
Design and Development of an Interactive and Intelligent Wood
Harvester Machine Operator Simulator
Barve Pranjali Ramesh
a
, Ian Backus and Raffaele de Amicis
b
Oregon State University, Corvallis, U.S.A.
{barvep, backusi, deamicisr}@oregonstate.edu
Keywords:
Virtual Reality Training, Harvester Simulator, Forestry Machine Operation, Interactive Learning.
Abstract:
This paper presents the design and development of a virtual reality (VR) forestry harvester simulator, opti-
mized for the untethered Meta Quest. The simulator offers an immersive training environment where users
can practice essential harvester operations such as navigation, tree processing, and control of the harvester head
and boom. A comprehensive functional evaluation was conducted using 20 black-box test cases to ensure the
simulator functions as intended, with testing performed in both standalone and PC-tethered configurations.
The results confirmed the simulator’s reliability, highlighting differences in responsiveness and graphical per-
formance across configurations. With the portability and accessibility of the Meta Quest, the system provides a
flexible, cost-effective solution suitable for both training and educational applications. Future work will focus
on evaluating the usability of the system and validating its effectiveness within formal educational settings by
integrating the simulator into forestry curricula.
1 INTRODUCTION
Worldwide, forestry contributes to economic develop-
ment, environmental sustainability, and social well-
being. As of 2023, the global forestry sector was val-
ued at over $1 trillion, providing millions of jobs and
essential resources, such as timber, paper, and bioen-
ergy (Lippe et al., ). A key component of this indus-
try is the use of harvesting machines, complex and
powerful tools designed to efficiently cut and process
trees. Over time, these machines have evolved from
basic mechanized tools into highly advanced systems
equipped with with semi-autonomous features.
As harvesting technology advances, so does the
complexity of operating these machines. Modern
harvesters, while capable of performing many au-
tonomous tasks, still require human oversight, placing
greater demands on operators. Operating these ma-
chines involves managing challenging terrain, adapt-
ing to weather conditions, and processing large
amounts of real-time data tasks comparable to those
performed by fighter jet pilots (Burman and L
¨
ofgren,
2016). This level of complexity highlights the need
for effective training, where operators must develop
precise control and adaptive decision-making skills.
a
https://orcid.org/0009-0008-1103-0252
b
https://orcid.org/0000-0002-6435-4364
Traditionally, heavy equipment operators have
been trained on-site, which is costly and resource-
intensive. In response, many industries are turning
to simulators for cost-effective and controlled training
environments. With the rise of Virtual Reality (VR)
technology, simulators have become even more effec-
tive, offering immersive environments for training op-
erators of complex machinery (De Crescenzio et al.,
2011). In the forestry industry, where operators face
high physical and cognitive demands, VR solutions
are particularly valuable.
VR-based simulators provide several key advan-
tages for forestry training. They enable training ses-
sions without disrupting actual harvesting operations,
improving both time and cost efficiency. Physical fa-
tigue, particularly in the neck, arms, and shoulders,
is a common issue for operators, and VR simulations
can help alleviate such strain. Mental fatigue from
managing complex control interfaces and navigating
off-road environments also increases the risk of acci-
dents (Wei-Sheng Wang and Huang, 2024). VR sim-
ulators address these challenges by providing a safe,
controlled environment to enhance operator skills and
proficiency.
276
Ramesh, B. P., Backus, I. and de Amicis, R.
Design and Development of an Interactive and Intelligent Wood Harvester Machine Operator Simulator.
DOI: 10.5220/0013188000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 276-283
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

2 BACKGROUND AND RELATED
WORK
Early studies established the feasibility of using VR
for training forestry operators. (Lapointe and Robert,
2000) designed a VR system that simulated the con-
trol of a harvester’s manipulator arm and processing
head through a workstation and two-axis joysticks.
This system replicated the physical environment op-
erators encounter, demonstrating that VR could sig-
nificantly increase harvesting productivity while re-
ducing maintenance costs. Similarly, (Lopes et al.,
2018) found that participants with no prior experience
in forestry operations could quickly develop the nec-
essary skills using a Harvester Virtual Reality Simu-
lator (HVRS).
