
Social Laws for Multi-Agent Pathfinding
Jan Slez
´
ak, Jakub Mestek
a
and Roman Bart
´
ak
b
Charles University, Faculty of Mathematics and Physics, Prague, Czech Republic
Keywords:
Path-Finding, Social Laws, Multi-Agent Environment.
Abstract:
Multi-agent pathfinding (MAPF) is the problem of finding collision-free plans for navigating a set of agents
from their starting positions to their destinations. Frequently, rigid plans for all agents are centrally searched
and perfect execution of actions is assumed, which raises issues with the uncertainty and the dynamicity of
the environment. Social laws are a well-established paradigm in multi-agent systems to coordinate agents that
avoid extensive negotiation. In this work, we present a decentralized online algorithm to solve the MAPF
problem without the need for communication between agents. This approach uses social laws inspired by
traffic rules.
1 INTRODUCTION
Multi-agent pathfinding (MAPF) deals with navigat-
ing a set of agents in a shared environment. The task
of MAPF is to find plans for agents that take them
from their starting locations to their destinations while
ensuring that the agents do not collide with each other
(Stern et al., 2019). The environment is represented
by a graph G (vertices model locations and edges
connections between them), and time is assumed to
be discrete. In each time step t, every agent is lo-
cated in a vertex of G, and between two consecutive
time steps, every agent performs one of the possible
actions, either wait at the current vertex or move to
a neighbor vertex. Various forms of collisions have
been defined (Stern et al., 2019), but in general, two
agents should not be simultaneously at the same lo-
cation (vertex or edge). MAPF has numerous appli-
cations in areas such as automated warehouses, cross-
roads control, and navigation of non-player characters
in video games.
When executing the plans, the perfect synchro-
nization of agents is assumed, which is unrealistic
in environments with some uncertainty and dynam-
icity. Robust plans are generated to handle, for ex-
ample, delays during execution (Atzmon et al., 2020)
or robust execution strategies are used (H
¨
onig et al.,
2016). While robust plans are less flexible and assume
the worst-case scenario, robust execution assumes ex-
plicit exchange of information between agents.
a
https://orcid.org/0009-0003-8765-5092
b
https://orcid.org/0000-0002-6717-8175
This paper presents a decentralized approach to
solving MAPF without explicit agent communication.
We use so-called social laws that prescribe or deny
specific actions based on the agent’s current local
neighborhood, which corresponds to the agent’s sen-
sor input. In particular, we propose a formal frame-
work to describe social rules for MAPF problems and
define a set of social laws for MAPF that prevent
the execution of any action that might cause a col-
lision. If no such law is applicable in the given sit-
uation (i.e., no possible collision), the agent follows
the shortest path to its destination. Both deterministic
and stochastic rules are proposed, where the stochas-
tic rules are intended to prevent deadlocks. The al-
gorithm works online; at each time step, each agent
decides on its next action. This online nature also
makes the method applicable to non-deterministic set-
tings where agents can experience delays.
The major contribution of the paper is bringing
the concept of social laws to multi-agent path find-
ing, which has not been done before. In particular, the
formal framework to specify social laws for MAPF is
suggested together with examples of two social laws,
one deterministic and one stochastic. The proposed
laws are empirically compared.
2 PROBLEM DEFINITION
A Multi-Agent Pathfinding problem with k agents is
a quadruple (G, k, s, g) where G = (V, E) is an undi-
rected graph, {1, . . . , k} the set of agents, s and g map-
Slezák, J., Mestek, J. and Barták, R.
Social Laws for Multi-Agent Pathfinding.
DOI: 10.5220/0013189200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 463-470
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
463

pings {1, . . . , k} 7→ V that assign to each agent i its
starting vertex s(i) and its destination (goal) g(i), re-
spectively.
Time is assumed to be discrete and, at each time
step, each agent is located on one of the vertices V .
Between two consecutive timesteps, each agent per-
forms exactly one action. An action is modeled as a
function a : V 7→ V where a(v) = v
′
means that if an
agent performs action a in the vertex v at time step t,
in the next time step t + 1 the agent will be in the ver-
tex v
′
. There are two types of actions: the wait action
means that the agent stays at its current vertex (v
′
= v),
and the move action means that the agent moves to an
adjacent vertex ((v, v
′
) ∈ E) (Stern et al., 2019).
For agent i and a sequence of actions π =
(a
1
, a
2
, . . . , a
n
), π
i
[t] denotes the location of the agent
after performing the first t actions of π, starting at its
starting vertex s(i). As we assume unit durations of
all actions, π
i
[t] represents the location of agent i at
the time step t. A sequence π is a single-agent plan
for agent i iff π
i
[|π|] = g(i), that is, the execution of
the actions starting at s(i) results in being at g(i).
A solution is a set of k single agent plans, one for
each agent. The task of MAPF is to find a valid solu-
tion, that is, a solution that does not contain any con-
flict (collisions during execution). In this paper, we
recognize three types of conflict:
• A vertex conflict between two agents i and j oc-
curs if both agents occupy the same vertex at the
same time step. Formally, there exists t such that
π
i
[t] = π
j
[t].
• An edge conflict between two agents i and j oc-
curs if both agents move along the same edge at
the same time. Formally, there exists t such that
π
i
[t] = π
j
[t] ∧π
i
[t + 1] = π
j
[t + 1]. Note that the
existence of an edge conflict implies the existence
of a vertex conflict; therefore, it is sufficient to
check only for vertex conflicts.
