
Single-Exemplar Lighting Style Transfer via
Emissive Texture Synthesis and Optimization
Pierre Ecormier-Nocca
a
, Lukas Lipp
b
, Annalena Ulschmid
c
, David Hahn
d
and Michael Wimmer
e
Institute of Visual Computing and Human-Centered Technology, TU Wien, Vienna, Austria
Keywords:
Lighting Design, Lighting Style Ttransfer, Texture Synthesis, Lighting Optimization.
Abstract:
Lighting is a key component in how scenes are perceived. However, many interior lighting situations are
currently either handcrafted by expert designers, or simply consist of basic regular arrangements of luminaires,
such as to reach uniform lighting at a predefined brightness. Our method aims to bring more interesting
lighting configurations to various scenes in a semi-automatic manner designed for fast prototyping by non-
expert users. Starting from a single photograph of a lighting configuration, we allow users to quickly copy
and adapt a lighting style to any 3D scene. Combining image analysis, texture synthesis, and light parameter
optimization, we produce a lighting design for the target 3D scene matching the input image. We validate via
a user study that our results successfully transfer the desired lighting style more accurately and realistically
than state-of-the-art generic style transfer methods. Furthermore, we investigate the behaviour of our method
under potential alternative choices in an ablation study.
1 INTRODUCTION
Lighting design is often overlooked in the early phase
of architectural planning, or requires expert knowl-
edge for specific design tasks. While common con-
struction projects apply simple, well-known solutions
to achieve regulatory compliance, the available design
space is rarely explored further. Even then, manually
arranging complex lighting setups for interior design
is a laborious task. We instead envision a workflow
that allows non-expert users to create lighting designs
for a target scene using a copy-and-paste metaphor.
In this paper we establish a user-controllable,
semi-automatic pipeline, allowing the user to capture
lighting conditions of a single reference image, and
then transfer them to the target scene. Existing meth-
ods for image-based style transfer, however, are not
sufficient to achieve this goal, as they ignore the geo-
metric structure of the 3D target scene and the physics
of light transport. We, instead, first extract light-
ing information from the exemplar image in a user-
a
https://orcid.org/0000-0002-3975-4913
b
https://orcid.org/0000-0002-1110-0707
c
https://orcid.org/0000-0002-0539-9378
d
https://orcid.org/0000-0002-7617-5523
e
https://orcid.org/0000-0002-9370-2663
guided segmentation step, correct for distortion in the
input using perspective and vanishing point analysis,
and then synthesize an emissive texture for the target
scene. Finally, we optimize the colour cast and inten-
sity of the emissive texture to correct for indirect il-
lumination effects in the target scene using an inverse
rendering approach. In this way, we transfer the light-
ing style while keeping user interactions to a mini-
mum, but still enabling a controllable copy-and-paste
user experience. We show results of our system on
various indoor scenes and style exemplars. In a user
study we demonstrate clear advantages over state-of-
the-art image style transfer methods. Note that our re-
sults are not simply modified images, but physically-
based renderings of the modified 3D scenes taking
global illumination into account. Overall, our ap-
proach, illustrated in Fig. 1, opens the lighting design
space to non-expert users. Our results rely on the fol-
lowing scientific contributions:
• An efficient data-augmented method for semi-
automatic segmentation (§4) and annotation of
photographs,
• an automatic texture unwarping and perspective
correction method for indoor images (§5),
• and an emissive texture synthesis and lighting op-
timization routine (§6).
Ecormier-Nocca, P., Lipp, L., Ulschmid, A., Hahn, D. and Wimmer, M.
Single-Exemplar Lighting Style Transfer via Emissive Texture Synthesis and Optimization.
DOI: 10.5220/0013193900003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 113-126
