An Assessment of Shadow Generation by GAN with Depth Images on
Non-Planar Backgrounds
Kaito Toyama and Maki Sugimoto
Graduate School of Open Environmental Science, Keio University,
3-14-1 Hiyoshi Kohoku-ku Yokohama, Kanagawa, Japan
{kaito.t-0504, maki.sugimoto}@keio.jp
Keywords:
Mixed Reality, Shadow Generation, Virtual Object.
Abstract:
We propose the use of a Generative Adversarial Network (GAN) with depth images to generate shadows for
virtual objects in mixed reality environments. This approach improves the accuracy of shadow generation
process by aligning shadows with non-planar geometries. While traditional methods require detailed lighting
and geometry data, recent research has emerged that generates shadows by learning from the image itself, even
when such conditions are not fully known. However, these studies are limited to projecting shadows only onto
the ground: a planar geometry. Our dataset used for training the GAN, includes depth images allows natural
shadow generation in complex environments.
1 INTRODUCTION
Shadow generation for virtual objects in Mixed Re-
ality involves synthesizing shadows that align with
real-world light sources and geometry when combin-
ing virtual objects with real-world images (Schrater
and Kersten, 2000). Shadows are crucial for depth
perception , which enhances the realism of virtual ex-
periences (Hoffman et al., 1998; Chrysanthakopoulou
and Moustakas, 2024).
Typically, shadow generation algorithms require
information about real-world lighting, geometry, and
the relative position and shape of virtual objects.
However, obtaining this information is often chal-
lenging due to factors like occluded light sources and
complex geometries.
To address this, machine learning approaches have
been proposed. Liu et al. developed ARShadowGAN
(Liu et al., 2020), a method that uses a Generative
Adversarial Network (GAN) to generate virtual shad-
ows that resemble real-world shadows by learning
from the real-world objects and their shadows. This
method successfully generates realistic shadows us-
ing only two inputs: a composite image without shad-
ows and a mask of the virtual object. Additionally, Qi
et al. introduced HAU-Net and IF-Net to account for
lighting conditions and shadow shape, improving the
naturalness of generated shadows (Meng et al., 2023).
However, these methods are limited by their as-
sumption that shadows are projected onto a flat sur-
Input Images Output Image
Figure 1: Left figures indicate the input images. Each im-
age includes a shadowless virtual object with depth images.
Right images indicate generated shadows by the virtual ob-
jects on non-planar backgrounds.
face, making them less effective for complex geome-
tries. In this study, we utilize depth images to generate
natural shadows onto non-planar geometries. Depth
images provide information about the distance be-
tween a camera and the target geometory, which can
be considered as a key of shadow generation onto
non-planar geometries. By incorporating depth im-
ages as an extension of the existing GAN framework,
this paper investigates whether shadows considering
depth information can be generated onto non-planar
geometries.
Toyama, K. and Sugimoto, M.
An Assessment of Shadow Generation by GAN with Depth Images on Non-Planar Backgrounds.
