
Industrial Image Grouping Through Pre-Trained CNN Encoder-Based
Feature Extraction and Sub-Clustering
Selvine G. Mathias
a
, Saara Asif
b
, Muhammad Uzair Akmal
c
, Simon Knollmeyer
d
,
Leonid Koval
e
and Daniel Grossmann
f
AImotion Bavaria, Technische Hochschule Ingolstadt, Esplanade 10, 85049 Ingolstadt, Germany
{SelvineGeorge.Mathias, Saara.Asif, MuhammadUzair.Akmal, Simon.Knollmeyer, Leonid.Koval,
Keywords:
Clustering, CNN Encoder, Convergence, C-Score.
Abstract:
A common challenge faced by many industries today is the classification of unlabeled image data from produc-
tion processes into meaningful groups or patterns for better documentation and analysis. This paper presents a
sequential approach for leveraging industrial image data to identify patterns in products or processes for plant
floor operators. The dataset used is sourced from steel production, and the model architecture integrates fea-
ture reduction through convolutional neural networks (CNNs) like VGG, EfficientNet, and ResNet, followed
by clustering algorithms to assign appropriate labels to the observed data. The model’s selection criteria com-
bine clustering metrics, including entropy minimization and silhouette score maximization. Once primary
clusters are identified, sub-clustering is performed using near-labels, which are pre-assigned to images with
initial distinctions. A novel metric, C-Score, is introduced to assess cluster convergence and grouping accu-
racy. Experimental results demonstrate that this method can address challenges in detecting variations across
images, improving pattern recognition and classification.
1 INTRODUCTION
Raw data in many plant floors tends to be unlabeled,
nasty, and unstructured due to erroneous data record-
ing and machine or robot failures. Despite these
challenges, any data arriving from the plant floors,
whether from machines directly or databases record-
ing these observational values, constitutes a readily
available source of information to work upon. One
of the important problems in investigating data is to
know the class or category or label of the data (Xu
and Tian, 2015; Xu and Wunsch, 2005). This is done
by manual inspection in most cases which is time-
consuming, inefficient, and downtime-inducing. Hav-
ing a category for the samples gives usable knowl-
edge for further analysis such as classifications. How-
ever, no standard methodology is available to ob-
tain them. This paper proposes a simple yet effec-
a
https://orcid.org/0000-0002-6549-0763
b
https://orcid.org/0009-0006-1284-5635
c
https://orcid.org/0009-0007-3961-1174
d
https://orcid.org/0009-0002-1429-6992
e
https://orcid.org/0000-0003-4845-6579
f
https://orcid.org/0000-0002-7388-5757
tive scheme of grouping obtained high-dimensional
samples into clusters based on feature reductions em-
ployed by transfer learning (TF) techniques (Cardoso
and Ferreira, 2021; Silva and Capretz, 2019).
This research varies from the current literature
in two aspects: 1) The proposed scheme presents a
pipe-lining of readily available algorithms to tackle
labeling issues and 2) this research focuses more on
the end-user application, rather than performance for
leveraging the ability to generalize this scheme across
different types of image datasets. For this study, a
public dataset has been used for comparisons of the
working of the model. This paper has been divided
into the following sections: Section 2 discusses the
prevalent applications in the literature focusing on
clustering, artificial neural networks (ANNs), and TF
approaches. Sections 3 and 4 describe the proposed
methodology and its implementation details. Sec-
tion 5 presents a discussion of the performance of
the models across the different algorithms along with
some observations. The final sections present an end-
to-end view of such an application on the production
floor and conclude with some brief thoughts on future
works.
496
Mathias, S. G., Asif, S., Akmal, M. U., Knollmeyer, S., Koval, L. and Grossmann, D.
Industrial Image Grouping Through Pre-Trained CNN Encoder-Based Feature Extraction and Sub-Clustering.
DOI: 10.5220/0013189000003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 496-506
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

2 RELATED LITERATURE
2.1 Clustering in Industrial Image Data
Clustering is an essential unsupervised learning
method used to group data points based on inherent
similarities. In industrial settings, clustering on im-
age data has become increasingly relevant due to the
rise of automated visual inspection, quality control,
and fault detection systems (Xu and Wunsch, 2005;
Xu and Tian, 2015; Oyelade et al., 2019). In the con-
text of industrial applications, images from manufac-
turing lines, assembly processes, and finished prod-
ucts are used for tasks such as defect detection, pro-
cess monitoring, and automated sorting. One of the
most commonly applied methods is k-means cluster-
ing, which groups image data based on pixel values
or features extracted from images. For instance, k-
means has been applied in industries such as semicon-
ductor manufacturing for clustering images of wafers
to identify defect patterns (Saad et al., 2015). How-
ever, simple clustering methods like k-means strug-
gle with high-dimensional and complex image data,
where the underlying features are often nonlinear and
challenging to separate into distinct clusters. In re-
sponse to these limitations, Gaussian Mixture Mod-
els (GMMs) have been applied to image clustering
tasks where pixel distributions may overlap, offering
a probabilistic framework that allows for the model-
ing of complex distributions (Zhang and Chen, 2022).
2.2 Feature-Based Clustering
Approaches
Given the high-dimensional nature of image data, di-
rect clustering on raw pixel values often proves in-
adequate. To overcome this, feature extraction tech-
niques are employed prior to clustering. Dimension-
ality reduction techniques, including PCA, t-SNE, and
UMAP, reduce complexity for high-dimensional data
clustering (van der Maaten and Hinton, 2008). Ad-
ditionally, graph-based descriptors model pixel rela-
tionships, and biologically inspired methods like Ga-
bor Wavelets mimic visual cortex processing (Daug-
man, 1985). Hand-crafted methods like HOG and
SIFT extract edge orientations and key points ro-
bust to transformations, while LBP and Gabor Fil-
ters emphasize texture and spatial frequency features,
often used in object detection and texture analysis
(Dalal and Triggs, 2005; Lowe, 2004) . Transform-
based approaches like Fourier Transform and Wavelet
Transform provide frequency and multi-resolution de-
tails critical for pattern recognition in medical or
satellite images (Strang and Nguyen, 1996). These
approaches remain indispensable in clustering high-
dimensional data, particularly, images.
The use of Convolutional Neural Networks
(CNNs) for feature extraction has been a breakthrough
in clustering industrial image data. CNNs automati-
cally learn hierarchical features from images, such as
edges, textures, and higher-level abstractions, which
can then be fed into clustering algorithms. This ap-
proach has proven effective in industries like automo-
tive manufacturing, where images of parts or compo-
nents are clustered based on defects, wear, or assem-
bly anomalies (Fan, 2024).