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
113

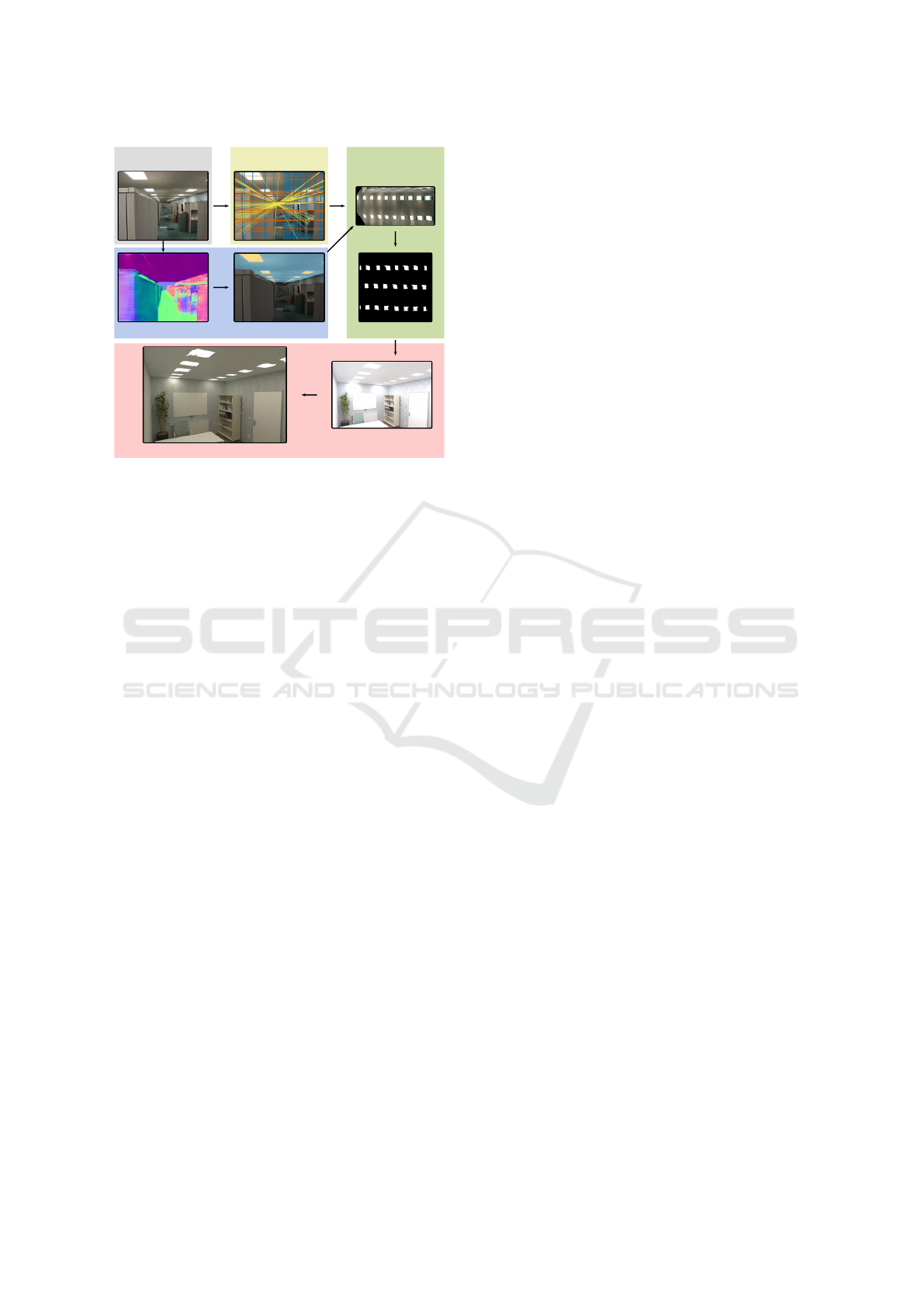
Style Exemplar
Style Transfer
Lighting
Figure 1: We transfer the lighting setup from a single input
image to any 3D scene by extracting a perspective-corrected
light mask via data-guided segmentation. We generate an
emissive texture from the extracted light mask and apply it
to the 3D scene. We then optimize its emissive parameters
to match the colour of the input image.
2 PREVIOUS WORK
Lighting design typically involves manually plac-
ing light fixtures and verifying regulatory compli-
ance with industry-standard software tools (DIAL
GmbH, 2022; Relux Informatik AG, 2022), which
is a time-consuming process. Consequently, simple
arrays of lights are ubiquitous solutions. Computa-
tional lighting design has been explored based on user
hints (Schoeneman et al., 1993; Anrys et al., 2004;
Pellacini et al., 2007; Okabe et al., 2007; Lin et al.,
2013), procedural modeling and optimization (Kawai
et al., 1993; Schwarz and Wonka, 2014; Gkaravelis,
2016; Jin and Lee, 2019), or visualization and sugges-
tive design (Sorger et al., 2016; Walch et al., 2019).
While these methods provide more approachable so-
lutions to lighting design, they still require user exper-
tise to produce the expected results. As we target both
expert and novice users, we formulate our method
around a straightforward pipeline that requires no pre-
vious knowledge of lighting design. Recent methods
also propose data-driven neural scene lighting (Ren
et al., 2023), focusing on automatic generation of
lighting designs based on a sufficiently large training
data set. In contrast, we pursue a user-directed single-
input style transfer approach.
Texture synthesis has been widely explored in
Computer Graphics, producing a large variety of ap-
proaches. Starting from pixel-based methods (Efros
and Leung, 1999; Tong et al., 2002), the field has
evolved to patch-based (Efros and Freeman, 2001;
Kwatra et al., 2003) and optimization-based (Kwa-
tra et al., 2005) methods, and recently to deep neural
networks and generative adversarial networks (Sendik
and Cohen-Or, 2017; Fr
¨
uhst
¨
uck et al., 2019; Zhou
et al., 2018b). These methods usually assume a con-
trolled input, meaning a high quality image of an
undistorted albedo texture, without lighting or noise,
although some can be adapted to different input con-
ditions. We use texture synthesis for lighting configu-
rations, which is an unusual application with specific
challenges. Neural methods in particular would need
to be explicitly trained on textures of lighting setups
to produce coherent results. We therefore opt for more
traditional techniques and adapt them to tackle the
specific challenges of lighting texture synthesis in §6.
A few methods handle texture synthesis from un-
controlled images (Eisenacher et al., 2008; Diamanti
et al., 2015), but they operate on a different set of as-
sumptions, making them unsuitable for lighting de-
sign. For example, they might require manual seg-
mentation of the texture, which in our case could cor-
respond to a large number of small light sources, mak-
ing it unnecessarily tedious for the user. They also
require manually annotating the geometry, which is
time consuming, and operating with pixel-based syn-
thesis is only practical for dense textures.
Neural style transfer copies the artistic style from
one image to another. After its introduction (Gatys
et al., 2015), neural style transfer has seen multiple
improvements over the years, with developments spe-
cific to many different applications (see (Jing et al.,
2018) for an overview). In particular, (Li et al.,
2018) present a method for photorealistic style trans-
fer, which can also transfer lighting from image to im-
age. However, as these approaches only work on im-
ages instead of the actual lighting of a 3D scene, there
is no physical plausibility to the transfer, leading to
unexpected and undesirable results. We instead focus
on predictable and physically based lighting, produc-
ing a 3D scene as output instead of an image.
