
Minimizing Number of Distinct Poses for Pose-Invariant Face
Recognition
Carter Ung, Pranav Mantini and Shishir K. Shah
Department of Computer Science, University of Houston, Houston, TX, U.S.A.
{ctung, sshah5, pmantini}@uh.edu
Keywords:
Face Recognition, Computer Vision.
Abstract:
In unconstrained environments, extreme pose variations of the face are a long-standing challenge for person
identification systems. The natural occlusion of necessary facial landmarks is notable to model performance
degradation in face recognition. Pose-invariant models are data-hungry and require large variations of pose in
training data to achieve comparable accuracy in recognizing faces from extreme viewpoints. However, data
collection is expensive and time-consuming, resulting in a scarcity of facial datasets with large pose variations
for model training. In this study, we propose a training framework to enhance pose-invariant face recognition
by identifying the minimum number of poses for training deep convolutional neural network (CNN) models,
enabling higher accuracy with minimum cost for training data. We deploy ArcFace, a state-of-the-art recog-
nition model, as a baseline to evaluate model performance in a probe-gallery matching task across groups of
facial poses categorized by pitch and yaw Euler angles. We perform training and evaluation of ArcFace on
varying pose bins to determine the rank-1 accuracy and observe how recognition accuracy is affected. Our
findings reveal that: (i) a group of poses at -45
◦
, 0
◦
, and 45
◦
yaw angles achieve uniform rank-1 accuracy
across all yaw poses, (ii) recognition performance is better with negative pitch angles than positive pitch an-
gles, and (iii) training with image augmentations like horizontal flips results in similar or better performance,
further minimizing yaw poses to a frontal and
3
4
view.
1 INTRODUCTION
Face recognition, widely known as a classic computer
vision task, represents a long-standing research area
that has grown in interest in recent years due to the
developments of powerful deep convolutional neural
networks (CNNs) (Taigman et al., 2014; Deng et al.,
2019; Yin and Liu, 2018). While CNNs have proved
to saturate accuracy in large face datasets, these feats
are primarily restricted to images dominated by the
frontal profile of the face. In real-world surveillance
systems, captured faces can result in extreme orien-
tations of the face due to the camera-to-subject per-
spective (Cheng et al., 2018). In these unconstrained
scenarios where camera viewpoints and head orienta-
tion vary, the head pose of a person presents a natural
self-occlusion of the face, leading to poor model per-
formance for facial matching tasks (Zhang and Gao,
2009; Ahmed et al., 2019). Fig. 1 introduces the ro-
tational angles that define head orientation and how
extreme profile views lead to self-occlusion.
Several works have attempted to tackle pose-
invariant challenges in face recognition (Asthana
et al., 2011; Masi et al., 2016; Prince and Elder, 2006;
Yin and Liu, 2018), however, the proposed models
are often data-hungry and require diverse training data
incorporating uniform distribution across pitch and
yaw pose ranges to yield comparable results in fa-
cial matching tasks (Baltanas et al., 2021; Yin et al.,
2019). As data collection presents a time-consuming
and expensive process, the availability of meaning-
ful training data for face recognition is limited (Chen
et al., 2018). This is also true for the deployment of a
trained face recognition system where rather limited
poses are available for a subject to be enrolled in the
gallery. Pivotal work has been explored in the M2FPA
dataset introduced by Li et al. (Li et al., 2019), where
the distribution of facial poses improves upon previ-
ous pose-aware benchmarks by providing abundant
images across 66 pitch-yaw angles. However, their
study did not evaluate unique combinations of poses
for training and inference to analyze the complete
model behavior across pitch and yaw. We expand
on their study using their M2FPA dataset to study
model behavior in pose-occluded face recognition
tasks.
Ung, C., Mantini, P. and Shah, S. K.
Minimizing Number of Distinct Poses for Pose-Invariant Face Recognition.
DOI: 10.5220/0013186400003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
447-455
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
447

(a) Pitch, Yaw, Roll (b) Self-Occlusion Due to Pose
Figure 1: (a) Head pose is defined by three rotational Eu-
ler angles - pitch, yaw, and roll, (b) Faces captured at profile
angles occlude the lateral side of the face, limiting discrimi-
native features like eyes, cheek, and jawline (Li et al., 2019).
Addressing excessive data collection efforts, our
aim is to identify a minimum number of poses needed
in the gallery for each subject for uniform recogni-
tion across the face’s 3D rotational plane. Building
upon related works (Favelle and Palmisano, 2018;
Bruce et al., 1987; Deng et al., 2019), our work is
two-fold. First, we explore the empirical relationship
between face recognition and pose discrepancies re-
lated to model performance. Here, we base our eval-
uation on experimental questions identifying (i) the
minimal set of yaw angles in the gallery that ensures
uniform recognition across all poses, (ii) the pitch an-
gles combined with the optimal yaw set to optimize
model performance, and (iii) whether synthetic pose
augmentations can replace real poses while maintain-
ing or improving recognition accuracy. We choose
M2FPA (Li et al., 2019) for our extensive evaluation
across the full natural range of yaw and pitch. We an-
alyze face-matching accuracy during model inference
from a set of facial poses containing unique pitch-
yaw angles. Our key observations are generated by
ablating key poses from current pose sets to gradu-
ally minimize the number of poses for the next pose
set being evaluated. For example, given a set of an-
gles between −90
◦
and 90
◦
, we decrement the num-
ber of poses in each iteration to validate the presence
of degradation within the matching accuracy. Second,
we propose a data selection protocol that determines
the set of poses that are integrated into the training set
and gallery for probe-gallery face matching. Follow-
ing our pose ablation analysis, we optimize our mini-
mized set of pitch-yaw angles by leveraging geomet-
ric pose augmentation techniques to replace mirrored
faces with synthetic poses. Here, we achieve uniform
recognition by filtering pose to only frontal and a
3
4
view within training and gallery enrollment. We eval-
uate our results by fine-tuning pose sets against a pre-
trained ArcFace (Deng et al., 2019) model contain-
ing an iResNet-50 (Duta et al., 2021) CNN backbone.
Our findings alleviate the current bottlenecks for data
collection and provide guidance towards optimizing
facial matching accuracy across any pose while min-
imizing required 2D poses per subject in the gallery
enrollment, facilitating efficient processes for teach-
ing CNN models pose-invariant capabilities in uncon-
strained camera environments. In summary, the con-
tributions of this paper can be outlined as follows:
• We comprehensively analyze model performance
behavior across pose ranges in pitch and yaw.
• We propose a training data selection protocol that
minimizes the number of poses necessary for uni-
form recognition across all poses using distinct
pose filtering and geometric augmentations.
