
Leveraging Large Language Models for Preference-Based Sequence
Prediction
Michaela Tecson
1 a
, Daphne Chen
2 b
, Michelle Zhao
1 c
, Zackory Erickson
1 d
and Reid Simmons
1 e
1
Robotics Institute, Carnegie Mellon University, Pittsburgh, Pennsylvania, U.S.A.
2
Paul G. Allen School of Computer Science and Engineering, University of Washington, Seattle, Washington, U.S.A.
Keywords:
Meal Preparation, Sequence Prediction, User Preferences, Assistive Technology, Cooking Assistance, Large
Language Models, Action Anticipation.
Abstract:
We present a novel approach to leveraging Large Language Models (LLMs) for action prediction in meal
preparation sequences, with a focus on tailoring predictions based on user preferences. We introduce methods
using OpenAI’s GPT-4o model to predict subsequent actions in a sequence by providing different forms of
context such as sequences from other participants or prior sequences of the test participant. Our approach out-
performs baseline methods, including Aggregate Long Short-Term Memory (LSTM) and mixture-of-experts
(MoE) models, by up to 33.8% by leveraging the LLM’s ability to adapt predictions based on minimal prior
context. We highlight the generalizability of the method across different cooking domains by analyzing the
results on two different cooking datasets. This adaptability will be useful for assistive systems aiming to sup-
port older adults, especially those with Mild Cognitive Impairments (MCI), in completing complex, sequential
tasks in ways that align with the user’s preferences. The full prompts used in this work can be found at the
project webpage: sites.google.com/view/preference-based-prediction.
1 INTRODUCTION
Older adults, particularly those with Mild Cognitive
Impairments (MCI), often encounter significant chal-
lenges when performing complex, sequential tasks
such as meal preparation (Tuokko et al., 2005; Wher-
ton and Monk, 2010). Those with MCI may strug-
gle with maintaining their independence in their daily
routines, which can drastically undermine their sense
of well-being (Yu et al., 2023). Difficulties in cooking
caused by cognitive decline can also severely impact
their ability to meet nutritional needs, which is cru-
cial for maintaining overall health. The nutritional in-
take and dietary habits of individuals with MCI are
especially important to maintain (McGrattan et al.,
2018), yet meal preparation is an instrumental activ-
ity of daily living (IADL) that proves to be a chal-
lenge faced by many older adults with MCI everyday
(Johansson et al., 2015).
a
https://orcid.org/0009-0004-0611-0400
b
https://orcid.org/0009-0003-0382-7652
c
https://orcid.org/0000-0001-7522-2300
d
https://orcid.org/0000-0002-6760-6213
e
https://orcid.org/0000-0003-3153-0453
Assistance that takes into account the current
needs and long-standing habits of these individuals is
more likely to be effective and adopted by the target
population (Sanders and Martin-Hammond, 2019).
Additionally, prior work has shown that in-situ feed-
back systems significantly improve performance in
individual tasks for those with cognitive impairments
(Funk et al., 2015). Therefore, tailoring assistance
that acts in line with their personal preferences will
improve user acceptance, enhancing their quality of
life while maintaining their independence in daily ac-
tivities (Randers and Mattiasson, 2004).
In this work, we present a novel approach to
preference-based sequence prediction using large lan-
guage models (LLMs). While it may appear that there
are limited preferences to habitual meal preparation
tasks such as preparing a salad or a sandwich, our
work uncovers that there are multiple different pref-
erences for even simple meals, further motivating the
need for preference-based assistance.
We present two unique approaches to preference-
based sequential reasoning that each leverage the
capabilities of LLMs: Independent Context and
Shared Context. Our methods are able to dynam-
Tecson, M., Chen, D., Zhao, M., Erickson, Z. and Simmons, R.
Leveraging Large Language Models for Preference-Based Sequence Prediction.
DOI: 10.5220/0013190200003890
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 519-532
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
519

ically adapt their predictions based on observations
of both the user’s prior sequences and the current
context of actions that are taking place. Using prior
sequences to infer preferences, we can more accu-
rately predict what action a user will take next in a
cooking sequence. We show that both of these LLM
methods outperform baseline methods for sequence
prediction and prior work on preference-based pre-
diction. This approach could assist users, providing
guidance when they make a mistake or are unsure of
the next step, while still respecting their autonomy
and long-established cooking routines. The key con-
tributions of this work are:
• We introduce a novel approach of using LLMs for
preference-based sequence prediction.
• We evaluate our approach across two meal prepa-
ration datasets for multi-sequence preference pre-
diction and assess generalizability.
• We compare and contrast to prior state-of-the-art
methods for preference-based sequence predic-
tion, in which we observe a significant improve-
ment over prior work.
2 RELATED WORK
2.1 Learning Preferences for Sequential
Tasks
Prior work has used unsupervised clustering to extract
human preferences from sequential tasks and then ap-
plies those clusters to training specialized models. For
example, when exploring the problem of robot adap-
tion for collaborating with humans in sequential tasks,
prior work learns from human teams and adapts its
policies based on the preferences it learns from the
latent representation (Nikolaidis et al., 2015; Zhao
et al., 2022).
Others have studied the effectiveness of using a
mixture-of-experts approach to preference-based se-
quence prediction (Chen, 2023), similar to the un-
supervised learning described above. This method
uses an autoencoder to obtain the latent representa-
tion of sequences and then clusters those represen-
tations to reveal different strategies. A predictor is
trained on the sequences belonging to each cluster,
which serves as the “expert” that can do prediction
most accurately on a sequence belonging to that strat-
egy. However, these methods do not generalize well
in a real-world implementation because the predictor
training set and test set included sequences from the
same participant. Additionally, the predictors on both
the aggregate LSTM and mixture-of-experts in Chen
et al. (Chen, 2023) cannot incorporate any new strat-
egy information into their models. We show that our
method using LLMs can improve on these by adding
additional forms of context, even from the test partic-
ipant, to better inform the prediction.
Other methods explore learning and inferring hu-
man preferences in task sequencing using a two-stage
clustering approach (Nemlekar et al., 2021). This
method effectively clusters user preferences at both
the action level and event level to enhance prediction
accuracy in assembly tasks. It is applicable to the sce-
nario where a new person executes the same task that
the current model has demonstrations for. In contrast,
our approach leverages the LLM’s ability to infer the
preferences from an unseen participant and quickly
adapt its prediction for future sequences, rather than
having to rely on existing demonstrations for that par-
ticular task.
2.2 Using LLMs for Robotics
Several advancements have taken place in the appli-
cations of LLMs for zero-shot and few-shot reason-
ing for robot task planning problems (Singh et al.,
2022; Arenas et al., 2023; Hu et al., 2024; Lin et al.,
2023; Liang et al., 2023; Padmanabha et al., 2024).
Other works have leveraged the generalization capa-
bilities of LLMs to summarize the task specification
to be aligned with a person’s preferences (Wu et al.,
2023; Wang et al., 2023). TidyBot (Wu et al., 2023)
for example, is bringing tidying preferences to robot
grounded actions with just a few training examples.
The summarization is then used to create a set of rules
for that particular person, which dictates where the
items should go. The robot can then execute that set
of rules and carry out the tidying task according to the
preferences of the user.
Similarly, Demo2Code (Wang et al., 2023) uses
demonstrations to summarize the task specification
according to the user’s preference and generates per-
sonalized code to carry it out. These demonstrations
come in the form of detailed descriptions of the robot
state and actions and recursively summarizes these
from low-level actions to high-level subtasks. From
there, the algorithm expands the high-level subtasks
to action-level executable task code. However, works
involving code generation from demonstrations all re-
quire significant preprocessing of the task description
and the demonstrations into a compact form before
generating executable code. Additionally, these meth-
ods cannot dynamically update the executable code to
account for changes in user strategy over time, but
rather, they must regenerate the code with those new
demonstrations to incorporate those changes. This
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
520
can be problematic because a user may have multi-
ple or changing preferences for preparing a meal, and
the prior work would not capture that. They also gen-
erate code with the intention that the robot execute the
entire sequence on its own, which means the task ex-
ecution code is fixed and lacks the flexibility to adapt
during the task, as it is entirely pre-defined rather than
continually adjusting to new actions. In contrast, our
method continuously considers both prior preferences
and immediate context, integrating the most recent ac-
tions to reason dynamically and select the next action
based on current conditions. We propose a method de-
signed to work with the user that extends beyond static
rule-based execution as in prior work and can adapt to
a new user preference immediately. The method does
not just take prior sequences into account, but also
prior actions that have just occurred at test time. This
is particularly crucial in the use of an assistive cook-
ing system where the sequence of actions can vary
significantly based on individual preferences and sit-
uational context.
2.3 Assistive Cooking Systems
Many existing cooking assistants aim to provide as-
sistance to the users step-by-step (Chan et al., 2023;
Kosch et al., 2019; Sato et al., 2014; Hamada et al.,
2005; Bouchard et al., 2020). LLM-enabled conver-
sational assistants can provide contextual instructions
during cooking tasks (Chan et al., 2023; Le et al.,
2023). However, these methods generate their feed-
back or instructions based on a set recipe. They as-
sume there is a fixed order of steps that must be com-
pleted, not taking into account the different prefer-
ences that users may have for preparing their meal.
