
VLLM Guided Human-Like Guidance Navigation Generation
Masaki Nambata
1 a
, Tsubasa Hirakawa
1 b
, Takayoshi Yamashita
1 c
, Hirobobu Fujiyoshi
1 d
,
Takehito Teraguchi
2 e
, Shota Okubo
2
and Takuya Nanri
2 f
1
Chubu University, 1200 Matsumoto-cho Kasugai, Aichi, Japan
2
Nissan Motor Co., Ltd., 2 Takara-cho Kanawgawa-ku Yokohama-shi, Kanagawa, Japan
{masaknanbt, hirakawa}@mprg.cs.chubu.ac.jp, {takayoshi, fujiyoshi}@isc.chubu.ac.jp, {shota-ohkubo, t-nanri,
Keywords:
Driver’s Assistance System, Vision and Language Model, Evaluation Method.
Abstract:
In the field of Advanced Driver Assistance Systems (ADAS), car navigation systems have become an essential
part of modern driving. However, the guidance provided by existing car navigation systems is often difficult
to understand, making it difficult for drivers to understand solely through voice instructions. This challenge
has led to growing interest in Human-like Guidance (HLG), a task focused on delivering intuitive navigation
instructions that mimic the way a passenger would guide a driver. Despite this, previous studies have used
rule-based systems to generate HLG datasets, which have resulted in inflexible and low-quality due to limited
textual representation. In contrast, high-quality datasets are crucial for improving model performance. In this
study, we propose a method to automatically generate high-quality navigation sentences from image data using
a Large Language Model with a novel prompting approach. Additionally, we introduce a Mixture of Experts
(MoE) framework for data cleaning to filter out unreliable data. The resulting dataset is both expressive and
consistent. Furthermore, our proposed MoE evaluation framework makes it possible to perform appropriate
evaluation from multiple perspectives, even for complex tasks such as HLG.
1 INTRODUCTION
Advanced Driver Assistance Systems (ADAS) aim to
develop technologies that enhance driver safety and
comfort. Car navigation systems, a key component
of ADAS, have become indispensable in daily life.
These systems typically generate navigation instruc-
tions based on GPS and map data, producing direc-
tions such as “Turn left at the intersection 100 me-
ters ahead.” However, distance-based guidance can
be challenging to interpret using voice instructions
alone, often requiring drivers to check the in-vehicle
display, which leads to distractions. Recently, navi-
gation systems have started to use Geographic Infor-
mation System (GIS) data to enhance instructions by
incorporating landmarks like traffic lights (e.g., “Turn
left at the next traffic light”). While helpful, GIS data
can quickly become outdated, causing confusion for
a
https://orcid.org/0009-0006-4903-203X
b
https://orcid.org/0000-0003-3851-5221
c
https://orcid.org/0000-0003-2631-9856
d
https://orcid.org/0000-0001-7391-4725
e
https://orcid.org/0009-0000-4719-5739
f
https://orcid.org/0009-0001-4592-590X
Figure 1: Overview of the flow of the proposed method.The
proposed method generates a dataset of guidance sentences
using the Human-like Thought Few-shot Chain-of-Thought
prompting (HLTFC) method, followed by filtering through
the Mixture of Experts (MoE)-based data cleaning frame-
work.
drivers and failing to fully address the challenges of
providing intuitive guidance. Outdated or inaccurate
data can increase driver stress, potentially leading to
accidents and traffic congestion(Barrow, 1991).
In contrast, the next generation of car navigation
systems, HLG (Human-like Guidance), is expected to
become a reality. HLG is a task aimed at provid-
ing navigation that can be intuitively understood by
the driver, similar to guidance provided by a passen-
ger. By presenting the target intersection in a way
456
Nambata, M., Hirakawa, T., Yamashita, T., Fujiyoshi, H., Teraguchi, T., Okubo, S. and Nanri, T.
VLLM Guided Human-Like Guidance Navigation Generation.
DOI: 10.5220/0013191100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
456-463
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

that the driver can intuitively comprehend based on
the scene in front of them, HLG addresses the is-
sues present in existing car navigation systems. Pre-
vious research proposed an HLG dataset that included
forward-facing video from the driver’s perspective in
a simulator, gaze information of the driver, and navi-
gation sentences(Nambata et al., 2023). This dataset,
as far as we know, is the only one used in prior HLG
research. The navigation sentences in (Nambata et al.,
2023) consist of expressions like, ”Turn left at the
intersection where you see the red car,” where ob-
jects are used to describe the location of the inter-
section. It was claimed that intuitive guidance could
be constructed by determining the reference object
for navigation based on the driver’s gaze information.
