
Household Task Planning with Multi-Objects State and Relationship
Using Large Language Models Based Preconditions Verification
Jin Aoyama
1,2
, Sudesna Chakraborty
1 a
, Takeshi Morita
1,2 b
,
Shusaku Egami
2
, Takanori Ugai
2,3
and Ken Fukuda
2
1
Aoyama Gakuin University, Kanagawa, Japan
2
National Institute of Advanced Industrial Science and Technology (AIST), Kotoku, Japan
3
Fujitsu Limited, Kanagawa, Japan
Keywords:
Task Planning, Large Language Model, Natural Language Processing, Embodied AI, Simulation.
Abstract:
We propose a novel approach to household task planning that leverages Large Language Models (LLMs) to
comprehend and consider environmental states. Unlike previous methods that depend primarily on common-
sense reasoning or visual inputs, our approach focuses on understanding object states and relationships within
the environment. To evaluate the capability, we developed a specialized dataset of household tasks that specif-
ically tests LLMs’ ability to reason about object states, identifiers, and relationships. Our method combines
simulator-derived environmental state information with an LLM-based planning to generate executable action
sequences. A key feature in our system is the LLM-driven verification mechanism that assesses whether envi-
ronmental preconditions are met before each action executes, automatically reformulating action steps when
prerequisites are not satisfied. Experimental results using GPT-4o demonstrate strong performance, achieving
89.4% success rate on state change tasks and 81.6% on placement tasks. Ablation studies confirm the pre-
condition check’s significant contribution to task success. This study establishes both a new methodology for
embodied AI reasoning and a benchmark for future work in environment-aware task planning.
1 INTRODUCTION
Advancement in the field of artificial intelligence (AI)
has led to growing demand for Embodied AI agents
capable of performing complex daily tasks. Embod-
ied AI (Duan et al., 2022) involves training agents
capable of interacting and performing complicated
tasks using various objects in real and virtual set-
tings. For example, tasks like “the robot performs
household tasks (e.g., cleaning, laundry) according
to human instructions” and “the robot finds partic-
ular objects in the environment and provides guid-
ance.” Within this field, there is an increasing inter-
est in leveraging Large Language Models (LLMs) to
enable agents to generate action plans for executing
tasks based on natural language instructions (Huang
et al., 2022; Ahn et al., 2022; Raman et al., 2024;
Lin et al., 2023; Yoneda et al., 2024). These studies
have demonstrated that LLMs possess crucial com-
a
https://orcid.org/0000-0002-3963-1761
b
https://orcid.org/0000-0001-8963-2562
mon sense knowledge essential for executing tasks in
daily life.
Here, we propose utilizing LLMs to interpret the
home environment by recognizing object states and
the relationships between objects. This information is
then used to generate suitable action plans for com-
pleting tasks based on the contextual understanding
of the environment.
Existing datasets (Puig et al., 2018; Shridhar et al.,
2020) used in previous studies consist of two types
of tasks. The first comprises tasks that can be ac-
complished using common sense knowledge of LLMs
without a comprehensive understanding of the envi-
ronmental setting. The second type is made up of task
difficult to accomplish without knowledge of objects
in the environment, but are achievable without de-
tailed knowledge of object states, identification num-
bers, or inter-object relationships.
For instance, to execute a task like “Turn on the
TV,” a general solution would involve generating an
action plan to approach the television and switch it on.
However, this task targets a single object and implic-
472
Aoyama, J., Chakraborty, S., Morita, T., Egami, S., Ugai, T. and Fukuda, K.
Household Task Planning with Multi-Objects State and Relationship Using Large Language Models Based Preconditions Verification.
DOI: 10.5220/0013188400003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 472-483
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

itly assumes that the object (the TV) is initially pow-
ered off. Consequently, LLMs can generate the action
plan based on the implicit knowledge that the power
is off without requiring object identification. Con-
versely, for a task like “Turn on all light switches,”
it would be challenging to generate an appropriate ac-
tion plan without knowing the number of lights in the
setting and their respective states (on or off). Current
task settings lack challenging scenarios that require a
thorough understanding of the home environment to
be resolved effectively.
The current study uses VirtualHome (VH) (Puig
et al., 2018), a multi-agent platform to simulate ac-
tivities in a household, to create a dataset of house-
hold tasks that are challenging to solve without an in-
depth understanding of the home environment. Two
tasks were prepared for this study: a state change
task aimed at bringing multiple objects into a specific
state, and a placement task aimed at moving multiple
objects to specific locations. Rather than processing
visual information, our study focuses on leveraging
LLMs in understanding the home environment to gen-
erate action plans for the agent.
Our proposed method generates appropriate ac-
tion plans to execute tasks step-by-step using LLMs
and home environment knowledge extracted from
VH. Additionally, the method uses LLMs to verify
whether the preconditions for executing the generated
actions are met. If not, action steps are regenerated
based on the environmental state extracted by LLMs.
Here, an action plan refers to a plan that sequences a
series of actions necessary to accomplish a task, and
an action step refers to each action that constitutes the
action plan.
To evaluate our method, we used a custom-made
dataset of household tasks to assess the success rates
of tasks performance. The employment of GPT-4o as
LLM showed a success rate of 89.4% for state change
tasks and 81.6% for placement tasks. Furthermore,
an ablation study demonstrated that the verification of
the preconditions and regenerating actions improved
task success rates.
The contributions of this study can be summarized
as:
1. The creation of a household task dataset that ne-
cessitates a comprehensive understanding of the
home environment for effective task execution.
2. The proposal of a method that employs LLMs
to recognize the home environment and generate
suitable action plans for task execution based on
their understanding of this environment.
The rest of this paper is organized as follows: Sec-
tion 2 outlines the task setting and the dataset used;
Section 3 discusses related works, including Task
Planning with LLM and HouseHold Task Dataset;
Section 4 describes the proposed methodology in de-
tail; Section 5 reports the evaluation experiments, in-
cluding the evaluation dataset, methods, indices, re-
sults, discussion, and limitations; and finally, Section
6 concludes the paper.
2 TASK DESIGN AND DATASET
This section describes the household tasks that re-
quires a comprehensive understanding of the home
environment and outlines the dataset necessary for
their evaluation. Home environment knowledge en-
compasses detailed information about objects within
the home environment, including their current states,
unique identification numbers, and the relationships
between objects.
The following requirements specify the dataset
parameters needed to evaluate these environment-
dependent household tasks:
• All tasks can only be completed by understanding
the home environment.
• All tasks require identifying the object’s identifi-
cation number that is necessary to clarify which
specific objects should be interacted with.