Over the years, simulator technologies have ad-
vanced, integrating increasingly sophisticated hard-
ware and software components. (Zheng et al., 2018)
developed a training system featuring a steering
wheel, pedals, a shifter, and control handles, with vi-
sual feedback rendered through Unity3D. This sys-
tem demonstrated the importance of creating realis-
tic driving interfaces to enhance operator immersion
and skill acquisition. Similarly, (Luecke, 2012) devel-
oped the GREENSPACE VR simulator to train com-
bine operators in precision farming. By incorporating
authentic operator controls, GREENSPACE offered a
realistic driving experience and promoted the adop-
tion of precision farming methods.
Innovative input technologies have also been ex-
plored to enhance user interaction with virtual train-
ing environments. (Nainggolan et al., 2020) evalu-
ated the Leap Motion Controller as an input device for
controlling virtual joysticks and levers. Their research
highlighted the potential for novel, gesture-based in-
put systems to improve user satisfaction and control
precision, pointing to future directions for immersive
training systems.
Because of the heavy dependency on physical
hardware like steering wheels, pedals, and joysticks
the costs and complexity of setting up training envi-
ronments increases, making it less accessible for in-
stitutions with limited resources and funds. These se-
tups also restrict flexibility, as new or updated train-
ing modules would require modifications to physical
setups, rather than being adaptable entirely through
software updates.
US companies like JohnDeere (Deere, 2024) and
CM Lab Simulations (Labs, 2024), Finnish compa-
nies Ponsse (Ponsse, 2024) and Mevea (Mevea, 2024)
have developed a virtual training platform for log-
ging harvesters with high immersion, good stability
and real-time interaction. However, these simulators
are likely to come with significant development and
maintenance costs. This can make it challenging for
smaller educational institutions or training centers to
adopt such advanced simulators.
Addressing these shortcomings could signifi-
cantly enhance the efficacy of VR training systems for
harvester and logging machinery by improving their
immersion, accessibility, and ability to accommodate
a range of learner needs.
The collective body of research and industry ef-
forts underscores the growing importance of VR tech-
nologies in forestry training. As these technologies
continue to evolve, they are poised to play a central
role in equipping operators with the skills required to
manage increasingly complex machinery. VR-based
simulators offer a cost-effective and accessible solu-
tion for initial training.
3 VIRTUAL REALITY AND DICE
FRAMEWORK
Traditional training methods often struggle to keep
pace with the evolving needs of industries such as
forestry, where technological advancements demand
more specialized skills. With VR systems becoming
more affordable, portable, and accessible sometimes
costing less than a typical smartphone the question
arises: when is it time to shift from traditional meth-
ods to next-generation VR solutions?
The DICE framework, proposed by Bailenson
(Bailenson and Lesher, 2024), provides valuable cri-
teria to determine when VR is the appropriate training
medium. DICE stands for: Dangerous, Impossible,
Counterproductive, and Expensive situations where
VR offers significant advantages over conventional
practices. A VR-based training simulator for forestry
harvester operators aligns well with the DICE frame-
work by addressing each of these dimensions:
Dangerous: Operating forestry harvesters in-
volves maneuvering heavy equipment across uneven
terrain and navigating dense forest environments,
which can pose risks, especially for novice operators.
Training in a virtual environment mitigates the risk
of accidents and injuries, offering users a safe space
to develop their skills without exposure to real-world
hazards. VR allows trainees to practice critical ma-
neuvers repeatedly until they achieve proficiency, re-
ducing the likelihood of mishaps during live opera-
tions.
Impossible: Simulating rare or extreme scenar-
ios in real life, such as operating in severe weather
conditions, handling equipment failures, or respond-
ing to falling trees, can be impractical for safety rea-
Design and Development of an Interactive and Intelligent Wood Harvester Machine Operator Simulator
277

sons. VR enables operators to experience and prepare
for these uncommon situations, equipping them with
the decision-making skills necessary to respond effec-
tively when such challenges arise in the field.
