
REPVSR: Efficient Video Super-Resolution via Structural
Re-Parameterization
KunLei Hu
1 a
and Dahai Yu
2 b
1
Tetras.Ai, China
2
TCL Corporate Research (HK) Co., Ltd, China
Keywords:
Video Super-Resolution, Re-Parameterization Method, Efficiency Network.
Abstract:
Recent advances in video super-resolution (VSR) explored the power of deep learning to achieve a bet-
ter reconstruction performance. However, the high computational cost still hinders it from practical usage
that demands real-time performance (24 fps). In this paper, we propose a re-parameterization video super-
resolution(REPVSR) to accelerate the reconstruction speed with efficient and generic network. Specifically,
we propose re-parameterizable building blocks, namely Super-Resolution Multi-Branch block (SRMB) for ef-
ficient SR part design and FlowNet Multi-Branch block (FNMB) for optical flow estimation part. The blocks
extract features in multiple paths in the training stage, and merge the multiple operations into one single 3×3
convolution in the inference stage. We then propose an extremely efficient VSR network based on SRMB and
FNMB, namely REPVSR. Extensive experiments demonstrate the effectiveness and efficiency of REPVSR.
1 INTRODUCTION
Video super-resolution (VSR) is developed from sin-
gle image super-resolution, it aims to generate a high-
resolution (HR) video from its corresponding low-
resolution (LR) observation by filling in missing de-
tails, trying to restore the definition of video and
improve the subjective visual quality. Thanks to
deep learning, VSR based on neural networks expe-
rienced significant improvements over the last few
years. However, the main research directions(Wang
et al., 2019; Chan et al., 2021; Liu et al., 2021) lie
in the pursuit of high fidelity scores by employing a
very deep and complicated network structure, ignor-
ing computational efficiency and memory constraints.
In order to deploy VSR models on resource-
limited devices, latest research demonstrated mean-
ingful advances in terms of lightweight model struc-
ture design(Xia et al., 2023; Fuoli et al., 2023), mod-
els with fewer FLOPs may have even larger latency
because of the deployment of hardware-unfriend op-
erators(Wang et al., 2019), some tiny VSR models
such as VESPCN(Caballero et al., 2017) can reach
nearly real-time speed, in the meantime, their VSR
performance measured by PSNR is quite limited.
a
https://orcid.org/0009-0005-1309-0951
b
https://orcid.org/0000-0003-1427-8807
Thus, model parameters reduction and hardware-
friendly operators design have attracted more and
more attention. It is always challenging to design both
light-weight and inference efficient VSR model due to
the very limited hard-ware resources, but along with
growing commercial and industrial demand, it is also
very necessary to design a lightweight VSR model
with fewer parameters and efficient structures.
In this paper, inspired by Ding.et.al(Ding et al.,
2021b; Ding et al., 2022; Zhou et al., 2023), We
propose a rigorous and effective framework SRMB
and FNMB that is theoretically verified and exper-
imentally validated. Based on SRMB and FNMB
structure, we further propose recurrent VSR net-
work(REPVSR) using super-light model design and
re-parameterization technique to accelerate the infer-
ence speed and enhance reconstructive quality. The
contributions of this study are as listed:
(1) The SRMB and FNMB blocks proposed in this
paper can be used to improve the super resolution per-
formance and optical flow estimation results respec-
tively, without introducing any extra burden on infer-
ence or deployment.
(2) We propose a super efficient and lightweight
VSR model termed REPVSR by embedding the
SRMB and FNMB blocks into recurrent end-to-end
trainable VSR framework. Extensive experiments and
comparisons validate the computational efficiency
540
Hu, K. and Yu, D.
REPVSR: Efficient Video Super-Resolution via Structural Re-Parameterization.
