
Learning to Run a Marathon: Avoid Overfitting to Speed
Kriszti
´
an G
´
abrisch
a
and Istv
´
an Megyeri
b
University of Szeged, Dugonics Square 13, Szeged, 6720, Hungary
Keywords:
Reinforcement Learning, Robustness, Humanoid, Walker2D, Hopper.
Abstract:
Research and development in reinforcement learning is a dynamically evolving field, with a particular focus
on robustness and continuous optimization of reward. The models learned in the OpenAI GYM and Mujoco
environments investigated here seek to make different dummies move in one direction as fast as possible
without losing stability. During the learning process, the models are usually trained for a predefined number
of steps, which can act as a limiting factor and result in an unexpected limitation in the model performance.
This iteration limitation can contribute to model instability, often leading to model failure, thus hindering
the model’s ability to collect additional rewards. In our observations, we also note that models face a major
problem in simultaneously optimizing their stability and speed. We traced the learning process of the models
through twenty checkpoints, and defined various metrics to select the models that are most suitable for us.
We have noticed that the model obtained at the last checkpoint does not always perform the best, so it is
worth monitoring the learning process so we can get better models during the learning process. Our code and
pretrained models are available at https://github.com/szegedai/rl run marathon.
1 INTRODUCTION
Reinforcement Learning (RL) has seen significant ad-
vances in recent years, marked by impressive suc-
cesses in various domains. Applications such as
mastering complex games (e.g., AlphaGo and Ope-
nAI’s Dota 2 agents) and autonomous robotics control
demonstrate RL’s potential to handle highly dynamic
and complex environments effectively. These devel-
opments have been driven in part by the emergence
of deep learning-based algorithms that offer improved
learning efficiency and performance, such as Trust
Region Policy Optimization(TRPO) (Schulman et al.,
2017a), Proximal Policy Optimization (PPO) (Schul-
man et al., 2017b) and Smoothed Proximal Policy
Optimization (SPPO) (Sun et al., 2024). These al-
gorithms seek to strike a balance between exploration
and exploitation, offering better policy updates within
the constraints of non-linear approximators like neu-
ral networks.
While TRPO and PPO have improved sample ef-
ficiency and stability compared to earlier methods,
their complexity presents challenges. For example,
TRPO requires complex second-order derivatives,
making it computationally expensive. PPO improves
a
https://orcid.org/0009-0005-3909-2218
b
https://orcid.org/0000-0002-7918-6295
upon this by simplifying the optimization process
while ensuring stability. Despite these advancements,
further refinements are needed, especially when con-
fronted with adversarial environments.
Recently, research has shifted focus to adver-
sarial robustness in RL. Adversarial training meth-
ods, such as stochastic gradient Langevin dynam-
ics (SGLD) (Sun et al., 2024) and adversarially-
augmented PPO (SAPPO) (Zhang et al., 2020) and
Worst-Case-Aware PPO (WocaR-PPO) (Liang et al.,
2022), seek to mitigate vulnerabilities to adversar-
ial perturbations. These methods focus on enhanc-
ing model stability and robustness against adversarial
examples, which can dramatically affect the perfor-
mance of RL policies in real-world settings.
In this study, we address a specific shortcoming in
the current training processes of RL policies. Many
policies tend to overfit speed during training, which
leads to higher rewards. However, this often results in
degraded model stability towards the end of the train-
ing phase. Here, we defined stability as the distance
taken by an agent before a fall and observed a mis-
match between speed and stability during the train-
ing. To overcome this problem, we propose a novel
model selection approach that takes into account mul-
tiple metrics, such as speed, distance taken to fall, and
time taken to fall, and ensures a more balanced model
selection.
Gábrisch, K. and Megyeri, I.
Learning to Run a Marathon: Avoid Overfitting to Speed.
