
Minimizing Energy Cost in a Job-Shop Scheduling Problem Under ToU
Pricing: A New Method Based on a Period-Indexed MILP
Marouane Felloussi
a
, Xavier Delorme
b
and Paolo Gianessi
c
Mines Saint-Etienne, Univ. Clermont Auvergne, INP Clermont Auvergne, CNRS, UMR 6158 LIMOS, F-42023
Saint-Etienne, France
Keywords:
Energy-Efficient Production Systems, ToU Pricing, Job-Shop Scheduling, Exact Method, Mixed-Integer
Linear Programming, Valid Inequalities.
Abstract:
This work addresses the job-shop scheduling problem under energy considerations, specifically focusing on
minimizing total energy costs within a Time-of-Use pricing framework, denoted as J
m
||T EC. We propose a
period-indexed Mixed-Integer Linear Programming formulation, which proves advantageous due to its smaller
model size compared to traditional time-indexed approaches. Initial studies highlight that while our model can
rapidly find feasible solutions, it struggles with weak linear relaxations. Different families of valid inequalities
are thus considered to improve the obtained lower bounds. In order to evaluate and compare the impact of the
proposed valid inequalities, computational experiments are presented and numerical results are discussed and
analyzed.
1 INTRODUCTION
The rising demand for energy, volatile prices, and
global warming concerns have heightened the focus
on energy efficiency. The industrial sector, responsi-
ble for over half of global end-use energy consump-
tion, is projected to see electricity use grow from 22%
in 2021 to 46% by 2050 due to process electrification
(International Energy Agency, 2023). Manufacturing
systems, as key contributors to industrial energy use,
must meet the rising demand for goods while address-
ing their energy-intensive nature. Enhancing energy
efficiency in this sector is crucial for sustainability.
Energy cost minimization provides a strategic means
of improving efficiency by leveraging Time-of-Use
(ToU) pricing, where varying per-unit energy prices
incentivize production during off-peak periods. Such
scheduling not only reduces costs and grid strain, but
also lowers greenhouse gas emissions.
As a relevant problem in manufacturing systems,
the Job-Shop Scheduling Problem (JSSP) stands out
as one of the most complex and studied problems
in operations research. The N P -hard (Garey et al.,
1976) problem consists of operations that must be
a
https://orcid.org/0009-0005-1351-5403
b
https://orcid.org/0000-0002-9465-1255
c
https://orcid.org/0000-0001-5457-3689
contiguously processed on dedicated machines and in
a predefined order. Each operation has a specific ma-
chine that it needs to be processed on and only one
operation in a job can be processed at a given time.
The problem then consists in sequencing the opera-
tions on machines in order to minimize the makespan,
i.e. the last completion time.
Incorporating energy considerations into the JSSP
adds complexity, even with simplified assumptions
like constant machine power usage. For instance,
when energy prices follow a ToU pricing scheme,
minimizing energy costs without worsening produc-
tion objectives results in a scheduling problem that
must optimize both production and energy efficiency.
A key combinatorial challenge in energy-efficient
scheduling is that incorporating non-regular crite-
ria like time-dependent energy pricing requires ex-
plicit timing decisions (Dauz
`
ere-P
´
er
`
es et al., 2024).
To model time-dependent energy costs, time-indexed
(TI) formulations are often preferred to disjunctive
(D) ones (see, e.g. Masmoudi et al. 2019). While TI
formulations provide strong dual bounds, they often
lead to large Mixed-Integer Linear Programs (MILP).
In the most common case where ToU profiles are
piecewise constant, period-indexed formulations can
be an alternative modeling approach. These involve
associating a variable with whether the processing of
an operation occurs during one of the ToU periods.
320
Felloussi, M., Delorme, X. and Gianessi, P.
Minimizing Energy Cost in a Job-Shop Scheduling Problem Under ToU Pricing: A New Method Based on a Period-Indexed MILP.
DOI: 10.5220/0013181200003893
In Proceedings of the 14th International Conference on Operations Research and Enterprise Systems (ICORES 2025), pages 320-327
ISBN: 978-989-758-732-0; ISSN: 2184-4372
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

In this paper, we address the job-shop scheduling
problem with minimization of the total energy costs
subject to a ToU pricing scheme. To do so, we pro-
pose a novel period-indexed MILP, where timing de-
cisions are indexed on ToU periods. Valid inequal-
ities and variable-fixing relations are introduced and
discussed to strengthen the linear relaxations.
The remainder of this paper is structured as fol-
lows: Section 2 reviews the relevant literature. Sec-
tion 3 introduces key notations, presents the proposed
mathematical formulation and discusses the valid in-
equalities used to enhance it. Computational experi-
ments are detailed and analyzed in Section 4. We con-
clude the paper with remarks and potential research
directions in Section 5.