DOI: 10.5220/0013186900003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
540-546
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
RepSRNet
RepFlowNet
Up↑
Warp
Warp
C
Flowloss
SpacetoDepth
SRloss
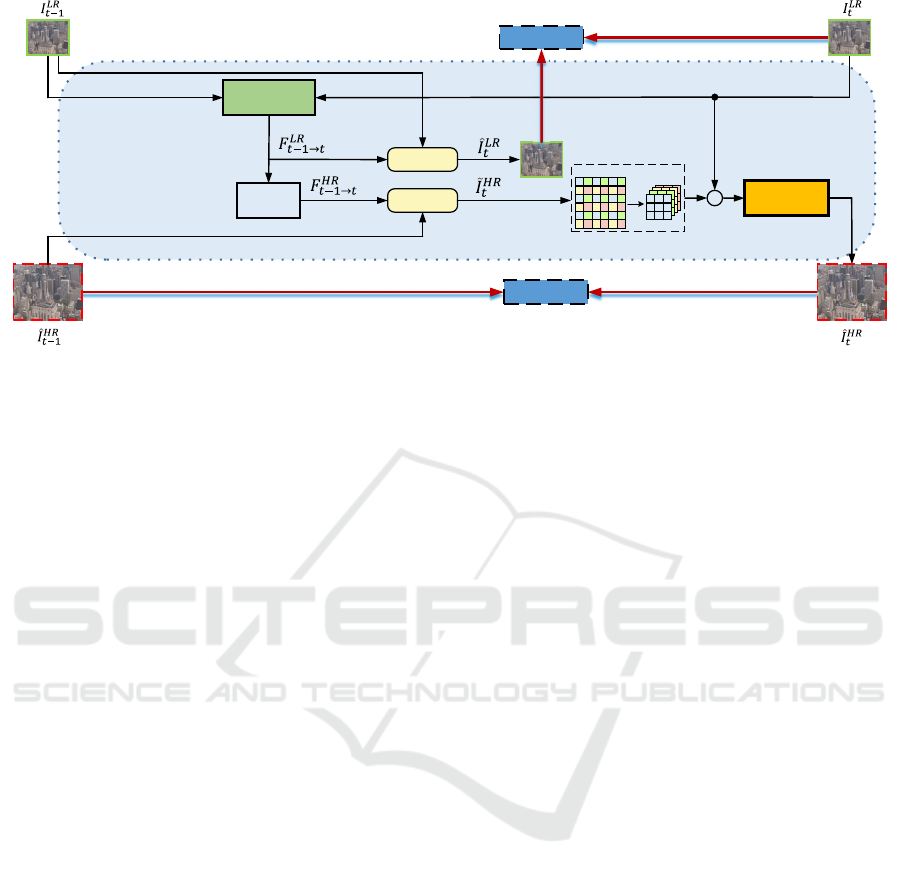
VSRRecurrentFramework
Figure 1: Overall of the RepVSR model. In the figure, green rectangles and red dash-lined rectangles represent the LR input
frames and HR predicted frames, respectively.
and effectiveness of our proposed REPVSR network,
which surpass recent re-parameterization schemes
and lightweight VSR models, close to the large pa-
rameter model.
2 RELATED WORK
2.1 Deep-Learning Based Video
Super-Resolution
Recently, deep-learning based VSR algorithms have
risen rapidly. Existing VSR approaches can be mainly
divided into sliding-window methods and recurrent
methods. Sliding-window framework compute opti-
cal flows between multi-frames to aggregate informa-
tion and perform spatial warping for alignment(Haris
et al., 2019; Xue et al., 2019). Deformable con-
volution networks have been developed to address
feature misalignment(Wang et al., 2019; Tian et al.,
2020). Recurrent VSR structures can pass the pre-
vious HR estimate directly to the next step, recreat-
ing fine details and producing temporally consistent
videos. FRVSR(Sajjadi et al., 2018) stores the HR es-
timate of the previous frame and uses it to generate the
subsequent frame. Some bidirectional recurrents such
as BasicVSR(Chan et al., 2021; Chan et al., 2022) can
enforce the forward and backward consistency of the
LR warped inputs and HR-predicted frames.