• A swapping conflict between two agents i and
j occurs if the agents move at the same time
along the same edge in opposite directions. For-
mally, there exists t such that π
i
[t] = π
j
[t + 1] ∧
π
i
[t + 1] = π
j
[t].
Target Behavior. We use the disappear at target as-
sumption – agent disappears upon reaching its desti-
nation. This means that the agent does not block other
agents after it reaches its destination.
Solution Cost. To measure the cost (“quality”) of
the solutions, we use the Sum of Cost (SoC) metric.
SoC of a given solution is defined as the sum of the
lengths of the single-agent plans.
3 RELATED WORK
MAPF has been extensively studied and many com-
plete optimal algorithms exist, e.g., Conflict-Based
Search (Sharon et al., 2015) and its improvements are
very popular. Such algorithms are inherently offline
and centralized, which limits their applicability in dy-
namic environments (e.g., where agents can get de-
layed) and scalability in number of agents. Decen-
tralized and on-line algorithms might be an answer to
those issues.
Priority Inheritance with Backtracking (PIBT)
(Okumura et al., 2019) is a complete, optionally de-
centralized, algorithm based on prioritized planning;
decentralized implementation requires local commu-
nication. In prioritized planning, priorities are as-
signed to agents and single-agent plans are computed
one by one (in the order given by agents’ priori-
ties) while avoiding collisions with already computed
plans. Note that priorities are usually artificially cho-
sen, just to specify the ordering of the agents. (Ma
et al., 2019) showed that static (a priory fixed) priori-
ties are not sufficient to achieve completeness. To re-
solve deadlocks and thus achieve completeness, PIBT
uses priority inheritance and backtracking which can
be seen as a form of search in the space of mappings
of agents to priorities and is being done at every time
step.
A different approach to the decentralized and on-
line solution of MAPF is reinforcement learning. The
PRIMAL algorithm (Sartoretti et al., 2019) learns a
policy that outputs an action for the agent based on its
current situation represented by the agent’s neighbor-
hood (10 × 10) and distance and direction to its goal.
In the Follower algorithm (Skrynnik et al., 2024) each
agent individually computes the shortest path to its
destination, and then the learned policy is used to fol-
low the path, ensuring collision avoidance by making
the necessary detours.
Social laws were introduced as a general concept
that guarantees successful co-existence of agents in
multi-agent environments by denying some actions
(Shoham and Tennenholtz, 1995). More formally, a
social law was defined as an ordered set of constraints
(a
i
, ϕ
i
) where (a
i
, ϕ
i
) means that action a
i
is not al-
lowed in states that satisfy condition ϕ
i
. The idea of
using social laws was later extended to multi-agent
planning setting MA-STRIPS where social laws mod-
ify the MA-STRIPS instances – for example, add or
remove actions, add or remove preconditions or ef-
fects, etc. (Karpas et al., 2017).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
464
4 SOCIAL LAWS FOR MAPF
We introduce social laws for MAPF as rules that pre-
scribe actions to execute based on the current situa-
tion in the local neighborhood of the agent. Contrary
to the original definition, we use the laws in an online
approach: each agent follows the shortest path to its
goal, and social laws are used only to resolve poten-
tial conflicts with other agents. However, we retain
the original idea of social laws as a method of achiev-
ing coordination without the need to negotiate (and
communicate explicitly).
4.1 Agent Neighborhood
Though graphs that define the environment of agents
could be arbitrary, the most common way is to use
grid-like graphs, where agents can move up, down,
left or right. We use this concept in our definition
of agent’s neighborhood as it allows the definition of
social laws and forbidden moves independently of the
particular vertex of the agent.