• The dataset should include tasks that cannot be
completed by assuming the object’s initial state
based on common sense. For instance, in a task
like “Turn on the light,” it is commonly assumed
that the light’s initial state is “OFF.” However,
the light may already be “ON.” Therefore, un-
derstanding the actual state of the home environ-
ment, rather than relying on common sense as-
sumptions, is crucial for task completion.
• The goal of each task should be uniquely defined.
For example, a household task like “Clean up”
is too abstract and difficult to evaluate automat-
ically, as there are multiple ways to achieve the
task’s goal. To address this, tasks need to be de-
signed with specific, well-defined goal conditions
to achieve consistency and accuracy in evaluation.
• The dataset should be constructed with the as-
sumption that environmental information is pro-
vided accurately, without requiring reliance on vi-
sual processing for its acquisition. This approach
aligns with the study’s focus on enabling LLMs
to recognize the environment and generate action
plans based on pre-existing, accurate data, rather
than examining the process of information collec-
tion.
The commonly used datasets in previous stud-
ies, do not meet the necessary criteria for evaluation.
Household Task Planning with Multi-Objects State and Relationship Using Large Language Models Based Preconditions Verification
473

Therefore, we set up two types of tasks that meet the
necessary criteria for evaluation. The first is a state
change task to bring multiple objects into a specific
state. The second is a placement task to move multi-
ple objects to specific locations.
3 RELATED WORKS
3.1 Task Planning with LLM
Recently, there has been growing interest in using
Large Language Models (LLMs) to enable agents to
generate action plans for task execution based on nat-
ural language instructions. The advantages of utiliz-
ing LLMs are as follows:
• Agents are increasingly able to interpret instruc-
tions at various levels of abstraction, allowing for
contextually accurate understanding.
• Agents can achieve high performance without
needing large amount of training data, enabling
more efficient learning with reduced data.
• Planning quality improves by utilizing broad com-
mon sense knowledge and advanced reasoning,
allowing agents to generate suitable action plans
for complex tasks.
The following studies (Huang et al., 2022; Ahn
et al., 2022; Raman et al., 2024; Lin et al., 2023;
Yoneda et al., 2024) demonstrated the possibility
of generating appropriate action plans from natural
language instructions to accomplish the task using
LLMs.
Huang et al. (Huang et al., 2022) used GPT-
3 (Brown et al., 2020) and BERT (Devlin et al., 2019)
to generate action sequences from abstract natural
language descriptions of task like “Make breakfast.”
Their method employed GPT-3 for planning and gen-
erating the next action step to accomplish the task,
then employed BERT to convert the action step into
the action command that can be executed in the simu-
lator. Subsequent iterations incorporated the previous
action step along with the task description for LLM-
based planning.
Raman et al. (Raman et al., 2024) advanced the
field of automated planning by enhancing Huang
et al.’s framework for generating corrective actions
in response to precondition errors. Their innova-
tive approach leverages simulator-based error feed-
back and few-shot reasoning to significantly improve
action generation quality. Through this method-
ology, embodied agents demonstrate markedly ex-
panded task execution capabilities compared to exist-
ing approaches (Huang et al., 2022; Ahn et al., 2022)
while maintaining semantic integrity and reducing the
need for repeated prompting.
The approach by Huang et al. leveraged the com-
monsense knowledge of LLMs to perform household
tasks without incorporating the home environment
knowledge. In contrast, we propose an approach that
utilizes the home environment knowledge to generate
action plans. In addition, the approach by Reman et
al. generates corrective actions to resolve precondi-
tion errors by leveraging error feedback from the sim-
ulator. On the other hand, we propose an approach
that uses the home environment knowledge to predict
errors before executing the action.
A significant challenge in LLM-based planning
for home environments lies in developing robust
mechanisms for environmental state estimation. The
following studies (Lin et al., 2023; Yoneda et al.,
2024) address this challenge.
Lin et al. (Lin et al., 2023) present an approach
that leverages tabular environmental data for step-
by-step action generation. Their method processes
simulator-derived data tables containing critical envi-
ronmental information including object states, spatial
coordinates, and relational properties to produce de-
tailed, executable action sequences.
Yoneda et al. (Yoneda et al., 2024) propose a
framework in which LLMs are prompted to maintain
the estimate of the state, often unobservable, and track
its transition as new actions are taken. The framework
continuously estimates states by performing multi-
step inference based on the estimated states. It also
generates executable actions based on the estimated
state from natural language instructions.
Unlike Lin et al.’s approach using comprehensive
tabular environmental data, our method intention-
ally constrains environmental knowledge and presents
it to the LLM in natural language form. While
Yoneda et al. emphasize LLM-based environmental
state estimation, our approach instead relies on direct
simulator feedback to maintain current environmen-
tal knowledge, updating in real-time as conditions
change.
3.2 Household Task Dataset
The VH dataset (Puig et al., 2018), ALFRED (Shrid-
har et al., 2020), and HAZARD (Zhou et al., 2024)
are designed for research focused on generating ac-
tion plans from natural language instructions to per-
form household tasks.
The VH dataset is collected to train the robot to
perform household activities. It includes common
home activities (e.g., preparing coffee), multiple natu-
ral language descriptions of how each activity can be
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
474
carried out, and the corresponding action sequences
for the agent to execute based on each description.
In studies using the VH dataset, evaluations typically
rely on an index based on the Longest Common Sub-
sequence (LCS) between the correct and generated
action sequences. However, when a robot performs
household tasks, its actions should adapt to the situ-
ation, even when given the same instructions. Cur-
rently, no dataset or evaluation metric accounts for
this situational variability.
ALFRED is a benchmark designed to learn how
to map natural language instructions and egocentric
vision to action sequences for completing household
tasks. The ALFRED dataset contains language di-
rectives linked to expert demonstration episodes, with
each directive including a goal instruction and a set of
step-by-step instructions. These expert demonstration
can be replayed deterministically in the AI2-THOR
2.0 simulator (Kolve et al., 2017). The dataset in-
cludes seven tasks, ranging from simple placement
tasks (e.g., putting an apple on a table) to more com-
plex tasks with additional steps (e.g., putting a mi-
crowaved potato on a countertop). ALFRED eval-
uates performance using two metrics: Task Success
and Goal-Condition Success. Task Success is a bi-
nary measure (1 or 0) that indicates whether the ob-
ject positions and state changes at the end of the ac-
tion sequence match the task’s goal conditions. Goal-
Condition Success is the ratio of successfully com-
pleted goal conditions at the end of an episode to the
total conditions required to complete the task.
The commonly used these datasets in previous
studies, do not meet the necessary criteria for eval-
uation referred to Section 2.