2.2 Structural Re-Parameterization
Techniques
There are several studies on re-parameterization have
shown their effectiveness on high-level vision tasks
such as image classification, object detection and se-
mantic segmentation. DiracNet(Zagoruyko and Ko-
modakis, 2017) builds deep plain models by encod-
ing the kernel of convolution layers, getting com-
parable performance of ResNet. Related to Dirac-
Net, RepVGG(Ding et al., 2021b) firstly proposed
a structural re-parameterization technique. AC-
Net(Ding et al., 2019) and ExpandNet(Marnerides
et al., 2018) can also be viewed as structural re-
parameterization. Previous re-parameterizaton meth-
ods are mainly employed on high-level vision tasks
and super-resolution tasks. In this paper, we embed
re-parameterization mechanism into recurrent video
super-resolution framework, proposing light-weight
VSR model without introducing additional cost in the
inference stage.
3 PROPOSED METHOD
Our REPVSR is based on recurrent framework
as Figure1 illustrates. Specifically, we employ
re-parameterization mechanism to design optical
flow estimation network (RepFlowNet) and super-
resolution network (RepSRNet).
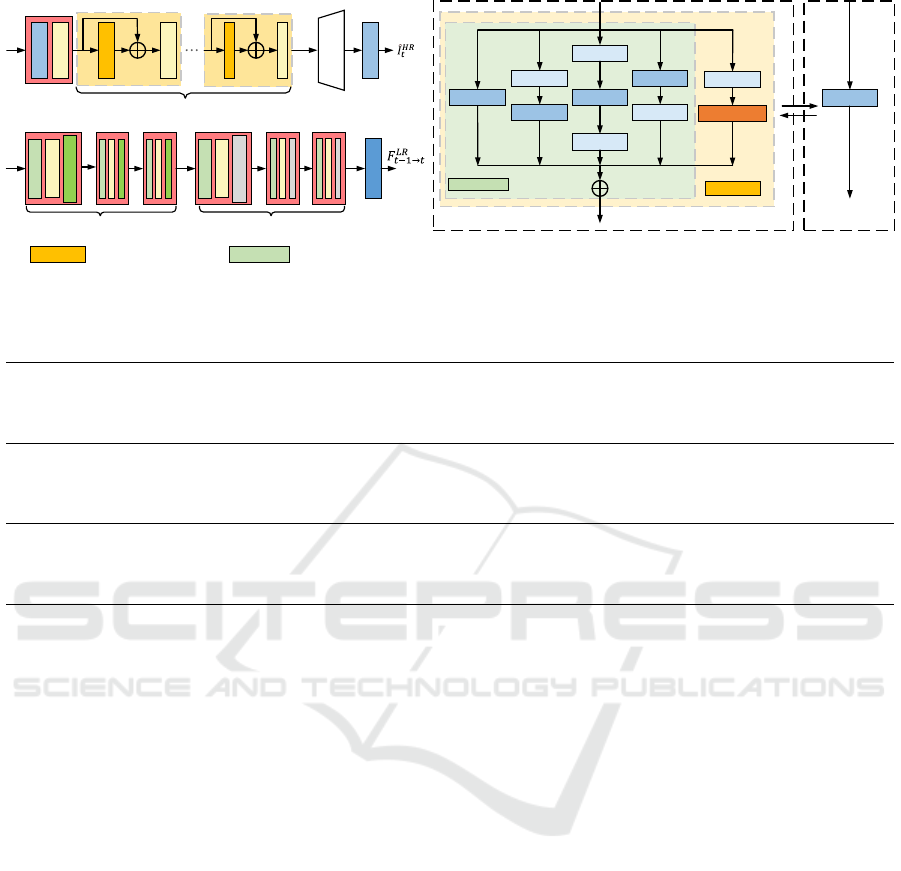
3.1 Multi-Branch Training Block
As Figure 2 (a) and (b) show, the design of RepSRNet
follows residual architectures (Sajjadi et al., 2017)
and RepFlowNet uses encoder-decoder style architec-
ture. Inspired by Diverse Branch Block (DBB) (Ding
et al., 2021a) which enhances the representational ca-
pacity of a single convolution by combining diverse
branches of different scales and complexities, we in-
REPVSR: Efficient Video Super-Resolution via Structural Re-Parameterization
541

troduce SRMB and FNMB in this paper. Figure 2 (c)
illustrates the architecture of SRMB and FNMB block
which are summarized as follows:
Component I: Common 3 ×3 Convolution. A com-
mon 3 × 3 convolution W
0
∈ R
D×C×3×3
is employed
to C-channel input I ∈ R
C×H×W
to ensure the base
performance. The bias B
0
is added onto the results of
convolution. The convolution operation is formulated
as:
O = W
0
∗ I + B
0
(1)
Component II: A conv for Sequential Convolu-
tions. We merge a sequence of 1 × 1 conv - 3 × 3
conv, 3 × 3 conv - 1 × 1 conv and 1 × 1 conv - 3 × 3
conv - 1 ×1 conv into one 3×3 conv as wider features
can improve the expressions. Take the first sequence
as example, W
(1)
∈ R
C×D×3×3
and W
(2)
∈ R
D×C×1×1
represent 1 × 1 and 3 × 3 convolution kernel respec-
tively to expand and squeeze features. The feature is
extracted as:
O
′
= W
(2)
∗ (W
(1)
∗ I + B
(1)
) + B
(2)
(2)
The other two sequence of can be merged follow-
ing the same mechanism detailed above.
