
An Efficient Compilation-Based Approach to Explaining Random
Forests Through Decision Trees
Alnis Murtovi, Maximilian Schl
¨
uter
a
and Bernhard Steffen
b
TU Dortmund University, Germany
Keywords:
Random Forests, Decision Trees, Explanainable AI, Compilation-Based Explainability.
Abstract:
Tree-based ensemble methods like Random Forests often outperform deep learning models on tabular datasets
but suffer from a lack of interpretability due to their complex structures. Existing explainability techniques
either offer approximate explanations or face scalability issues with large models. In this paper, we introduce
a novel compilation-based approach that transforms Random Forests into single, semantically equivalent de-
cision trees through a recursive process enhanced with optimizations and heuristics. Our empirical evaluation
demonstrates that our approach is over an order of magnitude faster than current state-of-the-art compilation-
based methods while producing decision trees of comparable size.
1 INTRODUCTION
In recent years, machine learning has seen a sig-
nificant rise in popularity. Although deep learn-
ing methods are prevalent in areas such as nat-
ural language processing, computer vision, and
speech recognition, tree-based approaches, includ-
ing Random Forests (Breiman, 2001) and gradient
boosted trees (Friedman, 2001), frequently surpass
deep learning models when working with tabular
datasets (Grinsztajn et al., 2022; Shwartz-Ziv and
Armon, 2022; Borisov et al., 2022). Tree ensem-
ble methods rely on combining numerous decision
trees. However, the interpretability of these mod-
els remains a significant challenge, particularly for
ensemble methods that combine numerous decision
trees, resulting in less transparent models (Guidotti
et al., 2019).
A considerable amount of research has focused on
enhancing the explainability of tree ensembles and
their predictions. Widely used techniques, such as
LIME (Ribeiro et al., 2016) and SHAP (Lundberg,
2017), adopt a model-agnostic approach by analyz-
ing only the input-output relationships to produce ex-
planations. However, due to the inherent limitations
of these methods, they offer approximations, mean-
ing that the explanations they generate are neither
strictly necessary nor fully sufficient to account for
the model’s outcomes.
a
https://orcid.org/0000-0002-5100-7259
b
https://orcid.org/0000-0001-9619-1558
To address these limitations, logic-based ap-
proaches have been developed to offer formal and rig-
orous explanations by examining the internal struc-
ture of the models. These methods aim to pro-
vide guarantees about the necessity and sufficiency
of feature subsets or value ranges that influence pre-
dictions, leveraging solvers such as SAT, SMT, and
MaxSAT (Ignatiev et al., 2019a; Izza et al., 2023; Izza
and Marques-Silva, 2021; Ignatiev et al., 2019b; Ig-
natiev et al., 2022; Audemard et al., 2023).
An alternative to the computation of explana-
tions are compilation-based approaches, which com-
pile the model into a representation from which ex-
planations can be derived more efficiently (Marques-
Silva, 2024). However, a significant limitation of
these approaches is their inability to handle large and
complex models effectively (Marques-Silva, 2024).
For instance, the work of (Gossen and Steffen, 2021)
compiles a Random Forest into a single, semanti-
cally equivalent Algebraic Decision Diagram (ADD)
to provide a more interpretable representation of the
model. In (Murtovi et al., 2025a) the authors propose
a compilation-based approach to transform boosted
trees into ADDs, and how to compute abductive and
inflated explanations from these ADDs. While these
approaches provide a more efficient way to generate
explanations, they suffer from scalability issues, es-
pecially when dealing with large models, as the com-
pilation process can be computationally expensive.
In this paper, we present a compilation-based ap-
proach that transforms a random forest into a single,
484
Murtovi, A., Schlüter, M. and Steffen, B.
An Efficient Compilation-Based Approach to Explaining Random Forests Through Decision Trees.
DOI: 10.5220/0013188600003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 484-495
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

semantically equivalent decision tree. Our approach
is based on a recursive process that constructs the de-
cision tree by replacing the leaves of the first tree in
the ensemble with the next tree in the ensemble, con-
tinuing until the entire forest is integrated. By ap-
plying optimizations and heuristics, we address the
scalability issues prevalent in existing compilation-
based methods. The resulting decision tree is seman-
tically equivalent to the original random forest and
can be used to explain its predictions in a more ef-
ficient manner. Specifically, the technique presented
in (Murtovi et al., 2025a) can be used to generate ab-
ductive/inflated explanations from the decision tree.
The main contributions of this paper are as fol-
lows:
• We present a novel compilation-based approach
to compile Random Forests into a single semanti-
cally equivalent decision tree.
• We propose several optimizations and heuristics
to improve the efficiency of this transformation
process.
• We evaluate our approach by comparing it with
the state-of-the-art approach presented in (Gossen
and Steffen, 2021).
To evaluate our approach, we consider the follow-
ing research questions:
RQ1. Can our approach transform random forests
into decision trees more efficiently than exist-
ing state-of-the-art methods?
RQ2. How does the size of decision trees generated
by our method compare to those produced by
state-of-the-art techniques?
Our experimental results demonstrate that our ap-
proach is over an order of magnitude faster than the
current state-of-the-art (Gossen and Steffen, 2021),
while producing decision trees that are only slightly
larger. We believe this is a step towards scalable
and efficient compilation-based methods for explain-
ing tree ensemble models.
The remainder of this paper is structured as fol-
lows: Sec. 3 introduces decision trees, and random
forests. In Sec. 2 we discuss related work on explain-
ing random forests. Sec. 4, details our approach to
transform random forests into decision trees. In Sec. 5
we propose several optimizations and heuristics to our
approach, that improve on the time to transform the
random forest, and the size of the resulting decision
tree. We evaluate our approach in Sec. 6 by com-
paring it with the state-of-the-art approach presented
in (Gossen and Steffen, 2021). Finally, Sec. 7 con-
cludes the paper and outlines potential directions for
future work.
2 RELATED WORK
In this section, we review related work on explaining
random forests, categorizing these approaches into
heuristic methods that approximate model behavior,
logic-based methods that apply formal reasoning, and
compilation-based techniques that transform models
into interpretable forms.
2.1 Heuristic Explainability Approaches
Heuristic approaches like LIME (Ribeiro et al., 2016),
SHAP (Lundberg, 2017), and Anchor (Ribeiro et al.,
2018) aim to explain the predictions of black-box
models by approximating their behavior locally or
globally. While these methods are model-agnostic
and can be applied to any machine learning model,
they often provide approximate explanations that may
not capture the full complexity of the model.
2.2 Logic-Based Explainability
Approaches
In contrast to heuristic methods, logic-based ap-
proaches aim to provide formal and rigorous expla-
nations for model predictions by taking into account
the internal structure of the model. One type of logic-
based explanation that has become popular is abduc-
tive explanations (Ignatiev et al., 2019a). Abductive
explanations aim to identify minimal subsets of fea-
ture assignments that are sufficient to yield a specific
prediction from a model. In the context of random
forests, this involves finding the smallest set of input
features that, when fixed, guarantee the model’s out-
put for a particular instance. These explanations pro-
vide insights into which features are essential for the
prediction.