For instance, in automated quality inspection sys-
tems, CNNs have been used to extract relevant fea-
tures from product images, which are subsequently
clustered to identify common types of defects or cat-
egorize products based on visual similarity. These
clustering results are then utilized for quality control
and further analysis to improve the production pro-
cess (Hartner et al., 2022).
2.3 Advanced Sub-Clustering in
Industrial Image Data
In more complex industrial environments, single-
level clustering often fails to capture the fine-grained
distinctions between image data. This has led to
the development of sub-clustering approaches, where
clusters are further divided into sub-clusters to re-
veal more nuanced patterns in the data. Clustering
with more clusters partitions the entire dataset into a
larger number of groups, capturing global distinctions
across all data points. Sub-clustering, on the other
hand, refines an existing cluster into smaller groups,
uncovering localized patterns or nuances within a
specific subset. While the former provides broad
segmentation, the latter offers detailed insights into
the internal structure of predefined clusters. Sub-
clustering is particularly useful in applications like
visual inspection of textured surfaces where differ-
ent defect types may not be entirely distinct but exist
within overlapping regions in feature space (Li et al.,
2021). By identifying sub-clusters, companies can
differentiate between minor variations in defects, en-
abling better quality control.
Another sub-clustering approach is deep cluster-
ing (Xie et al., 2016; Chang et al., 2017), where deep
learning models are used to both extract features and
simultaneously perform clustering. This technique,
often involving autoencoders or self-organizing maps,
reduces the dimensionality of the image data before
clustering, revealing both coarse and fine clusters of
related images. This approach has been applied in
industrial robotics, where sub-clusters are used to
Industrial Image Grouping Through Pre-Trained CNN Encoder-Based Feature Extraction and Sub-Clustering
497
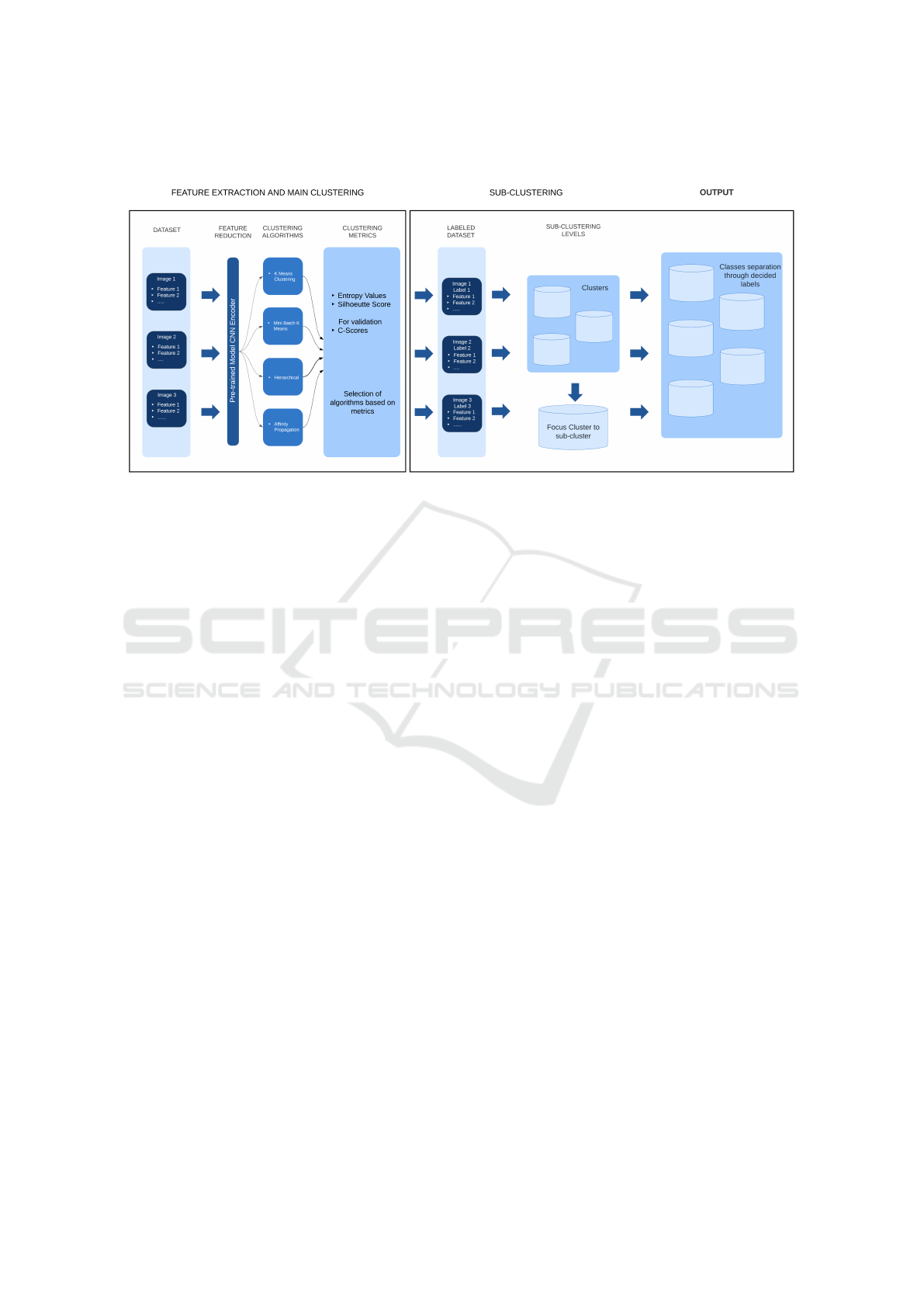
Figure 1: A Workflow Representation of the Proposed Methodology for Industrial Image Grouping.
refine the classification of object parts or tools for
improved precision in automated assembly lines (Fu
et al., 2024).
Similar to our work, the authors in (Biswas and Ja-
cobs, 2014) introduced a two-pronged strategy to en-
hance clustering effectiveness: Sub-clustering, where
the proposed algorithm focuses on clustering a subset
of images which aims to generate smaller but purer
clusters that provide representative examples from
each class and Active Sub-clustering, where to fur-
ther refine the clustering results, the authors incor-
porate human input through an active sub-clustering
algorithm. This interaction allows for more accurate
adjustments based on user feedback, leading to im-
proved clustering outcomes. Key differences are the
use of public datasets such as face image and leaf
image datasets, along with involvement of additional
cost functions that are implemented to improve clus-
ter purities that is absent from our study. A major dif-
ference is the evaluation metric, which similar to our
work, is based on Jaccard’s co-efficient. However, in
this case, the metric calculation is very different from
the one proposed later in Section 3.3.1.
2.4 Research Gap and Novel
Contributions
Despite the success of clustering techniques in indus-
trial image data analysis, several challenges remain.
