
AI-Informed Interactive Task Guidance in Augmented Reality
Viacheslav Tekaev
a
and Raffaele de Amicis
b
Oregon State University, Corvallis, U.S.A.
{tekaevv, deamicisr}@oregonstate.edu
Keywords:
Augmented Reality, Artificial Intelligence, Task Guidance System, 3D Positioning, Oculus Quest Pro,
Adaptive Feedback, Calibration and Synchronization.
Abstract:
This paper presents a proof of concept for an augmented reality (AR) and artificial intelligence (AI)-powered
task guidance system, demonstrated through the task of opening a door handle. The system integrates an AR
frontend, deployed on an Oculus Quest Pro, with an AI backend that combines computer vision for real-time
object detection and tracking, and natural language processing (NLP) for dynamic user interaction. Objects
such as door handles are identified using YOLOv8-seg, and their 3D positions are calculated to align with
the user’s environment, ensuring accurate task guidance. The AI backend supports local and cloud process-
ing, maintaining performance even without internet connectivity. The system provides adaptive feedback,
adjusting guidance based on user actions, such as correcting improper rotation of a knob. Real-time com-
munication between components is achieved via WebSocket, minimizing latency. Technical challenges like
tracking accuracy, latency, and synchronization are addressed through calibration and stress testing under vary-
ing conditions. The study emphasizes the system’s adaptability to complex scenarios, offering error-handling
mechanisms and smooth interaction through AR overlays. This proof of concept highlights the potential of
AR-AI integration for task guidance in diverse applications.
1 INTRODUCTION
Task guidance plays a critical role in a variety
of fields, from manufacturing and maintenance to
healthcare and education (Mendoza-Ram
´
ırez et al.,
2023; Lapointe et al., 2020). Effective task guid-
ance systems enable users to perform complex pro-
cedures by providing step-by-step instructions, ensur-
ing accuracy, and efficiency, and reducing the like-
lihood of errors (Sim
˜
oes et al., 2019). Tradition-
ally, such guidance has been delivered through man-
uals, videos, or expert system supervision (Osti et al.,
2021; Tarallo et al., 2018). However, these methods
can be limited in real-time adaptability and contextual
understanding, especially in dynamic environments
(Sim
˜
oes et al., 2021).
Recent augmented reality (AR) advancements
have introduced new possibilities for task guidance by
overlaying digital information directly onto the physi-
cal world (Morales M
´
endez and del Cerro Vel
´
azquez,
2024). AR enhances the user’s perception of their
environment by providing contextual, visual instruc-
tions that are interactive and intuitive. This immersive
a
https://orcid.org/0009-0007-1692-5840
b
https://orcid.org/0000-0002-6435-4364
approach has the potential to transform how users re-
ceive guidance, enabling them to complete tasks with
greater spatial awareness and precision (Henderson
and Feiner, 2011; Funk et al., 2015).
Incorporating artificial intelligence (AI) into AR
systems further enhances these capabilities. AI algo-
rithms can process and interpret the physical environ-
ment, recognize objects, detect user actions, and adapt
the guidance provided in near real-time (Castelo et al.,
2023). This combination of AR and AI creates an in-
telligent task guidance system that instructs users and
responds dynamically to their needs and interactions
(Stover and Bowman, 2024).
This paper presents a proof of concept for such an
advanced AR system, demonstrating its application in
a specific task: guiding a user to open the handle of
a door. This scenario provides a controlled environ-
ment to showcase how AR and AI can work together
to deliver effective real-time task guidance, illustrat-
ing the potential of these technologies to improve task
performance across diverse use cases.
Tekaev, V. and de Amicis, R.
AI-Informed Interactive Task Guidance in Augmented Reality.
DOI: 10.5220/0013187800003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 101-112
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
101

2 BACKGROUND
The concept of employing AR technologies to en-
hance real-world experiences by integrating virtual
content has roots stretching back to the last century.
These systems are designed to have an internal model
of the physical environment, allowing them to overlay
digital information seamlessly onto the user’s field of
view. By integrating real-time data with a contextual
understanding of the surroundings, AR can augment
what the user sees, making interactions with both the
digital and physical worlds more immersive and in-
tuitive. This makes AR a perfect visualization in-
strument for a task guidance system. (Van Krevelen,
2007)
Augmented reality has shown potential in reduc-
ing cognitive load and errors across various domains
(Buchner et al., 2022; Puladi et al., 2022). Studies
indicate that AR can decrease the extraneous cogni-
tive load in learning environments (Thees et al., 2020;
Herbert et al., 2022) and assembly tasks (Yang et al.,
2019). In industrial settings, AR glasses have been
found to lower cognitive load for assembly operators
(Atici-Ulusu et al., 2021). AR assistance can improve
performance by shortening task completion time and
reducing mistakes in assembly processes (Yang et al.,
2019). In circuit prototyping, AR visual instructions
have demonstrated effectiveness in reducing errors
and mental workload for novice users (Bellucci et al.,
2018). Moreover, AR has proven useful in real-time
fault detection and analysis in manufacturing (Becher
et al., 2022; Fiorentino et al., 2014). The authors pro-
pose a method that integrates spatio-temporal analy-
sis of time series data through a handheld touch de-
vice with augmented reality to implement visual anal-
ysis on the shop floor, enabling real-time responses to
faults. The approach was designed and tested on an
active production line. However, some research sug-
gests that AR’s impact on cognitive load may vary
depending on task complexity and design (Buchner
et al., 2022). While AR shows promise in reducing
cognitive load, its effects on performance are not al-
ways significant (Moncur et al., 2023), highlighting
the need for further research and optimized AR de-
sign in various applications.
The integration of machine learning into AR sys-
tems is enabling more adaptive, personalized, and im-
mersive user experiences that can transform the way
individuals interact with digital and physical environ-
ments. By enabling more accurate and real-time ob-
ject recognition and environmental understanding, AI
allows AR applications to overlay digital information
more precisely onto the physical world. Addition-
ally, AI provides adaptive and personalized user ex-
periences in AR through machine learning algorithms
that learn from user interactions, improving usability
and enabling natural interfaces like voice and gesture
recognition. (Park et al., 2020) showed in their paper
how to apply task guidance visual clues to real-world
objects in a hand held mobile device with a camera
based on a reconstructed 3D model of the target ob-
ject using deep learning and RGB-D data from the
integrated camera. The system detects and segments
real-world objects using Mask-RCNN, allowing the
extraction of corresponding 3D point cloud data. The
virtual model is spatially matched with the real object
using the 3D position and pose of the real object. Re-
cent research explores the integration of AI with AR
for task guidance in multiple direction. AI enhances
AR systems by improving user activity recognition,
and adaptive guidance (Ng et al., 2020; Truong-Alli
´
e
et al., 2021). These AI-AR systems show promise in
various applications, including maintenance, assem-
bly, and manufacturing (Lapointe et al., 2020; Chan-
dan K. Sahu and Rai, 2021). Studies demonstrate that
AI-enhanced AR guidance can significantly improve
task performance and learning outcomes (Westerfield
et al., 2013). Researchers have developed frame-
works and systems to automate workflow modeling,
task monitoring, and guidance generation (Han et al.,
2017; Konin et al., 2022). Visualization tools have
been created to support the development and analysis
of AI-AR assistants (Castelo et al., 2023). While chal-
lenges remain, the integration of AI with AR shows
potential for revolutionizing task guidance across var-
ious industries by providing more efficient, adaptive,
and context-aware support to users.