This includes varying ingredients, different ordering
of key steps, or specific techniques that a user may
want to do. In the work presented here, we show how
our methods can take into account the ways the same
dish can be prepared so that the assistance can be per-
sonalized based on the user’s cooking strategy. This
is especially important for the use of this technology
in people’s own homes where they’d like to carry out
the task in a way that aligns with their longstanding
habits.
3 METHODS
This section presents three methods of generating pre-
dictions that this paper compares: Our method of
context-based LLMs, aggregate LSTM, and mixture-
of-experts.
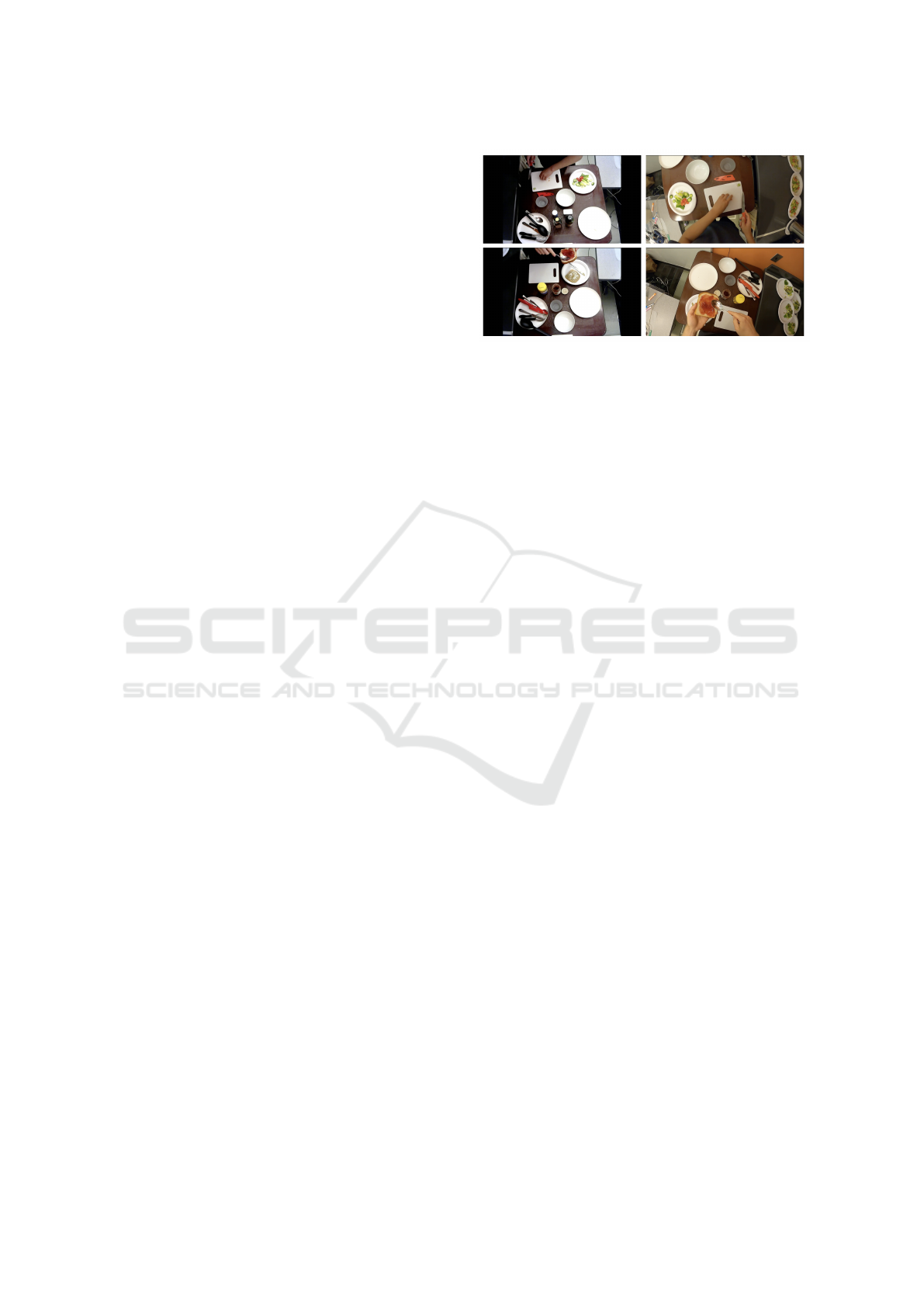
Figure 1: Frame captures from both the overhead camera
(left) and the headworn GoPro camera (right) for the salad
dataset (top) and sandwich dataset (bottom).
3.1 Datasets Used
All the methods described were tested on two cooking
datasets (Chen, 2023). We refer to them as the salad
dataset and sandwich dataset throughout this paper.
Both datasets consist of two camera views for each
sequence: top-down views from a ceiling-mounted
camera and egocentric view from a headworn GoPro
camera. See Figure 1 for examples of these views.
There were the same 17 participants in both datasets.
Participants were all healthy adults, ranging from 19-
82 years old (M = 37 years old, SD = 22); 65% Male,
35% Female.
For both datasets, participants were instructed to
make the salad or sandwich as if making a meal for
themselves in their own home (no recipe to follow)
with the ingredients they were given. Each partici-
pant completed the task five times, with each attempt
referred to as a sequence. Throughout the paper, we
will refer to these attempts as “Seq. n,” where n corre-
sponds to the order in which the task was completed,
ranging from 1 to 5.
The datasets were both annotated at a task-level
granularity, where each step corresponds to a key
stage in the process without delving into the fine-
grained sub-actions of object handling or preparation.
Some examples from the salad dataset are “cut
tomato”, “place tomato into bowl”, “add salt”,
and “mix ingredients”. Some examples from the
sandwich dataset are “place jam onto bread 1”,
“spread jam onto bread 1”, “put bread together”,
and “cut off crusts”.
The full list of actions for both datasets is included
in the Appendix.
Salad Dataset
• There are 18 unique actions in the dataset.
• Maximum sequence length was 27 actions.
Leveraging Large Language Models for Preference-Based Sequence Prediction
521

Users were provided with the following:
• Ingredients: lettuce, tomato, cucumber, cheese,
oil, vinegar, salt, pepper
• Utensils: plate, chopping board, bowl, butter
knife, small chef’s knife, large chef’s knife,
spoons, forks, whisk
Example sequence from the salad dataset:
[start, cut lettuce, place lettuce into
bowl, cut tomato, place tomato into bowl,
cut cucumber, place cucumber into bowl,
cut cucumber, place cucumber into bowl,
add salt, add pepper, serve salad onto
plate, end]
Sandwich Dataset
• There were 18 unique actions in the dataset.
• Maximum sequence length was 24 actions.
Users were provided with the following:
• Ingredients: bread, peanut butter, jam
• Utensils: plate, chopping board, bowl, butter
knife, small chef’s knife, large chef’s knife,
spoons, forks, whisk
Example sequence from the sandwich dataset (PB
refers to peanut butter):
[start, place PB onto bread 1, spread
PB onto bread 1, place PB onto bread 1,
spread PB onto bread 1, place PB onto
bread 2, spread PB onto bread 2, place
PB onto bread 2, spread PB onto bread
2, place PB onto bread 2, spread PB
onto bread 2, place jam onto bread 1,
spread jam onto PB on bread 1, put bread
together, serve sandwich onto plate, end]
3.2 LLMs for Prediction
In typical machine learning approaches, it is compu-
tationally expensive to retrain the prediction models
on every new demonstration as it becomes available.
To generalize preference-based sequence prediction,
we leverage the LLM’s few-shot and zero-shot rea-
soning capabilities. Specifically, we explore differ-
ent forms of context by providing the LLM with task-
specific training examples, including sequences from
other participants as well as previously seen examples
from the test set. Prior analysis of the meal prepa-
ration datasets (Chen, 2023) showed the majority of
participants behave consistently across their multiple
attempts. Thus, by gradually introducing the test par-
ticipant’s own prior sequences, the LLM will be able
to use these prior sequence as context for prediction
of unseen data.
The raw dataset annotations use underscores
instead of spaces for use in the other meth-
ods (“serve salad onto plate” for example is
“serve salad onto plate”). Initial experiments used
the raw annotations with underscores as input to the
LLM. However, the final method included prepro-
cessing steps for reducing the number of input tokens:
the underscores were removed, and all actions in a se-
quence were combined into a single string separated
by commas, rather than a list of individual strings.
This preprocessing has a negligble effect on accuracy
but had around a 40% decrease in input tokens.
We start by giving the LLM context about the goal
of the task:
“I am going to ask you to predict the next ac-
tion in a salad making sequence.”
To replicate how traditional machine learning
methods would train the model, we initially provided
the sequences for all participants, called context par-
ticipants, except for one held-out test participant. We
define context participants as any participants that are
not the test participants whose sequences are provided
to the LLM to build context. Note that in our meth-
ods, there are always N-1 context participants, but the
number can be varied in other applications. Provid-
ing all sequences from all the context participants had
an unrealistic amount of input tokens at every predic-
tion step, since API calls do not retain context mem-
ory as in ChatGPT and other LLM chat interfaces.