One major gap in the literature is the limited use of
real-time clustering in industrial settings, particularly
for streaming image data collected from production
lines. Industrial environments often require continu-
ous monitoring and analysis of images, but traditional
clustering approaches are batch-oriented and lack the
ability to update cluster memberships dynamically as
new data arrives. Research into streaming clustering
algorithms for image data, which can handle continu-
ous data flow while maintaining performance, is still
in its infancy (Wang et al., 2023).
Additionally, current methods of clustering indus-
trial images tend to rely heavily on pre-defined fea-
tures or manual tuning of hyperparameters. For in-
stance, the performance of k-means or GMMs can be
sensitive to initialization and the selection of cluster
numbers. While CNN-based feature extraction has
alleviated some of these issues, the automatic deter-
mination of optimal cluster numbers for large-scale
image datasets remains an open problem. Further re-
search is needed into adaptive clustering techniques
that can dynamically adjust cluster numbers based on
data complexity, which would be particularly useful
in scenarios where the characteristics of image data
evolve over time.
Lastly, while sub-clustering approaches have
proven useful, there is a lack of standardization in
defining when and how sub-clustering should be ap-
plied. Current sub-clustering techniques are often
domain-specific, and there is little research into gen-
eralizable frameworks that can be applied across dif-
ferent industrial image datasets. The development of
new metrics, such as the C-Score, which aggregates
similarities between true labels and predicted clusters,
offers a promising direction for evaluating clustering
performance, particularly when sub-clusters are in-
volved. A focus on more robust evaluation metrics
and automated sub-clustering frameworks could fill
an important gap in the literature.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
498

3 METHODOLOGY
Given the increasing volume of image data from in-
dustrial environments, a widely-used unsupervised
approach that minimizes the reliance on expert knowl-
edge for image differentiation has not been thor-
oughly explored. Therefore, the methodology pre-
sented here utilizes available tools from the AI do-
main to introduce a degree of distinction when pro-
cessing acquired images (see Figure 1). However,
to draw a sense of rationality in introducing sub-
clustering, there must be some intermediate labeling
or distinction among images before clustering. This
can not only improve the separation process, but also
evaluate clustering at every level so as not to pursue
irrelevant or redundant approaches. We term this in-
termediate labeling as near-labels so as to provide a
baseline for separation. This is broadly explained in
Section 3.3.1.
3.1 Feature Reduction Through
Pre-Trained CNN Encoders
Using pre-trained CNN encoders for feature extrac-
tion involves repurposing convolutional layers from
models like ResNet, VGG, or EfficientNet, which
were trained on large datasets such as ImageNet.
These CNNs learn a hierarchical representation of
features, where early layers capture basic patterns like
edges and textures, and deeper layers represent more
abstract patterns such as object parts. To extract fea-
tures, the output from the penultimate layer of the
CNN is commonly used. This layer, typically just
before the final classification layer, provides a con-
densed high-dimensional representation of the input
image. In many architectures, this corresponds to the
”global average pooling” (GAP) layer, which pools
spatial information to form a feature vector. These
feature vectors are then used as inputs to other mod-
els or classifiers for further processing. The following
models are used here for feature extraction:
• EfficientNet-B7. A highly efficient model that
uses compound scaling to optimize depth, width,
and resolution for improved performance on im-
age classification tasks.
• InceptionV3. An advanced CNN architecture
that employs inception modules to capture multi-
scale features through parallel convolutional fil-
ters, enhancing classification accuracy.
• ResNet50. A deep residual network that intro-
duces skip connections to mitigate the vanishing
gradient problem, allowing for the training of very
deep networks with improved accuracy.
• VGG16. A straightforward and deep architecture
characterized by its use of small (3x3) convolu-
tional filters and a uniform architecture, which
significantly impacted image classification tasks.
The features extracted from these are fed to the
next step in the pipeline, namely the conventional
clustering algorithms. The selection of these mod-
els as backbone feature extractors is driven by their
high performance on ImageNet and diverse architec-
tural designs, leading to varied feature sets. VGG16
provides hierarchical feature maps through sequen-
tial convolutional layers, making it a robust general-
purpose extractor (Simonyan and Zisserman, 2015).
ResNet50, with its residual connections, allows for
deeper networks and improved feature discrimination,
addressing the vanishing gradient problem (He et al.,
2016). EfficientNetB7 achieves superior accuracy
and efficiency through compound scaling of depth,
width, and resolution (Tan and Le, 2019). Incep-
tionV3 enhances multi-scale feature extraction via in-
ception modules, enabling versatility in capturing de-
tails at various resolutions, suitable for sub-clustering
tasks (Szegedy et al., 2016). Additionally, other mod-
els replicating or extending these architectures, such
as deeper variants of ResNet or scaled versions of
EfficientNet, can also be considered for similar pur-
poses, given their alignment with the structural prin-
ciples and performance metrics of the selected back-
bones.
3.2 Conventional Clustering Approach
The authors implemented part of the methodology as
used in (Mathias et al., 2019), specifically different
clustering algorithms evaluated by entropy minimiza-
tion and silhouette score maximization across a range
of clusters, to determine the best algorithm and num-
ber of clusters for sub-clustering.
3.2.1 Algorithms
The following common clustering techniques were
used for a comparative analysis:
• K-Means
• Agglomerative (Hierarchical)
• Mini Batch K-Means
• Spectral Clustering
• Gaussian Mixture Model
The in-depth working of these algorithms is dis-
cussed in (Xu and Tian, 2015). These algorithms re-
quire the number of clusters to be fed as an input.
Each algorithm is fed the reduced data that is obtained
Industrial Image Grouping Through Pre-Trained CNN Encoder-Based Feature Extraction and Sub-Clustering
499

from the last layer of a CNN encoder, without any
scaling or augmentation. The results are based on the
metrics discussed in the next subsection.
3.2.2 Metrics for Selection of Clustering
Entropy Minimization. To address how many
clusters can be expected in a group of samples, the en-
tropy metric is computed for a cluster number (Math-
ias et al., 2019). It measures disorder in a vector and
is calculated as follows:
H(X) = −
n−1
∑
i=0
P(x
i
)log
2
(P(x
i
)) (1)
where X = x
i
is a label vector containing n unique
labels. P(x
i
) is a probability measure for every x
i
oc-
curring in X, calculated by
P(x
i
) =
no. of occurrences of x
i
length of X
A higher entropy value indicates more disorder in
the vector and hence, minimization is seen as a good
measure to determine the number of clusters for anal-
ysis. Once an ideal range is identified, the clustering
techniques are applied to the data for each number in
the range.