To generate abductive explanations, algorithms
often utilize formal reasoning tools such as SAT,
SMT, or MaxSAT solvers. These solvers are used to
encode the model’s decision logic into logical con-
straints and then compute minimal satisfying assign-
ments that correspond to the explanations. For exam-
ple, a SAT-based approach to generate abductive ex-
planations for random forests is presented in (Izza and
Marques-Silva, 2021), while (Ignatiev et al., 2022) in-
troduces a MaxSAT solver-based method for boosted
trees. An optimization over the latter approach, aimed
at improving the efficiency of the transformation pro-
cess, is discussed in (Audemard et al., 2023).
Another type of logic-based explanation is inflated
explanations which have been introduced in (Izza
et al., 2023). Unlike abductive explanations that only
identify a minimal set of features that are necessary
An Efficient Compilation-Based Approach to Explaining Random Forests Through Decision Trees
485

for a prediction, inflated explanations also require
an interval for each feature that cannot be increased
in either direction without changing the prediction.
In (Izza et al., 2023), the authors present an SMT-
based approach to generate inflated explanations for
random forests.
2.3 Compilation-Based Explainability
Approaches
Compilation-based approaches focus on translating
the decision process of a random forest or other com-
plex models into an interpretable form, often using
logical formulas or some other compact representa-
tion. Such representations might allow for more effi-
cient computation of explanations or reasoning about
the model’s behavior. However, these techniques are
often computationally intensive and may not scale
well to very large models (Marques-Silva, 2024).
For example, (Shih et al., 2019) presents a
compilation-based approach to transform bayesian
network classifiers into decision graphs, which en-
ables reasoning about the model’s behavior. Simi-
larly, (Shi et al., 2020) proposes a method to compile
binary neural networks into binary decision diagrams
and sentential decision diagrams.
Our approach also falls into the category of
compilation-based methods. In (Gossen and Stef-
fen, 2021; Murtovi et al., 2025b), the authors show
how to compiles Random Forests into Algebraic De-
cision Diagrams (Bahar et al., 1997) (ADDs), while
(Murtovi et al., 2025b) proposes several optimizations
to improve the efficiency of the transformation pro-
cess. In (Murtovi et al., 2025a), the authors present
a compilation-based approach to transform boosted
trees into ADDs and how to compute abductive and
inflated explanations from these ADDs. Building
upon these compilation-based methods, our approach
aims to improve efficiency of the transformation pro-
cess by transforming random forests into semantically
equivalent decision trees.
3 BACKGROUND
In this section, we introduce the relevant concepts.
3.1 Classification Problems
Classification is a supervised learning task where the
objective is to assign input instances to predefined cat-
egories or classes. Let F = {1, ..., m} denote the
set of features and C = {1, .. ., K} the set of classes.
The value of a feature j ∈ F is denoted as x
j
where
x
j
∈ R. The feature space is defined as F
:
= R
m
. We
use ⃗x = (x
1
,. .. ,x
m
) ∈ F, for an arbitrary point in the
feature space. A classifier implements a total classifi-
cation function τ : F → C , that maps each instance in
the feature space to one of the predefined classes.
3.2 Decision Trees
Decision trees (Quinlan, 1986) are a widely used class
of models for classification and regression tasks due
to their simplicity and interpretability. A decision tree
T consists of internal nodes and leaf nodes. Each
internal node represents a decision based on a fea-
ture x
j
of the form x
j
< t where t ∈ R is a thresh-
old value
1
. Based on the outcome of the decision, the
tree branches to one of two child nodes: the true child
if the condition is satisfied, and the false child other-
wise. Leaf nodes are associated with class labels and
represent the final prediction of the tree for instances
that reach them. While decision trees are easy to in-
terpret and visualize, they have a tendency to overfit
the training data, leading to high variance and reduced
generalization performance on unseen data.
3.3 Random Forests
Random forests (Breiman, 2001) address the limita-
tions of individual decision trees by constructing an
ensemble of trees. A random forest consists of n de-
cision trees T
1
,. .. ,T
n
, where each tree is trained on a
different subset of the training data. By combining the
predictions of multiple trees, random forests reduce
the variance of the model and improve the predictive
power.
Given an input instance ⃗x, each decision tree T
i
in the random forest produces a prediction T
i
(⃗x) ∈ C ,
where i = 1, .. ., n. The final prediction ˆy is then
obtained by aggregating these individual predictions
through majority voting:
ˆy = argmax
c∈C
n
∑
i=1
I(T
i
(⃗x) = c),
where I(·) is the indicator function that returns 1 if the
condition is true and 0 otherwise.
Random forests mitigate high variance associated
with single decision trees by averaging multiple trees,
thereby enhancing the model’s robustness and predic-
tive accuracy. They are also less prone to overfitting
compared to individual trees, especially when a large
number of trees are used in the ensemble.
1
The techniques discussed also extend to other types of
comparisons or categorical features.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
486
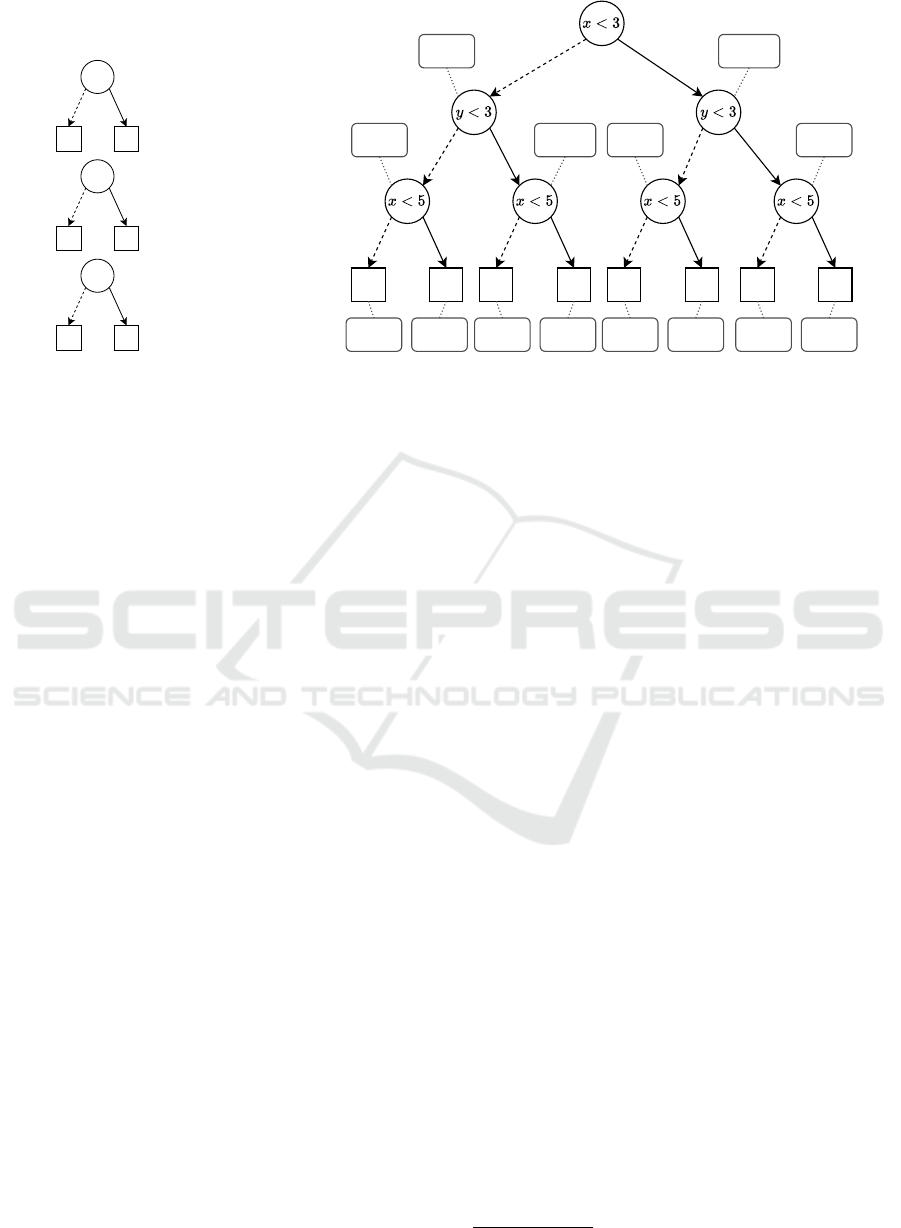
x < 3
foo bar
y < 3
bar foo
x < 5
bar foo
Figure 1: A random for-
est consisting of three
decision trees.