This would lead to millions of context tokens which
is costly, and also not sustainable as new sequences
might appear and eventually exceed the context to-
ken limit. Additionally, some participants’ behav-
iors may introduce noise rather than helpful patterns,
and such a large number of sequences may introduce
causal confusion (de Haan et al., 2019), reducing pre-
diction accuracy. Since LLMs are known to excel at
zero-shot and few-shot reasoning tasks (Kojima et al.,
2023; Brown et al., 2020), we then explored the im-
pact of providing different and more limited amounts
of prior context at each call.
One approach, termed Shared Context (LLM-
SC) and illustrated in Figure 2, leverages the few-
shot reasoning capabilities of LLMs. In this approach,
we experimented with providing either one or two
randomly selected sequences per context participant
to the LLM (called LLM-SC1 or LLM-SC2, respec-
tively). This ensures that the LLM receives a di-
verse set of examples to generalize the sequential pat-
terns from the dataset. Providing the sequences of
other participants may help to uncover patterns such
as “place (vegetable) into bowl” frequently follow-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
522
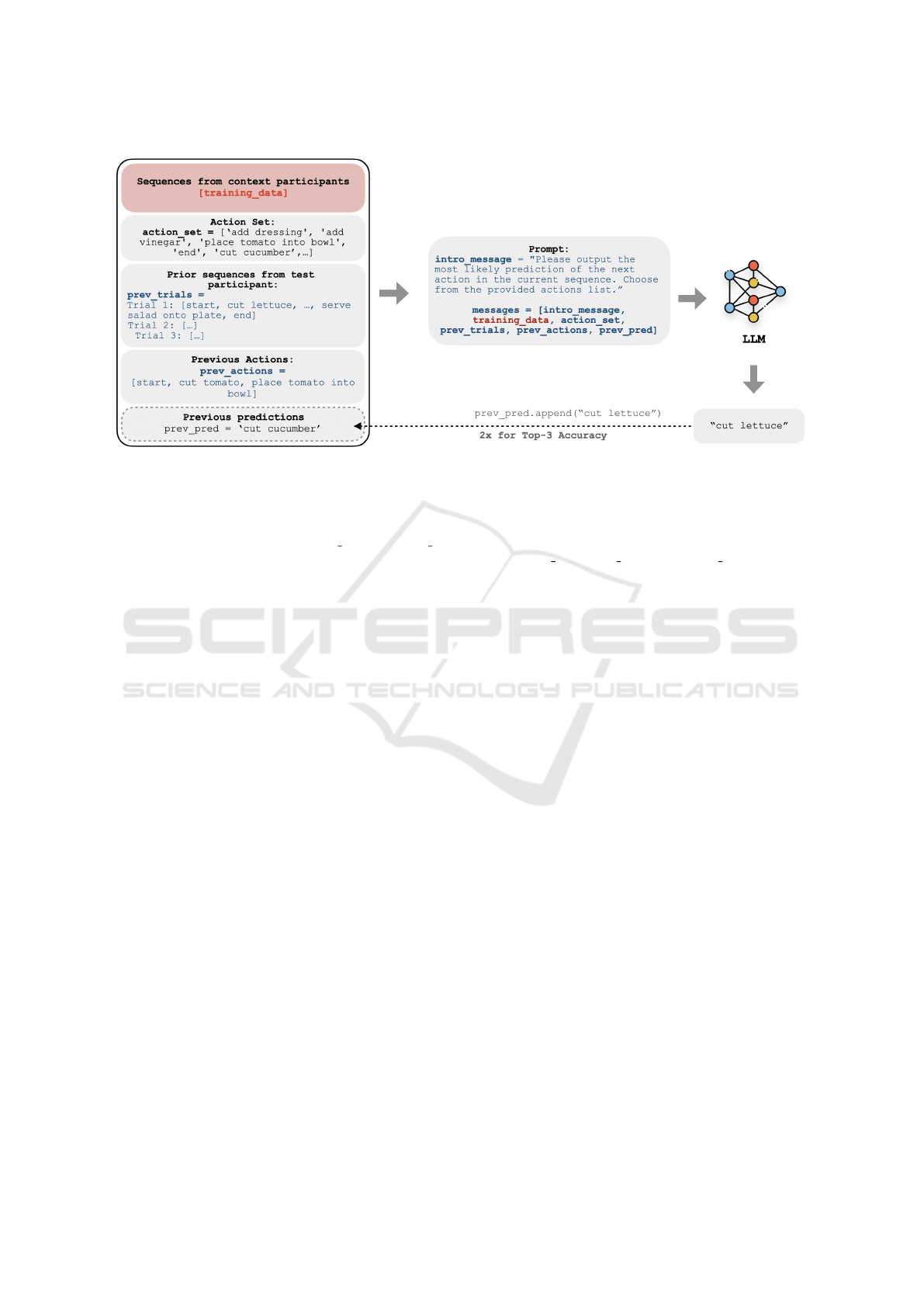
Figure 2: This diagram illustrates all three of the approaches to the LLM methods: Independent Context, Shared Context with
one sequence per context participant, and Shared Context with two sequences per context participant. This process shown in
the diagram is repeated at every action timestep. The API is called three times per action to obtain the Top-3 accuracy. The
previous predictions list is for recording the previous outputs corresponding to first, second, and third most likely predictions.
Note that the red box representing the sequences from context participants is only applicable to the Shared Context methods.
For a given test participant, the training data and action set variables remain fixed across all calls. Additionally, on the first
prediction of the first action of the first sequence of the test participant, prev trials, prev actions, and prev pred will all be
empty.
ing “cut (vegetable)” or “end” frequently following
“serve salad onto plate”. Consequently, this method
allows the LLM to better predict unseen sequences
without being distracted by excessive or redundant
data as in providing all the sequences per context par-
ticipant.
The alternative approach, referred to as Indepen-
dent Context (LLM-IC), tests the minimum amount
of context the LLM requires to make accurate predic-
tions by using sequences from only the test participant
as context (see Figure 2). Even if the test participant
doesn’t perform the exact same order of actions on
each of their five sequences, the general action pat-
terns will still likely hold and be useful for the LLM
to reference. For example, if a participant likes to pre-
pare the vegetables, then cheese, then dressing last,
the LLM would predict cheese-related actions before
dressing actions if it had some prior context about that
participant’s preference towards doing that. The ratio-
nale behind this approach was that by providing only
a minimal amount of context specific to the test par-
ticipant, the model’s predictions would focus more on
the unique patterns of that participant. This would
reduce the influence of other participants’ sequences,
which could introduce noise.
In both methods, we provided the action bank for
the LLM to choose from, since the first test sequence
has no other sequences to reference on what actions
are allowed. Another key input is the entire list of pre-
vious actions (from a
0
to a
t
) that had occurred in the
test sequence prior to the one being predicted (a
t+1
).
Earlier iterations of the prompt provided just the sin-
gle previous action (a
t
), but this method showed poor
results, due to the lack of full context of what had pre-
viously occurred in the sequence.
Our analysis of different prompts showed that the
LLM would sometimes output actions outside of the
action set, unnecessarily wordy responses, or nonsen-
sical predictions given the context, even with the tem-
perature set to 0. As a result, our final prompts also
made specifications about the format of the output:
“Choose from the provided actions list with
no other extraneous words or phrases. Your
response should be a maximum of W words.”
where W was the number of words in the longest an-
notation in the dataset.
Lastly, classification methods typically consider
a Top-N accuracy when evaluating learning perfor-
mance (Deshpande and Karypis, 2004; Tang and
Wang, 2018). This is particularly relevant for our ap-
plication to meal preparation, since more than just the
top prediction is valuable. In the case of the salad-
making task for example, the top prediction after
“start, cut tomato, place tomato into bowl” could be
“cut cucumber” when the next true action was “cut
lettuce”. In this case, “cut cucumber” would have
still been a valuable suggestion because it aligns with
sequential logic: the prediction continues the veg-
Leveraging Large Language Models for Preference-Based Sequence Prediction
523

etable preparation phase, the test participant hasn’t
cut the cucumber yet, and the prediction brings them
closer to task completion. Thus, Top-N accuracy cap-
tures the variation in possibilities for what the next
step might be, which is differentiated by preferences.
We query the API three separate times per action
to obtain the top three predictions. The separate calls
while providing the most likely, second most likely,
etc. returned from previous calls acts as a chain-of-
thought process which has been shown to improve
performance on reasoning tasks (Wei et al., 2023) and
indeed resulted in better accuracy over querying the
LLM a single time for the top three most likely pre-
diction all at once.
We iterate over all N participants in the dataset
leaving one-subject-held-out. We use the five se-
quences from the held-out participant as test se-
quences, testing from Seq. 1 to Seq. 5. For each ac-
tion (a) within the i-th sequence, the LLM is queried
at every timestep t three times to predict the Top-3
most likely predictions of the next action (a
t+1
) given:
• Previous Actions. All previous actions a
0
to a
t
• Action Bank. The action bank containing all pos-
sible actions for the LLM to choose from.
• Previously Seen Sequences. Previously seen se-
quences of the current test participant (Seqs. 1 to
i -1).
• Other Participants’ Sequences. Applies only
for Shared Context approaches. 1 or 2 sequences
per context participant (excluding the test partic-
ipant) are randomly chosen. For a dataset with
N total participants, this results in either N − 1
(LLM-SC1) or 2(N − 1) (LLM-SC2) context par-
ticipants’ sequences, depending on the shared
context approach.