One of the key challenges in AR task guidance
systems is ensuring that the system can quickly and
accurately detect and understand real-world objects
in a scene, enabling a seamless interaction between
the physical and digital worlds. For example, ob-
ject detection and instance segmentation algorithms
such as YOLOv8, MaskFormer, and Mask R-CNN
are commonly used to achieve real-time object detec-
tion and segmentation. Each of these methods has its
own strengths and weaknesses depending on the use
case. However, YOLOv8 is the fastest and most ef-
ficient of the three, making it the best option for ap-
plications that require real-time object detection with
minimal latency (Jocher et al., 2023). Mask R-CNN
is slower due to its two-step process, but it provides
excellent accuracy (He et al., 2018). Another model,
MaskFormer, is even more accurate, but because of
its precision and large and complex internal structure,
the inference speed is very low (Cheng et al., 2021).
Another important aspect in AR task guidance
systems is the capability to interpret user’s commands
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
102
and requests. Such language assistants are usually
built using natural language processing (NLP) tech-
niques. Large language models (LLMs) like LLaMA
3.1 (Dubey, 2024) and Mistral 7B (Jiang et al., 2023)
represent the state-of-the-art of modern NLP, each of-
fering distinct advantages depending on the applica-
tion. LLaMA 3.1 excels in complex tasks requiring
deeper contextual understanding. On the other hand,
Mistral is faster due to its smaller size.
Previous research often relied on mobile phones
to display AR content directly on the screen, which
can be inconvenient for users, as it requires them to
hold the device, leaving their hands unavailable for
task execution. Alternatively, custom and expensive
AR devices were used, limiting accessibility. In this
paper, we focus on a mass-market AR head-mounted
display, aiming to overcome its limitations and con-
straints to develop a proof of concept for a task guid-
ance system.
3 SYSTEM ARCHITECTURE
This section outlines the architecture of the task guid-
ance system, describing how the various compo-
nents interact to deliver real-time guidance using aug-
mented reality and artificial intelligence. The sys-
tem is designed to be modular, consisting of an AR
frontend and an AI backend, as depicted in Figure 1,
which communicate over a network to ensure seam-
less guidance for users. Each component plays a dis-
tinct role, ensuring that the system remains respon-
sive, scalable, and adaptable to different hardware se-
tups.
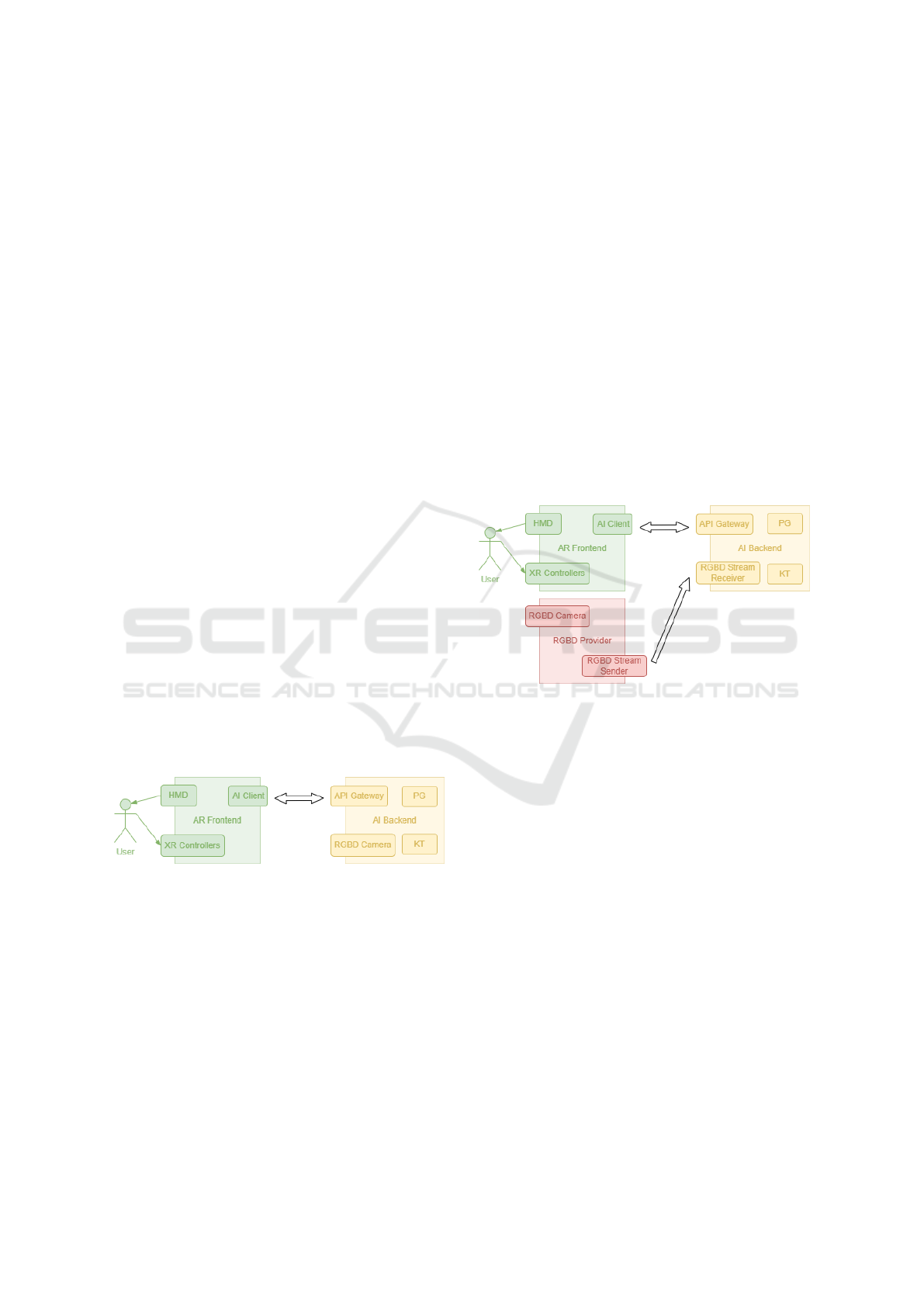
Figure 1: Overall system architecture.
The system architecture is built around two pri-
mary components:
• AI Backend: It serves as the system’s processing
hub, combining advanced algorithms for real-time
object detection, tracking, and natural language
interaction. It is responsible for handling com-
putationally intensive tasks, thus offloading the
workload from the AR frontend.
• AR Frontend: It is implemented for an Oculus
Quest Pro HMD and acts as the user interface and
controller for the system. It coordinates all task-
related processes, including managing the user in-
terface, visualizing AR guidance overlays, and
tracking user interactions through controllers or
hand tracking. Specifically, the AR frontend:
– Monitors the user’s hand movements, con-
troller positions, and headset orientation to en-
sure precise interaction with virtual objects.
– Provides real-time visual hints, such as arrows
or highlights, guiding users through each step
of the task.
– Receives data from the AI backend, including
detected object positions, their class, and their
probability.
These two components communicate over a wire-
less network, exchanging data using HTTP or Web-
Socket protocols. This setup ensures low-latency
communication, enabling the AR system to remain
responsive as users interact with the environment and
complete tasks in real-time.
Figure 2: Alternative system architecture.
3.1 Alternative Architecture for Mobile
Scenarios
In addition to the primary architecture, the sys-
tem supports an alternative configuration, depicted
in Figure 2, designed specifically for mobile and
lightweight scenarios. While the primary architecture
offers direct and efficient communication between the
AR frontend (HMD) and the AI backend, it assumes
a stationary setup, where the external RGBD cam-
era and backend server are colocated, often in a lab
or controlled environment. However, this design be-
comes impractical in scenarios that demand field op-
erations, mobility, or rapid deployment.
The primary motivation for this alternative archi-
tecture arises from a critical limitation of the Meta
Quest HMD: it does not provide access to raw video
streams from its internal cameras. While the Quest
is a mobile device capable of processing AR con-
tent, this limitation restricts its ability to use advanced
computer vision techniques that require direct control
AI-Informed Interactive Task Guidance in Augmented Reality
103

over the RGB and depth data. To overcome this con-
straint, we introduce an external RGBD camera that is
carefully calibrated with the HMD’s coordinate sys-
tem, enabling precise object detection and alignment.
