
Next-Generation Design Tools for Intelligent Transportation Systems
Dominik Ascher
1
and Georg Hackenberg
2
1
Faculty of Electrical Engineering and Computer Science, Technical University of Berlin, 10587 Berlin, Germany
2
School of Engineering, University of Applied Sciences Upper Austria, Stelzhamerstraße 23, 4600 Wels, Austria
Keywords:
Model- and Simulation-Based Systems Engineering, Model-Based Design, Intelligent Transportation
Systems.
Abstract:
Intelligent Transportation Systems (ITS) promote new transportation paradigms such as connected and au-
tonomous vehicles (CAV), multi-modal and demand-responsive transport systems, and enable the transporta-
tion electrification by sustainable operation of electric vehicles. Methods and tools are needed to explore the
possible design space for emerging transportation paradigms, which support evaluation of system design alter-
natives and verification of system properties. In this work, we propose a model- and simulation-based systems
engineering framework for capturing design decisions and evaluating control strategies for ITS design. In
addition to capturing and evaluating different design decisions, the proposed solution allows users to guide
design decisions by systematic comparison and evaluation of system configurations and control strategies.
1 INTRODUCTION
The transformative patterns of future mobility are en-
abled by interconnected as well as integrated sys-
tems and services. For this, Intelligent Transportation
Systems (ITS) establish new transportation paradigms
such as connected and autonomous vehicles (CAV)
(Kopelias et al., 2020), multi-modal and demand-
responsive transport systems (Brake et al., 2004), as
well as the transportation electrification by sustain-
able operation of electric vehicles (Zhang and Fuji-
mori, 2020). In order to minimize environmental im-
pacts, complex scenarios between these systems and
their requirements need to be holistically addressed,
from which integrated system designs are derived,
which enable transportation infrastructure and het-
erogenous actor efficiency and sustainability.
To systematically support the aforementioned sys-
tems engineering task, model- and simulation-based
systems engineering (Gianni et al., 2014) can be em-
ployed for abstraction of design problems through the
formulation of system models and their evaluation in
terms of concrete behavior at run time, where simu-
lation aids projecting run-time information and per-
formance metrics about the system under design and
environment. However, as systems and their under-
lying requirements are typically imperfectly under-
stood at the beginning of the design task, methods and
tools are needed to explore the possible design space
for emerging transportation paradigms, which support
evaluation of system design alternatives and verifica-
tion of system properties.
With our research, we want to help improve the
efficiency, effectiveness and sustainability of today’s
transportation systems. To achieve this goal, we work
on methodologies for designing such systems and ver-
ifying their properties. Fundamentally, we promote a
formal approach capturing the relevant design deci-
sions and their relations. Furthermore, we integrate
scenario-based simulation of system dynamics and
evaluation of emergent properties. Finally, we ex-
ploit optimization algorithms for optimizing system
dynamics as well as static design decisions.
In this paper, we explore how the next gener-
ation of design tools for ITS addressing emerging
paradigms could look like. Therefore, first we want
to understand which system properties and design de-
cisions should be represented in these tools. Then, we
want to learn how design decisions could be verified
with respect to the desired system properties. Finally,
we want to study how the relevant design information
could be represented in a graphical user interface.
In the following, we first describe an overview of
related work for our approach in Section 2. Then,
we describe approach and methodology for a model-
and simulation-based systems engineering framework
for capturing and evaluating design decisions in Sec-
tion 3. Thereafter, we describe a tool prototype for
building system designs, conducting simulation runs,
and visualizing simulation outcomes in Section 4.
234
Ascher, D. and Hackenberg, G.
Next-Generation Design Tools for Intelligent Transportation Systems.
DOI: 10.5220/0013183200003896
In Proceedings of the 13th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2025), pages 234-241
ISBN: 978-989-758-729-0; ISSN: 2184-4348
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

2 RELATED WORK
We discuss related work for ITS in terms of infras-
tructure planning, eco-routing and driving, coopera-
tive driving as well as mobility-on-demand systems.
Infrastructure Planning. Traffic simulation tools
such as PTV Vissim (Fellendorf, 1994), MATSim
(W Axhausen et al., 2016), SUMO (Lopez et al.,
2018) as well as AIMSUN (Barcel
´
o and Casas, 2005)
support analysis and decision-making for transporta-
tion systems engineering problems. For instance,
SUMO can be used to assess mesoscopic to micro-
scopic traffic scenarios, based on behavior models
for passenger and vehicle behavior, and infrastruc-
ture models separating links, intersections and lanes
for different transport modalities, while implement-
ing actor and traffic control strategies.