• Previous Predictions. Applies for the second and
third calls to the LLM to predict the second and
third most likely predictions to obtain the Top-3
results
Refer to the project webpage
1
for the full prompts
used in each of these methods.
In summary, here are the three versions to this ap-
proach for using LLMs for action prediction:
• Independent Context (LLM-IC) Each partici-
pant is treated independently without considering
sequences from context participants. The API is
called to predict the next action based solely on
the actions within the current sequence and if ap-
plicable, the test participant’s previous sequences.
1
sites.google.com/view/preference-based-prediction
• Shared Context (LLM-SC1, 1 Sequence per
Context Participant) One sequence from each of
the context participants is included in the context.
These sequences are randomly selected per partic-
ipant, providing the model with additional infor-
mation about potential action patterns from differ-
ent sources.
• Shared Context (LLM-SC2, 2 Sequences per
Context Participant) This approach extends the
shared context by including two sequences from
each other participant, also randomly selected.
Refer to Figure 2 for an illustration of these LLM
methods.
3.3 Baseline Methods
3.3.1 Aggregate LSTM
As a benchmark for the LLM method, we evaluated
the performance of an Aggregate Long Short-Term
Memory (Agg. LSTM) network. We mapped both
datasets’ textual annotations to numeric values rep-
resenting each action and used a sliding-window ap-
proach with a window size of 5 actions. For each win-
dow, a state vector was created, incremented at the in-
dices corresponding to the actions, normalized, and
appended to the feature vector (moving window x).
The next action following the window was recorded
as the label (moving window y). These feature-label
pairs were then aggregated into a training set.
To determine the optimal parameters for the
LSTM, a grid search was performed on the salad
dataset, testing different values of the LSTM hidden
size, number of LSTM layers, and learning rate. The
values tested for each of these hyperparameters and
corresponding accuracy results are shown in Table 1.
Based on the results from the grid search, we used the
following parameters for the LSTM architecture:
• LSTM hidden size = 16
• Number of LSTM layers = 1
• Four fully-connected layers: Sizes 4× 128, 128×
256, 256 × 64, and 64 × num classes (18 for both
of our datasets)
• Activation function = ReLU
• Loss function = Cross-Entropy
• Optimizer = Adam
• Number of epochs = 5000
• Learning rate = 0.001
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
524
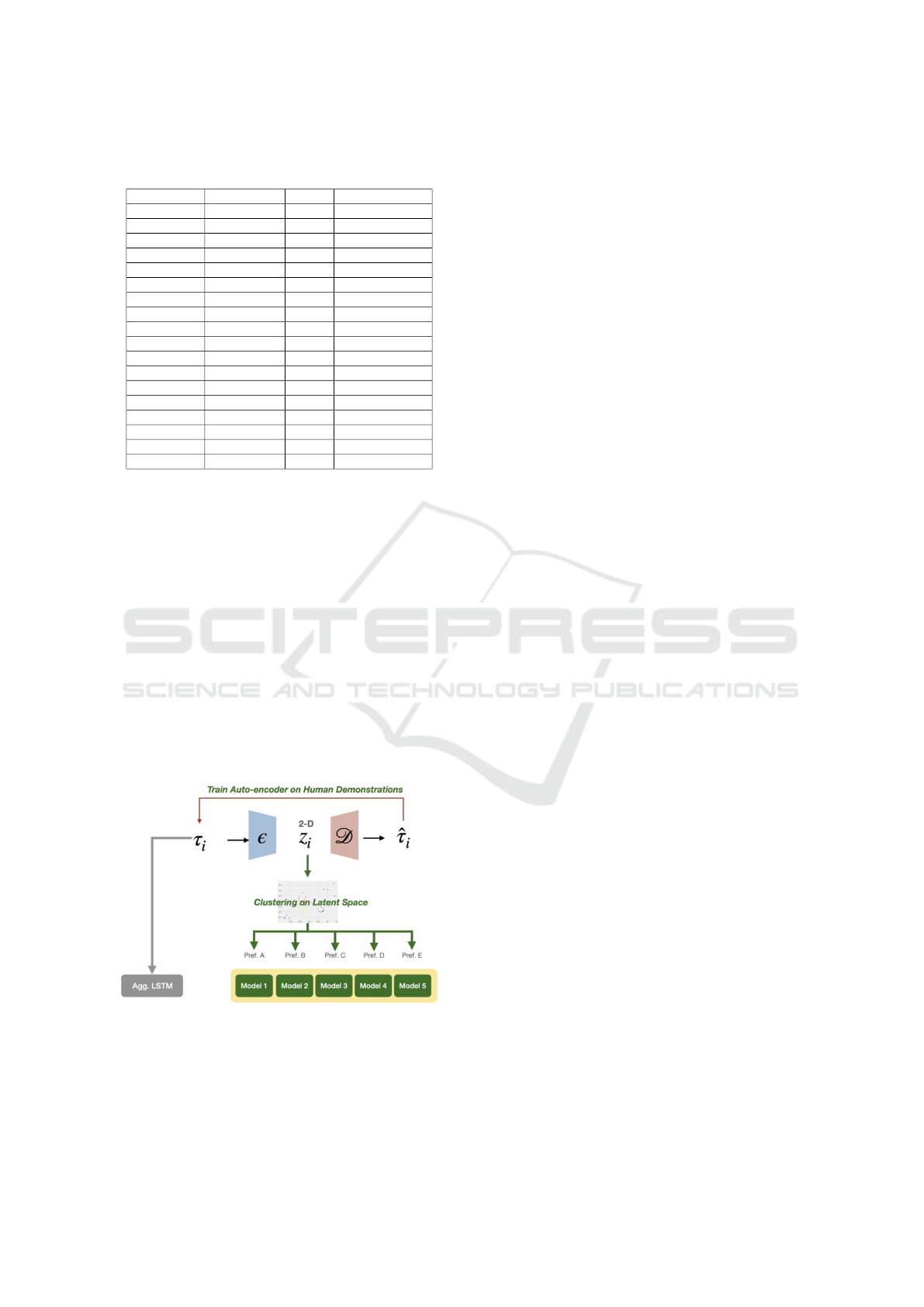
Table 1: Grid Search Results for LSTM Hyperparameters
on the Salad Dataset (Exact Accuracy Only).
Hidden Size Num Layers LR Exact Accuracy
4 1 0.0001 49.0%
4 1 0.001 51.4%
4 1 0.01 51.1%
4 2 0.0001 49.5%
4 2 0.001 52.2%
4 2 0.01 51.2%
8 1 0.0001 52.3%
8 1 0.001 56.8%
8 1 0.01 56.5%
8 2 0.0001 54.0%
8 2 0.001 53.2%
8 2 0.01 53.2%
16 1 0.0001 54.5%
16 1 0.001 57.0%
16 1 0.01 55.5%
16 2 0.0001 53.4%
16 2 0.001 55.0%
16 2 0.01 55.1%
3.3.2 Mixture-of-Experts
Autoencoder to Extract Preferences. The
mixture-of-experts (MoE) model uses an autoencoder
to identify the different strategies in the dataset. To
prepare the sequence data for the autoencoder, all se-
quences were padded with end markers to match the
length of the longest sequence, ensuring consistent
input sizes. Each sequence was then converted into
a tensor of dimensions 1 × 1 × (A × L), where A is
the number of possible actions and L is the longest
sequence in the dataset.
The autoencoder was trained to extract a 2D la-
tent space representation of the sequences using the
Mean Squared Error loss function, Adam optimizer,
a learning rate of 0.001, and 100 epochs. K-Means
Figure 3: Overview of the Mixture of Experts (MoE) ap-
proach compared to the Aggregate LSTM (Chen, 2023).
An autoencoder compresses trajectories (τ
i
) into a 2D latent
space (z
i
), followed by clustering to identify distinct strate-
gies. An expert model is trained for each cluster, while the
aggregate LSTM is trained on the entire dataset without dif-
ferentiation.
clustering (K = 5) was applied to the latent space,
with the number of clusters determined by silhouette
score analysis. These clusters reflect distinct strate-
gies participants used to complete tasks. For example,
in the salad dataset, one cluster represents sequences
where vegetables and dressing are prepared in paral-
lel, while another shows a sequence of preparing veg-
etables first, then cheese, then dressing. Similarly, in
the sandwich dataset, one cluster represents spread-
ing peanut butter on both slices before jelly, while an-
other corresponds to spreading peanut butter on one
slice and jelly on the other.
Training the Experts for Prediction. Each se-
quence in the training data was assigned to a cluster
based on its strategy, and five separate LSTMs were
trained using the same process and hyperparameters
as the aggregate LSTM, with each LSTM focusing
only on sequences within its corresponding cluster.
This allows each LSTM to specialize in predicting se-
quences of a specific strategy. To ensure a fair com-
parison with the aggregate LSTM, which is trained on
all sequences except for the test participant, we gen-
erated synthetic data to augment the smaller training
sets of the expert LSTMs. The synthetic data was cre-
ated by calculating a probability matrix of action tran-
sitions within each cluster and generating sequences
based on the most likely actions (Chen, 2023). While
these synthetic sequences don’t include repeated ac-
tions, they still capture the core sequential patterns of
each cluster, helping the expert LSTMs to match the
data scale of the aggregate LSTM.