However, connecting an external camera directly
to the Quest HMD is not supported. The next logi-
cal step - connecting the camera directly to the back-
end server - poses challenges when the backend is de-
ployed on a stationary PC, as the system cannot be
easily transported to environments where mobility is
essential (e.g. remote sites, field operations, or out-
door maintenance tasks).
To solve this problem, we propose a decoupled
mobile architecture that incorporates a portable inter-
mediary processing device, such as Nvidia Jetson or
Raspberry Pi, to bridge the gap between the external
camera and the AI backend. The portable device:
1. Reads and processes the video stream from the
lightweight external RGBD camera.
2. Transmits the video stream over the network to the
AI backend for further analysis and processing.
This mobile configuration offers several key bene-
fits. First, the user can move freely, as the camera
and processing device are compact and lightweight.
This makes the system ideal for use in environments
where mobility is essential, such as field operations
or remote maintenance tasks. Secondary, in this con-
figuration, the camera captures RGB and depth data,
which is transmitted to the AI backend over the net-
work for processing. The use of ZeroMQ ensures
minimal communication latency between the RGBD
provider and the AI backend, enabling real-time ob-
ject detection and segmentation.
The mobile setup is also compatible with HMDs
that feature internal RGBD cameras, allowing the sys-
tem to access the camera stream directly from the
headset. However, using an external RGBD provider
provides flexibility in scenarios where the headset’s
built-in sensors may not be sufficient.
A potential drawback of this decoupled architec-
ture is the introduction of increased latency due to the
added network communication step. While the pri-
mary architecture allows for more direct data flow, the
mobile architecture must transmit data between mul-
tiple devices, slightly impacting system responsive-
ness. Nevertheless, the trade-off in latency is offset
by the portability and flexibility gained, making the
alternative configuration suitable for tasks that require
mobility or quick deployment.
3.2 AR Frontend
The AR Frontend, displayed in Figure 3, mainly
serves as a controller for the task guidance system
processing input data from different sources and ad-
vancing the internal state machine accordingly.
Figure 3: Implemented Architecture of the AR Frontend.
First, in the idle state it waits for the command
from the user to start the guidance process. When the
start command is received it gathers all tracked ob-
jects with corresponding classes, world poses, and es-
timated bounding boxes from the AI backend. Based
on each object’s position it chooses the closest pair
of door-handle and starts guiding the user via AR ele-
ments indicating current recommended action. Exam-
ples of provided AR task guidance hints are demon-
strated in Figure 4.
3.3 AI Backend
The AI backend serves as the computational engine
of the task guidance system, managing essential pro-
cesses such as object detection, tracking, and natu-
ral language processing. It operates with a modu-
lar design, enabling tasks to be executed locally on
the hardware or, when needed, offloaded to cloud-
based services. This flexibility ensures scalability and
adaptability to various use cases and deployment en-
vironments.
The entry point to the AI backend is an API Gate-
way, which functions as a centralized interface for
routing external requests to the appropriate internal
components. This approach allows processing units
to be modified or replaced at runtime without requir-
ing reconfiguration of the user’s device. For example,
if computationally intensive tasks demand more re-
sources, they can be offloaded to cloud services, while
simpler requests are handled locally. The default op-
eration is entirely local, ensuring that the system can
function even without internet connectivity, making it
suitable for scenarios where network access is limited
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
104
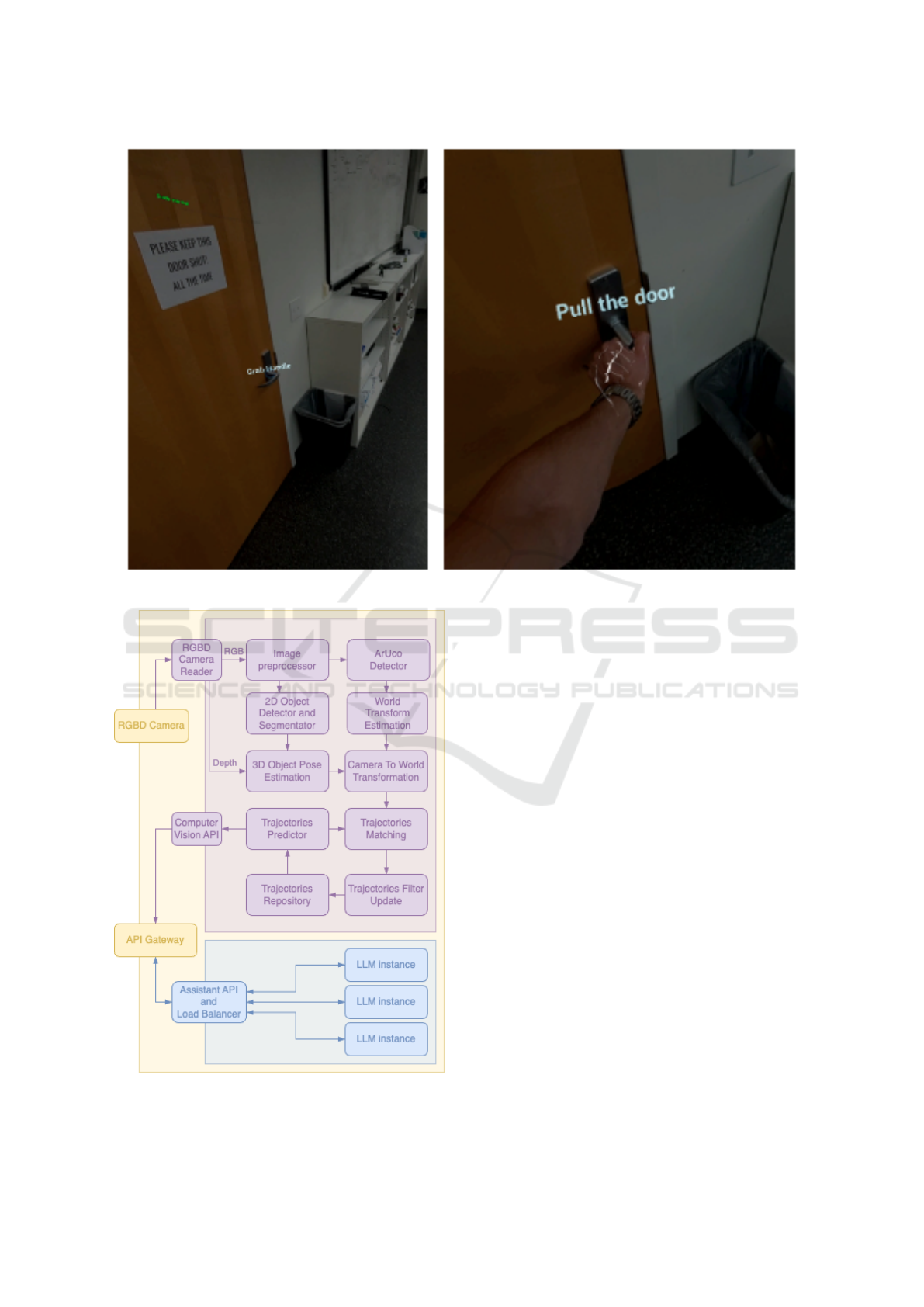
Figure 4: Screenshots from the AR headset demonstrating task guidance hints.
Figure 5: Implemented Architecture of the AI Backend.
or unreliable.
The AI backend is structured around two pri-
mary functional components. The first, known as the
perceptual grounding component, focuses on under-
standing the user’s environment. It’s main subcompo-
nent is Computer Vision subcomponent. It processes
the video feed, identifying and tracking objects such
as doors and handles. Additionally, it is responsible
for calibrating the external camera to world coordi-
nate system.
The second component of the AI backend is the
knowledge transfer module, which acts as the intel-
ligent assistant for the system. The major part of
this component is Language Assistant subcomponent.