DOI: 10.5220/0013186200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 829-836
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
829
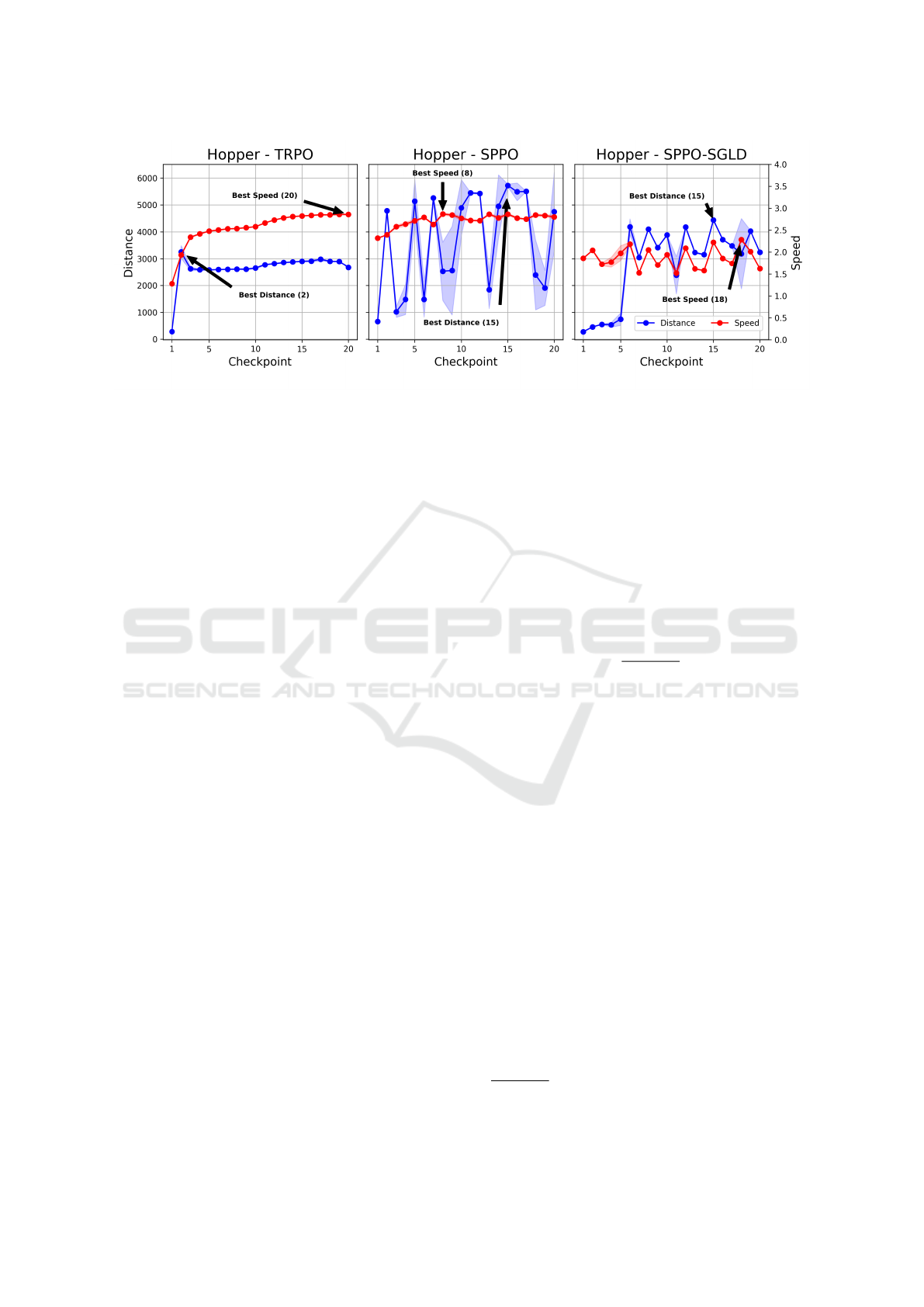
Figure 1: Distance to fall and speed is displayed as the function of hopper model checkpoints for TRPO,SPPO and SPPO-
SGLD algorithm. The checkpoints are evaluated using 100 seeds and average score and standard deviation are displayed.
There is a noticeable mismatch between the two metrics for all the algorithms. The model tends to optimize only speed and
distance can be unstable during training.
Furthermore, we advocate increasing the environ-
ment step limit during training to strengthen the mod-
els and improve long-term performance. This point
is typically unexplored and set to a predefined fixed
number. By extending the training horizon and us-
ing more robust evaluation metrics, we attempt to en-
hance the stability of RL models, ensuring that they
remain effective even in more complex and adversar-
ial environments.
Here, we describe the overfitting to speed for three
algorithms TRPO, SPPO, and SPPO-SGLD, which is
also shown by the learning curve of the Hopper en-
vironment in Fig. 1. Then, we demonstrate improved
stability via a novel data collection using dynamic en-
vironment step limits to simulate longer runs, while
adjusting the number of episodes and the batch size at
the same time so the compute, memory requirement,
and running time remain the same. We also applied
our new data collection technique on the SPPO algo-
rithms, but in this case it did not yield any improve-
ment, however with a good model choice, for which
we used three different metrics, we can obtain a model
with a more robust performance than that got at the
last state of the training.