bar foo foo foo bar bar bar foo
foo → 2
bar → 0
foo → 0
bar → 2
foo → 0
bar → 1
foo → 1
bar → 1
foo → 2
bar → 1
foo → 1
bar → 2
foo → 3
bar → 0
foo → 2
bar → 1
foo → 1
bar → 2
foo → 0
bar → 3
foo → 2
bar → 1
foo → 1
bar → 2
foo → 1
bar → 1
foo → 1
bar → 0
3
1
2
4 5 6 7
8 109 11 12 13 14 15
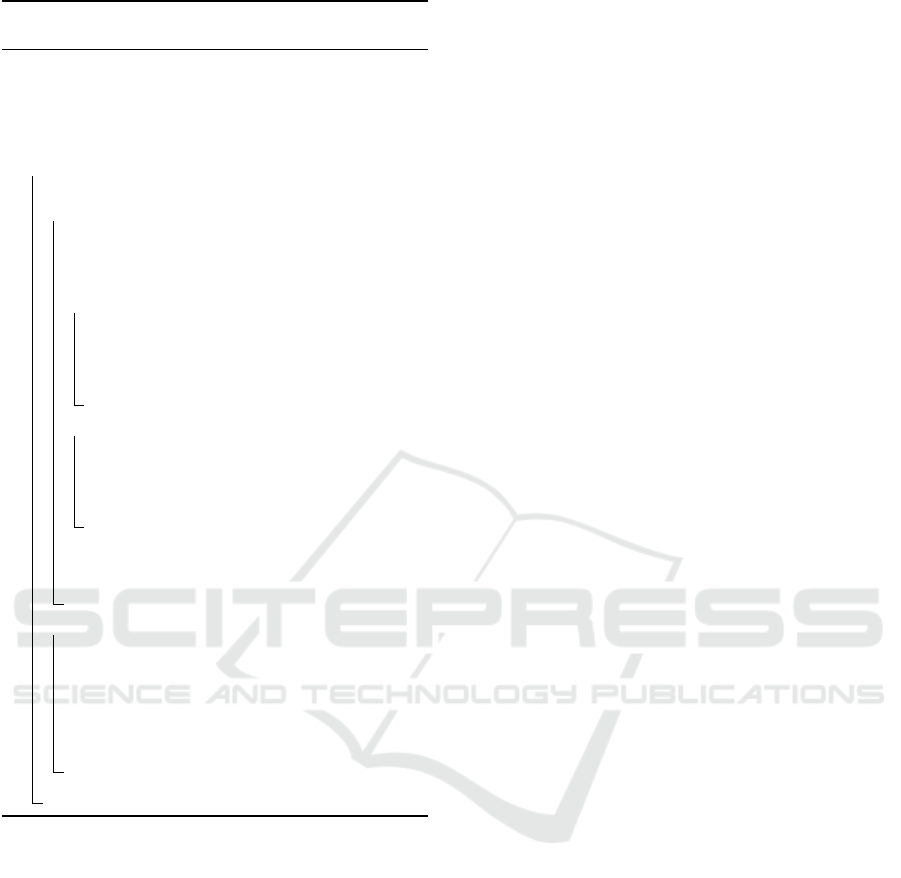
Figure 2: A single decision tree resulting from our transformation process.
4 TRANSFORMING RANDOM
FORESTS TO DECISION TREES
In this section, we present our approach to aggregate
the decision trees of a Random Forest into an indi-
vidual, semantically equivalent decision tree. The ad-
vantage of the single decision tree representation is
that it eliminates the need to keep track of the votes
for each class in the ensemble. Instead of computing
the majority class at prediction time, we just need to
traverse the decision tree to reach the leaf node with
the majority class. The core idea is to iteratively join
the decision trees of the ensemble by appending each
tree at the leaves of the current aggregate, effectively
unrolling the ensemble into a single decision tree that
represents the entire model.
For deciding what prediction is made at the leaves
of the aggregated tree, we must keep track of the votes
of the decision trees of the ensemble. For that, we
accumulate votes for each class by tracking the class
labels at the leaf nodes of each tree. When we reach
a leaf node in the last tree of the ensemble, we de-
termine the majority class based on the accumulated
votes and assign it to the corresponding leaf node in
the transformed decision tree. This ensures that for
any given input, the transformed decision tree pro-
duces the same prediction as the original ensemble,
accurately mirroring its decision-making process.
Alg. 1 outlines the transformation process. The
algorithm takes as input a random forest with decision
trees T
1
,. .. ,T
n
, the current node t
i
in tree T
i
, and an
array votes to keep track of the cumulative votes for
each class. The function RF2DT is initially called with
the root node of the first tree (t
i
= T
1
.root), and the
votes array initialized to zeros.
The algorithm recursively processes each tree in
the ensemble, starting with the first tree. When a
leaf node is reached, the algorithm increases the vote
count for the class associated with that leaf (Line 4).
If the current tree is the last in the ensemble (i = n),
it creates a leaf node in the transformed decision tree
with the class that has the most votes (Lines 5–6). If
it is not the last tree, the algorithm proceeds by recur-
sively calling RF2DT with the root node of the next
tree (T
i+1
.root) and the updated votes array. After
the recursive call, the algorithm decrements the vote
count for the current class label to backtrack correctly.
For internal nodes, the algorithm copies the decision
criteria (feature and threshold) from the current node
to a new node in the transformed tree (Line 11–12).
It then recursively processes the true and false child
nodes (Lines 13–14). The results of these recursive
calls are assigned to the corresponding child pointers
of the new node in the transformed tree. This process
ensures that all possible paths through the ensemble
are explored and represented in the single decision
tree.
Example 1. We illustrate the transformation process
with a simple example. Consider a random forest con-
sisting of three decision trees,
2
as shown in Fig. 1.
Applying our transformation process to this random
forest results in a single decision tree, as shown in
Fig. 2, which given an input directly returns the ma-
jority vote class. Consider the rightmost path in the
decision tree in Fig. 2. When we follow the true edge
2
Dotted edges represent false edges.
