
Enhancing Small Object Detection in Resource-Constrained ARAS Using
Image Cropping and Slicing Techniques
Chinmaya Kaundanya
1 a
, Paulo Cesar
2 b
, Barry Cronin
2 c
, Andrew Fleury
2 d
,
Mingming Liu
1 e
and Suzanne Little
1 f
1
Research Ireland Insight Centre for Data Analytics, Dublin City University, Ireland
2
Luna Systems, Dublin, Ireland
chinmaya.kaundanya3@mail.dcu.ie, {paulo.cesar, barry.cronin, andrew.fleury}@luna.systems,
Keywords:
Small Object Detection, ARAS, Micromobility, Image Pre-Processing.
Abstract:
Powered two-wheelers, such as motorcycles, e-bikes, and e-scooters, exhibit disproportionately high fatality
rates in road traffic incidents worldwide. Advanced Rider Assistance Systems (ARAS) have the potential to
enhance rider safety by providing real-time hazard alerts. However, implementing effective ARAS on the
resource-constrained hardware typical of micromobility vehicles presents significant challenges, particularly
in detecting small or distant objects using monocular cameras and lightweight convolutional neural networks
(CNNs). This study evaluates two computationally efficient image preprocessing techniques aimed at improv-
ing small and distant object detection in ARAS applications: image center region-of-interest (ROI) cropping
and image slicing and re-slicing. Utilizing the YOLOv8-nano object detection model at relatively low in-
put resolutions of 160×160, 320×320, and 640×640 pixels, we conducted experiments on the VisDrone and
KITTI datasets, which represent scenarios where small and distant objects are prevalent. Our results indi-
cate that the image center ROI cropping technique improved the detection of small objects, particularly at a
320×320 resolution, achieving enhancements of 6.67× and 1.27× in mean Average Precision (mAP) on the
VisDrone and KITTI datasets, respectively. However, excessive cropping negatively impacted the detection
of medium and large objects due to the loss of peripheral contextual information and the exclusion of objects
outside the cropped region. Image slicing and re-slicing demonstrated impressive improvements in detecting
small objects, especially using the grid-based slicing strategy on the VisDrone dataset, with an mAP increase
of 2.24× over the baseline. Conversely, on the KITTI dataset, although a performance gain of 1.66× over the
baseline was observed for small objects at a 320×320 resolution, image slicing adversely affected the detec-
tion of medium and large objects. The fragmentation of objects at image slice borders caused partial visibility,
which reduced detection accuracy. These findings contribute to the development of more effective and ef-
ficient ARAS technologies, ultimately enhancing the safety of powered two-wheeler riders. Our evaluation
code scripts are publicly accessible at: https://github.com/Luna-Scooters/SOD using image preprocessing.
1 INTRODUCTION
Micromobility refers to lightweight, usually electric,
vehicles such as e-scooters and e-bikes, designed for
short-distance travel in urban areas. The rise of these
new transportation modes, particularly e-scooters, has
introduced significant safety challenges that compli-
a
https://orcid.org/0009-0007-4046-5936
b
https://orcid.org/0009-0000-7171-499X
c
https://orcid.org/0009-0008-5720-8941
d
https://orcid.org/0009-0003-6916-6770
e
https://orcid.org/0000-0002-8988-2104
f
https://orcid.org/0000-0003-3281-3471
cate their integration into urban environments. The
growing popularity of e-scooters has been accompa-
nied by a sharp increase in related injuries and fatali-
ties. In the United States, between 2017 and 2021, in-
juries associated with micromobility vehicles surged
by 127%, reaching 77,200 incidents (Chen et al.,
2024). Similarly, in 2023, police in Germany reported
9,425 e-scooter accidents, a 14.1% increase from the
previous year’s 8,260, with the number of fatalities
from micromobility-related road accidents doubling
compared to 2022. In Paris, e-scooters were used for
around 20 million trips on 15,000 rental scooters in
2022, yet the city recorded 459 accidents involving
570
Kaundanya, C., Cesar, P., Cronin, B., Fleury, A., Liu, M. and Little, S.
Enhancing Small Object Detection in Resource-Constrained ARAS Using Image Cropping and Slicing Techniques.
DOI: 10.5220/0013190400003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
570-583
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

these vehicles or similar micromobility devices, in-
cluding three fatal incidents (dwG, 2024).
Advanced Rider Assistance Systems (ARAS) are
designed to enhance the safety of powered two-
wheelers, such as motorcycles, scooters, and micro-
mobility vehicles. These systems integrate a combi-
nation of sensors, advanced algorithms, and connec-
tivity features to assist riders in diverse traffic situ-
ations, aiming to reduce accidents and improve the
overall riding experience (Ait-Moula et al., 2024).
The majority of ARAS systems offer applications
such as vehicle collision warning, blind spot de-
tection, Acitive Cruise Control et cetera (Ait-Moula
et al., 2024). Unlike ARAS, Advanced Driver As-
sistance Systems (ADAS) are developed for four-
wheeled vehicles, which have the capacity and com-
putational resources to accommodate and power so-
phisticated hardware optimized for complex artificial
intelligence (AI) models.
ADAS hardware platforms are varied, rang-
ing from complex multiprocessor system-on-chip
(MPSoC) CPUs to traditional microcontroller units
(MCUs), digital signal processors (DSPs), and spe-
cialized hardware like field-programmable gate ar-
rays (FPGAs), application-specific integrated cir-
cuits (ASICs), or dedicated GPU platforms such as
NVIDIA’s Tegra and Jetson families. Due to the
resource-constrained environment of micromobility
vehicles, implementing AI-based ARAS necessitates
the use of low-compute hardware platforms. As a re-
sult, there is a trade-off between the complexity of
the models implemented and the hardware platform,
which impacts performance metrics including func-
tional accuracy, energy consumption, and process-
ing speed (latency and throughput) (Borrego-Carazo
et al., 2020).
ARAS typically consist of monocular cameras,
multi-camera setups, or multi-sensor fusion systems,
and can operate in either active or passive modes. In
this study, we consider a monocular camera-based,
passive ARAS that utilizes a low-specification hard-
ware platform running a two-dimensional (2D) ob-
ject detection convolutional neural network (CNN)
model. This system alerts riders to potential headway-
monitoring events involving objects approaching
from the front, where a headway monitoring warn-
ing is triggered when the distance to the vehicle
ahead becomes unsafe and more distancing is re-
quired. The standard procedure for deploying such
an ARAS involves mounting the camera at a fixed
position on the vehicle and calibrating it to map the
three-dimensional (3D) world coordinates to the two-
dimensional (2D) image coordinate system. A cru-
cial component of this is the object detection model,
which is then used by an object tracking algorithm
that monitors objects over time to determine their dis-
tance and velocity based on predefined rules. Since
the ARAS system relies on the initial detection of ob-
jects by the model, early detection accuracy is vital to
the overall performance of the system.
Considering huge advancements in the object de-
tection field, CNN models exhibit impressive perfor-
mance with affordable computational requirements,
making them suitable for resource-constrained de-
vices. However, detecting small or distant objects
remains a major challenge compared to objects of
conventional scale. Small objects occupy fewer pix-
els and contain less information, resulting in sub-
stantially lower detection performance. The com-
mon challenges associated with small object detec-
tion include: (1) insufficient feature representation
from individual layers in basic CNNs for small ob-
jects; (2) a lack of contextual information necessary
for accurate detection; (3) an imbalance between fore-
ground and background training examples that com-
plicates classification; and (4) a scarcity of positive
training examples for small objects (Liu et al., 2021).
In ARAS applications on resource-constrained plat-
forms, significant computational limitations make it
crucial to balance the trade-off between required la-
tency and the accuracy of object detection models.