DOI: 10.5220/0013188200003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
135-142
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
135
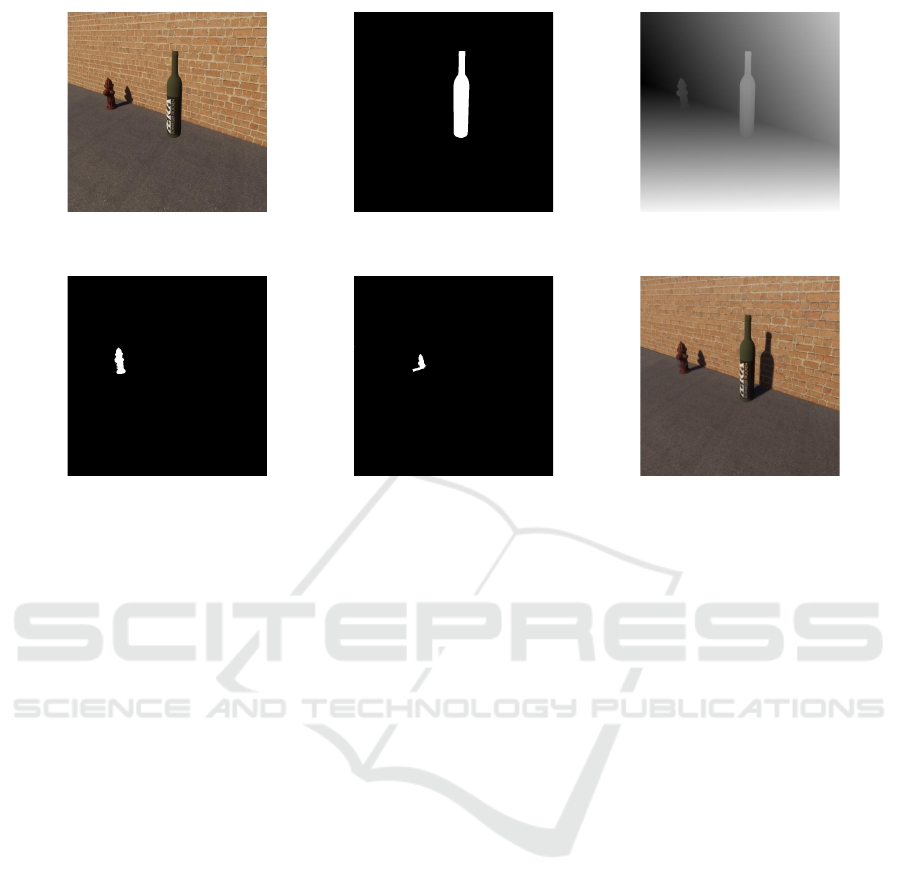
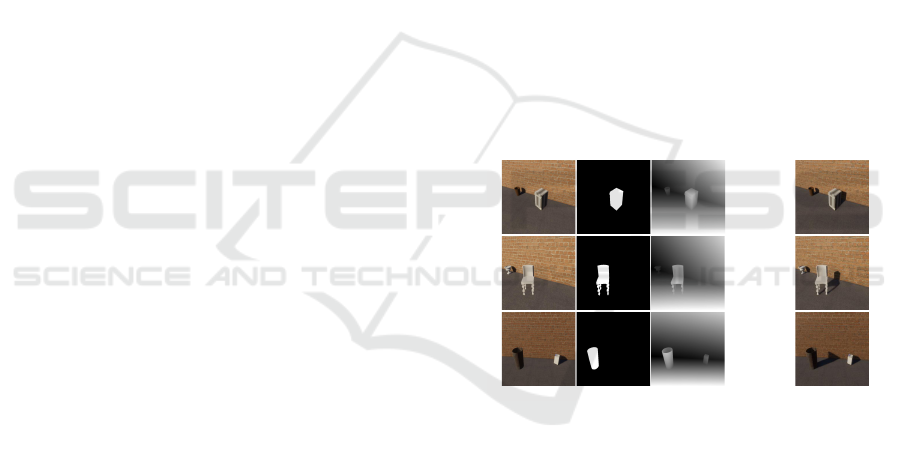
(a) No Shadow (b) Virtual Object Mask (c) Depth
(d) Real Object Mask (e) Real Shadow Mask (f) Ground Truth
Figure 2: The structure of the dataset. It consists of (a): No Shadow image, (b): Virtual Object Mask, (c): Depth image, (d):
Real Object Mask, (e): Real Shadow Mask and (f): Ground Truth image.
2 RELATED WORK
Shadow generation for virtual objects in MR environ-
ments can be achieved using algorithms when lighting
conditions and real-world geometry are known. How-
ever, when these conditions are not fully available,
shadow generation becomes challenging. To address
this issue, machine learning-based methods have been
developed.
Liu et al. proposed a method that integrates an At-
tention Block and a Shadow Generator Block into a
GAN. This approach takes a real-world image with a
synthesized virtual object and its corresponding mask
as input. The Attention Block estimates the positions
of real-world objects and their shadows, while the
Shadow Generator Block uses this information along
with the input images to generate shadows for the vir-
tual object. The generated shadow is then combined
with the real-world image to create a composite im-
age, which is fed into the Discriminator. Both the
Attention Block and Shadow Generator Block utilize
U-Net (Ronneberger et al., 2015) for enhanced seg-
mentation accuracy.