2 POLICY OPTIMIZATION
In this section, we review the TRPO and SPPO al-
gorithms that we shall use as baselines in our exper-
iments. Then, we describe the proposed heuristics
used to modify episode number and environment step
limit during training.
2.1 Baseline Methods
Trust Region Policy Optimization (TRPO) is a policy
optimization algorithm used in reinforcement learn-
ing (RL). It seeks to improve the stability and per-
formance of policy updates by ensuring that the new
policy stays within a ”trust region” of the old policy,
hence avoiding large, destabilizing policy updates.
TRPO optimizes the policy by solving the follow-
ing constrained optimization problem:
max
θ
E
s∼π
θ
old
π
θ
(a|s)
π
θ
old
(a|s)
A
π
θ
old
(s,a)
(1)
E
s∼π
θ
old
KL
π
θ
old
(a|s)∥π
θ
(a|s)
≤ δ (2)
Here, θ represents the policy parameters, π
θ
(a|s) is
the probability of taking action a in state s under pol-
icy π
θ
, and A
π
θ
old
(s,a) is the advantage function. The
KL divergence term ensures that the new policy does
not deviate significantly from the old policy by re-
stricting the change in policy within a small step δ.
TRPO’s constraint-based approach provides that
policy changes are smooth, making it more reliable
for tasks where large policy updates might lead to per-
formance collapse. The algorithm is often applied in
continuous action spaces and high-dimensional prob-
lems. However, the constrained problem requires us-
ing second-order methods and this might be unsuit-
able for deep neural networks. A more practical so-
lution is to transform the constraint into the objective
via a penalization term. The new penalized TRPO ob-
jective is shown in Eq. (3).
max
θ
E
s∼π
θ
old
π
θ
(a|s)
π
θ
old
(a|s)
A
π
θ
old
(s,a) −βKL
π
θ
old
(a|s)∥π
θ
(a|s)
(3)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
830
Table 1: Major hyperparameters are shown for SPPO and TRPO algorithms an the three training methods. Note, the batch
size, episodes and max iteration changes in a way that the amount of data seen by the three training methods are comparable.
Algorithm ENV Hyper parameter
Training methods
Baseline Static Dynamic
TRPO All Env Batch Size(episode) 20 20/10 160/80/40/20/10/5
Hopper Training length 30 ×10
3
ep 15/7.4 ×10
3
ep 21.8 ×10
6
it
Env Max Iter 10
3
1/2 ×10
3
125/.../4000
Update Steps 1.5 ×10
3
Walker2d
Training length 25.2 ×10
3
ep 12.4/6 ×10
3
ep 21.3 ×10
3
it
Env Max Iter 10
3
1/2 ×10
3
125/.../4000
Update Steps 1.26 ×10
3
Humanoid
Training length 20 ×10
4
ep 10/5 ×10
4
ep 150 ×10
3
it
Env Max Iter 10
3
1/2 ×10
3
125/.../4000
Update Steps 10
4
SPPO Hopper
Batch Size(iteration) 2048 - 2048
Episodes 0.96 ×10
3
ep - 0.96 ×10
3
ep
Env Max Iter 10
3
- 20 ×10
3
Update Steps 0.96 ×10
3
β is a hyperparameter that controls the
strength of the KL divergence penalty. The term
KL
π
θ
old
(a|s)∥π
θ
(a|s)
ensures that large updates
to the policy (large KL divergence) are penalized,
encouraging smoother updates similar to the original
TRPO’s constraint.
In this penalized version, instead of using a hard
constraint on the KL divergence, we penalize devia-
tions directly in the objective function by scaling the
KL divergence term with β. This makes the optimiza-
tion process simpler and allows us to balance between
policy improvement and policy stability.
Proximal Policy Optimization (PPO) is a simpli-
fied alternative to TRPO that improves efficiency by
removing the need to solve a constrained optimiza-
tion problem. Instead, PPO uses a clipped surrogate
objective to limit the change in policy at each update,
effectively mimicking the trust region concept with-
out complex computations.
The PPO objective is defined as follows:
max
θ
E
s∼π
θ
old
[min
r(θ)A
π
θ
old
(s,a),
clip(r(θ), 1 −ε, 1 + ε)A
π
θ
old
(s,a)
] (4)
where r(θ) =
π
θ
(a|s)
π
θ
old
(a|s)
is the probability ratio between
the new and old policies, and ε is a hyperparameter
that controls the clipping range. The clipped term
ensures that the update does not excessively shift the
policy, avoiding large jumps.