An Efficient Compilation-Based Approach to Explaining Random Forests Through Decision Trees
487
Algorithm 1: RF2DT: Transforming a random forest to a
single decision tree.
Input : Random Forest T
1
,. .. ,T
n
, Current
node t
i
in tree T
i
, Array votes
Output: A node in the transformed decision
tree.
1 Function RF2DT(T
1
,. .. ,T
n
,t
i
,votes):
2 Create new node newNode;
3 if t
i
is a leaf then
// Increase vote count for the
class in the current leaf
4 votes[t
i
.class] ← votes[t
i
.class] + 1;
5 if i = n then
// If processing the last
tree, create a leaf with
the majority class
6 newNode.class ← arg max
class
votes;
7 else
// Recursively call RF2DT for
the next tree in the list
8 newNode ←
RF2DT(T
1
,. .. ,T
n
,t
i+1
.root,votes);
// Backtrack the vote count
after recursion
9 votes[t
i
.class] ← votes[t
i
.class] − 1;
10 else
11 newNode. f eature ← t
i
. f eature;
12 newNode.threshold ← t
i
.threshold;
13 newNode.true ←
RF2DT(T
1
,. .. ,T
n
,t
i
.true,votes);
14 newNode. f alse ←
RF2DT(T
1
,. .. ,T
n
,t
i
. f alse, votes);
15 return newNode;
of x < 3 in the first tree, we reach the leaf node with
class foo, so the vote count for foo is increased by one
resulting in the voting vector (1, 0). We now continue
with the second tree, where we follow the true edge of
y < 3 and reach the leaf node with class bar, so the
vote count for bar is increased by one to (1, 1). Fi-
nally, we reach the last tree, where we follow the true
edge of x < 5 and reach the leaf node with class foo,
so the vote count for foo is increased by one to (2,1).
Since we are processing the last tree, we create a leaf
node with the majority class, which is foo in this case.
While the presented transformation already sim-
plifies the prediction process, it results in an expo-
nential growth in the size of the resulting decision
tree. Consider a random forest consisting of n deci-
sion trees, each with m leaf nodes. The resulting deci-
sion tree will have m
n
leaf nodes, which is infeasible
for large values of n and m. To avoid this exponen-
tial blowup, we present further optimizations that not
only improve the prediction time but also reduce the
time required for the transformation process.
5 OPTIMIZATIONS
When we take a closer look at our transformation,
we can identify several inefficiencies that can be opti-
mized.
5.1 Deduplication of Isomorphic
Subtrees
The decision tree resulting from the transformation
process can become quite large, especially for ran-
dom forests with many trees. To optimize memory
usage during the recursive construction of the deci-
sion tree, we implement a deduplication strategy that
avoids the creation of identical subtrees. Fig. 2 shows
that the subtrees beginning at the leftmost and right-
most x < 5 nodes are identical. Instead of creating two
separate instances of the same subtree, we can reuse
the existing subtree. This idea is similar to the con-
cept of deduplication in Binary Decision Diagrams
(BDDs) (Bryant, 1986) and Algebraic Decision Di-
agrams (ADDs) (Bahar et al., 1997), though they re-
quire a variable ordering to identify isomorphic sub-
graphs.
We implement this through the use of a hash map
that serves as a memoization cache for subtrees. In the
recursive process, when a new subtree is generated,
we compute a hash key that represents the subtree’s
structure and content. Before returning the new sub-
tree, we check if the key is already present in the hash
map. If it is, we return the subtree from the hash map
instead of the newly created one. Otherwise, we add
the new subtree to the hash map and return it. This
optimization significantly reduces the memory usage
during the transformation process.
5.2 Redundant Predicate Elimination
One way to optimize the transformation process is
to eliminate redundancies resulting from the predi-
cates seen along the path (Gossen and Steffen, 2021;
Murtovi et al., 2023). Consider the rightmost path in
Fig. 2. When we reach x < 5, we already know that
x < 3 is true since we followed the true edge of x < 3
in the first tree. If x < 3 is true, x < 5 must also be true,
so instead of creating a new node for x < 5, we can
directly continue with its true successor node. This
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
488

x < 5
bar
x < 3
bar
x < 2
bar
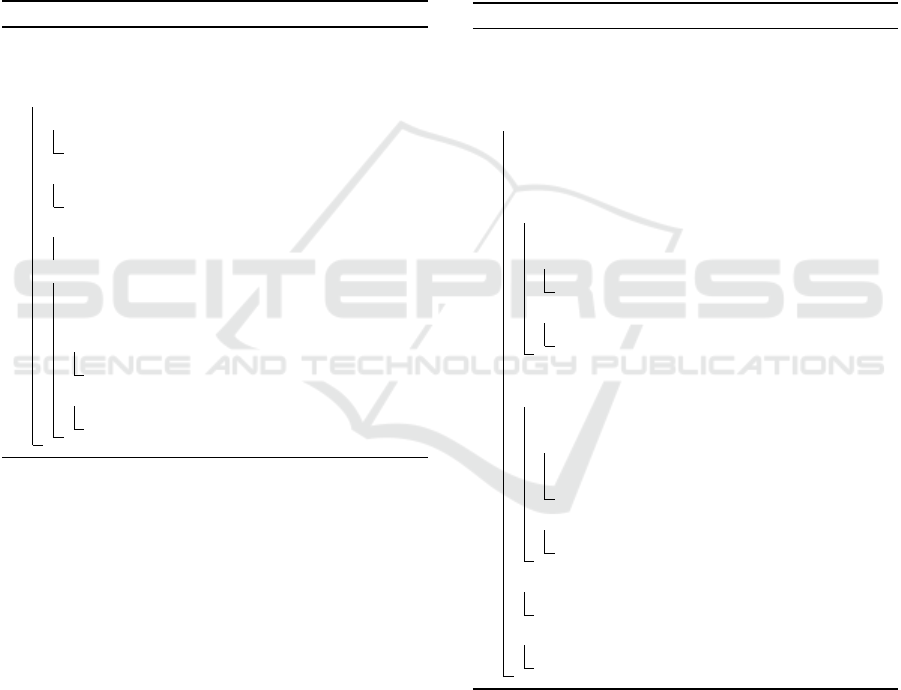
Figure 3: A random forest consisting of five decision trees.
x < 5
Figure 4: An illustration of the transformation process of
the random forest in Fig. 3.
way, we avoid having to process the false subtree of
x < 5, which reduces the size of the resulting decision
tree, and thus the time required for the transformation
process. At prediction time, we also benefit from this
optimization since we can avoid unnecessary compar-
isons.
5.3 Early Stopping
The decision tree resulting from our transformation
only returns the majority vote class, so the exact class
votes are not needed. We can make use of this fact in
the following way: During the transformation, when
we reach a leaf node in a tree, we increase the vote
count for the class associated with that leaf. If the ac-
cumulated votes for this class exceed the maximum
possible votes that any other class could obtain from
the remaining trees, we can stop the transformation
early and create a leaf node with this class. This
way, we can avoid processing the remaining trees in
the ensemble. In Fig. 1 this can be observed on two
paths, i.e., when foo receives two votes and bar zero,
and when bar receives two votes and foo zero. It is
also clear that the internal node x < 5 is redundant
in this case since both successor nodes lead to the
same class. This optimization has already been ap-
plied in (Murtovi et al., 2025b) for random forests.