Meng et al. addressed the issue of unrealistic
shadows in complex lighting environments by em-
ploying HAU-Net and IFNet. HAU-Net captures
the interactions between foreground objects and the
background in both spatial and channel dimensions,
predicting realistic shadow shapes while considering
background lighting conditions. IFNet uses Exposure
Fusion to generate and merge multiple exposure im-
ages, which helps enhance the realism of shadows un-
der varying lighting conditions. This process adapts
to changes in background lighting, adjusting shadow
intensity and shape, resulting in more natural and re-
alistic shadows in the final composite image.
Sheng et al. introduced PixHt-Lab (Sheng et al.,
2023), a system that leverages a pixel height-based
representation to generate realistic lighting effects for
image compositing, such as soft shadows and reflec-
tions. Unlike methods that assume shadows are pro-
jected onto a ground plane, PixHt-Lab maps the 2.5D
pixel height representation to a 3D space, enabling
the reconstruction of both foreground and background
geometries. This approach significantly enhances
soft shadow quality on general shadow receivers like
walls and curved surfaces by incorporating 3D-aware
buffer channels. Their neural renderer, SSG++, uti-
lizes these buffer channels to guide soft shadow gen-
eration, addressing limitations in shadow realism and
providing more control over lighting effects. While
PixHt-Lab focuses on 2D image compositing, its use
of geometry-aware data structures to guide lighting
effects aligns closely with our approach to generat-
ing shadows for virtual objects on non-planar back-
grounds.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
136

To further improve the realism and quality of
generated images, incorporating depth images into
the generation process has proven effective. Depth
images provide essential information about the dis-
tance from each pixel to the object surface, offer-
ing valuable insights into the shape of objects in
RGB images. Qi et al. proposed a method that
integrates depth images into the image generation
process, significantly enhancing the naturalness and
overall quality of the generated images. Their ap-
proach combines semantic labels with depth maps
using a multi-conditional semantic image genera-
tion method. The quality improvement is achieved
through the Multi-scale Feature Extraction and Infor-
mation Fusion Module (MEIF) and the Multi-scale
Channel Attention Module (MCA). MEIF leverages
both depth information and semantic labels, using a
pyramid-shaped feature extraction mechanism to cap-
ture both global and local details from the depth im-
age, thus enhancing the feature maps derived from
depth information. MCA aligns features across differ-
ent scales by learning the correlation between feature
map channels at varying scales, ensuring consistency
and coherence in the generated images.
3 DATASET
We constructed a dataset which consists of No
shadow images, Real object masks, Real shadow
masks, Virtual object masks, Depth images and Truth
shadow images, to train the network model. The
image dataset used in this study Figure 2 was ren-
dered using Unity 2021.3.16f1, with objects within
the images sourced from ShapeNet (Chang et al.,
2015) and BlenderCity (Couturier, 2023). Depth im-
ages were obtained by calculating the depth from
the camera coordinates using the Z-buffer method.
To generate mask images for background and virtual
objects, we made non-background objects invisible
and applied the Z-buffer method, where only the ob-
ject portions had pixel values greater than 0. These
images were then binarized to create mask images.
The shadow mask images were generated by turning
off the Cast Shadow setting for the objects and then
taking the difference from the original image, fol-
lowed by binarization. We generated 3,600 images by
combining 20 background types, 3 viewpoints, and
60 virtual objects. The dataset will be published at
https://github.com/YaMaKaTsu5004/DepthShadowG
AN dataset].
4 METHODOLOGY
Figure 3 shows the architecture of the network model
used in this study. We extended the network model
of ARShadowGAN (Liu et al., 2020) to generate
shadows with depth information. Broadly, it con-
sists of three main components: the Attention Block,
the Shadow Generator Block, and the Discriminator
Block.
4.1 Attention Block
In the Attention Block, segmentation of real-world
objects and their shadows, which serve as input for
the Shadow Generator Block, is performed. The input
images consist of a composite image without shad-
ows, a mask image of the virtual object, and a real-
world depth image. The encoder uses ResNet (Resid-
ual Neural Network) (He et al., 2016), and U-Net
(Ronneberger et al., 2015) is employed to learn the
segmentation of real-world objects and their shadows.