Lighting optimization has been made possible by
inverse rendering methods, where light source param-
eters can be optimized efficiently via differentiable
rendering (Zhang et al., 2020; Jakob et al., 2022; Lipp
et al., 2024). While these methods are physically ac-
curate, they can be difficult to configure to get the de-
sired results, as the user needs to specify a suitable
target illumination for the scene. Instead, we aim to
bridge the gap between manual lighting design and
fully automated optimization by providing a plausible
first solution of the design, which could then be fur-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
114
Input
Perspective
Analysis
Rendering
Data Extraction Segmentation Synthesis
Texture
Unwarping
Optimization
Figure 2: Overview of the lighting transfer pipeline. Se-
mantic data is extracted from the original input image to
assist the user-guided segmentation process. Simultane-
ously, we analyze the input image’s vanishing points to later
allow for perspective corrections. Both serve as input to
the texture synthesis procedure. Based on the perspective-
corrected light mask, we construct an unwarped emissive
texture, which we apply to a surface in the 3D scene. Lastly,
we optimize the lighting parameters to match the input im-
age following the approach of (Lipp et al., 2024).
ther fine-tuned if needed by more specific optimiza-
tion methods.
3 OVERVIEW
In this paper, we consider the following problem:
given an input image showing visible light sources,
can we modify an arbitrary 3D scene to mimic the
mood and perception of the input example by only
editing the lighting of the scene? As additional con-
straints, we aim to produce physically plausible light-
ing to enable realization of our designs. We also con-
sider non-expert users in formulating our method.
As exactly reproducing the input lighting condi-
tions is typically not possible, we extract important
information on the lighting style from a single input
image. We focus on the actual light sources visible in
the image, delivering information on the size, shape,
colour and arrangement of lights. We then aim to
recreate light sources similar to the input image and
integrate them into the output 3D scenes.
Note that light sources visible in the input are of-
ten distorted by perspective and might be too close or
too spread out for the target scene, so directly copying
this data is not possible. Even if the light sources were
copied to the 3D scene, there is no guarantee that the
resulting lighting will produce a similar effect to the
input image, as light will be affected differently by
various materials throughout the scene.
3.1 Constraints and Context
We design our method for minimal user requirements,
while providing an interactive workflow and allowing
for artistic expression. We choose to operate on single
images of a lighting installation, allowing users to se-
lect virtually any available image, possibly captured
with low-quality devices. As a result, our method is
built to be robust against reasonable amounts of noise
and low resolutions, and does not rely on any addi-
tional data sources or training data. We ask the user to
provide system-assisted annotations in the reference
image, which both gives more freedom to the user and
more accurately delivers the expected result.
We operate on a set of assumptions specific to the
use case of interior lighting design, allowing us to in-
ject information into our model and as a result keep
the input requirements as low as possible. First, we
expect the input images to be of building interiors,
which implies closed spaces and controlled lighting.
Second, we only work with planar surfaces, as they
constitute the majority of interiors. Finally, we also
expect low-distortion rectilinear images, thus exclud-
ing fisheye lenses or similarly distorted perspectives.
3.2 Pipeline
As illustrated in Fig. 2, we start by extracting seman-
tic data from a single RGB image, including depth,
3D positions and normals. This information is ag-
gregated as high-dimensional vectors per pixel and
employed to assist the user in providing a meaning-
ful segmentation of the image. We then ask the user
to delimit the plane containing the lighting fixtures
of interest, and to delineate (a subset of) lights that
should be transferred. We then estimate the perspec-
tive transform using image processing techniques and
optimization of the vanishing points in Hough space,
resulting in the coordinates of the image’s vanishing
points in all three dimensions (even if some vanishing
points lie at infinity). We use this data to correct the
perspective of the selected lighting setup.
Applying this perspective correction to the user-
selected lighting configuration produces an “un-
warped” lighting image, which we use as input for
texture synthesis. In this way, we generate arbitrarily
large replica of the image’s lighting features, which
we apply to the target 3D scene as an emissive texture
on a user-selected surface. Finally, we optimize the
intensity and colour of the emissive texture using a
Single-Exemplar Lighting Style Transfer via Emissive Texture Synthesis and Optimization
115

(a) Original image (b) CIELAB lightness (c) CIELAB colour (d) Depth
(e) X coord. (world-space) (f) Y coord. (world-space) (g) Z coord. (world-space) (h) Normals
Figure 3: Extracted information from the input image used to guide the segmentation. These additional data channels provide
semantic information to the system, allowing a finer segmentation of the input. From the original image (a), we convert to
CIELAB colour space (b,c) and estimate depth (d) using MiDaS (Ranftl et al., 2022). The depth is then used to estimate
world-space coordinates (e, f, g) and normals (h). See also Fig. 6 on how this data affects segmentation behaviour.
view-independent inverse rendering framework (Lipp
et al., 2024), such that the light reflected back from
the 3D scene onto the textured surface matches the
ambient colour of the original input image.
4 DATA-GUIDED FEATURE
SELECTION
In this section, we discuss our analysis of the input
image, before moving on to perspective correction,
and lighting optimization.
4.1 Data Extraction
Given an input image, we first extract contextual and
semantic information for each pixel, which we then
use for data-guided segmentation. All the aggregated
data is represented in Fig. 3. First, we estimate the im-
age depth using the deep neural network MiDaS (Ran-
ftl et al., 2022), designed for robust monocular depth
estimation. As we use depth only to provide addi-
tional information for segmentation, we do not re-
quire highly accurate results. Similarly, one could
capture a 2.5D input image using a RGB-D camera.