This module leverages natural language processing
algorithms to interpret user commands and convert
them into actionable steps. When the user interacts
with the system through voice commands the knowl-
edge transfer component analyzes the input and iden-
tifies the intended action. For example, when the
user says “Open the door”, the system understands
the command and initiates the appropriate guidance
sequence.
In summary, the AI backend is a sophisticated and
modular component that ensures the system can ac-
curately perceive its environment, process user com-
mands, and provide adaptive task guidance. Its dual
subcomponents — perceptual grounding for object
AI-Informed Interactive Task Guidance in Augmented Reality
105

detection and tracking, and knowledge transfer for
NLP-based interaction — work in tandem to deliver
precise and responsive support to users. With the flex-
ibility to operate locally or integrate cloud services,
the AI backend ensures scalability and robustness,
making it a versatile solution for a wide range of task
guidance scenarios.
3.3.1 Computer Vision Subcomponent
The computer vision subcomponent is responsible for
capturing, processing, and interpreting visual infor-
mation from the physical environment to enable pre-
cise object detection and tracking. This component
relies on an external camera equipped with both a
depth sensor and a color sensor.
Before deploying the system, both the depth and
color sensors undergo calibration to estimate their in-
trinsic and extrinsic parameters. Each sensor’s intrin-
sic parameters, which describe the focal length, op-
tical center, and lens distortion, are captured in two
separate intrinsic matrices. Additionally, two arrays
store the distortion coefficients for the sensors, ac-
counting for lens-related aberrations. An extrinsic
matrix is also computed, representing the transforma-
tion required to align objects detected in the color im-
age with the corresponding depth image. For simplic-
ity and reliability, the calibration parameters used in
this system are derived directly from those provided
by the camera manufacturer.
The object detection and tracking pipeline in the
perceptual grounding component is multistaged, en-
suring accurate interpretation of the scene. The first
step involves 2D object detection on the color im-
age, where the system runs the YOLOv8-seg model
trained on custom manually labeled dataset of 3000
images to generate masks and bounding boxes for de-
tected objects. This algorithm identifies and segments
objects of interest, such as door handles, with high ac-
curacy, allowing the system to focus on relevant ele-
ments within the scene.
Once 2D detection is completed, the system aligns
the depth image with the color image using the pre-
viously calibrated intrinsic and extrinsic parameters.
This alignment ensures that the depth information
corresponds precisely with the visual data, providing
a coherent spatial representation of the scene. After
aligning the two images, the system estimates the me-
dian depth of each detected object by applying the
segmentation mask to the depth image. This median
depth value plays a critical role in the next stage of the
pipeline, where the 3D position of the detected object
is computed.
To calculate the 3D position, the system uses the
intrinsic matrix of the color sensor to map the cen-
ter of the object’s bounding box into camera coor-
dinates. This transformation allows the backend to
understand where the object is located relative to the
camera, providing the foundation for accurate object
tracking. In parallel with object detection, a calibra-
tion process operates continuously to maintain syn-
chronization between the camera frame and the world
frame. This synchronization is essential, as both the
camera and the AR frontend rely on the same spa-
tial references to ensure that virtual guidance aligns
seamlessly with the physical environment. A detailed
description of the calibration process is provided in
Subsection 3.4.
The final step is the transformation of the detected
objects’ positions from camera coordinates into the
world frame. This transformation uses the estimated
transform matrix obtained during calibration, ensur-
ing that all detected objects are referenced consis-
tently within the shared spatial framework. To keep
track of objects throughout the camera stream frames
all new detections are matched with already tracked
objects and their state is estimated using Unscented
Kalman filter (Wan and Van Der Merwe, 2000) and
constant velocity motion model. The tracked ob-
jects are then stored and made accessible to the AR
Frontend via a WebSocket connection, allowing for
real-time updates to be transmitted with minimal la-
tency. To compensate for the processing time of the
detection and tracking pipeline and possible laten-
cies in image frame acquisition we extrapolate each
detected object’s state into the future using an esti-
mated motion model state. This continuous flow of
data ensures that the task guidance system remains
responsive and adaptive, providing users with precise
instructions that align accurately with their environ-
ment.
In summary, the perceptual grounding component
plays a crucial role in the task guidance system by
combining advanced computer vision techniques with
precise calibration and spatial mapping. Through its
multistage detection pipeline, the system captures,
aligns, and interprets visual information in real time,
enabling effective guidance for users. By ensuring
synchronization between the camera frame and the
world frame, the component provides a stable foun-
dation for the AR frontend to deliver accurate and
context-aware instructions throughout the task.
3.3.2 Language Assistant Subcomponent
The knowledge transfer component contains several
open-source LLM instances behind a load balancer.
We must balance the load because one LLM instance
can process only one request at a time. The LLMs
models are fine-tuned to instruct the users based on
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
106
their inputs. Primarily for this PoC we used Llama
3.1 70B quantized as Q5 K M in GGML format and
llama.cpp as a runtime. The frontend part is capa-
ble of translating user speech into text using Voice
SDK for Unreal Engine by Meta. Then this text is
augmented with auxiliary context about the current
guidance step and a list of available functions (start
guidance, stop guidance). Based on the context and
user’s requests the assistant is capable of providing
users with the information about the guidance and en-
abling or disabling the guidance per user’s request.
The LLM’s responses are preprocessed to remove in-
ternal tags that llm might use to control guidance and
are played back to the user using text-to-speech fea-
ture of Unreal Engine.
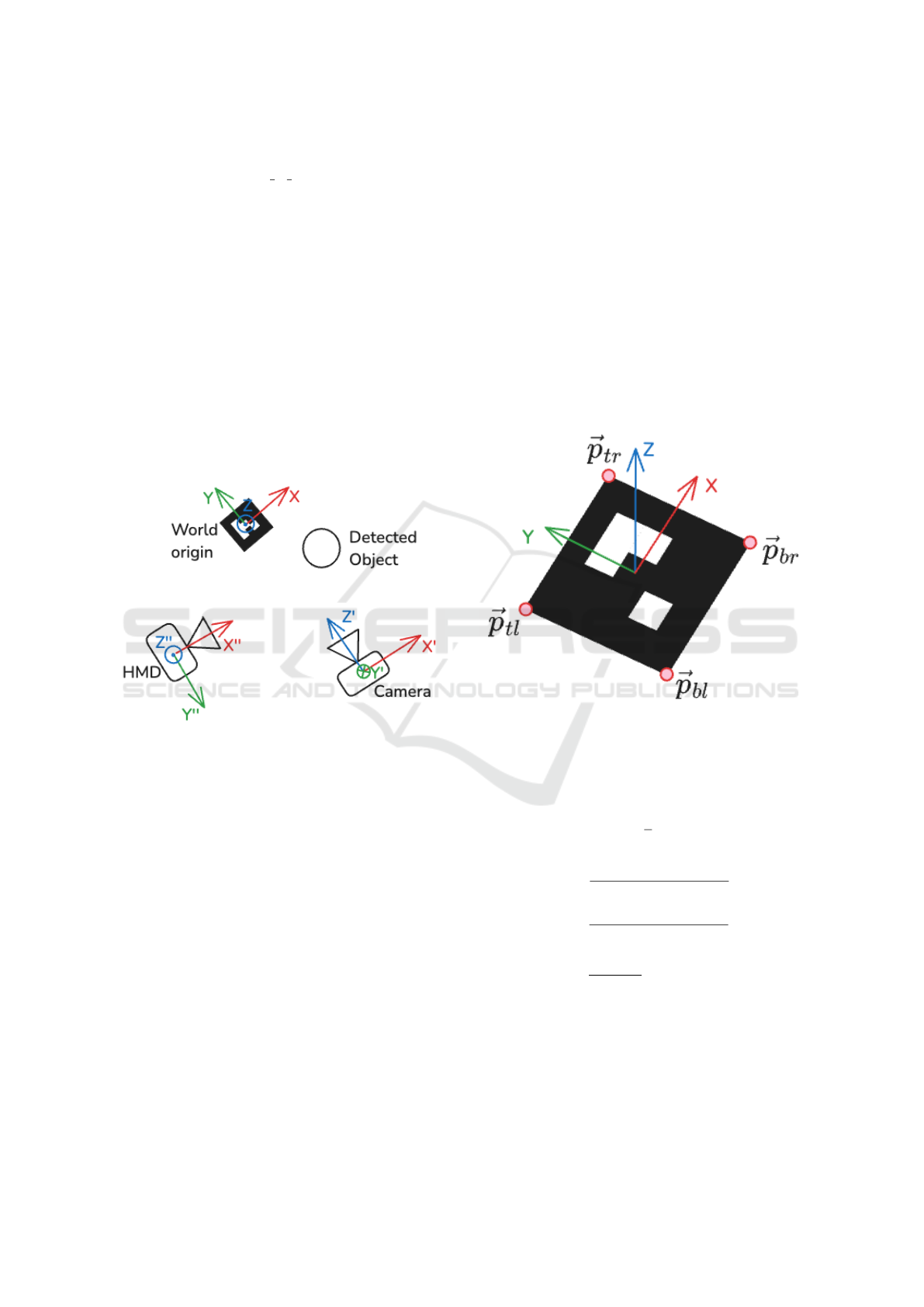
3.4 Calibration
Figure 6: Coordinate systems top-down scheme.