To effectively leverage the expert predictors, we
first identify which cluster an unknown participant
belongs to by maintaining a running belief vector.
This belief vector is initialized with equal probabil-
ities across all 5 clusters. For each action, the outputs
from all 5 expert predictors are compared to the actual
action taken, and the belief vector is updated using a
Bayesian update rule.
During evaluation, the expert predictor corre-
sponding to the highest belief is used to predict the
next action. If there’s a tie, the lowest-numbered strat-
egy is selected. The Bayesian update allows the be-
lief vector to adapt over time, enabling the model to
adjust if a participant shifts strategies during the task.
This continuous belief update process ensures that the
model remains responsive to changing patterns in the
participant’s actions.
Leveraging Large Language Models for Preference-Based Sequence Prediction
525
4 RESULTS
The evaluation process involved leave-one-subject-
out, testing on the 5 sequences of the held-out subject.
The performance of each method was averaged over
all test participants. All of the models predict the next
action, one action at a time.
Two accuracy metrics are used:
• Top-1 Accuracy. The number of times the most
likely predicted action matches the actual next ac-
tion, divided by the total number of actions.
• Top-3 Accuracy. The number of times the correct
action is within the top three predicted actions, di-
vided by the total number of actions.
We used OpenAI’s GPT-4o model (OpenAI,
2024) for running all of the LLM experiments.
Top-1 Accuracy Results
Table 2: Salad Dataset Top-1 Accuracy of Different Meth-
ods Across Sequences.
Model Seq. 1 Seq. 3 Seq. 5
Agg. LSTM 54.5% ± 0.1% 55.3% ± 1.6% 52.3% ± 2.0%
MoE 56.9% ± 2.6% 53.7% ± 2.5% 54.2% ± 2.3%
LLM-IC 53.9% ± 3.1% 83.6% ± 1.1% 86.1% ± 0.5%
LLM-SC1 64.2% ± 1.3% 76.0% ± 3.3% 79.9% ± 2.8%
LLM-SC2 64.1% ± 1.7% 77.0% ± 0.8% 82.4% ± 2.4%
Table 3: Sandwich Dataset Top-1 Accuracy of Different
Methods Across Sequences.
Model Seq. 1 Seq. 3 Seq. 5
Agg. LSTM 69.1% ± 0.6% 66.0% ± 1.3% 56.8% ± 1.6%
MoE 68.7% ± 3.0% 70.3% ± 3.8% 67.6% ± 1.5%
LLM-IC 51.1% ± 5.1% 81.0% ± 2.9% 82.1% ± 0.7%
LLM-SC1 61.3% ± 2.5% 75.6% ± 1.4% 74.8% ± 0.4%
LLM-SC2 60.6% ± 3.2% 76.4% ± 5.0% 74.8% ± 1.9%
Recall that Seq. n refers to the n-th sequence that the
participant performed in the study. The order of se-
quences is maintained during evaluation, with Seq. 1
tested first and Seq. 5 tested last. Seq. n has con-
text on Seq. 1 to Seq. (n − 1). In Tables 2 and 3, we
observe that LLM-IC consistently outperforms other
approaches in the later sequences (Seq. 3 and Seq. 5)
for both datasets in the Top-1 accuracy metric. In the
salad dataset, LLM-IC achieves a Top-1 accuracy of
86.1% on Seq. 5, outperforming the aggregate LSTM
by 33.8% and the MoE method by 31.9% (Table 2).
LLM-IC also surpasses other LLM-based meth-
ods in later sequences. For instance, in Seq. 5 of
the salad dataset (Table 2), LLM-IC achieves 86.1%,
which is 6.2% and 3.7% higher than LLM-SC1 and
LLM-SC2, respectively. A similar trend is seen in the
sandwich dataset (Table 3), where LLM-IC reaches
82.1% in Seq. 5, outperforming both LLM-SC1 and
LLM-SC2 by 7.3%. Additionally, LLM-IC outper-
forms the aggregate LSTM by 25.3% and the MoE by
14.5% in Seq. 5 (Table 3), highlighting the strength
of this method over the baseline methods in later se-
quences.
In the early sequences (Seq. 1) however, the LLM
Shared Context (LLM-SC1 and LLM-SC2) methods
outperform other models in the salad dataset. LLM-
SC1 achieves 64.2% and LLM-SC2 achieves 64.1%,
both outperforming all other methods in Seq. 1 by
7-10% (Table 2). However, in the sandwich dataset
(Table 3), the aggregate LSTM achieves the highest
accuracy on Seq. 1 of 69.1%, with MoE following
closely at 68.7%. The baseline methods continue with
a similar level of accuracy in later sequences but are
surpassed by the LLM methods. Also, it is important
to point out the strength of the baseline methods in
Seq. 1 can be expected, since the baseline methods
have been trained on n − 1 participants’ training data
(80 sequences) rather than the LLM methods which
have only been given 0, 16, or 32 prior sequences for
LLM-IC, LLM-SC1, and LLM-SC2, respectively by
that point.
Top-3 Accuracy Results
Table 4: Salad Dataset Top-3 Accuracy of Different Meth-
ods Across Sequences.
Model Seq. 1 Seq. 3 Seq. 5
Agg. LSTM 75.1% ± 1.5% 75.4% ± 2.7% 74.1% ± 2.2%
MoE 82.1% ± 2.9% 76.8% ± 0.3% 76.6% ± 2.8%
LLM-IC 74.6% ± 0.8% 91.4% ± 0.9% 95.0% ± 0.9%
LLM-SC1 80.2% ± 1.5% 82.3% ± 2.2% 85.9% ± 3.4%
LLM-SC2 80.5% ± 0.4% 83.9% ± 1.2% 88.5% ± 1.6%
Table 5: Sandwich Dataset Top-3 Accuracy of Different
Methods Across Sequences.
Model Seq. 1 Seq. 3 Seq. 5
Agg. LSTM 90.6% ± 1.6% 92.0% ± 1.5% 85.1% ± 0.7%
MoE 91.2% ± 1.8% 90.1% ± 0.9% 86.8% ± 2.0%
LLM-IC 69.1% ± 4.4% 90.5% ± 3.3% 89.0% ± 1.8%
LLM-SC1 75.5% ± 4.6% 86.3% ± 3.4% 85.4% ± 0.6%
LLM-SC2 74.5% ± 1.9% 86.3% ± 2.1% 86.0% ± 0.6%
In the salad dataset (Table 4), the LLM-IC method
demonstrates strong performance in Seq. 3 and 5,
achieving Top-3 accuracies of 91.4% and 95.0%, re-
spectively. Notably, the gap between Top-1 (Table 2,
3) and Top-3 accuracy (Table 4, 5) for LLM-IC is less
than 10% in Seq. 3 and Seq. 5 for both datasets, in-
dicating that the correct action is often ranked as the
most likely prediction. LLM-SC1 and LLM-SC2 also
show smaller gaps between Top-1 and Top-3 accuracy
in the salad dataset, with differences of around 6% in
Seq. 3 and 5 (Table 2, 4), further supporting the preci-
sion of LLM-based predictions. In contrast, the base-
line methods exhibit larger discrepancies, with dif-
ferences between Top-1 and Top-3 accuracy ranging
from 20-25%.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
526

Moreover, in the sandwich dataset, the MoE
method starts with the highest Top-3 accuracy in Seq.
1 at 91.2%, but its performance declines in later se-
quences, dropping to 86.8% by Seq. 5. In con-
trast, LLM-IC begins with a lower Top-3 accuracy of
69.1% in Seq. 1 but surpasses MoE by Seq. 3, reach-
ing 90.5%, and maintains this advantage in Seq. 5.
This declining accuracy between Seq. 3 and 5 oc-
curs for all methods in the sandwich dataset (Table
5). However the decrease in accuracy of the baseline
methods between Seq. 3 and Seq.5 is 6.9% and 3.3%
for aggregate LSTM and MoE, respectively, while the
difference is only 1.5% for LLM-IC, 0.9% for LLM-
SC1 and 0.3% for LLM-SC2.
5 DISCUSSION
Accuracy on Later Sequences. The LLM Inde-
pendent Context (LLM-IC) method demonstrated up
to 33.8% greater accuracy than other methods when
testing on Seq. 5. This notable improvement high-
lights the LLM’s ability to quickly adapt its prediction
model to individual participant preferences with min-
imal data. The model excels in environments where
participants exhibit consistent behavior patterns, even
in cases involving outlier participants. The LLM-IC
method performs well on later sequences compared
to Seq. 1 because it only uses the current test partici-
pant’s previous sequences for context.
The strength of the LLM methods can be observed
particularly in the jump in accuracy from Seq. 1 to
Seq. 3. For example, in the sandwich dataset, the
baseline methods outperformed the LLM methods on
Seq. 1 (Table 3). However, on Seq. 3, the LLM meth-
ods surpass baseline methods by 5.3%-15.0%. The
improved performance of the LLM methods over the
aggregate LSTM and MoE methods can be attributed
to the fact that the latter two methods cannot change
their prediction model at test time, whereas the LLM
method can use the test participant’s prior sequences
to inform the future predictions. While this isn’t the
same as updating the model parameters, it is able to
incorporate new information on the test participant’s
strategy, while the aggregate LSTM and MoE meth-
ods can only rely on the strategies that already existed
in the training set. This can be seen in the results from
both datasets, where both the aggregate LSTM and
MoE methods have a static or even downward trend
between Seq. 1 to Seq. 5, while all three of the LLM
methods have an overall upward trend from Seq. 1.