Eco-Routing and -Driving. Eco-routing (Ericsson
et al., 2006) describes a concept, which focuses on
traffic participants and their routes in terms of tar-
geting energy-efficient route selection and reduction
of emissions, whereas the concept of Eco-Driving
(Huang et al., 2018) focuses on energy-efficient in-
termediate driving behavior. Potential congestions
may arise within transport networks of single modali-
ties due to their excessive utilization, where energy-
efficient utilization of different transport modalities
can be targeted (Namoun et al., 2021).
Cooperative Driving. Cooperative driving of in-
telligent connected vehicles (Wang et al., 2022) is
enabled by Vehicle-to-Vehicle (V2V), Vehicle-to-
Infrastructure (V2I) or Vehicle-to-Everything (V2X)
communication. Specific use-cases include vehicle
platooning (Jia et al., 2015), management of dis-
tributed electric vehicle fleets and their integration to
stabilize ancillary systems such as the power grid in
the context of Vehicle-to-Grid (V2G) (Hu et al., 2016)
applications, as well as alignment of different trans-
portation modalities (Harris et al., 2015).
Mobility-on-Demand. Mobility-on-demand sys-
tems refer to systems, where transportation demands
get covered by transportation modalities, which
make up the transportation supply. Here, Rideshar-
ing favors shared mobility over personal mobility,
bringing together passengers with a shared route
in shared vehicles (Furuhata et al., 2013). In au-
tonomous mobility-on-demand systems, autonomous
transportation modalities cover transportation supply
while increasing system efficiency (Fagnant and
Kockelman, 2014).
3 METHODOLOGY AND
APPROACH
Our model- and simulation-based systems engineer-
ing approach is based on (Ascher and Hackenberg,
2015; Ascher and Hackenberg, 2016; Ascher and
Hackenberg, 2017; Ascher et al., 2023; Ascher and
Hackenberg, 2023) and employs an integrated sys-
tems modeling technique for design of integrated ITS
systems and investigation of emergent system prop-
erties. Our modeling technique supports both static
property, i.e. structural and infrastructure design, and
dynamic property design, i.e. behavior and control
strategy design. Here, Figure 1 shows an overview of
the system design methodology.
Figure 1: System design methodology.
Subsequently, first the intended usage of the
framework is described in Section 3.1. Secondly,
domain-specific design concepts for the framework
are described in Section 3.2. Thirdly, problem solu-
tion for design problems is described in Section 3.3.
3.1 Intended Usage
We subsequently describe use-cases considering dif-
ferent roles for our systems engineering approach for
investigation of static and dynamic properties:
Transportation System Engineers (TSEs). main-
tain and design transportation infrastructure.
• Static Properties: TSEs may be supported in the
investigation of transportation infrastructure prop-
erties such as placement of intersections and links,
and capacities of links such as number of lanes.
• Dynamic Properties: TSEs may be supported in
devising traffic control strategies and semaphores
incorporating demand-responsive cycle times.
Charge Point Operators (CPOs). maintain and
operate a charging infrastructure in a defined area.
• Static Properties: CPOs may be supported in de-
vising charging infrastructure such as planning of
placement and capacity of charging stations along
most frequented routes and points of interest.
Next-Generation Design Tools for Intelligent Transportation Systems
235
• Dynamic Properties: CPOs may be supported in
charging scheduling and coordination during peak
demand and renewable energy supply times.
Mobility Feet Operators (MFOs). coordinate and
manage a fleet of vehicles serving demands.
• Static Properties: MFOs may be supported in de-
termination of fleet capacity as well as planning
of vehicle types and modalities to be utilized.
• Dynamic Properties: MFOs may be supported in
determining routing and driving decisions for mo-
bility fleets with respect to underlying goals such
as energy-efficiency or shortest traveling or wait-
ing times while serving transportation demands.
3.2 System Theory
The approach allows domain-specific modeling of
integrated transportation system problems on meso-
scopic to microscopic levels. Figure 2 depicts
domain-specific modeling concepts. Subsequently,
we provide a brief overview of domain concepts,
states, as well as events, where we refer to (Ascher
and Hackenberg, 2023) for a detailed overview.
Figure 2: Domain-specific modeling concepts.