4.2 Shadow Generator Block
The Shadow Generator Block is responsible for gen-
erating shadows for virtual objects. The input im-
ages consist of a composite image without shadows,
a mask image of the virtual object, a real-world depth
image, and the mask images of real-world objects
and their shadows generated by the Attention Block.
ResNet18 (He et al., 2016) is used as the encoder, and
U-Net (Ronneberger et al., 2015) is employed to gen-
erate a rough shadow. The generated shadow is then
refined through a Refinement process to make it more
natural.
4.3 Discriminator
The Discriminator distinguishes whether the gener-
ated virtual shadow is plausible, thereby advancing
the training of the generator. In this study, the Dis-
criminator model adopts the PatchGAN method (Isola
et al., 2017). PatchGAN consists of three consecu-
tive convolutional layers, followed by Batch Normal-
ize 2D and Leaky ReLU. Next, a convolution gener-
ates the final feature map, which is activated using a
sigmoid function. The final output of the Discrimina-
tor is the global average pooling of the activated final
feature map. In this study, the Discriminator takes as
input the concatenation of the virtual object shadow,
the virtual object mask, and the image containing the
shadow of the virtual object.
An Assessment of Shadow Generation by GAN with Depth Images on Non-Planar Backgrounds
137
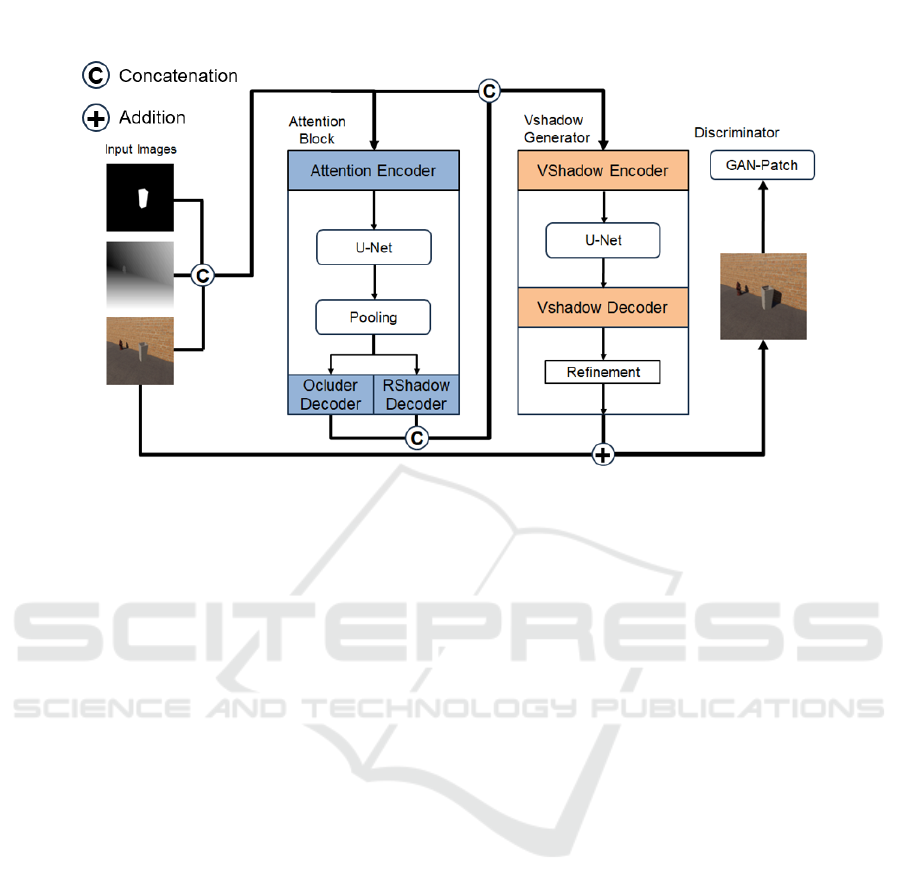
Figure 3: The architecture used in this study. The Attention Block focuses on real objects and their shadows, while the Virtual
Shadow Generator generates shadows for virtual objects. The input images consist of a Virtual Object Mask, a Depth image,
and No Shadow images. During training, the generated images are evaluated for authenticity by the Discriminator.