Component III: A conv for Convolution with
Laplacian. Since the Laplacian filter is useful for
finding the fine details of a video frame (Jian et al.,
2008), we first employ 1 × 1 conv (the weights and
bias are W
l
and B
l
) and then use the Laplacian filter
(denoted as D
lap
) to extract spatial derivative (Zhang
et al., 2021). The edge information feature is formu-
lated as follows.
O
lap
= (S
lap
· D
lap
) ⊗ (W
l
∗ I + B
l
) + B
lap
(3)
where S
lap
and B
lap
respectively represent scal-
ing factors and bias of depth-wise convolution, and ⊗
means depth-wise convolution (DWConv).
In general, the output of FNMB is the combination of
the first two components and the output of SRMB is
the combination of all three components.
3.2 Re-Parameterization for VSR
Inference
We re-parameterize FNMB and SRMB into a sin-
gle 3 × 3 convolution for efficient inference. The se-
quence of 1× 1 conv - 3 × 3 conv in component II can
be merged into one single normal convolution with
parameters W
1
, B
1
.
W
1
= perm(W
(1)
) ∗W
(2)
B
1
= W
(2)
∗ rep(B
(1)
) + B
(2)
, (4)
where perm represents the permute operation and
rep means using spatial transmission to replicate the
bias to specified dimension. Similarly, the sequence
3 × 3 conv - 1 × 1 conv and 1 × 1 conv - 3 × 3 conv
- 1 × 1 conv can be merged as W
2
, B
2
and W
3
, B
3
. As
for component III that employ 1 × 1 conv and 3 × 3
DWConv, we have:
W
lap
[i, i, :, :] = (S
lap
· D
lap
)[i, 1, :, :]
W
lap
[i, j, :, :] = 0, i ̸= j, (5)
where W
lap
denotes the weight of convolution
which is equal to DWConv and i, j represent the num-
ber of channel. Thus, the weights of FNMB after re-
parameterization is:
W
FNMB
=
3
∑
i=0
{W
i
}, B
FNMB
=
3
∑
i=0
{B
i
} (6)
and the weights of SRMB after re-parameterization
is:
W
SRMB
=
3
∑
i=0
{W
i
} + perm(W
l
) ∗W
lap
,
B
SRMB
=
3
∑
i=0
{B
i
} + perm(B
l
) ∗ B
lap
(7)
The output feature of the multibranch architecture
can be obtained by using single normal convolution in
inference time by re-parameterzation technique.
3.3 Loss Function
As Figure 1 illustrates, there are two streams during
training stage: the HR and LR frames. The loss on HR
frames L
SR
is compute between the output of RepSR-
Net and the HR frames. I
HR
t
denotes the ground truth
frame and
ˆ
I
HR
t
denotes the generated frame at time t.
Since optical flow of our video dataset do not have
ground truth, we utilize the warped LR frames from
t − 1 to t as the loss function of RepFlowNet L
Flow
.