Silhouette Score. This score evaluates the similar-
ity of an object to its own cluster or group (Mathias
et al., 2019). It is calculated as follows:
S(x
i
) =
b(x
i
) − a(x
i
)
max{a(x
i
), b(x
i
)}
(2)
where b(x
i
) represents the smallest mean distance
of x
i
to all points in any other cluster except its own
and a(x
i
) is the mean distance between x
i
and all other
points in its own cluster. Silhouette Score is the av-
erage of all such S(x
i
) showing how tightly points are
clustered. It lies between −1 and 1, 1 denoting the
best case.
The performance of the algorithms is evaluated
using Silhouette scores with the maximum score be-
ing the best across all the algorithms and the range of
clusters.
3.3 Sub-Clustering Scenario
Once main clusters are formed in the given dataset
through appropriately selected algorithms, sub-
clustering is based on the cluster that needs more sep-
aration. Visually, this can be seen when the clus-
ters are well separated corresponding to higher sil-
houette scores and lower entropy values. However,
sub-clustering becomes necessary when the target en-
tities are contained in a particular cluster or group. To
proceed, we implement the same pipeline as in Sec-
tion 3.2. In addition to that, we also calculate an addi-
tional metric that serves the purpose of near-labeling.
This is explained in the following subsection.
3.3.1 C-Score
This is a novel metric used to evaluate the perfor-
mance of clustering algorithms by measuring the
overlap between true labels and predicted clusters. It
is defined as the sum of Jaccard similarities for all
pairs of true labels C
t
and predicted clusters C
p
:
C-Score =
k
∑
i=1
m
∑
j=1
J(C
ti
,C
p j
) =
k
∑
i=1
m
∑
j=1
|C
ti
∩C
p j
|
|C
ti
∪C
p j
|
,
where k represents the total number of unique true
labels and m represents the total number of predicted
clusters.
The summation calculates the amount of common
points to the total number of points in the two sets
and runs over all classes available, in the true classes
as well as clusters formed, and does not the count
the equality of the number of clusters to the actual
classes. Thus, a clustering algorithm might have de-
tected more patterns than the actual known classes if
more clusters are formed during clustering. Simply
speaking, this metric measures the amount of inter-
sections among the clusters from two different clus-
terings or groupings. It does not necessarily represent
similarity or closeness of clusters, since the computa-
tion can exceed to higher numbers depending on the
intersections. Higher C-Score implies good amount
of intersections, for example, a defect class contained
in a cluster. The ’convergence’ alludes to the possibil-
ity that as more clusters are formed, a targeted class
may coincide with one of the clusters.
In the case of converged clustering, where each
predicted cluster contains exactly one true label and
no points from other labels, the points of each true
label C
ti
are distributed across multiple disjoint clus-
ters C
p j
1
,C
p j
2
, .. . , with each cluster containing only
points from C
ti
. For each pair where C
p j
contains
points from C
ti
, we have:
|C
ti
∩C
p j
|
|C
ti
∪C
p j
|
=
|C
ti
∩C
p j
|
|C
ti
|
(3)
Since the clusters are disjoint and cover all points
in C
ti
, the sum of these ratios for a true label C
ti
be-
comes:
∑
j
|C
ti
∩C
p j
|
|C
ti
|
= 1 (4)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
500

Repeating this for all true labels C
ti
, the total C-Score
is:
C-Score =
k
∑
i=1
1 = k (5)
Thus, under converged clustering, the C-Score
converges to k, the total number of true labels. The
equation for C-Score is symmetric with respect to k
and m, so in effect, the C-Score converges to the min-
imum of the two numbers in case of converged clus-
tering, i.e. we can say that generally,
0 < C-Score ≤ min{k, m} (6)
To provide a balanced and interpretable evaluation
of clustering performance, the C-Score is normalized
by the product of k and m:
Normalized C-Score =
C-Score
k × m
.
This normalization yields a metric that ranges
from 0 to 1, where a score of 1 indicates perfect
clustering alignment between the true labels and pre-
dicted clusters. By dividing the C-Score by k ×m, the
normalized C-Score accounts for both the number of
true labels and clusters, facilitating meaningful com-
parisons across different datasets and clustering solu-
tions. This approach ensures that the evaluation met-
ric is sensitive to both the richness of the true label
space and the granularity of the clustering outcome.
Hence, after normalization, the limits for converged
clustering would be
0 < Normalized C-Score ≤ min
1
k
,
1
m
(7)
Since for every execution, the number of clusters
are varying, it is impractical to consider only the max-
imum C-Score. Hence, after obtaining the normalized
C-Score, it is subtracted from its upper limit to cal-
culate the Convergence Difference. This difference,
referred to as the C-Score Convergence Difference,
is minimized to determine the optimal algorithm and
number of clusters going forward.
3.4 Post-Clustering Layer Alternatives
Incorporating a post-clustering layer into the method-
ology introduces an additional stage of analysis that
can refine the results obtained from the initial cluster-
ing process. This layer can utilize classification algo-
rithms, such as support vector machines (SVM), deci-
sion trees, or neural networks, to assign specific labels
or categories to the clusters formed in the preceding
step. Alternatively, other algorithms like anomaly de-
tection, regression models, or rule-based systems can
be applied, depending on the objective of the analysis.
The purpose of this post-clustering stage is to lever-
age the inherent structure identified by the clustering
to perform a more granular classification or to extract
further insights by combining cluster properties with
supervised learning methods. Such a hybrid approach
enhances the interpretability of clusters by associat-
ing them with known classes or patterns, enabling a
more comprehensive understanding of the data.
4 IMPLEMENTATION
4.1 Dataset Overview
The data used in this study consists of images from
the Severstal Steel images (SS) dataset (Grishin et al.,
2019). It consists of images of steel produced at the
end of a production line obtained from the popular
data science website Kaggle. Although this dataset
comprises of multiple defect classes, the authors have
combined all defect class labels as a single near-label
to evaluate the methodology outlined in this study.
For practical application to avoid high time com-
plexity, the authors chose to take 1000 images for
training. These contain almost an equal amount of
two classes, namely near-label 0 corresponding to
non-defect images and near-label 1 corresponding to
defect images. Each image consists of dimensions
256 × 1600 × 3 grey-scaled for identifying different
pixels in the images that may or may not correspond
to a fault. An example image is shown in Figure 3
where the grey-scaled image shows a visible impact
region.
4.2 Model Training
The framework is only dependent on CNN encoders
for feature extraction, whereas the training is only un-
dertaken during the clustering process. This leads to a
reduction of the run-time of the outlined framework,
thereby making it efficient for inclusion in a larger
pipeline.
Post feature extraction, the clustering algorithms
are run for a fixed range of clusters from 2 to 50.