2 SHORT LITERATURE REVIEW
Energy cost minimization under ToU pricing has been
explored in various scheduling settings. For parallel
machines, Gaggero et al. (2023) present a MILP with
symmetry-breaking properties and a heuristic for a
multi-objective problem addressing both energy cost
and makespan. Further, Tian and Zheng (2024) tackle
a single machine batch scheduling problem, develop-
ing a set partitioning formulation and novel branching
rules for their branch-and-price. In the shop schedul-
ing context, Park and Ham (2022) develop a Con-
straint Programming (CP) model for a flexible job-
shop problem considering machine states, while Jiang
and Wang (2020) introduce a time-indexed MILP for
the permutation flow-shop. Some research focuses
on minimizing total energy cost subject to opera-
tional constraints. Masmoudi et al. (2019) develop
disjunctive and time-indexed formulations, as well
as a matheuristic for the job-shop scheduling under
makespan and power limits. Bley and Linß (2022)
approach the job-shop with machine states and re-
lease/due dates with a branch-and-bound algorithm
based on a time-indexed formulation, enhanced by
preprocessing and propagation techniques.
To conclude this brief literature review, we high-
light some of the works using a period-based ap-
proach. In the machine scheduling environment,
Cheng et al. (2016) examine a single machine batch
scheduling problem minimizing total energy cost,
comparing time-indexed and period-indexed formu-
lations. As for unrelated parallel machines, Che et al.
(2017) propose a model to minimize total energy
cost, enhanced with valid inequalities and a two-stage
heuristic. For the same problem, Ding et al. (2016)
present a period-indexed formulation and a heuris-
tic based on a Dantzig-Wolf Reformulation (DWR).
On the other hand, there is limited research on shop
scheduling with period-indexed formulations. To the
best of our knowledge, Ho et al. (2022) is the only
work to date featuring this modeling choice, featuring
a Logic-Based Benders Decomposition (LBBD) for
the two-machines permutation flow-shop problem.
Table 1 formally classifies the different discussed
problem settings, using the 3-field notation proposed
in Graham et al. (1977) to characterize the general
setting of these problems. Additionally, φ
max
will de-
note the contracted power limit, on/off the machines
regulation via the “on/off” mechanism, and T EC the
total energy cost of a schedule. We also adopt the
naming conventions of Pinedo (2016) for schedul-
ing problems. For MILP approaches, we specify the
nature of the formulation using the previously intro-
duced acronyms D, TI, and PI.
3 PROBLEM DESCRIPTION AND
FORMULATION
3.1 Formal Problem Definition
We consider a shop floor with a set M of machines
and a set J of jobs to be performed over a time hori-
zon C . Each job j ∈ J must be executed on a pre-
defined ordered subset of machines M
j
⊆ M , giving
rise to as many operations subject to precedence con-
straints. Without loss of generality, we consider in
this study that every job executes over all machines:
an operation can hence be denoted as ( j,m) ∈ O
with O
:
= J × M denoting the set of operations, and
|M
j
| = |M |,∀ j ∈ J . For each j ∈ J , we denote
( j,m) ≺ ( j,m
′
) if operation ( j,m) must be processed
before operation ( j,m
′
), i.e. if in the ordered subset
M
j
, m precedes m
′
.
The processing time p
j,m
of an operation is known
and is deterministic. Each machine m has a constant
nominal power ϕ
m
, therefore each operation ( j,m)
has energy consumption of ϕ
m
p
j,m
. Energy usage is
subject to a ToU pricing, hence the time horizon C is
divided into a set K of periods, each period k ∈ K
featuring a duration l
k
and a price per energy unit c
k
.
Let t
k
denote the start date of period k, then t
1
= 0,
t
k+1
−t
k
= l
k
,∀k ∈ J1,|K |K, t
|K +1|
= C.
In addition to being precedence-compliant, the
processing of operations must be non-preemptive (i.e.
uninterrupted) and avoid overlapping on the same ma-
chine. The goal is to find a feasible schedule of all op-
erations within the time horizon C, such that the cost
of the energy used to process them, determined by the
ToU fees, is minimized. Using the three-field notation
Minimizing Energy Cost in a Job-Shop Scheduling Problem Under ToU Pricing: A New Method Based on a Period-Indexed MILP
321
Table 1: A summary of the cited works.
Problem class Article Problem
Solution
Approach
job-shop
scheduling
(Bley and Linß, 2022) Jm|on/off, r
j
,d
j
|T EC MILP (TI), B&B
(Masmoudi et al., 2019) Jm|φ
max
|T EC MILP (D,TI), MH
flexible job-shop
scheduling
(Park and Ham, 2022) FJm|on/off|C
max
,T EC MILP (TI), CP
(Jiang and Wang, 2020) FJm||C
max
,T EC MILP (TI), H
flow-shop scheduling (Ho et al., 2022) F2|prmu,on/off |TEC MILP (PI), LBBD
parallel machine
scheduling
(Gaggero et al., 2023) Pm||T EC,C
max
MILP (TI), H
(Che et al., 2017) Rm||T EC MILP (PI), H
(Ding et al., 2016) Rm||T EC MILP (PI), DWR
single machine
scheduling
(Tian and Zheng, 2024) 1|batch|TEC CG-H
(Cheng et al., 2016) 1|batch|TEC MILP (PI)
CG-H : column generation based heuristic TI : time-indexed formulation
MH : matheuristic D : disjunctive formulation
H : problem specific heuristic PI : period-indexed formulation
previously recalled, the problem can be referred to as
Jm||T EC.