However, the navigation sentences were created by
defining five template sentences in advance and se-
lecting from these templates based on contextual data
collected from the simulator. Therefore, this rule-
based dataset of navigation sentences lacks diversity
in sentence expressions and is not easily extendable to
real-world data, resulting in poor dataset quality. On
the other hand, creating datasets manually involves
high annotation costs. Additionally, when using large
numbers of annotators, such as crowd workers, it is
difficult to maintain consistency and quality in the
data. To develop more efficient and accurate models,
high-quality datasets with broad expressive power and
minimal noise are essential(Zha et al., 2023).
To address these issues, this study proposes a
method to automatically generate high-quality nav-
igation sentence datasets solely from image data.
First, we introduce a novel prompting technique that
leverages GPT-4, a vision-language model (VLLM)
with advanced image recognition and instruction-
following capabilities, to generate scene-appropriate
navigation sentences. Our method incorporates the
decision-making processes of drivers receiving navi-
gation, as analyzed by Passini et al. (Passini, 1984),
and the spatial understanding processes studied by
Evans et al. (Evans et al., 1984), structuring the
generation steps in a Chain-of-Thought (CoT) for-
mat (Wei et al., 2022). Furthermore, we refine the
few-shot learning prompts into conditional prompts
(Brown et al., 2020) to ensure consistency in the gen-
erated sentences(Brown et al., 2020). By using these
constructed prompts, consistent navigation sentences
are automatically generated from images. However,
due to the hallucination problem of LLMs, a portion
of low-quality data is still generated by our prompt-
ing method. To address this issue, we propose an au-
tomatic evaluation and data-cleaning method using a
Mixture of Experts (MoE) framework. This method
evaluates navigation sentences from multiple perspec-
tives by utilizing several LLMs with different reason-
ing processes. Multi-perspective evaluation by mul-
tiple LLMs, unreliable data is filtered out and high-
quality data is automatically generated.
Our experiments confirm the high quality of the
datasets generated using the proposed prompting and
evaluation methods. Furthermore, we quantitatively
demonstrate the impact of the proposed prompting el-
ements on the generation outcomes. In addition, the
MoE-style automatic evaluation framework can pro-
vide appropriate evaluation for complex tasks such as
HLG through appropriate prompt design and multi-
perspective evaluation.
• We propose a novel prompting method that mim-
ics human thought processes, generating consis-
tent and intuitive guidance sentences suitable for
HLG.
• We introduce an automatic evaluation method for
Vision & Language data using VLLMs, allowing
accurate assessment of complex tasks like HLG.
• We propose a framework for the automatic gener-
ation of high quality datasets using our proposed
method. It is possible to create high quality data
with little effort from image data alone. In addi-
tion, it is believed that it will be possible to re-
spond to other tasks by constructing prompts ac-
cording to our method.
• We provide a dataset for the realisation of HLG
generated by our method.
2 RELATED WORK
2.1 Datasets Creation Methods by LLM
To efficiently build high-performance AI models,
high-quality datasets are essential. Before the advent
of Large Language Models (LLMs), manual annota-
tion was the most common method, but manual data
labeling is costly and time-consuming. Annotation
by crowdworkers is problematic because of individual
differences in quality, making it difficult to maintain
consistency(Chmielewski and Kucker, 2019). Since
the emergence of LLMs, especially language mod-
els like GPT (Radford et al., 2018), which demon-
strate high performance across various domains, au-
tomated annotation using LLMs has gained attention.
It has already been reported that for text-to-text tasks
such as translation, providing GPT with appropri-
ate prompts can generate data of higher quality than
human-annotated datasets (He et al., 2024), (Oh et al.,
2023), (Yu et al., 2023). Recently, with the high
multimodal reasoning capabilities of GPT-4 (Achiam
VLLM Guided Human-Like Guidance Navigation Generation
457

et al., 2023), high-quality datasets have been created
even for vision and language tasks by designing ap-
propriate prompts (Liu et al., 2023a), (Wang et al.,
2023). Liu et al. constructed a dataset using GPT-4
to build a large-scale Vision & Language model (Liu
et al., 2023a). However, this dataset is designed using
prompts that consist of detailed captions describing
the images and bounding box information of objects
within the images, representing the images solely in
text. Therefore, it has limitations in its ability to cap-
ture the interaction between images and text. Wang et
al. created a dataset using GPT-4 Omni (Wang et al.,
2023). In addition to image data, their dataset is con-
structed by providing location information and object
category data in a conversational format within the in-
put prompt.
