
CrowdSim++: Unifying Crowd Navigation and Obstacle Avoidance
Marco Rosano
1
, Danilo Leocata
1
, Antonino Furnari
1,2
and Giovanni Maria Farinella
1,2
1
FPV@IPLAB, Department of Mathematics and Computer Science, University of Catania, Catania, Italy
2
Next Vision s.r.l., Catania, Italy
Keywords:
Crowd Navigation, Reinforcement Learning, Obstacle Avoidance, Crowd Simulator.
Abstract:
In recent years, significant advancements in learning-based technologies have propelled the development of
autonomous robotic systems designed to assist humans in challenging scenarios during their daily activi-
ties. This research focuses on enhancing robotic perception and control, particularly in navigating complex,
crowded environments. Traditional approaches often treat static and dynamic components separately, limiting
the robots’ real-world performance. We propose CrowdSim++, an extension of the open-source CrowdSim
simulator (Chen et al., 2019), to unify crowd navigation and obstacle avoidance. CrowdSim++ enables training
navigation policies in dynamically generated environments or real-world floor plans, using a 2D lidar sensor
and a “person sensor” for enhanced perception. Our experiments demonstrate that Reinforcement Learning-
based navigation policies trained in complex environments with humans outperform those trained in simpler
scenarios. Additionally, providing robots with specialized sensors to accurately distinguish between static and
dynamic obstacles is essential for achieving superior performance. To advance research in autonomous navi-
gation, the source code and dataset of realistic floor plans are available at the following link.
1 INTRODUCTION
In recent years, there has been significant progress
in developing learning-based technologies for robotic
systems, aiming to create autonomous agents capa-
ble of assisting humans in their daily activities (Chen
et al., 2013; Miller, 2006). Research in this field has
particularly focused on various sub-problems related
to the development of complex robotic agents, includ-
ing perception for action through algorithms process-
ing data acquired via cameras and other sensors (Chen
et al., 2021), mechanical arm control (Dong and
Zhang, 2023), and navigation (Otte, 2015). Notably,
considerable efforts have been made to combine per-
ception and control to perform complex operations
across different environments (Yaar et al., 2024).
Several learning-based solutions have emerged to
address the autonomous navigation problem, enabling
robots to plan and execute routes to destinations with-
out relying on environmental maps (Savva et al.,
2019) or even amidst moving people in crowded set-
tings (Chen et al., 2019). These navigation models
are typically trained in simulated environments (Otte,
2015), providing a wide variety of navigation sce-
narios essential for learning optimal navigation poli-
cies, avoiding the difficulties of learning from real ob-
servations. Indeed, collecting this experience in the
real world would be impractical due to the time re-
quired and the fragility and cost of the robot’s hard-
ware (Rosano et al., 2023).
Navigating crowded environments is of particular
interest as it represents a fundamental requirement for
designing robotic systems that operate alongside hu-
mans in real environments (M
¨
oller et al., 2021). De-
spite the significant progress in autonomous naviga-
tion, the design of systems for crowded environments
has often approached the dynamic component (mov-
ing people) separately from the static component (en-
vironment layout) (Chen et al., 2017).
While previous works have addressed point-goal
robot navigation and crowded navigation as separate
tasks (Mavrogiannis et al., 2023), we postulate that a
robot can benefit from learning to perform both tasks
simultaneously. This approach leverages the inter-
actions between humans and the environment (e.g.,
humans won’t collide with walls), leading to more
effective navigation strategies. Specifically, we pro-
pose to train a navigation policy in simulated envi-
ronments that mirror the complexity of real-world set-
tings, providing the perceptual capabilities necessary
to address the navigation challenges. To support our
investigation, we propose CrowdSim++, which ex-
Rosano, M., Leocata, D., Furnari, A. and Farinella, G. M.
CrowdSim++: Unifying Crowd Navigation and Obstacle Avoidance.
DOI: 10.5220/0013192300003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 533-542
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
533
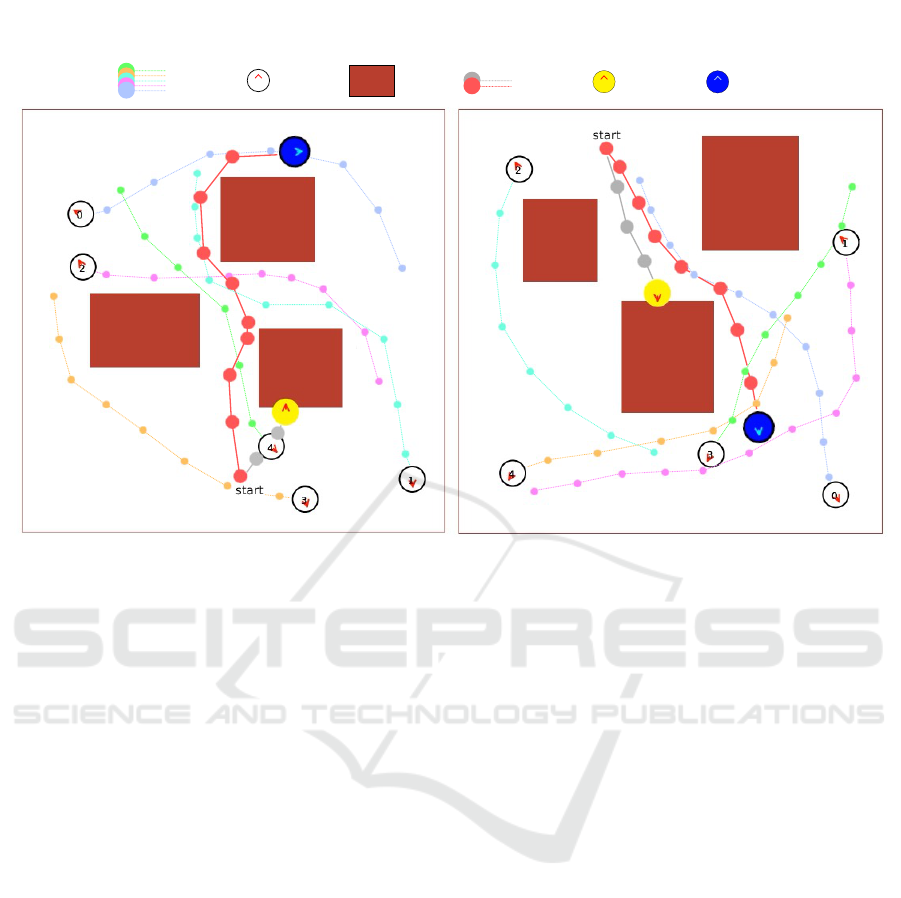
Navigation episodes in randomly generated environments with 3 obstacles
Humans
trajectories
Human
Robot
without lidar
Robots
trajectories
Robot
with lidar
Obstacle
Humans
trajectories
Human
Robot
without lidar
Robots
trajectories
Robot
with lidar
Obstacle
Figure 1: The proposed CrowdSim++ simulator enables the training of policies for crowd navigation in complex environments
with both obstacles and moving humans. The robot equipped only with the “person sensor” (yellow circle, gray trajectory)
lacks awareness of the environment’s layout and exhibits limited performance, even when trained in contexts similar to the test
scenario. In contrast, the robot equipped with both the “person sensor” and lidar sensor (blue circle, red trajectory) successfully
avoids collisions with static and dynamic obstacles and reaches the goal effectively. The figure represents snapshots of the
concluded navigation episodes.