4.4 Loss Function
The loss function L
attn
used in the AttentionBlock is
defined using a squared loss as follows:
L
attn
=
A
obj
(x, m, d) − M
r
obj
2
2
+
A
shadow
(x, m, d) − M
r
shadow
2
2
(1)
where A
obj
is the predicted mask image of the
background object, and M
r
obj
is the ground truth mask
image of the background object. Similarly, A
shadow
is the predicted mask image of the background ob-
ject’s shadow, and M
r
shadow
is the ground truth mask
image of the background object’s shadow. The inputs
(x, m, d) represent the background image, the mask
image of the virtual object, and the depth image, re-
spectively.
The loss function L
gen
for the ShadowGenerator-
Block is defined as the weighted sum of three differ-
ent terms:
L
gen
= β
1
L
2
+ β
2
L
per
+ β
3
L
adv
(2)
Here, L
2
represents the squared loss, which calcu-
lates the squared error between the predicted and true
values. This is used to measure the error by treating
the real composite image and the generated composite
image as a regression problem. In the model of this
study, refinement is performed to adjust the coarse
shadows into more natural shadows. Therefore, the
loss function calculates the squared loss both before
and after the refinement, and their sum is defined as
L
2
. The output before refinement is:
¯y = x + G(x, m, A
obj
, A
shadow
) (3)
and the output after refinement is:
ˆy = x + R(G(x, m, A
obj
, A
shadow
)) (4)
The final L
2
loss is defined as follows:
L
2
=
∥
y − ¯y
∥
2
2
+
∥
y − ˆy
∥
2
2
(5)
L
per
is the perceptual loss (Johnson et al., 2016),
which emphasizes high-level feature and structural
similarity of the images. In this study, we use VGG16
(Simonyan and Zisserman, 2015) pre-trained on Im-
ageNet (Deng et al., 2009) to extract features. This
function is defined as follows:
L
per
= MSE(V
y
, V
¯y
) + MSE(V
y
, V
ˆy
) (6)
where MSE is the mean squared error, and V
y
rep-
resents the feature map extracted by the pre-trained
VGG16. This calculation compares the feature maps
at the intermediate layers to compute the loss.
The loss function for the Discriminator is defined
as follows:
L
adv
= log(D(x, m, y)) + log(1 − D(x, m, ˆy)) (7)
Here, D represents the probability that the image
is real. During GAN training, the Discriminator tries
to maximize L
a
dv, while the Generator tries to mini-
mize it.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
138
Ground
Truth
Ours
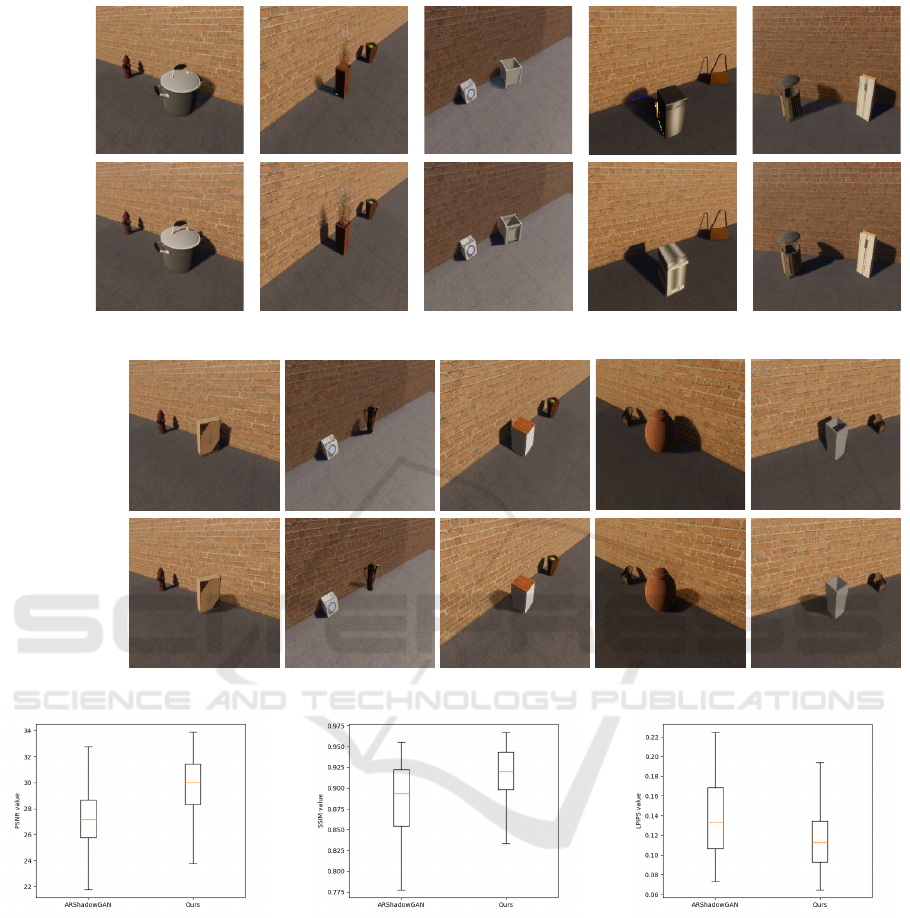
Figure 4: A comparison of our method and the ground truth.