Concepts. The formalism defines intersections i ∈
I, segments s ∈ S as well as locations l ∈ L for de-
scribing properties about the transportation infras-
tructure. Based on the transportation infrastructure,
we use charging stations cs ∈ CS for describing the
charging infrastructure. Furthermore, we use vehicles
v ∈ V to describe the transportation supply and ca-
pacities. Transportation demands d ∈ D are based on
the transportation infrastructure, and temporarily con-
sume transportation capacities such as vehicles.
States. Based on the concepts, we describe dynamic
(i.e. time-dependent) state functions for charging sta-
tions S
CS
, demands S
D
, as well as vehicles S
V
:
• In terms of charging station states S
CS
, we de-
scribe the current vehicle which is connected to
the charging station S
CS.CV
, as well as the current
charge speed S
CS.CCS
.
• In terms of demand states S
D
, we describe the cur-
rent vehicle carrying the demand S
D.CV
, as well as
the current location of the demand S
D.CL
.
• For vehicle states S
DV
, we describe the current
battery level of the vehicle S
V.CBL
, the current lo-
cation of the vehicle S
V.CL
, as well as the current
drive speed of the vehicle S
V.CDS
.
Events. We define the following domain-specific
events E:
• Events indicating vehicle arrival at intersections
E
V.AI
or vehicle departure at intersections E
V.DI
to
derive routing decisions.
• Events indicating vehicle arrival at charging sta-
tions E
V.ACS
to derive charging decisions.
• Events indicating vehicle arrival at demand pick-
up locations E
V.ADP
and at drop-off locations
E
V.ADD
to derive pick-up and drop-off decisions.
• Events indicating faster vehicle arrival at slower
vehicles E
V.AV S
, as well as faster vehicle departure
at slower vehicles E
V.DV S
to derive overtaking de-
cisions on the same segment.
• Events indicating demand appearance E
D.AD
to
derive decisions for vehicles to serve demands.
• Events indicating vehicle drive speed change
E
V.CDS
and charge speed change E
V.CCS
to derive
decisions for overtaking and charging behaviors.
• Events indicating vehicle batteries becoming
empty E
V.CBE
or full E
V.CBF
to derive decisions
for stopping driving and charging behaviors.
3.3 Problem Solution
For solving according design problems, Dynamic
Programming (DP) (Bellman, 1957) methods can be
employed for small-scale problems by iteratively ex-
ploring the state space over a defined time horizon to
find an optimal solution, but are subject to increas-
ing problem complexity with increasing dimension-
ality of parameter, state and action spaces, i.e. the
curse of dimensionality (Bellman, 1957), restricting
their applicability. To reduce simulation and decision
making complexity, we apply the following methods:
Monte-Carlo Simulation. methods are used,
which partially and/or randomly sample the state
space until an sufficient number of samples is reached
for exploration to limit problem complexity (Ascher
and Hackenberg, 2015).
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
236
Discrete-Event Simulation. is used, where events
are defined as functions over a system’s trajectory of
states, which indicate when actions need to be taken in
the system simulation, thereby reducing action space
dimensionality (Ascher and Hackenberg, 2023).
Heuristic Search. procedures are employed, which
are iteratively designed by domain experts, where
simulation results are utilized to adapt heuristic con-
trol logic as needed (Ascher and Hackenberg, 2015).
Approximate Dynamic Programming. methods
employ approximations of policy and value functions
(Powell, 2007), which are used to reduce DP problem
complexity (Ascher et al., 2023).
4 TOOL PROTOTYPE
Based on the general approach explained in Section 3
we started developing an open source tool prototype
hosted on GitHub
1
, which we subsequently describe:
In Section 4.1 we describe core data structures for
representing both static system configurations and dy-
namic system states. Then, in Section 4.2 we explain
how users can implement and integrate different con-
trol strategies into the tool prototype. Next, in Sec-
tion 4.3 we describe data collected during simulation
runs which can be used for visualizations and possibly
training. In Section 4.4 we provide an overview of the
engine, which computes discrete events and updates
system states accordingly. Finally, in Section 4.5 we
highlight two different framework applications.