tends the functionality of the CrowdSim open-source
simulator (Chen et al., 2019) to set crowd navigation
in randomly generated complex environments or in
environments derived from real-world floor plans. In
the first case, the environments are generated with a
variable number of obstacles of different sizes to cre-
ate scenarios with various levels of complexity. In the
second case, we reproduce floor plans from real envi-
ronments using the popular Gibson dataset (Xia et al.,
2018), enabling realistic navigation scenarios. To en-
able the robot’s perception of its surroundings, we im-
plemented a 2D lidar sensor that provides informa-
tion on the distance of obstacles in the environment.
This setup mirrors realistic scenarios where a robot
is equipped with lidar to support navigation. Figure 1
shows examples of navigation episodes performed us-
ing the proposed simulator.
To validate our claims and show the usefulness of
CrowdSim++, we train and evaluate different naviga-
tion policies based on Reinforcement Learning (Chen
et al., 2019; Chen et al., 2017) in various complex sce-
narios and compare their performance with the same
baselines trained in simpler environments. Our results
demonstrate that navigation models significantly ben-
efit from training in more challenging settings. Addi-
tionally, equipping robots with proper perception abil-
ities that can clearly observe and differentiate between
static and dynamic obstacles is crucial for achieving
superior performance.
The contributions of this work are as follows:
• we propose CrowdSim++, an extended version
of the CrowdSim simulator (Chen et al., 2019)
for training learning-based navigation models in
crowded environments with complex geometry.
The simulator supports the dynamic generation of
environments or the import of floor plans from
real environments and, in addition to the “human
sensor” originally included in CrowdSim (Chen
et al., 2019), includes the use of a lidar sensor,
necessary for the robot to perceive its surround-
ings;
• we demonstrate that navigation policies trained in
simpler environments exhibit limited generaliza-
tion ability when applied to more complex lay-
outs. Through experiments, we show that training
navigation models in complex environments with
moving humans is essential for developing effec-
tive navigation policies.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
534

• we publicly release the simulator’s source code
along with a floor plan dataset of real-world en-
vironments to facilitate the development of ad-
vanced navigation systems for complex, crowd-
filled scenarios.
2 RELATED WORK
Crowd Navigation Systems. In the context of au-
tonomous navigation in crowded environments, var-
ious systems have been proposed over the years to
manage the dynamic nature of space configurations.
A common approach involves considering pedestrians
with simple kinematics, moving at a constant speed
along mostly straight trajectories. Reactive methods
adopt this assumption and make decisions based on
one-step interaction rules to avoid collisions in the im-
mediate future (Van den Berg et al., 2008). However,
they fail to model human behavior or the future evo-
lution of the environment, often resulting in unnatural
behaviors and the “freezing robot” problem (P
´
erez-
D’Arpino et al., 2021), where the planner halts and
repeatedly replans the actions to be taken. To ad-
dress these limitations, other methods aim to under-
stand human intentions in terms of trajectory and des-
tination, to capture a long-term vision of the environ-
ment’s evolution (Kuderer et al., 2012).
Recent advancements in deep learning have sig-
nificantly impacted the field of robot navigation (Otte,
2015). This new approach facilitates learning nav-
igation policies from demonstrations of desired be-
havior in an end-to-end manner, starting from the
robot’s raw observations. Imitation Learning and Be-
havior Cloning strategies leverage expert supervision
to train deep models in a supervised manner (Bo-
jarski et al., 2016). Nevertheless, these systems of-
ten struggle to generalize beyond the scenarios en-
countered during training. To overcome the prob-
lem, new systems based on Reinforcement Learning
(RL) have emerged, capable of autonomously collect-
ing the necessary experience within simulated envi-
ronments (Rosano et al., 2021; Zhu and Zhang, 2021).
These systems have proven effective for learning from
large amounts of simulated data (Savva et al., 2019).
