
Hierarchically Gated Experts for Efficient Online Continual Learning
Kevin Luong
a
and Michael Thielscher
b
The University of New South Wales, Sydney, Australia
Keywords:
Neural Networks, Machine Learning, Continual Learning, Mixture-of-Experts.
Abstract:
Continual Learning models aim to learn a set of tasks under the constraint that the tasks arrive sequentially
with no way to access data from previous tasks. The Online Continual Learning framework poses a further
challenge where the tasks are unknown and instead the data arrives as a single stream. Building on existing
work, we propose a method for identifying these underlying tasks: the Gated Experts (GE) algorithm, where a
dynamically growing set of experts allows for new knowledge to be acquired without catastrophic forgetting.
Furthermore, we extend GE to Hierarchically Gated Experts (HGE), a method which is able to efficiently
select the best expert for each data sample by organising the experts into a hierarchical structure. On standard
Continual Learning benchmarks, GE and HGE are able to achieve results comparable with current methods,
with HGE doing so more efficiently.
1 INTRODUCTION
Continual Learning, also known as Lifelong Learn-
ing, addresses the challenge of creating AI able to
continually learn and apply knowledge over long time
spans (Parisi et al., 2018). The biggest barrier to
achieving such an AI is catastrophic forgetting, where
previously learnt knowledge is lost due to interference
when acquiring new knowledge. In practice, this is
observed as a reduction in performance on existing
tasks when learning a new task.
In Continual Learning an agent is restricted from
seeing past data samples yet must correctly model
both past and present data. Whilst past data samples
are always forbidden, in many continual learning set-
tings the data is assumed to come from a series of sep-
arate distributions (tasks) with each sample labelled
according to its distribution (Kirkpatrick et al., 2017;
Lopez-Paz and Ranzato, 2017). This task identity
data is not available in the Online Continual Learning
setting, which is currently gaining attention as a more
useful extension to Continual Learning (Kirichenko
et al., 2021; Hihn and Braun, 2023).
Many Continual Learning techniques in both on-
line and offline settings aim to mitigate interference
between tasks, and thus catastrophic forgetting, by
employing a set of experts such that each expert is as-
sociated with a single task (Aljundi et al., 2017; Zhu
a
https://orcid.org/0009-0007-3362-9082
b
https://orcid.org/0000-0003-0885-2702
et al., 2022). The challenge, in online settings, is then
in selecting the correct expert during both training and
testing. We build on existing work in this area to pro-
pose our own method, which we name Gated Experts
(GE). More specifically, our algorithm can be seen as
an extension of Expert Gate (Aljundi et al., 2017) to
the online setting by detecting task switches as statis-
tically significant deviations in the training loss. We
credit Zhu et al. (2022) for the idea to use the train-
ing loss as a task switch signal. However, we track
the loss and detect task switches in a different man-
ner to address shortcomings in the existing approach,
discussed in section 3.3.
The GE algorithm belongs to the class of
expansion-based methods, where the number of pa-
rameters dynamically grows as needed to learn new
tasks. In this area, the efficiency of an algorithm is
often optimised by reducing the number of parame-
ters, by pruning (Zhu et al., 2022) or other methods
(Yoon et al., 2018; Xu and Zhu, 2018). We instead
propose to organise the experts in a hierarchical man-
ner, so that only a subset of experts are required for
any given data sample. Thus, the inference time can
be improved. We name this extension Hierarchically
Gated Experts (HGE).
We evaluate GE on standard Continual Learning
benchmarks and show that it is competitive with the
state-of-the-art in Online Continual Learning. Then,
we create new Continual Learning scenarios involv-
ing a mixture of datasets to which we apply both GE
Luong, K. and Thielscher, M.
Hierarchically Gated Experts for Efficient Online Continual Learning.
DOI: 10.5220/0013190000003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 507-518
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
507

and HGE. We show that HGE is able to organise ex-
perts hierarchically, thus increasing efficiency, with
little loss in accuracy.
In summary, our contributions are:
• We present a novel method for task switch de-
tection to address shortcomings in an existing ap-
proach.
• We apply this method on existing work to pro-
pose the GE algorithm and empirically show it to
be competitive with the state-of-the-art in Online
Continual Learning.
• We propose hierarchical organisation, unexplored
in the literature thus far, as a means of improv-
ing the efficiency of expansion-based Continual
Learning methods. Our HGE extension improves
upon the efficiency of GE. We demonstrate the ex-
tension on bigger Continual Learning scenarios as
a proof-of-concept.
The rest of the paper is structured as follows. We
provide an overview of Continual Learning and cur-
rent methods in Section 2. Then, we present our ap-
proach to task switch detection and the GE algorithm
in section 3, and describe the HGE extension in sec-
tion 4. Our experimental setup and results are given
in Section 5, and we conclude with a summary and
discussion of future work in Section 6.
2 BACKGROUND
2.1 Continual Learning
There has been a wide array of approaches proposed
for continual learning. We provide a broad overview
of the continual learning landscape, but refer to sur-
veys for a taxonomy as well as a more comprehen-
sive coverage of these approaches (Parisi et al., 2018;
Wang et al., 2024). There exists three major cate-
gories of continual learning methods: architectural,
regularisation, and replay-based.
Architectural Approaches: aim to assign specific
model parameters to specific tasks, thus mitigating
catastrophic forgetting as each parameter is only fit-
ted to one task. Often, there is a separate model, re-
ferred to as an expert, that is assigned to each task
to be learnt (Zhu et al., 2022; Lee et al., 2020). The
Expert gate (Aljundi et al., 2017) algorithm creates
a new expert for each task during training, as well
as an autoencoder to learn a representation for the
task. During test time, each sample is forwarded to
the expert corresponding to the autoencoder that best
recreates the sample. Alternatively, there exist ap-
proaches where the network is fixed but binary masks
are learned to restrict each task to a subset of param-
eters (Kang et al., 2022; Wortsman et al., 2020). In
some cases, the task-specific parameters may not be
stored and instead generated by a meta-model known
as a hypernetwork (HN) (Hemati et al., 2023).
Regularisation Techniques: constrain updates to
previous parameters to preserve learnt knowledge. In
many popular approaches, including Elastic Weight
Consolidation (Kirkpatrick et al., 2017), Gradient
Episodic Memory (Lopez-Paz and Ranzato, 2017)
and Synaptic Intelligence (Zenke et al., 2017), this is
achieved by applying a loss to penalise changes to pa-
rameters considered to be important. Learning with-
out Forgetting (Li and Hoiem, 2017) is another pop-
ular regularisation technique which records a model’s
output on new data and uses this as a pseudo-label to
preserve the model’s capabilities.
Replay-Based Approaches: involve saving and re-
training on previously seen data. Generally, it is as-
sumed that only a small subset of training samples
can be stored, in which case the main challenge is in
selecting the best samples to store (Chaudhry et al.,
2019; Lopez-Paz and Ranzato, 2017). Other works
in this area do not explicitly store the samples, but
instead train a network to recreate them (Shin et al.,
2017). Replay is commonly incorporated into contin-
ual learning algorithms, even if the works themselves
are focused on other aspects (Zhu et al., 2022; Hihn
and Braun, 2023; Kirichenko et al., 2021).
Continual learning scenarios are often categorised
as either domain incremental or class incremental
(Wang et al., 2024), although other categories exist.
In the domain incremental setting, the inputs for each
task come from a different distribution and the output
space is shared. In the class incremental setting, the
inputs come from the same distribution and the output
space is disjoint.
2.2 Online Continual Learning Methods
In Online Continual Learning, also known as Task-
Free or Task-Agnostic Continual Learning, task iden-
tities are not provided during training nor testing.
1
We
provide an overview of some of the main approaches
proposed in this area, which we will also use to com-
pare with our method.