4.1 Data Structures
The model module provides the core data structures
for modeling static system configurations and repre-
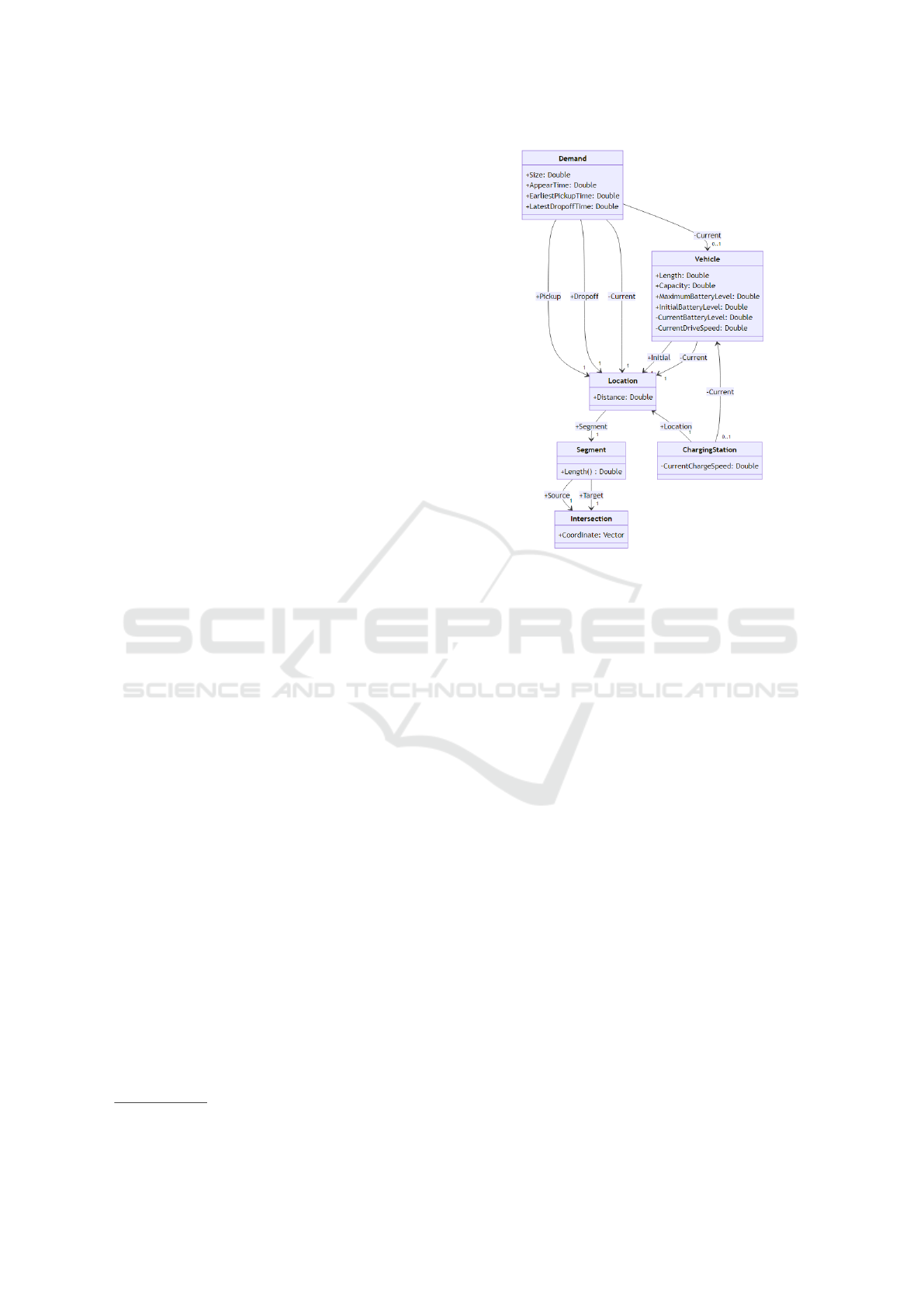
senting dynamic system states. Figure 3 shows the
classes, their attributes, and their relationships.
The Intersection class represents intersections
of the driving infrastructure. Each intersection stores
its coordinate in three-dimensional space. Note that
we use Cartesian coordinates for simplicity.
The Segment class represents road segments of
the driving infrastructure. Each segment points to its
source and target intersection and provides a method
for computing its length based on Euclidean distance.
The Location class represents specific points on
the segments of the driving infrastructure, where each
1
https://github.com/ghackenberg/transport-ide
Figure 3: Configuration and simulation data model.
location points to a corresponding segment. Further-
more, each location stores a distance on this segment
measured in Eclidean units of the Cartesian space.