First, the tasks in these datasets do not require
identifying specific objects by their unique identi-
fiers. Second, they do not include tasks that can-
not be solved by simply estimating the object’s initial
state using commonsense. Third, the VH dataset lacks
clearly defined task goals, making it difficult to eval-
uate the performance automatically. Lastly, the AL-
FRED dataset relies on visual data processing to ac-
quire environmental information, which is not aligned
with the focus of this study.
4 METHODS
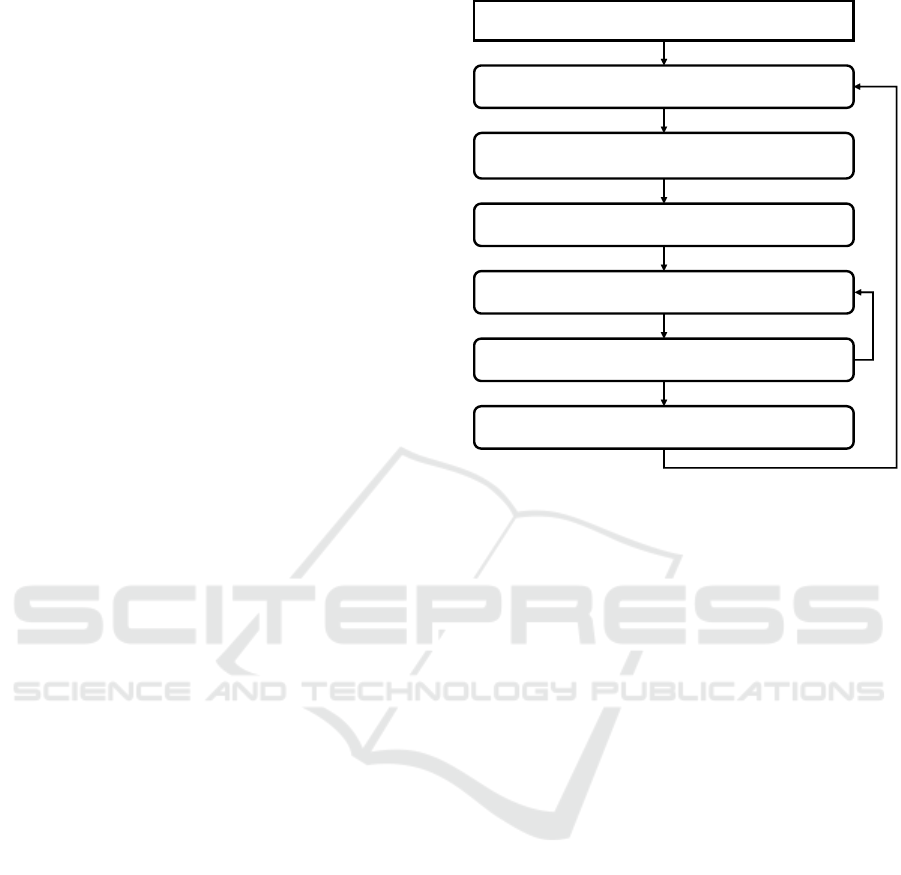
Here we outlines the proposed method, which con-
sists of six key components. Using LLMs and home
environment knowledge extracted from a simulator,
the method generates detailed, step-by-step action
plans to execute tasks. Additionally, LLMs are used
to verify whether the preconditions for each gener-
Task Description
Termination on Maximum Attempts
Extraction of Home Environment
Knowledge from a Simulator
Action Execution on a Simulator
Preconditions Check with an LLM
Action Step Generation with an LLM
Determination of Task Completion
with an LLM
Figure 1: Configuration of the Proposed Method.
ated action are met. If the preconditions are not satis-
fied, the method regenerates the action steps based on
the current environmental state, as determined by the
LLM. The structure of the proposed method is illus-
trated in Figure 1.
4.1 Extraction of Home Environment
Knowledge from a Simulator
In Figure 1“Extraction of Home Environment Knowl-
edge from a Simulator” gathers knowledge about the
home environment from a simulator and converts it
into natural language texts. This extracted knowledge
is limited to information about the agent and the target
objects specified in the task description.
The agent’s knowledge includes its relationship
with objects or rooms within the environment. Tar-
get object knowledge incorporates the states of those
objects and their relationship with other objects or
rooms in the environment. Additionally, when multi-
ple objects of the same type exist in the environment,
it is necessary to distinguish them. For this purpose,
object identification numbers are provided.
For example, in the task “Turn on all lights,” the
method describes the state and location of each light
in the environment.
Household Task Planning with Multi-Objects State and Relationship Using Large Language Models Based Preconditions Verification
475
4.2 Determination of Task Completion
with an LLM
In Figure 1, the component “Determination of Task
Completion with an LLM” uses an LLM, along with
the home environment knowledge extracted from the
simulator, to assess whether a task has been com-
pleted in the current status.
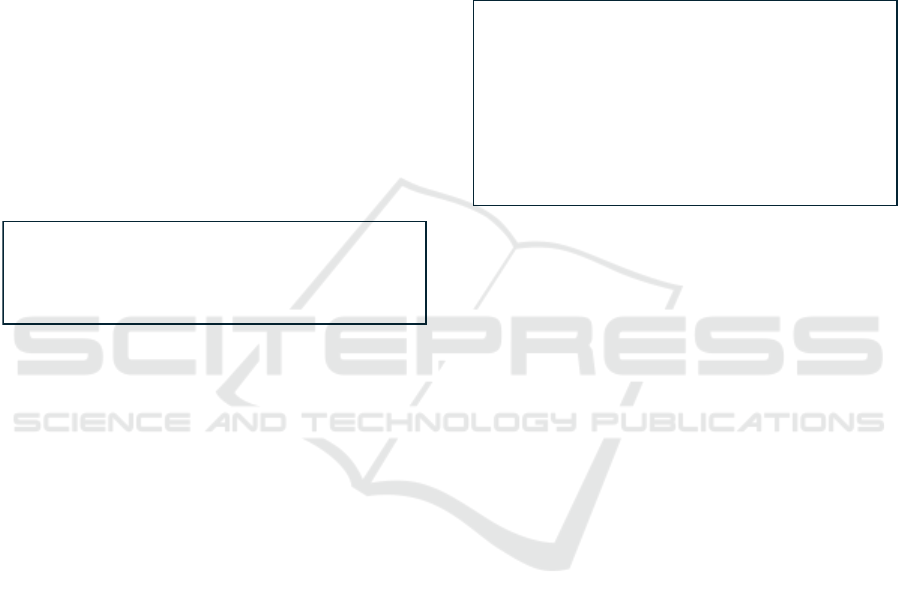
The prompt template that assesses whether a task
has been complete in the current status is shown in
Figure 2. The prompt begins with the home envi-
ronment knowledge, followed by specific instructions
regarding the task completion determination. In this
template, the red portions of the template are place-
holders to be filled with relevant information. If the
LLM outputs “End”, the task is complete, and the sys-
tem terminates. If it outputs “Continue,” the system
proceeds to the next step.