2 RELATED WORKS
2.1 Pose-Aware Face Recognition
Pose is a long-standing factor for performance degra-
dation for several identification tasks including face
recognition (Zhang and Gao, 2009; Ahmed et al.,
2019; Rajalakshmi and Jeyakumar, 2012), face de-
tection (Qi et al., 2023; Zhang et al., 2016; Tor-
res Pereira et al., 2014; Deng et al., 2020), and per-
son re-identification (Nguyen et al., 2024; Khaldi
et al., 2024). Early works prioritized holistic and
classical machine learning techniques (Turk and Pent-
land, 1991; Belhumeur et al., 1997), producing ac-
curate yet limited performance when exposed to fa-
cial changes and occlusion. However, state-of-the-
art results have transitioned from traditional means
to powerful CNNs that capture discriminative repre-
sentations of the face, performing accurate recogni-
tion regardless of occluding factors (Yi et al., 2014;
K. Wickrama Arachchilage and Izquierdo, 2020).
The introduction of margin-based penalties inside
the typical softmax loss function has proven effec-
tive in promoting inter-class separation and intra-class
compactness. SphereFace (Liu et al., 2017), Arc-
Face (Deng et al., 2019), and CosFace (Wang et al.,
2018) have leveraged margin penalty techniques to
score high accuracy against notable unconstrained
face benchmarks such as IJB-A (Klare et al., 2015),
IJB-C (Maze et al., 2018), and LFW (Huang et al.,
2007). Coupled with powerful feature extraction ca-
pabilities from novel CNN architectures (He et al.,
2016; Krizhevsky et al., 2012; Simonyan and Zis-
serman, 2014), CNN models are furthering their re-
siliency to challenging recognition factors including
pose, illumination, and expression. However, it is ap-
parent that benchmark results are dominated by evalu-
ation on frontal faces, and further evaluation is needed
on extreme view-point variations.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
448
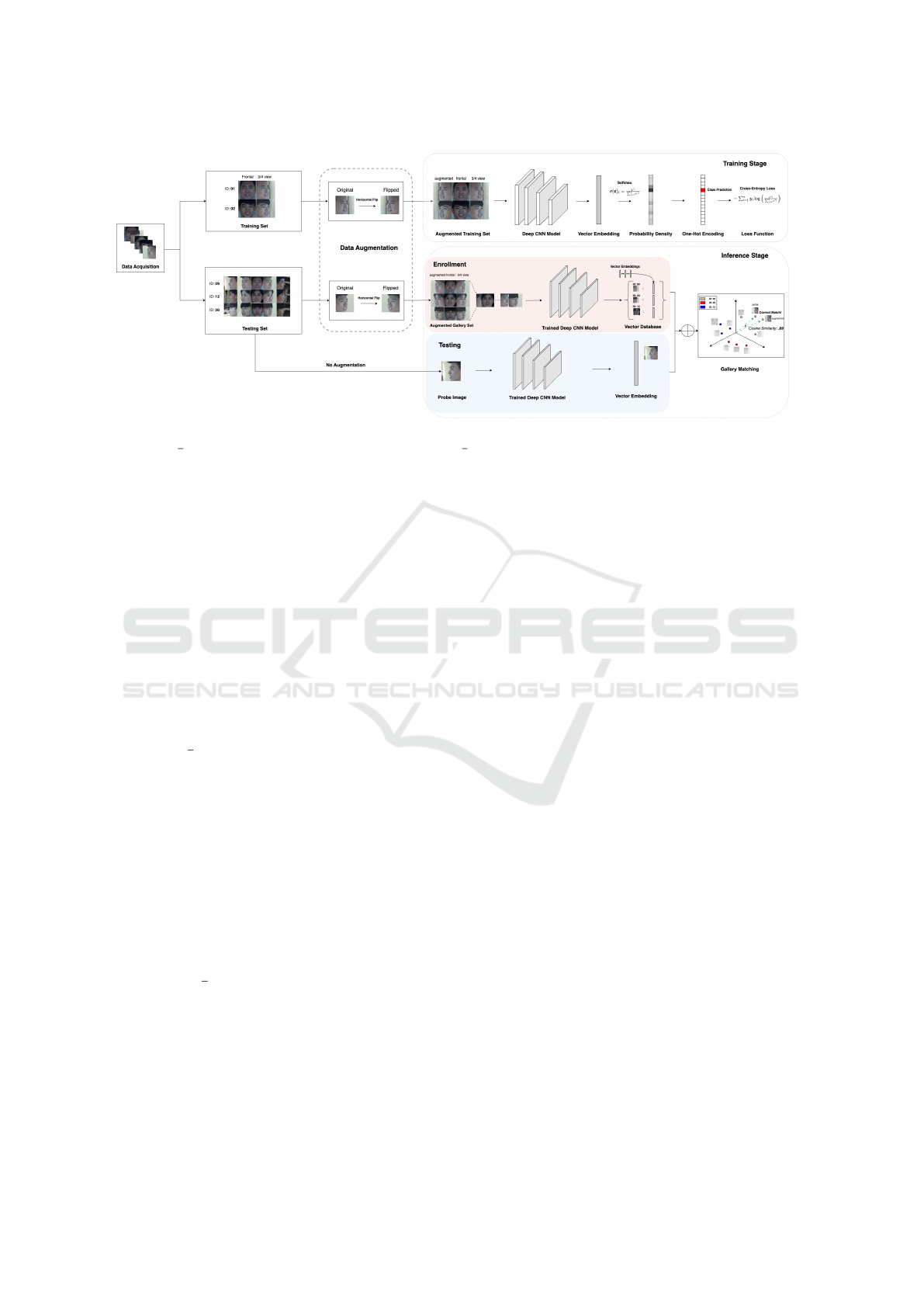
Figure 2: CNN model data selection framework composed of a training stage and inference stage pipeline. We enroll yaw
poses 45
◦
(
3
4
view), 0° (frontal view), and synthetic mirrors of
3
4
views in our training set and gallery, capable of identification
regardless of yaw orientation.
2.2 Performance Across Pose
Studies focusing on model behavior across poses uti-
lize model inference in face gallery matching tasks to
observe recognition capabilities across the full head
orientation (Gunawan and Prasetyo, 2017). Muller et
al. (M
¨
uller et al., 2007) conducted a similarity rank-
matching study that utilized statistical clustering to
recognize -45
◦
, 0
◦
, and 45
◦
yaw poses in a probe-
gallery matching task. The study concluded that 0
◦
yaw generalized the best across all three poses. These
studies follow large motivation from natural recog-
nition mechanisms in human psychology. It is be-
lieved that
3
4
side views (45
◦
yaw) of the face have
been inferred to have an advantage over frontal and
full side profile views when generalizing across fa-
cial views in psychological subject tests (Bruce et al.,
1987). Favelle et al. (Favelle and Palmisano, 2018)
conducted a psychological study of visual face recog-
nition in nature. They investigated face recognition
mechanisms with 80 human subjects participating in
experiments recognizing faces from various view-
points to understand the impacts of view-specific gen-
eralizations. The experimental protocol took a com-
parison view and matched it against a full range of
pitch-yaw poses up to 75
◦
in both rotation axes and
deduced that
3
4
view in yaw generalized best across
views ranging from frontal to side profile orientations.