3.2 Mathematical Formulation
In this section, a novel MILP for the studied problem
is presented. Its main feature is to be indexed on ToU
periods, since the variables that allow to compute the
cost of the energy consumption associated with an op-
eration are indexed on the ToU periods. In the follow-
ing, symbols j, j
′
∈ J , m,m
′
∈ M and k, k
′
∈ K will
respectively denote jobs, machines and ToU periods.
The decision variables are: 1) binary processing sta-
tus variables x
k
j,m
, modeling whether operation ( j,m)
is processed during period k or not, 2) non-negative
processing duration variables d
k
j,m
, equal to the du-
ration of the processing of operation ( j,m) in period
k, 3) non-negative variables s
j,m
∈ [0,C − p
j,m
] and
c
j,m
∈ [p
j,m
,C], denoting the starting and completion
dates of operation ( j,m) − also known in the litera-
ture as natural date variables, 4) binary machine dis-
junction variables u
j, j
′
,m
for j < j
′
, equal to 1 if job j
is processed earlier than j
′
on machine m, and to 0 if
it is processed later than j
′
on machine m. Further, we
define for each operation ( j,m) the values
s
j,m
=
∑
m
′
∈O
j
( j,m
′
)≺( j,m)
p
j,m
′
, s
j,m
= C − p
j,m
−
∑
m
′
∈O
j
( j,m)≺( j,m
′
)
p
j,m
′
(1)
as the earliest and latest starting dates respectively.
c
j,m
and c
j,m
are defined similarly.
Objective Function: The objective function mini-
mizing the total operational cost of a schedule is
min
∑
k∈K
c
k
∑
m∈M
ϕ
m
∑
j∈J
d
k
j,m
, (2)
which is the sum of energy consumption scaled by the
price over the corresponding periods. The constraints
in the proposed MILP are as follows:
Processing Times Partition: To ensure that the
operations are entirely executed within the given
makespan C, we partition the processing times for
each operation (j,m) across the different periods:
∑
k
d
k
j,m
= p
j,m
, ∀( j,m) ∈ O. (3)
Non-Preemption: To guarantee that operations are
not preempted, it suffices to link the processing time
variables to the natural date ones, which we also need
for precedence. First, variables x and d are linked
through the constraint
d
k
j,m
⩽ min(l
k
, p
j,m
)x
k
j,m
, ∀( j,m) ∈ O,∀k ∈ K , (4)
and to the natural date variables through the following
constraints:
d
k
j,m
⩽ t
k+1
− s
j,m
+ s
j,m
(1 − x
k
j,m
),
∀( j,m)∈O,∀k ∈ K ,
d
k
j,m
⩽ c
j,m
−t
k
x
k
j,m
.
(5)
Constraints (4) act jointly with constraints (5) :
• If x
k
j,m
= 1, i.e. operation ( j,m) executes on pe-
riod k, then ( j,m) has began executing in that pe-
riod or prior to it. The first period is the small-
est k
′
for which x
k
′
j,m
= 1. It has the smallest gap
t
k
′
+1
− s
j,m
, thus d
k
j,m
⩽ t
k
′
+1
− s
j,m
.
• The second constraint is similar but involves the
end dates: the operation completes in the current
period k or after it. The last period is the largest k
′
for which x
k
′
j,m
= 1. It has the smallest gap c
j,m
−
t
k
, thus d
k
j,m
⩽ c
j,m
−t
k
′
.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
322

• In case operation ( j,m) starts and ends in the same
period k, both relations (5) are dominated by the
equation d
k
j,m
⩽ p
j,m
, imposed by (4).
• if ( j,m) spans over n ⩾ 2 consecutive periods
Jk, k + n − 1K, the constraints (4) associated with
k and k +n −1 are dominated, respectively, by the
associated constraints in (5), while the opposite
occurs for intermediate periods Jk + 1,k + n − 2K.
• The first constraint of (5) is not binding if x
k
j,m
=
0, whereas the second constraint is not binding if
x
k
j,m
= 0 due to (4).
Further, the following constraint links the natural date
variables of an operation:
c
j,m
= s
j,m
+ p
j,m
, ∀( j,m) ∈ O, (6)
ensuring that an operation ( j,m) is processed with-
out preemption, whereas relations (3), (4) and (5)
guarantee that the value of its processing time p
j,m
is correctly partitioned into consecutive ToU periods.
Precedence: Precedence constraints write as
c
j,m
⩽ s
j,m
′
, ∀ j ∈ J ,∀m,m
′
∈ M
j
: ( j,m) ≺ ( j,m
′
),
(7)
i.e. ( j,m) completes before the start of ( j,m
′
). Note
that c
j,m
could be replaced by s
j,m
+ p
j,m
in the differ-
ent equations. We maintain this notation for clarity.
Machine Disjunction: To ensure that any two given
operations scheduled on the same machine do not
overlap, we define the precedence variables through
the following big-M constraints:
(
c
j,m
− s
j
′
,m
⩽ ∆
j, j
′
,m
(1 − u
j,j
′
,m
), ∀ j, j
′
∈ J : j < j
′
c
j
′
,m
− s
j,m
⩽ ∆
j
′
, j,m
u
j,j
′
,m
, ∀m ∈ M ,
(8)
where ∆
j, j
′
,m
:
= c
j,m
− s
j
′
,m
. If j precedes j
′
on ma-
chine m, i.e. c
j,m
⩽ s
j
′
,m
, then u
j, j
′
,m
= 1.