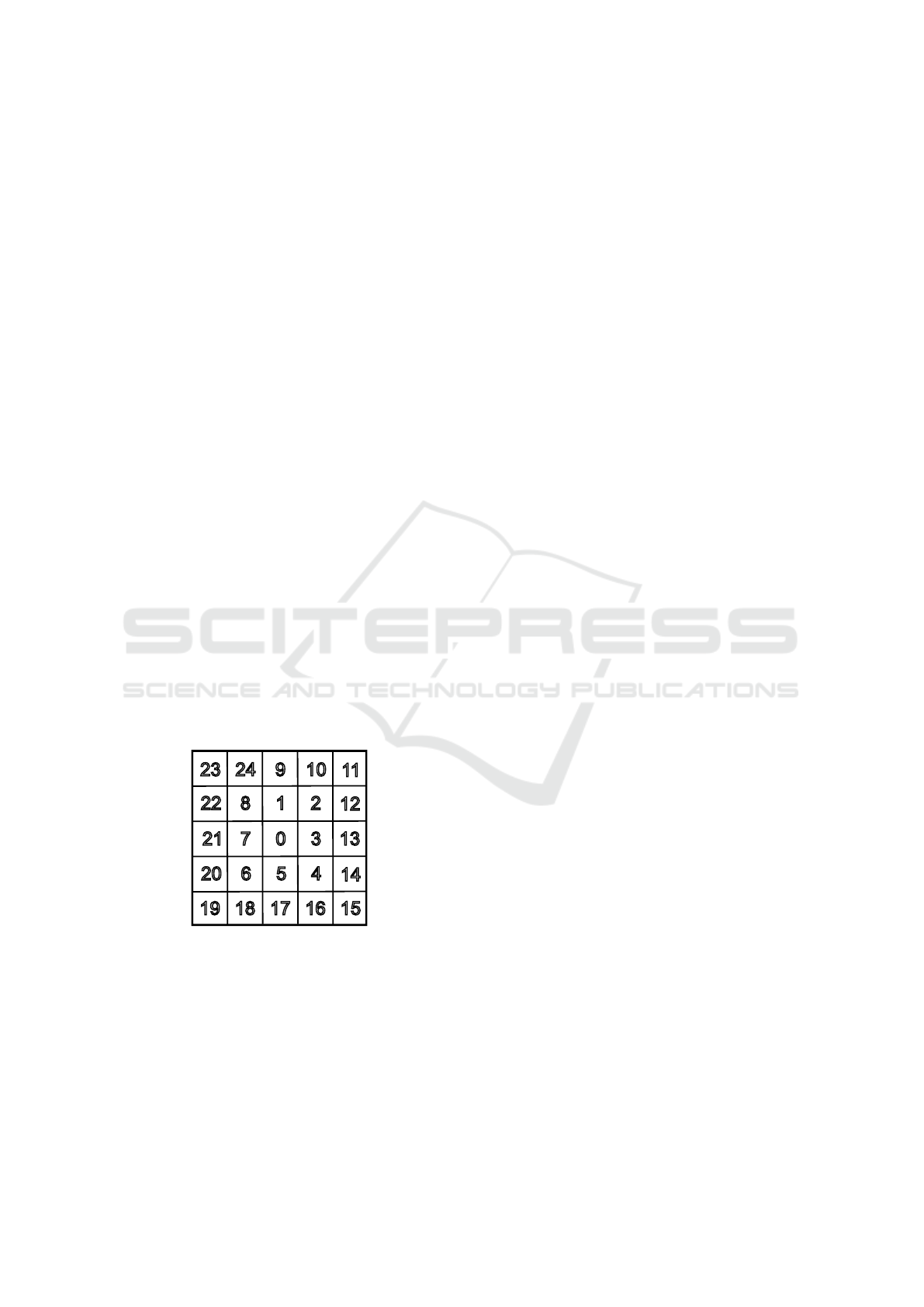
To describe the situation in a local neighborhood,
we index the vertices in the following way: The ver-
tex where the agent is currently located is marked by
0. The vertex to which the next planned action leads
(where the agent is headed) is marked by 1. Then,
we mark the rest of the 8-neighborhood of 0 by 2–
8, clockwise. Similarly, the next vertex in the direc-
tion of 1 is marked by 9, and the rest of the 5 × 5-
neighborhood by 10–24. The labeling is shown in
Figure 1. This allows us to describe a neighborhood
(visible area) of different sizes.
1 2822
12
9 102423
11
0 3721 13
5 4620
14
17 161819 15
Figure 1: Labeling of local neighborhood of an agent.
The situation in the neighborhood is then de-
scribed using the prepositions F = {0, . . . , 24} × S
where S = {A, N, O, P} is a status of the vertex:
A – occupied by an agent
N – not occupied by an agent (i.e. obstacle or free)
O – obstacle
P – passable (i.e. not obstacle)
A set of actions A = {S, F, R, L, B} is again relative
to location and the next planned action of the agent:
S – stay at 0
F – move forward in the planned direction, i.e., to 1
R – turn right, i.e., move to 3
L – turn left, i.e., move to 7
B – move back, i.e., to 5
A law P is a pair ⟨X , Y ⟩ where X ⊆ F are precon-
ditions of the law, and Y is a probabilistic distribution
of actions A (we allow laws with stochastic effects;
such laws are called stochastic laws). A law is ap-
plicable in the current situation of the agent if all its
preconditions are satisfied.
Social laws are a totally ordered set of such laws.
4.2 Usage of the Laws
Now, we describe how to use social laws to control the
agents. We consider a decentralized setting, meaning
that every agent is controlled by itself. We assume
that each agent knows the map and its current position
(so it can compute the shortest path to its destination),
and also knows the positions of agents within its local
neighborhood (sensor input).
In the beginning, the agent computes a shortest
path from its starting location to its destination and
follows the path. At each time step, the agent checks
all social laws in a given order. If there is an appli-
cable law, the first such law is applied, that is, the
agent performs the action suggested by the law. In
the case of stochastic laws, the action is sampled ran-
domly from the distribution. If the new location of the
agent is not on the original shortest path to the desti-
nation, the agent computes a new shortest path – from
the current location to the agent’s destination. During
shortest path computation, other agents are ignored
(not considered as obstacles), and hence possible con-
flicts with other agents are ignored.
If none of the laws are applicable, the agent con-
tinues to the next vertex on the shortest path.
Note that each agent acts independently based
solely on the situation (positions of other agents and
obstacles) in its neighborhood. The agent does not
consider other agent’s intentions or possible actions.
Hence, the computational complexity of determining
the next action for an agent is constant. In particu-
lar, it does not depend on the number of agents in the
environment.
4.3 Deterministic Laws
We now describe a basic system of social laws based
on the principle of “priority to the right.” In the defini-
Social Laws for Multi-Agent Pathfinding
465

1: (A1) (N3) (P3) (N4) (N13) > (R100)
2: (A1) (N5) (P5) (N6) (N17) > (B100)
3: (A1) > (S100)
4: (A2) (N3) (P3) (N4) (N13) > (R100)
5: (A2) (N5) (P5) (N6) (N17) > (B100)
6: (A2) > (S100)
7: (A9) (N3) (P3) (N4) (N13) > (R100)
8: (A9) (N5) (P5) (N6) (N17) > (B100)
9: (A9) > (S100)
10: (A10) (N3) (P3) (N4) (N13) > (R100)
11: (A12) (N3) (P3) (N4) (N13) > (R100)
12: (A3) (N5) (P5) (N6) (N17) > (B100)
13: (A11) (N3) (P3) (N4) (N13) > (R100)
14: (A13) (N5) (P5) (N6) (N17) > (B100)
Figure 2: Deterministic Social Laws (action selection has
probability 100%) – a complete system.
tions of the laws, we use the aforementioned relative
labeling of the vertices (Figure 1).