For example, in the task “Turn on all lights,” the
goal is for the LLM to output “End” once all lights in
the environment are in the “ON” state.
The current states in the home are as follows:
[ Home Environmental Knowledge ]
If the following task has already completed based on the current states,
output "End"; otherwise, output "Continue."
Task: [ Task Description ]
Figure 2: Prompt template used in “Determination of Task
Completion with an LLM”.
4.3 Termination on Maximum Attempts
In Figure 1, the “Termination on Maximum At-
tempts” component terminates the system when the
set maximum number of attempts is reached. The
number of attempts is added after passing this com-
ponent. This component is to prevent infinite loops in
the system.
4.4 Action Step Generation with an
LLM
In Figure 1, the “Action Step Generation with an
LLM” component utilizes an LLM, and the home en-
vironment knowledge, to develop a detailed, step-by-
step action plan for completing the task.
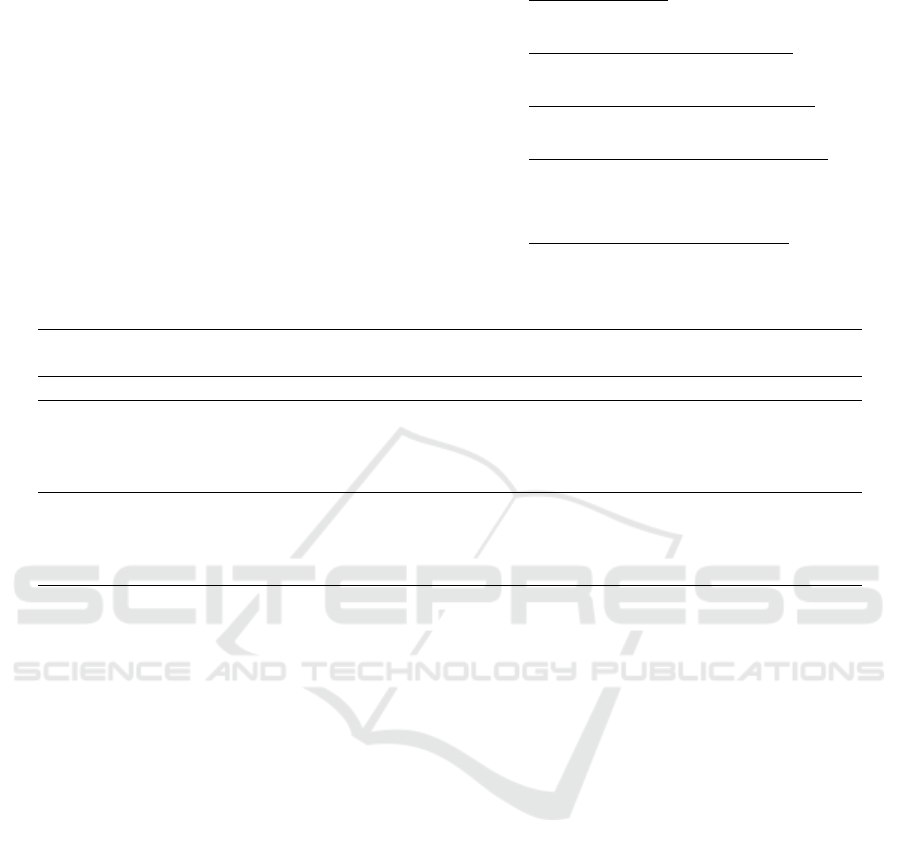
The prompt template that generates step-by-step
action plan for completing the task, shown in Fig-
ure 3, consists of the following elements:
• The role of the LLM.
• The actions that can be performed in the simulator
and the required output format.
• An example task and a corresponding action plan.
• Home environment knowledge described in natu-
ral language.
• The final instruction, which includes the task de-
scription and the action execution history.
These elements are provided to the LLM as a prompt
to generate the next action required to accomplish the
task.
For example, in the task “Turn on all lights,” the
LLM generates the next action needed to turn on any
lights that are still “OFF.”
You need to generate a next action step for completing a household task.
[ Allowed Actions and Output Format ]
[ Example Task and Action Plan ]
The current states in the home are as follows:
[ Home Environmental Knowledge ]
Generate an only next action step to complete the following task and
output only that.
Task: [ Task Description ]
Step1:
Figure 3: Prompt template used in “Action Step Generation
with an LLM”.
4.5 Preconditions Check with an LLM
In Figure 1, the“Precondition Check with an LLM” is
a novel feature introduced to ensure that the current
state of the environment satisfies the preconditions
necessary to execute the generated action step, using
an LLM. The sequence of steps for the “Precondition
Check with an LLM” is shown in the pseudo code of
Algorithm 1.
First, the system checks whether the preconditions
for action execution are met. This is done by pro-
viding a prompt that includes the home environment
knowledge and the required preconditions for the ac-
tion. The template for this prompt is shown in Fig-
ure 4.
If the LLM outputs “No,” indicating the precondi-
tions are not satisfied, it identifies the unmet precondi-
tions using another prompt, shown in Figure 5. At this
stage, the LLM is assumed to reference prior conver-
sation history. The system then regenerates the action
step, considering the previously generated action and
the unmet preconditions.
For instance, if the action “switch on” is generated
for a “light” that is already “ON,” the precondition
that the light must be in the “OFF” state is not satis-
fied. In this case, the LLM would respond with “No,”
indicating the unsatified precondition, and the action
step would be adjusted accordingly.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
476

Input : actionStep, preconds, currentStates
Output: executionActionStep
1 executionActionStep ← actionStep;
2 precondsCheckPrompt ← CreatePrecondsCheckPrompt(preconds, currentStates);
3 llmOut put ← Llm(precondsCheckPrompt);
4 if llmOut put = “No” then
5 extractionUnmetPrecondsPrompt ← CreateExtractionUnmetPrecondsPrompt(preconds);
6 unmetPreconds ← Llm(extractionUnmetPrecondsPrompt);
7 executionActionStep ← ActionStepGeneration(actionStep, unmetPreconds);
end
8 return executionActionStep
Algorithm 1: Preconditions Check with an LLM.
The current states in the home are as follows:
[ Home Environmental Knowledge ]
If the current states satisfies the preconditions, output "Yes"; otherwise,
output "No".
Preconditions:
[ Preconditions ]
Figure 4: Prompt template for precondition check.