The ChargingStation class represents the charg-
ing infrastructure. Each charging station stores its
location on the driving infrastructure. Furthermore,
each charging station optionally points to a current
vehicle. Each charging station provides the current
charging speed, where the simulator computes the
current charging speed dynamically.
The Vehicle class represents the driving re-
sources. Each vehicle provides an initial and a cur-
rent location on the driving infrastructure. The initial
location defines the position of the vehicle in the ini-
tial state of the simulation. Then, the simulator con-
tinuously updates the current location of the vehicle.
Furthermore, each vehicle stores a length and a capac-
ity, a maximum, an initial, and a current battery level,
and a current drive speed. The length determines how
much space the vehicle occupies on the driving infras-
tructure. The capacity defines how much demand the
vehicle can carry. The maximum battery level spec-
ifies the size of the energy storage. The initial bat-
tery level stores the load state of the enery storage at
simulation start. Finally, the simulator continuously
updates current battery level and current drive speed.
The Demand class represents the transportation
loads to be served. Each demand points to a pickup
and a dropoff location as well as a current location
Next-Generation Design Tools for Intelligent Transportation Systems
237

and vehicle. Furthermore, each demand stores a size
as well as an appear, and earliest pickup, and a latest
dropoff time. The simulator continuously updates the
current location and vehicle.
4.2 Control Strategies
During a simulation run, a number of control deci-
sions have to be taken. For example, when arriving
at an intersection each vehicle has to select the next
outgoing road segment. Similarly, when arriving at
a demand pickup location each vehicle as to decide
whether to serve the demand or not. The overall sys-
tem performance heavily depends on the optimality
of the individual choices made during a simulation
run. Therefore, one key engineering task for this class
of systems is to develop an appropriate control strat-
egy. Since desired control strategies cannot be hard-
coded upfront, the simulator supports plugging in and
testing different strategies, which must implement the
controller interface methods depicted in Figure 4.
Figure 4: Methods of the controller interface.
We currently provide four different implementa-
tions of the controller interface: A manual, a ran-
dom, a greedy, and a smart control strategy. Figure 5
provides an overview of the four control strategies and
their decision logic. Columns of the matrix represent
individual control strategies, rows represent decisions
to be taken, and cells represent corresponding logic.
Figure 5: Overview of the control strategies.
In the following, we describe the logics behind
each of the control strategies in more detail.
4.2.1 Manual Control Strategy
The manual control strategy delegates routing, de-
mand pickup, and charge decisions to the tool user
using input dialogs. The remaining control decisions
are derived automatically.
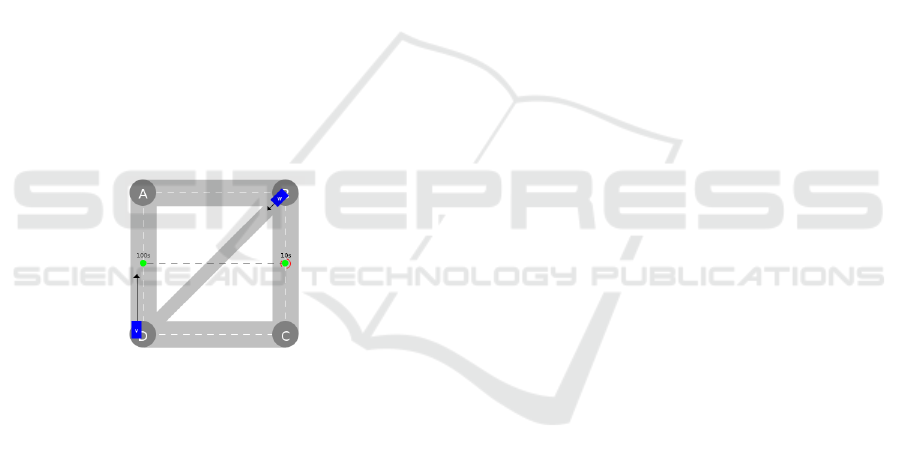
Figure 6 shows the input dialog for route deci-
sions, which pops upon vehicle arrival at an intersec-
tion. It provides the vehicle name (V in the example)
and possible follow-up road segments (C->D and C->E
in the example). Note that C, D, and E represent the
intersection names connected through segments. The
user can select the desired routing option by pressing
the button for the respective follow-up segment.
Figure 6: Vehicle route choice.