In Seq. 3 and Seq. 5 for both datasets (Table
2 and 3), the LLM-IC method consistently outper-
forms all other approaches in Top-1 accuracy, includ-
ing the other LLM-based methods. This superior per-
formance is likely due to LLM-IC’s ability to leverage
the increasing amount of information about the test
participant in later sequences, which allows it to make
more informed predictions. In contrast, although the
LLM Shared Context (LLM-SC) methods also gain
access to more of the test participant’s sequences over
time, the addition of sequences from other partici-
pants acts as noise. This noise makes the predictions
less focused on the test participant’s specific prefer-
ences, reducing accuracy.
In the sandwich dataset, there was a noticeable
decrease in Top-3 accuracy across all methods be-
tween Seq. 3 and Seq. 5 (Table 5), indicating
that participants began to deviate from the strate-
gies they followed in earlier trials. Despite this de-
crease, providing context from prior trials consis-
tently outperformed Seq. 1 results for all of the
LLM methods, but not for the baseline methods. No-
tably, LLM-IC demonstrated significantly better per-
formance compared to other methods on Seq. 5 (Ta-
ble 3). While baseline methods showed a consistent
downward trend in accuracy from Seq. 1 to Seq. 5 in
both datasets (Table 4, 5) —likely due to their inabil-
ity to adapt to participants’ evolving strategies—the
LLM methods exhibited an upward trend, highlight-
ing their superior adaptability to changing patterns.
Performance on Unseen Data. When testing on
completely unseen data (Seq. 1), the LLM Shared
Context (LLM-SC1 and LLM-SC2) methods outper-
formed all other methods in Top-1 accuracy in the
salad dataset. This indicates that the salad making
task has more variations in strategy which the aggre-
gate LSTM cannot capture with the single model, but
existing salad-making priors in the LLM can distin-
guish those.
On the other hand, it seems that the aggregate
LSTM and MoE were able to capture the patterns for
the sandwich task quite effectively (Table 3, 5), likely
because making a peanut butter and jelly sandwich
has fewer possible strategies and a smaller action
space. The better performance of the baseline meth-
ods over the LLM methods in the sandwich dataset on
Seq. 1 (Table 3), indicates that these methods could
be suitable for simpler meal preparation tasks with a
small action space, limited number of possible strate-
gies, and when there’s little prior information avail-
able about the participants’ previous sequences. Thus,
our LLM methods are ideal candidates for general use
such as assisting with a variety of recipes, more com-
plicated meal preparation tasks involving more varia-
tion in preferences, or when there is prior information
available about the user’s previous preferences.
Leveraging Large Language Models for Preference-Based Sequence Prediction
527
By directly leveraging the sequences from other
participants in LLM-SC1 and LLM-SC2, the model
is able to more effectively learn the general patterns
as well strategies that exist for the task. The shared
context allows the LLM to generalize better to new
participants and unseen data. We can see this by com-
paring the LLM-SC1 and LLM-SC2 average accu-
racy on Seq. 1 with that of the LLM-IC. LLM-SC1
and LLM-SC2 outperforms LLM-IC significantly on
Seq. 1 for both datasets. Thus, the context pro-
vided by other participants proves to be useful when
there are no prior sequences available from the cur-
rent test participant. The tradeoff in prediction ac-
curacy between the LLM-IC method and LLM-SC
methods over the trials shows that there may be some
room for overall improvement by leveraging a mix of
both strategies: providing sequences from other par-
ticipants when prior sequences of the test participant
are unavailable, then removing the other participant
sequences as context once the test participant’s prior
sequence can be referenced.
Overall, the LLM methods exhibit significant im-
provements in prediction accuracy over the baseline
methods, as shown in the Seq. 3 and Seq. 5 accu-
racies. LLM-IC shows adaptation to personal pref-
erences with minimal data, while LLM-SC excels in
predicting actions in completely unseen data. These
findings underscore the effectiveness of LLMs in en-
hancing action prediction through prior information
about their preferences towards a certain strategy.
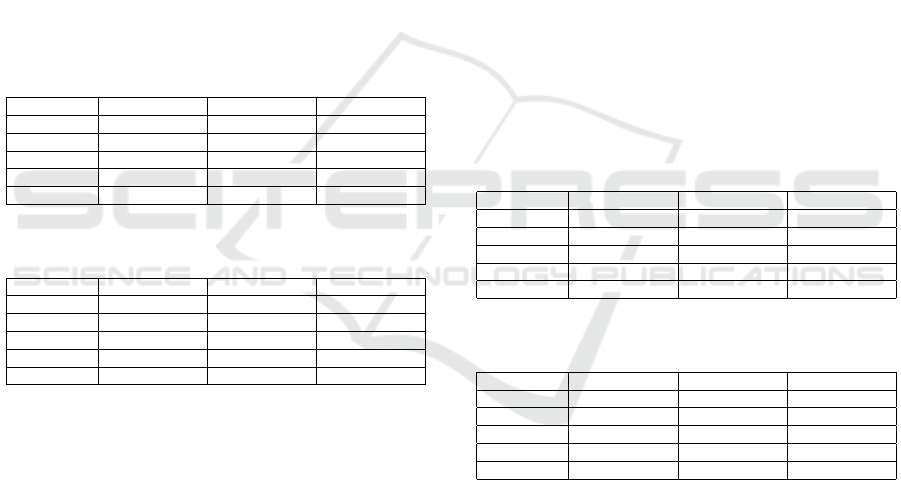
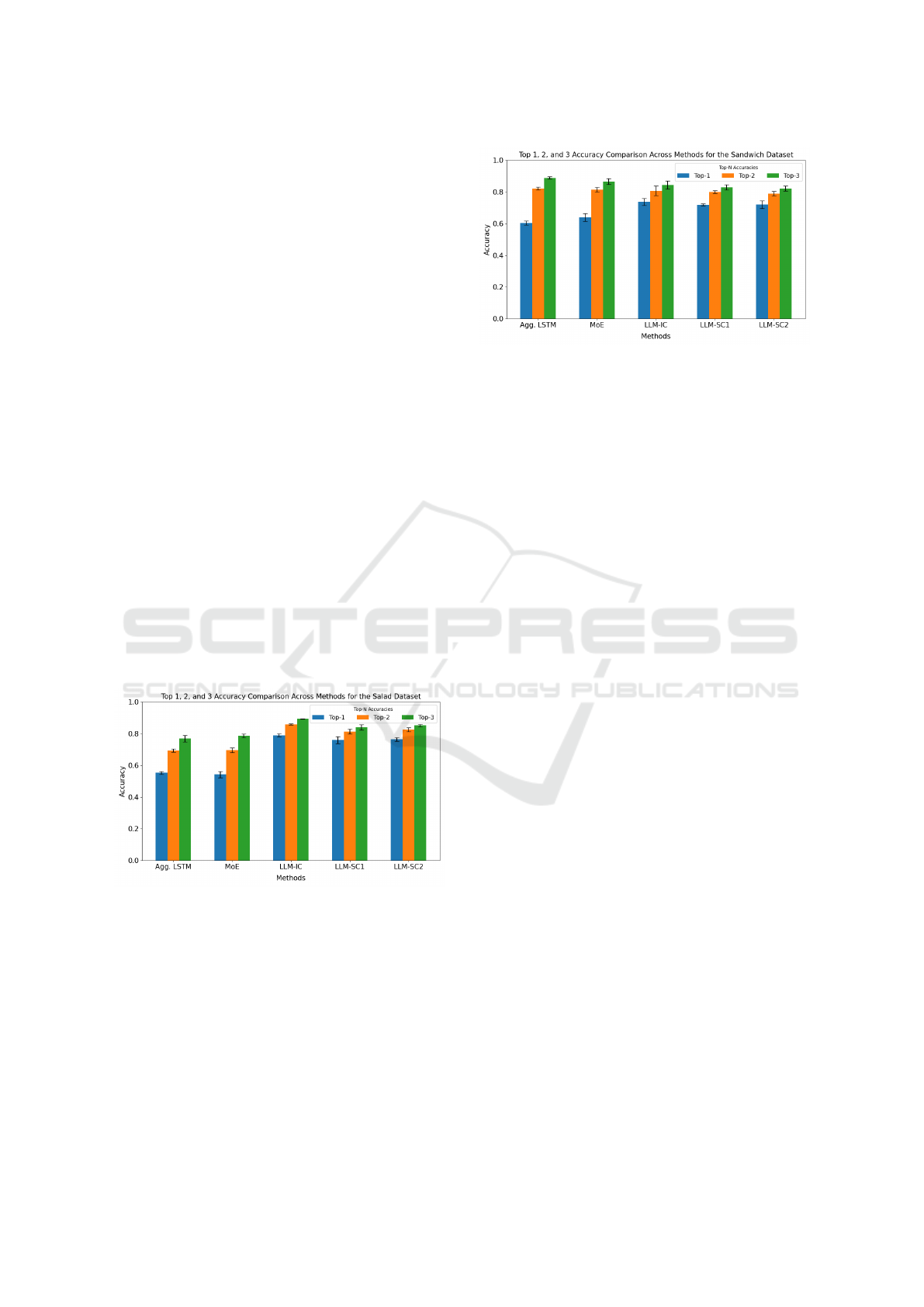
Figure 4: Comparison of average overall Top-1 to Top-3
accuracy for all five different methods for the Salad Dataset.