Do not Enter Occupied Vertex Law (NO). The
agent at 0 is not allowed to enter the planned vertex
1, if the vertex 1 is already occupied by another agent
(laws 1-3).
Priority to the Right Law (PR). The agent at 0 is
not allowed to enter the planned vertex 1 if there is
another agent at 2 (laws 4-6). Furthermore, to prevent
a collision at 1 with an agent incoming from the op-
posite direction (9), we also do not allow the agent to
enter 1 if there is an agent at 9 and no agent at 8.
We want to ensure that when the agent is not al-
lowed to enter its planned vertex (because of another
agent), it will try to “get around” the other agent.
Therefore, the agent first tries to move to the right (to
3). If not possible
1
(due to another agent or obstacle),
the agent tries to move back (to 5). Only if none of
the moves is possible, the agent stays at 0.
The complete system of above rules is listed in
Figure 2. We will refer to this system as Deterministic
Social Laws (DSL).
4.3.1 Properties
DSL ensures that no collisions occur during execu-
tion. Proof: The swapping conflict is denied by the
NO rule; the agent is not allowed to move towards
the vertex, which is occupied by another agent. Ver-
tex conflict is also denied, as NO does not allow an
agent to enter an already occupied vertex, and PR en-
sures that no two agents move to the same vertex at
the same time step.
1
Vacancy of the new location is not sufficient. The pos-
sible violation of PR or NO by the new action is checked as
well.
1
2
1
2
1
2
1
2
(a)
(b) (c) (d)
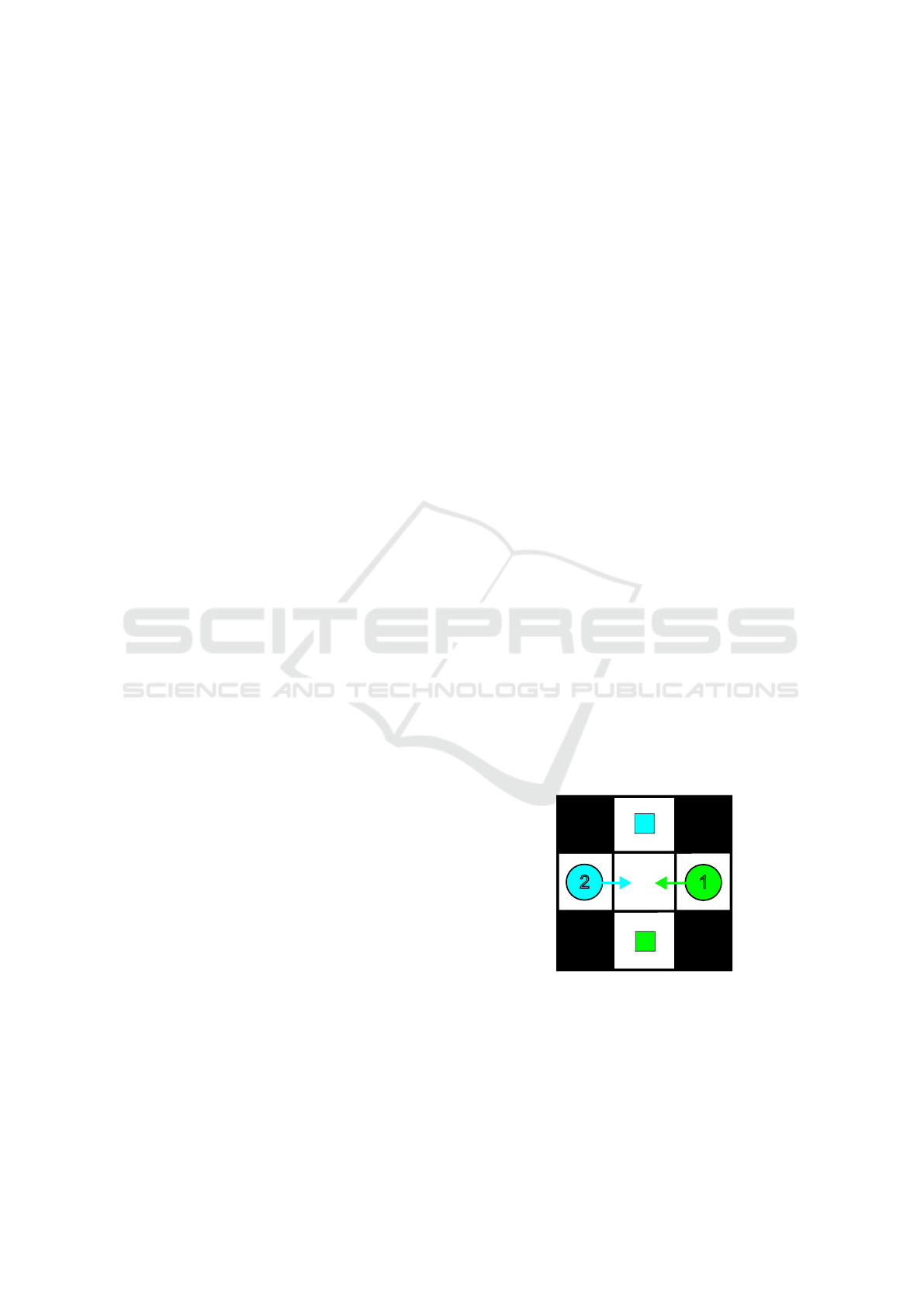
Figure 3: Deadlock situation and its possible resolution us-
ing stochastic rules. The current positions of agents are de-
picted by circles, their destinations by squares. Arrows de-
note agents’ planned actions.