Low-specification platforms, such as microcontrollers
with limited memory, are unable to support advanced
object detection algorithms or process high-resolution
images, which exacerbates the difficulty of detecting
small or distant objects.
To address this challenge, we evaluate two image
preprocessing techniques: (1) image center region-of-
interest (ROI) cropping and (2) image slicing and re-
slicing, using the KITTI (Geiger et al., 2013) and Vis-
Drone (Du et al., 2019) datasets. The motivation for
employing these techniques is to enhance the model’s
performance in detecting small or distant objects by
introducing computationally inexpensive operations
as an image preprocessing step during model infer-
ence. Experiments are conducted using the YOLOv8-
nano (Jocher et al., 2023) model with input image
resolutions of 160×160, 320×320, and 640×640. In
this study, we adopt the definition of small objects as
specified in the MS COCO (Lin et al., 2014) evalua-
tion metrics: objects with bounding boxes occupying
areas less than or equal to 32×32 pixels are classi-
fied as “small,” those up to 96×96 pixels are consid-
ered “medium,” and large objects exceed these dimen-
sions. These size thresholds are widely recognized
within the community for datasets involving common
objects. The initial experiments are performed on the
VisDrone dataset to validate the effectiveness of the
Enhancing Small Object Detection in Resource-Constrained ARAS Using Image Cropping and Slicing Techniques
571

two techniques before evaluating them on the KITTI
dataset.
Given that the VisDrone dataset comprises im-
ages captured by drone-mounted cameras, it provides
a rich source of small or distant objects, which are
particularly challenging for object detection models.
Moreover, drones themselves exemplify resource-
constrained environments. Due to the limited avail-
ability of labelled ARAS datasets specifically for two-
wheelers, we selected the KITTI dataset for our eval-
uation. The KITTI dataset contains front-facing cam-
era images collected from cameras mounted on cars,
serving as an appropriate benchmark for assessing the
aforementioned image preprocessing techniques.
The image centre region-of-interest (ROI) crop-
ping experiments on both the VisDrone and KITTI
dataset demonstrate a positive trend in the model’s
performance, particularly in detecting small objects
as the cropping factor increases. However, aggres-
sive cropping causes the model to miss a significant
number of large objects that majorly lie outside the
cropped ROI, thereby reducing detection performance
for such object sizes. Excessive cropping leads to a
narrow field of view, which excludes many medium
and large objects, underscoring the importance of bal-
ancing zoom levels to optimize detection across dif-
ferent object scales.
Image slicing and re-slicing show impressive im-
provements in detecting small objects, especially
with the grid-based slicing strategy on the VisDrone
dataset, where remarkable performance is observed
over the baseline. However, on the KITTI dataset,
while a notable performance increase is seen for small
objects at lower resolutions, image slicing negatively
impacts the detection of medium and large objects.
Qualitative analysis in Figure 3 and Figure 4 indicates
that slicing the images often leads to abrupt truncation
of medium and small objects, causing them to appear
only partially within the image slices. This partial vis-
ibility adversely affects the model’s performance due
to incomplete object representations. Figure 5 and
Figure 6 demonstrate the trend in the mAP scores for
all the scales and input resolutions on both VisDrone
and KITTI test sets.
The structure of the paper is organized as follows:
Section 2 reviews related techniques in the area of
small object detection. In Section 3, we explain the
two image preprocessing methods of interest. Sec-
tion 4 provides details about the datasets used in the
experiments, while Section 5 describes the experi-
mental setup. The results of the experiments are pre-
sented and analyzed in Section 6, and finally, our con-
clusions are drawn in Section 7.
2 RELATED WORK ON SMALL
OBJECT DETECTION
Existing techniques for improving small object detec-
tion often involve modifications to the architectures of
object detection models specifically tailored for en-
hanced detection of small objects. However, these
modifications typically increase the number of param-
eters, which is suboptimal for resource-constrained
devices with limited memory. Another common ap-
proach involves image augmentation techniques, such
as copy-pasting small objects into various positions,
dividing and resizing images, or using generative ad-
versarial networks (GANs) to generate synthetic sam-
ples of small objects. While effective, these methods
are primarily training-time strategies and do not ad-
dress the challenges of optimizing inference perfor-
mance on resource-limited hardware. Although re-
cent studies have proposed lightweight object detec-
tion architectures, they remain too large for ultra-low-
specification devices such as microcontroller units
(MCUs).
2.1 Small Object Detection Using
Architectural Adjustments
Small object detection (SOD) remains a significant
challenge in computer vision due to limited pixel rep-
resentation, which makes feature extraction difficult.
A common approach to tackle these challenges in-
volves architectural modifications aimed at preserv-
ing crucial spatial information and enhancing feature
representations at multiple scales. Feature Pyramid
Networks (FPN) (Lin et al., 2017) have been exten-
sively used to address the loss of spatial details for
small objects. FPN-based models integrate low-level
and high-level feature maps to enhance small object
detection accuracy. Despite their success, recent re-
search indicates that simple feature fusion may intro-
duce noise, potentially overwhelming the signal from
small objects. Thus, many enhancements have been
proposed, such as PANet (Liu et al., 2018), which
improves the information transmission between fea-
ture maps by introducing a bottom-up path augmen-
tation. Similarly, NAS-FPN (Ghiasi et al., 2019) uses
neural architecture search to optimize feature fusion
schemes across different layers, improving the repre-
sentation for small targets.
Another notable architectural adjustment is the
attention mechanism, which has been used to am-
plify relevant spatial information. For instance, SSP-
Net (Hong et al., 2021) incorporates context attention
modules that emphasize features at specific scales,
addressing gradient inconsistencies and improving
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
572

small object detection. More recent approaches,
based on new versions of YOLO (Zhao et al., 2023; Li
et al., 2023; Wang et al., 2023; Tang et al., 2024), in-
clude additional prediction heads specifically for de-
tecting extremely small objects, although at the cost
of increased computational demands.
2.2 Small Object Detection Using Image
Augmentation Techniques
In addition to architectural modifications, image pre-
processing and augmentation techniques play a vital
role in enhancing small object detection in resource-
constrained environments. Data augmentation ap-
proaches such as oversampling and copy-paste meth-
ods have been proposed to address the insufficient
representation of small objects in training datasets.
Kisantal et al. (Kisantal, 2019) introduced a copy-
paste technique to increase the diversity of small ob-
ject instances by duplicating and pasting small ob-
jects into different parts of the image. While effec-
tive, these methods sometimes introduce unrealistic
context, which can degrade detection performance.
To overcome the limitations of traditional aug-
mentation, contextual-aware augmentation strategies
have been explored. For instance, Chen et al. (Chen
et al., 2019) proposed RRNet, which leverages a
semantic segmentation network to ensure that aug-
mented objects are placed in semantically consis-
tent regions of the image, leading to better detec-
tion performance. Similarly, Zhao et al. (Zhao et al.,
2019) used context-preserving transformations, such
as modifying brightness and blending objects into
suitable backgrounds, to enhance the detection of
small objects.
Another line of research involves super-resolution
techniques to enhance the quality of small objects be-
fore detection. GAN-based super-resolution models,
such as MTGAN (Bai et al., 2018), aim to improve
the visibility of small targets by generating higher-
resolution representations. These methods have been
effective in enhancing the detection of small objects,
especially in scenarios like UAV-based and remote
sensing applications, where objects of interest are typ-
ically far from the camera (Li et al., 2017). However,
GAN-based methods can be computationally expen-
sive, making them significantly challenging to deploy
in resource-constrained environments.