Next, we estimate 3D coordinates based on the es-
timated depth per pixel by inverting a standard pro-
jection matrix. We use the common projection matrix
P(t,b,l,r, f , n) of a frustum with bounds t, b,l,r at the
top, bottom, left, and right, as well as far and near
plane distances f and n. As we are only looking for a
rough estimate for the 3D coordinates, we choose val-
ues of (−1; 1) for the left-right and bottom-top pairs,
and (1; 10) for the near and far planes. Note that we
do not require the precise values for the input im-
age, as the projection is normalization invariant. The
world-space coordinates p
w
= (x
w
,y
w
,z
w
,w
w
) of each
pixel then follow from the screen-space 2.5D location
and depth of the pixel p
s
= (x
s
,y
s
,d
s
,w
s
) as:
p
w
= P
−1
p
s
. (1)
Furthermore, we use Open3D (Zhou et al., 2018a)
to estimate normals from nearest neighbours within
the resulting world-space point cloud. Once again,
obtaining ground truth normals is not necessary,
as long as the normals are consistent and accurate
enough to infer semantic meaning. Finally, we con-
vert the RGB data to the CIELAB colour space, pro-
ducing one channel for lightness and two channels for
perceptually uniform colour data. While the guided
segmentation procedure could operate in RGB or
other colour spaces, we utilize CIELAB to more ac-
curately represent user intent, which is usually based
on brightness or colour similarity.
4.2 Guided Segmentation
Our pipeline provides the user with a semi-automatic,
data-guided image-segmentation interface. In this in-
terface, they can paint on parts of the image to sep-
arate regions corresponding to the objects of inter-
est from the background. Usually, only a few clicks
are necessary to produce an accurate segmentation of
the image. The segmentation process consists of two
phases: in the first step, the user delineates a plane
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
116
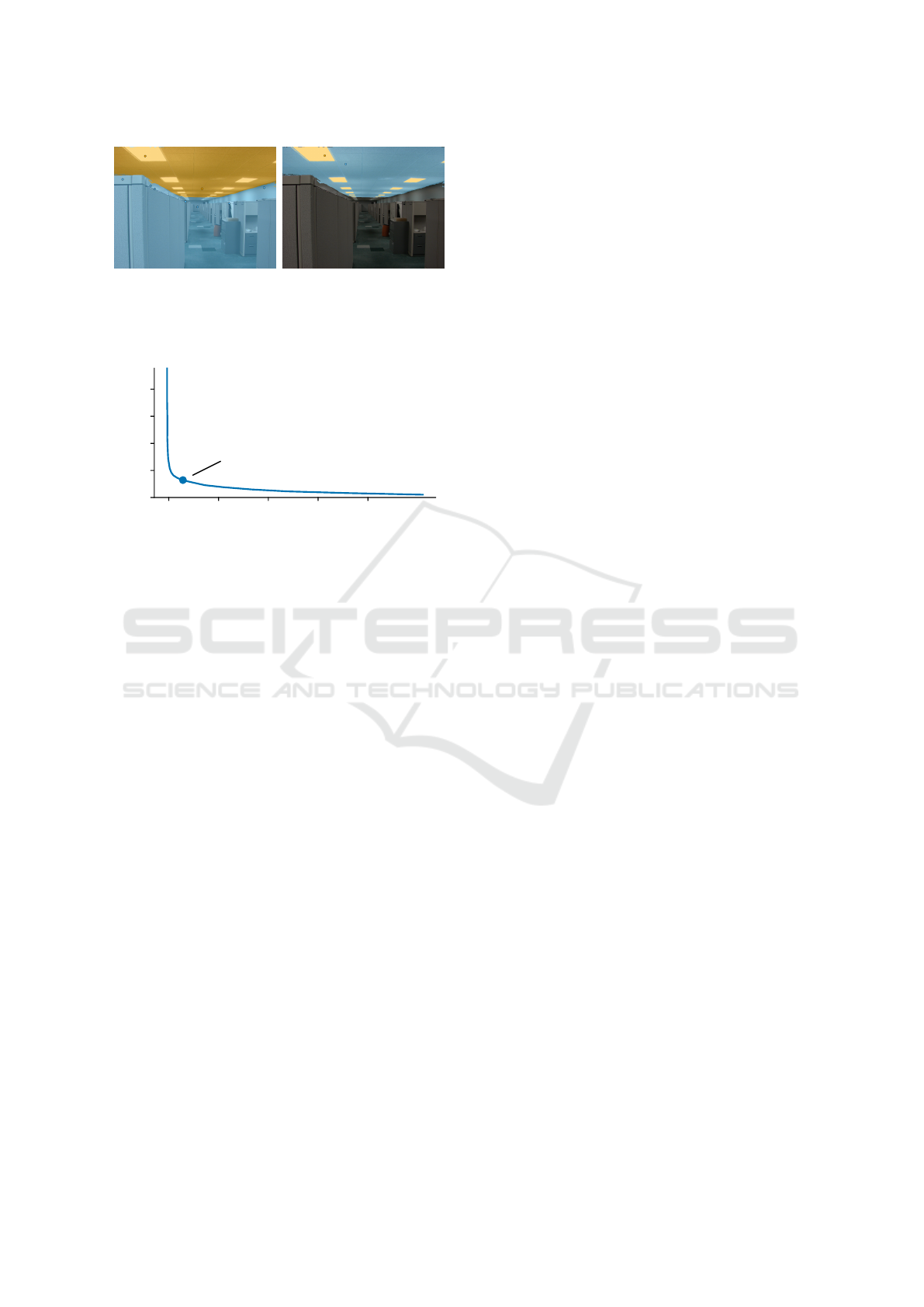
Figure 4: Two-step guided segmentation: First, the plane on
which the lights lie is identified (left). Then, the individual
lights within the plane are selected (right). Orange indicates
selected regions (positive), while blue represents culled re-
gions (negative).