3.3 Valid Inequalities
The introduced model PI is compact, involving
a polynomial number of variables and constraints.
However, due to the big-M constraints that linearize
its disjunctive structure, it can result in weak linear
relaxations despite using tight bounds on these con-
straints (Conforti et al., 2014). In the following sec-
tion, we introduce different families of valid inequal-
ities aimed at improving the introduced model.
Transitive Precedence: If operation ( j,m) is sched-
uled on machine m before ( j
′
,m), and ( j
′
,m) is sched-
uled before ( j
′′
,m), then u
j, j
′′
,m
must take value 1:
∀ j, j
′
, j
′′
∈ J : j < j
′
< j
′′
u
j, j
′
,m
+ u
j
′
, j
′′
,m
− 1 ⩽ u
j, j
′′
,m
,
∀m ∈ M .
(9)
Consecutive Period Processing Inequalities:
Given a machine m and a period k, at most one opera-
tion ( j,m) can be processed over k and the following
period k + 1, yielding in that case x
k
j,m
+ x
k+1
j,m
= 2.
Based on this consideration, we can write:
∀ j, j
′
∈ J : j < j
′
,
x
k
j,m
+ x
k+1
j,m
+ x
k
j
′
,m
+ x
k+1
j
′
,m
⩽ 3,
∀m ∈ M ,∀k ⩽ |K | − 1.
(10)
Via similar reasoning, all operations ( j, m) of dura-
tion lesser or equal than the shortest ToU period can
execute over at most two periods:
∑
k∈K
x
k
j,m
⩽ 2, ∀( j,m) ∈ O : p
j,m
⩽ min
k
l
k
. (11)
Non-Preemption Inequalities: If operation ( j,m)
completes at a period k, i.e. x
k
j,m
= 1 and x
k+1
j,m
= 0,
then processing cannot occur at periods k
′
⩾ k + 1:
∀( j,m) ∈ O,
|K |
∑
k
′
=k+1
x
k
′
j,m
⩽ (|K | − k)(1 − x
k
j,m
+ x
k+1
j,m
),
∀k ⩽ |K | − 1.
(12)
Similarly, we can derive inequalities for the opposite
case, in which the processing of ( j,m) starts at k:
∀( j,m) ∈ O,
k−2
∑
k
′
=1
x
k
′
j,m
⩽ (k − 2)(1 − x
k
j,m
+ x
k−1
j,m
),
∀k ⩾ 3.
(13)
Further, if the processing of ( j,m) extends over two
non-consecutive periods, then it must process over the
intermediate one:
∀( j,m) ∈ O,
x
k
j,m
⩾ x
k−1
j,m
+ x
k+1
j,m
− 1,
∀k ∈ J2,|K | − 1K.
(14)
Precedence Inequalities: Consider two operations
of the same job ( j,m) and ( j,m
′
) s.t. ( j,m) ≺ ( j,m
′
).
If ( j,m
′
) executes over period k, ( j,m) cannot execute
over all subsequent periods. As such, we have:
∀m,m
′
∈ O
j
:
K
∑
k
′
=k+1
x
k
′
j,m
⩽ (|K | − k)(1 − x
k
j,m
′
), ( j,m) ≺ ( j,m
′
),
∀k ⩽ |K| − 1.
(15)
The explanation of (15) is similar to that of relations
(12) and (13). They are non-binding if x
k
j,m
′
= 0, and
force all variables x
k
′
j,m
,(k
′
> k) to be 0 otherwise. By
the same logic, this applies to the preceding periods:
∀m,m
′
∈ O
j
:
k−1
∑
k
′
=1
x
k
′
j,m
′
⩽ (k − 1)(1 − x
k
j,m
), ( j,m) ≺ ( j,m
′
),
∀k ⩾ 2.
(16)
Processing Duration Inequalities: We can de-
rive upper bounds on period processing duration, i.e.
d
k
j,m
⩽ d
k
j,m
, where for each operation ( j,m) and period
Minimizing Energy Cost in a Job-Shop Scheduling Problem Under ToU Pricing: A New Method Based on a Period-Indexed MILP
323
k, we have:
d
k
j,m
=
0 if t
k+1
⩽ s
j,m
∨ c
j,m
⩽ t
k
,
t
k+1
− s
j,m
if t
k
⩽ s
j,m
⩽ t
k+1
,
c
j,m
−t
k
if t
k
⩽ c
j,m
⩽ t
k+1
,
l
k
otherwise.
This allows us to replace (4) by a stronger inequality:
d
k
j,m
⩽ min(l
k
, p
j,m
,d
k
j,m
)x
k
j,m
, ∀( j,m) ∈ O,∀k ∈ K .
(17)
Non-Overlap Inequalities: Given a period k and a
machine m, the sum of the processing durations of all
of the associated operations must not exceed the pe-
riod length due to the non-overlapping requirement.