Bayesian Gradient Descent (BGD) is an early
work in the Online Continual Learning setting (Zeno
et al., 2018). The authors build on previous work
in online variational Bayesian learning to propose a
1
Online Continual Learning may also refer to scenar-
ios where each training sample is only shown once, i.e. one
epoch per task (Wang et al., 2024). We do not consider this
case and only focus on learning without task identities.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
508

closed-form update rule for the mean and variance of
each parameter. Catastrophic forgetting is naturally
mitigated as the posterior distribution of parameters,
which captures all currently learnt knowledge, is used
as the prior in the next training step.
Lee et al. (2020) formulate the Continual Learn-
ing problem as a stream of data from a mixture dis-
tribution and propose the Continual Neural Dirichlet
Process Mixture (CN-DPM) algorithm where a set of
experts, each containing a discriminative and a gen-
erative component, models the overall mixture distri-
bution. In CN-DPM, new experts are added in a prin-
cipled manner using Sequential Variational Approxi-
mation (Lin, 2013).
The Hybrid generative-discriminative approach
to Continual Learning for classification (HCL)
(Kirichenko et al., 2021) jointly models the distribu-
tion of the input data and labels for each task using a
normalising flow. Three model statistics are tracked
for each existing task and a task switch is detected if
all three statistics lie outside the normal range. To
prevent catastrophic forgetting, the authors propose
using generative replay as well as a novel functional
regularisation loss to enforce similar mappings to a
snapshot taken on task switch.
In Task-Agnostic continual learning using Multi-
ple Experts (TAME) (Zhu et al., 2022), a set of ex-
perts is maintained where each is associated with a
training task. Task switches are detected using a sta-
tistically significant deviation in the training loss, at
which point a new expert is created. Each expert also
maintains a small buffer of training samples, which
are used to prune experts as well as train a selector
network to choose the correct expert during test time.
Hierarchical Variational Continual Learning
(HVCL) (Hihn and Braun, 2023) extends VCL
(Nguyen et al., 2018) to the task-agnostic setting
using the Sparsely Gated Mixture-of-Experts layer
(Shazeer et al., 2017). Dynamic path selection
through the HVCL model effectively produces
distinct experts to solve different tasks. The authors
introduce novel diversity objectives to better allo-
cate experts to tasks, thus mitigating catastrophic
forgetting.
Sparse neural Networks for Continual Learning
(SNCL) (Yan et al., 2022) is a method that com-
bines sparse networks, where unused parameters are
reserved for future tasks, with a novel experience re-
play approach where the intermediate network activa-
tions are stored in addition to the sample. The sparsity
is enforced by a variational Bayesian prior applied to
the activation of each neuron. The proposed experi-
ence replay approach, named Full Experience Replay,
allows for the priors to be more effectively optimised.
Finally, in Dynamically Expandable Representa-
tion (DER) (Yan et al., 2021), a super-feature extrac-
tor is repeatedly expanded to accommodate new data.
Catastrophic forgetting is mitigated as the older pa-
rameters are frozen, whilst pruning reduces redun-
dancy in the added parameters. As the super-feature
extractor is expanded, the classifier is continually
finetuned using experience replay.
3 ONLINE CONTINUAL
LEARNING
In the Online Continual Learning paradigm, training
data D
train
= {(x
i
,y
i
)}
N
i=1
in the form of input-output
pairs arrives sequentially such that when (x
i
,y
i
) is
seen, {(x
j
,y
j
)}
i−1
j=1
cannot be accessed. The goal is
to learn a model f of inputs to outputs with no infor-
mation given about the data generating process. Fol-
lowing training, the model is judged on testing data
D
test
= {(x
i
,y
i
)}
M
i=1
by comparing the expected (y
i
)
and model ( f (x
i
)) outputs.
We follow the common assumption (Hihn and
Braun, 2023; Kirichenko et al., 2021) that there exists
a set of distributions (tasks) from which the data is
generated and that they arrive in a sequence (possibly
with repetitions) with a hard boundary between each
task. Formally, there exists a constant C such that if
(x
i
,y
i
) belongs to task m and (x
i+1
,y
i+1
) belongs to
task m+1, then {(x
j
,y
j
)}
i+C
j=i+1
belongs to task m+1.
At a hard task boundary a large and sustained in-
crease in the training loss can be expected. Task-
Agnostic continual learning using Multiple Experts
(TAME) (Zhu et al., 2022) (cf. Section 2.2) is a
method for detecting these boundaries by tracking the
loss of a single active expert on incoming samples.
A threshold for acceptable losses is calculated using
the mean and standard deviation of the loss over a
moving window. When the incoming loss, which is
smoothed using an exponentially weighted moving av-
erage (EWMA), exceeds this threshold, a task switch
is detected. The active expert is then switched to the
correct expert or to a new expert if the incoming task
is unseen.
In this section, we propose a method for On-
line Continual Learning that, like TAME, leverages
statistically significant increases in the training loss
to detect task switches. First we describe our ap-
proach to task switch detection (Section 3.1). Then
we show how this can be applied to extend the Expert
Gate algorithm (Aljundi et al., 2017) to produce our
Gated Experts (GE) algorithm (Section 3.2). We also
provide a comparison between TAME and GE (Sec-
tion 3.3).
Hierarchically Gated Experts for Efficient Online Continual Learning
509

3.1 Detecting Task Switches in Online
Continual Learning
Given an expert and an input sample, we must deter-
mine if the sample belongs to the same task on which
the expert was trained. To do so, for each expert we
maintain an EWMA of the value and deviation of the
training loss. Given n training losses L, the mean µ
and standard deviation σ are defined as follows:
µ
1
← L
1
µ
n
← α µ
n−1
+ (1 −α)L
n
,n > 1
σ
1
← 0
σ
2
← L
2
−L
1
σ
n
← α σ
n−1
+ (1 −α)(L
n
−µ
n−1
),n > 2
α is the smoothing factor for the EWMA and should
be set relatively high (we use α = 0.9) to reduce the
impact of noise in the training loss. The mean and
standard deviation of the training loss are combined
with a threshold hyperparameter ε to produce an up-
per bound on the training loss:
µ + εσ
If the loss of the given input sample is above this up-
per bound, we assume one of three possibilities:
1. The sample belongs to the same task as the expert
but is an outlier.
2. The sample belongs to another task.
3. The sample belongs to the same task as the ex-
pert but instability in the training process has tem-
porarily increased the loss.
To determine which of these is correct, we set aside
the input sample in a buffer (the high-loss buffer) and
await further samples. If the training loss immediately
returns below the threshold, the first scenario has oc-
curred as the other two can be ruled out.
It is clear that the second scenario will result in a
consistently high training loss, and we also expect to
see this trend in the third scenario; if training insta-
bility has left the expert in a state where it produces
high training losses, setting aside the input samples
prevents the expert from exiting such a state. Thus, if
a consistently high training loss is observed, we must
determine if the second or third scenario has occurred.
The second and third scenarios can be differenti-
ated with the aid of a small buffer of samples on which
the expert was trained. Samples from this buffer are
compared to the high-loss samples in a statistical test
to determine if they belong to the same distribution.
First, the training loss is calculated for all samples.
We hypothesise that the loss is normally distributed
because in practice, each loss is the mean over a batch
of training examples and as a result the Central Limit
Theorem can be applied. Thus, we apply a simple Z-
test: Let µ
1
and σ be the mean and standard deviation
of the n losses from the samples in the expert buffer,
and µ
2
be the mean of the losses from the high-loss
buffer, then the standard error SE and Z-score ZS are
calculated as:
SE = σ/
√
n
ZS = |µ
2
−µ
1
|/SE
If ZS is above a threshold hyperparameter ε
review
, then
we assume scenario 2 has occurred, and scenario 3
otherwise.