Nevertheless, these methods are often trained in static
environments without moving people. Concurrent re-
search has focused on developing methods for nav-
igation in crowded environments, utilizing simula-
tion systems that can mimic human movement, al-
beit with simplistic dynamics (P
´
erez-D’Arpino et al.,
2021). For instance, Chen et al. (Chen et al., 2017)
proposed an RL-based model that encodes the esti-
mated time to the goal given the positions and veloc-
ities of neighbors. Meanwhile, the authors of (Chen
et al., 2019) introduced a method to capture crowd-
robot interactions in the presence of many humans
using a self-attention system to estimate their influ-
ence on future states. Unfortunately, most of these
approaches involve humans isolated from the environ-
mental context, and only a limited number of methods
have addressed the problem using environments with
more complex geometries (Liu et al., 2020). In this
work, we demonstrate that navigation policies trained
in simpler struggle when applied to more complex
layouts, and that training navigation models in real-
istic contexts—featuring both static and dynamic ob-
stacles—can be advantageous for learning advanced
navigation policies, leveraging the capabilities of the
proposed simulator.
Simulators and Datasets for Navigation Systems.
Simulators are fundamental tools for developing
robotic navigation systems. Historically, due to the
scarcity of advanced simulation platforms, many re-
searchers used simple, ad-hoc simulators (Chen et al.,
2017) or commercial products (Staranowicz and Mar-
iottini, 2011). More recently, advanced tools capable
of simulating human presence and human-robot inter-
actions have been developed and made freely avail-
able to the scientific community (M
¨
oller et al., 2021).
The usability of these simulators has been greatly en-
hanced by their integration with robotic middleware
that provides a unified environment for using vari-
ous robot software (Quigley et al., 2009) . The rise
of deep learning systems and the success of Rein-
forcement Learning methods in robotics have spurred
a rapid adoption of simulation systems capable of
handling large-scale datasets (Zhu and Zhang, 2021).
One area of focus has been the development of pho-
torealistic simulators (Savva et al., 2019; Xia et al.,
2018), which utilize manually reconstructed indoor
environments (Khanna et al., 2024) or those captured
using 3D scanners (Xia et al., 2018). In this context,
the fidelity of virtual images-ensuring they accurately
reflect the characteristics of real-world images-is cru-
cial for applying the navigation system in real envi-
ronments. Concurrently, efforts have concentrated on
simulators designed for crowd navigation, capable of
realistically simulating human movement within re-
constructed environments (Chen et al., 2019; Kuderer
et al., 2012). These simulators typically employ high-
level sensors, thus they focused more on emulating
human movement than on visual rendering (Van den
Berg et al., 2008; Chen et al., 2019). However, only
few studies have explored joint scenarios involving
navigation in complex environments alongside human
presence (Liu et al., 2020). In contrast to previous
studies (Cancelli et al., 2023; P
´
erez-D’Arpino et al.,
CrowdSim++: Unifying Crowd Navigation and Obstacle Avoidance
535
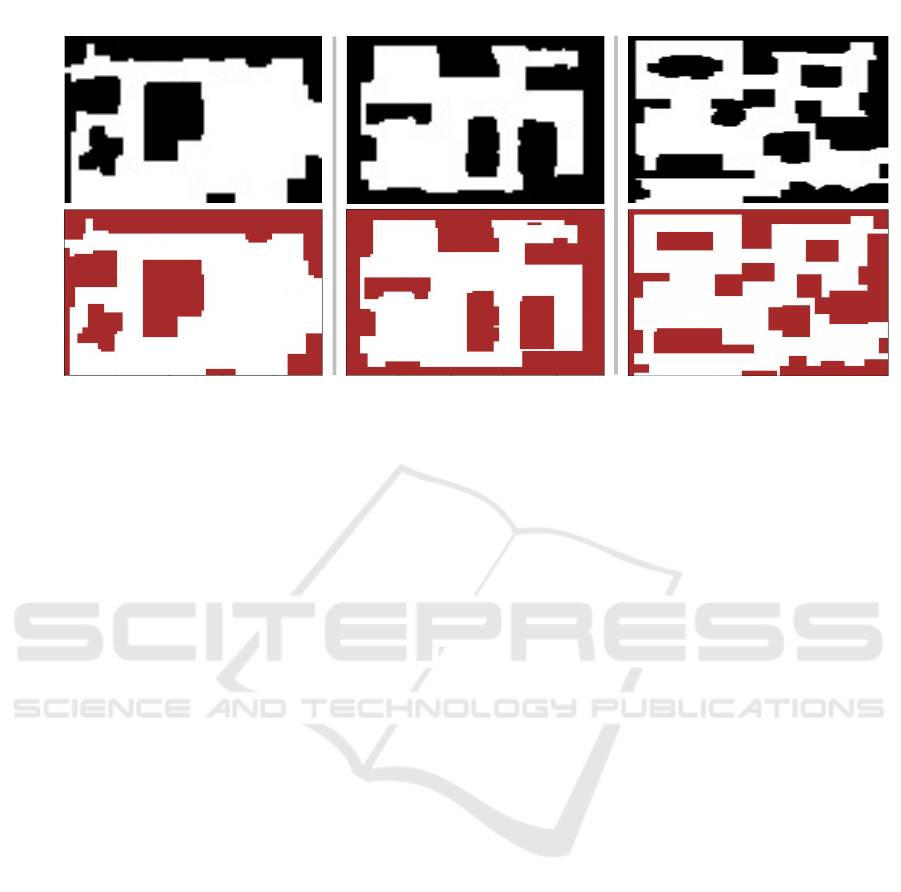
Adairsville (∼5.5 x 10 meters)
Bonesteel (∼ 10 x 9 meters)
Highspire (∼ 6 x 10 meters)
Binary image
Rectangular
decomposition
Figure 2: Examples of floor plans of real environments from the Gibson dataset (Xia et al., 2018). After extracting the
binary images of the navigable areas (first row), each floor plan was decomposed into a set of rectangles (second row). This
representation simplifies the process of importing floor plans into the proposed simulator. The floor plans have been scaled
for visualization purposes, their actual size is indicated in the text above each image.