This also applies to operations of jobs given the prece-
dence relations. It follows that:
∑
j∈J
d
k
j,m
⩽ l
k
, ∀m ∈ M ,∀k ∈ K . (18)
∑
m∈M
d
k
j,m
⩽ l
k
, ∀ j ∈ J ,∀k ∈ K . (19)
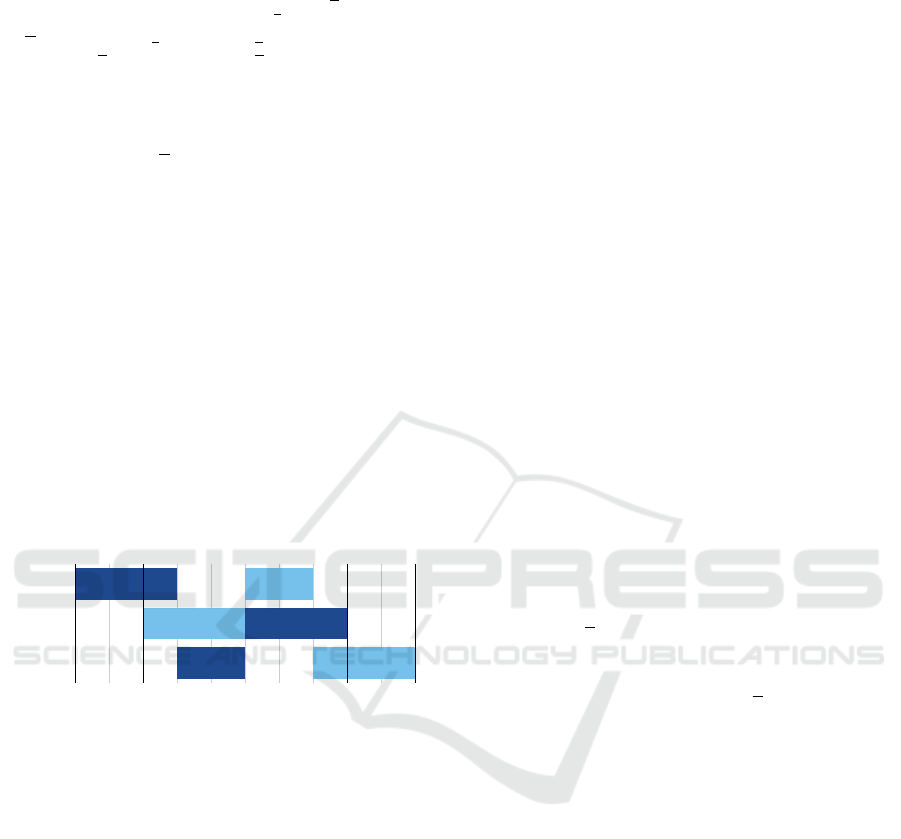
Consider the feasible schedule provided in Figure 1
with jobs J
1
and J
2
and machines M
1
, M
2
and M
3
. In
the second period starting at t
1
and ending at t
2
, we
have d
2
1,2
+ d
2
2,2
⩽ l
2
and d
2
2,2
+ d
2
2,1
+ d
2
2,3
⩽ l
2
.
M
1
(1,1) (2,1)
M
2
(2,2) (1,2)
M
3
(1,3) (2,3)
t
0
t
1
t
2
t
3
Figure 1: A two job, three machine example.
Note: Inequalities similar to (12), (13) and (18)
were used as model-defining constraints in Che et al.
(2017) for a parallel machine scheduling problem.
4 COMPUTATIONAL
EXPERIMENTS
In this section, we analyze the performance of the
time-indexed model against the proposed period-
indexed one. Further, we seek to assess the impact of
the derived valid inequalities on improving the model
linear relaxation and the Branch&Bound tree search.
The MILPs have been implemented on Julia 1.10 and
solved using Gurobi 11.0. Experiments are run with a
time limit of one hour, on a single thread of a 28-core
Intel Xeon Gold 6132, 2.60 GHz machine.
Set of Instances: We tested our formulation on the
benchmark instances provided by Masmoudi et al.
(2019). In that work, the Jm|φ
max
|T EC is tackled,
which generalizes the problem presented here by
considering a limit on the power usage along the
schedule, and two families of instances are derived
from the JSSP instances ft06 (Fisher and Thomp-
son, 1963) with 6 jobs and 6 machines, and la04
(Lawrence, 1984) with 5 jobs and 10 machines. The
authors enhance the instances with: a) 5 different sets
ϕ
i
of machine power values drawn randomly from
U[5, 10], b) 3 different planning horizon values λ ·C
⋆
with λ ∈
1.0,1.1,1.2
, C
⋆
denoting the minimal
makespan under a maximum power constraint, c) 3
different power peak thresholds equal to α ·
∑
m
ϕ
m
with α ∈
0.7,0.9,1.0
. Of the 90 resulting in-
stances, we consider the 30 having α = 1.0, as this
makes the peak power constraint non-binding and
gives rise to the Jm||T EC problem studied here.
As for the ToU tariffs, we considered the ones
used in the original instances based on the electricity
price profiles in France with on- and off-peak periods.
Base Model: In Table 2, we compare the results of
the reference time-indexed model of Masmoudi et al.