DSL also ensures robustness against delays, as the
occupancy of the next vertex is checked in real-time.
On the other hand, DSL is prone to ending in a
deadlock, due to the symmetrical behavior of all in-
volved agents. An example of such a situation is
shown in Figures 3a, 3b. Using DSL, in situation (b),
the PR law is applicable to both agents, so they both
move right (relatively to their desired directions de-
picted by arrows). Therefore, at the next time step,
agents are again in situation (a).
As a solution to resolve such deadlocks, we
propose another system that uses stochastic laws.
Stochasticity breaks the symmetrical behavior of
agents.
4.4 Stochastic Laws
Stochastic laws are modifications of the deterministic
laws. The precondition part remains the same, while
the action part is modified such that instead of forc-
ing the agent to always move right (or back, respec-
tively), we set the agent to stay, with 50% probabil-
ity. This specific value maximizes the probability that
two agents choose different actions (in symmetric sit-
uations such as the one in Figure 3b).
To foster deadlock avoidance, we introduce an ex-
tended version of the priority to the right law.
Extended Priority to the Right Rule (EPR). In
addition to situations described in standard Priority to
the right: An agent in 0 is allowed to enter 1 when
there is an agent in 9 if there is an agent in 2, an ob-
stacle in 3 and no obstacle at 24. The agent in 0 is
also allowed to enter 1 when there are agents in all
neighbors of 1 (i.e., 9, 2, 8), an obstacle in 3 and no
obstacles in 3, 7, 24.
Furthermore, in addition to trying to move right
and back, the agent also tries to move left.
A complete system of Stochastic Social Laws
(SSL) is shown in Figure 4. It consists of stochastic
versions of the EPR and NO laws.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
466
1: (A1) (N3) (P3) (N4) (N13) > (R50) (S50)
2: (A1) (N5) (P5) (N6) (N17) > (B50) (S50)
3: (A1) (N7) (P7) (N8) (N21) > (L50) (S50)
4: (A1) (N3) (P3) (A2) (A13) (N4) > (R50) (S50)
5: (A1) (N3) (P3) (O5) (A13) (P12) (N4) > (R50) (S50)
6: (A1) (N3) (P3) (A2) (P1) (O5) (A13) (P12) (A4) (P14) > (R50) (S50)
7: (A1) (N5) (P5) (A4) (A17) (N6) > (B50) (S50)
8: (A1) (N5) (P5) (O7) (A17) (P16) (N6) > (B50) (S50)
9: (A1) (N5) (P5) (A4) (P3) (O7) (A17) (P16) (A6) (P18) > (B50) (S50)
10: (A1) > (S100)
11: (A2) (N3) (P3) (N4) (N13) > (R50) (S50)
12: (A2) (N5) (P5) (N6) (N17) > (B50) (S50)
13: (A2) (N7) (P7) (N8) (N21) > (L50) (S50)
14: (A2) (N1) (P1) (A8) (P7) (O3) (A9) (P24) (A2) (P10) > (F50) (S50)
15: (A2) (N3) (P3) (A2) (A13) (N4) > (R50) (S50)
16: (A2) (N3) (P3) (O5) (A13) (P12) (N4) > (R50) (S50)
17: (A2) (N3) (P3) (A2) (P1) (O5) (A13) (P12) (A4) (P14) > (R50) (S50)
18: (A2) (N5) (P5) (A4) (A17) (N6) > (B50) (S50)
19: (A2) (N5) (P5) (O7) (A17) (P16) (N6) > (B50) (S50)
20: (A2) (N5) (P5) (A4) (P3) (O7) (A17) (P16) (A6) (P18) > (B50) (S50)
21: (A2) > (S100)
22: (A9) (N3) (P3) (N4) (N13) > (R50) (S50)
23: (A9) (N5) (P5) (N6) (N17) > (B50) (S50)
24: (A9) (N7) (P7) (N8) (N21) > (L50) (S50)
25: (A9) (N1) (P1) (A8) (A9) (N2) > (F50) (S50)
26: (A9) (N1) (P1) (O3) (A9) (P24) (N2) > (F50) (S50)
27: (A9) (N3) (P3) (A2) (A13) (N4) > (R50) (S50)
28: (A9) (N3) (P3) (O5) (A13) (P12) (N4) > (R50) (S50)
29: (A9) (N3) (P3) (A2) (P1) (O5) (A13) (P12) (A4) (P14) > (R50) (S50)
30: (A9) (N5) (P5) (A4) (A17) (N6) > (B50) (S50)
31: (A9) (N5) (P5) (O7) (A17) (P16) (N6) > (B50) (S50)
32: (A9) (N5) (P5) (A4) (P3) (O7) (A17) (P16) (A6) (P18) > (B50) (S50)
33: (A9) > (S100)
34: (A8) (O7) (O2) (O9) (P3) (N3) (N4) (N13) > (R50) (S50)
35: (A8) (O7) (O2) (O9) (P5) (N5) (N6) (N17) > (B50) (S50)
36: (A10) (N3) (P3) (N4) (N13) (P2) > (R50) (S50)
37: (A12) (N3) (P3) (N4) (N13) (P2) > (R50) (S50)
38: (A3) (N5) (P5) (N6) (N17) > (B50) (S50)
Figure 4: Stochastic Social Laws – a complete system.