3.2 Gated Experts
Detecting switches in the input task allows for the Ex-
pert Gate algorithm (Aljundi et al., 2017) to be ex-
tended to the Online Continual Learning setting. We
name this extension Gated Experts (GE) and provide
the pseudocode in Algorithm 1. In GE, a set of ex-
perts (initially one) is maintained with each expert
corresponding to a single task out of all tasks seen
so far. Associated with each expert is an autoencoder
that is trained on the same data. As each training sam-
ple arrives, it is forwarded to the most relevant expert
defined by the lowest autoencoding loss. Thus, task
switches between existing tasks are handled. When
a task switch is detected, we can assume that the in-
coming task is new and thus create a new expert.
When a new expert is created, it is likely that fu-
ture samples from the same task will not be correctly
forwarded to said expert until the associated autoen-
coder is adequately trained. GE addresses this prob-
lem by maintaining a separate set of newly created
experts. When a sample is forwarded to an expert and
found to not belong to said expert, we check if it be-
longs to a newly created expert before setting it aside.
Thus, the following events will occur when samples
from a new task arrive:
1. The samples are forwarded to one or more exist-
ing experts, found to have a high loss and thus set
aside in the high-loss buffer.
2. A task switch is detected due to a consistently
high loss, and a new expert is created and trained
on the samples in the high-loss buffer.
3. Further samples from the new task arrive and are
forwarded to the same experts as in Step 1.
4. The samples are redirected to the new expert
rather than sent to the high-loss buffer.
During the final step, we also track whether the
loss of the sample on the new expert was greater or
lower than on the existing expert. When the loss on
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
510

Data: (x
i
,y
i
) = the incoming training sample
E = the set of existing experts
E
new
= the set of newly created experts
R = a buffer to store recent samples
append (x
i
,y
i
) to R
e
best
← GE forward(E, (x
i
,y
i
)) // returns the
expert with lowest autoencoding loss
if Loss(e
best
, (x
i
,y
i
)) > e
best
.threshold then
if there exists e
new
in E
new
such that
Loss(e
new
, (x
i
,y
i
)) ≤ e
new
.threshold then
train e
new
on (x
i
,y
i
)
promote e
new
if the conditions are met
else
mark (x
i
,y
i
) as a high-loss sample
end
else
train e
best
on (x
i
,y
i
)
end
// Process outliers
if R is not full then
return
end
(x
last
,y
last
) ← the oldest sample in R
if (x
last
,y
last
) is marked as high-loss then
e
last
← the expert that was trained on the
previous sample to (x
last
,y
last
)
train e
last
on (x
last
,y
last
)
end
remove (x
last
,y
last
) from R
(x
last
,y
last
) ← the new oldest sample in R
// Detect task switches
if every remaining entry in R is a high-loss sample
then
e
last
← the expert with the lowest
autoencoding loss on (x
last
,y
last
)
test the loss of e
last
on the samples in R and
the samples in e
last
.replay buffer
if the losses are statistically different then
create a new expert e
new
train e
new
on the samples in R
else
train e
last
on the samples in R
end
remove all samples from r
end
Algorithm 1: Pseudocode for the GE algorithm.
the new expert is consistently lower, then the new
expert can be promoted: the expert is removed
from the set of newly created experts and treated
as a regular expert. The promotion condition is
met when the proportion of lower losses in the last
promotion window samples exceeds ε
promotion
. In
GE, we set promotion window = 50 and ε
promotion
=
0.5.
A relatively low value of ε
promotion
is possible
as GE does not require perfect accuracy when for-
warding samples. Under the assumption of hard task
boundaries, adjacent samples are highly likely to be-
Data: (x
i
,y
i
) = the incoming sample
E = the tree of existing experts
Result: e
best
= the expert with the lowest
autoencoding loss on (x
i
,y
i
)
n ← the root node of E
while True do
if n has no children then
return
end
c ← the node in n.children with the lowest
AE Loss(c.expert, (x
i
,y
i
))
if e
best
does not yet exist or AE Loss(c.expert,
(x
i
,y
i
)) < AE Loss(e
best
, (x
i
,y
i
)) then
e
best
← c.expert
else
return
end
end
Algorithm 2: HGE forward - In HGE, the most relevant
expert for a given sample is found by starting at the root
and repeatedly choosing the best child.
long to the same task. When a sample is forwarded to
the wrong expert, a temporary high-loss is observed
similar to an outlier. In both cases, the sample will be
assigned to the same expert as the previous sample.
3.3 Comparison to TAME
The main advantage of GE over TAME is in the
high-loss buffer. Performing a statistical test be-
fore detecting a task switch greatly reduces the false-
positive rate, as we show experimentally in Sec-
tion 5.1. In addition, in TAME one or more samples
may be wrongly trained on the active expert before the
EWMA of the loss exceeds the acceptable threshold.
This is prevented in GE as samples over the threshold
are immediately set aside.
Another difference is in the lack of an active ex-
pert in GE. By assigning each sample to the expert
with the lowest autoencoding loss, the algorithm is
simplified as task switches between existing tasks are
a non-factor. In practice, the last-used expert could
be tracked to improve the efficiency of GE. If an in-
coming sample has a loss within the threshold of the
last-used expert, then we can assign it to said expert
without calculating all of the autoencoding losses.
4 HIERARCHICALLY GATED
EXPERTS
In GE the autoencoding losses are used as a measure
of the suitability of an expert to a given sample. We
hypothesise the existence of relationships between ex-
perts such that the suitability of an expert can be esti-
Hierarchically Gated Experts for Efficient Online Continual Learning
511

mated from the autoencoding losses of its peers. For
example, if experts A and B are both trained on tasks
in the same domain then we can expect that they will
produce a low autoencoding loss for any sample from
said domain. Thus, if expert A produces a high au-
toencoding loss then we can assume that the sample
originates from a different domain, and that expert B
will likewise be unsuitable.
We propose the idea of organising experts hierar-
chically to exploit these relationships and improve the
speed with which an expert can be selected for a given
sample. Our algorithm, named Hierarchically Gated
Experts (HGE), is an extension to GE where the set
of existing experts is instead a tree with each node
(except the root) corresponding to a specific expert.
Given a sample, we traverse the tree by following the
child with the lowest autoencoding loss at each step.
We stop when a leaf node is reached or when the cur-
rent node has a lower autoencoding loss than each of
its children. The final node is then considered to cor-
respond to the expert with the overall lowest autoen-
coding loss. Thus, an expert can be selected with-
out calculating the autoencoding loss for all experts.
The pseudocode for the traversal is provided in Algo-
rithm 2.
The tree of experts is built iteratively. As each
expert is promoted, it is added to the tree such that
samples from the corresponding task will be correctly
assigned to the expert. This can be trivially accom-
plished by adding the expert as a child of the root, so
that its autoencoding loss will always be calculated.
However, such a strategy will produce a completely
flat tree and be equivalent to the GE algorithm. Thus,
we instead aim to insert the expert as deeply as pos-
sible while maintaining assignment accuracy. As a
newly created expert is trained, we track the traversal
paths taken by every sample the expert is given. When
the expert is promoted, it is inserted as a child of the
lowest common ancestor (LCA) of all traversal paths.
Outlier paths, which are only taken a few times, are
excluded according to the promotion path threshold
hyperparameter. The pseudocode for expert promo-
tion is provided in Algorithm 3.
When a new expert is added to the tree, it is pos-
sible that it will mask some of the existing experts,
causing catastrophic forgetting. With reference to
Figure 1, expert 0 will mask expert 3 if, on samples
from task 3, expert 0 has a lower autoencoding loss
than expert 1. When an expert is inserted, all descen-
dants of siblings can potentially be masked. To miti-
gate this, the replay buffer of each potentially masked
expert is used to estimate if masking will occur. If any
replay samples are incorrectly assigned to the new ex-
pert, then a new node corresponding to the masked ex-
root
0 1
2 3 4
Figure 1: An example tree generated by HGE. Each node
corresponds to a different expert.