0.2 0.6 1.0
Time [s]
Error
0%
4%
8%
1000 samples/class
err = 1.3%
time = 0.257s
Figure 5: Evolution of the computation time and segmenta-
tion error as the number of samples per class increases from
5 to 25k.
containing the lighting setup (Fig. 4, left), and in the
second step selects the actual lights within this plane
(Fig. 4, right).
We segment the image by interpreting the user’s
annotations as positive and negative examples of a bi-
nary classifier. To reduce training time, while keep-
ing a statistically similar pixel distribution, we ran-
domly sample up to a thousand pixels per class. In
this way, we achieve interactive frame rates during
the selection process. Figure 5 shows the evolution of
the segmentation error and computation time based on
the number of samples used for each class. We mea-
sure the segmentation error as intersection over union
(IoU) compared to the reference using all available
samples. The computation time includes both training
and inference over the whole image, and the number
of samples per class increases from 5 to 25k, which is
slightly less than the total available. The figure shows
that choosing 1000 samples per class results in an er-
ror of around 1.3% in this case, and keeps the total
runtime around 250 ms regardless of the number of
user annotations. We use the same number of samples
in all our results, as it provides a good speed vs. accu-
racy trade-off in general.
For each of the selected samples, we use the previ-
ously extracted data to compute the likelihood of that
pixel being selected or not. Utilizing the extracted
data is one of the central aspects of our method, al-
lowing semantic, and thus faster and more intuitive
segmentation of the input image. For example, se-
lecting the ceiling of a room is implicitly captured by
the model as selecting pixels where the normal points
down and can be differentiated from other down-
facing surfaces based on the y coordinate. In Fig. 6
we show an ablation study, where we use the same
set of inputs to segment the image with different sub-
sets of the extracted data. While using only a subset
results in undesired behaviour, with the full extracted
data available, the ceiling is successfully segmented.
5 PERSPECTIVE CORRECTION
Although the quality of the depth estimation we have
employed earlier is sufficient to gain some 3D infor-
mation for classification purposes, it is far from ac-
curate enough to model the perspective visible in the
image. In order to produce an undistorted emissive
texture, we now focus on improving the perspective
correction with an automated method based on the
Hough transform and vanishing point estimation. Our
approach achieves highly accurate perspective cor-
rection, which prevents propagating projection errors
and artifacts into later stages of the pipeline.
Vanishing point estimation has been studied
in Computer Vision since the beginning of the
field (Magee and Aggarwal, 1984) and improved ever
since. More recent methods use the Hough trans-
form (Chen et al., 2010; Wu et al., 2021) or neural net-
works (Liu et al., 2021). Here, we describe an alter-
native formulation based on RANSAC and the Hough
transform, and in particular, a specially tailored met-
ric necessary for our vanishing point optimization.
5.1 Hough Transform for Line
Detection
The Hough transform (Duda and Hart, 1972) is a
well established method for line detection. Every line
can be uniquely represented by the polar coordinates
(ρ,θ) of the point on the line closest to the origin.
After running the standard Canny edge detection al-
gorithm (Canny, 1986) on the input image, every pos-
sible line passing through each detected edge point
is saved to an accumulator in its polar representation.
The local maxima of this accumulator correspond to
the most prominent lines in the image. However, the
main drawback of this approach is that all aligned
points sitting on an edge will be registered as a line,
which in the case of noise will produce many false
positives. To alleviate this issue, we instead compute
the image-space gradients G
x
and G
y
, and the gra-
dient direction θ
g
= arctan 2(G
y
,G
x
). We then only
register lines within a few degrees of θ
g
(in our case
Single-Exemplar Lighting Style Transfer via Emissive Texture Synthesis and Optimization
117

(a) LAB (b) LAB + D (c) LAB + D + XYZ (d) LAB + D + XYZ + N
Figure 6: Ablation study for segmentation of the input image: extracting the ceiling given the same user inputs, guided by
different subsets of the available data. Using only colour (a), or colour and depth (b) focuses too much on the bright areas
and fails to select a coherent surface; adding spatial coordinates (c) and also estimated normals (d) substantially improves the
segmentation. In this way, we achieve an intuitive interaction with very sparse user inputs.
(a)
-500 0
ρ
500 1000
0
1
2
θ
X dim.
Y dim.
Z dim.
Outlier
(b) (c)
Figure 7: Vanishing point optimization: Lines are extracted from the input image using a gradient-restricted Hough transform
and displayed colour-coded per dimension (a). The points in Hough space corresponding to these image-space lines are
successively classified, whereby the fitted lines correspond to the three vanishing points (b). The image edges are then
coloured by the closest corresponding dimension (c).
±2.5
◦
) to the accumulator. This significantly helps
to reduce false positives and improves computation
speed. The resulting Hough space after maxima ex-
traction is shown in Fig. 7b.
5.2 Finding Vanishing Points
As explained in the previous section, lines in image-
space are represented with polar coordinates as points
in Hough space. Conversely, image-space points can
be represented in Hough space as the curve of all
image-space lines passing through the point. As a re-
sult, it is possible to find the main vanishing points,
defining the perspective of an input image, by find-
ing valid curves in Hough space corresponding to the
intersection of many image-space lines.