4.4.1 Properties
Similarly to PR, EPR does not allow two agents to
move simultaneously to the same vertex. Therefore,
SSL also ensures that no collisions occur during exe-
cution, as well as robustness against delays.
SSL is much less prone to deadlocks. For exam-
ple, the situation in Figure 3 is solvable using SSL be-
cause with probability 50%, exactly one of the agents
stays and the other moves right, leading to a situation
(c) (or symmetric where the blue agent stayed and the
green agent moved). The agents can then proceed to
situation (d) and continue to their destinations. Note
that, due to stochasticity, with a probability 50% ei-
ther both or none of the agents move. That would
lead to repeating one of the situations (a) or (b), thus
just needing another attempt to solve the situation.
However, there are still some instances that can-
not be solved using SSL (or DSL); one such situa-
tion is shown in Figure 5. To solve such instances
by stochastic rules, adding (unique) priorities to the
agents or involving some form of communication is
the way to handle the situation.
1
2
Figure 5: Situation not solvable by social laws.
5 EMPIRICAL EVALUATION
We evaluated our proposed method on maps and sce-
narios from the standard MAPF benchmark (Stern
et al., 2019). We compare the results of our
Social Laws for Multi-Agent Pathfinding
467

method with optimal solutions for given instances
from MAPF Progress Tracker (Shen et al., 2023) and
with the decentralized ML-based algorithm Follower
(Skrynnik et al., 2024).
5.1 Comparison of DSL and SSL
Firstly, we experimentally compare the performance
of the two proposed social law systems, namely DSL
and SSL, on the empty grid of size 32 × 32 with var-
ious numbers of agents. Success rates are shown in
Table 1. The results clearly indicate that the basic sys-
tem of deterministic laws (DSL) is prone to ending in
a deadlock. In contrast, using stochastic laws (SSL),
we were able to solve all instances.
Comparison of the costs (Table 2) shows that SSL
are better even in terms of the costs of the solutions.
Therefore, in next experiments, we will use the SSL
law only.
Table 1: DSL and SSL success rates on map empty-32-32.
DSL SSL
Agents
Success Rate Success Rate
10 1,00 1,00
20 0,96 1,00
30 0,92 1,00
40 0,84 1,00
50 0,84 1,00
Table 2: DSL and SSL plan costs on map empty-32-32.
DSL SSL
Agents
Average SoC Average Soc
10 227,20 225,40
20 501,38 490,04
30 836,61 806,96
40 1204,00 1155,10
50 1670,57 1580,86
5.2 Performance
We evaluated SSL on several maps and numbers of
agents; for every such pair, we present average val-
ues over the 25 random scenarios from MAPF Bench-
mark. We report the SoC of SSL, the ratio of that SoC
compared to the SoC of the optimal solution (from
(Shen et al., 2023)), and the number of applied so-
cial laws and the number of replannings. Note that
replanning occurs when an action different from stay
or move forward is enforced by a social rule. In such
a case, a new path for a single agent is sought.
Tables 3 and 4 show the performance of SSL on
the empty grid 32 × 32 and the grid with 20% ran-
dom generated obstacles, respectively. On the map
with obstacles, the average number of applications of
a social rule is significantly higher which means more
interactions between agents. This fact is expected and
is probably the main explanation for the increase in
the ratio to optimal costs.
The other two sets of experiments were performed
on maps inspired by a warehouse layout. Table 5
shows the results on the warehouse map with corri-
dors of width 1. Although SSL is able to solve such
instances, the costs of the solutions are several times
worse than the optimum. In contrast, on a similar map
but with corridors of width 2 (so that agents can pass
each other), SSL is quite competitive, even for many
agents (900). The results of such maps are shown in
Table 6.
The Follower algorithm achieved almost optimal
performance on most of the maps (except the ware-
house with narrow corridors), thus being much better
than our approach. However, the Follower uses the lo-
cal neighborhood of size 10×10 which is much larger
than ours (5 × 5). This opens an interesting option for
future research, the construction of social laws that
use a larger neighborhood. Furthermore, in our ap-
proach, the laws are formally defined and verifiable.
6 CONCLUSION
In this paper, we introduce the idea of solving the
MAPF using social laws. This approach is decen-
tralized; we assume that each agent knows only the
map (to compute the shortest path to its goal) and po-
sitions of agents (and obstacles) in its local neighbor-
hood. We do not assume any communication between
agents. We proposed a framework to describe social
laws in this setting formally.
In the framework, we designed two systems of
laws, Deterministic Social Laws (DSL) and Stochas-
tic Social Laws (SSL). Due to the symmetric behavior
of agents, the Deterministic Social Laws can easily
end up in a deadlock, which was shown both theoret-
ically and experimentally. To combat the symmetric-
ity, we designed Stochastic Social Laws – stochastic-
ity makes it possible for two agents in symmetric sit-
uations to perform different actions.