Although this approach incurs some overhead due to
computing the top two classes by votes, it can signifi-
cantly reduce the overall transformation time.
5.4 Abstract Interpretation
One limitation of early stopping is that it can only be
applied after at least half of the trees have been pro-
cessed. In (Murtovi et al., 2025b) the authors propose
a non-semantic preserving approach to apply early
stopping before processing half of the trees. While
this approach is faster, it is not semantically preserv-
ing. In this paper, we present an approach based on
abstract interpretation that allows us to apply early
stopping before processing half of the trees while still
preserving semantics.
Consider the random forest in Fig. 3 consisting of
5 decision trees. When we follow the false succes-
sor of x < 5, we reach the leaf node with class bar.
Our transformation process would now proceed with
the next tree in the ensemble, and when a leaf node is
reached, proceed with the third tree and so on. When
the fourth tree is reached, we know that x < 3 must be
false since we followed the false edge of x < 5 in the
first tree, so we land in the leaf node with class bar.
The same applies to the fifth tree, where we know that
x < 2 must be false, so we also land in the leaf node
with class bar. We have now reached a leaf in the last
tree of the ensemble, so we create a leaf node with
the majority class, which is bar in this case. Fig. 4
sketches how the resulting tree would look like fol-
lowing the false edges of the first tree, and processing
just the next 2 trees in the ensemble. If we had first
processed trees 4 and 5, instead of 2 and 3, we could
have applied early stopping, and we would have cre-
ated a leaf node with class bar after processing the
third tree. In the end, the false edge of the first tree
would directly lead to the leaf node with class bar.
This would have saved us from processing the remain-
ing trees in the ensemble. We make use of this obser-
vation to apply early stopping before processing half
of the trees in the ensemble.
Alg. 2 outlines an abstract interpretation approach
to apply the early stopping before processing half of
the trees. The algorithm takes as input a node t in the
decision tree and a path condition pc, which repre-
sents the accumulated predicates along the path from
the root to the current node. When a leaf node is
An Efficient Compilation-Based Approach to Explaining Random Forests Through Decision Trees
489
reached, the algorithm returns the class label of the
leaf node (Line 3). If the path condition implies that
the predicate of the current node is always true or
false, the algorithm directly continues with the true
(Line 5) or false successor node (Line 7), respectively.
Otherwise, both successor nodes are processed. If the
class labels of the true and false successor subtrees
are the same, the algorithm returns this class label
(Line 12). If the class labels are different, the algo-
rithm returns “unsure” (Line 14), indicating that de-
pending on the input, the class label could be differ-
ent. Essentially, the algorithm returns a class if, given
the path condition, this is the only class that can be
reached, and “unsure” otherwise.
Algorithm 2: Abstract Interpretation of a Decision Tree.
Input : Node t, Path condition pc
Output: Class label or “unsure”.
1 Function AbsIntDT(t, pc):
2 if t is a leaf then
3 return t.class;
4 if pc =⇒ (t. f eature < t.threshold) then
5 return AbsIntDT(t.true, pc);
6 if pc =⇒ ¬(t. f eature < t.threshold) then
7 return AbsIntDT(t. f alse, pc);
8 else
9 trueClass ← AbsIntDT(t.true, pc);
10 f alseClass ← AbsIntDT(t. f alse, pc);
11 if trueClass = f alseClass then
12 return trueClass;
13 else
14 return “unsure”;
Alg. 3 shows how the abstract interpretation can
be used to apply the abstract early stopping optimiza-
tion. In the algorithm, the array sa f eVotes keeps track
of the number of votes each class is guaranteed to re-
ceive from the unprocessed trees, based on the current
path condition. The variable f reeVotes counts the
number of votes that can be assigned to any class from
the unprocessed trees. The algorithm calls the ab-
stract interpretation on each unprocessed tree with the
current path condition (Line 5). The result is either a
specific class label, indicating that the tree will always
predict that class given the path condition, or “un-
sure”, indicating multiple classes are possible. If the
abstract interpretation returns a class label, the algo-
rithm increases the vote count for this class (Line 7).
If the abstract interpretation returns “unsure”, the al-
gorithm increases the number of free votes (Line 9).
After processing all unprocessed trees, the algorithm
calculates totalVotes = votes[c] + sa f eVotes[c] for
each class c, combining the votes accumulated so far
with the guaranteed votes from the unprocessed trees.
It then identifies the class with the highest total votes
(max), the second-highest (secondMax), and the idx
of the class with the highest votes (idx).
The algorithm checks whether the leading class
has more votes than the sum of the second-highest
votes and the number of free votes (Line 18). If this
condition holds, it means that even if all free votes
went to the runner-up class, it still would not surpass
the leading class. In this case, the algorithm safely re-
turns the leading class as the winner (Line 19). Oth-
erwise, it returns “unsure” (Line 21), indicating that
early stopping cannot be applied yet.
Algorithm 3: Abstract Early Stopping.
Input : Random Forest T
1
,. .. ,T
n
, Tree T
i
,
Array votes, Path condition pc
Output: Winning class or “unsure”
1 Function AbsES(T
1
,. .. ,T
n
,T
i
,votes, pc):
2 Initialize: Array safeVotes[1 .. .K] of
integers with 0;
3 f reeVotes ← 0;
4 for j ← i + 1 to n do
5 class ← AbsIntDT(T
j
.root, pc);
6 if cls ̸= “unsure” then
7 safeVotes[cls] ← safeVotes[cls] +1;
8 else
9 f reeVotes ← f reeVotes + 1;
10 max, secondMax, idx ← −∞, −∞,−1;
11 for c ← 1 to K do
12 totalVotes ← votes[c] + safeVotes[c];
13 if totalVotes > max then
14 secondMax, max ← max, totalVotes;
15 idx ← c;
16 else if totalVotes > secondMax then
17 secondMax ← totalVotes;
18 if max > secondMax + f reeVotes then
19 return idx;
20 else
21 return “unsure”;
5.5 Heuristic Optimizations
While our approach based on abstract interpretation
allows us to apply early stopping before processing
half of the trees, it is computationally more expensive
than the early stopping approach proposed in (Mur-
tovi et al., 2025b). Each time we reach a leaf node
in a tree, we need to apply the abstract interpretation
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
490

on each tree that has not been processed yet. For a
tree consisting of k nodes, the time complexity of the
abstract interpretation is O(k), so if n trees still have
to be processed each with a maximum of k nodes, the
time complexity is O(n · k). To mitigate this compu-
tational overhead, we implemented a simple heuristic
that predicts when our abstract interpretation will con-
firm that a particular class is guaranteed to win. Our
heuristic consists of two parts:
• If we have already processed half of the trees, in-
stead of applying the abstract interpretation, we
directly apply the early stopping optimization.
• Otherwise, we only try our abstract interpretation
approach if the class with the most votes has re-
ceived at least 70% of the votes it could have re-
ceived so far.
This heuristic tries to avoid the computational over-
head of the abstract interpretation when it will not
provide any benefit.