Ours
ARShadow
GAN
(Liu et al., 2020)
Figure 5: A comparison of our method and ARShadowGAN.
Experiment PSNR Experiment SSIM Experiment LPIPS
Figure 6: Box plots summarizing the results for each case in the experiment.
5 EXPERIMENT
For the learning process, 3,600 images in the dataset
were split into training, validation, and test sets in a
ratio of 2880:360:360, respectively.
Figure 4 shows examples of the shadow genera-
tion results with the ground truth images. Also, Fig-
ure 5 shows comparative images with ARShadow-
GAN (Liu et al., 2020). The quantitative evaluation
using PSNR, SSIM, and LPIPS (Zhang et al., 2018)
for ARShadowGAN is displayed in box plots in Fig-
ure 6. The numerical comparison is presented in Table
1.
6 ABLATION STUDY
An ablation study was conducted to examine the im-
pact of each loss term by removing L
per
and L
adv
re-
spectively. Figure 7 shows The ablation study results.
An Assessment of Shadow Generation by GAN with Depth Images on Non-Planar Backgrounds
139
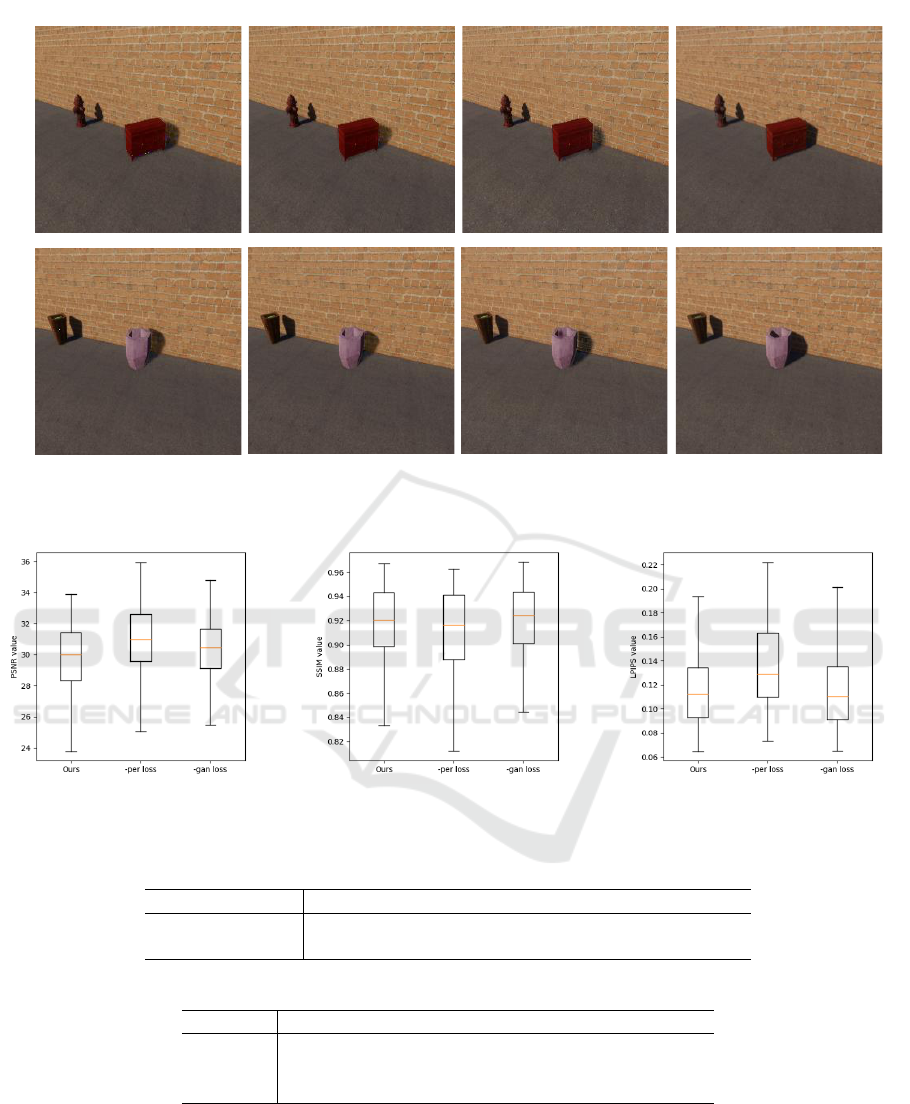
Ours -gan loss -per loss ground truth
Figure 7: A comparison between the regular results in the ablation study, the results with the perceptual loss removed, the
results with the GAN loss removed, and the ground truth images.
Ablation Study PSNR Ablation Study SSIM Ablation Study LPIPS
Figure 8: Box plots summarizing the results for each case in the ablation study.
Table 1: Experiment Average Rating.
PSNR [dB] SSIM LPIPS
ARShadowGAN 28.98 ± 2.29 0.9021 ± 0.0436 0.05544 ± 0.0210
Ours 29.57 ± 2.53 0.9176 ± 0.0295 0.1149 ± 0.0268
Table 2: Ablation Study Average Rating.
PSNR [dB] SSIM LPIPS
Ours 29.57 ± 2.53 0.9176 ± 0.0295 0.1149 ± 0.0268
-per loss 30.96 ± 2.34 0.9115 ± 0.0343 0.1358 ±0.0261
-gan loss 30.33 ± 2.08 0.9199 ±0.0286 0.1138 ± 0.0289
Figure 8 shows the comparison of PSNR, SSIM, and
LPIPS (Zhang et al., 2018) box plots. Table 2 shows
the average and standard deviation in each condition.
7 DISCUSSION
Figure 4 shows shadow generation results by our
method. It was observed that for the virtual object
of a chair, even the legs of the chair were projected
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