For each recurrent step, the SR loss and Flow loss are
calculated as:
L
SR
= ∥
ˆ
I
HR
t
− I
HR
t
∥
2
2
(8)
and also:
L
Flow
= ∥warp(I
LR
t−1
, F
LR
t−1→t
) − I
LR
t
∥
2
2
. (9)
Where warp(·) represents warp operation. In all,
the overall loss function for training are combined as:
L
total
= L
SR
+ L
Flow
(10)
4 EXPERIMENTS
4.1 Experiment Settings
4.1.1 Baseline Methods
The most popular dataset for testing is Vid4, more
high-frequency details included than other datasets.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
542
Conv
ReLU
SRMB
ReLU
PixelShuffle
6Residualblocksintotal
Conv
FNMB
LeakyRelu
Maxpool2x
Encoder
Decoder
Tanh
FNMB
LeakyRelu
Biliner2x
Conv3x3
Conv1x1
Laplacian
Conv3x3
Conv3x3
Conv3x3
Conv1x1
Conv1x1
Conv3x3
Conv1x1
Conv1x1
FNMB
SRMB
FNMBSRMB SRMulti‐BranchBlock FlowNetMulti‐BranchBlock
(a)
(b)
(c)
TrainingTime
InferenceTime
Figure 2: Network architectures for RepSRNet and RepFlowNet. The sub-figure (c) detail the re-parameterization block
embedded in RepSRNet and RepFlowNet (SRMB and FNMB, respectively).
Table 1: Quantitative comparisons of several benchmark on PSNR|SSIM values.
Scale
Dataset
PSNR/SSIM
Bicubic VESPCN SOFVSR FRVSR TecoGAN BasicVSR REPVSR
x4
Vid4 23.53/0.628 25.35/0.756 26.01/0.772 26.69/0.822 25.89/0.737 27.24/0.825 26.85/0.817
Vimeo-90k 31.32/0.868 33.55/0.907 34.89/0.923 35.64/0.932 34.27/0.925 37.18/0.945 35.62/0.928
x2
Set14 31.85/0.802 32.99/0.872 33.23/0.916 32.18/0.917 32.22/0.922 33.63/0.949 33.02/0.926
Vimeo-90k 36.52/0.871 37.76/0.899 37.53/0.938 37.71/0.941 38.01/0.945 38.27/0.960 37.65/0.953
Thus, Vid4 is frequently used for evaluating the per-
formance of VSR methods. Vimeo-90K and set15
includes videos with hard and real scenes, which is
challenging for VSR methods. So we choose these
three datasets as testing data in the following section.
Several DL-based methods are selected for com-
parison, including VESPCN(Caballero et al., 2017),
SOFVSR(Wang et al., 2020), FRVSR(Sajjadi et al.,
2018), TecoGAN(Chu et al., 2020). The reason for
this selection is that we take the number of model pa-
rameters into consideration, the parameters of the se-
lected models is similar to or larger than the model
proposed in this paper. the BasicVSR(Chan et al.,
2021) we chosen here is to verify the numerical met-
rics gap between our proposed method and leading
large parameter model like BasicVSR.
4.1.2 Implementation Details
We conduct experiments on data captured from 40
high-resolution videos (720p, 1080p and 4K) down-
loaded from vimeo.com. We apply Gaussain blur
with standard deviation σ = 1.5 to the HR frames and
downsample them by 4× to produce the input LR
videos, also knows as Blur Down(BD). Our model
is implemented with Pytorch framework on the PC
with a single NVIDIA GeForce GTX 2080Ti GPU.
The Adam optimizer is used to train the network with
β
1
= 0.9 and β
2
= 0.999 with a basic learning rate of
0.0001 and it is decayed by 0.5 every 150000 itera-
tions. We choose the size of the mini-batch as 4 and
the total number of iterations as 4e5.
4.2 Evalution Results and Discussion
4.2.1 Quantitative Results and Qualitative
Evaluations
As Table 1 shows, the quantitative metrics peak
pixel-to-noise ratio (PSNR) and structural similar-
ity (SSIM) are computed on RGB-channels for an
objective assessment of VSR image quality in Vid4
datasets and Vimeo-90k test part in BD method.
