporal consis-
tency metric is not well-suited for evaluating seg-
mentation stability on clumped texture data. This is
due to significant differences on image borders be-
tween the current frame mask and the transformed
previous mask (Fig. 9), strongly affecting the IoU
metric. These differences arise from froth motion
and the appearance/disappearance of bubbles between
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
504
frames. As the original metric does not account for
such changes, we modified it for our data by omitting
the mask transformation step.
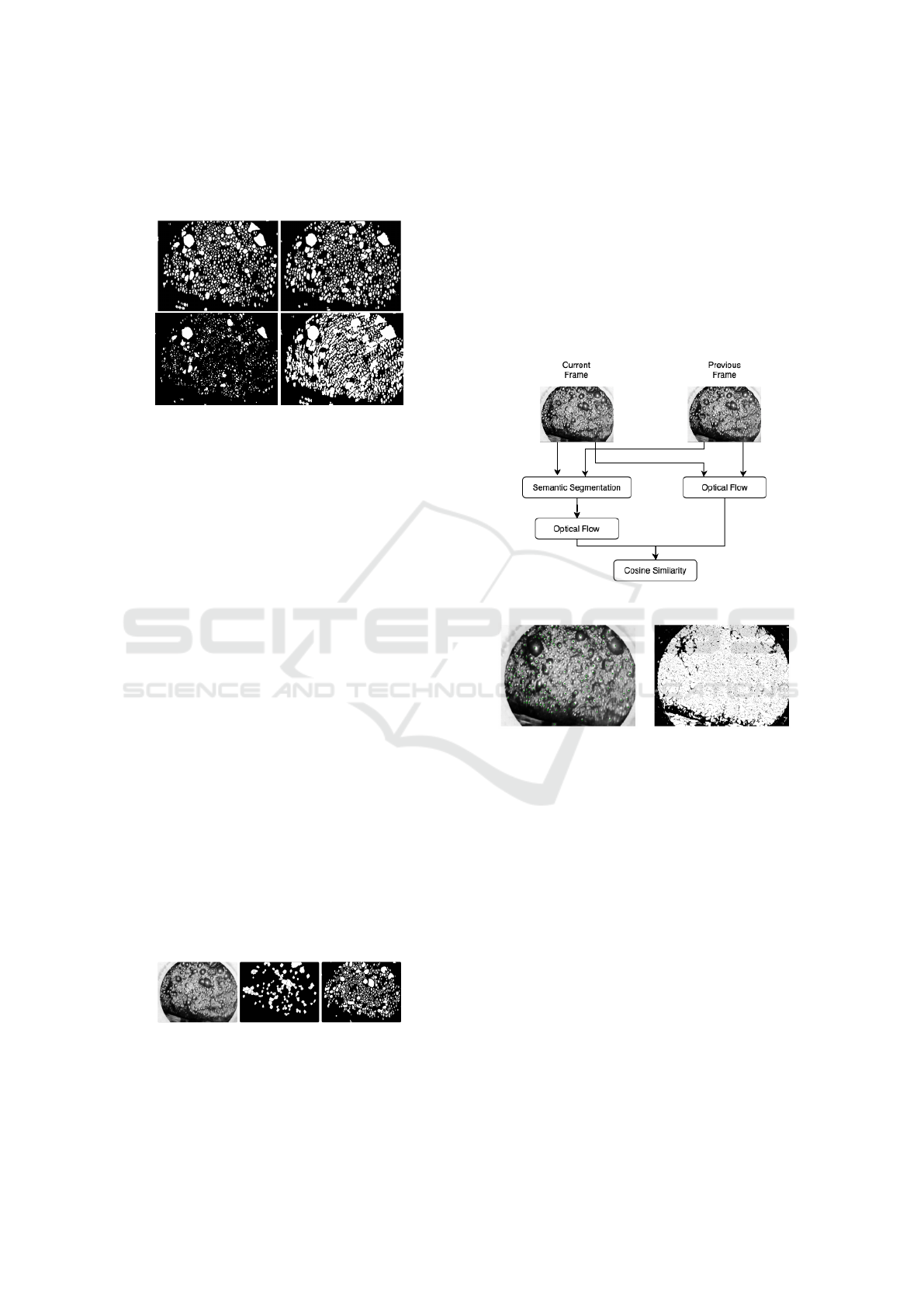
Figure 9: Comparison of the current frame mask (top-left),
the transformed mask of the previous frame (top-right), in-
tersection of the masks (bottom-left) and the union of the
masks (bottom-right).