140

well as a realistic shadow, indicating that the method
were able to handle relatively detailed objects. Fig-
ure 5 shows a comparison between our method and
ARShadowGAN. The figure indicates our method is
capable to generate shadows with non-planar back-
grounds. However, we can also see points to be im-
proved. In the output images of our method, there
were issues such as the failure to generate shadows
for the convex parts of objects, excessive noise when
projecting shadows onto walls, and shadow overlap-
ping on concave parts of objects, which tended to
cause noise. Specifically, when projecting shadows
onto walls, noise was more prevalent for areas with
lower brightness. This is likely because the color of
the wall and the projected shadow were similar, lead-
ing to poor learning in the Perception Loss. Addition-
ally, the issue of noise in shadows within the object is
thought to be caused by the absence of the virtual ob-
ject’s image in the depth map. Since the mask image
of the virtual object was provided, the mask region in
the depth map became unnecessary information, pos-
sibly leading to poor learning in those regions.
For the qualitative assessment of the ablation
study, when comparing the images in Figure 7, it was
confirmed that without the perceptual loss, the shad-
ows around the object’s outline were not generated
compared to the results of our method, resulting in
unnatural images. Without the GAN loss, the shad-
ows projected onto the wall were shallower in angle
and smaller in size. For the quantitative assessment
of the results in Table 2 and Figure 8, the data did
not follow a normal distribution. It was confirmed by
the Shapiro-Wilk test. When performing the Mann-
Whitney U test between Ours and the -per loss condi-
tion, a significant difference was found in PSNR and
SSIM at p = 0.05. This suggests that the perceptual
loss term contributes to noise reduction and structural
similarity in the images. Furthermore, a significant
difference was found only in PSNR at p = 0.05 be-
tween Ours and -gan loss, indicating that the Discrim-
inator loss term likely contributes to noise reduction.