The Stochastic Social Laws were experimentally
evaluated on four maps (grid with and without obsta-
cles, warehouse with narrow and wide corridors) from
the standard MAPF Benchmark. We found that SSL
solved all the tested instances. Regarding the cost of
the solutions, we compare the SSL solutions to the op-
timal solutions. With an increasing number of agents,
the ratio of costs increases significantly. We found
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
468
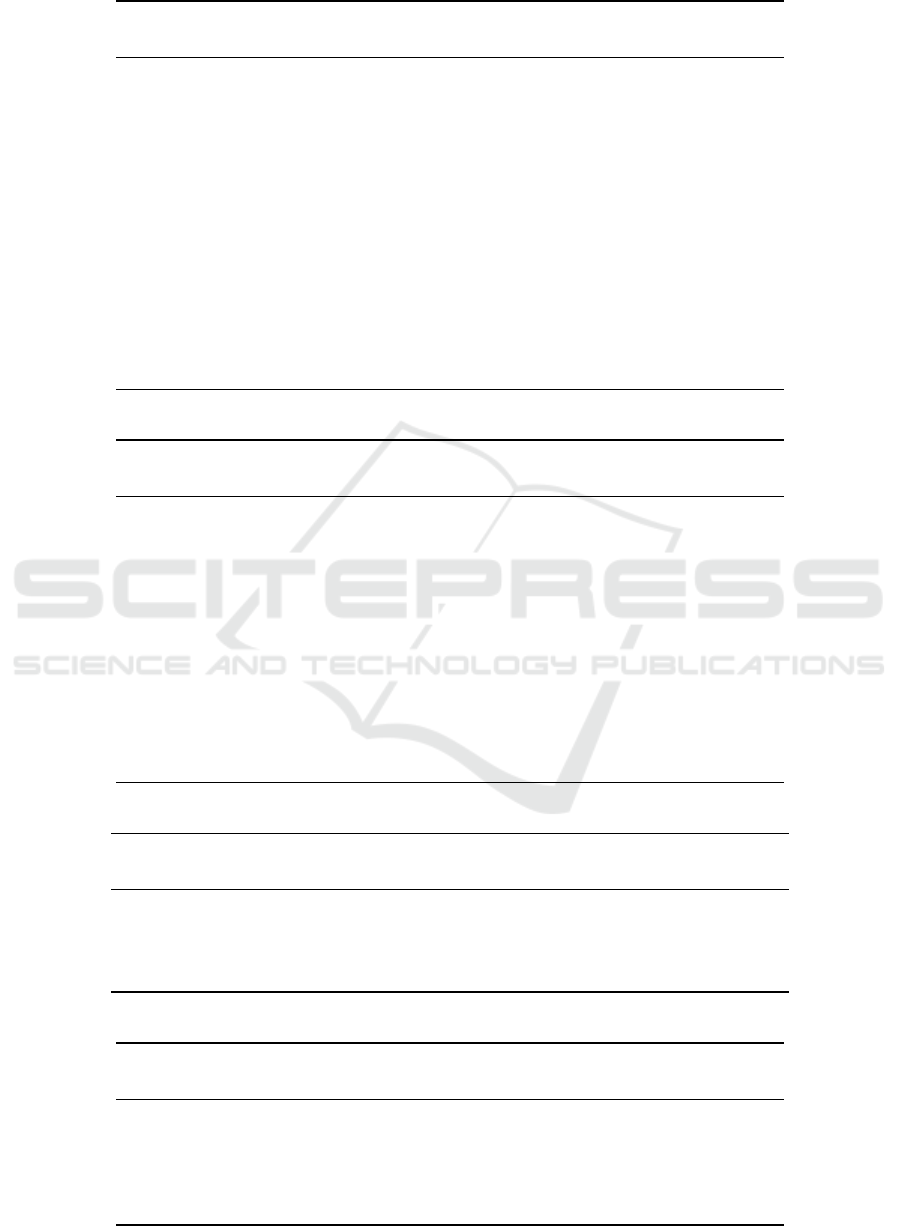
Table 3: Performance of SSL on empty-32-32.
Average Average Average Follower
Agents
SoC
Rating
Replans Social Laws SoC
10 225,40 1,06 5,68 11,36 212,92
20 490,84 1,14 26,72 53,48 435,84
30 809,96 1,25 72,68 145,44 663,16
40 1150,84 1,35 131,42 263,20 881,72
50 1563,28 1,45 214,78 430,56 1119,60
100 4576,52 2,12 1050,12 2119,96 2356,80
150 10832,28 3,33 3146,86 6513,24 3739,84
200 20312,32 4,67 6376,32 13693,24 5274,64
250 34772,24 6,31 11286,74 25209,52 7025,24
300 58683,04 8,62 18980,60 45131,76 9048,12
350 98451,84 11,78 30708,02 79629,48 11444,28
400 157456,72 15,49 46115,18 132260,80 14464,08
450 249707,72 19,83 67320,46 216599,68 18390,32
500 417161,20 27,11 98268,34 373848,56 23259,44
Table 4: Performance of SSL on random-32-32-20.