Figure 7 shows the input dialog for demand
pickup decisions, which pops up when a vehicle ar-
rives at the pickup location of an appeared and un-
served demand. It provides the vehicle name (U in the
example), demand data (i.e. pickup location, earliest
pickup time, dropoff location as well as latest dropoff
time), and two choice buttons (i.e. yes and no).
Figure 7: Demand pickup choice.
Figure 8 shows the input dialog for vehicle charg-
ing decisions, which pops up when a vehicle arrives
at the location of an unoccupied charging station. The
dialog provides the name of the vehicle (U in the ex-
ample), the location of the charging station (A->B:50
in the example), and the buttons for the two avail-
able choices (i.e. yes and no). Finally, the strategy al-
Figure 8: Vehicle charging choice.
ways selects the maximum driving speed for each ve-
hicle without considering possible collisions and al-
ways chooses to fully charge vehicle batteries after
the user decided to start the charging process.
4.2.2 Random Control Strategy
The random control strategy uses a random number
generator for making routing, demand pickup, and
charging decisions. For each decision, it assigns equal
probabilities to available choices (i.e. outgoing seg-
ments of intersections or yes and no). Driving speed
and target battery charge level are handled equally to
the manual control strategy.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
238

4.2.3 Greedy Control Strategy
The greedy control strategy determines routing deci-
sions upon vehicle arrival at intersections of the driv-
ing infrastructure. Its logic comprises four rules being
sequentially processed until one rule applies:
1. When the battery of the vehicle is only half full
or less, the strategy randomly selects an outgoing
road segment with charging station if such seg-
ment is available.
2. Then, when the vehicle carries one or more de-
mands, the strategy randomly selects the drop-off
segment of one such demand if reachable directly
via the intersection.
3. Next, when the vehicle carries no demand, the
strategy randomly selects the pick-up segment of
an unserved demand if reachable directly via the
intersection.
4. Finaly, when none of the above three rules apply,
the strategy randomly selects any of the outgoing
road segments of the current intersection with uni-
form probability distribution.
Note that the desribed routing logic only considers
the next segment and does not perform a look-ahead
across more segments. Finally, the greedy control
strategy always chooses to pick up demands or charge
vehicle batteries if arriving at an unserved demand
pick-up location or charging station. The strategy al-
ways chooses to drive at maximum speed and fully
charge batteries if a charging process has started.
4.2.4 Smart Control Strategy
The smart control strategy uses a more sophisticated
strategy for determining routing decisions upon vehi-
cle intersection arrivals. Its logic comprises four rules
being sequentially processed until one rule applies:
1. When the vehicle carries one or more demands
and a charging station can be reached via their
drop-off location, the segment leading to the clos-
est such demand is selected.
2. When the vehicle carries no demands and a charg-
ing station can be reached via the pick-up location
of an unserved demand, the segment leading to the
closest such demand is selected.
3. When the vehicle carries no demands and does not
plan to pick-up a new demand, the segment lead-
ing to the closest charging station is selected if
reachable with the remaining battery level.
4. Finally, when none of the above three rules ap-
ply, again the strategy randomly selects any of the
outgoing road segments of the current intersection
with uniform probability distribution.
When arriving at an unused charging station, this
strategy only starts charging if no other charging sta-
tion can be reached with the current battery level.
When the charging station is occupied, but no other
charging station can be reached, the strategy lets the
vehicle wait at the station to become free. With this
strategy vehicles always pick up unassigned demands
when passing by, charge their batteries fully when at
charging stations, and drive with maximum speed.
4.3 Data Recorder
During simulation, a number of events are recorded
for visualization of system (and control strategy) per-
formance as well as strategy training. Figure 9 shows
the provided methods of the data recorder interface.
Figure 9: Data recorder interface.
The recorder tracks, when a vehicle crosses an in-
tersection, and records associated routing decisions of
the control strategy. It tracks, when a vehicle passes
by an unassigned demand and the control strategy de-
clines or accepts the pick up. Similarly, the recorder
tracks, when a vehicle drops off a demand at its tar-
get location. Furthermore, it continuously tracks the
speed and overall travel distance of vehicles and size
of time steps made during discrete event simulation.
Currently, we use data about intersection crossing
for determining driving infrastructure bottlenecks and
data about pick ups and drop offs for determining per
demand waiting and driving time as well as delays.