A crucial moment in the integration of AR Frontend
and AI Backend into one system is a coordinate cal-
ibration between them because both an HMD and
the computer vision part work in their local coordi-
nates. To address this inconsistency we propose to
track objects in a stationary reference frame (we call
it a world frame) relative to some starting point to
eliminate synchronization issues caused by the rela-
tive movement of an HMD and a camera. Then all
we need is to calibrate both an HMD and a camera to
the stationary frame using a reference point known to
both parts in their local coordinates and in the station-
ary frame. Our proposed solution is to use a station-
ary calibration board with an ArUco marker of size
0.16m*0.16m whose 6DOF pose can be estimated by
a computer vision component using the ArUco detec-
tor (Garrido-Jurado et al., 2014) during the initial-
ization stage. When the marker is detected on the
color image the transform A
′
from the camera coor-
dinate system to the world coordinate system is es-
timated using Infinitesimal Plane-Based pose estima-
tion (Collins and Bartoli, 2014). The more trickier
part is to estimate a transform from the world frame
to the HMD frame since the raw RGB stream from the
headset’s internal camera is not available for reading
nor any marker detector is provided by the manufac-
turer. To overcome this issue we decided to use an XR
controller which position is tracked by the headset’s
software relative to the HMD coordinate system by
fusing visual tracking and internal controller’s IMU.
This means that the position of the marker’s corners
in the HMD’s coordinate system can be estimated via
directly touching them by the controller as depicted
on figure 7.
Figure 7: Probed points at each ArUco marker’s corner.
In consequence, it is possible to estimate the trans-
form from the world frame to the HMD frame using
the following set of equations:
⃗
T = −
1
4
4
∑
i=1
⃗p
i
(1)
⃗
X =
⃗p
br
−⃗p
bl
+⃗p
tr
−⃗p
tl
∥⃗p
br
−⃗p
bl
+⃗p
tr
−⃗p
tl
∥
(2)
ˆ
⃗
Y =
⃗p
tr
−⃗p
br
+⃗p
tl
−⃗p
bl
∥⃗p
tr
−⃗p
br
+⃗p
tl
−⃗p
bl
∥
(3)
⃗
Z =
⃗
X ×
ˆ
⃗
Y
∥
⃗
X ×
ˆ
⃗
Y ∥
;
⃗
Y =
⃗
Z ×
⃗
X (4)
R =
⃗
X
⃗
Y
⃗
Z
(5)
A
′′
=
R
T
⃗
T
0 1
(6)
Using the described approach we can organize all
communication between the components using poses
AI-Informed Interactive Task Guidance in Augmented Reality
107

in the world coordinate system. So that the de-
tected object poses which are defined as 4x4 matrices
are transformed from the camera frame to the world
frame:
P = A
′
P
′
(7)
where P is an object’s pose in the world frame and
P’ is an object’s pose in the world frame. Then they
transferred over the network to an AR headset and
then in the AR Frontend transformed to HMD frame:
P
′′
= A
′′
P (8)
where P is an object’s pose in the world frame and P”
is an object’s pose in the HMD frame.
4 IMPLEMENTATION OF THE
PROOF OF CONCEPT
The task guidance system developed in this study is
demonstrated through the simple, yet illustrative task
of opening a door handle. Although the action of
opening a door may appear trivial, the diversity in
handle types and door mechanisms across environ-
ments makes it an ideal scenario to showcase the flexi-
bility and adaptability of the system. This section pro-
vides a detailed description of how the proof of con-
cept (PoC) was implemented, highlighting the task
flow, system interactions, and key technical consid-
erations.
The selected task involves guiding the user
through the steps required to operate different types
of handles, such as static handles, knobs, or levers.
This variety introduces different interaction patterns,
requiring the system to detect, classify, and adapt to
the type of handle present. Moreover, the task in-
volves not only recognizing the appropriate handle
but also determining additional factors such as the ro-
tation direction for knobs and levers, ensuring the user
receives correct and precise guidance.
4.1 Task Flow
The guidance sequence follows a well-defined task
flow, designed to ensure that the user completes the
door operation smoothly and efficiently. Upon ini-
tiating the guidance session, the system detects all
visible doors and handles within the scene using the
computer vision subcomponent in the AI backend. A
spatial mapping process matches the detected han-
dles with the corresponding doors to identify a suit-
able target for the user. Typically, the system se-
lects the closest door-handle pair as the target to min-
imize user effort. If the handle type requires rota-
tional movement, the system estimates the rotation di-
rection (clockwise or counterclockwise) based on the
handle’s orientation and provides corresponding guid-
ance. The system combines informed guessing and
real-time monitoring to adapt its guidance dynami-
cally. At the start of the task, the user is guided to
grasp the target handle. After the handle is grasped,
the system instructs the user to turn or pull the handle
in the required direction. The system makes an in-
formed guess about whether the user should push or
pull the door or twist the handle clockwise or counter-
clockwise. This guess serves as the starting point for
the guidance process. Once the system provides an
initial recommendation, it continuously monitors for
movement in both the handle and the door. The sys-
tem leverages the presence or absence of movement
as a key indicator to determine whether the user is
encountering difficulties. If no movement is detected
after suggesting a push or pull action within a pre-
defined duration, the system infers that the user may
be struggling and dynamically adjusts its guidance to
suggest the opposite action. For rotational actions, the
system tracks the user’s hand orientation and move-
ment relative to the handle. If no rotational motion
or progress is observed — such as when the handle
remains stationary — the system identifies this as an
incorrect turning attempt. It then adapts its guidance
to recommend the opposite direction (e.g., counter-
clockwise instead of clockwise). This dynamic, adap-
tive feedback mechanism ensures that the system can
provide corrective suggestions in real time, reducing
the likelihood of errors and enabling successful task
completion. While the approach relies on probabilis-
tic reasoning rather than absolute certainty, it provides
a practical solution to handle ambiguous scenarios in
a responsive manner.
4.2 System Workflow and Technical
Considerations
The task of opening a door can be represented as a
state machine where each state corresponds to a spe-
cific step in the interaction, and user actions or sys-
tem events trigger transitions between states. The
state diagram is available in supplemental materials.
This modular representation allows the task guidance
system to handle complex interactions efficiently by
adapting to unexpected situations. For example, the
system may detect that the user has missed a step
(e.g., attempting to turn the handle without a proper
grip) and provide updated instructions to correct the
course of action.