Another heuristic we implemented is based on the
order of the trees in the ensemble. In general, the trees
in the ensemble can be processed in any order, and
the semantics of the resulting decision tree will be the
same. However, the order in which the trees are pro-
cessed can have an impact on the time required for
the transformation process, and the size of the result-
ing decision tree. Our heuristic uses abstract interpre-
tation to always select the next tree with the lowest
number of reachable leaf nodes. By prioritizing trees
that are simpler under the current path conditions, we
can reduce the computational effort required for the
transformation.
5.6 Optimized Transformation
Algorithm
Alg. 4 enhances Alg. 1 with the optimizations and
heuristics discussed in this section. The key differ-
ences are the following:
• The algorithm now maintains a path condition pc
that represents the predicates seen along the path
to the current node
3
. This allows the algorithm
to apply the redundant predicate elimination op-
timization which is described in Sec. 5.2. If the
path condition implies that the predicate of the
current node is always true (Line 15), the algo-
rithm can skip the creation of the current node
and directly continue with the true successor node
3
The actual implementation keeps track of an interval
for each feature which allows one to update the path con-
dition and perform the checks in Line 15 and 17 in O(1)
time.
(Line 16). Similarly, if the predicate is always
false (Line 17), the algorithm proceeds with the
false successor node (Line 18).
• A hash map uniqueMap is used to store and reuse
identical subtrees. The algorithm implements the
deduplication optimization described in Sec. 5.1
in lines 26–30.
• When a leaf node is reached in a tree, which is not
the last tree in the ensemble, the algorithm checks
if early stopping can be applied. This can either be
the early stopping optimization described in (Mur-
tovi et al., 2025b) or the abstract interpretation
based early stopping.
For reasons of space, we do not provide a full al-
gorithm for the heuristic that chooses the next tree to
process based on the number of reachable leaf nodes,
but the general idea is when the algorithm reaches a
leaf node and has to decide which tree to process next,
it uses the abstract interpretation to compute the num-
ber of reachable leaf nodes for each tree that has not
been processed yet and choose the tree with the low-
est number of reachable leaf nodes. This heuristic has
some overhead, because the algorithm always needs
to keep track of the decision trees that have not been
processed yet, whereas previously we could just pro-
cess the next tree in the list.
6 EVALUATION
This section presents an evaluation of our approach by
applying our transformation to random forests trained
on several datasets from the UCI Machine Learning
Repository (Asuncion et al., 2007). We compare our
approach to the state-of-the-art approach presented
in (Gossen and Steffen, 2021) and evaluate the impact
of our optimizations and heuristics on the transforma-
tion time and the size of the resulting decision tree.
6.1 Experimental Setup
We evaluated our approach on a machine with an
Intel(R) Xeon(R) Gold 6152 CPU 2.10GHz with
502GB of RAM. We implemented our approach in
Java and used exactly the same random forests as
in (Murtovi et al., 2025b) to ensure a fair compari-
son. These random forests were trained on datasets
from the UCI Machine Learning Repository (Asun-
cion et al., 2007) as described in Table 1.
We perform measurements with the following
configurations:
• ADD: The state-of-the-art approach presented
in (Gossen and Steffen, 2021) with the early stop-
An Efficient Compilation-Based Approach to Explaining Random Forests Through Decision Trees
491
Algorithm 4: Transform Random Forest to Decision Tree.
Input : Random Forest T
1
,. .. ,T
n
, Current node t
i
in Tree T
i
, Array votes, Path condition pc, Hash map
uniqueMap
Output: A decision tree that represents the random forest
1 Function RF2DTOpt(T
1
,. .. ,T
n
,t
i
,votes, pc, uniqueMap):
2 Create new node newNode;
3 if t
i
is a leaf then
// Increase vote count for the class in the current leaf
4 votes[t
i
.class] ← votes[t
i
.class] + 1;
5 if i = n then
// If processing leaf in the last tree, create leaf with the majority class
6 newNode.class ← argmax
class
votes;
7 else
// Recursively call RF2DTOpt for the next tree in the list
8 sa f eWinner ← earlyStop(T
1
,. .. ,T
n
,t
i
,votes, pc);
9 if sa f eWinner ̸= “unsure” then
10 newNode.class ← sa f eWinner;
11 else
12 newNode ← RF2DTOpt(T
1
,. .. ,T
n
,t
i+1
,votes, pc, uniqueMap);
// After recursive call, decrease the vote count
13 votes[t
i
.class] ← votes[t
i
.class] − 1;
14 else
15 if pc =⇒ (t
i
. f eature < t
i
.threshold) then
16 newNode ← RF2DTOpt(T
1
,. .. ,T
n
,t
i
.true, votes, pc, uniqueMap);
17 else if pc =⇒ ¬(t
i
. f eature < t
i
.threshold) then
18 newNode ← RF2DTOpt(T
1
,. .. ,T
n
,t
i
. f alse,votes, pc, uniqueMap);
19 else
20 newNode. f eature ← t
i
. f eature;
21 newNode.threshold ← t
i
.threshold;
22 newNode.true ←
RF2DTOpt(T
1
,. .. ,T
n
,t
i
.true, votes, pc ∧ (t
i
. f eature < t
i
.threshold), uniqueMap);
23 newNode. f alse ←
RF2DTOpt(T
1
,. .. ,T
n
,t
i
. f alse,votes, pc ∧ ¬(t
i
. f eature < t
i
.threshold), uniqueMap);
24 if newNode.true == newNode. f alse then
25 newNode ← newNode.true;
26 if uniqueMap.contains(newNode) then
27 return uniqueMap.get(newNode);
28 else
29 uniqueMap.put(newNode, newNode);
30 return newNode;
ping optimization presented in (Murtovi et al.,
2025b).
• DT: Our basic approach as described in Alg. 1.
• ES: Our approach with the early stopping opti-
mization from (Murtovi et al., 2025b).
• AbsES: Our approach with the abstract early stop-
ping optimization (Alg. 3).
• HEUR: Our approach with the heuristic optimiza-
tion that decides when to apply the abstract early
stopping optimization.