Several unique hybrid techniques have been pro-
posed to enhance small object detection. For instance,
EdgeDuet (Yang et al., 2022) utilizes tiling, where
video frames are partitioned into smaller tiles, and
only the tiles containing potential small objects are
offloaded to the cloud for detection. This approach re-
duces the data transmitted to the cloud, thereby accel-
erating small object detection by focusing processing
power on relevant areas. However, this tiling method
relies on cloud processing, which can introduce de-
lays if network conditions are poor.
Some studies propose lightweight object detection
networks such as the Lightweight Multi-Scale Atten-
tion YOLOv8 (Ma et al., 2024), which is a multi-
scale fusion attention-based architecture. Similarly,
RC-YOLO (Guo et al., 2024) uses predefined anchor
boxes to predict target box sizes, improving object de-
tection speed and accuracy. Nonetheless, even though
these models are designed to be lightweight, they are
still too large for low-spec devices such as microcon-
troller units.
3 IMAGE PRE-PROCESSING FOR
SOD
This section outlines the methodology used in this
study, focusing on image preprocessing techniques
to evaluate their impact on improving the detection
of small or distant objects in Advanced Rider Assis-
tance Systems (ARAS) within resource-constrained
environments. Two key image preprocessing tech-
niques were utilized: (1) image center region-of-
interest (ROI) cropping and (2) image slicing and re-
slicing. The rationale and implementation logic be-
hind both techniques are detailed, along with their re-
spective motivations. To illustrate these methods, vi-
sual simulations are presented using sample images.
3.1 Image Centre ROI Cropping
We implement an iterative image centre Region of In-
terest (ROI) cropping technique to evaluate its impact
on object detection performance, especially for de-
tecting small or distant objects relative to the camera.
Image cropping, a fundamental technique in spatial
domain processing, involves selecting a specific sub-
set of pixels from the original image, thereby reduc-
ing its dimensions while maintaining the resolution
of the retained area. Our approach systematically in-
creases the crop percentage from all sides of the input
images. This methodology is specifically tailored for
ARAS use cases, where the upper portion of images –
predominantly consisting of the sky – is deemed less
critical. Conversely, the lower portion is crucial for
detecting objects in proximity to the rider; therefore,
we apply minimal cropping to the bottom edge to pre-
serve these important details.
We select four progressive cropping factors. Crop-
ping begins with a 10% reduction from the sides and
Enhancing Small Object Detection in Resource-Constrained ARAS Using Image Cropping and Slicing Techniques
573

top and 1% from the bottom. With each iteration, we
increase the cropping by an additional 10% from the
sides and top and 1% from the bottom, culminating in
a total of 40% cropping from the sides and top and 4%
from the bottom. This technique effectively zooms
into a designated region of each image across mul-
tiple iterations. Initially, the cropping is applied to
the original high-resolution images, which are subse-
quently resized during the YOLOv8 model inference.
The detailed technical explanation can be found in the
section 5
During each iteration, ground truth bounding
boxes are adjusted to ensure a fair comparison with
the model’s predictions. Boxes that are entirely out-
side the ROI are excluded, and the remaining annota-
tions are meticulously aligned with the new cropped
dimensions. The model’s predictions are then com-
pared against the adjusted ground truth annotations,
and performance metrics – specifically mean Average
Precision (mAP) at a threshold of 0.5 – are computed
for various object size categories, small, medium, and
large.
3.2 Image Slicing and Re-Slicing
Image slicing and re-slicing is a technique in which
high-resolution images are partitioned into multiple
low-resolution slices or patches, which are then pro-
cessed sequentially by an object detection model.
Subsequently, the detections from each slice are
mapped back onto the original high-resolution image
by combining the bounding box predictions. In this
work, we consider two types of slicing strategies –
grid slicing and vertical slicing – with the number
of slices fixed at four. To limit computational over-
head, we ensure that there is no overlap among the
slices. We utilized the SAHI (Slicing Aided Hyper In-
ference) (Akyon et al., 2022) implementation for im-
age slicing during model inference and for re-slicing
the bounding box predictions. Details about SAHI are
provided in Section 3.2.1.
The motivation behind this technique is to lever-
age the higher inference-per-second capacity of tar-
get platforms equipped with dedicated machine learn-
ing accelerators, such as GPUs or DSPs, thereby
enhancing the ability of compact detection models
to detect smaller or more distant objects in real
time. Additionally, this technique is advantageous for
low-specification microcontrollers with limited im-
age buffer capacity, as high-resolution images can be
sliced into multiple patches and processed sequen-
tially, improving detection performance at the ex-
pense of additional processing time.
3.2.1 Slicing Aided Hyper Inference (SAHI)
SAHI is an open-source framework designed to en-
hance the detection of small and distant objects that
often struggle to be accurately identified by standard
object detection models due to their limited pixel
representation in high-resolution images. SAHI ad-
dresses this issue by dividing an image into smaller
overlapping slices during both training (fine-tuning)
and inference stages, resulting in larger relative pixel
coverage for small objects, which aids detection with-
out needing extensive modifications to existing ob-
ject detection models. During inference, an image
is sliced into overlapping patches, resized while pre-
serving the aspect ratio, and each patch is processed
independently by an object detection model. The fi-
nal predictions are merged using Non-Maximum Sup-
pression (NMS), with parameters such as the Inter-
section Over Smaller (IoS) area used to fine-tune de-
tection in cases of overlapping predictions. Addition-
ally, GREEDYNMM (Greedy Non-Maximum Merg-
ing) and NMS help in ensuring the best possible
bounding box proposals are retained. The pipeline
can optionally add predictions from a full-image in-
ference pass to detect larger objects, thereby combin-
ing the benefits of detailed small object detection and
complete scene analysis. This slicing-based approach
is particularly suitable for applications in ARAS for
micromobility vehicles, as it can improve the detec-
tion of small or far-away objects such as pedestri-
ans, bicycles, or other vehicles, using computation-
ally inexpensive techniques – essential for resource-
constrained environments.
4 DATASETS
In this study, we utilize two popular datasets, KITTI
and VisDrone, to evaluate the effectiveness of the im-
age preprocessing techniques discussed in the pre-
vious section. These datasets were chosen due to
their relevance to the target applications and their di-
verse data characteristics. This section provides an
overview of the key attributes of each dataset and
highlights their significance for the experiments con-
ducted in this work.
4.1 VisDrone
The VisDrone dataset is a comprehensive bench-
mark in computer vision, consisting of 10,000 high-
resolution images captured by drone-mounted cam-
eras in 14 different cities across China. The images
were collected under various weather and lighting
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
574

Figure 1: A cropping simulation on a sample image from KITTI dataset. (a) represents the original image followed by the
regions-of-interest as per the different cropping factors captioned in the format: left/right/top crop % – bottom crop %. This
figure also demonstrates selecting a specific region-of-interest to include salient parts of the image for ARAS use-cases.
Figure 2: An Image-slicing simulation on a sample image from KITTI dataset. (a) represents the original image, (b) shows the
grid-based slicing style and (c) is the vertical slicing style. This figure also demonstrates how different image slices capture
different parts of the image. The figure also demonstrates the effect of different slicing styles on the original image.
conditions, encompassing diverse urban and suburban
environments. Each image is annotated with detailed
information for a wide range of object categories in-
cluding pedestrians, bicycles, cars, and tricycles. Due
to the aerial perspective of drones, the dataset con-
tains a significant number of small or distant objects,
which are particularly challenging for object detec-
tion models.
Drones operate in resource-constrained environ-
ments similar to micromobility vehicles, often hav-
ing limited computational capabilities and energy re-
sources. This resemblance underscores the relevance
of using the VisDrone dataset to evaluate methods that
improve object detection performance without impos-
ing significant additional computational burdens.