In the HLG task addressed in this study, a dataset
containing driver-perspective images, driver gaze in-
formation, and navigation sentences was proposed in
previous research (Nambata et al., 2023). The nav-
igation sentences are created by selecting from five
predefined template sentences, based on context data
collected in a simulator. However, such rule-based
navigation sentence datasets have poor textual vari-
ety and lack extensibility to real-world data, resulting
in low dataset quality. In this study, following prior
research by Wang et al. and other studies on auto-
matic dataset creation, we automatically generate the
dataset by designing appropriate custom prompts.
2.2 Evaluation Method for Vision &
Language Tasks
Various evaluation metrics for assessing generated
text in Vision & Language tasks have been exten-
sively studied. Early metric-based methods such as
BLEU, ROUGE, and METEOR, commonly used in
the initial stages, calculate the degree of matching
with reference data based on n-grams (Papineni et al.,
2002), (Lin, 2004), (Banerjee and Lavie, 2007). How-
ever, these methods fail to capture semantic simi-
larity and are thus unable to provide valid evalua-
tions. After the introduction of Transformer mod-
els (Vaswani et al., 2017), embedding-based meth-
ods like BERTScore (Zhang et al., 2020) and Mover-
Score (Zhao et al., 2019) were developed. While
embedding-based methods can capture semantic sim-
ilarity, they rely on ground truth data, making it dif-
ficult to obtain highly reliable evaluations. In recent
years, evaluation methods using LLMs, which do not
require ground truth data, have gained attention, and
methods such as GPTScore and G-EVAL have been
proposed (Fu et al., 2024), (Liu et al., 2023b). How-
ever, these methods evaluate the generated text itself
and are not suitable for tasks like VQA, where the re-
lationship with image information is crucial, or for the
HLG task that we are working on.
Hessei et al. proposed CLIPScore, which eval-
uates the similarity between images and text using
CLIP(Radford et al., 2021) trained on large datasets,
and confirmed that it has a high correlation with hu-
man evaluations (Hessel et al., 2021). Pranava et al.
proposed VIFIDE, which calculates the similarity be-
tween object instances in images and words in text,
and confirmed its high correlation with human judg-
ment (Madhyastha et al., 2019). Both evaluation met-
rics can assess the semantic similarity between im-
age information and text, but it is challenging to ac-
curately evaluate specialized texts such as HLG.
3 PROPOSED METHOD
Previous studies on Human-Like Guidance (HLG)
created datasets by generating various scenes us-
ing CARLA and producing corresponding naviga-
tion sentences. However, these sentences were based
solely on context data from CARLA, which limited
sentence diversity and scalability, resulting in lower
dataset quality. Manual annotation, on the other hand,
introduces challenges related to cost, consistency, and
quality. To address these issues, this study proposes
a framework to automatically generate high-quality
datasets.
3.1 Proposed Method Overview
Figure 2 shows the overview of the proposed method.
Our method consists of the following two steps.
As the first step, we initially create the guidance
text data from images and prompts using GPT-4o.
Simple prompts alone are not enough to generate ap-
propriate guidance text. To address this issue, we
propose a Human-like Thought Few-shot Chain-of-
Thought prompt (HLTFC), which take in to account
the characteristics of human-like navigation provided
by passengers.
As the second step, we further evaluate and fil-
ter the generated data. Even if we use the proposed
prompt at the previous stage, it remains difficult to
create a high-quality dataset due to issues such as hal-
lucinations inherent in LLMs. Therefore, we propose
the GPT guided Auto Cleaning Framework (G-ACF).
The G-ACF is based on a Mixture of Experts (MoE)
framework and utilizes multiple LLMs with different
input prompts.
Simple prompts, however, are insufficient for gen-
erating accurate navigation sentences. To address
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
458

Figure 2: In Step 1, we generate a consistent dataset of guidance sentences using GPT-4o and the proposed Human-like
Thought Few-shot Chain-of-Thought Prompt (HLTFC). In Step 2, the generated dataset is filtered using the GPT-guided Auto
Cleaning Framework (G-ACF). These two steps enable the automatic creation of high-quality Vision & Language datasets.
this, we propose a Human-like Thought Few-shot
Chain-of-Thought prompt (HLTFC), which takes into
account the characteristics of human-like navigation
provided by drivers or passengers. Despite using
HLTFC, the quality of the generated dataset can still
suffer from issues such as hallucinations, a common
problem in large language models (LLMs). There-
fore, we propose the GPT guided Auto Cleaning
Framework (G-ACF), a data evaluation framework in
the form of a Mixture of Experts (MoE). By employ-
ing multiple LLMs with different input prompts, this
framework evaluates the generated navigation sen-
tences from various perspectives, filtering out unre-
liable data to ensure high-quality outputs.