In addition to managing user interaction, the sys-
tem must address technical challenges such as latency
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
108
and synchronization. Real-time communication be-
tween the AI backend and the AR frontend is crit-
ical to ensure that guidance remains responsive and
aligned with the user’s movements. The WebSocket
protocol, which supports low-latency data transmis-
sion, plays a vital role in maintaining this synchro-
nization.
Another key consideration is the classification and
tracking of different handle types. The computer vi-
sion component must correctly identify the handle
type from the video feed and determine the appro-
priate interaction pattern. For static handles, the sys-
tem focuses on grip detection and pull or push guid-
ance. For knobs and levers, it analyzes the handle’s
orientation and estimates the required rotation direc-
tion. This classification enables the system to pro-
vide task-specific guidance flows, ensuring the user
receives precise instructions tailored to the situation.
The PoC also incorporates error handling mech-
anisms to account for potential misinterpretations or
deviations during task execution. For example, if the
system incorrectly estimates the rotation direction of
a knob, it immediately adjusts the guidance and sug-
gests the opposite direction. This adaptability ensures
that the task remains on track, even if initial instruc-
tions are not perfectly followed.
4.3 Interaction with the AR Frontend
The AR frontend plays a critical role in delivering
the task guidance experience by providing immersive
and intuitive visual feedback to the user. Through
the HMD, the user sees virtual overlays aligned with
physical objects, helping them understand each step
in the process. The AR frontend receives continuous
updates from the AI backend, ensuring that guidance
remains synchronized with the user’s actions.
The interaction between the user and the system
is captured in real time using hand tracking. When
the user’s hand touches the handle, the AR frontend
triggers a visual confirmation, such as a highlighted
grip or an arrow indicating the next action. As the user
proceeds through the task, the AR frontend updates
the visual hints dynamically, reflecting any changes in
the task graph or corrections provided by the guidance
system.
5 EVALUATION
To evaluate the proof of concept of the task guidance
system we measured several important metrics in dif-
ferent working conditions and various configurations.
5.1 Direct Architecture
First, we tested the architecture described in Section
3. For this architecture the external camera RealSense
D455 is connected directly to the AI Backend and the
AR Frontend is connected to the AI Backend using
5G WiFi local network. The AI Backend is connected
to the router using 1Gbit Ethernet cable. The hard-
ware for the backend is an Alienware laptop with In-
tel i9 CPU, Nvidia RTX4090 GPU and 64 GB RAM.
The AR frontend is a native android application com-
piled using Unreal Engine 5.4 that is run on Oculus
Quest Pro.
To start with, we evaluated the performance of
the AI Backend to make sure that it meets real-time
performance requirements (>20 Frames Per Second
(FPS)). Each measurement is aggregated over 1-
second window. The results are in Table 1.
Table 1: AI Backend’s FPS in Direct Mode.
# Measure Min Max Avg
1 15.55 41.61 37.75
2 22.37 36.30 36.35
3 29.96 39.81 36.86
4 27.58 42.72 38.09
5 28.53 42.16 38.63
6 24.44 36.62 34.14
7 15.38 42.97 36.76
8 26.38 35.70 32.24
9 13.83 45.74 41.25
10 17.27 44.25 39.76
One of the most important metrics for a task guid-
ance system in AR setting is accuracy of the estimated
3D position of detected objects. To evaluate it we
aligned one edge of the world frame ArUco marker
with the door’s edge as shown on Figure 8 and ben-
efiting from the fact that the door is a flat surface we
manually measured the x, y and z distances from the
marker to detected objects using ruler. For each cam-
era placement we calculated root mean squared errors
(RMSE) along each world axis in meters were using
RMSE(y, ˆy) =
s
∑
N−1
i=0
(y
i
− ˆy
i
)
2
N
(9)
where y
i
is a ground truth value, ˆy
i
- estimated value,
N - number of measurements.
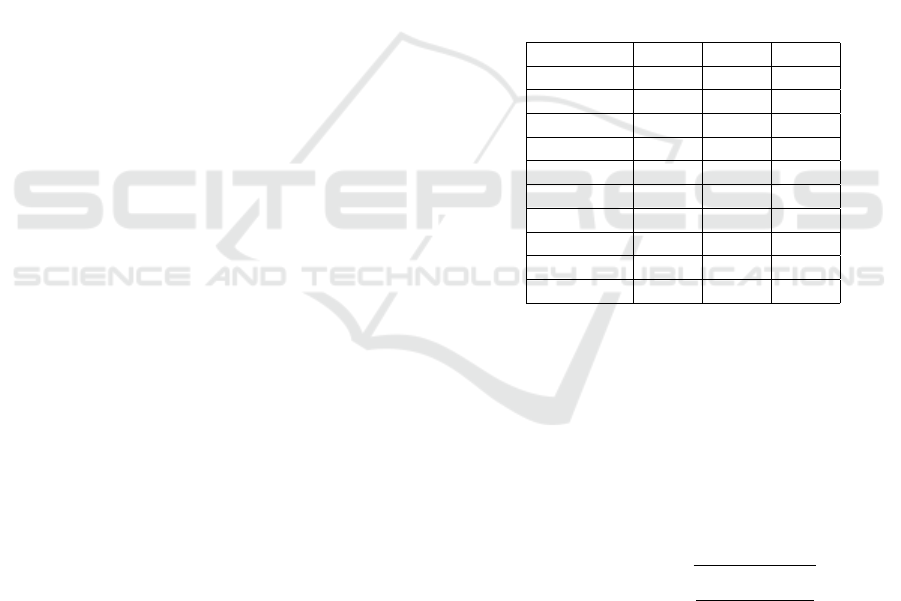
The results for different camera placements shown
in Figure 9 relative to the world frame marker are
gathered in table 2.
AI-Informed Interactive Task Guidance in Augmented Reality
109
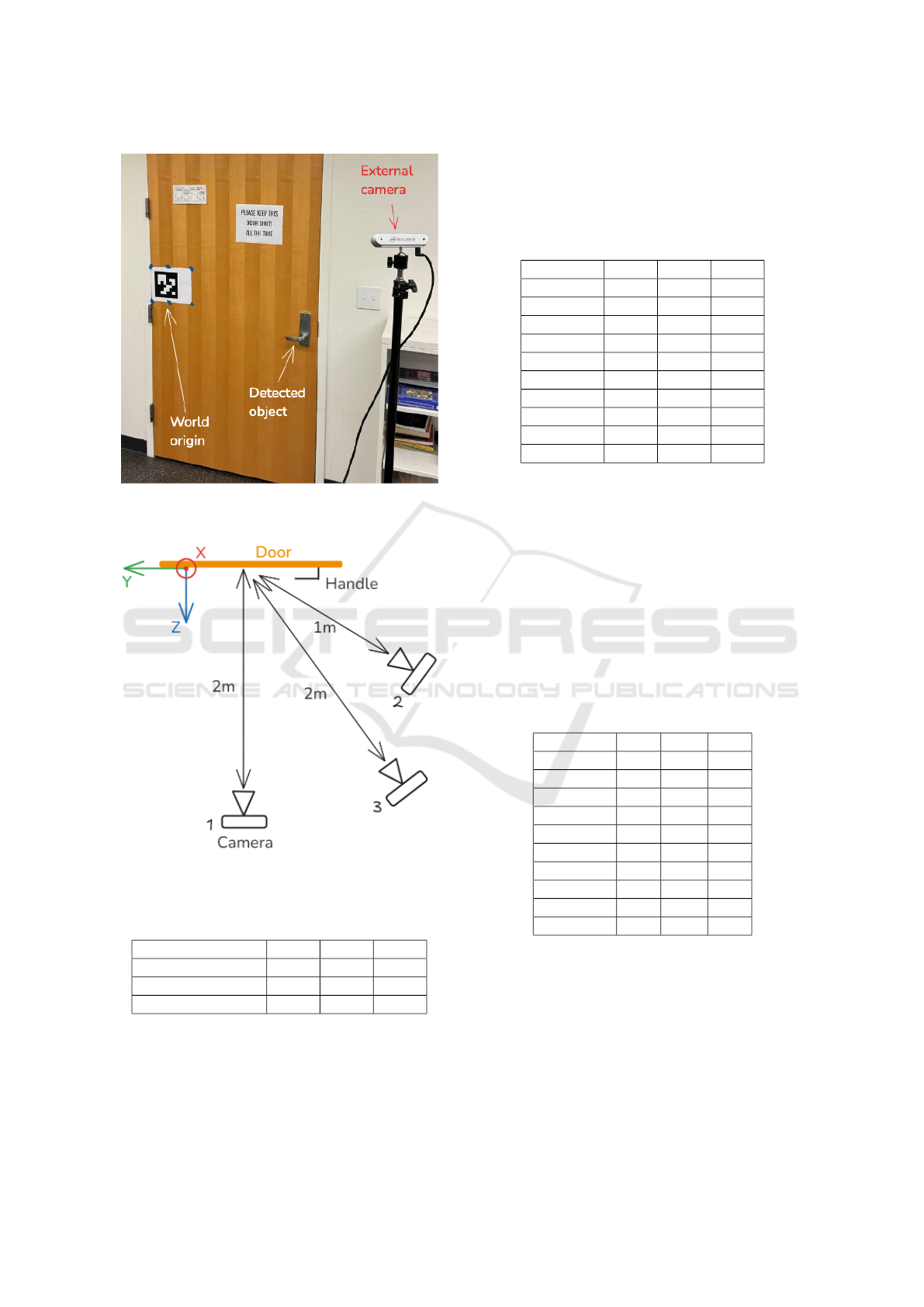
Figure 8: Setup for measuring the accuracy of the estimated
3D positions of detected objects.