Additionally, pitch comparison views looking down
were favored in view-specific generalizations com-
pared to extreme pitch angles where the face was pro-
jected upwards.
3 METHOD
3.1 Study Design Overview
As illustrated in Fig. 2, the proposed experimental
framework is composed of several stages spanning
both training and inference. First, we describe the
process from data acquisition to the training pipeline.
Given a set of N facial images X = {I
i
∈ R
512×512
}
N
i=1
comprised of identity labels Y = {y
i
∈ R}
N
i=1
obtained
from data acquisition, we select a subset of identities
Y
train
⊆ Y for our training set X
train
⊆ X. The training
set contains all poses for each identity in Y
train
, and
is filtered based on head pose, p = {pitch, yaw}, se-
lecting specific pitch and yaw combinations that max-
imize performance. Let p
pitch
denote the pitch angle
and p
yaw
denote the yaw angle. Given that X
train
con-
tains A pitch angles K = {p
yaw
∈ R}
A
i=1
and M yaw
angles L = {p
pitch
∈ R}
M
i=1
, we select a subset of pitch
poses K
opt
⊆ K and yaw poses L
opt
⊆ L that yield op-
timal performance for facial matching. The training
set after pose selection is then defined as:
X
train
= {I
i
∈ X | p
pitch
i
∈ K
opt
∩ p
yaw
i
∈ L
opt
}.
X
train
is fed into a deep CNN model for training or
fine-tuning, where embeddings f
i
∈ R
512
are gen-
erated to represent extracted discriminative features.
The model is trained using standard loss functions
such as softmax and cross-entropy to adjust embed-
dings in each epoch.
Second, we describe the protocol for model in-
ference. We gather a set of identities Y
test
⊆ Y for
the testing set X
test
⊆ X, where each identity y
i
∈
Y
test
is distinct from those in the training set, i.e.,
Minimizing Number of Distinct Poses for Pose-Invariant Face Recognition
449

Y
test
∩Y
train
=
/
0. Like the training set, X
test
contains
all poses for each identity. During inference, two sub-
stages occur: enrollment and testing.
In the enrollment sub-stage, we filter the testing
set X
test
to retain only the poses that optimize perfor-
mance based on the same criteria used for training.
Specifically, we select the same optimal pose subset
of pitch poses K
opt
and yaw poses L
opt
, and apply
flip transformations to images where p
yaw
̸= 0
◦
, en-
rolling a pair of mirrored poses comprised of a non-
augmented image and its flipped counterpart. The
gallery set G, containing the known face identities,
is then defined as:
G = {I
i
∈ X
test
| p
pitch
i
∈ K
opt
∩(p
yaw
i
∈ L
opt
∪flip(p
yaw
i
))}.
The faces in the gallery set are passed through the
trained CNN to generate embeddings f
G
= { f
g
∈
R
512
| g ∈ G}, which are stored in a vector database
corresponding to their identity labels.
During the testing sub-stage, we select a probe im-
age f
probe
of unknown identity from X
test
, where:
f
probe
∈ {I
k
∈ X
test
| p
pitch
k
∈ R ∩ p
yaw
k
∈ R}.
Here, the probe image is selected from all possible
permutations of pitch and yaw angles within X
test
.
We note the probe set contains both optimal and non-
optimal poses, indicating that the poses of the probe
set include permutations of pitch and yaw angles that
may not be in the gallery set. Following, we feed the
probe image into the trained CNN to generate its em-
bedding f
probe
∈ R
512
. To predict the probe image, we
compute the cosine similarity between the probe em-
bedding and each embedding in the gallery set where
the gallery image g
match
= argmax
g∈G
cos( f
probe
, f
g
) cor-
responds to the highest cosine similarity, thus iden-
tifying the predicted matching identity for the probe
image.
3.2 Pose Evaluation
Given a set of m poses, we utilize facial poses of
pitch-yaw rotation angles p
1
, p
2
, . . . , p
m
, where each
p
i
∈ R
2
, and group them in unique pose sets S
i
, where
S
i
⊆ {p
1
, p
2
, . . . , p
m
} is a subset of the poses incor-
porated into the query and gallery sets during facial
matching.
We organize images in the training and test sets
into unique pose groups dependent on yaw, pitch,
or augmentation evaluation. We use a dataset com-
prised of yaw and pitch angles, denoted as Y =
{y
1
, y
2
, . . . , y
m
} and P = {p
1
, p
2
, . . . , p
m
}, respec-
tively, to create unique sets of pitch-yaw angles.
Specifically, for a given task, we form a pose set
S
i
⊆ Y × P where each S
i
can include specific pitch
and yaw combinations, such as grouping side pro-
files together, frontal poses, or combining extreme
side profiles with frontal poses. Our baseline DCNN
model is fine-tuned on the targeted pose group and
then evaluated using a CNN backbone to encode face
embeddings f ∈ R
512
in the latent space for model in-
ference. Let Q and G denote the query and gallery
sets, respectively, each with distinct pose sets S
Q
and
S
G
, such that S
Q
and S
G
are subsets of Y × P. First,
we convert all images in Q and G to embeddings.
Then, we iterate through the query set, Q, compar-
ing each probe image q
i
∈ Q to the gallery of en-
rolled images G, computing the cosine similarity be-
tween each probe image q
i
and each gallery image
g
j
∈ G separately. In a one-to-many comparison, we
take the probe-gallery face pair (q
i
, g
j
) that computes
the highest cosine similarity in the latent space as the
model prediction.
Following pose evaluation methods to find a min-
imal pose set, we utilize augmentation techniques to
synthesize mirrored poses to replace real faces. Given
a set of poses S, we take a pose p
i
∈ S where p
yaw
i
̸= 0.
We achieve the mirrored pose of p
i
through the func-
tion f (p
i
) = flip(p
i
), where flip represents a hori-
zontal flip of the face image using geometric aug-
mentation techniques. We incorporate the synthetic
pose p
fake
= f (p
i
) as a replacement for the real mir-
ror pose −p
i
, resulting in a new augmented pose set
S
aug
= (S \ {−p
i
})∪{p
fake
}. S
aug
is incorporated into
the gallery G and training set T for training and eval-
uation against a mixture of real and synthetic poses
of faces. The augmentation effort aims to reduce the
number of minimal poses m to
m
2
yaw poses.