(2019) referred to as IP2, and the period-indexed for-
mulation (3)-(8), which we refer to as PI
0
. The com-
parison is performed on the basis of the 30 considered
instances under a 3600s time limit, averaged over the
machine power values, since they are drawn from the
same uniform distribution. For each model, the col-
umn T/(%)/[#x] reports the CPU time T for solving
the instance to optimality, or the final gap (%) if op-
timality is not proven within the time limit alongside
the number of feasible solutions [#x]. We also report
the gap %
r
between the root relaxation and the best
known solution, as well as the number of nodes #n
explored in the B&B tree before optimality is proven
or the time limit is exceeded. The best known solu-
tion is always optimal, as for all instances, at least one
of the two algorithms finds an optimum within time
limit. Further, we provide a comparison of the size of
the two models using the ratio of the number of vari-
ables (#cols) and that of the constraints (#rows), both
measured prior to Gurobi presolve.
The results seem to suggest that the parameter λ
has an impact on the effectiveness of IP2 and PI
0
.
In fact, for λ = 1.0, the PI
0
-based algorithm consis-
tently outperforms its IP2 counterpart despite larger
root gaps: optimal solutions are found significantly
faster for the 5 ft06 instances, while for the la04 ones,
for which IP2 cannot find cannot prove optimality (2
cases) or even find feasible solutions (3 cases), PI
0
converges to optimal solutions in 20s on average.
In general, the PI
0
-based algorithm is capable
of finding feasible solutions more quickly while IP2
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
324

Table 2: Comparison of the proposed model in its base form PI
0
and the time-indexed model IP2 of Masmoudi et al. (2019).
IP2 PI
0
relative
PI
0
IP2
inst./λ T/(%)/[#x] %
r
#n T/(%)/[#x] %
r
#n #cols #rows
ft06/1.0 0.25 0.27% 1 0.02 12.37% 1 0.20 0.33
ft06/1.1 0.368 0.05% 1 2.21 10.68% 2222 0.19 0.30
ft06/1.2 2.842 0.17% 16.4 64.40 10.28% 51K 0.20 0.32
la04/1.0 (0.63%)/[2] 0.47% 60 20.626 12.60% 3910 0.023 0.04
la04/1.1 1432.06 0.00% 8.6 (2.82%)/[5] 11.85% 612K 0.024 0.04
la04/1.2 2564.31 0.00% 27.6 (5.25%)/[5] 11.85% 506K 0.022 0.04
yields a tighter linear relaxation, which is in line with
the conclusions from Masmoudi et al. (2019). For
λ = 1.0, PI
0
is able to reach optimality within the
time limit as a result of a reduced search space, due
to the scheduling horizon being the smallest possible.
In contrast, the IP2-based algorithm encounters diffi-
culties in finding initial feasible solutions, particularly
for the la04 instances. The issue with IP2 appears to
be the computational time required for linear relax-
ations at each node of the B&B tree. Specifically, for
the la04 set at λ = 1.0, at most 60 nodes are visited on
average. Meanwhile, for PI
0
, the linear relaxation of
a node is computed much more rapidly, allowing it to
explore more nodes.
As λ increases beyond 1.0, the longer time hori-
zons expand the search space and expose the sym-
metry of PI
0
, leading to a shift in performance be-
tween the two models. Despite the increased time re-
quired to prove optimality, the IP2-based algorithm
finds feasible solutions more easily than PI
0
on the
la04 set and, with its tighter dual bound, proves op-
timality more quickly after exploring a comparable
number of nodes. Particularly, it can find the optimal
solution relying mostly on the root linear relaxation,
and in four cases, the optimal solution is reached at
the root node. Conversely, while the PI
0
-based algo-
rithm continues to find feasible solutions quickly, it
struggles to close the optimality gap due to the pres-
ence of numerous equivalent solutions as well as less
effective pruning due to looser relaxations, causing a
significant increase in the number of explored nodes.
Table 3: Runtime % to improve UB and LB for PI
0
.
inst./λ finding optimum proving optimality
ft06/1.0 0.1% 99.9%
ft06/1.1 6.0% 94.0%
ft06/1.2 7.8% 92.2%
la04/1.0 62.2% 38.8%
la04/1.1 0.2% -
la04/1.2 0.3% -
To this end, Table 3 aims to highlight the percent-
age of time for PI
0
that is spent on 1) finding a fea-
sible solution with optimal objective value, and once
it is found, 2) proving its optimality. From the re-
sults above, it appears that the majority of runtime is
spent on proving optimality. Note that for λ > 1.0,
even though incumbents with optimal objective val-
ues are identified early in the execution, the model
fails to close the gap.
Valid Inequalities: In Table 4, we show the impact
of different families of cuts on the efficiency of PI
0
.
Symbols T/(%), %
r
and #n have the same meaning as
in Table 2. The following PI
0
variants are tested,
• PI
1
, statically adding inequalities (9)-(16),
• PI
2
, incorporating inequalities (17)-(19),
• PI
all
, including all the described valid inequalities.