2021), which employed unrealistic human dynamics,
this work extends the simulator introduced in (Chen
et al., 2019) to support advanced human simulations
for recreating complex navigation environments. The
simulator allows dynamic environment generation or
the import of real floor plans and incorporates a lidar
sensor for obstacle perception. Similar to the “person
sensor”, the signal from the lidar is less affected by
the potential domain gap between the simulated and
real world. Navigation models trained under these
conditions are better equipped to operate in realistic
settings, facilitating the learning of robust and sophis-
ticated navigation policies.
3 TRAIN NAVIGATION MODELS
IN COMPLEX
ENVIRONMENTS
In this section, we provide a detailed discussion on
the proposed simulator designed for training naviga-
tion policies in environments that include both static
components (such as the environment’s layout) and
dynamic components (such as moving humans). We
will release the code of the proposed simulator, along
with the dataset of 2D floor plans from real-world en-
vironments.
3.1 The CrowdSim++ Simulator
The proposed CrowdSim++ is an enhanced version of
the open-source simulator introduced in (Chen et al.,
2019). This simulator represents the environment on a
2D plane, viewed from a top-down perspective. Fig-
ure 1 displays two examples of navigation episodes
performed within the simulator. Both the robot and
humans are depicted as circles, moving freely on the
2D plane and guided toward their destinations by
the respective navigation policies. The simulator na-
tively implements the Gym library, enabling the use
of numerous Gym-compliant policy optimization al-
gorithms available in the state of the art. The layouts
of the environments used in simulation were recre-
ated using rectangles of varying dimensions. When
combined, these rectangles form more complex ge-
ometries. Examples of the generated environments
are depicted in Figure 2. The proposed system allows
for the creation of two distinct types of scenarios:
1) randomly generated environments with a variable
number of obstacles; 2) environments recreated based
on the floor plans of real locations. The construction
methods for these scenarios are described below.
Randomly Generated Environments. This strat-
egy offers a practical solution for constructing syn-
thetic environments with varying geometry and com-
plexity, crucial for training robust navigation poli-
cies capable of generalizing to novel environments.
Example of such environments are showed in Fig-
ure 1. The selection of obstacle count and size al-
lows for tailoring the complexity level encountered by
the navigation model during both training and test-
ing phases. During environment generation, obsta-
cles are strategically placed to maintain a margin from
the environment boundaries and each other. This ap-
proach ensures that invalid configurations, such as
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
536

edge-concentrated (simple layout) or obstructed en-
vironments lacking sufficient navigation space (parti-
tioned environment), are avoided. This study explores
various types of randomly generated environments,
progressively increasing in complexity.
Real Environments. The use of floor plans de-
rived from real environments holds significant impor-
tance as it allows navigation models to learn poli-
cies directly from observations of complex geome-
tries resembling potential deployment environments
for robots. Realistic floor plans also prove beneficial
in scenarios requiring specialized navigation models
tailored to specific environments or when early per-
formance estimates are necessary before real-world
testing. Figure 2 displays examples of the floor plans,
represented as binary images, along with their respec-
tive decomposition into rectangles. In this study, we
focused on the 3D indoor environments from the Gib-
son dataset (Xia et al., 2018), comprising 572 real
buildings reconstructed using advanced 3D scanning
techniques. Given that our simulator supports 2D
floor plans, a preprocessing step was required to adapt
these environments. To achieve this, we imported the
3D models into the Habitat simulator (Savva et al.,
2019) and developed a custom script to extract the
navigation meshes (navmeshes), i.e. polygon meshes
defining navigable areas for agents. Optimal results
were achieved by setting the virtual agent dimensions
to a height of 0.1 meters and a diameter of 0.2 meters.
For multi-level buildings, only ground floor rooms
were included. Navmesh data was subsequently con-
verted into binary images to differentiate navigable
areas (white) from obstacles (black), with each pixel
representing 0.1 square meters. To enhance navigabil-
ity while preserving geometry, morphological opera-
tors were applied, notably two iterations of the clos-
ing operation, yielding satisfactory results. Finally, to
import the floor plan into the simulator, we employed
a rectangular decomposition algorithm
1
. This trans-
formed non-navigable areas of the 2D binary image
into a set of variable-sized rectangles. The algorithm
minimizes the number of rectangles while maximiz-
ing coverage of the specific area. Following gener-
ation, the rectangles were sorted based on area size
(from largest to smallest). We then set a threshold of
30 as the maximum number of rectangles per floor
plan for use during navigation simulations. In our
study, we adopted the “medium” data split of the Gib-
son dataset as proposed in (Xia et al., 2018), which
contains a subset of environments of enhanced qual-
ity. Throughout the transformation process of these
floor plans, some were excluded due to lack of navi-
1
We used the Adaptive-Boxes decomposition algorithm
https://github.com/jnfran92/adaptive-boxes
(𝑝
!
, 𝑝
"
, 𝑣
!
, 𝑣
"
, 𝑟)
2D lidar sensor (45 beams, 5m, 180d) and “person sensor”
Figure 3: Visualization of the sensors used by the robot.
The purple segments originating from the robot (yellow cir-
cle) represent the laser beams of the lidar sensor. The red
dots on the obstacles indicate the distances perceived by
each laser beam. In green, the ”person sensor” is high-
lighted, which provides information on the position, speed,
and space occupied by the humans.
gability or disconnected areas. The resulting dataset
is a curated collection comprising 120 distinct envi-
ronments.