4.3.2 Optical Flow Similarity
To address the issue of instability in segmentation
evaluation, we propose calculating the mean cosine
similarity between the optical flow vectors of contigu-
ous frames and their corresponding masks (Fig. 11),
instead of using the intersection over union metric be-
tween the current frame mask and the transformed
previous frame mask.
The rationale is simple: if segmentation is sta-
ble and robust, the mask’s optical flow vectors should
align with the frame’s optical flow vectors. This ap-
proach minimizes the influence of optical flow inac-
curacies on the final metric.
4.3.3 Object Recall
In comparing the results of our proposed method with
the watershed segmentation approach (Fig. 10), we
noted a marked discrepancy in the number of detected
objects between the two techniques. To quantitatively
assess this difference, we opted to utilize the recall
metric. However, given that recall is inherently a su-
pervised metric, we adapted it for unsupervised evalu-
ation by anchoring our metric to the number of objects
identified by an alternative algorithm.
Figure 10: Comparison of the watershed and the modified
watershed.
Initially, YOLOv8 was considered to be used for
object counting. As labelling dataset for object de-
tection is far less labour intensive, we created dataset
consisting of 20 images for fine-tuning the model.
However, the results for estimating the number of ob-
jects were unsuitable as it missed a significant number
of small bubbles (Fig. 12a). During training, it was
observed that the centers of bounding boxes were lo-
cated at the bubble glare spots. Given that the markers
obtained from image preprocessing for the watershed
algorithm effectively highlight the glare spots of all
bubbles, particularly the small ones, we decided to
use these markers for our metric.
Figure 11: Scheme of the optical flow similarity metric.
(a) Found objects (b) Dynamic mask
Figure 12: The resulting bounding boxes centers are marked
with green dots and the dynamic mask of changes.
The centers of each marker are calculated with a
focus on those involved in the flotation process, which
is inherently dynamic. To compute the ”static” com-
ponent of the image, two contiguous frames are con-
verted to grayscale, and the absolute difference be-
tween them is computed. Subsequently, static regions
are filtered out using a very low threshold of 3 out of
255. This process results in an array where a value
of 0 represents the static portion and a value of 1 de-
notes the dynamic component, which constitutes the
rescaled mask (Fig. 12b). To eliminate false mark-
ers located in regions not exhibiting the flotation pro-
cess, the markers are logically multiplied by the ob-
tained mask. The total number of remaining markers
represents T P + FN. The centers of the markers are
logically multiplied by the segmentation masks ob-
tained after processing with the aforementioned meth-
ods. The resulting number of markers is considered
Weak Segmentation and Unsupervised Evaluation: Application to Froth Flotation Images
505
T P, and Recall is calculated as
T P
T P+FN
.
Table 2: Unsupervised metrics table.
Method Temp.
Cons.
Opt. Flow
Sim.
Obj. Rec.
Watershed 0.41 0.23 0.52
Ours 0.30 0.27 0.85
5 DISCUSSION
The proposed weak segmentation method demon-
strates strong performance as measured by the opti-
cal flow similarity metric; however, it exhibits some
instability that may hinder its robustness. While it
outperforms the previous watershed segmentation ap-
proach with manual mask corrections by identify-
ing more images, its occasional instability reduces
these advantages. Improving the method’s consis-
tency would enhance its effectiveness compared to
traditional techniques.
The quality of the original data significantly influ-
ences labeling accuracy. During analysis, several is-
sues were identified: poor resolution, artifacts that in-
terfere with segmentation, and irrelevant objects com-
plicating the process. Our results revealed key inaccu-
racies, including a tendency to over-segment certain
regions and overlook smaller objects, such as bubbles.
Furthermore, challenges arise when using unsu-
pervised metrics. The temporal consistency metric,
which compares transformed masks via the Intersec-
tion over Union (IoU), may not effectively apply to
clumped texture data with numerous objects. Al-
though the optical flow similarity metric avoids mask
transformation, it remains sensitive to original data
quality. Additionally, while our object recall metric
successfully detects most objects, it does not guaran-
tee comprehensive detection, rendering it an approxi-
mation for evaluation purposes.
To address these issues, generating synthetic
clumped texture data presents a potential solution,
aiming to alleviate challenges posed by low-quality
data and reduce the need for extensive annotation. We
propose that a synthetic dataset could serve as reliable
ground truth for training neural networks. Moreover,
combining weakly labeled masks produced by our
method with synthetic data from three-dimensional
modeling techniques could enhance training by pro-
viding realistic and diverse examples, thereby im-
proving the robustness and accuracy of segmentation
models.