(1) Compared with competitive lightweight VSR
networks, our REPVSR obtains 0.46dB gain on Vid4
over FRVSR, and also has huge advantages over other
compared models. Note that, different from origi-
nal network FRVSR, we merely depoly SRMB and
FNMB technique on the shortened backbone network,
and we obtain superior performance while only con-
suming a fraction of FLOPs of the original FRVSR
network.
(2) It is interesting that our small model, de-
spite being much more efficient, gets very close re-
REPVSR: Efficient Video Super-Resolution via Structural Re-Parameterization
543

GTFRVSR TecoGAN
VESPCN
SOFVSR Ours
Bicubic
GT
FRVSR
TecoGAN
VESPCN SOFVSR
Ours
Bicubic
Figure 3: Qualitative comparison on Vid4.
Table 2: Comparision of running time (in seconds).
Method Parameters(M) Source Target FLOPs(G) FPS (GPU)
VESPCN
320× 180 720p 96.56 48.48
0.879 480× 270 1080p 221.08 24.76
960× 540 4K 886.47 6.78
SOFVSR
320× 180 720p 226.12 13.31
1.640 480× 270 1080p 508.78 5.993
960× 540 4K 2035.11 1.73
FRVSR
320× 180 720p 190.81 31.16
2.589 480× 270 1080p 429.30 15.10
960× 540 4K 1718.65 3.76
TecoGAN
320× 180 720p 190.81 31.15
2.589 480× 270 1080p 429.30 15.05
960× 540 4K 1718.65 3.74
RepVSR
320× 180 720p 29.435 96.76
0.274 480× 270 1080p 66.228 37.52
960× 540 4K 264.926 14.36
sults compared to the much larger model, like Ba-
sicVSR on the validation datasets, demonstrating that
our REPVSR method can make better use of the re-
parameterized structure of the network and increases
the efficiency of the learned network parameters.
From the objective results, the above quantitative
evaluation is consistent with the qualitative evaluation
show in Figure 3. We can see that our models are able
to recover fine details and produce visually pleasing
results. REPVSR achieves the most restoration ability
while maintaining a slim framework.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
544

4.2.2 Running Time Analysis
The running frame rates of different VSR models dur-
ing inference stage will be presented in this part. The
experimental results are shown in Table 2. The sec-
ond column lists the parameters of each VSR model
and column 5 counts the statistics of correspond-
ing computation cost. The total computation cost
required by our REPVSR during inference time is
only 31.17% of VESPCN, 16.71% of SOFVSR, and
10.58% of FRVSR and TecoGAN. Not to mention
REPVSR, which has a very large parameter of 338.5G
FLOPS. The last columns illustrate the average FPS
in different resolutions, When generating 1080p def-
inition video, the proposed method can run in real
time on NVIDIA Geforce GTX 1080 level graphics
cards. Due to the implementation of structural re-
parameterization, our REPVSR model runs two times
and even much more faster on GPU platform com-
pared with other deep models.
5 CONCLUSION
In this paper, we design a recurrent VSR net-
work based on re-parameterization (REPVSR) to re-
parameterize models with a multi-branch design. The
positive results show favorable speed-accuracy trade-
off compared to existing VSR models. In the future,
we aim to embed re-parameterization mechanism to
other efficient VSR architecture.
REFERENCES
Caballero, J., Ledig, C., Aitken, A., Acosta, A., Totz, J.,
Wang, Z., and Shi, W. (2017). Real-time video super-
resolution with spatio-temporal networks and motion
compensation. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition,
pages 4778–4787.
Chan, K. C., Wang, X., Yu, K., Dong, C., and Loy, C. C.
(2021). Basicvsr: The search for essential components
in video super-resolution and beyond. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 4947–4956.
Chan, K. C., Zhou, S., Xu, X., and Loy, C. C. (2022). Ba-
sicvsr++: Improving video super-resolution with en-
hanced propagation and alignment. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 5972–5981.
Chu, M., Xie, Y., Mayer, J., Leal-Taix
´
e, L., and Thuerey,
N. (2020). Learning temporal coherence via self-
supervision for gan-based video generation. ACM
Transactions on Graphics (TOG), 39(4):75–1.