PPO simplifies the optimization process and re-
duces computational overhead while yielding a simi-
lar performance to TRPO. It is widely used in various
RL applications due to its balance of simplicity and
effectiveness.
2.2 Modify Episode Number and
Environment Limit During Training
In the baseline methods, a fixed environment limit and
a fixed number of episodes are collected for model
updates. This way, we can have a suitably controlled
amount of training samples and budget compute with
a simple implementation. However, for robust and
stable models we shall define a more appropriate data
collection method. We shall define two simple heuris-
tics, to test our hypotheses which can collect the same
amount of data as our baseline methods so that they
have a comparable compute cost.
Static. The static models were run with the baseline
settings until half of the training, then in the subse-
quent phase we halved the batch size and doubled the
iteration limit, and in the second phase of training,
we trained until we had nearly half of the remaining
episode numbers, all to guarantee that the required re-
sources did not deviate from the baseline models. We
hiphotetize that the model trained in the longer run but
with fewer episodes can achieve similar speed and is
more stable.
Dynamic. The dynamic models started their learning
process with an iteration limit of 125 and a batch size
of 160. As 2/3 of the episodes in a batch reached its it-
eration limit, we halved the batch size and doubled the
iteration limit. By doing this with the same resource
requirements, we were able to show that our model
runs longer and dynamically increases the problem
complexity as the model improves. The list of the
batch sizes used and iteration limits are given in Ta-
ble 2.
Learning to Run a Marathon: Avoid Overfitting to Speed
831

Table 2: Dynamic models episode and iteration number
scaling. When the iteration limit has been reached in 2/3
of the given number of episodes, we move to the next state,
thus increasing the iteration limit during the learning pro-
cess.
State ID Batch Size Iteration
1 160 125
2 80 250
3 40 500
4 20 1000
5 10 2000
6 5 4000
SPPO-dynamic The baseline models were trained
over 960 episodes on a 1000 iteration bound and up-
dated every 2048 iterations. By comparison, the dy-
namic models changed to the extent that they were
allowed a total of 20,000 iterations on the environ-
ment, provided there were no loss in stability before
we reset the environment. Since the algorithm up-
dates the model every 2048 iterations, we did not need
to change any other parameters values.
The three training methods and the corresponding
hyperparameters are shown in Table 1 for each given
environment. The hyperparameters controlling data
collection were selected in a way so that the GPU,
CPU, memory, and time requirements did not change
during training compared to the baseline. However,
the evaluations need for model selection take signif-
icantly more time. For example, SPPO models eval-
uations were conducted across 100 seeds, each with
a 2000-iteration limit. In contrast, training runs for 2
million iterations and includes backward passes, ef-
fectively doubling the computational load compared
to evaluations, which involve only forward passes.
3 ROBOTIC CONTROL
ENVIRONMENTS
We shall look at three environments, which are de-
scribed in this section. The selected models had to
easily fall so stability could be easily measured and
the model do not get stuck in a state where it was not
moving anywhere, but just trying to avoid falling. For
example, in the Ant environment, the model was stuck
and couldn’t move because of its four legs. To have a
more representative evaluation, we selected the envi-
ronments to represent different levels of complexity.
Out of the environments listed here, in terms of
complexity, the Humanoid environment is the most
complex, with a high-dimensional action space and
an extremely large observation space, requiring ad-
vanced policies for control and balance. The Hop-
per is the simplest, featuring a low-dimensional ac-
tion space and a small observation space, making it
suitable for basic control tasks. The Walker2d falls
in between, with moderate complexity due to action
space and observation space, balancing controllabil-
ity and challenge.
3.1 Hopper
The environment described is based on (Durrant-
Whyte et al., 2012). The study focuses on increas-
ing the number of independent state and control vari-
ables compared to traditional control environments.
The model represents a two-dimensional hopper with
a single leg, composed of four main body parts: the
torso, thigh, leg, and foot. The objective is to perform
forward-moving hops by applying torques to the three
hinges that connect these body parts.
The action space has three dimensions and is con-
tinuous in the range of [−1, 1] where the three values
represent the torques applied at the hinges. Obser-
vations consist of the positional values of the hop-
per’s body parts, followed by the velocities of these
parts. The entire observation is a vector of an 11-
dimensional space with positions ordered before ve-
locities.
3.2 Walker2D
This environment is an extension of the hopper envi-
ronment (Durrant-Whyte et al., 2012). Here, a two-
legged robot is introduced, allowing it to walk for-
ward instead of hop. Similar to other Mujoco envi-
ronments, it aims to increase the number of indepen-
dent state and control variables compared to classic
control setups.