4.4 Simulation Engine
The simulation engine computes event times, dele-
gates control decisions to the control strategy, up-
dates model state, and dispatches relevant data to the
recorder. It employs a simulation loop, which ad-
vances the model time and updates the model state
until no more events are to be processed. The simula-
tion loop can be divided into three main steps:
Step 1. Make routing decisions and update vehi-
cle locations. Make charging decisions and update
connections between vehicles and charging stations.
Make pick up decisions, perform drop offs (also if ve-
hicle battery empty), and update connections between
Next-Generation Design Tools for Intelligent Transportation Systems
239

vehicles and demands. Make speed decisions and up-
date vehicle speeds.
Step 2. Compute time of next event to be processed:
Determine speed update timeout, charging speed up-
date or charging station disconnect timeout, intersec-
tion arrival, charging station arrival, vehicle battery
empty/full, demand appearance, demand overdue, de-
mand pick up / drop off location arrival, and vehicle
attach / detach.
Step 3. Based on current time and time until next
event do the following: Update vehicle locations, ve-
hicle battery levels, and record travelled distances of
vehicles. Detect vehicle collisions based on their lo-
cation, width, and overlaps along the segment line.
Finally, set model time to time of next event.
4.5 Specific Applications
Based on the previous components we implemented
two specific applications: The first application can be
used for comparing the performance of different con-
trol strategies (see Section 4.5.1). The second appli-
cation can be used for comparing the performance of
different driving and charging infrastructures as well
as fleet configurations (see Section 4.5.2).
4.5.1 Control Strategy Comparison
To compare different control strategies, we apply
them to the same system configuration (including
driving / charging infrastructure as well as fleet setup)
and scenario (i.e. demand profile). For performance
evaluation, we measure the times between demand
appearances at the pick up location and subsequent
disappearances at the drop off location. Figure 10
shows an example system configuration, where ran-
dom, greedy, and smart control strategies are applied.
The upper part of the window shows for each con-
trol strategy the current system state including the ve-
hicle locations and the active demands. The lower
part of the window shows for each control strategy the
total times that have passed between demand appear-
ances and their respective disappearances. From the
diagram we can deduct that in this simulation run the
smart control strategy showed superior performance
over the others. Note that due to strategy randomness,
the result might differ in a proceeding run.
4.5.2 System Configuration Comparison
To compare system configurations, we instead apply
the same control strategy and scenario (i.e. demand
Figure 10: Control strategy comparison.
profile) to different versions of the driving / charg-
ing infrastructure as well as fleet setup. Note that dif-
fering infrastructure versions might include additional
road segments not present in others and thus require
that demands only reference road segments, which are
included in every version. Figure 11 shows an exam-
ple of such system configuration comparison. Again,
Figure 11: System configuration comparison.
the upper window part shows for each control strategy
the current system state including vehicle locations
and demands. The lower window part shows the to-
tal times between demand appearance and disappear-
ance for each system configuration. In this simula-
tion run, the configuration in the middle, which adds
only one additional road segment, has the best perfor-
mance. The example demonstrates that the smart con-
trol strategy may not always deliver optimal results,
which is necessary for fair infrastructure comparison.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
240

5 CONCLUSION
In this work, we described a design tool for a model-
and simulation-based systems engineering framework
for capturing design decisions and evaluating static
and dynamic properties for ITS design. In addition to
capturing different design decisions, users can guide
design decisions by systematic comparison and eval-
uation of system configuration and control strategies.
Application results demonstrate the feasibility of the
design tool for verification of ITS design decisions
with respect to static and dynamic system properties.
REFERENCES
Ascher, D. and Hackenberg, G. (2015). Integrated trans-
portation and power system modeling. In 2015 Inter-
national Conference on Connected Vehicles and Expo
(ICCVE), pages 379–384.
Ascher, D. and Hackenberg, G. (2016). The transp-0 frame-
work for integrated transportation and power system
design. In 2016 IEEE 19th International Conference
on Intelligent Transportation Systems (ITSC), pages
945–952.
Ascher, D. and Hackenberg, G. (2017). The passenger ex-
tension of the transp-0 system design framework. In
2017 5th IEEE International Conference on Models
and Technologies for Intelligent Transportation Sys-
tems (MT-ITS), pages 256–261.
Ascher, D. and Hackenberg, G. (2023). A discrete event for-
malism for fast simulation of on-demand transporta-
tion systems. In International Conference on Intel-
ligent Systems Design and Applications, pages 185–
197. Springer.
Ascher, D., Hackenberg, G., and Albayrak, S. (2023).