Figure 9: Top-down scheme of camera placements for mea-
suring 3D position error.
Table 2: RMSE of detected handle’s 3D position in meters.
Camera Placement X Y Z
1 0.020 0.010 0.012
2 0.029 0.003 0.016
3 0.013 0.052 0.057
5.2 Mobile Architecture
Second, we tested the mobile architecture described
in Section 3.1. In this setup the hardware is the same
as in Section 5.1 except that the camera is connected
to the Nvidia Jetson Orin and the images from it are
sent over 5G WiFi to the AI backend for processing.
Again, we evaluated the performance of the AI
Backend first
Table 3: AI Backend’s FPS in Mobile mode.
# Measure Min Max Avg
1 22.38 39.22 30.20
2 30.45 41.64 37.25
3 27.56 36.73 32.44
4 22.38 39.22 30.20
5 25.88 33.51 30.28
6 28.69 42.79 36.99
7 29.03 41.66 34.35
8 24.25 50.12 40.01
9 29.03 41.66 34.35
10 22.65 38.85 28.93
Another important metric is the latency increase
which is caused by having one additional device in
the architecture that communicates over the network.
To measure latency correctly we used PTP times-
tamps (IEEE 1588) to synchronize time between the
Nvidia Jetson and the AI Backend. Each data pack-
age with data from the camera was timestamped and
time difference was calculated in the backend com-
paring current synchronized time and the timestamp
from the package. The measurements are aggregated
over 1-second windows. The results in milliseconds
are present in Table 4.
Table 4: Latency added by external camera reader device.
# Measure Min Max Avg
1 69 80 74
2 70 91 77
3 68 87 77
4 73 110 79
5 71 92 73
6 73 89 81
7 65 81 75
8 68 91 76
9 72 96 82
10 76 103 81
6 CONCLUSIONS
This paper presented and evaluated a proof of con-
cept for an AI-informed augmented reality task guid-
ance system operational on a mass-market AR head-
set Oculus Quest Pro. Demonstrated through the use
case of opening door handles, the system success-
fully provided real-time AR instructions based on the
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
110

perceived environment and user actions. The system
architecture, comprising two major components—the
AR Frontend and the AI Backend—was detailed for
both stationary and mobile scenarios. A crucial syn-
chronization mechanism between these components
was proposed and tested.
The results underscore the potential of inte-
grating AI and AR technologies to enhance task
guidance systems, offering adaptive feedback and
error-handling mechanisms in real-world applica-
tions. Technical challenges such as tracking accu-
racy, latency, and synchronization were addressed
through calibration and stress testing under vary-
ing conditions, demonstrating the system’s robustness
and adaptability.
Future work will focus on transitioning from
a manually created state machine to an automated
method for generating the task guidance graph based
on natural language task descriptions. This general-
ization will necessitate the development of a new vi-
sualization framework capable of rendering AR ele-
ments aligned with real-world objects based on the
generated graph. Moreover, we aim to explore ad-
vanced semantic scene understanding using AI-driven
assistants. Specifically, instead of relying solely
on fine-tuned YOLO models trained on predefined
datasets, we plan to leverage visual large language
models (vLLMs) that combine visual perception with
contextual understanding. By advancing these areas,
the integration of AR and AI technologies holds sig-
nificant promise for improving task guidance across
diverse applications, enhancing efficiency and reduc-
ing errors in user interactions.
ACKNOWLEDGEMENT
This publication was prepared by Oregon State Uni-
versity using Federal funds under award #07-79-
07914 from the Economic Development Administra-
tion, U.S. Department of Commerce. The statements,
findings, conclusions, and recommendations are those
of the authors and do not necessarily reflect the views
of the Economic Development Administration or the
U.S. Department of Commerce.
SUPPLEMENTAL MATERIALS
Supplemental materials are available at https://bit.ly/
3P4ClNS
REFERENCES
Atici-Ulusu, H.,
¨
Ozdemir, Y., Taskapilioglu, O., and Gun-
duz, T. (2021). Effects of augmented reality glasses
on the cognitive load of assembly operators in the au-
tomotive industry. International Journal of Computer
Integrated Manufacturing, 34:1–13.
Becher, M., Herr, D., Muller, C., Kurzhals, K., Reina, G.,
Wagner, L., Ertl, T., and Weiskopf, D. (2022). Situ-
ated Visual Analysis and Live Monitoring for Manu-
facturing. IEEE computer graphics and applications,
42(2):33—44.
Bellucci, A., Ruiz, A., D
´
ıaz, P., and Aedo, I. (2018). Inves-
tigating augmented reality support for novice users in
circuit prototyping. In Proceedings of the 2018 Inter-
national Conference on Advanced Visual Interfaces,
AVI ’18, New York, NY, USA. Association for Com-
puting Machinery.
Buchner, J., Buntins, K., and Kerres, M. (2022). The im-
pact of augmented reality on cognitive load and per-
formance: A systematic review. Journal of Computer
Assisted Learning, 38(1):285–303.
Castelo, S., Rulff, J., McGowan, E., Steers, B., Wu, G.,
Chen, S., Roman, I., Lopez, R., Brewer, E., Zhao, C.,
Qian, J., Cho, K., He, H., Sun, Q., Vo, H., Bello, J.,
Krone, M., and Silva, C. (2023). ARGUS: Visualiza-
tion of AI-Assisted Task Guidance in AR.
Chandan K. Sahu, C. Y. and Rai, R. (2021). Artificial intelli-
gence (AI) in augmented reality (AR)-assisted manu-
facturing applications: a review. International Journal
of Production Research, 59(16):4903–4959.
Cheng, B., Schwing, A. G., and Kirillov, A. (2021). Per-
Pixel Classification is Not All You Need for Semantic
Segmentation. CoRR, abs/2107.06278.
Collins, T. and Bartoli, A. (2014). Infinitesimal Plane-
Based Pose Estimation. Int. J. Comput. Vision,
109(3):252–286.
Dubey, A. (2024). The Llama 3 Herd of Models.