For each algorithm and number of clusters, the cor-
responding metrics from Section 3.2.2 are calculated
leading to a criteria for selection. Principal Compo-
nent Analysis (PCA) is applied to the input data to
improve time complexity of applying multiple clus-
tering algorithms in a sequence. However, the PCA
is only kept to minimum of the size of the input, i.e.
either the number of samples or features.
Industrial Image Grouping Through Pre-Trained CNN Encoder-Based Feature Extraction and Sub-Clustering
501
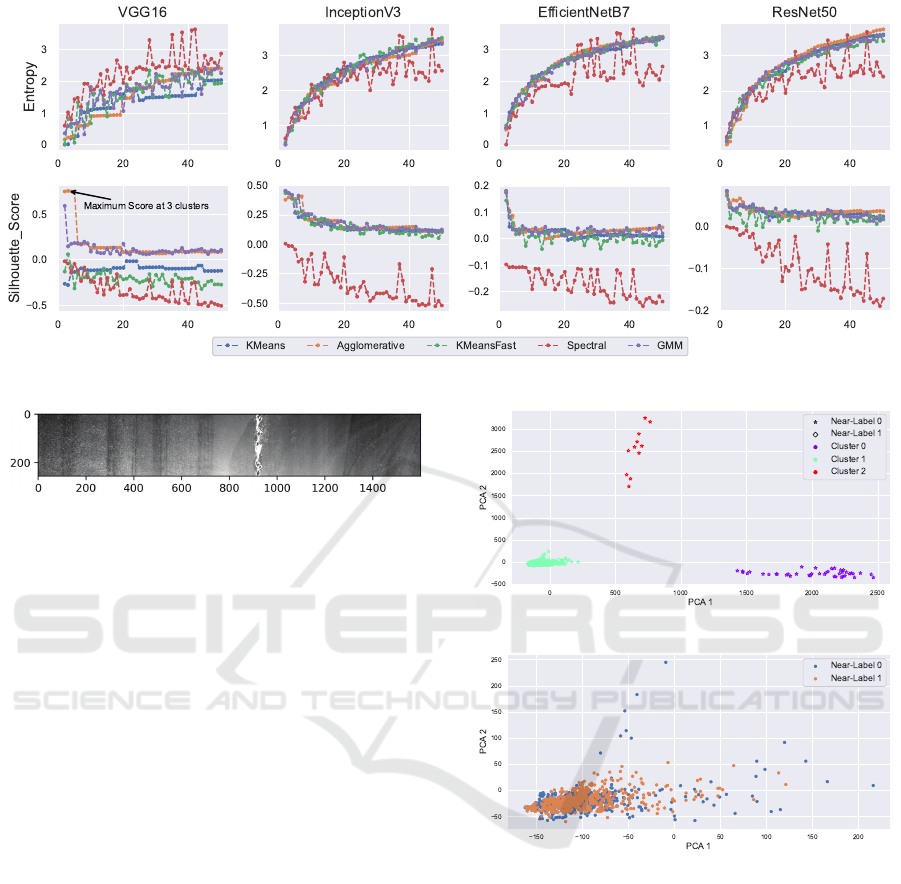
Figure 2: Entropy and Silhouette Scores for the Main Clustering on CNN Encoder-Based Data.
Figure 3: Grey-scaled Pre-processed Image from SS
Dataset.
We follow the ’Min-Max’ criteria established in
(Mathias et al., 2019) to exclude those algorithms that
exude larger entropy and minimum silhouette scores.
This leads to a range of clusters that can be contended
with for further analysis. This process is repeated
for every level of sub-clustering, however, the use of
’Min-Max’ criteria or the C-Score is subject to the
user based on the observed clusters.
5 RESULTS
The extraction of features using the CNN models rea-
sonably is the primary time-consuming step in the
proposed approach. However, it eliminates the need
for computationally intensive clustering on raw inputs
directly. Additionally, this approach avoids the com-
plexity and resource burden of designing custom fea-
ture extraction methods tailored to specific datasets.
The trade-off lies in leveraging these optimized mod-
els, whose outputs can exceed expectations by deliv-
ering robust, transferable representations that enhance
the efficiency and reliability of subsequent clustering
tasks. This balance between computational efficiency
and effective feature extraction highlights the practi-
cality of using these available models.
(a) Agglomerative Clustering of Reduced Features with 3 Clusters.
(b) Cluster 1 which contains all Near-Labels 1.
Figure 4: Main Clustering Best Performance.
5.1 Main Clustering Evaluation
The performance of the CNN encoders, evaluated
using Min-Max approach of Entropy and Silhouette
Score is presented in Figure 2 with entropy shown in
the top row and silhouette scores in the bottom row.
Entropy. For all architectures, entropy consistently
increases as the number of clusters grew, indicating
higher disorder in cluster assignments as more clus-
ters were formed. This trend was observed across
all models, reflecting a general increase in complexity
with additional clusters.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
502
Silhouette Score. The silhouette scores follow a
different pattern, peaking early and progressively de-
creasing as the number of clusters increased. For
VGG16, the maximum silhouette score is observed at
3 clusters, as indicated by the labeled point in the fig-
ure. This suggests that the optimal number of clusters
for VGG16 is 3, offering the best separation and co-
hesion among clusters. Beyond 3 clusters, silhouette
scores declined for all networks, and in several cases,
the scores dropped to negative values, particularly for
the red cluster, indicating poor clustering quality.
Across all models, the initial silhouette scores in-
dicated strong clustering quality, but the drop in per-
formance as the number of clusters increased suggests
that over-clustering likely occurred, leading to less
meaningful groupings. The results show that VGG16
was the most effective at maintaining cluster quality,
with 3 clusters yielding the most optimal outcome in
terms of the silhouette score.
For the purpose of visualization, the extracted data
from VGG16 was further reduced to two components
based through PCA. Figure 4 presents the best per-
forming clustering algorithm, i.e Agglomerative on
this data. Figure 4a) shows the distinctly clustered
group of points into 3 well-distanced groups while
Figure 4b) shows the focus cluster 1 which contains
all the near-labels 1 of the original data.
5.2 Sub-Clustering Evaluation
Once the main clustering is done, the necessity of sub-
clustering is dependent on the user. In this case, we
applied the same methodology as in the main cluster-
ing. However, the evaluation at later levels is done ei-
ther using Min-Max criteria or through C-Score Con-
vergence Difference to identify which algorithm and
what number of clusters are effective in discerning the
near-labels in smaller groups. For example, after main
clustering, level 1 clustering yields the results shown
in Figure 5.