Robot’s Perception. Effective navigation for a robot
relies on having the appropriate sensors to perceive
its environment accurately. In this regard, we ex-
tended the CrowdSim simulator (Chen et al., 2019)
to support a 2D lidar sensor, which allows the robot
to get detailed and real-time information about obsta-
cles, walls, and other structural elements of the envi-
ronment. Figure 3 provides a graphical representation
of the lidar sensor. Specifically, it measures the dis-
tance to objects by calculating the time it takes for
the laser pulses to reflect back from surfaces. The
implemented sensor can be customized by adjusting
parameters such as the number of laser beams, maxi-
mum perceived distance, and field of view (up to 360
degrees). An obstacle, whether static or dynamic, is
detected by a laser beam if there is an intersection
between the beam and the obstacle. In such cases,
the measured distance is that of the closest intersec-
tion point to the robot. We employed the Shapely
2
library for efficient management of geometric inter-
sections. Additionally, we implemented a strategy to
enhance measurement efficiency by excluding obsta-
cles beyond the sensor’s maximum range.
2
We used the Shapely library https://github.com/
shapely/shapely
CrowdSim++: Unifying Crowd Navigation and Obstacle Avoidance
537

4 EXPERIMENTAL SETTINGS
AND RESULTS
In this section, we discuss the characteristics of the
environments used for training navigation policies,
the considered navigation models, and the details of
the training and evaluation setup.
4.1 Environments and Simulation
To test our hypothesis that training navigation policies
in complex, crowded environments leads to superior
performance, we designed a series of navigation envi-
ronments with varying levels of difficulty.
Generated Environments. For randomly generated
environments, we trained and tested the navigation
models in scenarios with one and three obstacles. We
set each environment to a fixed size of 10 ×10 meters.
Within this space, we generated rectangular obstacles
with variable dimensions, with side lengths randomly
chosen in the range [3,6] meters. In all cases, we
added four additional obstacles along the edges of the
environment. This served two purposes: 1) prevent-
ing agents from navigating outside the environment
without triggering a collision event; 2) enabling the
lidar sensor to accurately detect the boundaries of the
navigable space. Subsequently, To ensure challenging
navigation tasks, we placed agents’ starting positions
and goals at least 7 meters apart (70% of the envi-
ronment’s longest side). To enhance simulation effi-
ciency, we pre-computed obstacle layouts and agent
start/goal positions, loading them as needed instead
of generating them in real-time.
For each scenario, we created 100 unique environ-
ments for both the training and test sets. Each en-
vironment supports thousands of possible navigation
episodes. This setup allows the navigation model to
learn from a diverse range of similarly complex envi-
ronments, enhancing its ability to generalize to new
settings. The number of episodes per environment is
dynamically calculated at the start of each training or
testing session, based on the total number of naviga-
tion episodes.
Real Environments. Real floor plans provide an op-
portunity to develop navigation policies for highly
complex environments. In our setup, we focused on
training specialized models for navigation in specific
environments where floor plans are available in ad-
vance. This scenario is common in practice, as robots
often need in-depth knowledge of environmental lay-
outs to operate with high accuracy. Moreover, this ap-
proach aligns with classic navigation systems that re-
quire access to environmental maps (Durrant-Whyte
and Bailey, 2006). Specifically, we selected three real
environments from our proposed set of floor plans,
representing easy, medium, and hard scenarios with
increasing levels of difficulty. Figure 2 illustrates
these floor plans. For each environment, we sam-
pled two disjoint sets of trajectories: one for training
and one for testing. As with the random obstacle sce-
narios, we pre-computed these trajectories to enhance
simulation efficiency.
Simulation Details. Our simulations feature environ-
ments with varying numbers of human agents dur-
ing the training phase. For evaluation purposes, we
consistently use scenes containing five human agents.
All agents, including the robot, are represented as
circular entities with a radius of 0.3 meters. Hu-
mans are guided by the ORCA policy (Van den Berg
et al., 2008). We assume that the robot has holo-
nomic kinematics and that it is invisible to humans.
Navigation is formulated as a point-goal navigation
task (M
¨
oller et al., 2021). At each step, the robot re-
ceives a new observation from the environment, up-
dates the information on the goal to be reached and
chooses one of 16 discrete actions. The observation
includes the robot’s self state w
t
and, depending on
the type of input considered (as we will see in Sec-
tion 4.2), the lidar observation l
t
, the states of humans
u
t
= [u
t
1
,u
t
2
,..., u
t
n
] assuming a total number of n hu-
mans, or both of them. All data are expressed in the
local reference frame of the robot. The robot state w
t
consists of the robot’s distance to goal d
g
, preferred
speed v
pre f
, velocity (v
x
,v
y
), radius r. Each human
state u
t
i
consists of the human’s position
p
i
x
, p
i
y
, ve-
locity
v
i
x
,v
i
y
and radius r
i
. The lidar observation l
t
consists of n
l
range measurements indicating the dis-
tance to the closest obstacle from each beam’s direc-
tion. The action space consists of 2 linear velocities
exponentially spaced between (0, v
pre f
]m/s and 8 di-
rections evenly spaced between [0,2π) degrees. The
navigation episode ends if the robot reaches the goal
within a radius of 0.2 meters, when a collision occurs
or when the maximum simulation time is reached.
Each step is equivalent to an execution time of 0.25s
and the maximum simulation time for an episode is
25s.
4.2 Navigation Models
In our study, we considered two popular Reinforce-
ment Learning-based models for crowd navigation:
CADRL (Chen et al., 2017) and SARL (Chen et al.,
2019). In their original formulation, both models rely
on direct input from a “person sensor” that provides
information on the position, velocity, and physical di-
mensions of nearby humans. SARL represents an
improvement over CADRL as it adopts a more ad-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
538

vanced input data aggregation system based on a self-
attention system, to better capture the robot’s interac-
tions with the most relevant humans. In this work, we
modified the CADRL and SARL models to process
2D lidar signals, allowing us to evaluate their per-
formance in complex, crowded environments under
various sensor configurations. We conducted exper-
iments to assess the navigation models’ capabilities
when equipped with: 1) “person sensor” only; 2) lidar
sensor only; 3) a combination of “person sensor” and
lidar sensor. From now on, we will refer to these nav-
igation models as CADRL++ and SARL++, respec-
tively. For the lidar configuration, we optimized sen-
sor parameters to balance environmental perception
and simulation efficiency. We set the Field of View
(FOV) to 180 degrees, covering the robot’s frontal
semicircle. The lidar uses 45 laser beams and has a
maximum perceptible distance of 5 meters.