Table 1: Number of ground truth objects per class and size
in VisDrone–Test set.
Class GT Count
Small Medium Large
Pedestrian 18,848 2,066 92
People 6,025 348 3
Bicycle 1,067 230 5
Car 15,121 11,843 1,110
Van 2,912 2,669 190
Truck 777 1,445 437
Tricycle 263 249 18
Awning-tricycle 274 300 25
Bus 703 1,714 523
Motor 4,847 992 6
4.2 KITTI
The KITTI dataset is a widely recognized bench-
mark in computer vision, particularly in the domains
of autonomous driving and advanced driver assis-
tance systems. It offers a comprehensive collection
of high-quality data captured from vehicles equipped
with multiple sensors, including high-resolution RGB
cameras, grayscale stereo cameras, and 3D laser scan-
ners (LiDAR). The dataset comprises over 200,000
images with detailed annotations for various tasks
such as object detection, tracking, semantic segmen-
tation, and optical flow. Annotated classes include
cars, pedestrians, cyclists, and other road users, en-
compassing a diverse range of urban, rural, and high-
way environments under different weather and light-
ing conditions.
Although originally designed for autonomous ve-
hicles, the KITTI dataset is highly pertinent to ARAS
for micromobility vehicles. The front-facing cam-
era images simulate the perspective of a rider, captur-
ing dynamic traffic scenarios that are critical for rider
safety. This alignment makes KITTI an appropriate
and valuable resource for evaluating object detection
models in contexts relevant to ARAS applications.
The dataset’s rich diversity in object scales, dis-
tances, and occlusion levels makes it particularly use-
ful for assessing techniques aimed at enhancing the
detection of small or distant objects – challenges
that are especially pronounced in ARAS due to lim-
ited computational resources and the necessity for
timely hazard recognition. By providing a realistic
and complex visual environment, the KITTI dataset
enables rigorous evaluation of object detection mod-
els under conditions that closely mirror real-world
riding situations. This facilitates the testing and re-
finement of image preprocessing strategies intended
to improve model performance on small or far-away
objects without imposing significant additional com-
putational burden. Consequently, the KITTI dataset
Enhancing Small Object Detection in Resource-Constrained ARAS Using Image Cropping and Slicing Techniques
575

Figure 3: A comparative qualitative analysis of Image-centre-ROI cropping technique on KITTI test set with different resolu-
tions and cropping factors. The rows represent the centre ROI cropping factors (left/right/top crop percentage) and columns
denote model input image resolutions. The Green circles highlight the small or distant objects detected due to ROI cropping.
The red circle shows the missed objects due to excessive cropping.
serves as an ideal benchmark for advancing the de-
velopment of efficient ARAS systems in real-world
traffic conditions. In this study, we use small and dis-
tant terms interchangeably as, particularly in KITTI
dataset, there is no class that represents a small object
that might appear close to the camera.
Table 2: Number of ground truth objects per class and size
in KITTI–Test set.
Class GT Count
Small Medium Large
Car 478 1580 865
Cyclist 41 83 17
Misc 20 56 17
Pedestrian 89 233 105
Person sitting 0 10 9
Tram 2 21 15
Truck 20 62 25
Van 35 160 90
5 EXPERIMENT SETUP
For the experiments, we used the YOLOv8-nano
model architecture, utilizing Ultralytics’ (Jocher
et al., 2023) API for model training. The standard
training configuration provided by Ultralytics was
used to train YOLOv8n on the KITTI and VisDrone
datasets. The model was trained on three input resolu-
tions – 160×160, 320×320, and 640×640 – over a to-
tal of 100 epochs. During training, we applied trans-
lation (translate=0.1) and scaling (scale=0.5) trans-
formations, along with mosaic augmentation (mo-
saic=1.0, close mosaic=10), to simulate the image
preprocessing techniques described in Section 3 , en-
suring consistency with the strategies evaluated dur-
ing inference.
We conducted two sets of experiments for the im-
age slicing and re-slicing technique, implementing
two distinct slicing strategies: grid-based slicing and
vertical slicing. For each strategy, we performed ex-
periments at three resolutions – 160×160, 320×320,
and 640×640 – both with and without slicing, the lat-
ter serving as the baseline for comparison. The mean
Average Precision (mAP) scores for small, medium,
and large objects, categorized according to the MS
COCO guidelines as described in section 1, were eval-
uated with an Intersection Over Union (IoU) thresh-
old set to 0.5. The primary objective of these experi-
ments was to determine whether real-time image slic-
ing improves the model’s ability to focus on small
or distant objects – details that might otherwise be
missed in the original image – and thereby enhance
detection performance for small objects.
We chose non-overlapping grid-based slicing not
only because it maintains the aspect ratio of the origi-
nal image and allows the model to focus on all parts of
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
576

Figure 4: A comparative qualitative analysis of Image slicing and re-slicing technique on KITTI test set with different reso-
lutions and slicing strategies. The rows represent the slicing strategy and columns denote model input image resolutions. The
Green circles highlight the small or distant objects detected due to image slicing. The red circle shows the missed objects due
to slicing style.
Figure 5: A comparative quantitative analysis of Image-centre-ROI cropping technique on VisDrone test set with different
resolutions and cropping factors.
the image individually, but also because it is arguably
a challenging slicing style. It is challenging because,
it often results in objects near the centre region being
awkwardly split across slices, adding complexity to
the detection process. Naturally, this makes it the per-
fect challenge for evaluating the model’s performance
especially the small or in this case, distant objects lie
near central region. On the other hand, the vertical
slicing strategy is less prone to awkwardly splitting
objects as it only divides the image along the verti-
cal axis. This method is particularly advantageous
for monocular camera-based ARAS applications, as
it captures detailed lane-wise information: the outer
slices focus on areas such as parked vehicles and side-
walks, while the central slices cover the main road-
way, which is crucial for detecting vehicles in these
specific regions.
In the image centre ROI cropping experiment, we
selected four iterations with different cropping fac-
tors. The reference point for the ROI in each iteration
is fixed at the centre, and we progressively crop from
the horizontal and vertical edges of the image. The
first iteration begins by cropping 10% of the overall
pixel width from the left and right sides, 10% from
the top, and 1% from the bottom. The remaining por-
tion of the image serves as the ROI for that iteration
and is then passed to the YOLOv8n model for infer-
ence.
Ground truth boxes of objects that appear com-
pletely outside the ROI are eliminated, and those par-
tially appearing inside the ROI are adjusted to include
only the portion within the ROI. The mean Average
Precision (mAP) scores for small, medium, and large
objects – categorized according to the MS COCO
guidelines as described in Section 1 – were evalu-
ated using an Intersection Over Union (IoU) threshold
set to 0.5. These steps are repeated for all iterations,
each time applying additional cropping to emulate
a zooming effect, thereby making the ROI progres-
sively smaller. The mAP scores are then recorded for
all iterations and compared with the baseline, which
is the image without any cropping of the ROI. We per-
form these evaluations on host machines so different
performance and inference latency is to be expected
when deployed on low-spec hardware platforms.