Counterproductive: Traditional on-site training
often requires taking expensive equipment out of ser-
vice, slowing down productivity, and diverting skilled
operators from their regular duties to mentor trainees.
Moreover, forestry operations are seasonal, with busy
periods leaving little room for in-depth training. VR
eliminates these disruptions by allowing operators to
train at any time without impacting ongoing opera-
tions. This ensures that essential training does not
interfere with crucial harvesting windows, helping to
maintain productivity throughout the year.
Expensive: On-site training involves consider-
able costs, including machinery operation, mainte-
nance, fuel, and the risk of equipment damage dur-
ing practice. VR simulators offer a cost-effective al-
ternative by reducing reliance on physical machinery.
Operators can practice as many times as needed with-
out incurring additional costs, minimizing the finan-
cial burden associated with real-world training.
VR enhances training with consistency and scala-
bility, allowing standardized modules to be replicated
across locations and schedules, ensuring uniform skill
development. This promotes safety and efficiency in
forestry operations.
Aligned with the DICE framework, VR simulators
provide immersive, repeatable, and risk-free training
scenarios, essential for mastering complex machinery.
Integrating VR into forestry training reduces costs,
minimizes disruptions, and prepares operators for the
challenges of modern forestry.
4 SIMULATOR DESIGN
4.1 Software Stack
The software stack for this project is built around
Unity 2022.3.23f1, which serves as the primary game
engine. Unity is selected for its versatility and ro-
bust tools for creating immersive 3D experiences. The
project makes use of Unity’s built-in physics engine to
simulate real-world interactions with high accuracy. It
also helps to enable realistic physical behavior and in-
teractions within the virtual environment. The built-in
3D rendering capabilities are used to guarantee op-
timal performance and visual quality which allows
complex models and environments to be rendered
smoothly. The project is developed using C#, which
is the preferred programming language in Unity for
its ability to handle object-oriented programming and
efficient manipulation of game objects. Visual Studio
2022 is selected as the Integrated Development Envi-
ronment (IDE). Git and GitHub Desktop are utilized
for version control and code management throughout
the development process. To support extended real-
ity (XR) functionality, the project integrates the Ocu-
lus XR Plugin along with Unity’s XR Plugin Man-
agement. These packages are critical for managing
and deploying the application to various XR plat-
forms, ensuring compatibility with devices like the
Meta Quest series, and providing users with a smooth
and immersive VR experience. Together, this suite
of technologies forms a cohesive and efficient frame-
work for the development, testing, and deployment of
the VR project.
4.2 Meta Quest
Unity supports development and deployment on the
Meta Quest (Quest, 2024), making it ideal for the sim-
ulator.
The Meta Quest 2 and 3s are more affordable
than other VR devices. For training environments,
especially in educational or industrial contexts, bud-
get constraints often necessitate selecting a solution
that balances performance with cost. Its affordability
made it an ideal choice for prototyping and validating
the system’s functionality.
Therefore, the simulator has been developed and
optimized for the Meta Quest 2 and 3s standalone VR
headset. With Six Degrees of Freedom (6DOF) the
headset provides full immersive experience to the user
in a virtual space. The headset also features built in
3D positional audio.
The Meta Quest controllers are used as the pri-
mary user input. The controllers are programmed
through scripting, allowing users to manipulate scene
objects within the virtual environment. During the de-
velopment phase, we used the the quest link cable to
connect the headset to the computer. This allowed us
to test and debug the changes made in the VR envi-
ronment instantly, making it easier to iterate quickly
without having to repeatedly build and deploy the ap-
plication to the headset.