4.3 Training and Evaluation Setup
Following the setup in (Chen et al., 2019), the nav-
igation policies were bootstrapped from the demon-
strations provided by ORCA (Van den Berg et al.,
2008) using imitation learning, for a total of 3k navi-
gation episodes. Subsequently, they were trained us-
ing Reinforcement Learning for 10k episodes, using
the ε−greedy exploration strategy, with ε decaying
linearly from 0.9 to 0.5 over the first 5k navigation
episodes. The discount factor γ and the learning rate
were set to 0.9 and 0.001, respectively. We found the
reward function defined in (Chen et al., 2019) suit-
able to award task accomplishments while penaliz-
ing collisions or uncomfortable distances. The pol-
icy is trained by the temporal-difference method with
standard experience replay and fixed target network
techniques (Chen et al., 2019; Chen et al., 2017).
Please refer to Section 1 of the supplementary mate-
rial for a more detailed formulation of the Reinforce-
ment Learning framework adopted.
In our evaluation process, we assessed naviga-
tion performance across 500 trajectories for each nav-
igation scenario. These trajectories were sampled
from test environments obtained as indicated in Sec-
tion 4.1. Specifically, for the randomly generated
environments, we conducted tests under two distinct
scenarios. The first scenario involved environments
containing a single obstacle, while the second one fea-
tured environments with three obstacles. In contrast,
our evaluation of real floor plans utilized the same en-
vironmental layout, but we employed a separate set
of navigation trajectories. All scenarios included five
human agents.
Our evaluation employed several key metrics to
provide a comprehensive evaluation of the naviga-
tion system’s performance, safety, efficiency, and so-
cial awareness: 1) success rate quantifies the aver-
age proportion of episodes completed without colli-
sions. It provides insight into the overall effectiveness
of the navigation system in safely reaching its destina-
tion; 2) collision rate measures the average fraction of
episodes that concluded with the robot colliding with
either humans or obstacles. This metric helps iden-
tify the frequency of navigation failures due to phys-
ical interactions; 3) timeout rate represents the aver-
age proportion of episodes that reached the maximum
simulation time without completion. It indicates sce-
narios where the robot was unable to reach its goal
within the specified time constraints; 4) navigation
time calculates the average time taken by successful
episodes to reach the goal. This metric allows for a
more precise evaluation of the policy’s performance
when it operates as intended; 5) danger frequency cal-
culates the average fraction of navigation steps during
which the robot came within 0.2 meters (referred to as
the discomfort distance) of a human. This metric as-
sesses the robot’s ability to maintain comfortable dis-
tances from humans during navigation.
5 EXPERIMENTS
In the following experiments, we aim to demonstrate
that existing navigation models can benefit from train-
ing in environments with both complex layouts and
moving humans, particularly when configured to re-
ceive input signals from additional sensors.
Results for Generated Environments. Table 1
presents the results of navigation models tested in en-
vironments featuring one obstacle and five humans.
Each line indicates the type of navigation model,
the used sensors (consistent across both the train-
ing and testing phases), the number of obstacles, and
whether humans were present during training (we
fixed the number of humans to five). As expected,
the CADRL++ navigation model shows limited per-
formance when trained in obstacle-free environments
(lines 1-3). For the model equipped only with a “per-
son sensor”, the information on human behavior was
insufficient to infer the presence of obstacles, which
remain invisible. The model using only the lidar sen-
sor (line 2) was able to perceive static obstacles and
reduce the collision rate compared to the model us-
ing only the “person sensor” (line 2 vs. 1, 0.3240 vs.
0.4788 collision rate). However, it failed to accurately
detect and avoid humans, as indicated by the higher
recorded danger frequency. Moreover, its success rate
CrowdSim++: Unifying Crowd Navigation and Obstacle Avoidance
539

Table 1: Performance of the considered navigation models, tested in environments with one obstacle and five humans. The
policies were trained in scenarios with a variable number of obstacles (ranging from 0 to 3), with or without humans, and
using the “person sensor,” the lidar sensor, or both. The results confirm that training in crowded environments with a greater
number of obstacles leads to better outcomes. Additionally, using both sensors is essential for optimal performance.
Test environments: 1 obstacle, 5 humans
model sensor(s)
# of
obstacles humans
success
rate (↑)
collision
rate (↓)
timeout
rate (↓)
nav.
time (↓)
danger
freq. (↓)
1 CADRL person 0 ✓ 0.4550 0.4788 0.0662 10.2282 0.0766
2 CADRL++ lidar 0 ✓ 0.2560 0.3240 0.4200 17.5719 0.1232
3 CADRL++ lidar+person 0 ✓ 0.4932 0.2500 0.2568 13.5847 0.0946
4 CADRL++ lidar 1 ✗ 0.4824 0.1480 0.3696 16.1093 0.0871
5 CADRL++ lidar 3 ✗ 0.5644 0.1900 0.2456 12.3953 0.1664
6 CADRL++ person 1 ✓ 0.3124 0.4800 0.2076 12.8515 0.0670
7 CADRL++ person 3 ✓ 0.0120 0.1720 0.8160 25.0000 0.0471
8 CADRL++ lidar 1 ✓ 0.5134 0.2176 0.2690 16.0571 0.1104
9 CADRL++ lidar 3 ✓ 0.6027 0.3024 0.0949 12.6989 0.1708
10 CADRL++ lidar+person 1 ✓ 0.6741 0.1960 0.1299 12.9387 0.0896
11 CADRL++ lidar+person 3 ✓ 0.7172 0.1510 0.1318 11.2958 0.1659
12 SARL person 0 ✓ 0.4727 0.4312 0.0961 9.7005 0.0183
13 SARL++ lidar+person 0 ✓ 0.5688 0.2880 0.1432 10.9796 0.0150
14 SARL++ person 1 ✓ 0.3514 0.3390 0.3096 12.2493 0.0252
15 SARL++ person 3 ✓ 0.0520 0.0900 0.8580 21.8550 0.0624
16 SARL++ lidar+person 1 ✓ 0.6934 0.2295 0.0771 10.9218 0.0272
17 SARL++ lidar+person 3 ✓ 0.7498 0.1560 0.0942 11.5688 0.0651
remains limited because it was not exposed to envi-
ronments with obstacles during training. Adding a
“person sensor” to the existing lidar sensor signifi-
cantly improved navigation performance (line 3). By
explicitly detecting the position and speed of humans,
the model was able to reduce both the collision rate
and the frequency of invading human comfort zones.