• ORD: Configuration HEUR extended with the
heuristic optimization that processes the trees in
the order such that the tree with the lowest num-
ber of reachable leaf nodes is processed first.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
492

ann-thyroid
(46.39s)
appendicitis
(444.73s)
banknote
(64.39s)
ecoli
(3296.77s)
glass2
(39.84s)
ionosphere
(689.35s)
iris
(2.58s)
magic
(77.61s)
mofn-3-7-10
(0.16s)
new-thyroid
(149.06s)
10
1
10
0
10
1
10
2
Speedup over ADD
phoneme
(1788.00s)
ring
(150.60s)
segmentation
(1630.89s)
shuttle
(324.88s)
threeOf9
(0.12s)
twonorm
(2246.47s)
waveform-21
(593.29s)
wine-recog
(2544.07s)
xd6
(0.22s)
Geometric Mean
10
1
10
0
10
1
10
2
Speedup over ADD
Configuration
DT
ES
AbsES
HEUR
ORD
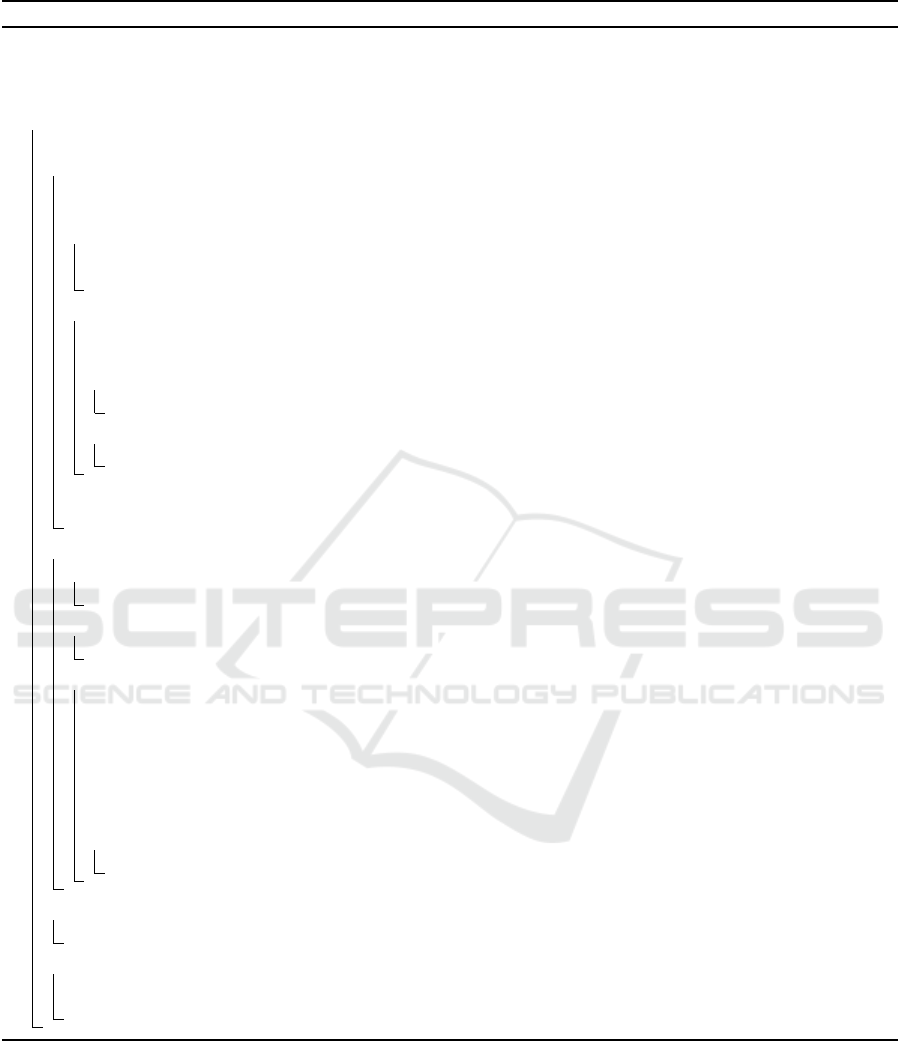
Figure 5: Speedups over ADD for the transformation of random forests into decision trees. Baseline times (in seconds) are
shown in parentheses next to dataset names.
Table 1: Overview of datasets and the learned random
forests (Murtovi et al., 2025b) (#F = Number of features,
#I = Number of test instances, #C = Number of classes, #T
= Number of trees, #N = Number of nodes in the Random
Forest, #P = Number of unique predicates, D = Maximum
depth, %A = Accuracy of the Random Forest on test set).
Dataset #F #I #C #T #N #P D %A
ann-thyroid 21 1426 3 25 555 146 4 98
appendicitis 7 22 2 50 722 207 4 90
banknote 4 270 2 100 1998 614 4 97
ecoli 7 66 5 100 2532 379 4 90
glass2 9 33 2 25 445 159 4 87
ionosphere 34 70 2 15 247 101 4 87
iris 4 30 2 100 1200 94 4 93
magic 10 3781 2 25 747 349 4 82
mofn-3-7-10 10 205 2 100 2904 10 4 85
new-thyroid 3 43 3 100 1452 237 4 100
phoneme 5 43 2 100 2836 957 4 78
ring 20 1480 2 25 625 287 4 83
segmentation 19 42 7 15 329 148 4 92
shuttle 9 11600 7 50 1296 205 4 99
threeOf9 9 103 2 100 1364 9 4 100
twonorm 29 1480 2 15 465 225 4 90
waveform-21 21 1000 3 15 465 214 4 80
wine-recog 13 36 3 25 399 152 4 97
xd6 9 103 2 100 2904 9 4 90
All configurations of our approach include the
deduplication and redundant predicate elimination
optimizations described in Sections 5.1 and 5.2.
6.2 Experimentation Results
Here, we present the results of our evaluation in which
we discuss the research questions presented in Sec. 1.
RQ1: Can our approach transform random
forests into decision trees more efficiently than ex-
isting state-of-the-art methods? Fig. 5 shows the
speedup achieved by each configuration compared
to ADD. Our approach outperforms the state-of-the-
art approach in terms of transformation time for all
datasets except for the ring dataset. The geomean
speedup across all datasets for the configurations DT,
ES, AbsES, HEUR, and ORD are 7.7, 9.5, 8.3, 12.5,
and 13.6, respectively.
The highest speedups are achieved for the ecoli
and new-thyroid datasets, where ORD is 165 and 180
times faster than ADD, respectively. For these two
datasets, ADD requires a transformation time of 3296
and 149 seconds while ORD completes the transfor-
mation in only 19.8 and 0.82 seconds, respectively.
Although AbsES is more precise than ES, and
should therefore be able to apply early stopping ear-
lier, it is slower than ES for many datasets. This is due
to the computational overhead of the abstract interpre-
tation. However, our heuristic HEUR which combines
ES and AbsES and decides when to apply which op-
timization, is faster than both ES and AbsES for most
datasets.
The only dataset where our approach is slower
than ADD is the ring dataset. For this dataset, ADD
requires a transformation time of 150 seconds, while
ORD requires 3423 seconds, so ADD is 22 times
faster than ORD. We believe this this is primarly be-
cause ADDs are more compact in this case due to their
An Efficient Compilation-Based Approach to Explaining Random Forests Through Decision Trees
493

ann-thyroid
(210832)
appendicitis
(1118961)
banknote
(57066)
ecoli
(1109022)
glass2
(420024)
ionosphere
(264003)
iris
(1802)
magic
(628529)
mofn-3-7-10
(15)
new-thyroid
(94747)
10
0
10
1
10
2
Size increase over ADD
phoneme
(1410646)
ring
(190706)
segmentation
(9216490)
shuttle
(477618)
threeOf9
(3)
twonorm
(9286188)
waveform-21
(3382041)
wine-recog
(9124186)
xd6
(46)
Geometric Mean
10
0
10
1
10
2
Size increase over ADD
Configuration
DT
ES
AbsES
HEUR
ORD
Figure 6: Size increase factor over ADD for the decision trees generated by our method. Baseline sizes (in number of nodes)
are shown in parentheses next to dataset names.
variable ordering, since for the ring dataset the ADD
is 561 times smaller than the decision tree generated
by ORD.
Overall, our approach is more efficient than the
state-of-the-art in terms of transformation time.