6 CONCLUSION
In this work, we present a weak segmentation ap-
proach for froth flotation images, tackling key chal-
lenges in mineral processing. Our method com-
bines classical computer vision techniques with ad-
vanced neural network architectures, specifically the
Segment Anything Model (SAM) and the YOLOv8
model for bubble detection. This hybrid approach en-
hances the accuracy and efficiency of object identifi-
cation in highly clumped froth images, which are tra-
ditionally difficult to segment.
A major contribution of our work is the develop-
ment of a more precise weak labeling method that eas-
ily adapts to various types of clumped texture data,
along with the creation of a dataset containing 15,000
images. This approach reduces the labor-intensive
manual labeling process by minimizing the need for
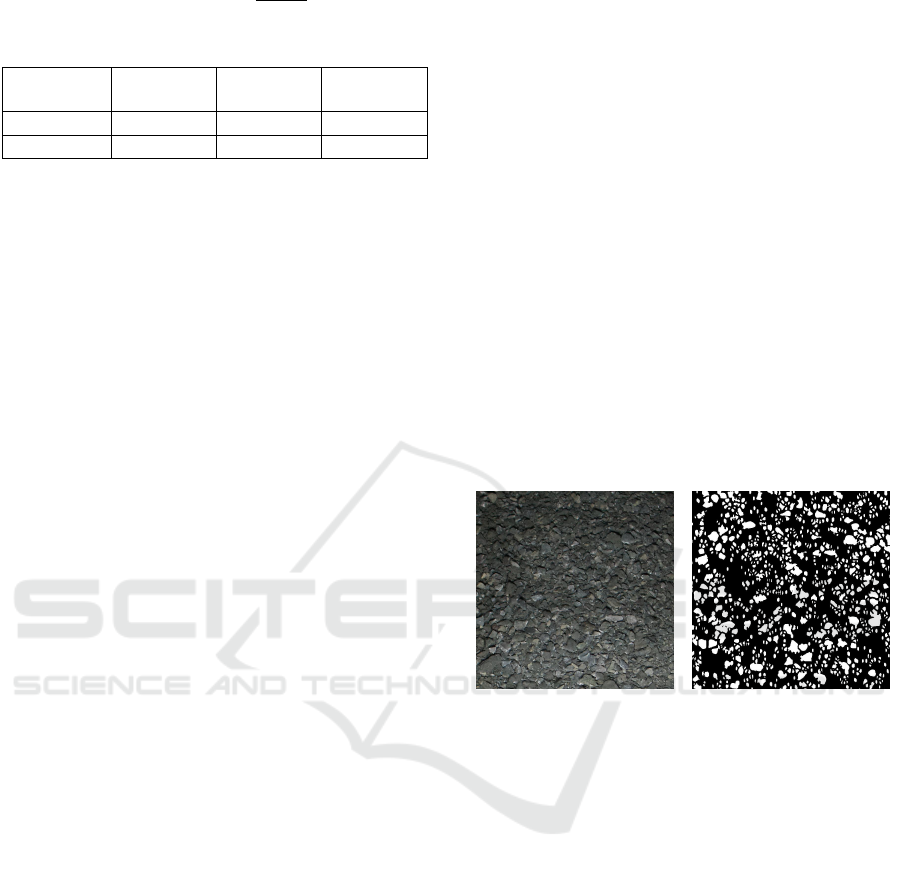
extensive annotated datasets. Notably, we have suc-
cessfully tested the method in another domain, specif-
ically on stones.
Figure 13: Image and mask for stones.
We also introduce unsupervised evaluation met-
rics for assessing the stability and robustness of seg-
mentation through counting, utilizing temporal con-
sistency and optical flow similarity metrics. While
our method shows promise, we acknowledge its lim-
itations related to instability and dependence on the
original data quality. Future work will focus on gen-
erating synthetic clumped texture data to establish a
more reliable ground truth for training neural net-
works, further enhancing the method’s applicability
in real-world scenarios. Notably, we have success-
fully validated this method on stone datasets, yielding
positive results.
ACKNOWLEDGEMENTS
The research was supported by the ITMO University,
project 623097 ”Development of libraries containing
perspective machine learning methods”
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
506

REFERENCES
Anton (2024). Rocks dataset. https://universe.roboflow.
com/anton-yjhge/rocks-bhdzr. visited on 2024-10-22.
Cao, W., Wang, R., Fan, M., Fu, X., Wang, H., and Wang,
Y. (2021). A new froth image classification method
based on the mrmr-ssgmm hybrid model for recogni-
tion of reagent dosage condition in the coal flotation
process. Applied Intelligence, 52(1):732–752. [On-
line; accessed 2023-10-15].