Training the models equipped with a lidar sensor in
environments with obstacles but without humans (line
4-5) further reduced the collision rate, even if humans
are not seen during training, suggesting that the li-
dar can compensate for the lack of a dedicated “per-
son sensor”. Using a more complex environment with
three obstacles led to a higher success rate (line 5).
For navigation models trained in the presence of
humans and with a variable number of obstacles (lines
6-11), we observe that more complex environments
are beneficial when the robot uses appropriate sen-
sors. Specifically, when only the “person sensor” is
used, performance is very limited (line 7, CADRL++
with three obstacles). However, when the lidar sen-
sor is used (lines 8-9), performance improves drasti-
cally. In the scenario with three obstacles, the navi-
gation model learned to navigate the complex geome-
tries, although it showed some difficulty in managing
human dynamics, as indicated by a higher danger fre-
quency. The best-performing CADRL++ navigation
models are those equipped with both “person” and li-
dar sensors (lines 10-11). Among these, the model
trained in more complex environments achieved the
highest success rate (0.7172). The SARL++ naviga-
tion model confirmed its superior ability in capturing
human-robot relationships.
When analyzing the performance of SARL++
(lines 12-17), it consistently outperformed
CADRL++ across all training scenarios. It achieved
the best success rate (0.7498) in the scenario where
both the “person sensor” and lidar sensor were used,
and the training took place in environments with
three obstacles and the presence of humans.
Navigation models tested in environments with
three obstacles and five humans achieved perfor-
mances that mirror the trends observed in Table 1 but
they are generally inferior. Please refer to Section 2
of the supplementary material for a more detailed dis-
cussion.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
540

Navigation episodes in real-world floor plans
“Easy” environment
“Medium” environment
“Hard” environment
Humans
trajectories
Human
Robot
without lidar
Robots
trajectories
Robot
with lidar
Obstacle
Humans
trajectories
Human
Robot
without lidar
Robots
trajectories
Robot
with lidar
Obstacle
Figure 4: Examples of navigation episodes in real floor plans using the SARL++ model in the easy, medium, and hard
scenarios. The robot equipped with both “person” and lidar sensors (blue circle, red trajectory) successfully navigates through
narrow and crowded areas. In contrast, using the same navigation model without the lidar sensor, the robot collides with
the first obstacle encountered (yellow circle, gray trajectory). The figure represents snapshots of the concluded navigation
episodes.
Overall, the results confirm that navigation models
can learn advanced navigation policies when trained
in complex environments. Training in crowded en-
vironments with a greater number of obstacles leads
to better results and more robust models. Addition-
ally, the use of specialized sensors is advantageous
for capturing the distinct properties of static and dy-
namic obstacles.
Results for Real Environments. Table 2 reports the
results obtained by SARL++ with both “person sen-
sor” and lidar sensor, trained and tested on three real
floor plans classified as easy, medium, and hard. The
floor plans are showed in Figure 4. This navigation
model achieved the best results in the previous eval-
uations. In the easy scenario, SARL++ performed
well, with almost no navigation episodes ending in
timeout, indicating that a robust navigation policy had
been learned, capable of guiding the robot to its desti-
nation efficiently. However, the success rate dropped
in the medium and hard scenarios, with the hard sce-
nario showing the highest timeout rate. Similar to the
test conducted in environments with three obstacles,
this performance decline may be due to the use of a
less efficient RL algorithm, which requires a signif-
icantly higher number of training episodes to handle
more challenging environments effectively.
Nonetheless, the average results confirm that navi-
gation policies benefit from exposure to complex real
floor plans and that training specialized models for
specific floor plans is an effective strategy.
Table 2: Navigation performance in real-world floor plans.
The evaluation focused on the SARL++ model, equipped
with both a person sensor and lidar sensor. Refer to the text
for details.
model sensor(s)
real floor
plan
humans
success
rate
collision
rate
timeout
rate
SARL++ lidar+person easy ✓ 0.8436 0.1433 0.0131
SARL++ lidar+person medium ✓ 0.7678 0.1842 0.0480
SARL++ lidar+person hard ✓ 0.6610 0.1079 0.2311
avg. 0.7575 0.1451 0.0974
6 CONCLUSION
In this study, we introduced CrowdSim++, an ad-
vanced simulator designed to train navigation mod-
els under realistic conditions. Through experimenta-
tion and comparative analysis, we confirmed the im-
portance of training in complex scenarios involving
humans to develop robust navigation policies suitable
for real-world deployment. We anticipate that our
proposed simulator and dataset of realistic floor plans
will catalyze further advancements in autonomous
navigation systems.
ACKNOWLEDGEMENTS
This research has been supported by the project Fu-
ture Artificial Intelligence Research (FAIR) – PNRR
MUR Cod. PE0000013 - CUP: E63C22001940006
CrowdSim++: Unifying Crowd Navigation and Obstacle Avoidance
541

REFERENCES
Bojarski, M., Del Testa, D., Dworakowski, D., Firner,
B., Flepp, B., Goyal, P., Jackel, L. D., Monfort,
M., Muller, U., Zhang, J., et al. (2016). End to
end learning for self-driving cars. arXiv preprint
arXiv:1604.07316.