Which the preconditions are not satisfied? Output only that.
Preconditions:
[ Preconditions ]
Figure 5: Prompt template for extraction unmet precondi-
tions.
4.6 Action Execution on a Simulator
In Figure 1, “Action Execution on a Simulator” uses
the action generated by “Action Step Generation with
an LLM” to simulate the action in the virtual envi-
ronment. After execution, the action is added to the
prompt as part of the action history.
Once the simulation is completed, the process be-
gins from “Extraction of Home Environment Knowl-
edge”. It continues until the LLM outputs “End” in
“Determination of Task Completion with an LLM”
stage or the maximum number of attempts is reached
in “Termination on Maximum Attempts” stage.
4.7 Implementation
The functional requirements for the simulator used to
implement the proposed method are as follows:
• The simulator must provide full access to envi-
ronmental data, including the states of objects, re-
lationships between objects, and interactions be-
tween the agent and objects.
• The simulator must support higher-level com-
mands, allowing the agent to move and interact
with objects by specifying the object and its iden-
tification number, instead of relying on detailed
actions like moving, rotating, or manipulating the
arm.
• The simulator must provide the preconditions re-
quired for executing actions.
In this study, the proposed method is implemented
using VirtualHome v2.3 (VH) (Puig et al., 2018) as
the simulator satisfying these requirements. VH is
unique in providing high-level commands for agent
interaction, unlike many other simulators that rely
on detailed, low-level actions. In addition, VH in-
cludes seven distinct scenes (houses), each with four
to five rooms, allowing for experiments across multi-
ple scenes with various rooms and objects.
4.7.1 VirtualHome Simulator
VH is a simulator designed to model activities in a
virtual household environment. The VH environment
is structured as a graph in JSON format, as shown
in part in Listing 1. The objects, rooms, and agents
in the environment are listed under the “nodes” key,
which contains semantic data such as identification
numbers, spatial coordinates, and object states. The
relationships between objects are defined under the
“edges” key, specifying the connections between ob-
jects through their identification numbers listed in the
“nodes” key.
In VH, agents are controlled based on action
scripts consisting of action steps. Each step includes
the action the agent performs, the object involved, and
the object’s ID (e.g., [WALK] ⟨livingroom⟩ (336)).
Actions have predefined preconditions that specify
the environmental conditions to be met before the ac-
tion can be executed. Detailed preconditions for each
action can be found in the VH documentation
1
and
GitHub repository
2
. For example, the preconditions
for the action “switch on” are that the object must be
“off” and the agent much be “close to the object.” VH
offers two methods for executing simulations: one
1
http://virtual-home.org/documentation/master/kb/
actions.html
2
https://github.com/xavierpuigf/virtualhome/tree/
master/virtualhome/simulation
Household Task Planning with Multi-Objects State and Relationship Using Large Language Models Based Preconditions Verification
477

Listing 1: environment graph.
{
"nodes":[
{
"id":1,
"category":"Characters",
"class_name":"character",
"position":[5.26,0.00,-7.86],
"properties":[],
"states":[]
},{
"id":336,
"category":"Rooms",
"class_name":"livingroom",
"position":[3.64, 0.00, -5.49],
"properties":[]
"states":[]
}
],
"edges":[
{
"from_id":1,
"to_id":336,
"relation_type":"INSIDE"
}
]
}
where object IDs are specified, and another where the
system automatically searches for objects without the
need for specific IDs.
4.7.2 Prompt Examples for VH
Examples of applying the prompt template that as-
sesses whether a task has been complete in the cur-
rent status shown in Figure 2 and the prompt template
that generates step-by-step action plan for completing
the task Figure 3 to the VH environment are shown in
Figures 6 and 7.
The current states in the home are as follows:
The lightswitch (71) is ON and is INSIDE the bathroom (11).
The lightswitch (173) is ON and is INSIDE the bedroom (73).
The lightswitch (261) is ON and is INSIDE the kitchen (205).
The lightswitch (427) is OFF and is INSIDE the livingroom (335).
You are INSIDE the bathroom (11).
If the following task has already completed based on the current states,
output "End"; otherwise, output "Continue."
Task: Turn on all lightswitches
Figure 6: Example prompt for VH used in “Determination
of Task Completion with an LLM”.
5 EXPERIMENTS
5.1 Overview of the Evaluation
Experiment
We evaluated our proposed method’s efficacy using
a dataset of environment-dependent household tasks,
You need to generate a next action step for completing a household task.
Allowed actions:
Walk, Grab, Switch on, Switch off, Open, Close, Put, Put in
Output Format:
[WALK] <Object> (ID)
[GRAB] <Object> (ID)
[SWITCHON] <Object> (ID)
[SWITCHOFF] <Object> (ID)
[OPEN] <Object> (ID)
[CLOSE] <Object> (ID)
[PUT] <Object1> (ID) <Object2> (ID)
[PUTIN] <Object1> (ID) <Object2> (ID)
Example Task: Turn on all tablelamps
Step1: [WALK] <tablelamp> (256)
Step2: [SWITCHON] <tablelamp> (256)
Step3: ...
The current states in the home are as follows:
The lightswitch (71) is ON and is INSIDE the bathroom (11).
The lightswitch (173) is ON and is INSIDE the bedroom (73).
The lightswitch (261) is ON and is INSIDE the kitchen (205).
The lightswitch (427) is OFF and is INSIDE the livingroom (335).
You are INSIDE the bathroom (11).
Generate an only next action step to complete the following task and
output only that.
Task: Turn on all lightswitches
Step1:
Figure 7: Example prompt for VH used in “Action Step
Generation with an LLM”.
measuring success rates for tasks requiring compre-
hension of the home environment. This experimental
evaluation assessed how well the method performed
when completing tasks that depend on understanding
environmental context and conditions.
5.2 Evaluation Dataset
To assess our method, we developed a new dataset
that satisfies the criteria outlined in Section 2.
5.2.1 State Change Task
These tasks require changing the states of objects
in the environment, such as “Turn on all lights” or
“Close all windows.” The target objects for these
tasks include items with states, such as home appli-
ances with switches and furniture with doors.
The task difficulty is divided into two categories:
simple tasks involving a single object, like “Turn on
the light,” and more complex tasks involving multiple
objects, such as “Turn on all lights.”
We focused on designing the latter, more com-
plex tasks. For each type of task description, we
created the dataset with multiple patterns of initial
object states. For instance, in the task “Turn on all
lights,” the initial state could vary, some lights might
be all “ON,” all “OFF,” or a mix of “ON” and “OFF.”