Enhancing Small Object Detection in Resource-Constrained ARAS Using Image Cropping and Slicing Techniques
577
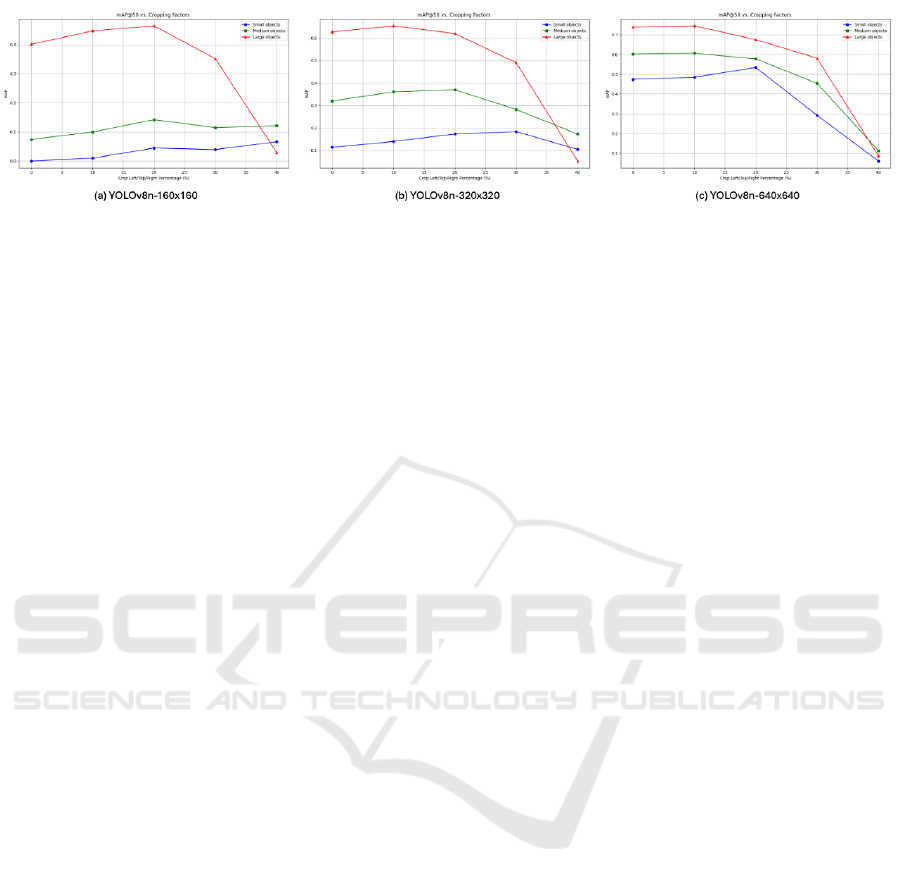
Figure 6: A comparative quantitative analysis of Image-centre-ROI cropping technique on KITTI test set with different
resolutions and cropping factors.
6 RESULTS AND DISCUSSIONS
In the following sections, we present a comprehen-
sive evaluation of the YOLOv8n models on the Vis-
Drone and KITTI test sets, focusing on techniques
aimed at improving the detection of small and dis-
tant objects. Table 1 and Table 2 shows the number
of ground truth objects per class and size in VisDrone
and KITTI-Test sets respectively. We explore the per-
formance of models at various resolutions (160×160,
320×320, and 640×640) when image slicing is ap-
plied, as well as when image centre ROI cropping
with different cropping factors is applied to the base-
line models. By analysing the mean Average Preci-
sion (mAP@50) scores across small, medium, and
large object categories, we aim to understand how
image slicing and cropping strategies influence ob-
ject detection performance. Our findings highlight
that image slicing poses challenges due to partial ob-
ject visibility. However, centre ROI cropping, when
applied in a controlled manner, can significantly im-
prove the detection of small or distant objects – even
at relatively low image resolutions.
6.1 Small/Distant Object Detection
Using Image Slicing and Re-Slicing
6.1.1 Evaluation on VisDrone Test-Set
In Table 3 and Table 4 a clear upward trend in mAP
scores is observed across all grid and vertical slicing
models as the resolution increases from 160 to 320 to
640. This trend is expected, as increasing image res-
olution naturally enhances detection accuracy by pro-
viding more detailed object features for the model to
process thus reinforcing the validity of the proposed
technique.
The mAP (small) and mAP (medium) scores of
both grid and vertical slicing models at all resolutions
are higher than those of their respective baseline mod-
els. Notably, for small objects at lower resolutions
– 160 and 320 – the growth in mAP is substantial.
For the grid-based slicing strategy, the increases are
+170% and +144% for resolutions 160 and 320, re-
spectively. For the vertical slicing strategy, the in-
creases are +60% and +68%, respectively. However,
there is a decline in model performance for large ob-
jects at all resolutions in both strategies. This sug-
gests that large objects are most adversely affected by
slicing, which can cut them abruptly, especially con-
sidering the density of objects in each image of the
VisDrone dataset.
Slicing has shown improved performance for
small and medium objects as the model is able to
focus on tiny features by processing the slices indi-
vidually, resulting in improvements over the baseline
performance. Furthermore, given the nature of the
images and objects in the VisDrone dataset, the grid-
based slicing showed better results than vertical slic-
ing because more objects are abruptly cut in vertical
slicing.
6.1.2 Evaluation on KITTI Test-Set
Unlike the VisDrone dataset, the slicing technique ap-
plied to KITTI images did not yield significant im-
provements. Tables 5 and 6 show that, for grid-based
slicing, the mAP scores of the models at all resolu-
tions and for objects of all scales were observed to be
lower than those of the baseline models. In the case
of vertical slicing, particularly at the 160×160 reso-
lution, a slight increase in mAP scores for small and
medium objects was observed, and for the 320×320
resolution, the mAP score for small objects surpassed
the baseline by +62%. However, all other mAP scores
were lower than those of the baseline models.
This suggests that for ARAS applications, espe-
cially when images are from different perspectives
and vehicles are commonly located in specific ar-
eas, the slicing strategy plays a crucial role. It
was observed that grid-based slicing resulted in most
medium-sized or close-range objects – those appear-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
578
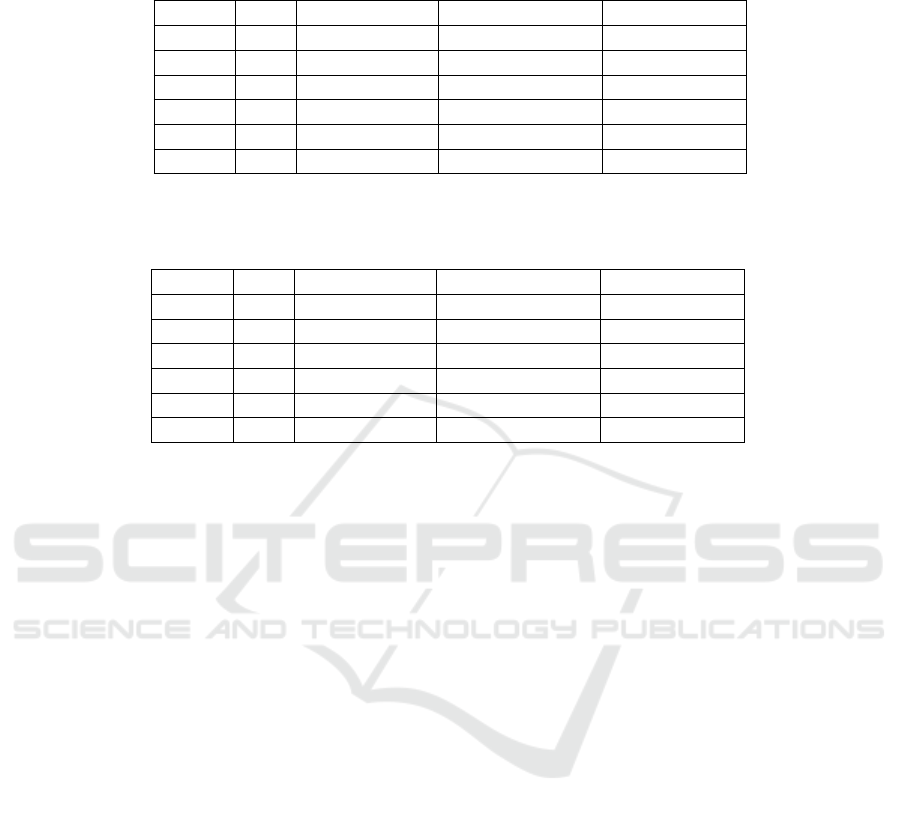
Table 3: Comparison of YOLOv8n model performance at different resolutions, comparing models with grid-based image
slicing to baseline models (*) on VisDrone-Test set. Values indicate the percentage increase (↑) or decrease (↓) compared to
the baseline model without slicing. Total number of slices is 4.