4 EXPERIMENTS
4.1 Experimental Outline
Our objective is to identify a minimal set of poses that
ensures consistent recognition performance across
varying head orientations. To achieve this, we de-
signed a series of experiments aimed at validating our
strategy for optimal data selection in facial matching
tasks. The experiments, summarized in Table 1, fo-
cus on evaluating model performance across different
yaw and pitch angles, as well as the impact of syn-
thetic pose augmentation.
4.1.1 Datasets
The Multi-Pitch Multi-Yaw Dataset (M2FPA) (Li
et al., 2019) contains 397,544 images of 229 subjects
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
450
Table 1: Summary of Experiments.
Experiment Description
1. Yaw Evaluation Find a minimal set of yaw angles that provides uniform recognition against all yaw poses.
2. Pitch Evaluation Based on the optimal set of yaw angles determined in the first experiment, evaluate dif-
ferent pitch angles to identify the pitch angles that optimize model performance.
3. Pose Augmentation Test performance with synthetic pose augmentation and checks whether eliminating mir-
rored poses can improve or maintain model performance compared to using real poses.
4. Gallery Reduction Test performance with reduced gallery set where one image per yaw angle is enrolled for
each ID.
with 62 poses (including 13 yaw angles, 5 pitch an-
gles, and 44 yaw-pitch angles) which range from -
90
◦
to 90
◦
degrees in yaw and -30
◦
to 30
◦
degrees
in pitch. The distinct yaw poses comprise of −90
◦
,
−75
◦
, −67.5
◦
, −60
◦
, −45
◦
, −30
◦
, −22.5
◦
, −15
◦
,
0
◦
, 15
◦
, 22.5
◦
, 30
◦
, 45
◦
, 60
◦
, 67.5
◦
, 75
◦
, and 90
◦
.
The distinct pitch poses are −30
◦
, −15
◦
, 0
◦
, 15
◦
, and
30
◦
. Our study utilizes the M2FPA dataset to con-
struct various pose groups for training and testing.
With this dataset, we explore the differences in perfor-
mance between a large variance in viewpoints ranging
from frontal facing to extreme side profiles.
4.1.2 Query-Gallery Set Curation
We curate the query and gallery sets based on pose
evaluation from our experimental design, ensuring
that every identity from the test set is represented.
Given the evaluation of a permutation of poses for
the query set p
Q
and a permutation of poses for the
gallery set p
G
, we first iterate through each identity in
p
Q
within the test set and randomly select one image
for enrollment into the query set. Next, for the gallery
set, we iterate through each identity within the pose
group p
G
and randomly select 15 images for enroll-
ment into the gallery set. Each query set contains 67
images, representing one image from each identity,
while the gallery set contains 1005 images in total,
representing 15 images for each of the 67 identities.
For the gallery reduction experiment, we deviate
from the previous gallery protocol and aim to reduce
the number of images in the gallery set proportionally.
Here, the number of images enrolled for an identity is
dependent on the gallery poses p
G
. We enroll a sin-
gle image for each unique yaw angle in p
G
, where
the pitch within the image is randomized and falls
between the optimal pitch range. Therefore, the re-
sulting gallery contains N images for N unique yaw
angles in p
G
.
4.1.3 Model Fine-Tuning
We select a DCNN multi-class classifier ArcFace
(Deng et al., 2019) model to represent our bench-
mark for evaluation. Given ArcFace’s high accuracy
Table 2: Baseline Accuracy Results From Query Sets Be-
tween −90
◦
and 90
◦
Against All Poses Enrolled in Gallery.
Gallery Query
R-1 Accuracy Average
Pitch Yaw Pitch Yaw
-30 to 30 −90
◦
to 90
◦
-30 to 30
−90
◦
to −70
◦
94.03%
98.51
−70
◦
to −45
◦
100%
−45
◦
to −15
◦
100%
−15
◦
to 15
◦
100%
15
◦
to 45
◦
98.51%
45
◦
to 70
◦
98.51%
70
◦
to 90
◦
98.51%
on unconstrained datasets, we intend to deliver re-
sults that represent the current capabilities of DCNN
models across the full range of head poses. Arc-
Face consists of a CNN backbone and an Additive
Angular Margin loss function that promotes intra-
class compactness and inter-class separation using a
margin penalty in a softmax loss function. We at-
tach the ArcFace layer on CNN backbone iResNet-
50 (Duta et al., 2020) for fine-tuning and inference to
generate face embeddings for a face gallery-matching
scenario. Using a pre-trained ArcFace model from
the MS1MV3 dataset (Deng et al., 2019) (compris-
ing of frontal poses and achieving ∼95% on the un-
constrained dataset IJB-C), we fine-tune the ArcFace
model on specific pose groups individually for 10
epochs at a learning rate of 1e
−1
. Each face image
is downsampled from 512 × 512 to 112 × 112 pixels,
before being fed to the model. For augmentation ex-
periments, we employ horizontal flips to faces during
training to assess performance with mirrored faces.