3.2 Human-Like Thought Few-Shot
Chain-of-Thought Prompt
HLG aims to provide navigation sentences that
drivers can intuitively understand, similar to direc-
tions given by a passenger. On the other hand, when
humans grasp space, they use surrounding objects
to judge distances and recognize the environment
(Evans et al., 1984). Therefore, it has been proven
that representing the location of target intersections
using objects makes navigation sentences easier for
drivers to understand (Burnett, 2000), (Allen, 1999),
(Tom and Denis, 2003).
From the above, the following three points are im-
portant in constructing the HLG Navigation sentence.
• Representation of intersection locations using ob-
jects
• Appropriate objects to be used in that case
• Methods of expressing sentences
In the dataset proposed by previous research on
HLG, objects representing the position of intersec-
tions were selected using driver’s gaze information.
However, the navigation sentences were created using
five predefined template sentences, which imposed
limitations on the expression of the intersection posi-
tion and the navigation sentence itself. Additionally,
since the template sentences were selected based on
context data collected from the simulator, there is a
lack of scalability to real-world data. Due to these is-
sues, the dataset from previous research is insufficient
for realizing HLG.
In response, this research creates a navigation
sentence dataset that considers three important ele-
ments in HLG. To generate appropriate navigation
sentences, we propose a Human-like Thought Few-
shot Chain-of-Thought Prompt (HLTFC), which com-
bines Chain-of-Thought (CoT) and Few-shot meth-
ods with improvements, and use GPT-4o, which has
high image recognition and instruction-following ca-
pabilities, to create the dataset. HLTFC is constructed
from a role assignments to GPT-4 Omni (GPT-4o),
conditions for generating navigation sentences, and a
step-by-step thought process. Through this, the LLM
follows the same thought process as humans when
giving directions and generates appropriate naviga-
tion sentences. First, we will give GPT-4o the role
of ‘sitting in the passenger seat and navigating the
driver’. Next, as conditions, we instruct it to use ob-
jects to represent the position of intersections, specify
the objects to be used for this representation, assume
car navigation, and make the sentences concise. The
VLLM Guided Human-Like Guidance Navigation Generation
459

objects used for this representation are, as in previ-
ous research, the objects that the driver is gazing at,
based on driver gaze information. At this point, sev-
eral examples of intersection representation are pro-
vided in a few-shot format. This allows for both ex-
plicit intersection expressions such as ”Turn left at the
intersection where the red car is” and implicit expres-
sions like ”Follow the red car and turn left.” Finally, as
a thought process for creating navigation sentences,
we present a step-by-step thought prompt based on
the decision-making process of the driver receiving
the directions and the human process of grasping the
space. With HLTFC, the LLM can follow the same
thought process as humans when giving directions,
generate human-like navigation sentences, and auto-
matically create navigation sentence data suitable for
HLG.
3.3 Filtering Data by Multiple LLMs
The quality and reliability of the dataset are critical
factors that influence model performance more than
the model structure itself. Despite the effectiveness
of HLTFC, ensuring perfect dataset quality remains
challenging due to factors like hallucinations. There-
fore, it is necessary to examine the quality of the
dataset and clean it appropriately. However, existing
data cleaning methods for datasets in Vision & Lan-
guage tasks are not well-suited for the specific domain
of scene context and Navigation sentences, as in this
research (Xu et al., 2023), (vdc, 2024). In addition,
it is difficult to appropriately evaluate the quality of
the special format of the guidance text using existing
evaluation metrics for Vision & Language tasks such
as CLIPScore and VIFIDEL.
To address this issue, we introduce GPT-4o’s pow-
erful multimodal reasoning capabilities to automati-
cally evaluate and clean the dataset. However, there
remain concerns about whether the automatic eval-
uation by LLMs is truly adequate. Therefore, in
this research, we propose a GPT-guided auto clean-
ing framework (G-ACF), a Mixture of Experts (MoE)
evaluation framework that uses multiple GPT-4os
with different evaluation processes to filter the data.
By employing multiple LLMs with different evalu-
ation processes, it becomes possible to evaluate the
data from multiple perspectives, G-ACF filters out un-
reliable labels and constructs a more diverse, high-
quality dataset.