Since the agent’s behavior must adapt to different ini-
tial conditions, completing these tasks without using
detailed home environment knowledge to determine
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
478

which objects to interact with becomes more chal-
lenging.
5.2.2 Placement Task
These tasks involve placing objects in specific loca-
tions within the environment, such as “Put all apples
in the fridge.” The targeted objects for these tasks in-
clude those that the robot can grasp and those that can
receive other objects (receptacles).
Similar to state change tasks, placement tasks are
divided into two difficulty levels: simple tasks, which
involve placing a single object, like “Put an apple in
the fridge,” and more complex tasks, which involve
placing multiple objects like “Put all apples in the
fridge.”
Here too, we focused on designing the more com-
plex tasks. Some receptacles, like fridges, may have
doors that can be either “OPEN” or “CLOSED.” the
dataset includes two initial state patterns for the re-
ceptacles (“OPEN” or “CLOSED”). Before placing
an object, the agent must infer whether the recepta-
cle’s door needs to be opened using home environ-
ment knowledge. This design increases the difficulty,
as the task cannot be completed successfully without
such inference.
5.2.3 Dataset for VirtualHome
As described in Section 4.7, this study utilizes VH as
the simulator. Therefore, the dataset was designed to
be compatible with VH.
VH includes seven different scenes (houses), each
containing various rooms and different objects within
those spaces. Tasks were configured according to the
unique characteristics of each scene.
In VH, there are four types of object states: “ON,”
“OFF,” “Open,” and “CLOSED.” Considering object
variations in VH, we constructed a dataset for the state
change task by targeting seven types of objects with
a power supply (e.g., lightswitch, tablelamp). Addi-
tionally, for the placement task, we limited the place-
ment to movable objects classified as food or drink
items (e.g., banana, milk), and the placement loca-
tions were selected based on their suitability for plac-
ing such items (e.g., kitchentable, fridge). The dataset
was designed with twelve types of food and drink
items and eight designated placement locations.
Examples of the dataset are shown in Listing 2 and
3. The dataset consists the task description, the scene
in which the task takes place, the agent’s initial po-
sition, the initial states of the objects, the goal states
of the objects, and the action script necessary for the
agent to complete the task.
Listing 2: Example of State Change Task for VH.
{
”task”: ”Turn on all lightswitches”,
”scene”: 1,
”initial room”: ”kitchen”,
”initial states”: [
{”id”: 71, ”states”: [”ON”]},
{”id”: 173, ”states”: [”OFF”]},
{”id”: 261, ”states”: [”ON”]},
{”id”: 427, ”states”: [”OFF”]}
],
”goal states”: [
{”id”: 71, ”states”: [”ON”]},
{”id”: 173, ”states”: [”ON”]},
{”id”: 261, ”states”: [”ON”]},
{”id”: 427, ”states”: [”ON”]}
],
”action scripts”: [
”[WALK] <lightswitch> (173)”,
”[SWITCHON] <lightswitch> (173)”,
”[WALK] <lightswitch> (427)”,
”[SWITCHON] <lightswitch> (427)”
]
}
5.3 Data Split
The state change task dataset contains 464 examples,
while the placement task dataset has 154 examples.
We split each dataset roughly in a 2:1 ratio between
testing and sample. The sample data is used to gener-
ate action steps as examples.
For state change tasks, 312 examples were allo-
cated for testing, and 152 for training. For placement
tasks, 103 examples were used for testing, and 51 for
training.
Each dataset treats tasks as distinct, even when
they share the same task description, due to variations
in the initial states of objects and VH scenes. Al-
though the data split was random, we ensured that ex-
amples with the same task description were not shared
between the sample and test sets. As a result, the split
may slightly vary from the exact 2:1 ratio.
5.4 Evaluation Methods
To begin, the VH home environment is configured us-
ing the dataset’s scene and initial state. The proposed
method then generates action plans based on the task
description provided in the dataset.
We experiment with two approaches for prompt-
ing the LLM to generate action steps. The first
method, “Single Prompt,” provides multiple compo-
nents of the prompts described in Figure 3 to the LLM
at once. The second method, “Multi Prompts,” gives
the contents step-by-step. Furthermore, an ablation
study is conducted to evaluate the effectiveness of the
Household Task Planning with Multi-Objects State and Relationship Using Large Language Models Based Preconditions Verification
479

Listing 3: Example of Placement Task for VH.
{
”task”: ”Put all plums in the fridge”,
”scene”: 4,
”initial room”: ”bedroom”,
”initial states”: [
{”id”: 103, ”states”: [”CLOSED”]}
],
”goal states”: [
{
”from id”: 53,
”to id”: 103,
”relation type”: ”INSIDE”
},
{
”from id”: 54,
”to id”: 103,
”relation type”: ”INSIDE”
}
],
”action scripts”: [
”[WALK] <plum> (53)”,
”[GRAB] <plum> (53)”,
”[WALK] <fridge> (103)”,
”[OPEN] <fridge> (103)”,
”[PUTIN] <plum> (53) <fridge> (103)”,
”[WALK] <plum> (54)”,
”[GRAB] <plum> (54)”,
”[WALK] <fridge> (103)”,
”[PUTIN] <plum> (54) <fridge> (103)”,
”[CLOSE] <fridge> (103)”
]
}
“Preconditions Check with an LLM,” a critical feature
of the proposed method. Ablation studies for other
components were not performed, as removing them
would cause the system to fail.
For task evaluation, a similar task description from
the training dataset is selected as an example to help
the LLM generate action steps. The task example
chosen should closely resemble the input task descrip-
tion.
The maximum number of actions allowed to com-
plete a task is set at twice the length of the example
action plan from the training dataset. If the task isn’t
completed within this limit, the system terminates the
task, resulting in a failure.
If an action fails because its preconditions are not
met, the task is also terminated and marked as a fail-
ure.
As a baseline, we use the method described by
Huang et al. (Huang et al., 2022) that does not re-
ply onhome environment knowledge. This compari-
son highlights the importance of our dataset, which
requires an understanding of the home environment
for successful task completion. Since the base-
line method does not allow generating action scripts
with object IDs, simulation are run by automatically
searching for objects or rooms without specifying
IDs.
For this evaluation, we used two types of LLMs:
gpt-4o-mini (gpt-4o-mini-2024-07-18) and gpt-4o
(gpt-4o-2024-08-06). The baseline method uses only
gpt-4o. In both cases, the temperature was set to 0.0.
5.5 Evaluation Index
This study evaluates the proposed method using
task success rates, commonly employed in prior re-
search (Shridhar et al., 2020; Song et al., 2023). How-
ever, while previous evaluations did not consider ob-
ject identification numbers, our evaluation includes
verifying the correct matching of object IDs.