Fiorentino, M., Uva, A. E., Gattullo, M., Debernardis, S.,
and Monno, G. (2014). Augmented reality on large
screen for interactive maintenance instructions. Com-
puters in Industry, 65(2):270–278.
Funk, M., Mayer, S., and Schmidt, A. (2015). Using In-Situ
Projection to Support Cognitively Impaired Workers
at the Workplace. In Proceedings of the 17th Interna-
tional ACM SIGACCESS Conference on Computers &
Accessibility, ASSETS ’15, page 185–192, New York,
NY, USA. Association for Computing Machinery.
Garrido-Jurado, S., Mu
˜
noz-Salinas, R., Madrid-Cuevas, F.,
and Mar
´
ın-Jim
´
enez, M. (2014). Automatic generation
and detection of highly reliable fiducial markers under
occlusion. Pattern Recognition, 47(6):2280–2292.
Han, F., Liu, J., Hoff, W., and Zhang, H. (2017). [POSTER]
Planning-Based Workflow Modeling for AR-enabled
Automated Task Guidance. In 2017 IEEE Interna-
tional Symposium on Mixed and Augmented Reality
(ISMAR-Adjunct), pages 58–62.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2018).
Mask R-CNN.
AI-Informed Interactive Task Guidance in Augmented Reality
111

Henderson, S. J. and Feiner, S. K. (2011). Exploring the
Benefits of Augmented Reality Documentation for
Maintenance and Repair. IEEE Transactions on Vi-
sualization and Computer Graphics, 17:1355–1368.
Herbert, B., Wigley, G., Ens, B., and Billinghurst, M.
(2022). Cognitive load considerations for Augmented
Reality in network security training. Computers &
Graphics, 102:566–591.
Jiang, A. Q., Sablayrolles, A., Mensch, A., Bamford,
C., Chaplot, D. S., de las Casas, D., Bressand, F.,
Lengyel, G., Lample, G., Saulnier, L., Lavaud, L. R.,
Lachaux, M.-A., Stock, P., Scao, T. L., Lavril, T.,
Wang, T., Lacroix, T., and Sayed, W. E. (2023). Mis-
tral 7B.
Jocher, G., Qiu, J., and Chaurasia, A. (2023). Ultralytics
YOLO.
Konin, A., Siddiqui, S., Gilani, H., Mudassir, M., Ahmed,
M. H., Shaukat, T., Naufil, M., Ahmed, A., Tran, Q.-
H., and Zia, M. Z. (2022). AI-mediated Job Status
Tracking in AR as a No-Code service. In 2022 IEEE
International Symposium on Mixed and Augmented
Reality Adjunct (ISMAR-Adjunct), pages 1–2.
Lapointe, J.-F., Molyneaux, H., and Allili, M. S. (2020).
A Literature Review of AR-Based Remote Guidance
Tasks with User Studies. In Chen, J. Y. C. and
Fragomeni, G., editors, Virtual, Augmented and Mixed
Reality. Industrial and Everyday Life Applications,
pages 111–120, Cham. Springer International Pub-
lishing.
Mendoza-Ram
´
ırez, C. E., Tudon-Martinez, J. C., F
´
elix-
Herr
´
an, L. C., Lozoya-Santos, J. d. J., and Vargas-
Mart
´
ınez, A. (2023). Augmented Reality: Survey. Ap-
plied Sciences, 13(18).
Moncur, B., Galvez Trigo, M. J., and Mortara, L. (2023).
Augmented Reality to Reduce Cognitive Load in Op-
erational Decision-Making. In Schmorrow, D. D.
and Fidopiastis, C. M., editors, Augmented Cognition,
pages 328–346, Cham. Springer Nature Switzerland.
Morales M
´
endez, G. and del Cerro Vel
´
azquez, F. (2024).
Impact of Augmented Reality on Assistance and
Training in Industry 4.0: Qualitative Evaluation and
Meta-Analysis. Applied Sciences, 14(11).
Ng, L. X., Ng, J., Tang, K. T. W., Li, L., Rice, M., and
Wan, M. (2020). Using Visual Intelligence to Auto-
mate Maintenance Task Guidance and Monitoring on
a Head-mounted Display. In Proceedings of the 5th In-
ternational Conference on Robotics and Artificial In-
telligence, ICRAI ’19, page 70–75, New York, NY,
USA. Association for Computing Machinery.
Osti, F., Amicis, R., Sanchez, C. A., Tilt, A., Prather, E., and
Liverani, A. (2021). A VR training system for learn-
ing and skills development for construction workers.
Virtual Reality, 25:1–16.
Park, K.-B., Choi, S. H., Kim, M., and Lee, J. Y.
(2020). Deep learning-based mobile augmented re-
ality for task assistance using 3D spatial mapping and
snapshot-based RGB-D data. Computers and Indus-
trial Engineering, 146:106585.
Puladi, B., Ooms, M., Bellgardt, M., Cesov, M., Lipprandt,
M., Raith, S., Peters, F., M
¨
ohlhenrich, S. C., Prescher,
A., H
¨
olzle, F., Kuhlen, T. W., and Modabber, A.
(2022). Augmented Reality-Based Surgery on the
Human Cadaver Using a New Generation of Optical
Head-Mounted Displays: Development and Feasibil-
ity Study. JMIR Serious Games, 10(2):e34781.
Sim
˜
oes, B., Amicis, R., Barandiaran, I., and Posada, J.
(2019). Cross reality to enhance worker cognition
in industrial assembly operations. The International
Journal of Advanced Manufacturing Technology, 105.
Sim
˜
oes, B., Amicis, R., Segura, A., Mart
´
ın, M., and Ipi
˜
na, I.
(2021). A cross reality wire assembly training system
for workers with disabilities. International Journal
on Interactive Design and Manufacturing (IJIDeM),
15:1–12.
Stover, D. and Bowman, D. (2024). TAGGAR: General-
Purpose Task Guidance from Natural Language in
Augmented Reality using Vision-Language Models.
In Proceedings of the 2024 ACM Symposium on Spa-
tial User Interaction, SUI ’24, New York, NY, USA.
Association for Computing Machinery.
Tarallo, A., Mozzillo, R., Di Gironimo, G., and Amicis, R.
(2018). A cyber-physical system for production mon-
itoring of manual manufacturing processes. Interna-
tional Journal on Interactive Design and Manufactur-
ing (IJIDeM), 12.
Thees, M., Kapp, S., Strzys, M. P., Beil, F., Lukowicz, P.,
and Kuhn, J. (2020). Effects of augmented reality
on learning and cognitive load in university physics
laboratory courses. Computers in Human Behavior,
108:106316.
Truong-Alli
´
e, C., Paljic, A., Roux, A., and Herbeth, M.
(2021). User Behavior Adaptive AR Guidance for
Wayfinding and Tasks Completion. Multimodal Tech-
nologies and Interaction, 5(11).
Van Krevelen, R. (2007). Augmented Reality: Technolo-
gies, Applications, and Limitations.
Wan, E. and Van Der Merwe, R. (2000). The unscented
Kalman filter for nonlinear estimation. In Proceedings
of the IEEE 2000 Adaptive Systems for Signal Pro-
cessing, Communications, and Control Symposium
(Cat. No.00EX373), pages 153–158.
Westerfield, G., Mitrovic, A., and Billinghurst, M. (2013).
Intelligent augmented reality training for assembly
tasks. In Lane, H. C., Yacef, K., Mostow, J., and
Pavlik, P., editors, Artificial Intelligence in Education,
pages 542–551, Berlin, Heidelberg. Springer Berlin
Heidelberg.
Yang, Z., Shi, J., Jiang, W., Sui, Y., Wu, Y., Ma, S., Kang,
C., and Li, H. (2019). Influences of Augmented Re-
ality Assistance on Performance and Cognitive Loads
in Different Stages of Assembly Task. Frontiers in
Psychology, 10.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
112