Data: E = the tree of existing experts
e
new
= the expert to be promoted
paths = a list of the unique paths taken by the
samples on which e
new
was trained. Each path also
contains a count of the number of times it was
taken.
e
new
node ← a new node with e
new
node.expert =
e
new
and no children
if there is only one expert in E then
add e
new
node as a child of the root node of E
return
end
// Insert expert into tree
sort paths by count in decreasing order
for p in paths do
sum ← the cumulative sum of counts up to
and including p
total ← the sum of all counts in paths
if sum > promotion path threshold * total
then
remove all remaining members of paths
end
end
parent ← the LCA of all remaining p in paths
add e
new
node as a child of parent
// Add backward connections
possible overwrites ← {}
for each descendant n of parent excluding
e
new
node do
add n.expert to possible overwrites
end
for e
overwr ite
in possible overwrites do
if there exists (x
i
,y
i
) in e
overwr ite
.replay buffer
where HGE forward(E, (x
i
,y
i
)) = e
new
then
add a node n as a child of e
new
node with
n.expert = e
overwr ite
end
end
Algorithm 3: Expert Promotion in HGE.
pert is added as a child of the new expert. We choose
to create a new node rather than add a connection to
the existing node so that we do not unnecessarily add
the descendants of the masked expert.
The hierarchical organisation of experts compli-
cates the promotion process. In GE, there is a wide
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
512

range of possible promotion times as the algorithm is
able to handle samples being forwarded to the wrong
expert. In HGE, however, it is much easier for the pro-
motion of an expert to be performed too early. When
an expert is promoted in HGE, it is added to the tree
in a way that exploits the relationship between the au-
toencoders. As the expert continues to train, these
relationships may change and the expert may begin
to mask others, causing catastrophic forgetting. Thus,
a higher ε
promotion
is preferred. On the other hand,
a promotion threshold that is too high may never be
met.
In our experiments, we set a separate ε
promotion
for
each scenario roughly equal to the accuracy achieved
at the end of training. This approach works reason-
ably well, but it does break the Online Continual
Learning paradigm as we are using task-specific in-
formation. The promotion time is part of a larger
problem of dealing with changing relationships be-
tween experts, which we leave as a problem for future
research.
5 EXPERIMENTS
In this section, we experimentally evaluate our ap-
proach to task switch detection in the Online Con-
tinual Learning setting. We also perform controlled
experiments with GE and HGE to determine the im-
pact of hierarchical expert organisation on the gating
accuracy. Finally, we validate GE and HGE on Online
Continual Learning benchmarks.
We use widely known and commonly adopted
Continual Learning scenarios in our experiments:
Permuted MNIST (PMNIST). The MNIST dataset
(Lecun et al., 1998) is used as the first task in this sce-
nario. Each subsequent task reuses MNIST, but with
the pixels in each image randomly permuted. The per-
mutations are kept consistent within each task. There
are 20 tasks in total.
Split MNIST (SMNIST). The MNIST dataset is split
into 5 tasks, each containing 2 classes.
Split CIFAR-10 (CIF10). The CIFAR-10 dataset
(Krizhevsky, 2012) is split into 5 tasks, each contain-
ing 2 classes.
Split CIFAR-100 (CIF100). The CIFAR-100 dataset
is split into either 10 or 20 tasks, each with the same
number of classes.
Split Tiny Imagenet (ImgNet). The Tiny Imagenet
dataset is a subset of Imagenet (Russakovsky et al.,
2015) containing images from 200 classes. We ran-
domly select 100 classes which are then evenly split
into either 10 or 20 tasks.
We also use scenarios that are both class-incre-
mental and domain-incremental. Each scenario in-
volves two datasets where the classes are split evenly
into tasks. The tasks are presented in an alternating
fashion; the first task from the first dataset, then the
first task from the second dataset, then the second task
from the first dataset, and so on. The scenarios are:
MNIST and Kuzushiji-MNIST (MNIST-
KMNIST). We split the MNIST dataset and
Kuzushiji-MNIST (KMNIST) dataset (Clanuwat
et al., 2018) into 5 tasks each, for a total of 10 tasks.
MNIST and CIFAR-10 (MNIST-CIF10). Similar
to the previous scenario, we split each dataset into 5
tasks each.
CIFAR-10 and Inverse CIFAR-10 (CIF10-INV).
We split each dataset into 5 tasks. To produce the In-
verse CIFAR-10 dataset, we invert the colour of every
pixel. The dataset is otherwise identical to CIFAR-10.
CIFAR-100 and Tiny Imagenet (CIF-ImgNet).
Each dataset is split into 10 tasks. Only 100 ran-
domly selected classes are used from the Tiny Ima-
genet dataset.
We use two variants of experts in our experiments.
In the PMNIST, SMNIST and MNIST-KMNIST sce-
narios, both the base model and the autoencoder are
multi-layer perceptrons (MLP). Otherwise, we use
Resnet-18 (He et al., 2015) as the base model and a
convolutional autoencoder. We provide the full details
of the dataset preprocessing, models used and hyper-
parameters in the Appendix.
5.1 Task Switch Detection
Table 1: The number of task switch detection errors per
task, categorised as false positives (FP) or false negatives
(FN). Cases with runaway expert creation are marked DNF
(Did Not Finish). CIFAR (all) and Imagenet (all) refer to all
scenarios tested purely on these datasets.
GE GE w/o review TAME
Scenario FP FN FP FN FP FN
PMNIST 0 0 0 0 0 0
SMNIST 0 0 0 0 0.04 0.04
CIFAR (all) 0 0 DNF DNF DNF DNF
Imagenet (all) 0 0 DNF DNF DNF DNF
MNIST-KMIST 0 0.04 0 0 0 0
MNIST-CIF10 0 0 DNF DNF DNF DNF
CIF10-INV 0 0 DNF DNF DNF DNF
CIF-ImgNet 0 0 DNF DNF DNF DNF
We first test the effectiveness of our approach to task
switch detection. In each scenario, we observe the
creation of new experts and record cases where an
abnormal number of experts is created for a task.
Each additional expert is recorded as a false posi-
tive, whereas the case where no expert is created is
recorded as a false negative. When runaway expert
creation is observed (more than five per task), we ter-
Hierarchically Gated Experts for Efficient Online Continual Learning
513

Table 2: The accuracy and efficiency of different approaches to organising the expert tree. Acc refers to the percentage of
batches which were assigned to the correct expert, whilst Exp is the average number of experts queried.
GE HGE Upper
Scenario Acc Exp Acc Exp Acc Exp
PMNIST 100.0 ±0.0 20 99.76 ±0.11 11.25 ±1.02 99.7 ±0.19 8.05 ±0.13
SMNIST 100.0 ±0.0 5 98.26 ±1.4 3.83 ±0.21 99.75 ±0.56 3.56 ±0.09
CIF10 95.25 ±5.11 5 95.0 ±5.66 4.17 ±0.55 95.0 ±5.66 3.85 ±0.38
CIF100(10) 77.25 ±2.05 10 76.75 ±1.9 9.49 ±0.85 75.0 ±4.59 8.02 ±0.33
CIF100(20) 83.25 ±8.08 20 82.75 ±7.52 17.55 ±1.43 84.0 ±8.59 12.84 ±0.74
ImgNet(10) 61.0 ±13.3 10 61.0 ±13.3 9.7 ±0.42 59.0 ±12.57 8.47 ±0.5
ImgNet(20) 73.5 ±5.76 20 73.5 ±5.76 19.02 ±0.93 73.5 ±2.85 15.03 ±0.6
MNIST-KMIST 95.25 ±5.94 10 95.25 ±5.94 6.42 ±0.57 95.01 ±5.72 5.13 ±0.09
MNIST-CIF10 98.88 ±0.52 10 98.75 ±0.77 5.29 ±0.1 98.4 ±1.01 4.92 ±0.16
CIF10-INV 98.25 ±0.93 10 97.88 ±0.71 6.62 ±0.99 98.0 ±0.93 5.31 ±0.19
CIF-ImgNet 68.88 ±1.49 20 68.88 ±1.49 19.06 ±0.81 68.38 ±1.44 15.6 ±0.65
minate the experiment early. We compare the GE al-
gorithm with TAME and also perform an ablation test
(GE w/o review) where we apply GE but do not per-
form a statistical test before creating a new expert.