Model Slicing mAP@50 (Small) mAP@50 (Medium) mAP@50 (Large)
160×160 Yes 0.0027 ↑170% 0.0262 ↑128% 0.0720 ↓0.7%
160×160* No 0.0010 0.0115 0.0725
320×320 Yes 0.0234 ↑144% 0.1006 ↑31% 0.1834 ↓8%
320×320* No 0.0096 0.0768 0.1999
640×640 Yes 0.0625 ↑56% 0.1961 ↑4% 0.2756 ↓11.7%
640×640* No 0.0400 0.1880 0.3120
Table 4: Comparison of YOLOv8n model performance at different resolutions, comparing models with vertical image slicing
to baseline models (*) on VisDrone-Test set. Values indicate the percentage increase (↑) or decrease (↓) compared to the
baseline model without slicing. Total number of slices is 4.
Model Slicing mAP@50 (Small) mAP@50 (Medium) mAP@50 (Large)
160×160 Yes 0.0016 ↑60% 0.0190 ↑65% 0.0660 ↓9%
160×160* No 0.0010 0.0115 0.0725
320×320 Yes 0.0161 ↑68% 0.0903 ↑18% 0.1855 ↓7%
320×320* No 0.0096 0.0768 0.1999
640×640 Yes 0.0532 ↑33% 0.1944 ↑3% 0.2829 ↓9%
640×640* No 0.0400 0.1880 0.3120
ing larger – being cut abruptly across both horizon-
tal and vertical axes. Additionally, there was likely
very little background contextual information avail-
able for small objects in each image slice, negatively
affecting model performance. Conversely, with ver-
tical patches, notably at lower resolutions, small ob-
jects likely appeared whole in the image slices. The
mosaic augmentation with scale and transform aug-
mentations also helped the model achieve decent per-
formance with small and medium objects. For the
640×640 resolution model, it is likely that the res-
olution of the slices was too low, resulting in pixe-
lated features, which led to worse performance than
the baseline.
6.2 Small/Distant Object Detection
Using Image Centre ROI Cropping
6.2.1 Evaluation on VisDrone Test-Set
The Table 7 and Table 8 presents the mAP scores of
YOLOv8n models trained on the VisDrone dataset
with image resolutions of 160×160, 320×320, and
640×640 for small, medium, and large objects. The
column labeled “0%” indicates the baseline mAP
scores with no cropping applied (i.e., the original im-
ages), while the columns labeled “10%” to “40%”
show the mAP scores with the respective amounts of
cropping applied to the images.
The mAP scores for small and medium objects
exhibit an increasing trend as more zoom is applied
to the images. This is expected because cropping
in makes small or distant objects appear larger and
closer, which helps the model detect objects that are
otherwise challenging to identify.
However, for the model trained with 640×640 res-
olution images, the trend in mAP scores for large ob-
jects is observed to be irregular. The performance
slightly decreased during the first cropping iteration
(10% crop), then increased slightly more during the
20% crop iteration. Following that, a decreasing
trend is observed in the subsequent cropping itera-
tions (30% and 40% crop). This lower detection per-
formance for large objects could be a result of context
loss due to aggressive cropping. Additionally, since
the model is not familiar with images with such high
levels of cropping, which can be inferred from the
image augmentation parameters used during training,
the model showed decreased performance.
A possible explanation for this irregular trend is
that excessive cropping may cause large objects to ex-
ceed the receptive field of the model’s convolutional
layers. When objects become too large relative to the
input dimensions, the model might struggle to capture
the entire object within its feature maps, leading to
incomplete or fragmented detections. Moreover, ag-
gressive cropping can crop out essential contextual in-
formation surrounding large objects, which is crucial
for accurate detection and classification. The combi-
nation of these factors could disrupt the model’s abil-
ity to generalize well on large objects at higher crop-
ping levels, resulting in the observed fluctuations in
Enhancing Small Object Detection in Resource-Constrained ARAS Using Image Cropping and Slicing Techniques
579
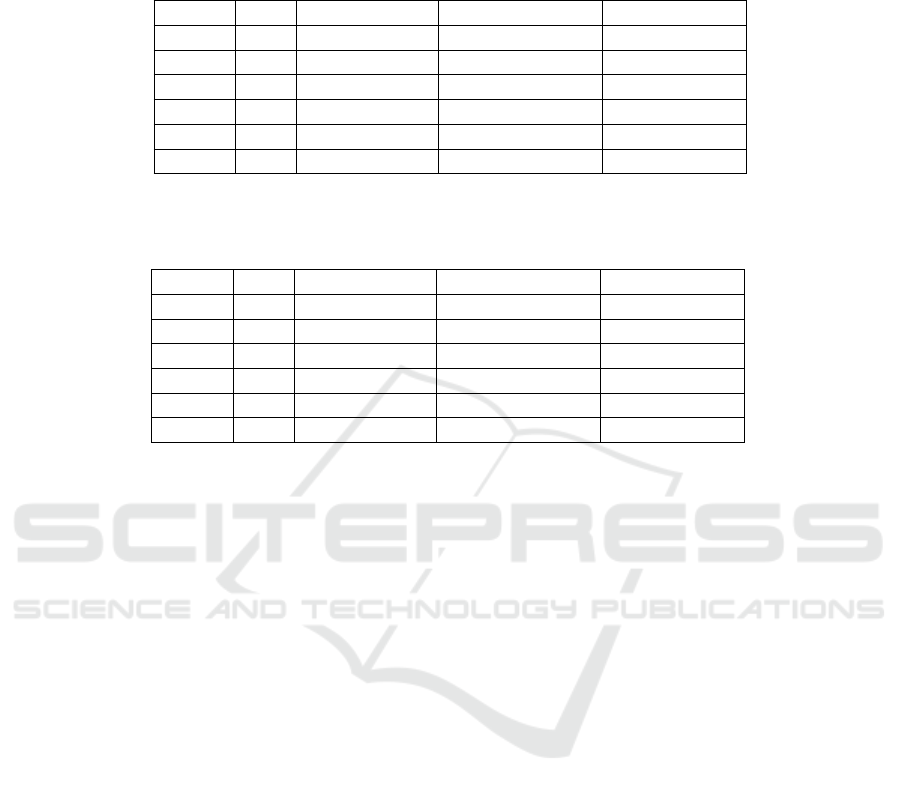
Table 5: Comparison of YOLOv8n model performance at different resolutions, comparing models with grid-based image
slicing to baseline models on KITTI-Test set. Values indicate the percentage increase (↑) or decrease (↓) compared to the
baseline model without slicing. The asterisk (*) represents baseline models with no image slicing applied. Total number of
slices is 4.
Model Slicing mAP@50 (Small) mAP@50 (Medium) mAP@50 (Large)
160×160 Yes 0.0002 ↑N/A 0.041 ↓44% 0.257 ↓36%
160×160* No 0.0000 0.073 0.400
320×320 Yes 0.094 ↓17% 0.232 ↓28% 0.447 ↓29%
320×320* No 0.113 0.320 0.627
640×640 Yes 0.334 ↓30% 0.476 ↓21% 0.625 ↓15%
640×640* No 0.474 0.601 0.738
Table 6: Comparison of YOLOv8n model performance at different resolutions, comparing models with vertical image slicing
to baseline models on KITTI-Test set. Values indicate the percentage increase (↑) or decrease (↓) compared to the baseline
model without slicing. The asterisk (*) represents baseline models with no image slicing applied. Total number of slices is 4.