The overview of G-ACF is shown in Figure 3. In
this research, we experimentally prepare two types of
evaluation LLMs. Before constructiong two LLMs,
based on the three points are important in construct-
ing the HLG, we establish six evaluation criteria for
assessing sentences.
• Whether the mentioned object is present
• Whether the driver’s gaze matches the object
• Whether the expression of the intersection using
the object is appropriate
• Whether the mentioned direction of travel is cor-
rect
• Whether there are any expressions that could
cause confusion regarding the direction of travel
• Whether the sentence length is appropriate for car
navigation
For the first evaluation LLM, we followed the
evaluation metrics proposed by Liu et al. and input the
above defined evaluation criteria into LLM to auto-
matically create an evaluation step prompt(Liu et al.,
2023b). Through this, the LLM evaluates the naviga-
tion sentence according to the criteria.
For the second LLM, based on the decision-
making process of drivers receiving navigation ana-
lyzed by Passini et al. (Passini, 1984), and the spatial
grasping process of humans analyzed by Evans et al.
(Evans et al., 1984), evaluation steps are constructed
and input into the LLM as a prompt. Through this,
the LLM evaluates the navigation sentence using a
thought process similar to that of a human.
Each of these evaluation LLMs follows its respec-
tive evaluation steps and assigns a score on a scale of
0 to 10 (with one decimal point). The final score is
obtained by averaging the scores from the two evalu-
ation LLMs.
4 EXPERIENCE
We conduct experiments to confirm the effectiveness
of our proposed method. First, we evaluate the qual-
ity of the dataset created by our proposed Human-
like Thought Few-shot Chain-of-Thought prompt
(HLTFC) and compare it quantitatively with datasets
created by other prompting methods. Next, we
fine-tune the VLM using the dataset created by our
data cleaning method and investigate its effectiveness
based on the model accuracy and output sentences.
4.1 Effectiveness Studies of Prompting
Methods
We investigate the effectiveness of the proposed
Human-like Thought Few-shot Chain-of-Thought
Prompt (HLTFC). For comparison, we use existing
standard prompting methods: Few-shot prompts and
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
460
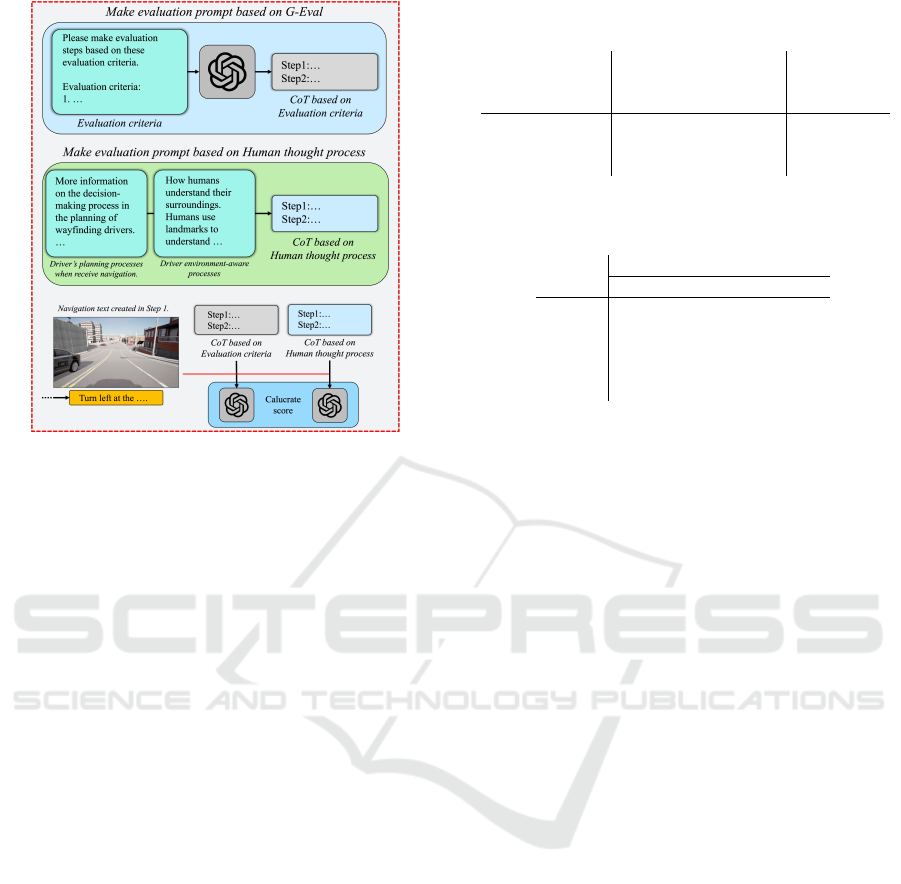
Figure 3: Overview of G-ACF. We evaluate the guidance
text using two evaluation machines: one that evaluates ac-
cording to the evaluation criteria we have constructed, and
another that evaluates according to the thought processes
used by the driver for planning and spatial awareness. We
construct a high-quality data set by performing a multi-
faceted evaluation using the two evaluation machines and
filtering out data with low scores.