Due to noise in the reference image, as well as un-
certainty in the line detection process, the extracted
lines do not uniquely define a vanishing point. There-
fore, an optimization procedure is required to find the
most likely location of each vanishing point. In most
images at least one, often multiple, of the vanishing
points lie outside the image boundaries, often near in-
finity. To allow the optimization process to find van-
ishing points both inside the image boundaries and at
infinity, we express the optimized vanishing point in
polar coordinates (ρ
v
,θ
v
) and map ρ
v
to another vari-
able α
v
defined as α
v
= 1 −1/(ρ
v
+ 1). This maps the
original [0;+∞[ range of ρ
v
to a bounded [0;1] range,
which can be fully explored during the optimization.
Optimization techniques rely on a loss metric to
point them in the direction of a locally optimal so-
lution. To measure how well a given vanishing point
matches the lines present in the original image, we ad-
ditionally develop a novel point-line metric. Indeed,
naive approaches to this problem are not suitable to
the case of vanishing points and thus do not allow
convergence. For example, considering the Euclidean
distance between the lines and point in Hough space
does not yield consistent results: as a consequence of
representing image-space lines as polar coordinates,
the Hough space is composed of distances on one axis
and angles on the other, which are not easily compa-
rable. Similarly, while considering only the point-line
distance in image-space works for vanishing points
situated within the image, this approach fails when
the vanishing point is located outside the image or at
infinity. Indeed, a vanishing point at infinity should be
considered to perfectly match all parallel lines in the
direction of this point. However, the standard point-
line distance does not decrease when the point moves
to infinity, but remains constant (Fig. 8c). Thus it is
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
118
Image
boundary
(a) Notation
𝑃
𝑥
𝑦
Image boundary
𝐶
(b) Ratio Calculation
𝑑
𝑛𝑎𝑖𝑣𝑒
2
𝑑
𝑛𝑎𝑖𝑣𝑒
1
𝑑
𝑣𝑎𝑛𝑖𝑠ℎ𝑖𝑛𝑔
1
𝑑
𝑣𝑎𝑛𝑖𝑠ℎ𝑖𝑛𝑔
2
𝑃
1
𝑃
2
Image
boundary
(c) Vanishing point
moving towards infinity
Image
boundary
𝑃
𝑑
𝑣𝑎𝑛𝑖𝑠ℎ𝑖𝑛𝑔
𝑑
𝑛𝑎𝑖𝑣𝑒
(d) Vanishing point inside
the image boundaries
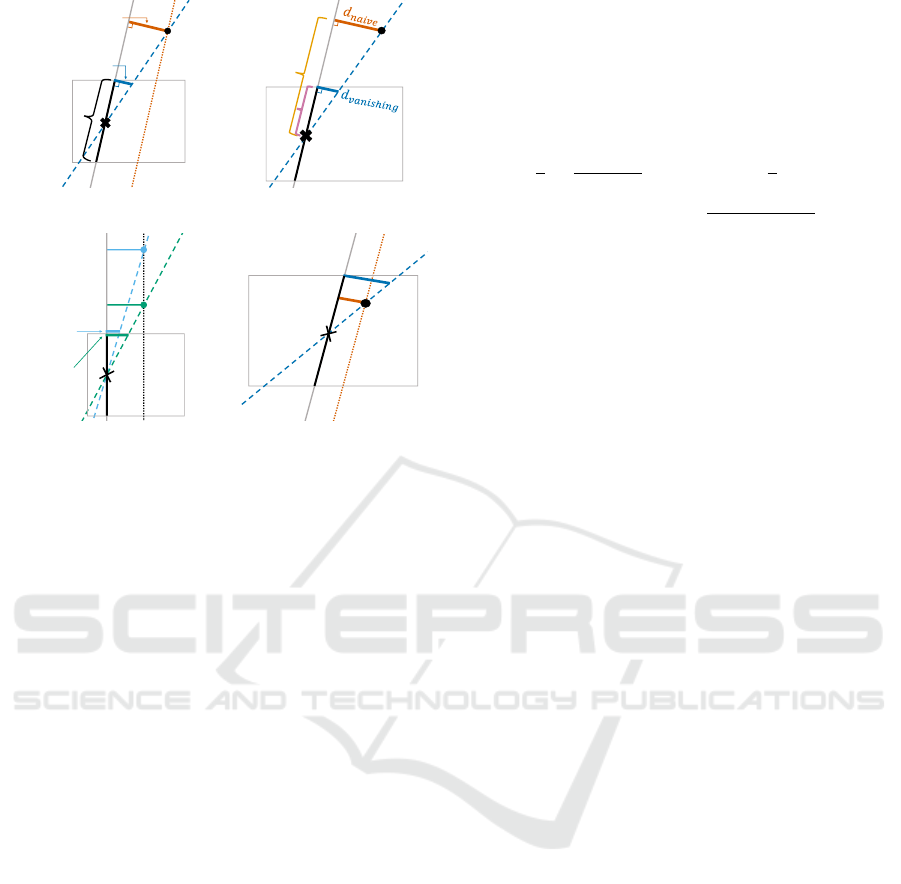
Figure 8: Vanishing point metric calculated by applying
Thales’ theorem and weighting d
naive
with the ratio x/y de-
picted in (b). As can be seen in (c), opposite to the naive
point-line metric, which stays constant for a vanishing point
moving towards infinity (d
1
naive
= d
2
naive
), it decreases when
moving P along l
naive
(d
1
vanishing
> d
2
vanishing
). In case P is
inside the image boundaries, we fall back to d
naive
, which is
then smaller than d
vanishing
(d).
unsuitable for vanishing point optimization.