4.2 Baseline Performance
As preliminary, we generated baseline results by fix-
ing the gallery set with all available poses for each
identity from the M2FPA dataset. By providing all
poses, we validate high matching performance for any
probe image given that the probe has at least one fa-
vorable pose within the set of provided poses. As seen
in Table 2, a query set Q
i
with a defined set of poses
S
Q
feeds probe images q
i
∈ Q to the iResNet-50 CNN
backbone to test against the gallery set of all enrolled
poses G
all
, computing the baseline rank-1 metrics. As
Minimizing Number of Distinct Poses for Pose-Invariant Face Recognition
451
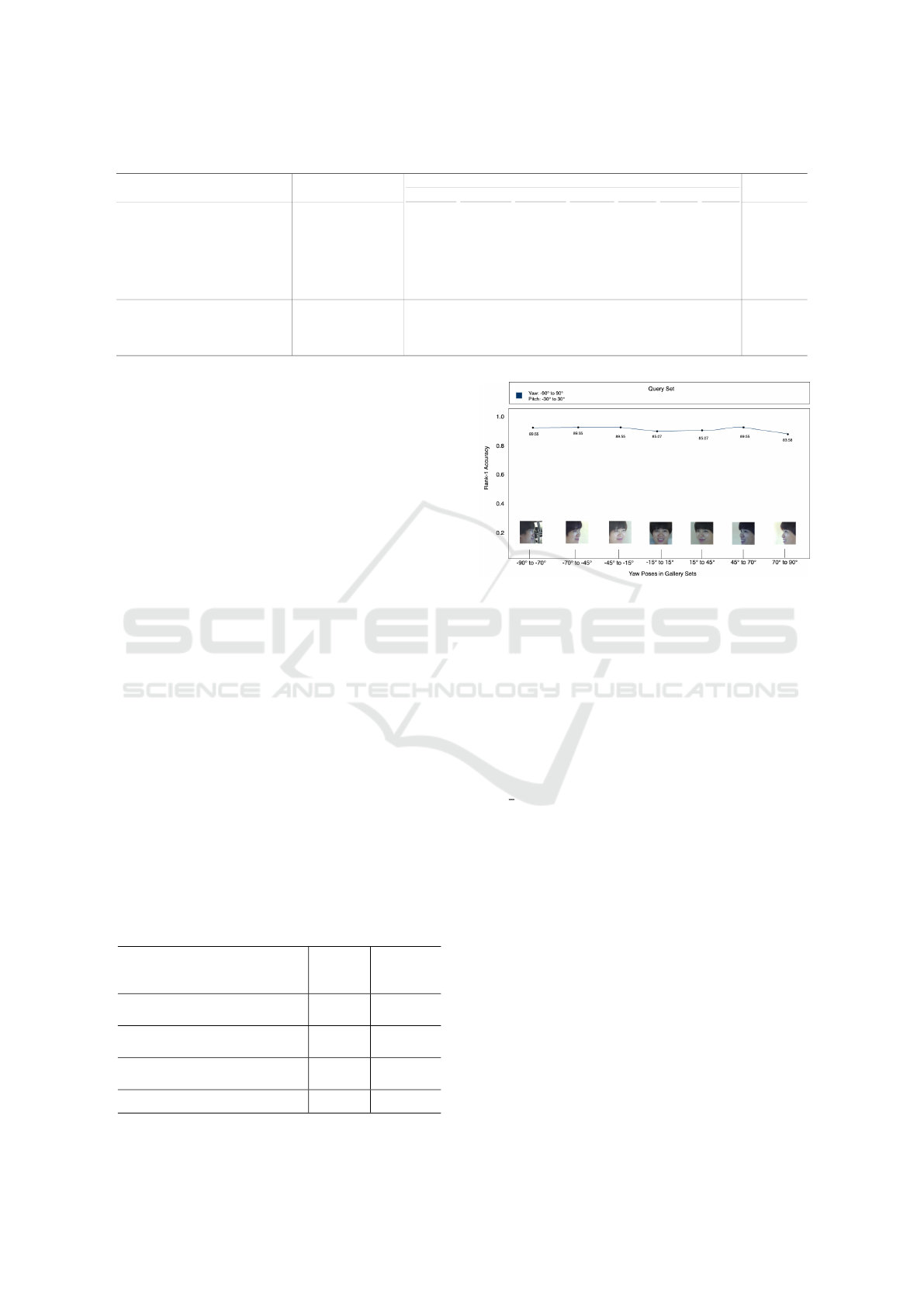
Table 3: Rank-1 Accuracy for Query-Gallery Matching Based on Yaw.
Experimental Details Query Gallery Average Rank-1
−90
◦
to −70
◦
−70
◦
to −45
◦
−45
◦
to −15
◦
−15
◦
to 15
◦
15
◦
to 45
◦
45
◦
to 70
◦
70
◦
to 90
◦
Experiment 1. Initial Pose Sets
−90
◦
to −70
◦
95.52% 67.16% 44.78% 11.94% 16.42% 11.94% 23.88% 38.81%
−70
◦
to −45
◦
95.52% 100% 98.51% 91.04% 71.64% 73.13% 71.64% 85.93%
−45
◦
to −15
◦
91.04% 98.51% 98.51% 97.01% 98.51% 89.55% 80.60% 93.39%
−15
◦
to −15
◦
85.07% 100% 100% 100% 100% 98.51% 91.04% 96.37%
15
◦
to 45
◦
67.16% 95.52% 98.51% 98.51% 100% 98.51% 95.52% 93.39%
45
◦
to 70
◦
68.66% 79.10% 88.06% 91.04% 94.03% 97.01% 98.51% 88.06%
70
◦
to 90
◦
38.81% 22.39% 17.91% 22.39% 53.73% 76.12% 98.51% 47.12%
Experiment 2. Analyzing Between −45
◦
and 45
◦
−45
◦
to 45
◦
85.07% 97.01% 100% 98.51% 98.51% 100% 94.03% 96.16%
−45
◦
to −15
◦
∪ 15
◦
to 45
◦
89.55% 98.51% 100% 100% 100% 100% 97.01% 97.87%
−45
◦
to −22.5
◦
∪ 22.5
◦
to 45
◦
91.04% 100% 100% 97.01% 98.51% 100% 94.03% 97.23%
−45
◦
, 0
◦
, 45
◦
95.52% 97.01% 98.51% 100% 100% 100% 92.54% 97.65%
∗
Pitch is fixed between −30
◦
and 30
◦
for all sets in the query and gallery
a result, each query set Q
i
scores a relatively high
matching accuracy. We see this result as explainable
by the presence of similar face poses from the target
identity within the gallery, ensuring higher similarity
scores in the embedding space.
4.3 Pose Evaluation on Yaw
We compare model performance across the whole
yaw range between −90
◦
and 90
◦
. As a starting point,
we build a set of pose groups S for each query and
gallery set to assess yaw. We construct each pose set
s
i
∈ S using all pitch angles between −30
◦
and 30
◦
and separate yaw within ∼20
◦
–30
◦
of the next pose
set s
i+1
.
Given a query set Q
i
, which represents the target
pose set s
Q
⊂ S for evaluation, we take each probe
image q
j
∈ Q
i
and make a prediction based on the
highest cosine similarity with images from the gallery
G
j
, where the gallery poses are represented by s
G
⊂ S.
As seen in Table 3, we find that when
[−45
◦
, 0
◦
, 45
◦
] ⊂ s
Q
results in the highest rank-1 ac-
curacies compared to other angles within the range
[−90
◦
, 90
◦
]. Pose sets containing frontal angles ex-
hibit consistent accuracy and minimal degradation
when extended to extreme yaw angles (up to approx-
imately 90
◦
). Let S represent the initial set of poses,
with each pose s ∈ S corresponding to a yaw angle.
We define a restricted subset S
frontal
⊂ S that contains
Table 4: Pose Ablation on Yaw Between −45
◦
and 45
◦
.
Poses
Number
of
Poses
Avg.
Rank-1
Accuracy
−45
◦
, −30
◦
, −22.5
◦
, −15
◦
,
0
◦
, 15
◦
, 22.5
◦
, 30
◦
, 45
◦
9 96.16%
−45
◦
, −30
◦
, −22.5
◦
, −15
◦
,
15
◦
, 22.5
◦
, 30
◦
, 45
◦
8 97.87%
−45
◦
, −30
◦
, −22.5
◦
, 22.5
◦
,
30
◦
, 45
◦
6 97.23%
−45
◦
, 0
◦
, 45
◦
3 97.65%
Figure 3: Fine-tuning ArcFace on strictly −45
◦
, 0
◦
, and 45
◦
results in uniform recognition performance across yaw.
only the frontal poses within the range [−45
◦
, 45
◦
],
where S
frontal
= {s ∈ S : −45
◦
≤ s ≤ 45
◦
}.