The controllers are also made visible to the user
in the virtual environment using a prefab model. The
prefab for the Meta Quest controllers are sourced
from Meta Horizon. The controller models are avail-
able in .fbx format which makes it easy to import and
use in Unity.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
278
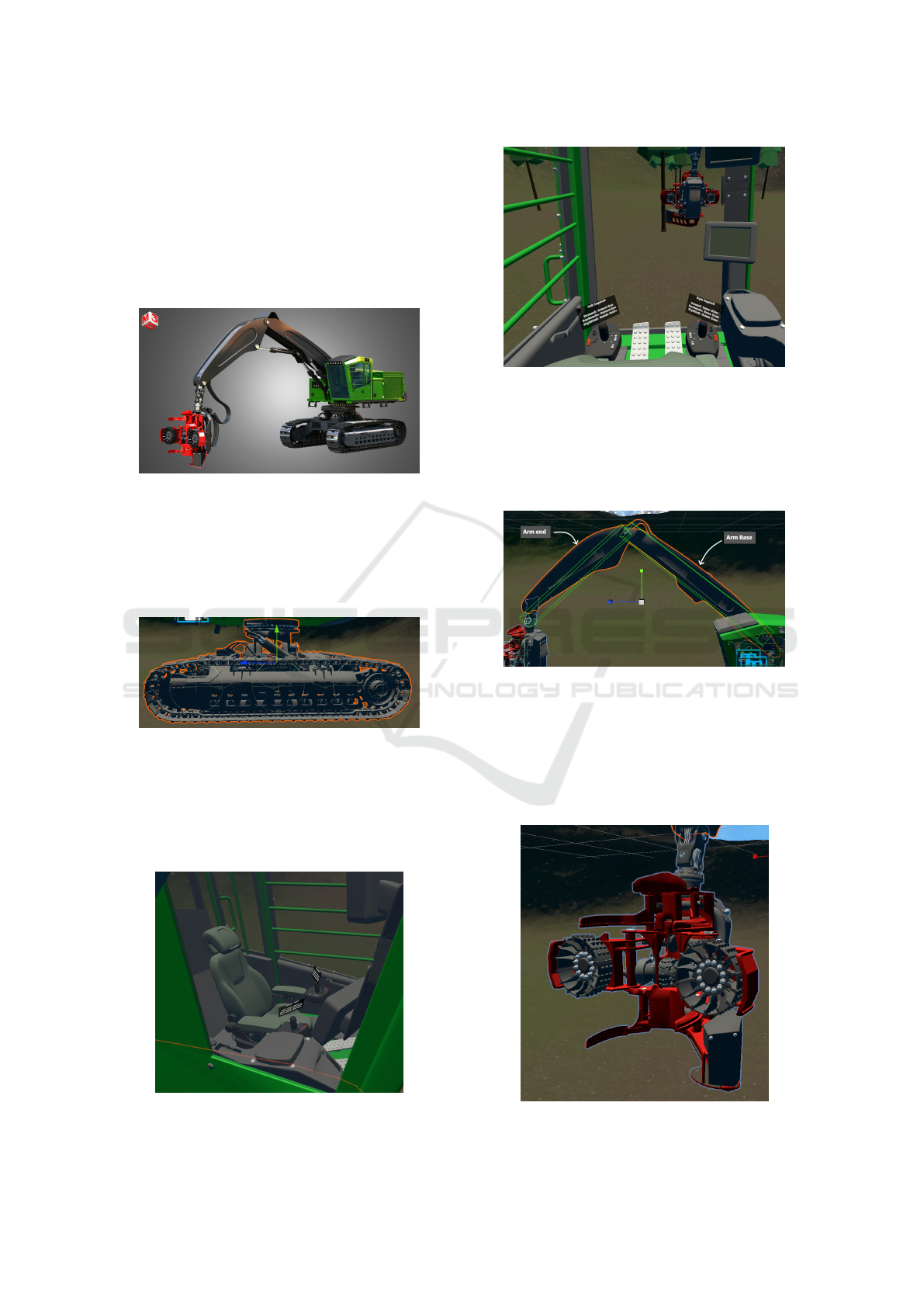
4.3 Harvester Model
The simulation utilizes the John Deere - 959MH
Tracked Harvester model integrated into the VR en-
vironment which has been sourced from (CGTrader,
) and developed by Markos 3D. The virtual harvester
(Figure 1) closely resembles the real one capturing its
complexities in detail.
Figure 1: Virtual John Deere Harvester model.
The 4 main components of the harvester are -
tracks (Figure 2), cabin (Figure 4), harvester arm
(Figure 5) and harvester head (Figure 6). The tracks
consist of three wheels - front, middle and rear along
with a crawler on both the right and left side.