Top-N Accuracy Comparison. Figures 4 and 5
compares the Top-N results. For both datasets, the
LLM-based methods (LLM-IC, LLM-SC1, LLM-
SC2) show a smaller difference between the Top-1,
Top-2, and Top-3 accuracy compared to the baseline
methods (aggregate LSTM, MoE). In particular, the
accuracy gains from Top-1 to Top-2 and Top-2 to Top-
3 are smaller, indicating that the LLM methods are
predicting the correct action as the most likely predic-
tion more often than the baseline methods. The base-
Figure 5: Comparison of average overall Top-1 to Top-3
accuracy for all five different methods for the Sandwich
Dataset.
line methods in both dataset have a large gap between
Top-1 and Top-2 prediction accuracy and a smaller
gap between Top-2 and Top-3, indicating that these
are predicting the correct action mostly as the first and
second most likely predictions.
This comparison of Top-N accuracies demon-
strates the tradeoff between computational efficiency
and different accuracy metrics. In the sandwich
dataset (Figure 5), the Top-3 accuracies across all
methods is similar. Thus, from a deployment stand-
point, even the baseline methods can be considered if
the Top-3 accuracy is the chosen metric for the spe-
cific sandwich-making task. However, the Top-3 re-
sults from the salad dataset are less consistent across
methods. The LLM methods outperform the baseline
methods for all three Top-Ns (Figure 4), indicating
that there must be different considerations made for
accuracy metrics and methods used in deployment de-
pending on the dataset.
Generalization to Other Cooking Domains. The
similarity in overall trends from both the salad dataset
and sandwich dataset indicate that the LLM methods
can generalize to multiple cooking domains. Making
a salad or a peanut butter and jelly sandwich are rel-
atively common meal preparation tasks and are likely
described in numerous online recipes, tutorials, and
articles. This makes it likely that the LLM has been
exposed to a diverse set of examples of ways to make
the same dish. As a result, the model has developed
robust priors that we can leverage effectively to gener-
alize sequence prediction for a variety of meal prepa-
ration tasks with different preferences.
6 FUTURE WORK
One interesting next direction would be an LLM
Adaptive Context approach, combining the LLM-IC
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
528

method and LLM-SC methods to further improve pre-
diction performance. We could use the LLM-SC
method on Seq. 1-2 then switch to LLM-IC on the
remaining sequences. By leveraging the ability of the
LLM-SC method to perform well on completely un-
seen data (Seq. 1) and the strength of the LLM-IC on
later sequences, we can develop an even more robust
prediction system that can quickly adapt to a user’s
preferences towards making a meal.
Another way to strengthen the performance of
LLM methods during Seq. 1 testing (when no prior
sequences are available) is to use the aggregate LSTM
to generate a reference sequence. This generated se-
quence can then be provided to the LLM methods as
context, serving a similar role to prior participant data
in cases where such data is not yet available. The
strength of the aggregate LSTM method on the sand-
wich dataset in particular makes this a promising next
step to improve the LLM method performance with-
out prior participant data.
Future work will consist of using these prediction
methods that we presented in this paper to contribute
to a robust assistive system to help older adults with
meal preparation. We have seen that our prediction
methods are improved when informed by prior con-
text about a user’s preferences, so this will be lever-
aged to provide meaningful assistance that aligns with
how they want to complete the task and how they
would like to be assisted. The assistive system will
provide feedback in the form of verbal cues to pro-
vide useful feedback while still maintaining the user’s
confidence and autonomy.
7 CONCLUSION
In this work, we presented a novel approach to lever-
aging Large Language Models (LLMs) for action pre-
diction in cooking sequences, with a focus on tailor-
ing predictions based on user preferences. The pri-
mary contributions of this work are as follows: First,
we introduced the use of LLMs for personalized ac-
tion prediction, incorporating OpenAI’s GPT-4 model
to demonstrate how LLMs can effectively predict the
next action in a sequence by using the user’s previous
actions as context. This method outperformed base-
line models, such as aggregate LSTM and mixture-of-
experts models, due to the LLMs’ ability to adapt with
minimal prior context. We also compared various
contextual approaches, evaluating three distinct meth-
ods—Independent Context (LLM-IC), Shared Con-
text with one sequence per context participant (LLM-
SC1), and Shared Context with two sequences per
context participant (LLM-SC2). This comparison re-
vealed the strengths of each approach, with the Shared
Context methods particularly excelling in predictions
for unseen participants. Additionally, we demon-
strated that the five methods tested, including the
LLM approaches, could be generalized to other cook-
ing domains, such as the salad and sandwich datasets.
The LLM methods were especially effective due to
the vast amount of cooking-related information avail-
able in the training data and the robust reasoning ca-
pabilities of the models. Finally, our results showed
significant improvement over baseline methods, with
LLM methods—especially the Independent Context
approach—achieving up to 33.8% higher accuracy
in later sequences, highlighting the effectiveness of
LLMs in quickly and effectively adapting to individ-
ual preferences, even with limited data.
This work shows promising potential for helping
to develop assistive technologies for those who strug-
gle with meal preparation. By integrating our ap-
proach, such technologies can offer meaningful, per-
sonalized assistance. This can empower older adults
to regain independence and confidence in this essen-
tial daily task, ultimately enhancing both their well-
being and quality of life.
ACKNOWLEDGEMENTS
This material is based upon work supported by
the National Science Foundation under Grant No.
2112633. We would like to thank Divya Gupta for
her work on annotating the sandwich dataset.
REFERENCES
Arenas, M. G., Xiao, T., Singh, S., Jain, V., Ren, A. Z.,
Vuong, Q., Varley, J., Herzog, A., Leal, I., Kirmani,
S., Sadigh, D., Sindhwani, V., Rao, K., Liang, J.,
and Zeng, A. (2023). How to prompt your robot: A
promptbook for manipulation skills with code as poli-
cies. In 2nd Workshop on Language and Robot Learn-
ing: Language as Grounding.
Bouchard, B., Bouchard, K., and Bouzouane, A. (2020).
A smart cooking device for assisting cognitively im-
paired users. Journal of Reliable Intelligent Environ-
ments, 6(2):107–125.
Brown, T. B., Mann, B., Ryder, N., Subbiah, M., Kaplan, J.,
Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G.,
Askell, A., Agarwal, S., Herbert-Voss, A., Krueger,
G., Henighan, T., Child, R., Ramesh, A., Ziegler,
D. M., Wu, J., Winter, C., Hesse, C., Chen, M., Sigler,
E., Litwin, M., Gray, S., Chess, B., Clark, J., Berner,
C., McCandlish, S., Radford, A., Sutskever, I., and
Amodei, D. (2020). Language models are few-shot
learners.
Leveraging Large Language Models for Preference-Based Sequence Prediction
529

Chan, S., Li, J., Yao, B., Mahmood, A., Huang, C.-M., Jimi-
son, H., Mynatt, E. D., and Wang, D. (2023). ”mango
mango, how to let the lettuce dry without a spinner?”:
Exploring user perceptions of using an llm-based con-
versational assistant toward cooking partner.
Chen, D. (2023). Learning task preferences from real-world
data. Master’s thesis, Carnegie Mellon University,
Pittsburgh, PA.
de Haan, P., Jayaraman, D., and Levine, S. (2019). Causal
confusion in imitation learning.
Deshpande, M. and Karypis, G. (2004). Item-based top-n
recommendation algorithms. ACM Trans. Inf. Syst.,
22(1):143–177.
Funk, M., Mayer, S., and Schmidt, A. (2015). Using in-situ
projection to support cognitively impaired workers at
the workplace. In Proceedings of the 17th Interna-
tional ACM SIGACCESS Conference on Computers &
Accessibility, ASSETS ’15, page 185–192, New York,
NY, USA. Association for Computing Machinery.
Hamada, R., Okabe, J., Ide, I., Satoh, S., Sakai, S., and
Tanaka, H. (2005). Cooking navi: assistant for daily
cooking in kitchen. In Proceedings of the 13th Annual
ACM International Conference on Multimedia, MUL-
TIMEDIA ’05, page 371–374, New York, NY, USA.
Association for Computing Machinery.
Hu, Z., Lucchetti, F., Schlesinger, C., Saxena, Y., Freeman,
A., Modak, S., Guha, A., and Biswas, J. (2024). De-
ploying and evaluating llms to program service mo-
bile robots. IEEE Robotics and Automation Letters,
9(3):2853–2860.
Johansson, M. M., Marcusson, J., and Wressle, E. (2015).
Cognitive impairment and its consequences in every-
day life: experiences of people with mild cognitive
impairment or mild dementia and their relatives. In-
ternational Psychogeriatrics, 27(6):949–958.
Kojima, T., Gu, S. S., Reid, M., Matsuo, Y., and Iwasawa,
Y. (2023). Large language models are zero-shot rea-
soners.