This subset consistently achieves higher accuracy
compared to more extreme angles outside this range.
Continuing, we evaluate the pose set S
f rontal
and ab-
late distinct poses to observe performance stability
across G
j
. In our last iteration, we constrain our query
and training set to a minimal group of poses, −45
◦
,
0
◦
, 45
◦
. The final pose set containing a frontal and
two
3
4
views produces 97.65% rank-1 accuracy, indi-
cating little to no degradation from the initial 9 poses
resulting in 96.16% within [−45
◦
, 45
◦
], as seen in Ta-
ble 4. In Fig. 3, we visualize the model’s stability to
pose variation by taking an example identity and ver-
ifying high cosine similarity for our suggested poses
within the gallery. Regardless of frontal or side pro-
file, performance stabilizes against all yaw angles.
4.4 Pose Evaluation on Pitch
We observe performance stability considering pitch
variation. Like yaw, we construct a set of initial poses
comprised of negative, positive, and mixed pitch an-
gles.To simplify the evaluation, we constrain the yaw
angles to −45
◦
, 0
◦
, and 45
◦
, based on our prior yaw
analysis. For pitch, each probe image q
i
∈ Q is as-
signed either 30
◦
(positive pitch) or −30
◦
(negative
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
452
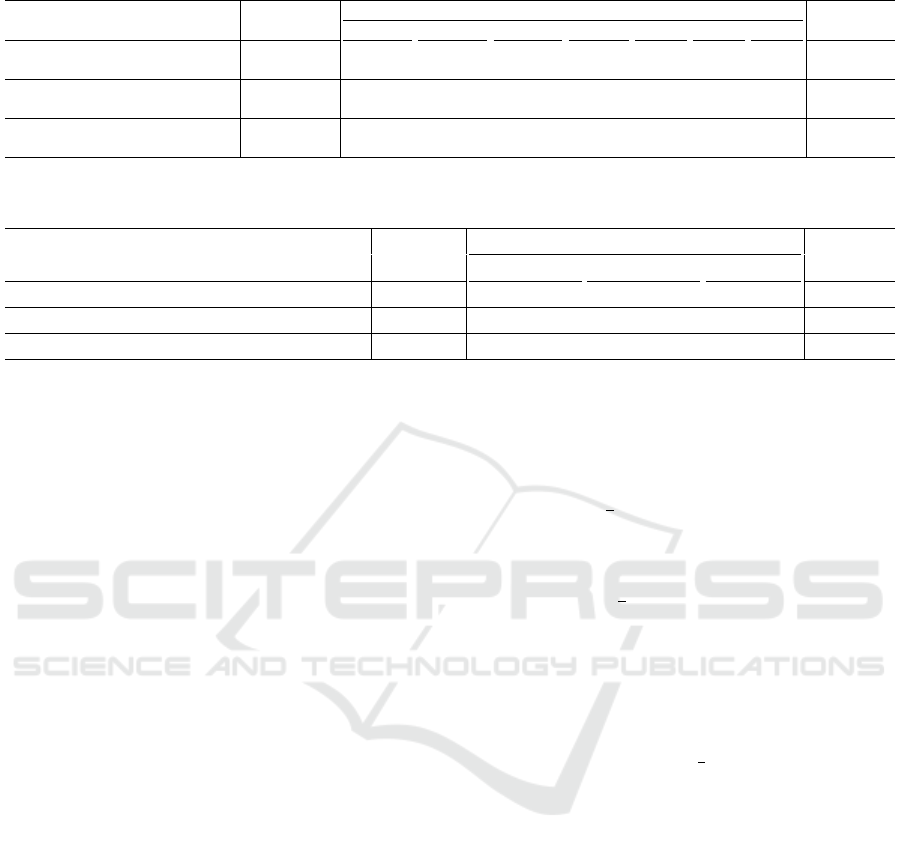
Table 5: Rank-1 Accuracy for Query-Gallery Matching Based on Pitch.
Experimental Details Query Gallery (columns are separated by yaw) Average Rank-1
Yaw: −45
◦
, 0
◦
, 45
◦
−90
◦
to −70
◦
−70
◦
to −45
◦
−45
◦
to −15
◦
−15
◦
to 15
◦
15
◦
to 45
◦
45
◦
to 70
◦
70
◦
to 90
◦
Gallery enrolls all pitches (−30
◦
to 30
◦
)
Pitch: −30
◦
67.16% 94.03% 97.01% 95.52% 97.01% 94.03% 73.13% 88.27%
Pitch: 30
◦
55.22% 76.12% 86.57% 83.58% 80.60% 89.55% 53.73% 75.05%
Gallery enrolls only positive pitches (0
◦
to 30
◦
)
Pitch: −30
◦
71.64% 86.57% 89.55% 89.55% 95.52% 89.55% 68.66% 84.43%
Pitch: 30
◦
53.73% 79.10% 94.03% 86.57% 94.03% 89.55% 58.21% 79.32%
Gallery enrolls only negative pitches (−30
◦
to 0
◦
)
Pitch: −30
◦
76.12% 95.52% 98.51% 100% 98.51% 95.52% 73.13% 91.04%
Pitch: 30
◦
34.33% 55.22% 71.64% 73.13% 67.16% 64.18% 40.30% 57.99%
∗
Yaw is fixed at −45
◦
, 0
◦
, and 45
◦
for all sets in the query
Table 6: Rank-1 Accuracy for Query-Gallery Matching Using Synthetic Poses.
Experimental Details Query Gallery (columns are separated by yaw) Average Rank-1
Pitch: −30
◦
to 0
◦
−45
◦
, 0
◦
, 45
◦
(control) −45
◦
, 0
◦
, flipped −45
◦
flipped 45
◦
, 0
◦
, 45
◦
Model training enrolls all real images in the training set (No Augmentation)
Yaw: −90
◦
to 90
◦
91.04% 89.55% 89.55% 90.05%
Model training replaces 45
◦
yaw with flipped −45
◦
view
in the training set Yaw: −90
◦
to 90
◦
92.54% 91.04% 92.54% 92.04%
Model training replaces −45
◦
yaw with flipped 45
◦
view in the training set
Yaw: −90
◦
to 90
◦
88.06% 91.04% 89.55% 89.55%
∗
We run the experiment 5 times and show the fluctuation of results between ∼2-3%
pitch) to compare performance under contrasting con-
ditions during inference. To assess model behavior of
varying pitch, we perform gallery matching by cross-
testing the query set against galleries with positive,
negative, and mixed pitch angles. The results, pre-
sented in Table 5, report the rank-1 matching accuracy
for probe images with both 30
◦
and −30
◦
pitch.
Probe images with −30
◦
pitch consistently out-
perform those with 30
◦
across all gallery conditions.