Figure 2: Harvester track.
The operator’s cabin features components like the
seat, control panel, buttons, joysticks, pedals, moni-
tors, and windows (Figure 3 and 4). We removed the
front glass pane from the original model to improve
visibility, as it obstructed the view.
Figure 3: Operator Seat.
Figure 4: Inside the cabin.
The harvester end and the harvester base make up
the harvester arm (Figure 5), sometimes referred to as
the harvester boom. Retraction, extension, lowering,
and raising of the arm are all made possible by the
Unity scripts.
Figure 5: Harvester arm.
The harvester head (Figure 6) consists of inner and
outer claws to grasp trees. It also consists of inner and
outer wheel components which process the grasped
tree. Apart from this it also features a blade to cut
trees and an arm that connects the harvester head to
the boom.
Figure 6: Harvester head.
Design and Development of an Interactive and Intelligent Wood Harvester Machine Operator Simulator
279

4.4 Scenario Creation
The virtual scenario, as shown in Figure 7 is designed
in Unity platform. Starting with the ground, it was
created using the game object terrain. Various heights
were applied at different locations to replicate the
contours of mountain terrain. To provide a more nat-
ural look, we also applied grass and dirt textures to its
surface.
Figure 7: Harvester model and the virtual forest in Unity.
We modeled the trees in Unity with ProBuilder.
The tree prefab consists of a trunk and branches as
its child game objects. This modular design approach
treats each part, such as the trunk and branches, as
separate units or components. This allows flexibility
in creating a variety of tree types and adapting the
simulator to different use scenarios.
4.5 Simulator Design
The VR simulator, developed in Unity with C#, runs
as an Android APK on the standalone Meta Quest
headset. The Quest controllers enable intuitive inter-
action and precise control of the harvester within the
simulation.
Upon entering the VR simulator, users find them-
selves positioned inside the harvester cabin, seated in
the operator’s chair. For a better experience, the user
may also choose to sit on a physical chair while using
the simulator. The headset dynamically adjusts the
view as users move their heads. Movement within the
simulator is restricted to the cabin area, as all opera-
tional procedures must be conducted from the seated
position. Each button of the controller has a certain
action associated with it, for example, cutting, tilting,
processing, etc. The cabin also features virtual joy-
sticks on the front panel that can be manipulated us-
ing the controllers to perform specific functions. The
Meta Quest controllers and virtual joysticks, shown in
Figure 8, are labeled for easy function identification.
Figure 8: Labelled controls.
The virtual joystick once grabbed using the con-
trollers, switches its color to blue to give a visual cue,
indicating that they have been grabbed. The harvester
operates within a training field where trees are strate-
gically placed, allowing users to practice various op-
erational techniques. Figure 9 provides a high level
overview of the system architecture.
Figure 9: System architecture.
The design of the system was guided by feedback
from subject matter experts in the forestry department
at Oregon State University, ensuring that it aligns with
industry requirements. The main goal of the system is
to create a tool that is portable, accessible, and cost-
effective, making advanced training solutions avail-
able to a wider range of users and settings.
4.6 Tasks
The training sessions are divided into different mod-
ules of increasing complexity ranging from simple
navigation of a harvester to cutting and processing
a tree. These modules are divided based on the
principle of task simplification and part-task training
(Wickens et al., 2021), wherein complex tasks are di-
vided into smaller parts and trained individually be-
fore being reintegrated. Each part is a simpler version
of a complex task. As the proficiency develops, the
difficulty of the task gradually increases.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
280

Module 1 - Driving the, Harvester (Naviga-
tion): The primary objective of this initial module is
to enable the user to navigate the harvester to a desig-
nated location. This is achieved by manipulating the
thumbsticks on the controllers. Specifically, pushing
the thumbstick on the left-hand controller forward or
backward moves the harvester in the corresponding
direction, while pushing the thumbstick on the right-
hand controller left or right allows for lateral move-
ment.