Model-based design of integrated transportation sys-
tems using approximate dynamic programming. In
2023 IEEE 26th International Conference on Intel-
ligent Transportation Systems (ITSC), pages 4443–
4450.
Barcel
´
o, J. and Casas, J. (2005). Dynamic network simula-
tion with aimsun. In Simulation approaches in trans-
portation analysis, pages 57–98. Springer.
Bellman, R. (1957). Dynamic Programming. Princeton
University Press, New Jersey.
Brake, J., Nelson, J. D., and Wright, S. (2004). Demand re-
sponsive transport: towards the emergence of a new
market segment. Journal of Transport Geography,
12(4):323–337.
Ericsson, E., Larsson, H., and Brundell-Freij, K. (2006).
Optimizing route choice for lowest fuel consumption–
potential effects of a new driver support tool. Trans-
portation Research Part C: Emerging Technologies,
14(6):369–383.
Fagnant, D. J. and Kockelman, K. M. (2014). The travel
and environmental implications of shared autonomous
vehicles, using agent-based model scenarios. Trans-
portation Research Part C: Emerging Technologies,
40:1–13.
Fellendorf, M. (1994). VISSIM: A microscopic simulation
tool to evaluate actuated signal control including bus
priority. In 64th Institute of Transportation Engineers
Annual Meeting, volume 32. Springer.
Furuhata, M., Dessouky, M., Ord
´
o
˜
nez, F., Brunet, M.-E.,
Wang, X., and Koenig, S. (2013). Ridesharing: The
state-of-the-art and future directions. Transportation
Research Part B: Methodological, 57:28–46.
Gianni, D., D’Ambrogio, A., and Tolk, A. (2014). Modeling
and simulation-based systems engineering handbook.
CRC Press.
Harris, I., Wang, Y., and Wang, H. (2015). Ict in multimodal
transport and technological trends: Unleashing poten-
tial for the future. International Journal of Production
Economics, 159:88 – 103.
Hu, J., Morais, H., Sousa, T., and Lind, M. (2016). Electric
vehicle fleet management in smart grids: A review of
services, optimization and control aspects. Renewable
and Sustainable Energy Reviews, 56:1207–1226.
Huang, Y., Ng, E. C., Zhou, J. L., Surawski, N. C., Chan,
E. F., and Hong, G. (2018). Eco-driving technology
for sustainable road transport: A review. Renewable
and sustainable energy reviews, 93:596–609.
Jia, D., Lu, K., Wang, J., Zhang, X., and Shen, X. (2015).
A survey on platoon-based vehicular cyber-physical
systems. IEEE communications surveys & tutorials,
18(1):263–284.
Kopelias, P., Demiridi, E., Vogiatzis, K., Skabardonis,
A., and Zafiropoulou, V. (2020). Connected & au-
tonomous vehicles–environmental impacts–a review.
Science of the total environment, 712:135237.
Lopez, P. A., Behrisch, M., Bieker-Walz, L., Erdmann, J.,
Fl
¨
otter
¨
od, Y.-P., Hilbrich, R., L
¨
ucken, L., Rummel, J.,
Wagner, P., and Wießner, E. (2018). Microscopic traf-
fic simulation using SUMO. In 2018 21st Interna-
tional Conference on Intelligent Transportation Sys-
tems (ITSC), pages 2575–2582. IEEE.
Namoun, A., Tufail, A., Mehandjiev, N., Alrehaili, A.,
Akhlaghinia, J., and Peytchev, E. (2021). An eco-
friendly multimodal route guidance system for urban
areas using multi-agent technology. Applied Sciences,
11(5):2057.
Powell, W. B. (2007). Approximate Dynamic Program-
ming: Solving the Curses of Dimensionality. John
Wiley & Sons.
W Axhausen, K., Horni, A., and Nagel, K. (2016). The
multi-agent transport simulation MATSim. Ubiquity
Press.
Wang, B., Han, Y., Wang, S., Tian, D., Cai, M., Liu, M., and
Wang, L. (2022). A review of intelligent connected
vehicle cooperative driving development. Mathemat-
ics, 10(19):3635.
Zhang, R. and Fujimori, S. (2020). The role of trans-
port electrification in global climate change miti-
gation scenarios. Environmental Research Letters,
15(3):034019.
Next-Generation Design Tools for Intelligent Transportation Systems
241