Ding, X., Chen, H., Zhang, X., Huang, K., Han, J.,
and Ding, G. (2022). Re-parameterizing your op-
timizers rather than architectures. arXiv preprint
arXiv:2205.15242.
Ding, X., Guo, Y., Ding, G., and Han, J. (2019). Acnet:
Strengthening the kernel skeletons for powerful cnn
via asymmetric convolution blocks. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 1911–1920.
Ding, X., Zhang, X., Han, J., and Ding, G. (2021a). Diverse
branch block: Building a convolution as an inception-
like unit. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
10886–10895.
Ding, X., Zhang, X., Ma, N., Han, J., Ding, G., and Sun,
J. (2021b). Repvgg: Making vgg-style convnets great
again. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
13733–13742.
Fuoli, D., Danelljan, M., Timofte, R., and Van Gool,
L. (2023). Fast online video super-resolution with
deformable attention pyramid. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision, pages 1735–1744.
Haris, M., Shakhnarovich, G., and Ukita, N. (2019).
Recurrent back-projection network for video super-
resolution. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 3897–3906.
Jian, S., Xu, Z., and Shum, H. Y. (2008). Image super-
resolution using gradient profile prior. In 2008 IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition (CVPR 2008), 24-26 June
2008, Anchorage, Alaska, USA.
Liu, H., Zhao, P., Ruan, Z., Shang, F., and Liu, Y. (2021).
Large motion video super-resolution with dual subnet
and multi-stage communicated upsampling. In Pro-
ceedings of the AAAI conference on artificial intelli-
gence, volume 35, pages 2127–2135.
Marnerides, D., Bashford-Rogers, T., Hatchett, J., and De-
battista, K. (2018). Expandnet: A deep convolu-
tional neural network for high dynamic range expan-
sion from low dynamic range content. In Computer
Graphics Forum, volume 37, pages 37–49. Wiley On-
line Library.
Sajjadi, M. S., Scholkopf, B., and Hirsch, M. (2017). En-
hancenet: Single image super-resolution through au-
tomated texture synthesis. In Proceedings of the IEEE
International Conference on Computer Vision, pages
4491–4500.
Sajjadi, M. S., Vemulapalli, R., and Brown, M. (2018).
Frame-recurrent video super-resolution. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 6626–6634.
Tian, Y., Zhang, Y., Fu, Y., and Xu, C. (2020). Tdan:
Temporally-deformable alignment network for video
super-resolution. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition, pages 3360–3369.
Wang, L., Guo, Y., Liu, L., Lin, Z., Deng, X., and An, W.
(2020). Deep video super-resolution using hr optical
REPVSR: Efficient Video Super-Resolution via Structural Re-Parameterization
545

flow estimation. IEEE Transactions on Image Pro-
cessing, 29:4323–4336.
Wang, X., Chan, K. C., Yu, K., Dong, C., and Change Loy,
C. (2019). Edvr: Video restoration with enhanced de-
formable convolutional networks. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition Workshops, pages 0–0.
Xia, B., He, J., Zhang, Y., Wang, Y., Tian, Y., Yang, W.,
and Van Gool, L. (2023). Structured sparsity learning
for efficient video super-resolution. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 22638–22647.
Xue, T., Chen, B., Wu, J., Wei, D., and Freeman, W. T.
(2019). Video enhancement with task-oriented flow.
International Journal of Computer Vision, 127:1106–
1125.
Zagoruyko, S. and Komodakis, N. (2017). Diracnets:
Training very deep neural networks without skip-
connections. arXiv preprint arXiv:1706.00388.
Zhang, X., Zeng, H., and Zhang, L. (2021). Edge-oriented
convolution block for real-time super resolution on
mobile devices. In Proceedings of the 29th ACM In-
ternational Conference on Multimedia, pages 4034–
4043.
Zhou, D., Gu, C., Xu, J., Liu, F., Wang, Q., Chen, G.,
and Heng, P.-A. (2023). Repmode: Learning to re-
parameterize diverse experts for subcellular structure
prediction. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 3312–3322.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
546