Chain-of-Thought (CoT) prompts. Each prompt is
constructed by excluding elements from HLTFC. The
Few-shot prompt is created by removing the CoT el-
ement from HLTFC, while the CoT prompt is con-
structed by excluding the Few-shot element. We
quantitatively compare the navigation sentences in the
datasets created by each prompting method. Addi-
tionally, by examining the trends in the generated text
for each prompt method, we investigate the impact of
the elements that make up HLTFC.
As an evaluation method, we apply our pro-
posed G-ACF to each dataset and conduct a multi-
perspective evaluation. Since this experiment focuses
on assessing the dataset quality, traditional text-based
evaluation metrics, which require ground truth data,
are not applicable. The navigation sentences in HLG
need to evaluate the relationships between various el-
ements of the images and texts. Therefore, even met-
rics like the CLIPScore, commonly used in Vision &
Language tasks, cannot provide an adequate evalu-
ation. On the other hand, it is believed that it will
be possible to evaluate methods using GPT-4o, which
has multimodal reasoning capabilities and extensive
knowledge, by designing appropriate prompts. How-
ever, since we use custom prompts, the reliability of
automatic evaluation by LLMs still requires verifica-
tion. Therefore, by conducting multifaceted evalua-
Table 1: Quantitative comparison using each evaluation
model of G-ACF. The values are the average of all data.
Evaluation
Critica
prompt
Human
thought
prompt
Correlation
coefficient
Few-shot 8.74 8.50 0.68
CoT 9.28 9.23 0.60
HLTFC (ours) 9.58 9.27 0.68
Table 2: Some of the probability of occurrence of words
indicating intersections.
Appearance probability (%)
Few-shot CoT HLTFC
Follow 35.1 0.0 15.3
with 21.4 1.5 3.2
near 7.2 6.5 12.1
past 11.5 0.9 7.
after 3.2 0.1 2.1
tions using G-ACF, we ensure reliability.
The quantitative evaluation results are shown in 1.
From Table 1, we confirmed that our method achieved
the highest accuracy, followed by CoT, and Few-shot
in descending order of accuracy. In addition, the cor-
relation between the two evaluation models is weak
for all prompts, indicating that they are evaluating
from different perspectives. Next, we show some of
the occurrence probabilities of the words indicating
the intersection in the sentences in the data set in Ta-
ble 2. From Table 2, we observed that while Few-
shot and HLTFC exhibited a wide spread in occur-
rence probabilities, CoT showed less dispersion. In
Few-shot, the occurrence probability was high even
for cases other than the examples presented in the
prompt. In CoT, there was a tendency to frequently
use the intersection expression ”where the [Object]
is” throughout the entire dataset. These findings sug-
gest that Few-shot prompts contribute to more flexi-
ble sentence expressions, while CoT promotes higher-
quality sentence generation. Furthermore, it can be
said that HLTFC generated a dataset with rich sen-
tence diversity and expressive power.
4.2 Effectiveness Studies of G-ACF
We conducted experiments to investigate the effec-
tiveness of our proposed GPT guided Auto Clean-
ing Framework (G-ACF). Using G-ACF, we cleaned
the dataset created by HLTFC and train the VLM
model. The generation of Navigation sentences re-
quires general knowledge of driving scenes, such as
road structures. Furthermore, the ultimate goal of
HLG is in-vehicle implementation. Therefore, in this
experiment, we performed fine-tuning using LLaVA,
an open-source state-of-the-art Vision & Language
VLLM Guided Human-Like Guidance Navigation Generation
461

Figure 4: Qualitative comparison results. By combining the two evaluation models of G-ACF, it is possible to perform
appropriate evaluation.
Large Model (VLLM). For comparison, we altered
the data filtering methods in G-ACF and compared
the accuracy after fine-tuning each dataset. This is
because no suitable data cleaning method currently
exists for proper comparison in HLG tasks.
The three filtering methods are as follows:
• No filtering applied.