RQ2: How does the size of decision trees gener-
ated by our method compare to those produced by
state-of-the-art techniques? Fig. 6 presents the size
increase factor of the decision trees generated by each
configuration compared to ADD. Our approach results
in decision trees that are larger than those produced by
ADD for most datasets. The geomean size increase
factors for the configurations DT, ES, AbsES, HEUR,
and ORD are 1.39, 1.62, 1.62, 1.62, and 3.03, respec-
tively. The sizes resulting from DT, ES, AbsES, and
HEUR are actually all the same, as they all result in
the same decision tree. The difference in the geomean
is due to DT timing out and not finishing within 3
hours for the ring dataset. The size increase factor for
ORD is higher than for the other configurations, as at
each leaf it decides which tree to process next based
on the order of the trees. Processing the trees in a dif-
ferent order can result in less shared subtrees, which
increases the size of the resulting decision tree.
The largest size increase factor can be observed
for the ring dataset, where ADD generates an ADD
with 190706 nodes while ORD generates a decision
tree with 106 994692 nodes, resulting in a size in-
crease factor of 561. In general, ADDs are more com-
pact than decision trees because they enforce a vari-
able ordering that allows for more sharing of nodes.
However, for ecoli, new-thyroid, shuttle, and wine-
recog, the size of the decision tree generated by our
approaches (except for ORD) is smaller than the size
of the ADD generated by ADD.
In summary, while our approach tends to produce
larger decision trees than the state-of-the-art method
for most datasets, the size increase is moderate in
most cases.
7 CONCLUSION AND FUTURE
WORK
In this paper, we presented a novel approach to trans-
form random forests into semantically equivalent de-
cision trees. The primary motivation for this transfor-
mation is that representing the ensemble as a single
decision tree enables more efficient computation of
both abductive and inflated explanations, as demon-
strated in (Murtovi et al., 2025a). Our approach is
based on the idea of creating a single decision tree
that represents the entire ensemble. We also intro-
duced several optimizations and heuristics to improve
the transformation process. Our evaluation showed
that our approach outperforms the state-of-the-art ap-
proach in terms of transformation time by an order of
magnitude on average.
In future work, we plan to investigate further opti-
mizations and heuristics to improve the transforma-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
494

tion process. We also plan to apply our approach
to other types of tree ensembles, such as gradient
boosted trees.
REFERENCES
Asuncion, A., Newman, D., et al. (2007). Uci machine
learning repository.
Audemard, G., Lagniez, J.-M., Marquis, P., and Szczepan-
ski, N. (2023). Computing abductive explanations
for boosted trees. In International Conference on Ar-
tificial Intelligence and Statistics, pages 4699–4711.
PMLR.
Bahar, R. I., Frohm, E. A., Gaona, C. M., Hachtel, G. D.,
Macii, E., Pardo, A., and Somenzi, F. (1997). Alge-
bric decision diagrams and their applications. Formal
methods in system design, 10:171–206.
Borisov, V., Leemann, T., Seßler, K., Haug, J., Pawelczyk,
M., and Kasneci, G. (2022). Deep neural networks and
tabular data: A survey. IEEE Transactions on Neural
Networks and Learning Systems, pages 1–21.
Breiman, L. (2001). Random forests. Mach. Learn.,
45(1):5–32.
Bryant (1986). Graph-based algorithms for boolean func-
tion manipulation. IEEE Transactions on Computers,
C-35(8):677–691.
Friedman, J. H. (2001). Greedy function approximation: a
gradient boosting machine. Annals of statistics, pages
1189–1232.
Gossen, F. and Steffen, B. (2021). Algebraic aggregation
of random forests: towards explainability and rapid
evaluation. International Journal on Software Tools
for Technology Transfer, pages 1–19.
Grinsztajn, L., Oyallon, E., and Varoquaux, G. (2022). Why
do tree-based models still outperform deep learning
on typical tabular data? In NeurIPS.
Guidotti, R., Monreale, A., Ruggieri, S., Turini, F., Gian-
notti, F., and Pedreschi, D. (2019). A survey of meth-
ods for explaining black box models. ACM Comput.
Surv., 51(5):93:1–93:42.
Ignatiev, A., Izza, Y., Stuckey, P. J., and Marques-Silva, J.
(2022). Using maxsat for efficient explanations of tree
ensembles. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 36, pages 3776–3785.
Ignatiev, A., Narodytska, N., and Marques-Silva, J. (2019a).
Abduction-based explanations for machine learning
models. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 33, pages 1511–1519.
Ignatiev, A., Narodytska, N., and Marques-Silva, J.
(2019b). On validating, repairing and refining heuris-
tic ML explanations. CoRR, abs/1907.02509.
Izza, Y., Ignatiev, A., Stuckey, P. J., and Marques-Silva,
J. (2023). Delivering inflated explanations. CoRR,
abs/2306.15272.
Izza, Y. and Marques-Silva, J. (2021). On explaining ran-
dom forests with SAT. In Zhou, Z., editor, Proceed-
ings of the Thirtieth International Joint Conference
on Artificial Intelligence, IJCAI 2021, Virtual Event
/ Montreal, Canada, 19-27 August 2021, pages 2584–
2591. ijcai.org.
Lundberg, S. (2017). A unified approach to interpreting
model predictions. arXiv preprint arXiv:1705.07874.
Marques-Silva, J. (2024). Logic-based explainability: Past,
present & future. CoRR, abs/2406.11873.
Murtovi, A., Bainczyk, A., Nolte, G., Schl
¨
uter, M., and
Steffen, B. (2023). Forest GUMP: a tool for verifi-
cation and explanation. Int. J. Softw. Tools Technol.
Transf., 25(3):287–299.
Murtovi, A., Schl
¨
uter, M., and Steffen, B. (2025a). Com-
puting inflated explanations for boosted trees: A
compilation-based approach. In Hinchey, M. and Stef-
fen, B., editors, The Combined Power of Research,
Education, and Dissemination - Essays Dedicated to
Tiziana Margaria on the Occasion of Her 60th Birth-
day, volume 15240 of Lecture Notes in Computer Sci-
ence, pages 183–201. Springer.
Murtovi, A., Schl
¨
uter, M., and Steffen, B. (2025b). Voting-
based shortcuts through random forests for obtaining
explainable models. In Graf, S., Pettersson, P., and
Steffen, B., editors, Real Time and Such - Essays Ded-
icated to Wang Yi to Celebrate His Scientific Career,
volume 15230 of Lecture Notes in Computer Science,
pages 135–153. Springer.
Quinlan, J. R. (1986). Induction of decision trees. Mach.
Learn., 1(1):81–106.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ”why
should i trust you?” explaining the predictions of any
classifier. In Proceedings of the 22nd ACM SIGKDD
international conference on knowledge discovery and
data mining, pages 1135–1144.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2018). Anchors:
High-precision model-agnostic explanations. In Pro-
ceedings of the AAAI conference on artificial intelli-
gence, volume 32.
Shi, W., Shih, A., Darwiche, A., and Choi, A. (2020). On
tractable representations of binary neural networks.
arXiv preprint arXiv:2004.02082.
Shih, A., Choi, A., and Darwiche, A. (2019). Compiling
bayesian network classifiers into decision graphs. In
Proceedings of the AAAI Conference on Artificial In-
telligence, volume 33, pages 7966–7974.
Shwartz-Ziv, R. and Armon, A. (2022). Tabular data: Deep
learning is not all you need. Inf. Fusion, 81:84–90.
An Efficient Compilation-Based Approach to Explaining Random Forests Through Decision Trees
495