Average Average Average Follower
Agents
SoC
Rating
Replans Social Laws SoC
10 255,20 1,13 11,62 23,48 230,68
20 570,40 1,27 46,52 94,96 465,68
30 930,20 1,37 98,30 201,56 713,96
40 1420,40 1,55 195,60 407,40 974,80
50 1914,24 1,68 300,72 629,84 1228,84
100 6280,44 2,70 1467,68 3220,48 2688,96
150 15293,24 4,15 4094,02 9614,96 4656,68
200 30665,00 5,86 8491,00 21399,56 7036,60
250 60069,28 8,41 16193,18 45476,52 10268,72
300 102401,64 10,16 25909,70 81746,28 14816,24
350 167805,00 12,36 38806,82 140010,88 21043,16
400 266375,96 9,08 56306,98 229531,80 29262,08
Table 5: Performance of SSL on warehouse-10-20-10-2-1.
Average Average Average Follower
Agents
SoC
Rating
Replans Social Laws SoC
100 15374,04 1,77 2063,16 4739,56 9238,88
300 80707,00 3,28 15889,56 42504,00 27777,36
500 334662,00 7,56 70588,92 234236,72 50819,96
700 1132945,00 16,30 229907,68 887009,12 79063,20
Table 6: Performance of SSL on warehouse-10-20-10-2-2.
Average Average Average Follower
Agents
SoC
Rating
Replans Social Laws SoC
100 9687,16 1,05 196,08 392,48 9378,24
300 30556,84 1,17 1812,96 3648,80 27218,48
500 60630,80 1,39 6879,74 14082,16 46193,84
700 105976,56 1,67 17222,98 36080,16 66994,08
900 171310,44 1,94 34574,56 74768,84 88691,64
Social Laws for Multi-Agent Pathfinding
469

that social rules work well on maps where agents are
able to easily avoid each other (such as warehouses
with wide corridors).
Our work opens several directions for future re-
search. We limited our research only to laws inspired
by the priority to the right rule that is used in real-
world traffic rules. However, systems based on dif-
ferent rules might be more efficient or even needed if
human agents are assumed.
We showed an example of an instance that is not
solvable using social laws (in our current setting).
Some extensions to the setting, such as adding priori-
ties to the agent, would not only make such instances
solvable, but it might also be useful for decreasing the
cost of solutions produced by social laws.
ACKNOWLEDGEMENTS
Research is supported by the project 23-05104S of
the Czech Science Foundation. Jakub Mestek is
supported by Grant Agency of Charles University
(project GAUK No. 36124). Computational re-
sources were provided by the e-INFRA CZ project
(ID:90254), supported by the Ministry of Education,
Youth, and Sports of the Czech Republic.
REFERENCES
Atzmon, D., Stern, R., Felner, A., Wagner, G., Bart
´
ak, R.,
and Zhou, N. (2020). Robust multi-agent path finding
and executing. J. Artif. Intell. Res., 67:549–579.
H
¨
onig, W., Kumar, T. K. S., Cohen, L., Ma, H., Xu, H., Aya-
nian, N., and Koenig, S. (2016). Multi-agent path find-
ing with kinematic constraints. In Coles, A. J., Coles,
A., Edelkamp, S., Magazzeni, D., and Sanner, S., ed-
itors, Proceedings of the Twenty-Sixth International
Conference on Automated Planning and Scheduling,
ICAPS 2016, pages 477–485. AAAI Press.
Karpas, E., Shleyfman, A., and Tennenholtz, M. (2017).
Automated verification of social law robustness in
STRIPS. In Proceedings of the International Confer-
ence on Automated Planning and Scheduling, ICAPS
2017, volume 27, pages 163–171.
Ma, H., Harabor, D., Stuckey, P. J., Li, J., and Koenig,
S. (2019). Searching with consistent prioritization
for Multi-Agent Path Finding. In Proceedings of
the AAAI Conference on Artificial Intelligence, vol-
ume 33, pages 7643–7650.
Okumura, K., Machida, M., D
´
efago, X., and Tamura, Y.
(2019). Priority Inheritance with Backtracking for
Iterative Multi-agent Path Finding. In Proceedings
of the Twenty-Eighth International Joint Conference
on Artificial Intelligence, IJCAI-19, pages 535–542.
International Joint Conferences on Artificial Intelli-
gence Organization.
Sartoretti, G., Kerr, J., Shi, Y., Wagner, G., Kumar, T.
K. S., Koenig, S., and Choset, H. (2019). PRIMAL:
Pathfinding via reinforcement and imitation multi-
agent learning. IEEE Robotics and Automation Let-
ters, 4(3):2378–2385.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2015). Conflict-based search for optimal Multi-agent
Pathfinding. Artificial Intelligence, 219:40–66.
Shen, B., Chen, Z., Cheema, M. A., Harabor, D. D., and
Stuckey, P. J. (2023). Tracking progress in multi-agent
path finding. arXiv:2305.08446 [cs.AI].
Shoham, Y. and Tennenholtz, M. (1995). On social laws
for artificial agent societies: off-line design. Artificial
Intelligence, 73(1):231–252. Computational Research
on Interaction and Agency, Part 2.
Skrynnik, A., Andreychuk, A., Nesterova, M., Yakovlev,
K., and Panov, A. (2024). Learn to Follow: Decentral-
ized Lifelong Multi-Agent Pathfinding via planning
and learning. In Proceedings of the AAAI Conference
on Artificial Intelligence, volume 38, pages 17541–
17549.
Stern, R., Sturtevant, N., Felner, A., Koenig, S., Ma,
H., Walker, T., Li, J., Atzmon, D., Cohen, L., Ku-
mar, T. K. S., Boyarski, E., and Bart
´
ak, R. (2019).
Multi-Agent Pathfinding: Definitions, Variants, and
Benchmarks. In Symposium on Combinatorial Search
(SoCS), pages 151–158.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
470