The walker is a two-dimensional figure with a sin-
gle torso at the top, two thighs, two legs, and two feet.
The task is to coordinate the legs and feet to move for-
ward by applying torques to the six hinge joints con-
necting the body parts. The action space is continuous
and has a range of [−1,1] with six values representing
torques. Observations include positional values of the
body parts followed by their velocities, organized into
a vector of a 17-dimensional space.
3.3 Humanoid
The humanoid enviroment (Tassa et al., 2012) fea-
tures a 3D bipedal robot designed to simulate human
motion. The robot has a torso with two arms and two
legs, where the arms and legs are composed of two
links each, representing the knees and elbows. The
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
832
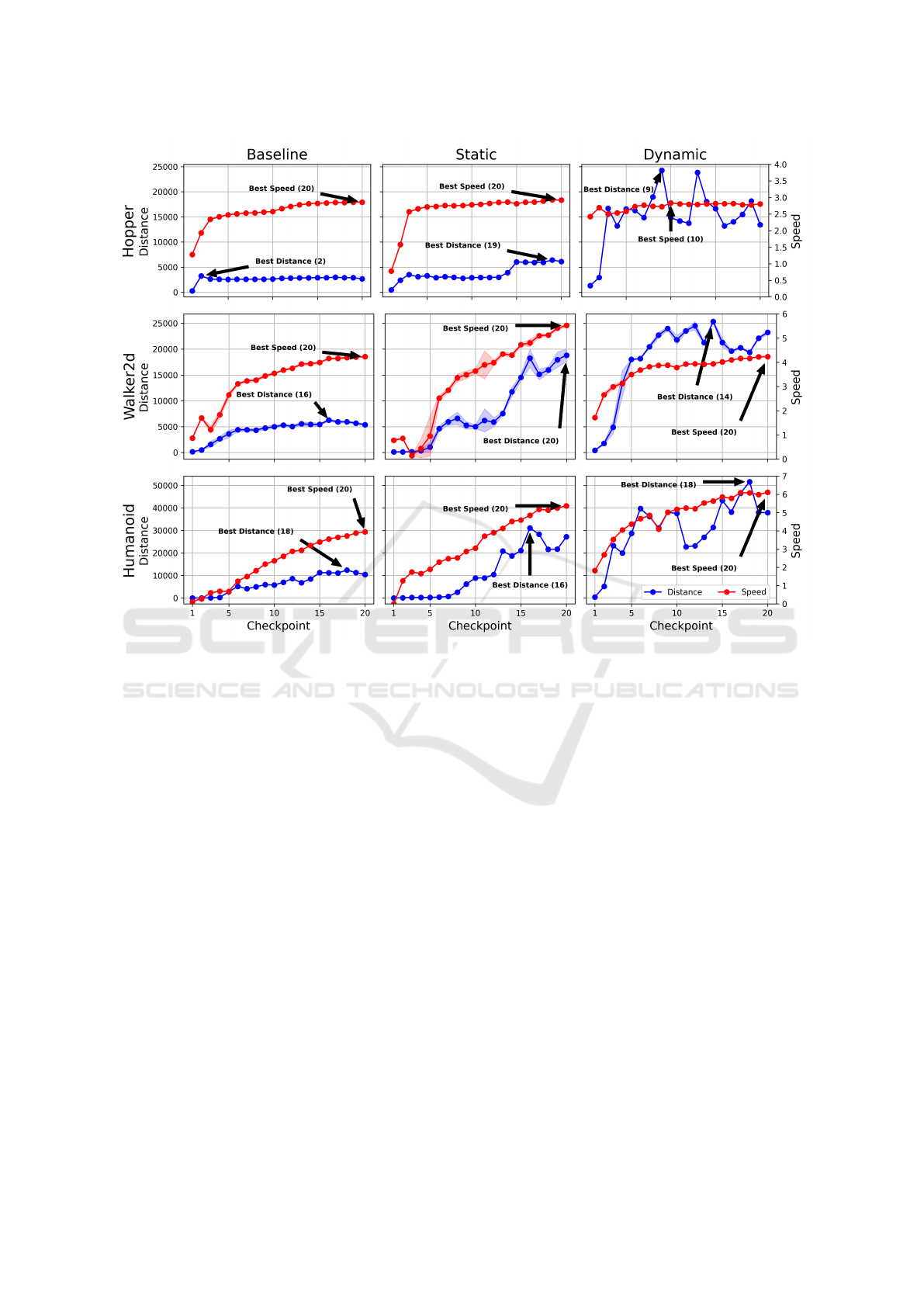
Figure 2: Hopper, Walker2D, and Humanoid checkpoints are displayed for all three training algorithms as distance vs speed.