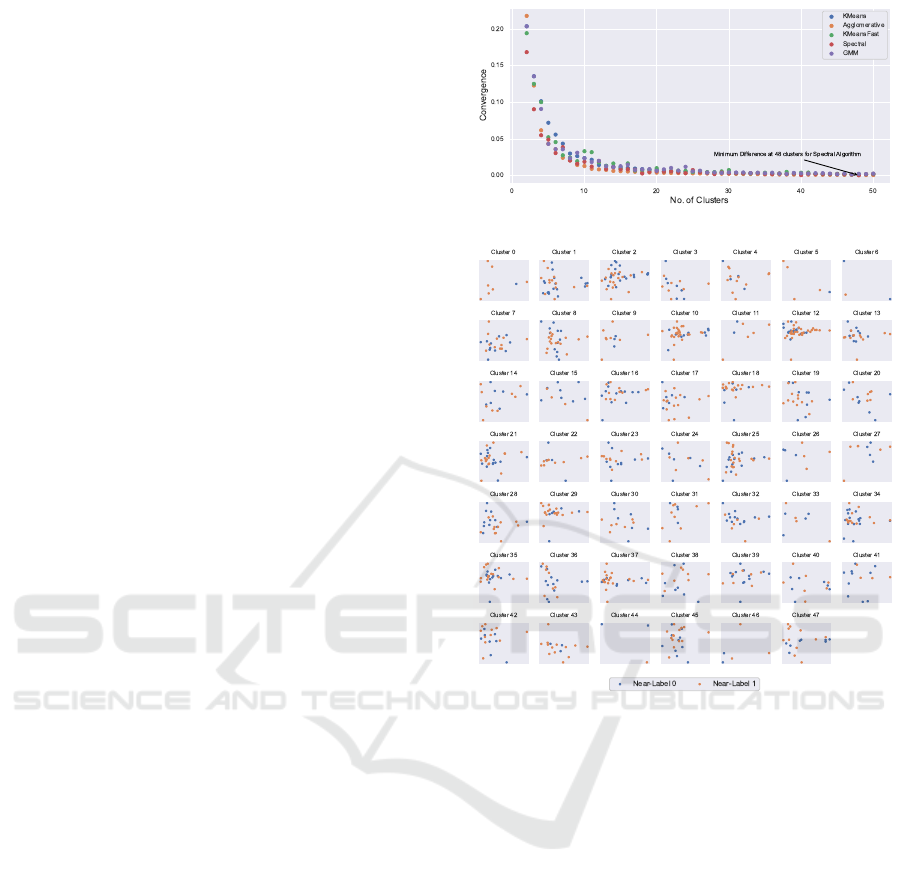
The C-Score Convergence Difference yields the
minimum value for the Spectral algorithm with 48
clusters of main cluster 1 in the previous step (see
Figure 5a)). The 48 clusters are shown in Figure 5b)
which shows some dominant groupings with respect
to near-labels. For example, clusters 0, 5, 8, 11, 22,
29, 43, and 46 mainly consist of near-label 1. Many
clusters are still visibly indistinguishable with respect
to the initial labels like clusters 2, 12, 21, 25, and
42. Since elements are grouped into small sizes, it
becomes easier to work with smaller clusters to make
a certain distinction through near-labels. For this rea-
son, cluster 25 was chosen for the next sub-clustering.
As more clusters are formed, the C-Score Con-
(a) C-Score Convergence Difference at Level 2 Clustering.
(b) Best Performing Spectral Algorithm with 48 Clusters.
Figure 5: Level 1 Clustering of Cluster 1 from Main Clus-
tering.
vergence Difference will eventually lead to the mini-
mum score of 0 as the number of clusters matches the
number of samples. In level 2 clustering, since clus-
ter 25 only had 33 points, the authors chose to only
work with 2 clusters, same as the number of near-
labels. The corresponding clusters for each algorithm
are shown in Figure 6. At this stage, the decision
to select the appropriate clusters is dependent on the
user. For example, GMM clustering for two clusters
shows that cluster 1 must be inspected deeply, since
cluster 1 mainly contains near-labels 1. However,
GMM also exihibits the best clustering since most of
near-labels 1 are entirely contained in cluster 1 while
cluster 0 has a majority of near-labels 0. Observably,
cluster 0 can be well separated further into 2 clusters
with sub-clustering imminent for cluster 1. The au-
thors have, however, chosen to halt the sub-clustering
process at this level to avoid redundancy.
Industrial Image Grouping Through Pre-Trained CNN Encoder-Based Feature Extraction and Sub-Clustering
503
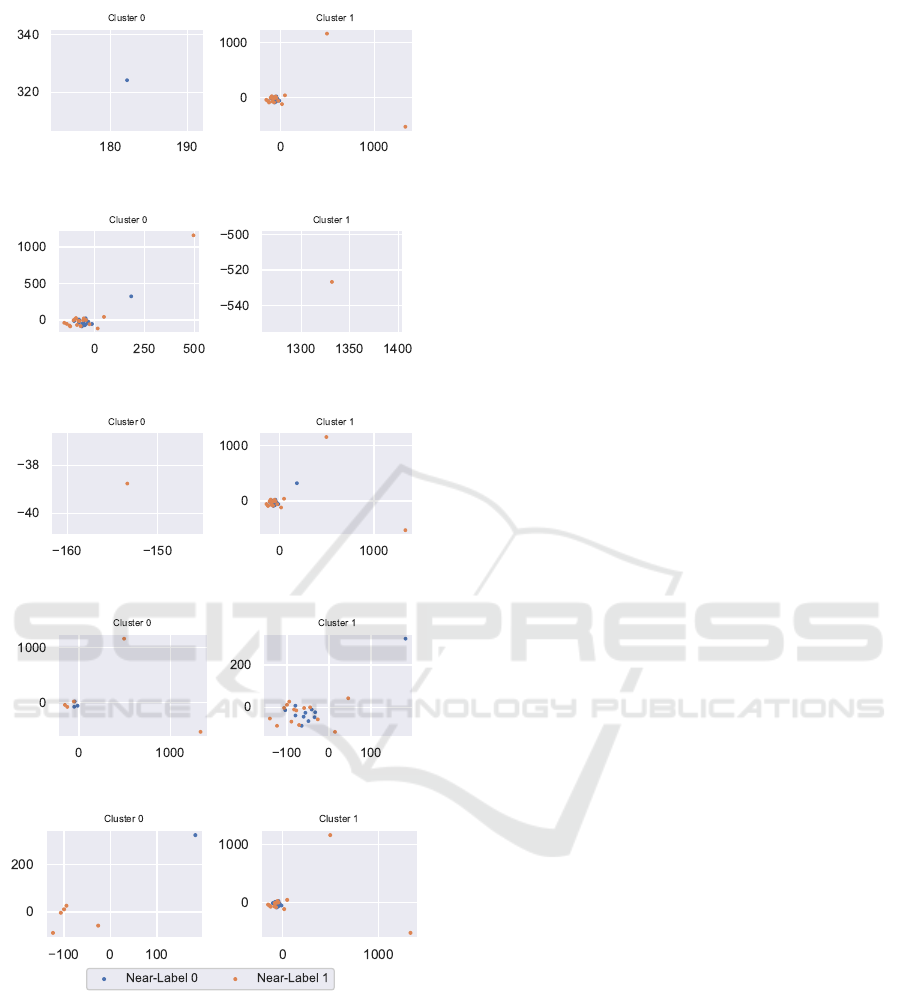
(a) KMeans Clustering.