The task success rate is defined in Formula 1, as
the ratio of successful tasks to the total number of
tasks. A task is considered successful only if all goal
conditions are met; otherwise, the task is considered
as a failure.
We identify three types of failures. The first type
occurs when an action cannot be successfully exe-
cuted in the VH simulator. The second type of fail-
ure occurs when the maximum number of attempts is
reached without completing the task. The third type
happens when the task is incorrectly judged as com-
plete, even though not all goal conditions have been
satisfied. To better understand the causes of failure,
we define failure rates for each type, represented in
Formula 2, 3, and 4.
Each formula calculates the proportion of failures
caused by one of the failure types described above,
divided by the total number of tasks.
Additionally, we calculate the “AverageSteps”
(the average number of action steps) using Formula 6.
This metric helps assess the efficiency of the method
by measuring how many actions were executed during
task performance in the VH simulator.
5.6 Results
The results of comparing the proposed method with
baseline methods using the state change task dataset
are summarized in Table 1, while Table 2 shows the
results for the placement task dataset.
In these Tables 1 and 2, the “Baseline” under the
“Method” column refers to the method by Huang
et al., the “Single Prompt” refers to the approach
where a single prompt is provided to the LLM, and
the “Multi Prompts” approach splits the prompt into
multiple steps. “Single Prompt w/o PC” and “Multi
Prompt w/o PC” represent the ablation study, where
the “Preconditions Check with an LLM” was re-
moved from the proposed method.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
480
SuccessRate(SR) =
SumO f Successes
SumO f Tasks
(1)
ActionExecutionFailureRate(AEFR) =
SumO f ActionExecutionFailures
SumO f Tasks
(2)
FailureRateO f ReachingMaximunAttempts(FRRMA) =
SumO f ReachingMaximunAttempts
SumO f Tasks
(3)
ErroneousTerminateFailureRate(ET FR) =
SumO f ErroneousTerminateFailures
SumO f Tasks
(4)
FailureRate(FR) = AEFR + FRRMA + ET FR (5)
AverageSteps =
SumO f ActionStepsForAllTasks
SumO f Tasks.
(6)
Table 1: Results of State Change Task.
Method LLM SR
FR
Average Steps
AEFR FRRMA ETFR
Baseline (Huang et al., 2022) gpt-4o 0.032 0.0 0.535 0.433 10.481
Single Prompt
gpt-4o-mini 0.625 0.026 0.231 0.119 4.747
gpt-4o 0.788 0.016 0.173 0.022 4.381
Multi Prompts
gpt-4o-mini 0.750 0.045 0.183 0.022 4.917
gpt-4o 0.894 0.019 0.000 0.087 3.391
Single Prompt w/o PC
gpt-4o-mini 0.615 0.003 0.253 0.128 4.872
gpt-4o 0.760 0.016 0.189 0.035 4.449
Multi Prompts w/o PC
gpt-4o-mini 0.696 0.016 0.253 0.035 5.080
gpt-4o 0.872 0.010 0.016 0.103 3.478
The results demonstrate that the proposed method
achieves a higher success rate than the baseline.
This highlights the baseline method’s difficulty in
completing household tasks, as it generates action
scripts without incorporating environmental knowl-
edge. Moreover, comparing the proposed method’s
Single Prompt and Multi Prompts strategies, it was
found that dividing the prompt into multiple steps
generally led to higher success rates, except when gpt-
4o-mini was used for the placement task.
The ablation study results further indicate that ap-
plying “Preconditions Check with an LLM” gener-
ally improves the success rate. However, the opposite
effect was observed when using gpt-4o-mini for the
placement task.
A comparing between Tables 1 and 2 shows that
the success rate for the placement tasks is generally
lower than for the state change tasks. Additionally,
the notable difference in results between gpt-4o-mini
and gpt-4o for the placement task suggests that this
task demands a higher level of reasoning ability.
5.7 Discussion
The comparison between the state change task and
the placement task shows a lower success rate for
the placement task. This difference may be due to
the increased difficulty for the LLM to recognize and
reason about the spatial relationships between objects
compared to simply identifying their states. The sub-
stantial performance gap between gpt-4o-mini and
gpt-4o in the placement task further suggests that
placement tasks demand more advanced reasoning
abilities.
For the state change task, a high Failure Rate
Reaching Maximum Attempts (FRRMA) within the
overall Failure Rate (FR) indicates that most fail-
ures occur due to the system exceeding the maximum
number of attempts allowed for action steps. This is-
sue is likely tied to the process of “Action Step Gen-
eration with an LLM,” which relies on home environ-
ment knowledge. Often, failures stem from unneces-
sary interactions with objects that have already met
their goal state or objects that don’t require manipula-
tion, causing the system to take too many steps.
In the placement task, the high Erroneous Termi-
nate Failure Rate (ETFR) within the overall FR un-
derscores the importance of accurately assessing task
completion. The failures are primarily tied to er-
rors in the“Determination of Task Completion with an
LLM,” that judge task completion based on home en-
vironment knowledge and the task description. This
also explains why, in the placement task using gpt-4o-
mini, the Multi Prompts method did not outperform
Household Task Planning with Multi-Objects State and Relationship Using Large Language Models Based Preconditions Verification
481

Table 2: Results of Placement Task.
Method LLM SR
FR
Average Steps
AEFR FRRMA ETFR
Baseline (Huang et al., 2022) gpt-4o 0.000 0.010 0.573 0.417 15.398
Single Prompt
gpt-4o-mini 0.466 0.146 0.029 0.359 7.282
gpt-4o 0.738 0.117 0.029 0.117 8.078
Multi Prompts
gpt-4o-mini 0.408 0.117 0.029 0.447 6.447
gpt-4o 0.816 0.117 0.019 0.049 8.272
Single Prompt w/o PC
gpt-4o-mini 0.476 0.117 0.019 0.388 6.592
gpt-4o 0.680 0.165 0.029 0.126 7.320
Multi Prompts w/o PC
gpt-4o-mini 0.437 0.126 0.010 0.427 6.136
gpt-4o 0.796 0.117 0.029 0.058 7.767
the Single Prompt approach.
Regarding the ablation study on the state change
task, the success rate improved by applying “Precon-
ditions Check with an LLM,” primarily due to a re-
duction in FRRMA. For instance, during a task like
turning on a power source, if the power source is al-
ready “ON,” the system might generate an unneces-
sary action to turn it on again. The preconditions
check detects this and prevents redundant actions,
leading to more efficient task execution. However, it
should be noted that in the VH environment, actions
like turning on a power source that’s already on do
not result in execution errors, so the Action Execution
Failure Rate (AEFR) was not significantly affected.