Instead, we propose the following vanishing point
metric: define the point and line for which we want
to compute the distance as P and l, respectively (see
Fig. 8a). We construct an additional line l
vanishing
passing through P and intersecting the centre C of the
segment s of l, which is limited by the two intersec-
tions between l and the image boundaries (i.e. only
the part of l visible in the image). In practice, l
vanishing
is the line of arbitrary angle that most closely matches
l for the pixels visible in the image. For the sake of
comparison, we can define l
naive
as parallel to l and
passing through P, which represents the naive point-
line distance: the distance d
naive
between l
naive
and l
is the same as the distance between P and l. To com-
pute a distance d
vanishing
between l
vanishing
and l, we
use the distance between l
vanishing
and the endpoint of
s closest to P. Our vanishing point metric is finally de-
fined as min(d
naive
, d
vanishing
). In practice, this means
that our metric is equivalent to the naive point-line
distance while the vanishing point lies roughly within
the image (see Fig. 8d), and then decreases to 0 as the
vanishing point goes to infinity in a direction parallel
to l, even if P does not lie directly on l (see Fig. 8c).
To efficiently compute our proposed vanishing
point metric, we apply Thales’ theorem as illustrated
in Fig. 8b. We weight the naive point-line distance
with the ratio between the distance x from the center
C to the endpoint of s closest to P and the distance y
from C to the point on l closest to P:
x
y
=
d
vanishing
d
naive
⇒ d
vanishing
=
x
y
· d
naive
, (2)
where x = 0.5 · |s| and y =
q
|PC|
2
− d
2
naive
.
We use a custom regressor to optimize the best-
fitting vanishing point given a set of lines in the in-
put image. Thanks to our vanishing point metric, we
match vanishing points both inside the image and at
infinity, and can compute the overall minimized error
after optimization. In order to extract the three van-
ishing points corresponding to the three dimensions
visible in the image, we use the RANSAC algorithm
to successively find groups of lines that converge in a
vanishing point. The algorithm then iterates over the
remaining lines until three vanishing points are found,
as illustrated in Fig. 7. Note that two of the vanish-
ing points, corresponding to the x dimension (orange)
and y dimension (blue), are located at infinity. Con-
sequently, they have (approximately) a unique angle
θ, but are defined for all distances ρ. In contrast, the
vanishing point for the z dimension (yellow) is located
inside the image, and is defined for all angles θ.
5.3 Texture Unwarping
Once the perspective of the image and the three
vanishing points are known, we use this informa-
tion to correct the perspective distortion of the user-
segmented plane containing the lighting setup, recov-
ering the original geometry of the light sources. This
process first establishes a mapping between the input
image and the undistorted space by determining the
two most important dimensions to which lines of the
user-selected region most likely belong. For each of
these two dimensions, we compute the angle of the
line from its corresponding vanishing point to every
pixel. Then, the four corners of an arbitrary axis-
aligned rectangle are selected in undistorted space and
matched to the largest quadrilateral where each pair
of sides has the same angle to one of the selected van-
ishing points. Next, we compute the homography cor-
responding to the transformation between the image-
space quadrilateral and the undistorted-space rectan-
gle. This transform is then applied to the surface se-
lected by the user in order to correct the perspective
of the original image (see Fig. 9).
Single-Exemplar Lighting Style Transfer via Emissive Texture Synthesis and Optimization
119

Figure 9: Texture perspective correction. Left: light mask
in the original image space. Middle: perspective-corrected
light mask. Right: corresponding undistorted zone in the
original image.
6 TEXTURE SYNTHESIS
Once the selected lighting installation has been un-
warped, we use the resulting texture as input of an
example-based texture synthesis algorithm. This step
is important since the target 3D scene can be arbi-
trarily large and as a result require arbitrarily large
textures. In our case, we operate on masked images
of light sources which are often organized follow-
ing very specific patterns. For this reason, modern
deep-learning-based texture synthesis methods would
need to be trained explicitly on data sets of light
source configurations to produce acceptable results.
Instead, in order to guarantee consistent and explain-
able results, we develop our synthesis process bor-
rowing from patch-based methods (Efros and Free-
man, 2001) and the metadata encoding from (Lefeb-
vre and Hoppe, 2005; Lefebvre and Hoppe, 2006).
Most texture synthesis algorithms, especially
pixel-based and patch-based ones, use local informa-
tion in the decision process throughout the algorithm.
This is designed for “dense” textures, where local in-
formation is abundant to optimally choose the neigh-
bouring pixels and patches. In our case of light source
synthesis, where a mask of potentially faraway lights
needs to be generated, there can be large regions of
empty space with no local information available. In
this situation, the algorithm can be fine-tuned to look
for information further away. For patch-based algo-
rithms, this is modelled by the patch size. As Fig. 11
(top row) shows, choosing the right patch size can
drastically change the quality of the result.
To avoid this parameter tweaking, we instead en-
code local information about the texture directly in the
image, in the form of three additional metadata chan-
nels, similar to the approach in (Lefebvre and Hoppe,
2006). To this end, we encode local spatial informa-
tion (horizontal and vertical distance to the nearest
feature), as well as the confidence of the segmentation
model for each pixel as additional distinction between
light sources and background. This additional infor-
(a) Input (b) Risser (c) Heitz et al. (d) Ours
Figure 10: Texture synthesis comparison with recent work:
(b) (Risser, 2020), (c) (Heitz et al., 2021). Due to the spe-
cific attributes of the inputs (importance of negative space,
regularity, missing information), generic synthesis algo-
rithms struggle to provide convincing results.
mation improves spatial coherence in the synthesized
texture. As demonstrated in Fig. 11 (bottom row), this
drastically improves the robustness of the synthesis
algorithm. Indeed, every block size above 25 pix-
els produces high-quality results, and the results are
much more consistent compared to direct synthesis.