Module 2 - Harvester Head and Boom Move-
ments: In this module the user has to learn correctly
how to control the movements of the harvester’s head
and arm. This involves manipulating virtual joysticks
and using specific controller buttons to achieve pre-
cise actions. To tilt the harvester head, the user has
to press the trigger button on the left-hand controller.
Pressing the grab buttons on either the right or left
controller allows the user to grip the respective vir-
tual joystick. Once the virtual joysticks are grabbed,
the movement of the harvester boom and harvester
head can be controlled. For lowering and raising
the harvester boom, the left virtual joystick needs to
be pushed forward and pulled backward respectively.
Similarly, to retract and extend the harvester boom,
the user needs to operate the right virtual joystick.
Pulling the joystick backward retracts the harvester
arm, whereas pushing it forward extends the arm. The
user can also adjust the harvester head by rotating it,
to align it properly with the tree. For rotation, push-
ing the right virtual joystick to the right rotates the
harvester head clockwise, and pushing it to the left
rotates it counterclockwise.
Module 3 - Processing Tree: The objective of
this module is to instruct users on the various actions
required for effectively processing trees with the har-
vester. Users should be able to grab, release, process,
and cut a tree. Once the harvester head is appropri-
ately positioned in front of a tree for a secure grip,
the user can press the B button on the right-hand con-
troller to close the harvester claw and grasp the tree.
To release the tree, the user must press the A button
on the right-hand controller. Pressing the trigger but-
ton on the right-hand controller will cut the tree. Ad-
ditionally, users learn to position the tree for further
processing. To process the tree upward or forward,
the X button on the left-hand controller is utilized,
while processing the tree downward or backward is
achieved by pressing the Y button on the left-hand
controller. Demonstrations of these interactions are
recorded and can be accessed through YouTube video
(XX, 2024b).
5 BLACK BOX TESTING
To thoroughly evaluate the functional capabilities of
the harvester simulator within the virtual reality (VR)
environment, we designed and conducted a series of
black-box tests. Black-box testing, which focuses on
the system’s outputs in response to a variety of user
inputs without examining the internal code, was cho-
sen to assess how effectively the simulator handles
real-world usage scenarios. A comprehensive suite
of 20 test cases was developed, covering a wide range
of interactions to validate the key functionalities of
the application and ensure it could handle both typi-
cal and edge-case user behaviors (XX, 2024a).
The primary objective of these tests was to eval-
uate the simulator’s ability to perform as intended
across multiple scenarios, as well as to assess its re-
silience when exposed to unexpected or erroneous in-
puts. These cases were designed not only to confirm
that the simulator functions correctly under normal
conditions but also to identify any potential flaws or
vulnerabilities that could emerge during atypical us-
age.
To ensure the pertinence, comprehensiveness, and
ethical soundness of our testing methodology, the en-
tire process underwent a rigorous review by the Insti-
tutional Review Board (IRB) of our institution. The
IRB approval was a critical step, as it confirmed that
the study adhered to the highest ethical standards for
research involving human participants. This approval
also enabled us to engage with practitioners from the
AR/VR field, allowing us to gather meaningful feed-
back and insights from experts actively involved in the
development, application, and optimization of immer-
sive training systems.
By combining comprehensive functional testing
with ethical oversight, we ensured that the simulator
not only meets technical requirements but also aligns
with best practices for responsible research. This ap-
proach allowed us to validate the simulator’s readi-
ness for deployment while gathering valuable input
from practitioners, further informing the iterative de-
velopment and refinement of the system.
5.1 Participants and Methods
The testing group consisted of 8 Computer Science
students, evenly split between 4 males and 4 females
at both graduate and undergraduate levels. The partic-
ipants’ ages ranged from 20 to 26 years, with a mean
age of 22.0 years and a standard deviation (STD) of
2.24 years. All participants had prior experience us-
ing VR headsets but were unfamiliar with the internal
workings of the harvester simulator. This ensured that
Design and Development of an Interactive and Intelligent Wood Harvester Machine Operator Simulator
281

their interactions with the system were unbiased, fo-
cusing purely on functionality from an end-user per-
spective.