For the placement task, the impact of the precon-
ditions check was more evident with gpt-4o, as it
helped reduce AEFR in the Single Prompt method.
However, no significant effect was observed for gpt-
4o-mini, since failures were mainly tied to earlier
stages in the “Action Step Generation with an LLM”
before the preconditions check could be applied.
5.8 Limitations
Our dataset has several limitations. Although it intro-
duces two types of tasks as an initial step towards a
new approach, it is constrained to specific task types,
as well as a limited range of object states and relation-
ships. To create a more versatile and robust system,
expanding the dataset to include a broader array of
tasks is inevitable.
Limitations also exist with the language models
(LLMs) used. This study relied on LLMs provided
by OpenAI, and their performance depends heavily on
the data they were trained on and the specific method-
ologies applied. Future research should experiment
with and analyze other LLMs to assess their applica-
bility to the proposed method.
Another limitation concerns how household envi-
ronment knowledge is acquired. This study assumes
that this knowledge of the household environment can
be accurately obtained from the simulator’s internal
data. However, for real-world applications, the ability
to recognize the environment using sensors or cam-
eras would become a fundamental requirement.
Finally, there are limitations related to action ex-
ecution. Currently, all actions are performed within
a simulated environment, but in real-world scenar-
ios, where an LLM’s outputs guide a robot’s actions,
incorrect outputs could lead to malfunctions, acci-
dents, or significant operational failures. This poses
added challenges for the safe application of LLMs in
robotics.
6 CONCLUSION
We proposed a novel approach to household task
planning that leverages LLMs to comprehend and
consider environmental states. Unlike previous meth-
ods that depend primarily on commonsense reason-
ing or visual inputs, our approach focused on under-
standing object states and relationships within the en-
vironment. To evaluate the capability, we developed
a specialized dataset of household tasks that specifi-
cally tests LLMs’ ability to reason about object states,
identifiers, and relationships.
To address these tasks, we proposed a method that
combines simulator-derived environmental state in-
formation with an LLM-based planning to generate
step-by-step action plans. Additionally, the method
utilizes LLMs to verify preconditions before execut-
ing actions; if preconditions are not met, the actions
are regenerated based on the updated environmental
state, using LLMs.
We evaluated our method using the custom dataset
of household tasks and measured task success rates.
Employment of GPT-4o as the LLM showed a suc-
cess rate of 89.4% for state change tasks and 81.6%
for placement tasks. An ablation study demonstrated
that verifying preconditions and regenerating actions
contributed to higher success rates. However, when
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
482

using GPT-4o-mini for placement tasks, challenges
emerged in recognizing and reasoning the home en-
vironment effectively.
Despite these results, the current dataset has lim-
itation, focusing on specific tasks and object states.
Future work should aim to expand the dataset to
cover a broader range of household tasks, including
tasks that require more complex object interactions
(e.g., washing dishes, vacuuming floors), different ob-
ject states (e.g., dirty or broken), and diverse envi-
ronments (e.g., different room layouts and multiple
floors). This expansion would enhance the generaliz-
ability of the proposed method and its applicability in
real-world scenarios.
While this study utilized OpenAI’s LLMs, ex-
ploring the performance of other LLMs, such as
those trained specifically for embodied tasks or those
with more comprehensive commonsense knowledge,
is crucial. This could help identify LLMs that are
better suited for household task planning and provide
insights into the influence of LLM architectures and
training data on task performance.
Currently, environmental knowledge is acquired
using a simulator. In the future, methods should be
developed to gather this information from real-world
sensors like cameras, enabling robots to visually per-
ceive their environment. This would improve adapt-
ability to dynamic situations and allow for practical
real-world applications.
Finally, ensuring the safety and reliability of gen-
erated action plans is crucial before intsalling robots
in real-world environments. Future work should ad-
dress on robust safety mechanisms, such as integrat-
ing safety constraints directly into LLM prompting,
using safety modules to evaluate actions, or testing
robot behavior in simulation before execution. These
precautions are critical in preventing operational fail-
ures or accidents in real-world scenarios.
ACKNOWLEDGEMENTS
This paper is based on results obtained from projects,
JPNP20006 and JPNP180013, commissioned by the
New Energy and Industrial Technology Development
Organization (NEDO). This work was partially sup-
ported by JSPS KAKENHI Grant Number 23K11221.
REFERENCES
Ahn, M. et al. (2022). Do As I Can, Not As I Say: Ground-
ing Language in Robotic Affordances. arXiv preprint
arXiv:2204.01691.
Brown, T. B. et al. (2020). Language Models are Few-Shot
Learners. CoRR, abs/2005.14165.
Devlin, J. et al. (2019). BERT: Pre-training of Deep Bidi-
rectional Transformers for Language Understanding.
In Proceedings of the 2019 Conference of the North
American Chapter of the Association for Computa-
tional Linguistics, pages 4171–4186.
Duan, J. et al. (2022). A Survey of Embodied AI: From
Simulators to Research Tasks. IEEE Transactions
on Emerging Topics in Computational Intelligence,
6(2):230–244.
Huang, W. et al. (2022). Language Models as Zero-Shot
Planners: Extracting Actionable Knowledge for Em-
bodied Agents. In International Conference on Ma-
chine Learning, pages 9118–9147. PMLR.
Kolve, E. et al. (2017). AI2-THOR: An Interactive 3D En-
vironment for Visual AI. arXiv.
Lin, B. Y. et al. (2023). On Grounded Planning for Em-
bodied Tasks with Language Models. In Proceedings
of the AAAI Conference on Artificial Intelligence, vol-
ume 37, pages 13192–13200.
Puig, X. et al. (2018). VirtualHome: Simulating Household
Activities via Programs. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Raman, S. S. et al. (2024). CAPE: Corrective Actions from
Precondition Errors using Large Language Models. In
2024 IEEE International Conference on Robotics and
Automation (ICRA), pages 14070–14077. IEEE.
Shridhar, M. et al. (2020). ALFRED: A Benchmark for In-
terpreting Grounded Instructions for Everyday Tasks.
In The IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Song, C. H. et al. (2023). LLM-Planner: Few-Shot
Grounded Planning for Embodied Agents with Large
Language Models. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
2998–3009.
Yoneda, T. et al. (2024). Statler: State-Maintaining Lan-
guage Models for Embodied Reasoning. In 2024
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 15083–15091. IEEE.
Zhou, Q. et al. (2024). HAZARD Challenge: Embodied
Decision Making in Dynamically Changing Environ-
ments. ArXiv, abs/2401.12975.
Household Task Planning with Multi-Objects State and Relationship Using Large Language Models Based Preconditions Verification
483