Cancelli, E., Campari, T., Serafini, L., Chang, A. X., and
Ballan, L. (2023). Exploiting proximity-aware tasks
for embodied social navigation. In International Con-
ference on Computer Vision (ICCV). IEEE.
Chen, B., Sax, A., Lewis, F., Armeni, I., Savarese, S.,
Zamir, A., Malik, J., and Pinto, L. (2021). Robust
policies via mid-level visual representations: An ex-
perimental study in manipulation and navigation. In
Kober, J., Ramos, F., and Tomlin, C., editors, Pro-
ceedings of the 2020 Conference on Robot Learning,
volume 155, pages 2328–2346.
Chen, C., Liu, Y., Kreiss, S., and Alahi, A. (2019). Crowd-
robot interaction: Crowd-aware robot navigation with
attention-based deep reinforcement learning. In In-
ternational Conference on Robotics and Automation
(ICRA).
Chen, T. L., Ciocarlie, M., Cousins, S., Grice, P. M.,
Hawkins, K., Hsiao, K., Kemp, C. C., King, C.-H.,
Lazewatsky, D. A., Leeper, A. E., et al. (2013). Robots
for humanity: using assistive robotics to empower
people with disabilities. IEEE Robotics & Automation
Magazine, 20(1).
Chen, Y. F., Liu, M., Everett, M., and How, J. P. (2017). De-
centralized non-communicating multiagent collision
avoidance with deep reinforcement learning. In In-
ternational Conference on Robotics and Automation
(ICRA).
Dong, M. and Zhang, J. (2023). A review of robotic grasp
detection technology. Robotica.
Durrant-Whyte, H. and Bailey, T. (2006). Simultaneous lo-
calization and mapping: part i. IEEE robotics & au-
tomation magazine.
Khanna, M., Mao, Y., Jiang, H., Haresh, S., Shacklett, B.,
Batra, D., Clegg, A., Undersander, E., Chang, A. X.,
and Savva, M. (2024). Habitat synthetic scenes dataset
(hssd-200): An analysis of 3d scene scale and realism
tradeoffs for objectgoal navigation. In Computer Vi-
sion and Pattern Recognition (CVPR).
Kuderer, M., Kretzschmar, H., Sprunk, C., and Burgard, W.
(2012). Feature-based prediction of trajectories for so-
cially compliant navigation. In Robotics: science and
systems, volume 8.
Liu, L., Dugas, D., Cesari, G., Siegwart, R., and Dub
´
e, R.
(2020). Robot navigation in crowded environments
using deep reinforcement learning. In 2020 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS).
Mavrogiannis, C., Baldini, F., Wang, A., Zhao, D., Traut-
man, P., Steinfeld, A., and Oh, J. (2023). Core chal-
lenges of social robot navigation: A survey. ACM
Transactions on Human-Robot Interaction, 12(3).
Miller, D. P. (2006). Assistive robotics: an overview. As-
sistive Technology and Artificial Intelligence: Appli-
cations in Robotics, User Interfaces and Natural Lan-
guage Processing.
M
¨
oller, R., Furnari, A., Battiato, S., H
¨
arm
¨
a, A., and
Farinella, G. M. (2021). A survey on human-aware
robot navigation. Robotics and Autonomous Systems,
145.
Otte, M. W. (2015). A survey of machine learning ap-
proaches to robotic path-planning. University of Col-
orado at Boulder, Boulder.
P
´
erez-D’Arpino, C., Liu, C., Goebel, P., Mart
´
ın-Mart
´
ın, R.,
and Savarese, S. (2021). Robot navigation in con-
strained pedestrian environments using reinforcement
learning. In International Conference on Robotics and
Automation (ICRA).
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A. Y., et al. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3.
Rosano, M., Furnari, A., Gulino, L., and Farinella, G. M.
(2021). On embodied visual navigation in real envi-
ronments through habitat. In International Conference
on Pattern Recognition (ICPR).
Rosano, M., Furnari, A., Gulino, L., Santoro, C., and
Farinella, G. M. (2023). Image-based navigation in
real-world environments via multiple mid-level repre-
sentations: Fusion models, benchmark and efficient
evaluation. Autonomous Robots, 47(8).
Savva, M., Kadian, A., Maksymets, O., Zhao, Y., Wijmans,
E., Jain, B., Straub, J., Liu, J., Koltun, V., Malik, J.,
et al. (2019). Habitat: A platform for embodied ai
research. In International Conference on Computer
Vision (ICCV).
Staranowicz, A. and Mariottini, G. L. (2011). A survey and
comparison of commercial and open-source robotic
simulator software. In Proceedings of the 4th Interna-
tional Conference on PErvasive Technologies Related
to Assistive Environments.
Van den Berg, J., Lin, M., and Manocha, D. (2008). Recip-
rocal velocity obstacles for real-time multi-agent nav-
igation. In International Conference on Robotics and
Automation (ICRA).
Xia, F., Zamir, A. R., He, Z., Sax, A., Malik, J., and
Savarese, S. (2018). Gibson env: Real-world percep-
tion for embodied agents. In Computer Vision and
Pattern Recognition (CVPR).
Yaar, A., Furnari, A., Rosano, M., H
¨
arm
¨
a, A., and Farinella,
G. M. (2024). Finding and navigating to humans in
complex environments for assistive task. In Inter-
national Conference on Computer Vision Theory and
Applications (VISAPP).
Zhu, K. and Zhang, T. (2021). Deep reinforcement learning
based mobile robot navigation: A review. Tsinghua
Science and Technology, 26(5).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
542