The decision to involve computer science students
as participants in this process supported the verifica-
tion of the system. These participants, with their fa-
miliarity with VR systems, were well-positioned to
identify technical issues, assess interaction mecha-
nisms, and provide actionable feedback on the sys-
tem’s functional aspects without requiring extensive
onboarding. This approach allowed us to efficiently
validate the system’s design and development during
the early stages.
The test setup was designed to simulate realistic
conditions under which the simulator might be used.
As shown in Figure 10, participants were seated in
a physical chair to mimic the posture they would as-
sume during an actual training scenario.
Figure 10: A participant trying out the harvester simulator
on standalone VR headset.
The participants were given verbal instructions to
perform specific tasks within the simulator. Since
most participants were familiar with the naming con-
ventions for buttons and triggers on the VR con-
trollers, commands such as “Cut the tree using the
trigger button on the right-hand controller” were eas-
ily understood. However, additional guidance was
sometimes needed to help students identify the less
commonly used buttons, such as the grab and trigger
controls. More familiar buttons, such as X, Y, A, B,
and the thumbsticks, were easily identified by partic-
ipants without further assistance.
Each testing session lasted approximately 10 to 15
minutes. We conducted black-box testing on both a
standalone version of the simulator and a PC-tethered
version. Four students (2 male, 2 female) tested the
standalone version, while another four students (2
male, 2 female) tested the PC-tethered version. This
dual approach allowed us to evaluate the simulator’s
performance under different configurations, assessing
how it functioned independently on the VR headset
and how it performed when connected to a PC. We
specifically looked for differences in responsiveness,
graphical quality, and overall user interaction between
the two setups.
In the standalone configuration, students were
solely responsible for confirming whether the sim-
ulator behaved as expected based on their interac-
tions. For the PC-tethered version, the instructor
monitored and verified the simulator’s real-time be-
havior through Unity’s game view. This observation
ensured the simulator met the desired functional re-
quirements on both platforms.
5.2 Result
The black-box testing revealed that the harvester sim-
ulator responded correctly to most user inputs. How-
ever, 2 out of the 8 participants encountered issues
while understanding the exact operation of pushing
the left virtual joystick forward or backward, indicat-
ing a potential intuitivity issue. They also reported
that the pushing of the virtual joystick required more
effort, indicating a potential input sensitivity issue.
Most participants reported that the interaction felt in-
tuitive, though feedback suggested the need for more
visual feedback for familiarizing with the controls.
Students quickly became familiar with the basic
harvester operations. The instructor’s verbal instruc-
tions helped the participants understand how the con-
trollers worked. By the end of the session, most stu-
dents were capable of performing the complex task of
processing a tree without any guidance.
The harvester simulator substantially satisfies user
expectations with its intuitive control responses, ac-
cording to the findings of the black-box testing. How-
ever, the identified sensitivity issues suggest a need
for calibration of the input mechanisms to ensure
smooth interactions. Addressing these issues will
likely enhance user satisfaction and make the simu-
lator more effective for training purposes.
6 DISCUSSION AND
CONCLUSION
In this paper, we present the design and development
of a virtual reality (VR) forestry harvester simula-
tor, specifically optimized to run on the untethered
Meta Quest. The simulator offers users an immersive
platform to practice essential harvester operations, in-
cluding navigation, tree processing, and precise con-
trol of the harvester head and boom. By leveraging
the portability and accessibility of the Meta Quest, the
simulator eliminates the need for external hardware,
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
282

making it more flexible and accessible for training in
various settings.
As part of this study, we conducted a thorough
evaluation of the simulator’s functionality using 20
carefully crafted test cases. This rigorous black-box
testing ensured that the system performed as intended,
providing a reliable and accurate experience across
all core operations. To further validate the system,
we assessed its performance both as a standalone ap-
plication on the Meta Quest and when tethered to a
PC, comparing differences in responsiveness, graphi-
cal quality, and user interaction.
In future work, we will focus on evaluating the us-
ability of the system and validating the effectiveness
of the training simulator in formal educational set-
tings. This will involve collaboration with academic
institutions to integrate the simulator into forestry cur-
ricula, allowing us to measure its impact on students’
learning outcomes and practical skill development.