(b) Agglomerative Clustering.
(c) KMeansFast Clustering.
(d) Spectral Clustering.
(e) GMM Clustering.
Figure 6: Level 2 Clustering of Cluster 25 from Level 1
Clustering.
5.3 Observations
We make some observations from the employed
scheme of sub-clustering:
• In main clustering, it is evident that using just
available CNN encoders for feature extraction is
sufficient in some cases to mark a certain bound-
ary between images, as in Figure 4. However, this
does not guarantee that the extraction or clustering
gives optimal results.
• The C-Score is a set-related metric, hence it can
be used to decide the similarity between collec-
tions. However, in this scenario, it is only useful
when some initial distinction is available to judge
the quality of clustering.
• In the absence of near-labels, sub-clustering is
purely visual, with only distances between sam-
ples determining cluster structures and no other
information.
• For sub-clustering, since the number of samples
is reduced, this scheme can also incorporate other
feature reduction techniques on the same data
within sub-clustering levels. This can help in im-
proving clustering. However, this has not been
implemented in this study to avoid an overload of
framework execution.
6 AN END-TO-END LABELING
SCHEME IN PRODUCTION
ENVIRONMENTS
To augment the undertaken experiment, an end-to-end
labeling scheme can be constructed using only the ba-
sic tools of machine learning, as shown in Figure 7.
In any application building, the finer front-end archi-
tecture is dependent on the end-user/client. However,
on the production floor, a simple working application
that comprises of database, clustering algorithms and
neural networks is beneficial for the operator to im-
mediately inspect product quality without waiting for
deeper quality inspection. The operator also benefits
through clustering in identifying varying processes
from the captured images. For example, as seen in
Figure 4a), three patterns are distinctly recognized by
the algorithms with one cluster completely contain-
ing the defect labels. The other groups of points can
be further investigated for mechanical properties or
process related parameters issues.
To complete such a predictive application, an ap-
plication workflow that begins with capture of image,
then flows through a storage such as database, passed
through a pre-trained model prediction followed by a
custom classification to obtain groups is a fairly easy
task as long as the architecture remain in one location
such as a local PC. The complexity however increases
when the distribution of layers is across different plat-
forms such as cloud storage for data, followed by re-
mote location of analysing PC and output transmis-
sion to correct users/clients. This falls in the domain
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
504
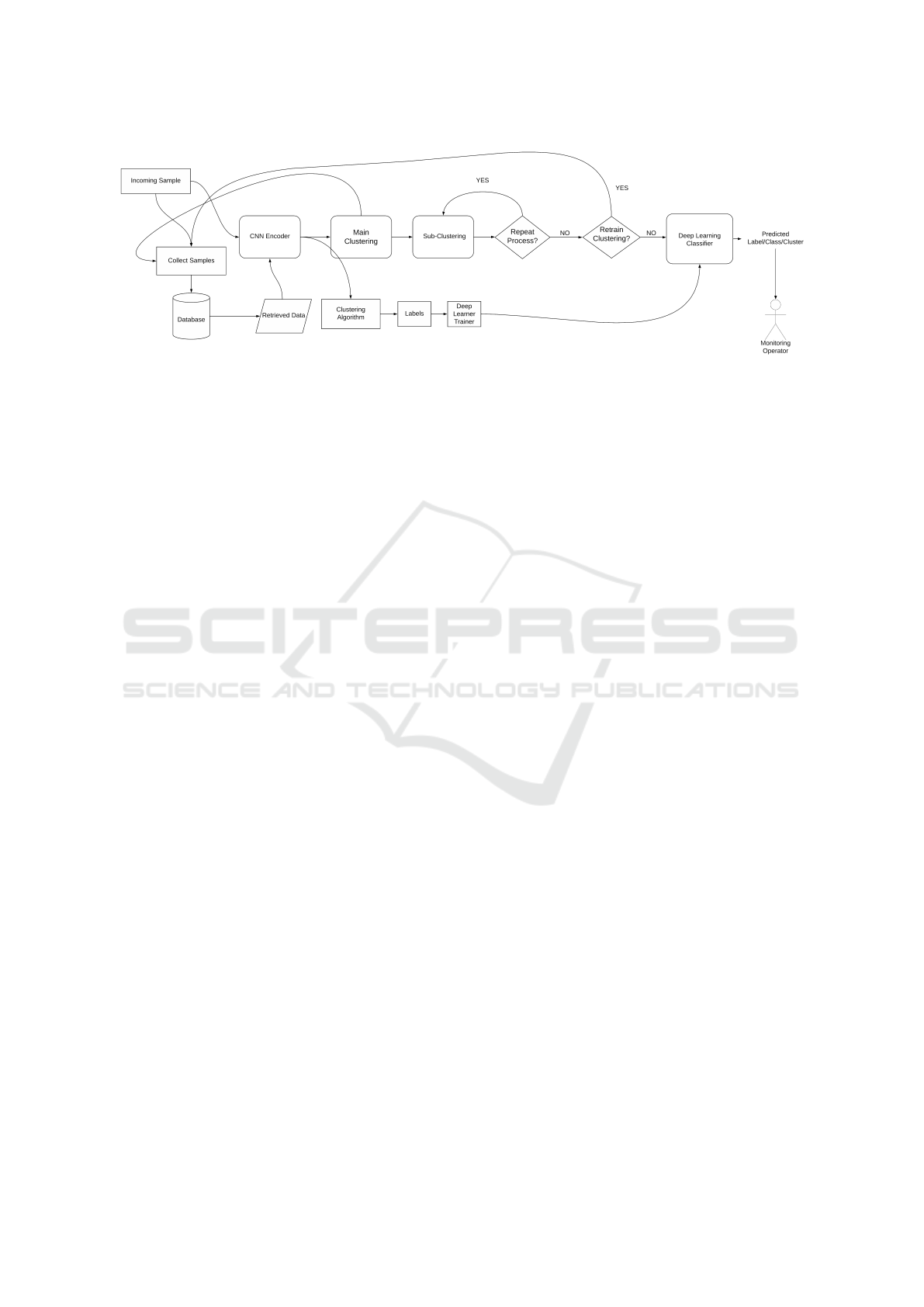
Figure 7: An End-to-End Labeling Scheme with Sub-Clustering.
of Internet-of-Things which can be investigated in fu-
ture research.