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sepa-
rable convolution for semantic image segmentation.
Farneb
¨
ack, G. (2003). Two-frame motion estimation based
on polynomial expansion.
fengkai (2024). coal2.1 dataset. https://universe.roboflow.
com/fengkai-ncemj/coal2.1. visited on 2024-10-22.
Gui, W., Liu, J., Yang, C., Chen, N., and Liao, X. (2013).
Color co-occurrence matrix based froth image texture
extraction for mineral flotation. Minerals Engineer-
ing, s 46–47:60–67.
Hatamizadeh, A., Nath, V., Tang, Y., Yang, D., Roth, H.,
and Xu, D. (2022). Swin unetr: Swin transformers for
semantic segmentation of brain tumors in mri images.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2018).
Mask r-cnn.
Jocher, G., Chaurasia, A., and Qiu, J. (2023). Ultralytics
YOLO.
Ju, Y., Wu, L., Li, M., Xiao, Q., and Wang, H. (2022). A
novel hybrid model for flow image segmentation and
bubble pattern extraction. Measurement, 192:110861.
[Online; accessed 2023-10-15].
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W.-Y., Doll
´
ar, P., and Girshick, R. (2023). Seg-
ment anything.
Land, E. H. and McCann, J. J. (1971). Lightness and retinex
theory. Journal of the Optical Society of America,
61(1):1–11.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin, S.,
and Guo, B. (2021). Swin transformer: Hierarchical
vision transformer using shifted windows.
Mishra, A. (2021). Contrast limited adaptive histogram
equalization (clahe) approach for enhancement of the
microstructures of friction stir welded joints.
Moolman, D. W., Aldrich, C., van Deventer, J., and Brad-
shaw, D. (1995). The interpretation of flotation froth
surfaces by using digital image analysis and neural
networks. Chemical Engineering Science, 50:3501–
3513.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances
in neural information processing systems, 32:8024–
8035.
Pellet (2023). Ensemble pellet dataset.
https://universe.roboflow.com/pellet-
xbnmm/ensemble-pellet. visited on 2024-10-22.
Peng, C., Liu, Y., Gui, W., Tang, Z., and Chen, Q. (2021).
Bubble image segmentation based on a novel water-
shed algorithm with an optimized mark and edge con-
straint. IEEE Transactions on Instrumentation and
Measurement, PP:1–1.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation.
Rumiantceva, M. and Filchenkov, A. (2022). Deep learn-
ing and pseudo-labeling for ore granulometry. Pro-
cedia Computer Science, 212:387–396. 11th Interna-
tional Young Scientist Conference on Computational
Science.
Saghatoleslam, N., Karimi, H., Rahimi, R., and Shirazi, H.
(2004). . . . of texture and color froth characteristics
for evaluation of flotation performance in sarchesh-
meh copper pilot plant using image analysis and neu-
ral . . . . IJE Transactions B, 17.
Subrahmanyam, T. V. S. and Forssberg, E. (1988). Froth
stability, particle entrainment and drainage in flotation
: a review. International Journal of Mineral Process-
ing, 23:33–53.
Teed, Z. and Deng, J. (2020). Raft: Recurrent all-pairs field
transforms for optical flow.
Varghese, S., Bayzidi, Y., B
¨
ar, A., Kapoor, N., Lahiri, S.,
Schneider, J. D., Schmidt, N., Schlicht, P., H
¨
uger, F.,
and Fingscheidt, T. (2020). Unsupervised temporal
consistency metric for video segmentation in highly-
automated driving. In 2020 IEEE/CVF Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 1369–1378.
Wang, J., Sun, K., Cheng, T., Jiang, B., Deng, C., Zhao,
Y., Liu, D., Mu, Y., Tan, M., Wang, X., Liu, W., and
Xiao, B. (2020). Deep high-resolution representation
learning for visual recognition.
Xie, E., Wang, W., Yu, Z., Anandkumar, A., Alvarez, J. M.,
and Luo, P. (2021). Segformer: Simple and efficient
design for semantic segmentation with transformers.
Zhang, L. and Xu, D. (2020). Flotation bubble size dis-
tribution detection based on semantic segmentation.
IFAC-PapersOnLine, 53(2):11842–11847. [Online;
accessed 2023-10-15].
Zhong, Y., Tang, Z., Zhang, H., Xie, Y., and Gao, X.
(2023). A froth image segmentation method via
generative adversarial networks with multi-scale self-
attention mechanism. Multimedia Tools and Applica-
tions, 83:1–20.
Weak Segmentation and Unsupervised Evaluation: Application to Froth Flotation Images
507