Model Slicing mAP@50 (Small) mAP@50 (Medium) mAP@50 (Large)
160×160 Yes 0.026 ↑N/A 0.091 ↑25% 0.273 ↓32%
160×160* No 0.0000 0.073 0.400
320×320 Yes 0.183 ↑62% 0.240 ↓25% 0.451 ↓28%
320×320* No 0.113 0.320 0.627
640×640 Yes 0.332 ↓30% 0.456 ↓24% 0.603 ↓18%
640×640* No 0.474 0.601 0.738
performance.
6.2.2 Evaluation on KITTI Test-Set
The Table 9 and Table 10 presents the performance of
the YOLOv8n models with resolutions of 160, 320,
and 640 on the KITTI test set. For small objects, an
increasing trend in mAP scores for 160x160 resolu-
tion was observed up to the 20%-2% cropping iter-
ation. However, the score decreased from 0.044 to
0.039 (-12.82%) in the subsequent 30%-3% cropping
iteration but unexpectedly increased again in the fi-
nal 40%-4% iteration from 0.039 to 0.066 (+69.23%).
This fluctuation might be due to a coincidental devia-
tion in the aspect ratio during the 30%-3% cropping,
which adversely affected the appearance of small ob-
jects. In the last iteration, the 40%-4% cropping pos-
sibly directed the model’s focus toward areas rich
in small objects, with an aspect ratio similar to the
square aspect ratio used during training, thereby im-
proving the mAP for small objects. For 320 resolu-
tion, mAP for small objects showed increasing trend
till the 3rd iteration however, for the final iteration it
dropped down slightly than baseline (-8%).
Similarly, for the 640×640 resolution model, ex-
cessive cropping led to a decline in mAP scores for
small, medium, and large objects. It is likely that
the reduced resolution of the ROI resulted in pixe-
lated features, causing the model’s performance to be
worse than the baseline. Likewise, for medium ob-
jects at the 320×320 resolution, the mAP scores de-
clined after the second iteration through to the last
iteration, with a decrease of up to 46.3%. This sug-
gests that excessive cropping at these resolutions re-
duces the effective resolution of the objects, thereby
negatively impacting the model’s performance in both
cases.
7 CONCLUSIONS AND FUTURE
WORK
In this study, we addressed the challenge of detect-
ing small and distant objects in Advanced Rider As-
sistance Systems (ARAS) implemented on resource-
constrained hardware platforms. Recognizing that
traditional convolutional neural networks (CNNs)
struggle with small object detection due to limited
feature representation and contextual information,
we evaluated two computationally inexpensive im-
age preprocessing techniques: image center region-
of-interest (ROI) cropping and image slicing and re-
slicing. Our experiments utilized the YOLOv8-nano
model at input resolutions of 160×160, 320×320,
and 640×640 pixels, conducted on the VisDrone and
KITTI datasets.
Experiments with image center region-of-interest
(ROI) cropping on both the VisDrone and KITTI
datasets reveal a positive trend in detecting small ob-
jects as the cropping factor increases. However, ag-
gressive cropping can cause the model to miss a sub-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
580

Table 7: Comparison of YOLOv8n model performance at different resolutions and cropping factors on the VisDrone test set
(Part 1). The asterisk (*) represents baseline results with no cropping applied. The column names are in the format: crop
percentage from left/right/top – crop percentage from bottom of the image. S – Small, M – Medium, and L – Large objects.
Values indicate the percentage increase (↑) or decrease (↓) compared to the baseline.
Model/
mAP@50
0%* 10% - 1% 20% - 2%
S M L S M L S M L
160 x 160 0.001 0.011 0.072 0.001 ↑0.0% 0.019 ↑72.7% 0.115 ↑59.7% 0.003 ↑200.0% 0.037 ↑236.4% 0.115 ↑59.7%
320 x 320 0.009 0.076 0.199 0.014 ↑55.6% 0.108 ↑42.1% 0.210 ↑5.5% 0.030 ↑233.3% 0.140 ↑84.2% 0.226 ↑13.6%
640 x 640 0.040 0.188 0.312 0.059 ↑47.5% 0.227 ↑20.7% 0.302 ↓3.2% 0.088 ↑120.0% 0.243 ↑29.3% 0.345 ↑10.6%
Table 8: Comparison of YOLOv8n model performance at different resolutions and cropping factors on the VisDrone test set
(Part 2). Continuation from Table 1. Values indicate the percentage increase (↑) or decrease (↓) compared to the baseline.
Model/
mAP@50
0%* 30% - 3% 40% - 4%
S M L S M L S M L
160 x 160 0.001 0.011 0.072 0.009 ↑800.0% 0.061 ↑454.5% 0.121 ↑68.1% 0.021 ↑2000.0% 0.068 ↑518.2% 0.121 ↑68.1%
320 x 320 0.009 0.076 0.199 0.053 ↑488.9% 0.157 ↑106.6% 0.170 ↓14.6% 0.060 ↑566.7% 0.138 ↑81.6% 0.170 ↓14.6%
640 x 640 0.040 0.188 0.312 0.109 ↑172.5% 0.235 ↑25.0% 0.252 ↓19.2% 0.101 ↑152.5% 0.191 ↑1.6% 0.252 ↓19.2%
Table 9: Comparison of YOLOv8n model performance at different resolutions and cropping factors on the KITTI test set
(Part 1). The asterisk (*) represents baseline results with no cropping applied. The column names are in the format: crop
percentage from left/right/top – crop percentage from bottom of the image. S – Small, M – Medium, and L – Large objects.
Values indicate the percentage increase (↑) or decrease (↓) compared to the baseline.
Model/
mAP@50
0%* 10% – 1% 20% – 2%
S M L S M L S M L
160×160 0.000 0.073 0.400 0.009 ↑–% 0.099 ↑35.6% 0.446 ↑11.5% 0.044 ↑–% 0.141 ↑93.2% 0.463 ↑15.8%
320×320 0.113 0.320 0.627 0.139 ↑23.0% 0.360 ↑12.5% 0.654 ↑4.3% 0.172 ↑52.2% 0.369 ↑15.3% 0.619 ↓1.3%
640×640 0.474 0.601 0.738 0.484 ↑2.1% 0.605 ↑0.7% 0.744 ↑0.8% 0.533 ↑12.4% 0.577 ↓4.0% 0.675 ↓8.5%
Table 10: Comparison of YOLOv8n model performance at different resolutions and cropping factors on the KITTI test set
(Part 2). Continuation from Table 1. Values indicate the percentage increase (↑) or decrease (↓) compared to the baseline.
Model/
mAP@50
0%* 30% – 3% 40% – 4%
S M L S M L S M L
160×160 0.000 0.073 0.400 0.039 ↓–% 0.114 ↑56.2% 0.351 ↓12.3% 0.066 ↑–% 0.121 ↑65.8% 0.029 ↓92.8%
320×320 0.113 0.320 0.627 0.183 ↑61.9% 0.282 ↓11.9% 0.490 ↓21.9% 0.104 ↓8.0% 0.172 ↓46.3% 0.052 ↓91.7%
640×640 0.474 0.601 0.738 0.291 ↓38.6% 0.453 ↓24.6% 0.580 ↓21.4% 0.059 ↓87.5% 0.112 ↓81.4% 0.086 ↓88.3%
stantial number of large objects located outside the
cropped area, leading to a decline in detection per-
formance for such object sizes. Excessive cropping
narrows the field of view, missing many medium and
large objects, highlighting the need for balanced crop-
ping levels to optimize detection across different ob-
ject scales. Similarly, image slicing and re-slicing
demonstrate strong improvements in detecting small
objects, particularly with the grid-based slicing strat-
egy on the VisDrone dataset, where performance sur-
passes the baseline. However, on the KITTI dataset,
while improvements are seen for small objects at
lower resolutions, image slicing adversely affects the
detection of medium and large objects, as fragmenta-
tion at slice borders impacts their visibility.