One current limitation lies in the restricted num-
ber of interactions, constrained by the limited buttons
on standard VR controllers. To address this, future
research will explore innovative interaction methods
that reduce reliance on physical controllers. Hand
gesture recognition, for example, could be used to
manipulate the virtual model’s control panel, offering
a more natural and intuitive way for users to interact
with the system
ACKNOWLEDGEMENT
This publication was prepared by Oregon State Uni-
versity using Federal funds under award #07-79-
07914 from the Economic Development Administra-
tion, U.S. Department of Commerce. The statements,
findings, conclusions, and recommendations are those
of the authors and do not necessarily reflect the views
of the Economic Development Administration or the
U.S. Department of Commerce.
SUPPLEMENTAL MATERIALS
Supplemental materials are available at https://bit.ly/
2025-GRAPP
REFERENCES
Bailenson, J. and Lesher, M. (2024). Virtual Reality and Its
Opportunities and Risks. OECD Publishing.
Burman, L. and L
¨
ofgren, B. (2016). Human-machine inter-
action improvements of forest machines. skogforsk–
the forestry research institute of sweden.
CGTrader. 959mh tracked harvester. https://www.
cgtrader.com/3d-models/vehicle/industrial-vehicle/
959mh-tracked-harvester.
De Crescenzio, F., Fantini, M., Persiani, F., Di Stefano, L.,
Azzari, P., and Salti, S. (2011). Augmented reality for
aircraft maintenance training and operations support.
IEEE Comput. Graph. Appl., 31(1):96–101.
Deere, J. (2024). Our company and purpose.
https://www.deere.com/en/.
Labs, C. (2024). Cm labs official website. https://www.cm-
labs.com/en/.
Lapointe, J.-F. and Robert, J.-M. (2000). Using vr for ef-
ficient training of forestry machine operators. Educa-
tion and Information Technologies, 5:237–250.
Lippe, R. S., Schweinle, J., Cui, S., Gurbuzer, Y., Kata-
jam
¨
aki, W., Villarreal-Fuentes, M., and Walter, S.
Contribution of the forest sector to total employment
in national economies: estimating the number of peo-
ple employed in the forest sector. Food and Agricul-
tural Organization of the United Nations.
Lopes, E. d. S., Pagnussat, M. B., and Cabral, O. d. J.
(2018). Effect of age and education level on operator’s
perfomance with harvester virtual reality simulator.
Luecke, G. R. (2012). Greenspace: Virtual reality interface
for combine operator training. Presence, 21(3):245–
253.
Mevea (2024). Mevea official website. https://mevea.com/.
Nainggolan, F., Siregar, B., and Fahmi, F. (2020). User
experience in excavator simulator using leap motion
controller in virtual reality environment. In Journal
of Physics: Conference Series, volume 1566, page
012093. IOP Publishing.
Ponsse (2024). Ponsse official website.
https://www.ponsse.com/#/.
Quest, M. (2024). Getting started with quest 2 and
quest 3. https://www.meta.com/help/quest/articles/
getting-started/.
Wei-Sheng Wang, Chia-Ju Lin, H.-Y. L. T.-T. W. and
Huang, Y.-M. (2024). Feedback mechanism in immer-
sive virtual reality influences physical hands-on task
performance and cognitive load. International Jour-
nal of Human–Computer Interaction, 40(15):4103–
4115.
Wickens, C. D., Helton, W. S., Hollands, J. G., and Ban-
bury, S. (2021). Engineering psychology and human
performance. Routledge.
XX, X. (2024a). Harvester functionlity tests.
https://bit.ly/functionlitytests.
XX, X. (2024b). Harvester interactions demo. https://bit.ly/
2025-GRAPP.
Zheng, Y., Cheng, B., Huang, Q., and Liu, J. (2018). Re-
search on virtual driving system of a forestry log-
ging harvester. Wireless Personal Communications,
102:667–682.
Design and Development of an Interactive and Intelligent Wood Harvester Machine Operator Simulator
283