• Threshold set to 8 points, taking the logical OR of
the two evaluate models
• Threshold set to 8 points, taking the logical AND
of the two evaluate models
The quantitative evaluation results are shown in
Table 3. From Table 3, we confirmed that filtering
using logical OR and logical AND is highly accurate.
As the qualitative comparison, we show the gener-
ated sentence from the trained LLaVA model in Fig-
ure 4. In this example, we show the results of the
model trained on the OR filtered data, which had the
highest accuracy. As in previous experiments, we
adopt the G-ACF method we have proposed to eval-
uate the output sentences from multiple perspectives.
Figure 4(a) presents an example where both evalua-
tion models judged the guidance sentence to be highly
accurate. The generated navigation sentence which
references a “the red car” traveling ahead in the same
direction, is intuitive and appropriate for the driver,
confirming the correct evaluation. Figure 5(b) shows
an example where one evaluation model rated the sen-
tence highly, while the other rated it less accurate.
The sentence used the verb “follow” in relation to a
vehicle that had stopped and was traveling in the op-
posite direction. This is clearly an inappropriate in-
struction. This is a sample that has been evaluated
correctly through a multi-perspective evaluation us-
ing two evaluation models. From these results, we
can say that the cooperative evaluation method using
multiple LLM in the G-ACF that we proposed is ef-
Table 3: Accuracy comparison of the fine-tuned model us-
ing datasets filtered by different methods. The G-ACF val-
ues represent the average scores from the two evaluation
models.
Evaluation
Critica
prompt
Human
thought
prompt
G-ACF
No filltered data 8.96 8.92 8.94
OR fillterd data 9.18 9.29 9.24
AND fillterd data 9.11 9.18 9.14
fective.
5 CONCLUSIONS
In this research, we propose a method to automati-
cally create a high-quality navigation sentence dataset
solely from image data, aiming to realize HLG. First,
we utilized GPT-4o to automatically generate naviga-
tion sentence data through our proposed prompting
method. Experiments confirmed the effectiveness of
our prompting method and the impact of each element
within the prompt. Next, we constructed a data eval-
uation framework in the MoE format to automatically
clean the generated data. The experiments showed
that our proposed method is capable of providing ap-
propriate evaluations even for complex tasks such as
HLG. In the future, it will be necessary to focus on
lightweighting and speeding up for implementation in
real-world vehicle environments.
REFERENCES
(2024). Vdc: Versatile data cleanser based on visual-
linguistic inconsistency by multimodal large language
models. International Conference on Learning Rep-
resentations (ICLR).
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
462

Achiam, J., Adler, S., and et al (2023). Gpt-4 technical
report. Preprint.
Allen, G. L. (1999). Cognitive abilities in the service of
wayfinding: A functional approach. Professional Ge-
ographer.
Banerjee, S. and Lavie, A. (2007). Meteor: An automatic
metric for mt evaluation with improved correlation
with human judgments. Proceedings of the Second
Workshop on Statistical Machine Translation.
Barrow, K. (1991). Human factors issues surrounding the
implementation of in-vehicle navigation and informa-
tion systems. SAE Transactions.
Brown, T. B., Mann, B., Ryder, N., Subbiah, M., Kaplan, J.,
Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G.,
Askell, A., Agarwal, S., Herbert-Voss, A., Krueger,
G., Henighan, T., Child, R., Ramesh, A., Ziegler,
D. M., Wu, J., Winter, C., Hesse, C., Chen, M., Sigler,
E., Litwin, M., Gray, S., Chess, B., Clark, J., Berner,
C., McCandlish, S., Radford, A., Sutskever, I., and
Amodei, D. (2020). Language models are few-shot
learners. Advances in Neural Information Processing
Systems 33 (NeurIPS).
Burnett, G. (2000). ‘turn right at the traffic lights’:the re-
quirement for landmarks in vehicle navigation sys-
tems. The Journal of Navigation.
Chmielewski, M. and Kucker, S. C. (2019). An mturk cri-
sis? shifts in data quality and the impact on study re-
sults. Social Psychological and Personality Science.
Evans, G. W., Skorpanich, M. A., G
¨
arling, T., Bryant,
K. J., and Bresolin, B. (1984). The effects of pathway
configuration, landmarks and stress on environmental
cognition. Journal of Environmental Psycholog.
Fu, J., Ng, S.-K., Jiang, Z., and Liu, P. (2024). Gptscore:
Evaluate as you desire. North American Chapter of
the Association for Computational Linguistics: Hu-
man Language Technologies.