Specifically, probe images with −30
◦
pitch achieve an
average rank-1 accuracy approximately 13% higher
than 30
◦
pitch images when matched against a gallery
containing all pitch variations. In addition, −30
◦
pitch probe images exhibit greater resilience to per-
formance degradation when cross-matched with pos-
itive pitch images. The accuracy decreases from
91.04% to 84.43%, a modest reduction of ∼7%, when
tested against negative versus positive pitch galleries.
In contrast, probe images with 30
◦
pitch experience
a more substantial drop in performance. The rank-
1 accuracy for 30
◦
pitch images drops from an aver-
age of 79.32% when matched against negative pitch
galleries to 57.99% when cross-matched with posi-
tive pitch, representing a decrease of nearly 20%. We
identify that probe images with negative pitch demon-
strate greater robustness to performance degradation
and achieve higher accuracy, regardless of the pitch
composition of the gallery. We remark model per-
formance on negative pitch angles complements high
performance on the ideal frontal pitch (0
◦
). We in-
fer that poses with 0
◦
or negative pitch are sufficient
for DCNN models to capture discriminative features
when mapped to the embedding space.
4.5 Evaluation on Synthetic Poses
We exploit the symmetric structure of the human face
to leverage horizontal flips of mirrored views. Given a
pair of mirrored
3
4
views (−45
◦
and 45
◦
) and a frontal
view (0
◦
yaw), we investigate whether the flipped
orientation from a single |45
◦
| yaw angle can effec-
tively replace the opposite view and supplement the
complete pair of
3
4
views. Our hypothesis suggests
that this use of synthetic poses through flipping can
achieve similar performance to using both authentic
−45
◦
and 45
◦
views. Gathering insights from our pre-
vious experiments, we use the minimal pitch range
(−30
◦
to 0
◦
) and yaw range (−45
◦
, 0
◦
, 45
◦
) to per-
form augmentation tests. We apply horizontal flip-
ping to replace one of the
3
4
views and observe the
model’s performance.
Table 6 presents the results from experiments on
galleries augmented with synthetic poses. The query
set includes all yaw poses, and the gallery set is
constructed using different combinations of real and
flipped images. We compare the performance when
using flipped images to supplement either the −45
◦
or 45
◦
view, and validate whether there is a signifi-
cant performance difference between the flipped and
non-flipped counterparts. The results show that per-
formance remains uniform across all configurations
with only a marginal difference of ∼1-2% between
the gallery sets. Our highest performance is achieved
when flipping the −45
◦
view to replace 45
◦
in the
training set, yielding a mean accuracy of 92.04%.
However, the performance difference between this
configuration and the others, including the control
(using original views), is suggested to be minimal.
We attribute the fluctuations in performance (within
Minimizing Number of Distinct Poses for Pose-Invariant Face Recognition
453

Table 7: Image Reduction for Query-Gallery Matching.
Query Gallery
R-1 Accuracy
Pitch Yaw Images/Pose Yaw
-30 to 30 −90
◦
to 90
◦
9 −45
◦
to −45
◦
80.60%
6 −45
◦
to 22.5
◦
∪ 22.5
◦
to 45
◦
79.10%
3 −45
◦
, 0
◦
, 45
◦
82.09%
2 flipped 45
◦
, 0
◦
, 45
◦
80.60%
2 −45
◦
, 0
◦
, flipped −45
◦
77.61%
∗
Each gallery enrolls one image for each unique yaw angle in an identity’s pose set.
a 2-3% range) to the variability during fine-tuning,
rather than any preference for flipping a particular
yaw direction. We validate these findings by repeat-
ing the experiments five times, confirming the consis-
tency of our results. The experiments show that hor-
izontal flips match or slightly improve performance
compared to authentic poses. Therefore, we identify
the necessary poses for the training and enrollment to
be a frontal view (0
◦
) and a single
3
4
view (|45
◦
|).
4.6 Gallery Reduction Evaluation
The final phase of our study reduces the number of
images per pose in the gallery set. From previous
experiments, we infer that using a yaw set of a sin-
gle frontal view (0
◦
) and a single
3
4
view (|45
◦
|) with
image augmentation is sufficient to produce uniform
recognition across all poses. To validate, we devise
a query-gallery scenario where each identity enrolls a
single image for each unique yaw angle in the iden-
tity’s pose set. Therefore, given N unique yaw an-
gles, we enroll N images for each identity. During
enrollment, the pitch of the face is randomly selected
between the proposed optimal pitch range, i.e., −30
◦
to 0
◦
. We evaluate this with a query set randomized
with all available poses between yaw −90
◦
to 90
◦
and
pitch −30
◦
to 30
◦
.
Table 7 presents our gallery reduction protocol’s
experimental details and evaluation results. Compar-
ing the performance between pose sets between −45
◦
to 45
◦
, model performance remains relatively con-
stant at ∼80% as the poses and number of images re-
duce. As shown in our results, we validate that the
performance is unaffected by image reduction when
we reduce the enrollment from 9 poses per ID to only
2 poses per ID. While having more images can be
beneficial, there is a lower bound on performance we
can expect with minimal images per pose.
5 CONCLUSION
Our main contributions in this study are two-fold.
First, we provide a comprehensive analysis of how
recognition accuracy varies across pose and augmen-
tation. Furthermore, we implement a training strat-
egy that minimizes the number of facial poses used
in training and reduces the need for data collection,
using more accessible variations of data. By assess-
ing performance across yaw, pitch, and augmentation,
we suggest a training data selection strategy that min-
imizes poses to yaw angles 0
◦
, a |45
◦
|, and a flipped
|45
◦
| using horizontal flip augmentation and pitches
that are frontal or negative. Following our method-
ology, we suggest that state-of-the-art DCNN mod-
els can result in uniform recognition accuracy across
pitch and yaw angles without the necessity of includ-
ing a large number of poses per subject in the gallery.
REFERENCES
Ahmed, S. B., Ali, S. F., Ahmad, J., Adnan, M., and Fraz,
M. M. (2019). On the frontiers of pose invariant face
recognition: A review. Artificial Intelligence Review,
53(4):2571–2634.
Asthana, A., Marks, T. K., Jones, M. J., Tieu, K. H., and Ro-
hith, M. (2011). Fully automatic pose-invariant face
recognition via 3d pose normalization. 2011 Interna-
tional Conference on Computer Vision.
Baltanas, S.-F., Ruiz-Sarmiento, J.-R., and Gonzalez-
Jimenez, J. (2021). Improving the head pose variation
problem in face recognition for mobile robots. Sen-
sors, 21(2).
Belhumeur, P., Hespanha, J., and Kriegman, D. (1997).
Eigenfaces vs. fisherfaces: recognition using class
specific linear projection. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 19(7):711–
720.