8 LIMITATION
One limitation of this study is that the dataset only
includes vertical walls, so accuracy may decrease de-
pending on the complexity of the backgrounds. Addi-
tionally, since the shape information beyond the out-
line of the virtual objects is not included, generating
shadows for complex virtual objects remains difficult.
To address this challenge, it will be necessary to in-
corporate shape information of virtual objects in the
learning process.
Moreover, the acquisition of depth images from
real-world environments is still imprecise, which
means that the model used in this study may not
achieve sufficient accuracy when applied in real-
world scenarios. As a potential solution for applying
this model in the real world, segmentation and label-
ing of the ground and walls could be used as an alter-
native input in place of depth images.
9 CONCLUSION
In this study, we constructed an MR dataset that in-
cludes depth images and generated shadows for vir-
tual objects on non-planar background geometries.
For the dataset construction, a new method for in-
corporating depth images as input was established.
By utilizing the depth images, this study proved that
it is possible to cast shadows of virtual objects onto
surfaces beyond flat background. The results of this
study suggest that generating shadows in considera-
tion of depth information can be applied for complex
background geometries.
REFERENCES
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P.,
Huang, Q., Li, Z., Savarese, S., Savva, M., Song,
S., Su, H., Xiao, J., Yi, L., and Yu, F. (2015).
Shapenet: An information-rich 3d model repository.
arXiv preprint arXiv:1512.03012.
Chrysanthakopoulou, A. and Moustakas, K. (2024). Real-
time shader-based shadow and occlusion rendering in
ar. In 2024 IEEE Conference on Virtual Reality and
3D User Interfaces Abstracts and Workshops (VRW),
pages 969–970.
Couturier, A. (2023). Scenecity: 3d city generator addon
for blender. https://www.cgchan.com/store/scenecity.
5.5.2024.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 248–255.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Hoffman, H., Hollander, A., Schroder, K., et al. (1998).
Physically touching and tasting virtual objects en-
hances the realism of virtual experiences. Virtual Re-
ality, 3:226–234.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 5967–
5976.
An Assessment of Shadow Generation by GAN with Depth Images on Non-Planar Backgrounds
141

Johnson, J., Alahi, A., and Fei-Fei, L. (2016). Perceptual
losses for real-time style transfer and super-resolution.
In Leibe, B., Matas, J., Sebe, N., and Welling, M.,
editors, Computer Vision – ECCV 2016, pages 694–
711, Cham. Springer International Publishing.
Liu, D., Long, C., Zhang, H., Yu, H., Dong, X., and Xiao, C.
(2020). Arshadowgan: Shadow generative adversarial
network for augmented reality in single light scenes.
In 2020 IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 8136–8145.
Meng, Q., Zhang, S., Li, Z., Wang, C., Zhang, W., and
Huang, Q. (2023). Automatic shadow generation via
exposure fusion. IEEE Transactions on Multimedia,
25:9044–9056.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In Navab, N., Hornegger, J., Wells, W. M.,
and Frangi, A. F., editors, Medical Image Computing
and Computer-Assisted Intervention – MICCAI 2015,
volume 9351 of Lecture Notes in Computer Science,
pages 234–241, Cham. Springer.
Schrater, P. and Kersten, D. (2000). How optimal depth cue
integration depends on the task. International Journal
of Computer Vision, 40:71–89.
Sheng, Y., Zhang, J., Philip, J., Hold-Geoffroy, Y., Sun, X.,
Zhang, H., Ling, L., and Benes, B. (2023). Pixht-lab:
Pixel height based light effect generation for image
compositing. In 2023 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
16643–16653.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In International Conference on Learning Representa-
tions.
Zhang, R., Isola, P., Efros, A. A., Shechtman, E., and Wang,
O. (2018). The unreasonable effectiveness of deep
features as a perceptual metric. In 2018 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 586–595.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
142