He, X., Lin, Z., Gong, Y., Jin, A.-L., Zhang, H., Lin, C.,
Jiao, J., Yiu, S. M., Duan, N., and Chen, W. (2024).
Annollm: Making large language models to be better
crowdsourced annotators. Annual Conference of the
North American Chapter of the Association for Com-
putational Linguistics (NAACL).
Hessel, J., Holtzman, A., Forbes, M., Bras, R. L., and Choi,
Y. (2021). Clipscore: A reference-free evaluation met-
ric for image captioning. Empirical Methods in Natu-
ral Language Processing (EMNLP).
Lin, C.-Y. (2004). Rouge: A package for automatic evalu-
ation of summaries. In Proceedings of the Workshop
on Text Summarization Branches Out (WAS).
Liu, H., Li, C., Wu, Q., and Lee, Y. J. (2023a). Visual
instruction tuning. Advances in Neural Information
Processing Systems 36 (NeurIPS).
Liu, Y., Iter, D., Xu, Y., Wang, S., Xu, R., and Zhu, C.
(2023b). G-eval: Nlg evaluation using gpt-4 with bet-
ter human alignment. Empirical Methods in Natural
Language Processing (EMNLP).
Madhyastha, P., Wang, J., and Specia, L. (2019). Vifidel:
Evaluating the visual fidelity of image descriptions.
Association for Computational Linguistics (ACL).
Nambata, M., Shimomura, K., Hirakawa, T., Yamashita, T.,
and Fujiyoshi, H. (2023). Human-like guidance with
gaze estimation and classification-based text genera-
tion. International Conference on Intelligent Trans-
portation Systems (ITSC).
Oh, S., Lee, S. A., and Jung, W. (2023). Data augmen-
tation for neural machine translation using generative
language model. arXiv:2307.16833.
Papineni, K., Roukos, S., Ward, T., and Zhu, W.-J. (2002).
Bleu: a method for automatic evaluation of machine
translation. Annual Meeting of the Association for
Computational Linguistics (ACL).
Passini, R. (1984). Spatial representations, a wayfinding
perspective. Journal of environmental psychology.
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., Krueger, G., and Sutskever, I. (2021). Learning
transferable visual models from natural language su-
pervision. arXiv:2103.00020.
Radford, A., Narasimhan, K., Salimans, T., and Sutskever,
I. (2018). Improving language understanding by gen-
erative pre-training. Preprint.
Tom, A. and Denis, M. (2003). Referring to landmark or
street information in routedirections: What difference
does it make? COSIT 2003 Lecture Notes in Com-
puter Science 2825.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2017). Attention is all you need. Advances in Neural
Information Processing Systems 30 (NIPS).
Wang, J., Meng, L., Weng, Z., He, B., Wu, Z., and Jiang, Y.-
G. (2023). To see is to believe: Prompting gpt-4v for
better visual instruction tuning. arXiv:2311.07574.
Wei, J., Wang, X., Schuurmans, D., Bosma, M., Ichter, B.,
Xia, F., Chi, E., Le, Q., and Zhou, D. (2022). Chain-
of-thought prompting elicits reasoning in large lan-
guage models. Advances in Neural Information Pro-
cessing Systems 35 (NeurIPS).
Xu, H., Xie, S., Huang, P.-Y., Yu, L., Howes, R., Ghosh,
G., Zettlemoyer, L., and Feichtenhofer, C. (2023). Cit:
Curation in training for effective vision-language data.
International Conference on Computer Vision (ICCV).
Yu, Y., Zhuang, Y., Zhang, J., Meng, Y., Ratner, A., Kr-
ishna, R., Shen, J., and Zhang, C. (2023). Large lan-
guage model as attributed training data generator: A
tale of diversity and bias. Advances in Neural Infor-
mation Processing Systems 36 (NeurIPS).
Zha, D., Bhat, Z. P., Lai, K.-H., Yang, F., and Hu, X. (2023).
Data-centric ai: Perspectives and challenges. In Pro-
ceedings of the 2023 SIAM International Conference
on Data Mining(SDM).
Zhang, T., Kishore, V., Wu, F., Weinberger, K. Q., and
Artzi, Y. (2020). Bertscore: Evaluating text genera-
tion with bert. International Conference on Learning
Representations (ICLR).
Zhao, W., Peyrard, M., Liu, F., Gao, Y., Meyer, C. M., and
Eger, S. (2019). Moverscore: Text generation evaluat-
ing with contextualized embeddings and earth mover
distance. Empirical Methods in Natural Language
Processing (EMNLP).
VLLM Guided Human-Like Guidance Navigation Generation
463