Bruce, V., Valentine, T., and Baddeley, A. (1987). The basis
of the 3/4 view advantage in face recognition. Applied
Cognitive Psychology, 1(2):109–120.
Chen, G., Shao, Y., Tang, C., Jin, Z., and Zhang, J. (2018).
Deep transformation learning for face recognition in
the unconstrained scene. Machine Vision and Appli-
cations, 29(3):513–523.
Cheng, Z., Zhu, X., and Gong, S. (2018). Surveil-
lance face recognition challenge. arXiv preprint
arXiv:1804.09691.
Deng, J., Guo, J., Ververas, E., Kotsia, I., and Zafeiriou, S.
(2020). Retinaface: Single-shot multi-level face lo-
calisation in the wild. 2020 IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR).
Deng, J., Guo, J., Xue, N., and Zafeiriou, S. (2019). Ar-
cface: Additive angular margin loss for deep face
recognition. In 2019 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
4685–4694.
Duta, I. C., Liu, L., Zhu, F., and Shao, L. (2020). Improved
residual networks for image and video recognition.
arXiv preprint arXiv:2004.04989.
Duta, I. C., Liu, L., Zhu, F., and Shao, L. (2021). Im-
proved residual networks for image and video recog-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
454

nition. 2020 25th International Conference on Pattern
Recognition (ICPR).
Favelle, S. and Palmisano, S. (2018). View specific gen-
eralisation effects in face recognition: Front and yaw
comparison views are better than pitch. PLOS ONE,
13(12).
Gunawan, A. A. and Prasetyo, R. A. (2017). Face recog-
nition performance in facing pose variation. CommIT
(Communication and Information Technology) Jour-
nal, 11(1):1.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Huang, G. B., Ramesh, M., Berg, T., and Learned-Miller,
E. (2007). Labeled faces in the wild: A database for
studying face recognition in unconstrained environ-
ments. Technical Report 07-49, University of Mas-
sachusetts, Amherst.
K. Wickrama Arachchilage, S. P. and Izquierdo, E. (2020).
Deep-learned faces: A survey. EURASIP Journal on
Image and Video Processing, 2020(1).
Khaldi, K., Nguyen, V. D., Mantini, P., and Shah, S. (2024).
Unsupervised person re-identification in aerial im-
agery. In Proceedings of the IEEE/CVF Winter Con-
ference on Applications of Computer Vision (WACV)
Workshops, pages 260–269.
Klare, B. F., Klein, B., Taborsky, E., Blanton, A., Cheney,
J., Allen, K., Grother, P., Mah, A., Burge, M., and
Jain, A. K. (2015). Pushing the frontiers of uncon-
strained face detection and recognition: Iarpa janus
benchmark a. 2015 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C., Bottou, L.,
and Weinberger, K., editors, Advances in Neural In-
formation Processing Systems, volume 25. Curran As-
sociates, Inc.
Li, P., Wu, X., Hu, Y., He, R., and Sun, Z. (2019). M2fpa:
A multi-yaw multi-pitch high-quality database and
benchmark for facial pose analysis. In 2019
IEEE/CVF International Conference on Computer Vi-
sion (ICCV).
Liu, W., Wen, Y., Yu, Z., Li, M., Raj, B., and Song, L.
(2017). Sphereface: Deep hypersphere embedding for
face recognition. 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Masi, I., Tran, A. T., Hassner, T., Leksut, J. T., and Medioni,
G. (2016). Do we really need to collect millions of
faces for effective face recognition? Computer Vision
– ECCV 2016, page 579–596.
Maze, B., Adams, J., Duncan, J. A., Kalka, N., Miller, T.,
Otto, C., Jain, A. K., Niggel, W. T., Anderson, J., Ch-
eney, J., and et al. (2018). Iarpa janus benchmark - c:
Face dataset and protocol. 2018 International Confer-
ence on Biometrics (ICB).
M
¨
uller, M. K., Heinrichs, A., Tewes, A. H., Sch
¨
afer, A.,
and W
¨
urtz, R. P. (2007). Similarity rank correlation
for face recognition under unenrolled pose. Advances
in Biometrics, page 67–76.
Nguyen, V. D., Khaldi, K., Nguyen, D., Mantini, P.,
and Shah, S. (2024). Contrastive viewpoint-aware
shape learning for long-term person re-identification.
In Proceedings of the IEEE/CVF Winter Conference
on Applications of Computer Vision (WACV), pages
1041–1049.
Prince, S. J. and Elder, J. (2006). Tied factor analysis for
face recognition across large pose changes. Proced-
ings of the British Machine Vision Conference 2006.
Qi, D., Tan, W., Yao, Q., and Liu, J. (2023). Yolo5face:
Why reinventing a face detector. Lecture Notes in
Computer Science, page 228–244.
Rajalakshmi, R. and Jeyakumar, M. K. (2012). A review
on classifiers used in face recognition methods under
pose and illumination variation. International Journal
of Computer Science Issues (IJCSI), 9(6):474–485.
Copyright - Copyright International Journal of Com-
puter Science Issues (IJCSI) Nov 2012; Last updated
- 2023-11-20.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Taigman, Y., Yang, M., Ranzato, M., and Wolf, L. (2014).
Deepface: Closing the gap to human-level perfor-
mance in face verification. 2014 IEEE Conference on
Computer Vision and Pattern Recognition.
Torres Pereira, E., Martins Gomes, H., and de Carvalho,
J. M. (2014). An approach for multi-pose face detec-
tion exploring invariance by training. Lecture Notes in
Computer Science, page 182–191.
Turk, M. and Pentland, A. (1991). Face recognition us-
ing eigenfaces. In Proceedings. 1991 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, pages 586–591.
Wang, H., Wang, Y., Zhou, Z., Ji, X., Gong, D., Zhou, J., Li,
Z., and Liu, W. (2018). Cosface: Large margin cosine
loss for deep face recognition. 2018 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition.
Yi, D., Lei, Z., Liao, S., and Li, S. (2014). Learning face
representation from scratch. ArXiv, abs/1411.7923.
Yin, X. and Liu, X. (2018). Multi-task convolutional neu-
ral network for pose-invariant face recognition. IEEE
Transactions on Image Processing, 27(2):964–975.
Yin, X., Yu, X., Sohn, K., Liu, X., and Chandraker, M.
(2019). Feature transfer learning for face recognition
with under-represented data. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Zhang, K., Zhang, Z., Li, Z., and Qiao, Y. (2016). Joint
face detection and alignment using multitask cascaded
convolutional networks. IEEE Signal Processing Let-
ters, 23(10):1499–1503.
Zhang, X. and Gao, Y. (2009). Face recognition across pose:
A review. Pattern Recognition, 42(11):2876–2896.
Minimizing Number of Distinct Poses for Pose-Invariant Face Recognition
455