Static and dynamic models are able to run a longer distances, in some cases speed is also improved.
objective is to walk forward as quickly as possible
without falling.
The action space is continuous and has a range of
[−1,1] with 17 values representing the torques ap-
plied to the robot’s hinge joints. Observations in-
clude positional data for various body parts, followed
by their velocities, organized into a 376-dimensional
vector.
3.4 MuJoCo
We used the 2.1.0 MuJoCo (Todorov et al., 2012)
version and python 3.8, using the robotics models
provided by OpenAI GYM, which defined the com-
plete environment and its basic functions, including
our stopping condition, reward function and observa-
tion space after each step. The reward function calcu-
lates the velocity based on the past and current posi-
tion on the x coordinate, scales this by a constant and
finally adds a healthy reward, which is a fixed value,
to reward the stability of the model.
The environments are physics-based simulations
set on flat terrains. We use the MuJoCo engine to
model realistic dynamics, including friction, gravity,
and collisions, enabling accurate simulation of rigid
bodies and joints. These environments are designed
for continuous control tasks, ideal for testing rein-
forcement learning algorithms in simulated physical
systems.
4 EXPERIMENTAL SETUP
In this section, we describe our training parameters
for the TRPO and SPPO algorithms. Then, we de-
scribe the process of checkpoints saving policy evalu-
ation and the used metrics to quantify the model per-
formances.
4.1 TRPO Training Hyper Parameters
The TRPO training and evaluation is based on the
repository from https://github.com/pat-coady/trpo.
During the training process, two neural networks
were optimized: policy and value function. The algo-
rithm was applied to the Hopper, Walker2d and Hu-
manoid environments.
Learning to Run a Marathon: Avoid Overfitting to Speed
833

The networks learning the policy and value func-
tion use random normal initializer and tanh activation
function. Each network has two hidden layers.
As policy’s training objective, we used Eq. (3)
augmented with a Hinge loss. In the two hidden layers
of the policy network, there are int(
√
d
o
∗10 ∗d
a
∗10)
and d
a
×10 neurons respectively, where d
o
and d
a
re-
fer to the dimensions of the observation and action
space.
For the value function network, the hidden lay-
ers have int(sqrt(d
o
×10 ×5)) and 5 neurons respec-
tively. We used a squared loss function and Adam
(Kingma and Ba, 2017) as optimizer. We also use
a replay buffer, which consists of the data collected
in the previous learning step. We concatenate this
with the training data, shuffle the data, and update the
model with it.
The learning rate heuristic was computed based on
the size of the neural network, which was tuned on the
Hopper-v1 environment:
9×10
−4
q
(int(
√
(d
o
×10)∗(d
a
×10)))
. We
used a dynamic learning rate schedule during train-
ing based on the optimized loss values. We also use a
discount factor of 0.995 to help us find new and possi-
bly better steps and maximise the longer-term reward
function. We use λ = 0.98 for Generalized Advantage
Estimation (GAE)(Schulman et al., 2016). For policy
update, we also use a kl
targ
= 0.003 value as the D KL
target in the loss function.
4.2 SPPO Training Hyper Parameters
The SPPO vanilla and SPPO-SGLD (Sun et al.,
2024) training and evaluation is based on the
repository from https://github.com/Trustworthy-ML-
Lab/Robust HighUtil Smoothed DRL.
We use the orthogonal initialization scheme from
OpenAI to initialize policy weights and use the tanh
activation function. As the optimizer, we use adam
with a 4 × 10
−4
learning rate initially and a linear
learning rate annealing. For loss calculation, we use
GAE-based loss for the value function. The network
has one hidden layer with size 64 neurons.
For the value function, we use the orthogonal ini-
tialization scheme from OpenAI to initialize weights
and use tanh activation function. For loss calculation,
we use a GAE-based loss. We use the adam optimizer
with a 3 ×10
−4
learning rate initially. Value function
has one hidden layer with size 64.
4.3 Checkpoint Saving
We aim to analyze the policy stability during the train-
ing process so we save 20 checkpoints from each
model training. For the TRPO baseline models at ev-
ery 1500th episode, we save the model weight. The
static models are saved every 1120th episode. Here,
the saving frequency is chosen in such a way that, the
total number of episodes was split into 20 equal parts.