Our results are summarised in Table 1. The low
error rate of GE across all scenarios demonstrates the
efficacy of our approach to task switch detection. The
TAME and ablation test results reflect the nature of
the base models used in our experiments. The 3-
layer MLP is relatively stable during training, and as
a result we see very few errors in the pure MNIST
scenarios. On the other hand, our Resnet-18 model
has high instability, which causes runaway expert cre-
ation. These results show the importance of the statis-
tical test in differentiating between spikes in the loss
due to training instability and spikes due to data from
a new task.
We observed a small number of false negatives for
GE in the MNIST-KMNIST scenario. Upon analysis,
we found that the algorithm was able to re-use an ex-
isting expert with no loss in accuracy.
In our experiments, we observed much higher
z-scores than expected; over 20,000 during task
switches and up to 10 during some spikes in the train-
ing loss. Thus, our assumption that the training loss
is normally distributed does not hold well in prac-
tice. However, we still saw a clear separation between
the z-scores in both situations, and tuning the z-score
threshold hyperparameter ε
review
was not necessary.
We set ε
review
to a relatively high value and found this
worked for all scenarios.
5.2 Hierarchical Organisation
We aim to determine the impact of hierarchical or-
ganisation on the accuracy and efficiency of the ex-
pert selection process. We control for other factors
in Online Continual Learning, such as training sam-
ples being assigned to the wrong expert, by instead
training a separate expert on each task. We only mea-
sure the accuracy with which a sample is assigned to
the correct expert and do not consider the classifica-
tion accuracy. We measure the cost of a tree as the
number of experts queried for a given sample. After
all experts are trained, we apply three approaches to
expert organisation:
GE. The experts are organised in a fully flat tree.
HGE. In the same manner as the HGE algorithm, a
tree of experts is built by incrementally adding experts
according to task order. As each expert is trained sep-
arately, we do not have any traversal paths to track.
Instead, when an expert is added to the tree the traver-
sal paths are calculated for all training samples in the
corresponding task.
Upper. The HGE algorithm is run a large number of
times (1000) with a randomised task order, and the
accuracy and cost of each generated tree is recorded.
We then select the tree with the lowest cost and an
accuracy at least as high (approximately) as the GE
tree. This approach estimates the best possible tree
given the trained experts.
Our results are shown in Table 2. Both the HGE
and Upper approaches are able to produce trees with
close to optimal accuracies. In general, the cost re-
duction with HGE is dependent on the expert selec-
tion accuracy, with a markedly lower cost in scenar-
ios where the accuracy is high. This trend is also ob-
served with the Upper strategy, but to a lesser extent
as there is a decent cost reduction even when the se-
lection accuracy is low.
We also provide a statistical analysis of the accu-
racies and costs of the trees generated during the Up-
per strategy. We analyse the spread of the accuracy
and cost as well as the correlation between the two.
The results are provided in Table 3. We observe a low
but positive level of correlation across the board. We
believe that deeper trees are able to have a lower cost,
but may also suffer a lower accuracy as deeper nodes
have a higher chance of being masked.
We observe a very low level of spread in the accu-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
514
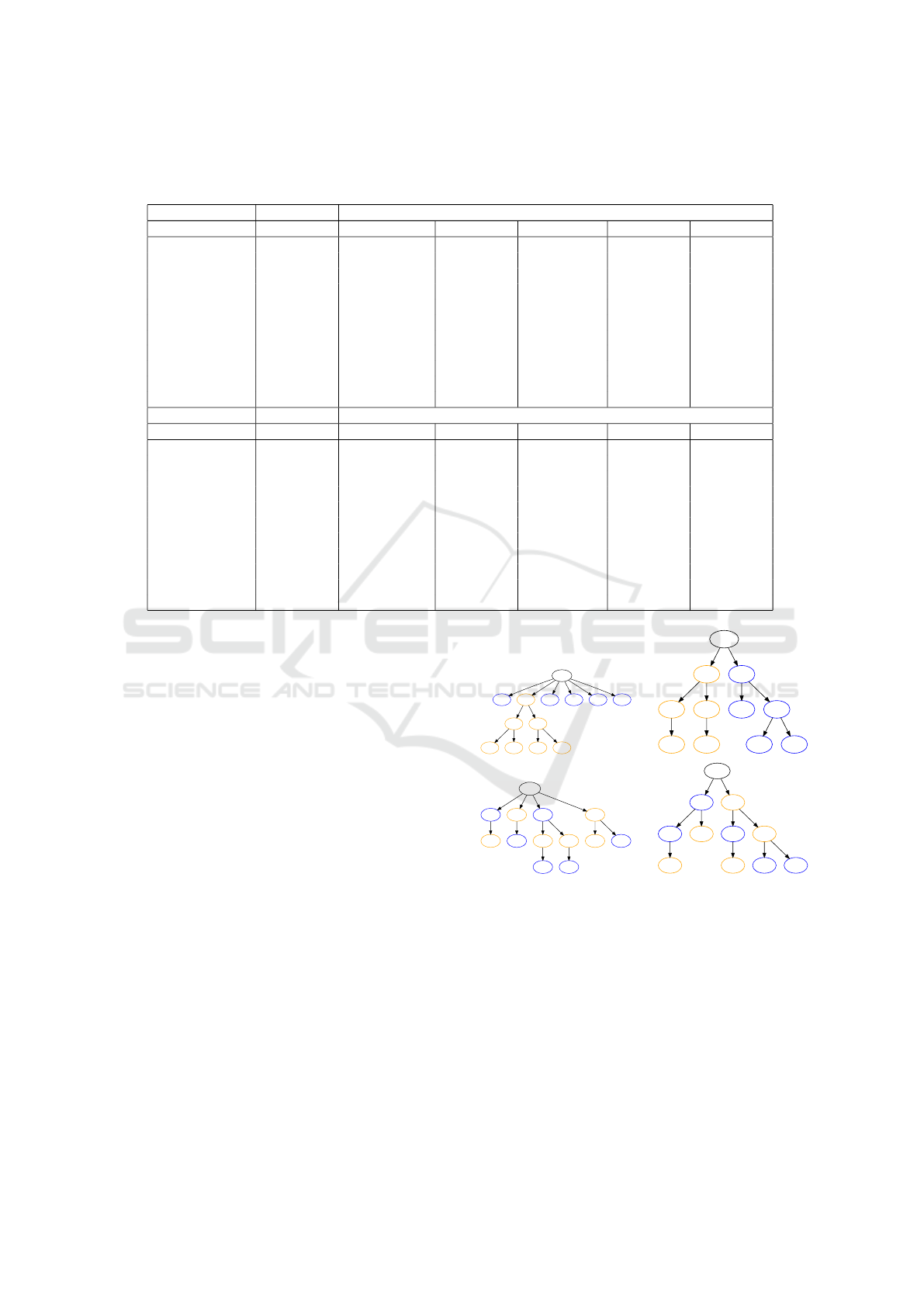
Table 3: A statistical analysis of the accuracy and query costs of all trees generated while finding an upper bound. PCC and
SCC are respectively the Pearson and Spearman correlation coefficients, whilst MAD is the median absolute deviation. Each
metric is computed over all trees generated for a set of experts, then averaged across every set.