The studied valid inequalities were categorized based
on the involvement of processing duration variables,
particularly through upper-bound constraints rather
than if-then implications. Since processing durations
are partitioned across periods with varying costs, min-
imizing a total weighted sum tightens these upper-
bound constraints, especially in low-cost ToU peri-
ods. Further, non-overlap is modeled using big-M
constraints (8) on variables linked to processing du-
ration variables via inequalities (5), potentially con-
tributing to the weak relaxation in the base model.
The results of Table 4 demonstrate that the second set
of inequalities in PI
2
have a stronger impact. Opti-
mality is proven within at most four seconds on all
instances, which is a significant reduction in comput-
ing time, especially for larger λ values. For the la04
instances, as the time horizon grows, the impact of
these inequalities becomes greater as opposed to the
trend that PI
0
shows. Conversely, for the ft06 set, both
computing time and the number of explored nodes
grow as λ increases for all formulations. Further, the
second set of inequalities alone reduce the root gap
to the same order of magnitude as the much tighter
time-indexed model IP2. This is especially evident in
the la04 instances: for λ = 1.1 and λ = 1.2, the root
Minimizing Energy Cost in a Job-Shop Scheduling Problem Under ToU Pricing: A New Method Based on a Period-Indexed MILP
325

Table 4: Comparison of the different proposed PI
0
variants on the ft06 and la04 instances.
PI
0
PI
1
PI
2
PI
all
inst./λ T/(%) %
r
#n T/(%) %
r
#n T/(%) %
r
#n T/(%) %
r
#n
ft06/1.0 0.02 12.4% 1 0.02 12.4% 2 0.01 0.9% 1 0.01 0.9% 1
ft06/1.1 2.21 10.7% 2232 3.07 10.7% 2473 0.40 0.6% 470 0.62 0.6% 386
ft06/1.2 64.40 10.3% 50K 56.92 10.3% 38K 1.96 0.9% 1606 2.45 0.9% 1165
la04/1.0 20.62 12.6% 3910 23.14 12.6% 3700 4.00 0.5% 2237 6.44 0.5% 1900
la04/1.1 (2.8%) 11.8% 612K (3.3%) 11.8% 276K 0.18 0.0% 75 0.53 0.0% 86
la04/1.2 (5.3%) 11.8% 506K (5.4%) 11.8% 205K 0.05 0.0% 1 0.14 0.0% 1
gap reduces to 0%, whereas the average number of ex-
plored nodes decreases to just 75 and 1, respectively.
On the other hand, while the number of explored
nodes is reduced on four of the six sets for PI
1
, the
computing time remains almost unchanged with re-
spect to PI
0
. The performance of the root gap sug-
gests that the inequalities (9)-(16) overburden the lin-
ear relaxations at each node without improving the
gap, whereas the reduction in the number of nodes
could be attributed to bound propagation and locally
valid cuts within individual parts of the tree. Further,
when combining both families of inequalities in PI
all
,
we notice a slight loss of time performances with re-
spect to PI
2
throughout the whole benchmark set, de-
spite exploring equal or fewer nodes overall. We can
conclude that on the tested instances, the PI
2
-based
B&B is the most-performing algorithm.
Table 5: Root relaxation time and model size comparison.
inst. IP2 PI
0
PI
2
#rows
PI
2
IP2
ft06 < 0.1ms < 0.1ms < 0.1ms 0.35
la04 214.12s < 0.1ms 10ms 0.05
Table 5 compares the CPU time required to solve
the root node relaxation for IP2, PI
0
, and PI
2
, along
with the ratio of the number of rows between IP2
and PI
2
, aggregated by instance. While IP2 provides
strong relaxations, its computational cost significantly
rises for larger instances. In contrast, the valid in-
equalities introduced for PI
2
enhance the quality of
the root relaxation as shown in Table 4, with negligi-
ble impact on the model size and computation time.
These results highlight the strength of formulation
PI
2
on the tested instances. After adding inequal-
ities (17)-(19), the proposed period-based MILP (a)
remains compact, (b) retains its ability to quickly find
high-quality feasible solutions, (c) achieves a strong
root relaxation, (d) whilst also being able to solve
each linear relaxation relatively fast.
5 CONCLUSION AND FUTURE
WORK
In this work, we address the job-shop scheduling
problem under energy considerations, specifically
focusing on minimizing total energy costs within
a Time-of-Use (ToU) pricing scheme, denoted as
Jm||T EC. To achieve this, we propose a novel period-
indexed MILP, in which the variables used to com-
pute the cost of the energy usage of operations are
indexed based on the periods of the ToU profile. This
approach was preferred to a time-indexed alternative
to obtain a more compact MILP, as time-indexed for-
mulations can be very effective, but struggle when the
considered time span gives rise to large mathematical
programs, as it is the case with the reference TI model
in the literature.
Our results indicate that the proposed period-
indexed model is well-suited for achieving signif-
icantly smaller model sizes, and the Branch-and-
Bound (B&B) tree node linear relaxations can be
computed up to six orders of magnitude faster for
some of the tested instances with a larger time span.
With instances featuring a time horizon equal to the
optimal makespan of the original JSSP instance, the
B&B algorithm based on the period-indexed model
in its basic setting outperforms the time-indexed one.