The dynamic models were saved after every 1.12Mth
step taken on the environment. The frequency was
chosen to ensure 20 equal iterations parts of the train-
ing.
4.4 Policy Evaluation
Due to the high variability of the learned policy mod-
els for each algorithm, and for each type of envi-
ronment, 10 models were trained. We also save 20
checkpoints from each training. This allows us to ob-
serve how the performance of the models varied dur-
ing training and determine the best-performing ones
based on model selection. The models trained with
TRPO were evaluated on 10 seeds, and the models
trained with SPPO on 100 seeds. With TRPO the
evaluations had no iteration limit. With SPPO it was
set to 2,000 due to lack of resources and the stronger
model performances. The aggregation of the results is
the following, we averaged over the seeds and then se-
lected the best models based on model selection crite-
ria and reported the median value of the 10 best mod-
els.
4.5 Metrics
During our evaluations, we measured the model’s
speed and the number of steps taken. We also cal-
culate the taken distance by multiplying the steps and
speed. The speed reflects how fast the model is, but
might not capture the robustness. In contrast, the steps
and distance measure how long the model is able to
run or how far can it get before falling. These are
related to the model’s robustness. One might expect
that, the models robust against adversarial perturba-
tions achieve better scores on distance or steps.
4.6 Model Selection
To find the best-performing models, we introduced
twenty checkpoints during a training session and then
evaluated all the models. Three metrics were used for
evaluation steps, speed, and distance. We select the
best models according to each metric and also record
the last model. Ideally, the four models should be the
same. In practice, we obtain significant differences.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
834
Table 3: Speed and distance are shown for all three environments and training methods using the TRPO algorithm. The
columns represent the four model selection strategies. The static and dynamic models consistently outperform the baseline
models. The best checkpoint selection is crucial for maximum scores based on the preferred metric.
Metric Env Env limit
Selected Model
Last Model Best Step Best Speed Best Distance
Speed
hopper
baseline 2.8107 2.1049 2.8107 2.3806
static 2.8195 2.7736 2.8210 2.8074
dynamic 2.8007 2.7179 2.8163 2.7179
walker2d
baseline 5.1567 2.5868 5.2154 5.0879
static 5.7485 4.3084 5.7485 5.1927
dynamic 4.3783 3.9101 4.3783 4.0578
humanoid
baseline 3.9411 2.6147 3.9411 3.7202
static 5.6170 5.0548 5.6170 5.0548
dynamic 5.7378 4.6646 5.7431 4.9741
Distance
hopper
baseline 2861 3006 2913 3207
static 5944 5896 6021 6219
dynamic 13370 15773 13521 15773
walker2d
baseline 6856 4815 6891 7823
static 17622 14733 17622 18903
dynamic 25484 29616 26434 30282
humanoid
baseline 14212 9307 14212 14212
static 31951 31350 31951 34219
dynamic 37905 39754 36095 51577
Table 4: Speed and distance are shown for hopper environments and training methods using the SPPO algorithm. Columns
represent the four model selection strategies. Best checkpoint selection is crucial according to the preferred metric to maximize
scores.
Metric SPPO ENV limit
Selected model
Last Model Best Step Best Speed Best Distance
Speed
Vanilla
baseline 2.6181 2.5722 2.9189 2.8288
dynamic 2.9596 2.5563 2.9813 2.7954
SGLD
baseline 1.8508 1.7974 2.3070 2.2076
dynamic 1.8317 1.6463 2.2824 2.0942
Distance
Vanilla
baseline 2567 5088 1879 5630
dynamic 2093 5047 1660 5471
SGLD
baseline 3021 3595 2689 4396
dynamic 3298 3293 1937 4150
5 RESULTS
In Table 3, the speed and distance are shown for the
TRPO algorithm using the three training strategies
and the model selection methods. The static and dy-
namic models consistently surpass the baseline mod-
els for both speed and distance in all the environ-
ments. Notably, in terms of distance the static and
dynamic models increased by an order of magnitude
in some cases. For the humanoid, we can see a no-
ticeable improvement in speed.
The model selection criteria have also a strong im-
pact on the TRPO results. This is why the last model
is rarely the best. And the fastest models consistently
underperform in distance or vice-versa. This tells us
that the speed and distance are not optimized simulta-
neously.
The speed vs distance values plotted for each
checkpoint of a single model training in Fig. 2 for
the three environments. The dominance of the static
and dynamic training is clear over the baseline mod-
els. However, the model stability is a challenge for
them so model selection is essential to maximize the
scores.