Acc
Scenario PCC Mean STD Median IQR MAD
PMNIST 0.13 ±0.06 99.57 ±0.04 0.45 ±0.08 99.71 ±0.03 0.39 ±0.07 0.19 ±0.0
SMNIST 0.3 ±0.19 99.55 ±0.48 0.7 ±0.6 100.0 ±0.0 0.72 ±1.06 0.0 ±0.0
CIF10 0.02 ±0.03 95.08 ±5.46 0.28 ±0.41 95.12 ±5.38 0.25 ±0.56 0.12 ±0.28
CIF100(10) 0.55 ±0.19 77.03 ±1.98 0.53 ±0.13 77.25 ±2.05 0.25 ±0.56 0.0 ±0.0
CIF100(20) 0.13 ±0.18 83.07 ±7.93 0.86 ±0.09 83.25 ±8.08 0.25 ±0.56 0.0 ±0.0
ImgNet 10) 0.11 ±0.29 60.97 ±13.28 0.39 ±0.2 61.0 ±13.3 0.0 ±0.0 0.0 ±0.0
ImgNet(20) 0.18 ±0.22 73.42 ±5.6 1.06 ±0.24 73.5 ±5.76 0.0 ±0.0 0.0 ±0.0
MNIST-KMIST 0.09 ±0.12 95.13 ±5.91 0.36 ±0.1 95.25 ±5.94 0.12 ±0.28 0.0 ±0.0
MNIST-CIF10 0.01 ±0.08 98.78 ±0.57 0.21 ±0.26 98.88 ±0.52 0.12 ±0.28 0.0 ±0.0
CIF10-INV 0.14 ±0.12 98.03 ±0.84 0.52 ±0.17 98.25 ±0.93 0.12 ±0.28 0.12 ±0.28
CIF-ImgNet 0.31 ±0.12 68.77 ±1.47 0.44 ±0.14 68.88 ±1.49 0.0 ±0.0 0.0 ±0.0
Exp
Scenario SCC Mean STD Median IQR MAD
PMNIST 0.17 ±0.08 11.32 ±0.32 1.45 ±0.14 11.16 ±0.34 1.97 ±0.22 0.97 ±0.1
SMNIST 0.36 ±0.21 4.08 ±0.09 0.32 ±0.03 4.07 ±0.15 0.41 ±0.02 0.26 ±0.07
CIF10 0.03 ±0.07 4.29 ±0.36 0.31 ±0.05 4.25 ±0.33 0.55 ±0.17 0.22 ±0.12
CIF100(10) 0.54 ±0.21 9.72 ±0.14 0.39 ±0.09 9.87 ±0.29 0.45 ±0.3 0.1 ±0.23
CIF100(20) 0.12 ±0.2 17.56 ±0.89 1.37 ±0.11 17.65 ±0.97 1.78 ±0.18 0.88 ±0.12
ImgNet 10) 0.05 ±0.31 9.86 ±0.1 0.26 ±0.12 10.0 ±0.0 0.13 ±0.29 0.0 ±0.0
ImgNet(20) 0.15 ±0.21 19.07 ±0.33 0.91 ±0.18 19.19 ±0.31 1.25 ±0.35 0.64 ±0.12
MNIST-KMIST 0.1 ±0.12 6.51 ±0.18 0.64 ±0.09 6.46 ±0.2 0.87 ±0.19 0.45 ±0.07
MNIST-CIF10 0.02 ±0.1 5.91 ±0.13 0.72 ±0.04 5.62 ±0.13 0.94 ±0.12 0.34 ±0.05
CIF10-INV 0.14 ±0.13 7.25 ±0.28 0.85 ±0.13 7.22 ±0.32 1.18 ±0.18 0.57 ±0.08
CIF-ImgNet 0.27 ±0.13 19.37 ±0.14 0.73 ±0.09 19.62 ±0.35 1.02 ±0.27 0.38 ±0.35
racies of the trees. The spread of the costs is higher
but still relatively low. Thus, we conclude that HGE is
not overly affected by the task order and is generally
able to organise the experts with close to the optimal
possible efficiency and cost.
A manual examination of the trees confirms these
findings, as the HGE trees share many similarities
with the Upper trees. Figure 2 showcases this; both
HGE and Upper organise the experts according to do-
main in CIF10-INV, and in MNIST-KMNIST we see
identical connections such as between experts 7 and 3
or 2 and 5.
5.3 Continual Learning Benchmarks
We evaluate the overall efficacy of GE and HGE by
providing a benchmark of the accuracies achieved by
these algorithms in an Online Continual Learning set-
ting. We also provide an estimate of the accuracy that
can be achieved given the base models used. The Sep-
arate method creates a separate model for each task
and uses task information to assign the samples, thus
serving as an upper bound.
Our results are presented in Table 4 and 5. We
measure accuracy as the average accuracy achieved
over all tasks at the end of training. We also report
the accuracy with which batches were assigned to the
correct expert (Gate Acc). During training, we track
root
0 1 2 4 6 8
3 9
5 7 5 7
root
7 8
1 5
9 3
0 4
2 6
root
0 1 2 7
9 4 3 5
6 8
3 6
root
0 7
4 9
1
2 3
5 6 8
Figure 2: Examples of trees generated by HGE and Upper.
Clockwise starting from the top-left: HGE on CIF10-INV,
Upper on CIF10-INV, Upper on MNIST-KMNIST, HGE on
MNIST-KMNIST. The nodes are coloured according to the
domain.
the samples assigned to each expert and record an as-
sociation between an expert and a task if the expert
was trained on at least 10% of the samples in the
task. During testing, we then measure the percent-
age of samples assigned to the correct expert. Finally,
we also report the average number of experts queried
during testing.
For comparison, we also provide the accuracy
Hierarchically Gated Experts for Efficient Online Continual Learning
515
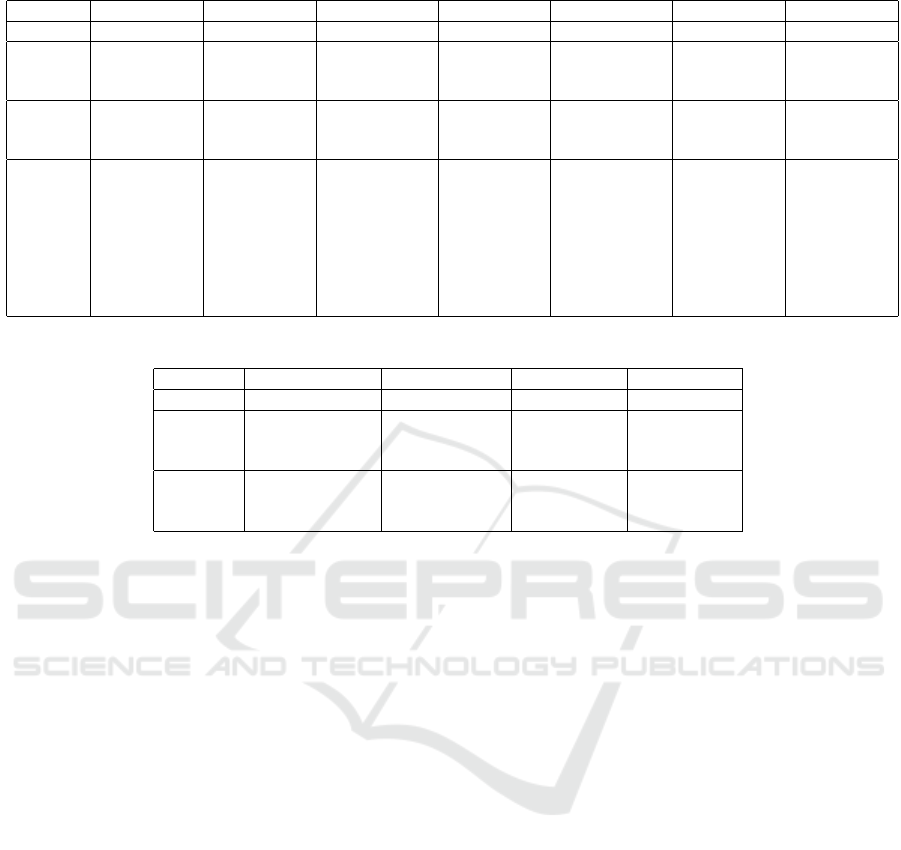
Table 4: Accuracy on continual learning benchmarks (%).