There are some limitations of these techniques as
well. Even though they are computationally efficient,
especially the image slicing-reslicing technique uti-
lized in this work adds 4x CPU latency—considering
the inference is running on a CPU and the four slices
must be processed individually in sequence when de-
ployed in ARAS systems. Therefore, the tradeoff be-
tween detection accuracy and latency should be stud-
ied. Both techniques can negatively impact perfor-
mance depending on the camera perspective and the
specific application objectives.
To reconcile the need for improved small object
detection for ARAS applications with the constraints
of limited hardware resources, future research could
explore adaptive techniques that dynamically adjust
Enhancing Small Object Detection in Resource-Constrained ARAS Using Image Cropping and Slicing Techniques
581

the cropping level based on the speed of the ego ve-
hicle. Implementing a multi-task learning approach
using more advanced and precise image segmenta-
tion models can make object detection models more
aware of the scene context, especially for distant ob-
jects. Additionally, incorporating advanced data aug-
mentation strategies during training, such as simu-
lated zooming and context-aware slicing, could en-
hance the model’s robustness to varying object scales
and appearance without incurring runtime computa-
tional costs.
ACKNOWLEDGEMENTS
This research was conducted with the financial sup-
port of Research Ireland (12/RC/2289 P2), at the Re-
search Ireland Insight Centre for Data Analytics at
Dublin City University, and Luna Systems. We would
like to express our gratitude to Luna Systems for their
invaluable support throughout the course of this re-
search.
REFERENCES
(2024). Germany: E-scooter accidents and fa-
talities on the rise – DW – 07/26/2024
— dw.com. https://www.dw.com/en/
germany-e-scooter-accidents-and-fatalities-on-the-rise/
a-69775992. [Accessed 22-10-2024].
Ait-Moula, A., Riahi, E., and Serre, T. (2024). Effect of ad-
vanced rider assistance system on powered two wheel-
ers crashes. Heliyon, 10(4).
Akyon, F. C., Altinuc, S. O., and Temizel, A. (2022). Slic-
ing aided hyper inference and fine-tuning for small ob-
ject detection. In 2022 IEEE International Conference
on Image Processing (ICIP), pages 966–970. IEEE.
Bai, Y., Zhang, Y., Ding, M., and Ghanem, B. (2018). Sod-
mtgan: Small object detection via multi-task genera-
tive adversarial network. In Proceedings of the Eu-
ropean conference on computer vision (ECCV), pages
206–221.
Borrego-Carazo, J., Castells-Rufas, D., Biempica, E., and
Carrabina, J. (2020). Resource-constrained machine
learning for adas: A systematic review. IEEE Access,
8:40573–40598.
Chen, C., Zhang, Y., Lv, Q., Wei, S., Wang, X., Sun, X., and
Dong, J. (2019). Rrnet: A hybrid detector for object
detection in drone-captured images. In Proceedings of
the IEEE/CVF international conference on computer
vision workshops, pages 0–0.
Chen, D., Hosseini, A., Smith, A., Nikkhah, A. F., Heydar-
ian, A., Shoghli, O., and Campbell, B. (2024). Per-
formance evaluation of real-time object detection for
electric scooters. arXiv preprint arXiv:2405.03039.
Du, D., Zhu, P., Wen, L., Bian, X., Lin, H., Hu, Q., Peng,
T., Zheng, J., Wang, X., Zhang, Y., et al. (2019).
Visdrone-det2019: The vision meets drone object de-
tection in image challenge results. In Proceedings of
the IEEE/CVF international conference on computer
vision workshops, pages 0–0.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Ghiasi, G., Lin, T.-Y., and Le, Q. V. (2019). Nas-fpn:
Learning scalable feature pyramid architecture for ob-
ject detection. In Proceedings of the IEEE/CVF con-
ference on computer vision and pattern recognition,
pages 7036–7045.
Guo, L., Liu, H., Pang, Z., Luo, J., and Shen, J. (2024).
Optimizing yolo algorithm for efficient object de-
tection in resource-constrained environments. In
2024 IEEE 4th International Conference on Elec-
tronic Technology, Communication and Information
(ICETCI), pages 1358–1363. IEEE.
Hong, M., Li, S., Yang, Y., Zhu, F., Zhao, Q., and Lu, L.
(2021). Sspnet: Scale selection pyramid network for
tiny person detection from uav images. IEEE geo-
science and remote sensing letters, 19:1–5.
Jocher, G., Qiu, J., and Chaurasia, A. (2023). Ultralytics
YOLO.
Kisantal, M. (2019). Augmentation for small object detec-
tion. arXiv preprint arXiv:1902.07296.
Li, J., Liang, X., Wei, Y., Xu, T., Feng, J., and Yan, S.
(2017). Perceptual generative adversarial networks for
small object detection. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1222–1230.
Li, K., Wang, Y., and Hu, Z. (2023). Improved yolov7
for small object detection algorithm based on atten-
tion and dynamic convolution. Applied Sciences,
13(16):9316.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Com-
puter Vision–ECCV 2014: 13th European Confer-
ence, Zurich, Switzerland, September 6-12, 2014, Pro-
ceedings, Part V 13, pages 740–755. Springer.
Liu, S., Qi, L., Qin, H., Shi, J., and Jia, J. (2018). Path ag-
gregation network for instance segmentation. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 8759–8768.
Liu, Y., Sun, P., Wergeles, N., and Shang, Y. (2021). A
survey and performance evaluation of deep learning
methods for small object detection. Expert Systems
with Applications, 172:114602.
Ma, S., Lu, H., Liu, J., Zhu, Y., and Sang, P. (2024). Layn:
Lightweight multi-scale attention yolov8 network for
small object detection. IEEE Access.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
582

Tang, S., Zhang, S., and Fang, Y. (2024). Hic-yolov5: Im-
proved yolov5 for small object detection. In 2024
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 6614–6619. IEEE.
Wang, M., Yang, W., Wang, L., Chen, D., Wei, F., KeZiEr-
BieKe, H., and Liao, Y. (2023). Fe-yolov5: Feature
enhancement network based on yolov5 for small ob-
ject detection. Journal of Visual Communication and
Image Representation, 90:103752.
Yang, Z., Wang, X., Wu, J., Zhao, Y., Ma, Q., Miao, X.,
Zhang, L., and Zhou, Z. (2022). Edgeduet: Tiling
small object detection for edge assisted autonomous
mobile vision. IEEE/ACM Transactions on Network-
ing, 31(4):1765–1778.
Zhao, H., Zhang, H., and Zhao, Y. (2023). Yolov7-sea:
Object detection of maritime uav images based on
improved yolov7. In Proceedings of the IEEE/CVF
winter conference on applications of computer vision,
pages 233–238.
Zhao, M., Cheng, L., Yang, X., Feng, P., Liu, L., and Wu,
N. (2019). Tbc-net: A real-time detector for infrared
small target detection using semantic constraint. arXiv
preprint arXiv:2001.05852.
Enhancing Small Object Detection in Resource-Constrained ARAS Using Image Cropping and Slicing Techniques
583