7 CONCLUSION
A labeling scheme involving a transfer learning ap-
proach utilizing available CNN encoders for feature
extraction of industrial images and transferring them
to clustering algorithms for cluster labels is presented.
The layers of the architecture can be varied accord-
ing to the user requirements, for example, replacing
CNN networks with custom nets which is an addi-
tional advantage. Similarly, the clustering algorithms
used can also be varied depending on the problem re-
quirement. The results that are presented show that
such a scheme if developed for production floors, it
can assist the monitoring operators in detecting vary-
ing patterns which are critical in avoiding defects or
anomalies. Because pre-trained models are used, it
is clear that analysis becomes more efficient and ro-
bust as no customized feature extraction or advanced
knowledge of process or product is required to la-
bel/group the incoming samples. The applicability of
this approach can also be considered to be very broad
since images are fed directly into the feature extrac-
tion steps without any pre-requisite condition of their
origin. An outlook on the development of a working
application on the production floor is also discussed.
The focus in this study is not improvement of pro-
posed methodology, rather the practical application in
real-time scenarios. Improvement of clustering algo-
rithms can be further undertaken in a deeper studies
involving multiple datasets, varied CNN models and
comparisons with established baselines. Some topics
related to cluster convergence through C-Score and
cluster profiling of image-based data can be investi-
gated in future works.
REFERENCES
Biswas, A. and Jacobs, D. (2014). Active subclustering.
Computer Vision and Image Understanding, 125:72–
84.
Cardoso, D. and Ferreira, L. (2021). Application of predic-
tive maintenance concepts using artificial intelligence
tools. Applied Sciences, 11(1).
Chang, J., Wang, L., Meng, G., Xiang, S., and Pan, C.
(2017). Deep adaptive image clustering. In 2017 IEEE
International Conference on Computer Vision (ICCV),
pages 5880–5888.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In 2005 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR’05), volume 1, pages 886–893
vol. 1.
Daugman, J. G. (1985). Uncertainty relation for resolution
in space, spatial frequency, and orientation optimized
by two-dimensional visual cortical filters. J Opt Soc
Am A, 2(7):1160–1169.
Fan, C.-L. (2024). Multiscale feature extraction by using
convolutional neural network: Extraction of objects
from multiresolution images of urban areas. ISPRS
International Journal of Geo-Information, 13(1).
Fu, K., Dang, X., Zhang, Q., and Peng, J. (2024). Fast
uois: Unseen object instance segmentation with adap-
tive clustering for industrial robotic grasping. Actua-
tors, 13(8).
Grishin, A., V, B., iBardintsev, inversion, and Oleg (2019).
Severstal: Steel defect detection.
Hartner, R., Komar, J., and Mezhuyev, V. (2022). An ap-
proach for increasing the throughput of a cnn-based
industrial quality inspections system with constrained
devices. In Proceedings of the 2022 11th International
Conference on Software and Computer Applications,
ICSCA ’22, page 179–184, New York, NY, USA. As-
sociation for Computing Machinery.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Industrial Image Grouping Through Pre-Trained CNN Encoder-Based Feature Extraction and Sub-Clustering
505

Li, W., Hannig, J., and Mukherjee, S. (2021). Subspace
clustering through sub-clusters. Journal of Machine
Learning Research, 22(53):1–37.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Mathias, S. G., Großmann, D., and Sequeira, G. J. (2019). A
comparison of clustering measures on raw signals of
welding production data. In 2019 International Con-
ference on Deep Learning and Machine Learning in
Emerging Applications (Deep-ML), pages 55–60.
Oyelade, J., Isewon, I., Oladipupo, O., Emebo, O.,
Omogbadegun, Z., Aromolaran, O., Uwoghiren, E.,
Olaniyan, D., and Olawole, O. (2019). Data cluster-
ing: Algorithms and its applications. In 2019 19th
International Conference on Computational Science
and Its Applications (ICCSA), pages 71–81.
Saad, N., Sabri, N. M., Hasan, A., Ali, A., and Saleh, H. M.
(2015). Defect segmentation of semiconductor wafer
image using k-means clustering. In Design and Devel-
opment of Sustainable Manufacturing Systems, vol-
ume 815 of Applied Mechanics and Materials, pages
374–379. Trans Tech Publications Ltd.
Silva, W. and Capretz, M. (2019). Assets predictive main-
tenance using convolutional neural networks. In 2019
20th IEEE/ACIS International Conference on Soft-
ware Engineering, Artificial Intelligence, Networking
and Parallel/Distributed Computing (SNPD), pages
59–66.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In Bengio, Y. and LeCun, Y., editors, 3rd Interna-
tional Conference on Learning Representations, ICLR
2015, San Diego, CA, USA, May 7-9, 2015, Confer-
ence Track Proceedings.
Strang, G. and Nguyen, T. (1996). Wavelets and Filter
Banks. Wellesley-Cambridge Press, Philadelphia, PA.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. In 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
2818–2826.
Tan, M. and Le, Q. (2019). EfficientNet: Rethinking model
scaling for convolutional neural networks. In Chaud-
huri, K. and Salakhutdinov, R., editors, Proceedings of
the 36th International Conference on Machine Learn-
ing, volume 97 of Proceedings of Machine Learning
Research, pages 6105–6114. PMLR.
van der Maaten, L. and Hinton, G. (2008). Visualizing data
using t-sne. Journal of Machine Learning Research,
9(86):2579–2605.
Wang, X., Wang, Z., Wu, Z., Zhang, S., Shi, X., and Lu, L.
(2023). Data stream clustering: An in-depth empirical
study. Proc. ACM Manag. Data, 1(2).
Xie, J., Girshick, R., and Farhadi, A. (2016). Unsuper-
vised deep embedding for clustering analysis. In Bal-
can, M. F. and Weinberger, K. Q., editors, Proceed-
ings of The 33rd International Conference on Ma-
chine Learning, volume 48 of Proceedings of Machine
Learning Research, pages 478–487, New York, New
York, USA. PMLR.
Xu, D. and Tian, Y. (2015). A comprehensive survey
of clustering algorithms. Annals of Data Science,
2(2):165–193.
Xu, R. and Wunsch, D. (2005). Survey of clustering al-
gorithms. IEEE Transactions on Neural Networks,
16(3):645–678.
Zhang, Q. and Chen, J. (2022). Distributed learning of fi-
nite gaussian mixtures. Journal of Machine Learning
Research, 23(99):1–40.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
506