This is due to the fact that the proposed period-
indexed formulation, in spite of weak linear relax-
ations, allows to find feasible solutions more easily
than the time-indexed counterpart, largely due to the
model size. However, as the time span is enlarged,
the latter benefits of larger scheduling horizons, find-
ing more feasible solutions and then converging more
quickly due to the tighter linear relaxation, whereas
the former struggles to close the optimality gap.
To address this issue, we explored the addition
of different sets of valid inequalities to the proposed
period-indexed model in order to tighten its linear re-
laxation. Three different variants of the base model
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
326

were tested in which the proposed valid inequalities
were alternatively or jointly considered. The results
show that inequalities aimed at strengthening non-
overlap constraints and tightening the bounds of the
period-indexed variables are the most effective. This
is because they allow the linear relaxation to be com-
parable to that of the time-indexed model, despite a
smaller number of variables and constraints, hence
preserving these advantages while ensuring a much
quicker convergence.
Future research directions include strengthening
the less-effective valid inequalities and/or adding
them dynamically in the B&B tree through tailored
separation routines. From a combinatorial perspec-
tive, it would certainly be interesting to generalize
the piecewise-constant ToU profile and consider more
complex cost structures. Another interesting direction
would be to consider variable power profiles instead
of constant ones. Finally, the flexibility of the period-
indexed formulation opens the possibility for its ap-
plication to other scheduling problems, as well as the
incorporation of other constraints, such as release and
due dates, as well as setup times, making it a versatile
tool for broader industrial applications dealing with
energy cost minimization.
REFERENCES
Bley, A. and Linß, A. (2022). Propagation and branch-
ing strategies for job shop scheduling minimizing
the weighted energy consumption. In International
Conference on Operations Research, pages 573–580.
Springer.
Che, A., Zhang, S., and Wu, X. (2017). Energy-conscious
unrelated parallel machine scheduling under time-of-
use electricity tariffs. Journal of Cleaner Production,
156:688–697.
Cheng, J., Chu, F., Chu, C., and Xia, W. (2016). Bi-
objective optimization of single-machine batch
scheduling under time-of-use electricity prices.
RAIRO - Operations Research, 50:715–732.
Conforti, M., Cornu
´
ejols, G., Zambelli, G., Conforti, M.,
Cornu
´
ejols, G., and Zambelli, G. (2014). Integer pro-
gramming models. Springer.
Dauz
`
ere-P
´
er
`
es, S., Ding, J., Shen, L., and Tamssaouet, K.
(2024). The flexible job shop scheduling problem: A
review. European Journal of Operational Research,
314(2):409–432.
Ding, J. Y., Song, S., Zhang, R., Chiong, R., and Wu, C.
(2016). Parallel machine scheduling under time-of-
use electricity prices: New models and optimization
approaches. IEEE Transactions on Automation Sci-
ence and Engineering, 13:1138–1154.
Fisher, H. and Thompson, G. (1963). Probabilistic learn-
ing combinations of local job-shop scheduling rules.
Prentice Hall, Englewood Cliffs, New Jersey, pages
225–251.
Gaggero, M., Paolucci, M., and Ronco, R. (2023). Exact
and heuristic solution approaches for energy-efficient
identical parallel machine scheduling with time-of-
use costs. European Journal of Operational Research,
311:845–866.
Garey, M. R., Johnson, D. S., and Sethi, R. (1976).
The complexity of flowshop and jobshop scheduling.
Mathematics of operations research, 1(2):117–129.
Graham, R., Lawler, E., Lenstra, J., and Kan, A. (1977).
Optimization and approximation in deterministic se-
quencing and scheduling: A survey. Annals of Dis-
crete Mathematics, 5:287–326.
Ho, M. H., Hnaien, F., and Dugardin, F. (2022). Exact
method to optimize the total electricity cost in two-
machine permutation flow shop scheduling problem
under time-of-use tariff. Computers and Operations
Research, 144.
International Energy Agency (2023). World en-
ergy outlook 2023. https://www.iea.org/reports/
world-energy-outlook-2023. Accessed: 2024-10-01.
Jiang, E. and Wang, L. (2020). Multi-objective optimization
based on decomposition for flexible job shop schedul-
ing under time-of-use electricity prices. Knowledge-
Based Systems, 204.
Lawrence, S. (1984). Resouce constrained project schedul-
ing: An experimental investigation of heuristic
scheduling techniques (supplement). Graduate School
of Industrial Administration, Carnegie-Mellon Uni-
versity.
Masmoudi, O., Delorme, X., and Gianessi, P. (2019).
Job-shop scheduling problem with energy considera-
tion. International Journal of Production Economics,
216:12–22.
Park, M. J. and Ham, A. (2022). Energy-aware flexible job
shop scheduling under time-of-use pricing. Interna-
tional Journal of Production Economics, 248.
Pinedo, M. (2016). Scheduling: Theory, Algorithms, and
Systems. Springer, 5th edition.
Tian, Z. and Zheng, L. (2024). Single machine parallel-
batch scheduling under time-of-use electricity prices:
New formulations and optimisation approaches. Euro-
pean Journal of Operational Research, 312:512–524.
Minimizing Energy Cost in a Job-Shop Scheduling Problem Under ToU Pricing: A New Method Based on a Period-Indexed MILP
327