Method PMNIST SMNIST CIF10 CIF100(10) CIF100(20) ImgNet(10) ImgNet(20)
Separate 97.9 ±0.0 99.44 ±0.15 93.1 ±2.03 70.96 ±0.32 80.1 ±0.89 53.76 ±1.04 67.3 ±0.62
GE 97.9 ±0.07 99.54 ±0.09 89.06 ±4.05 51.96 ±6.31 65.62 ±5.76 31.02 ±5.3 49.26 ±3.17
Gate Acc 100.0 ±0.0 100.0 ±0.0 96.78 ±3.36 73.02 ±8.41 81.04 ±7.09 59.0 ±9.45 71.5 ±5.76
Exp 20 5 5 10 20 10 20
HGE 82.3 ±7.01 99.48 ±0.04 87.08 ±9.1 47.42 ±4.62 67.76 ±7.92 30.68 ±2.07 42.48±6.28
Gate Acc 82.18 ±8.03 100.0 ±0.0 92.25 ±10.21 68.28 ±5.75 83.54 ±10.41 57.5 ±3.95 61.5 ±9.78
Exp 8.75 ±0.97 4.37 ±0.49 4.26 ±0.61 10.0±0.0 17.79 ±1.23 9.91 ±0.19 18.91 ±0.54
BGD 79.15 19.00 N/A N/A 3.77 N/A N/A
HCL N/A 90.89 89.44 59.66 N/A N/A N/A
TAME 87.32 98.63 91.32 61.06 62.39 N/A N/A
HVCL 97.47 98.60 81.00 37.20 N/A N/A N/A
CN-DPM N/A 93.23 46.98 N/A 20.10 N/A N/A
SNCL 92.93 N/A 90.41 N/A N/A N/A 39.83
DER 91.66 N/A 83.81 74.64 73.98 N/A 36.73
HN N/A N/A N/A N/A 73.6 N/A 39.9
Table 5: Accuracy on hybrid scenarios (%).
Method MNIST-KNIST MNIST-CIF10 CIF10-INV CIF-ImgNet
Separate 99.54 ±0.05 96.56 ±0.62 93.4 ±1.26 63.5 ±0.71
GE 99.38 ±0.16 95.26 ±1.42 90.3 ±1.86 41.68 ±4.65
Gate Acc 100.0 ±0.0 98.52 ±1.22 96.88 ±1.16 66.16 ±8.2
Exp 10 10 10 20
HGE 94.18 ±8.33 88.62 ±7.65 85.84 ±8.09 37.6 ±3.74
Gate Acc 93.16 ±8.45 91.76 ±7.51 91.9 ±8.01 59.9 ±7.23
Exp 6.66 ±1.22 5.08 ±0.31 7.47 ±1.56 19.22 ±0.65
achieved by all the other existing continual learning
methods described in Section 2.2. The BGD results
are taken from Zhu et al. (2022) and part of the DER
results from Yan et al. (2022). All other results are as
reported in their corresponding papers cited in Sec-
tion 2.2.
Overall, GE is able to match or exceed the state-
of-the-art in most benchmarks. Although the com-
parison with other techniques is not entirely fair due
to some differences in experimental setup, the results
still show that our algorithm is competitive with the
compared techniques in Online Continual Learning.
One exception is the 10-task split CIFAR-100 and
Tiny Imagenet scenarios, where there is a low gat-
ing accuracy. We hypothesise that the higher number
of classes per task leads each autoencoder to learn a
more general representation of the data rather than fit-
ting specifically to the task. To test this, we exploit
the additional labels in CIFAR-100, where each class
is part of 1 of 20 superclasses. If we split by pairs
of superclasses rather than randomly, the gating accu-
racy increases to 87.5%, however the overall accuracy
increases only to 52.65% due to a lower classification
accuracy between classes within a superclass.
In HGE, we observed a decreased accuracy across
the board compared with GE. Whilst this is to be
expected, we found larger drops in scenarios where
the number of experts queried also distinctly dropped.
Thus, we hypothesise that the main cause of the de-
creased accuracy is the changing relationships be-
tween experts as described in Section 4.
6 CONCLUSION
In this paper, we proposed an alternative to TAME for
task switch detection in the Online Continual Learn-
ing setting. We showed that our approach is better
equipped to handle models with unstable training, and
applied this approach to extend Expert Gate (Aljundi
et al., 2017) to our online Gated Experts (GE) al-
gorithm. Then, we proposed the novel HGE exten-
sion, where experts are organised hierarchically, as
a method to improve the efficiency of GE and pos-
sibly other expert-based algorithms. We performed
controlled experiments to determine that HGE is able
to organise a set of experts in a manner that is close
to optimal. Finally, we benchmarked GE and HGE on
standard Continual Learning datasets and found GE
to be competitive with the state-of-the-art.
The major problem of HGE is in the changing re-
lationships between experts as they are trained, which
causes samples to be assigned incorrectly. As a re-
sult, we observed a lower HGE accuracy in the On-
line Continual Learning setting. The changing rela-
tionships also make it difficult to determine the opti-
mal time to promote a newly created expert. Future
research could be conducted into methods for peri-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
516

odically updating the expert tree to accommodate the
changing relationships.
HGE also suffers from poor efficiency when
adding a new expert to the tree, as all descendants
of siblings have to be checked for masking. More ef-
ficient approaches to building the expert tree may be
possible. The use of autoencoders is also not strictly
necessary and other methods for measuring expert
suitability could be considered.
REFERENCES
Aljundi, R., Chakravarty, P., and Tuytelaars, T. (2017). Ex-
pert gate: Lifelong learning with a network of experts.
In 2017 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 7120–7129.
Chaudhry, A., Rohrbach, M., Elhoseiny, M., Ajanthan, T.,
Dokania, P. K., Torr, P. H. S., and Ranzato, M. (2019).
On tiny episodic memories in continual learning.
Clanuwat, T., Bober-Irizar, M., Kitamoto, A., Lamb, A.,
Yamamoto, K., and Ha, D. (2018). Deep learning for
classical japanese literature. CoRR, abs/1812.01718.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition.
Hemati, H., Lomonaco, V., Bacciu, D., and Borth, D.
(2023). Partial hypernetworks for continual learning.
Hihn, H. and Braun, D. A. (2023). Hierarchically structured
task-agnostic continual learning. Machine Learning,
112(2):655–686.
Kang, H., Mina, R. J. L., et al. (2022). Forget-free continual
learning with winning subnetworks. In Proceedings of
the 39th International Conference on Machine Learn-
ing, pages 10734–10750. PMLR.
Kirichenko, P., Farajtabar, M., Rao, D., Lakshminarayanan,
B., Levine, N., Li, A., Hu, H., Wilson, A. G., and Pas-
canu, R. (2021). Task-agnostic continual learning with
hybrid probabilistic models. CoRR, abs/2106.12772.
Kirkpatrick, J., Pascanu, R., et al. (2017). Over-
coming catastrophic forgetting in neural networks.
Proceedings of the National Academy of Sciences,
114(13):3521–3526.
Krizhevsky, A. (2012). Learning multiple layers of features
from tiny images. University of Toronto.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Lee, S., Ha, J., Zhang, D., and Kim, G. (2020). A neural
dirichlet process mixture model for task-free continual
learning. CoRR, abs/2001.00689.