In Table 4, the results of the SPPO algorithms are
shown. Here, we do not see any consistent improve-
ment in the dynamic training method. In contrast, the
model selection has once again a great effect and it
can significantly boost the distance and speed over the
last model. Further investigation and adaptation of the
Learning to Run a Marathon: Avoid Overfitting to Speed
835

dynamic strategy to the SPPO variants is the subject
of future work.
In Fig. 1, a single run of the hopper baseline mod-
els is displayed for all three policy optimization meth-
ods. The mismatch between distance and speed is qui-
ete apparent. Although, the two metrics are somewhat
better aligned for the SGLD method, the difference
between the best distance and best speed checkpoint
is substantial.
6 CONCLUSIONS
The robustness of RL models is receiving more at-
tention in the literature. In our study, we highlighted
a new shortcoming of the RL policies namely speed
and stability are not optimized simultaneously, and to
maximize speed, the model already starts to perform
worse in terms of stability in the initial stages of train-
ing. This phenomenon was present for all three en-
vironments and the three learning algorithms that we
evaluated here. The limitation is effectively addressed
by modifying the data collection strategy, which was a
key step in increasing the stability of the TRPO algo-
rithm. The modification of the data collection strategy
included a targeted adjustment of the batch size and it-
eration bounds so it ensure the compute requirements
are similar to the baseline method. Our approach also
made more optimal use of available resources than
the baseline method. Regardless of the data collection
method used, model selection is crucial to maximize
the model score and compensate for the high variance
of RL policies.
ACKNOWLEDGEMENTS
On behalf of the SZTE adversarial robustness ex-
periments project we are grateful for the possibility
to use HUN-REN Cloud (see (H
´
eder et al., 2022);
https://science-cloud.hu/) which helped us achieve the
results published in this paper.
REFERENCES
Durrant-Whyte, H., Roy, N., and Abbeel, P. (2012). Infinite-
horizon model predictive control for periodic tasks
with contacts. In Robotics: Science and Systems VII,
pages 73–80.
H
´
eder, M., Rig
´
o, E., Medgyesi, D., Lovas, R., Tenczer,
S., T
¨
or
¨
ok, F., Farkas, A., Em
˝
odi, M., Kadlecsik, J.,
Mez
˝
o, G., Pint
´
er,
´
A., and Kacsuk, P. (2022). The past,
present and future of the ELKH cloud. Inform
´
aci
´
os
T
´
arsadalom, 22(2):128.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
Liang, Y., Sun, Y., Zheng, R., and Huang, F. (2022). Ef-
ficient adversarial training without attacking: Worst-
case-aware robust reinforcement learning. In Koyejo,
S., Mohamed, S., Agarwal, A., Belgrave, D., Cho, K.,
and Oh, A., editors, Advances in Neural Information
Processing Systems, volume 35, pages 22547–22561.
Curran Associates, Inc.
Schulman, J., Levine, S., Moritz, P., Jordan, M. I., and
Abbeel, P. (2017a). Trust region policy optimization.
In Proceedings of the 34th International Conference
on Machine Learning. arXiv.
Schulman, J., Moritz, P., Levine, S., Jordan, M. I., and
Abbeel, P. (2016). High-dimensional continuous con-
trol using generalized advantage estimation. In Ben-
gio, Y. and LeCun, Y., editors, 4th International Con-
ference on Learning Representations, ICLR 2016, San
Juan, Puerto Rico, May 2-4, 2016, Conference Track
Proceedings.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017b). Proximal policy optimization al-
gorithms. CoRR, abs/1707.06347.
Sun, C.-E., Gao, S., and Weng, T.-W. (2024). Breaking the
barrier: Enhanced utility and robustness in smoothed
drl agents. In Proceedings of the 2024 International
Conference on Artificial Intelligence and Learning.
arXiv.
Tassa, Y., Erez, T., and Todorov, E. (2012). Synthesis and
stabilization of complex behaviors through online tra-
jectory optimization. In 2012 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
4906–4913.
Todorov, E., Erez, T., and Tassa, Y. (2012). Mujoco:
A physics engine for model-based control. In 2012
IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 5026–5033.
Zhang, H., Chen, H., Xiao, C., Li, B., Liu, M., Boning, D.,
and Hsieh, C.-J. (2020). Robust deep reinforcement
learning against adversarial perturbations on state ob-
servations. In Larochelle, H., Ranzato, M., Hadsell,
R., Balcan, M., and Lin, H., editors, Advances in Neu-
ral Information Processing Systems, volume 33, pages
21024–21037. Curran Associates, Inc.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
836