Kosch, T., Wennrich, K., Topp, D., Muntzinger, M., and
Schmidt, A. (2019). The digital cooking coach: using
visual and auditory in-situ instructions to assist cog-
nitively impaired during cooking. In Proceedings of
the 12th ACM International Conference on PErvasive
Technologies Related to Assistive Environments, PE-
TRA ’19, page 156–163, New York, NY, USA. Asso-
ciation for Computing Machinery.
Le, D. M., Guo, R., Xu, W., and Ritter, A. (2023). Improved
instruction ordering in recipe-grounded conversation.
Liang, J., Huang, W., Xia, F., Xu, P., Hausman, K., Ichter,
B., Florence, P., and Zeng, A. (2023). Code as poli-
cies: Language model programs for embodied control.
Lin, K., Agia, C., Migimatsu, T., Pavone, M., and Bohg,
J. (2023). Text2motion: from natural language in-
structions to feasible plans. Autonomous Robots,
47(8):1345–1365.
McGrattan, A. M., McEvoy, C. T., McGuinness, B.,
McKinley, M. C., and Woodside, J. V. (2018). Ef-
fect of dietary interventions in mild cognitive impair-
ment: a systematic review. British Journal of Nutri-
tion, 120(12):1388–1405.
Nemlekar, H., Modi, J., Gupta, S. K., and Nikolaidis, S.
(2021). Two-stage clustering of human preferences
for action prediction in assembly tasks. In 2021 IEEE
International Conference on Robotics and Automation
(ICRA), pages 3487–3494.
Nikolaidis, S., Ramakrishnan, R., Gu, K., and Shah, J.
(2015). Efficient model learning from joint-action
demonstrations for human-robot collaborative tasks.
In Proceedings of the Tenth Annual ACM/IEEE In-
ternational Conference on Human-Robot Interaction,
HRI ’15, page 189–196, New York, NY, USA. Asso-
ciation for Computing Machinery.
OpenAI (2024). Gpt-4 technical report.
Padmanabha, A., Yuan, J., Gupta, J., Karachiwalla, Z.,
Majidi, C., Admoni, H., and Erickson, Z. (2024).
Voicepilot: Harnessing llms as speech interfaces
for physically assistive robots. arXiv preprint
arXiv:2404.04066.
Randers, I. and Mattiasson, A.-C. (2004). Autonomy
and integrity: upholding older adult patients’ dignity.
Journal of Advanced Nursing, 45(1):63–71.
Sanders, J. and Martin-Hammond, A. (2019). Exploring
autonomy in the design of an intelligent health assis-
tant for older adults. In Companion Proceedings of the
24th International Conference on Intelligent User In-
terfaces, IUI ’19 Companion, page 95–96, New York,
NY, USA. Association for Computing Machinery.
Sato, A., Watanabe, K., and Rekimoto, J. (2014). Mimi-
cook: a cooking assistant system with situated guid-
ance. TEI ’14, page 121–124, New York, NY, USA.
Association for Computing Machinery.
Singh, I., Blukis, V., Mousavian, A., Goyal, A., Xu, D.,
Tremblay, J., Fox, D., Thomason, J., and Garg, A.
(2022). Progprompt: Generating situated robot task
plans using large language models.
Tang, J. and Wang, K. (2018). Personalized top-n sequen-
tial recommendation via convolutional sequence em-
bedding. In Proceedings of the Eleventh ACM Inter-
national Conference on Web Search and Data Mining,
WSDM ’18, page 565–573, New York, NY, USA. As-
sociation for Computing Machinery.
Tuokko, H., Morris, C., and Ebert, P. (2005). Mild cognitive
impairment and everyday functioning in older adults.
Neurocase, 11(1):40–47. PMID: 15804923.
Wang, H., Gonzalez-Pumariega, G., Sharma, Y., and
Choudhury, S. (2023). Demo2code: From summariz-
ing demonstrations to synthesizing code via extended
chain-of-thought.
Wei, J., Wang, X., Schuurmans, D., Bosma, M., Ichter, B.,
Xia, F., Chi, E., Le, Q., and Zhou, D. (2023). Chain-
of-thought prompting elicits reasoning in large lan-
guage models.
Wherton, J. P. and Monk, A. F. (2010). Problems people
with dementia have with kitchen tasks: The challenge
for pervasive computing. Interacting with Computers,
22(4):253–266. Supportive Interaction: Computer In-
terventions for Mental Health.
Wu, J., Antonova, R., Kan, A., Lepert, M., Zeng, A., Song,
S., Bohg, J., Rusinkiewicz, S., and Funkhouser, T.
(2023). Tidybot: Personalized robot assistance with
large language models. Autonomous Robots.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
530

Yu, R., Lai, D., Leung, G., Tong, C., Yuen, S., and Woo,
J. (2023). A dyadic cooking-based intervention for
improving subjective health and well-being of older
adults with subjective cognitive decline and their care-
givers: A randomized controlled trial. The Journal of
nutrition, health and aging, 27(10):824–832.
Zhao, M., Simmons, R., and Admoni, H. (2022). Coordina-
tion with humans via strategy matching.
APPENDIX
Action Sets
Salad Action Set. [start, cut lettuce, place
lettuce into bowl, cut tomato, place
tomato into bowl, cut cucumber, place
cucumber into bowl, add salt, add pepper,
serve salad onto plate, end, cut cheese,
place cheese into bowl, add oil, add
vinegar, mix ingredients, mix dressing,
add dressing]
Sandwich Action Set. [start, place peanut
butter onto bread 1, spread peanut butter
onto bread 1, place peanut butter onto
bread 2, spread peanut butter onto bread
2, place jam onto bread 2, spread jam
onto peanut butter on bread 2, put bread
together, serve sandwich onto plate,
end, place jam onto bread 1, spread jam
onto peanut butter on bread 1, spread jam
onto bread 2, spread jam onto bread 1,
cut sandwich, spread jam next to peanut
butter on bread 1, cut off crusts, spread
peanut butter onto jam on bread 1]
LLM Prompts
These were the prompts used in the Independent Con-
text and Shared Context LLM methods. Temperature
was set to 0.
Independent Context
In this setup, the model is called three times to
generate the most likely, second most likely, and
third most likely predictions. The output of each
call is used to guide the next. The second prediction
uses the output of the most likely prediction, and the
third prediction uses the outputs of both the most and
second most likely predictions.
Asking for Predictions with Previously Seen Trials.
“I am going to ask you to predict the next action in a
salad-making sequence. For an unseen test partici-
pant, I will provide some of their previous trials for
reference, as well as the previously seen actions from
the current trial. Please output the most likely pre-
diction of the next action which would immediately
follow the last action in the provided list of previous
actions in the current sequence. Choose from the pro-
vided actions list with no other extraneous words or
phrases. Your response should be a maximum of 4
words.”
Asking for Predictions Without Previously Seen
Trials (Testing on Seq. 1). “I am going to ask you to
predict the next action in a salad-making sequence.
You have not seen any of this participant’s previous
trials. I will provide the previously seen actions from
the current trial. Please output the most likely pre-
diction of the next action which would immediately
follow the last action in the provided list of previous
actions in the current sequence. Choose from the
provided actions list with no other extraneous words
or phrases. Your response should be a maximum of 4
words.”
For the second and third most likely predictions,
follow the same process as described above:
• Second prediction: “If the most likely prediction
is pred list, please output the second most likely
prediction.”
• Third prediction: “If the most likely predic-
tion is pred list[0] and the second most likely is
pred list[1], please output the third most likely
prediction.”
Shared Context
In this case, the model is again called three times
(most likely, second most likely, and third most likely
predictions), using the output from the previous call
to inform subsequent predictions. Additionally, the
model is provided with context from other partici-
pants’ trials.
Asking for Predictions with Previously Seen
Trials. “I am going to ask you to predict the next
action in a salad-making sequence. For an unseen
test participant, I will provide some of their previous
trials, as well as the entire trials of other participants
for reference. I will also provide the previously seen
actions from the current trial. Please output the
most likely prediction of the next action which would
immediately follow the last action in the provided
list of previous actions in the current sequence.
Leveraging Large Language Models for Preference-Based Sequence Prediction
531

Choose from the provided actions list with no other
extraneous words or phrases. Your response should
be a maximum of 4 words.”
Asking for Predictions Without Previously Seen
Trials. “I am going to ask you to predict the next ac-
tion in a salad-making sequence. You have not seen
any of this participant’s previous trials. I will provide
the previously seen actions from the current trial as
well as the entire trials of other participants for ref-
erence. Please output the most likely prediction of the
next action which would immediately follow the last
action in the provided list of previous actions in the
current sequence. Choose from the provided actions
list with no other extraneous words or phrases. Your
response should be a maximum of 4 words.”
For the second and third most likely predictions,
follow the same process as described in the Indepen-
dent Context:
• Second prediction: “If the most likely prediction
is pred list, please output the second most likely
prediction.”
• Third prediction: “If the most likely predic-
tion is pred list[0] and the second most likely is
pred list[1], please output the third most likely
prediction.”
Project Webpage
The prompts used in this work are also avail-
able on the project webpage: sites.google.com/view/
preference-based-prediction
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
532