Li, Z. and Hoiem, D. (2017). Learning without forgetting.
Lin, D. (2013). Online learning of nonparametric mixture
models via sequential variational approximation. In
Advances in Neural Information Processing Systems,
volume 26. Curran Associates, Inc.
Lopez-Paz, D. and Ranzato, M. (2017). Gradient
episodic memory for continuum learning. CoRR,
abs/1706.08840.
Nguyen, C. V., Li, Y., Bui, T. D., and Turner, R. E. (2018).
Variational continual learning.
Parisi, G. I., Kemker, R., Part, J. L., Kanan, C., and
Wermter, S. (2018). Continual lifelong learning with
neural networks: A review. CoRR, abs/1802.07569.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Ima-
genet large scale visual recognition challenge.
Shazeer, N., Mirhoseini, A., Maziarz, K., Davis, A., Le,
Q., Hinton, G., and Dean, J. (2017). Outrageously
large neural networks: The sparsely-gated mixture-of-
experts layer.
Shin, H., Lee, J. K., Kim, J., and Kim, J. (2017). Continual
learning with deep generative replay.
Wang, L., Zhang, X., Su, H., and Zhu, J. (2024). A compre-
hensive survey of continual learning: Theory, method
and application.
Wortsman, M., Ramanujan, V., Liu, R., Kembhavi, A.,
Rastegari, M., Yosinski, J., and Farhadi, A. (2020).
Supermasks in superposition.
Xu, J. and Zhu, Z. (2018). Reinforced continual learning.
Yan, Q., Gong, D., Liu, Y., van den Hengel, A., and Shi,
J. Q. (2022). Learning bayesian sparse networks with
full experience replay for continual learning. In 2022
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 109–118.
Yan, S., Xie, J., and He, X. (2021). DER: Dynamically Ex-
pandable Representation for Class Incremental Learn-
ing . In 2021 IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR) , pages 3013–
3022, Los Alamitos, CA, USA. IEEE Computer Soci-
ety.
Yoon, J., Yang, E., Lee, J., and Hwang, S. J. (2018). Life-
long learning with dynamically expandable networks.
In 6th International Conference on Learning Repre-
sentations, ICLR 2018.
Zenke, F., Poole, B., and Ganguli, S. (2017). Continual
learning through synaptic intelligence. In Proceed-
ings of the 34th International Conference on Machine
Learning - Volume 70, ICML’17, page 3987–3995.
JMLR.org.
Zeno, C., Golan, I., Hoffer, E., and Soudry, D. (2018). Task
agnostic continual learning using online variational
bayes. arXiv preprint arXiv:1803.10123.
Zhu, H., Majzoubi, M., Jain, A., and Choromanska, A.
(2022). Tame: Task agnostic continual learning us-
ing multiple experts.
APPENDIX
In this section we provide hyperparameters and other
details crucial to recreating our results.
Datasets. In the PMNIST, SMNIST and MNIST-
KMNIST scenarios, the 28x28 images are flattened
into 784-dimensional vectors. In all other scenarios,
all images are first resized to 32x32 before further
Hierarchically Gated Experts for Efficient Online Continual Learning
517

preprocessing is applied. In the MNIST-CIF10 sce-
nario, the MNIST dataset is converted from grayscale
to RGB to ensure compatibility with the Resnet-18
model. In the CIF10-INV scenario, the colour of
each pixel is inverted to produce the Inverse CIFAR-
10 dataset. The final step of preprocessing re-scales
the pixel values to [0,1].
Following the preprocessing, the images are then
split by class into separate tasks. Each experiment run
has its own random split. The exception to this is the
experiments in section 5.2. Here, we performed the
split, trained the experts, then finally applied all three
methods. Thus, the generated trees can be directly
compared as the splits (and experts) are identical.
Base Models. All models were implemented us-
ing PyTorch. In the PNIST, SMNIST and MNIST-
KMNIST scenarios, each expert was a 3-layer MLP
with a 4-layer MLP as the autoencoder. The MLP
base model consists of 3 Linear() layers followed by
a ReLU() each. The hidden activations were 100-
dimensional. We treat the final outputs as logits and
train them using CrossEntropyLoss(). During test
time, the prediction is simply the index with the high-
est logit. We used a batch size of 128 in all cases.
The MLP autoencoder is a variational autoen-
coder with a 32-dimensional latent space. The en-
coder layers, in order, are Linear(784,512), ReLU(),
then a separate Linear(512,32) for the mean and log-
variance. The latent distribution is sampled using the
reparametrisation trick. Let ε be the 32-dimensional
vector sampled from a Gaussian distribution with 0
mean and 1 variance. The latent sample is then
µ + e
(σ∗0.5)
∗ε where µ and σ are the mean and log-
variance vectors outputted by the encoder. At this
point, we also compute the KL divergence loss of the
output mean and log-variance as −0.5 ∗(1 + σ −µ
2
−
e
σ
). To obtain a scalar for the KL loss, we sum across
the 32 dimensions.
The decoder layers are Linear(32,512), ReLU(),
Linear(512, 784), Sigmoid(). To train the autoen-
coder, we combined the computed KL loss with the
MSELoss() between the decoder output and the input
image Tensor.
In all other scenarios, we use Resnet-18 as the
base model and a convolutional variational autoen-
coder with 64-dimensional latent space. For ref-
erence, the arguments to Conv2d, in order, are in-
put channels, output channels, kernel size, stride and
padding. The encoder layers are Conv2d(3,32,3,1,1),
BatchNorm2d(32), ReLU(), Conv2d(32, 64, 3, 1, 1),
BatchNorm2d(64), ReLU(), Flatten(), Linear(65536,
128), followed by a separate Linear(128, 64) for the
mean and log-variance.
The decoder layers are Linear(64, 128),
ReLU(), Linear(128, 65536), ReLU(), Unflat-
ten(64Cx32Hx32W), ConvTranspose2d(64, 32,
3, 1, 1), BatchNorm2d(32), ReLU(), ConvTrans-
pose2d(32, 3, 3, 1, 1). As with the fully connected
autoencoder, we use MSELoss() for the recon-
struction error and the same calculation for the KL
loss.
We tested regular autoencoders in place of varia-
tional autoencoders by simply using the encoder mean
with no sampling, but found the results to be worse in
all cases. We also experimented between SGD and
Adam as the optimiser. In the CIF100, ImgNet and
CIF-ImgNet scenarios, we used Adam with lr=0.001
and weight decay=0.0001. In all other cases, we used
SGD with lr=0.01, momentum=0.9 and weight de-
cay=0.0001
Hyperparameters. Each experiment was repeated
5 times. The following hyperparameter values were
used in all scenarios:
• High-Loss Threshold ε = 4
• Z-score threshold ε
review
= 20
• Promotion path threshold = 0.98
• High-Loss buffer capacity = 20
• Expert replay buffer capacity = 10
The following hyperparameters were used per sce-
nario:
• PMNIST ε
promotion
= 0.98, epochs = 40
• SMNIST ε
promotion
= 0.98, epochs = 40
• CIF10 ε
promotion
= 0.95, epochs = 200
• CIF100(10) ε
promotion
= 0.75, epochs = 400
• CIF100(20) ε
promotion
= 0.80, epochs = 400
• ImgNet(10) ε
promotion
= 0.5, epochs = 400
• ImgNet(20) ε
promotion
= 0.65, epochs = 400
• MNIST-KMNIST ε
promotion
= 0.98, epochs = 100
• MNIST-CIF10 ε
promotion
= 0.98, epochs = 200
• CIF10-INV ε
promotion
= 0.95, epochs = 200
• CIF-ImgNet ε
promotion
= 0.5, epochs = 400
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
518