Figure 12 summarizes the inputs and outputs of
our texture synthesis. Starting from the unwarped im-
age with the original colours (12a) and its metadata
(12b), we define the input as a masked emissive tex-
ture (12c), where only the light sources are visible.
During synthesis, the input is heavily downsized to
reduce computation times as shown in Fig. 12d. From
this input, the new texture’s colour (12e) and metadata
(12f) are synthesized using an iterative patch-based
approach. The resulting emissive texture is computed
by masking the output using the corresponding gener-
ated metadata, which produces Fig. 12g. As the work-
ing resolution of the generated texture is too low to
be used for rendering purposes, we then upscale the
output texture using information from the original ex-
ample image: for each generated patch, we invert the
transform for this specific patch in the unwarped im-
age, and recover the coordinates of the patch in the
original image. The full-resolution patch is then un-
warped again and added to the final emissive texture,
resulting in a high quality texture visible in Fig. 12h.
Figure 10 shows the difference between our re-
sults and two recent methods. As the figure shows,
the strong regularity, the presence of missing regions
due to unwarping an incomplete image, and the cen-
tral role of negative space, all make generic synthesis
algorithms ill-suited to our specific use-case. In con-
trast, our method puts special care on handling miss-
ing and negative space, which produces a more accu-
rate recreation of the input examples.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
120
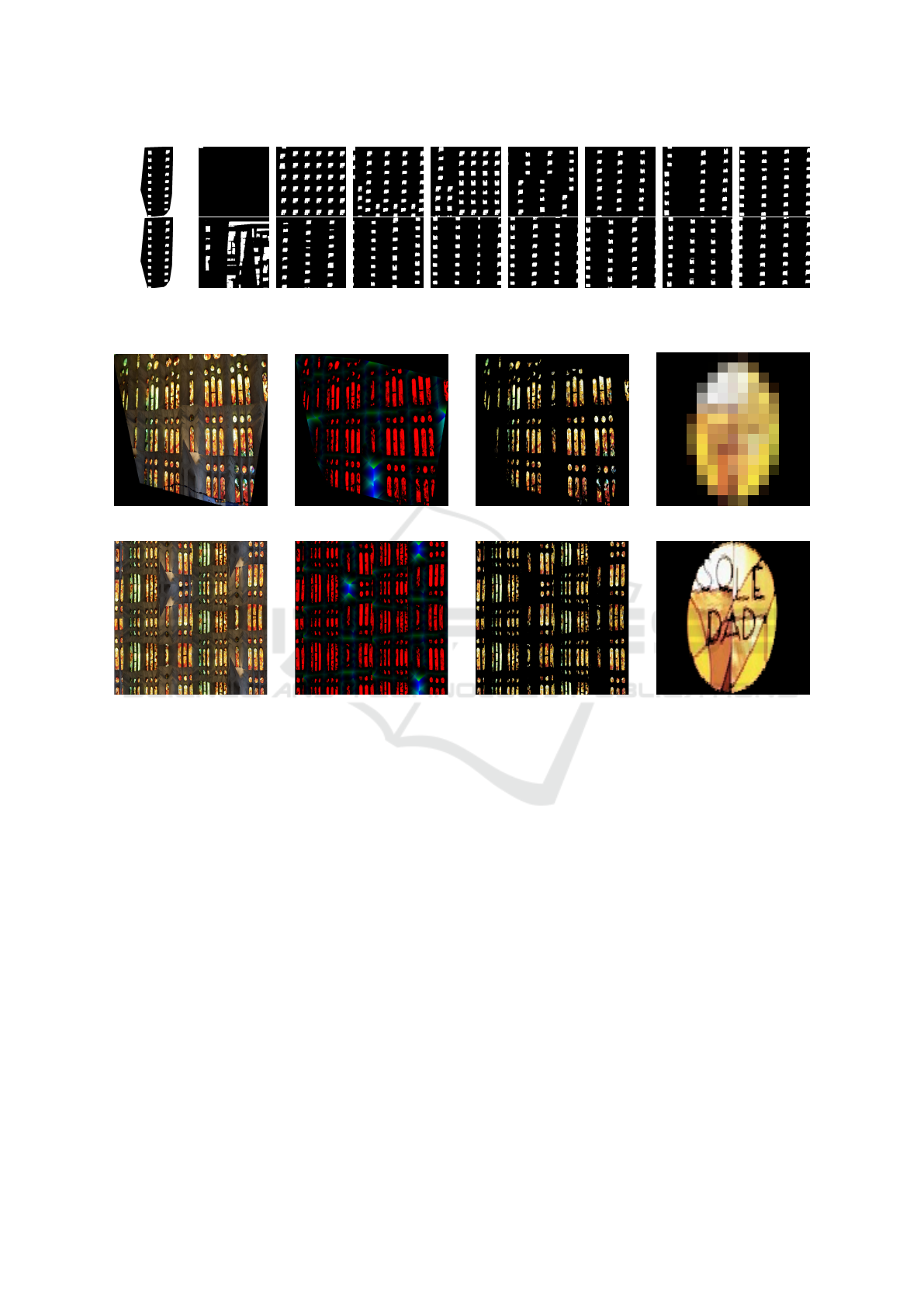
Figure 11: Comparison between direct texture synthesis (top row) and metadata-guided synthesis (bottom row). Including
additional spatial and application specific metadata in the synthesis process provides much more stable results. From left to
right: input, then results with block size varying from 25 pixels to 200 pixels in 25 pixels increases.
(a) Unwarped input (b) Input metadata (c) Emissive texture input (d) Down-scaled input
(e) Synthesized output (f) Output metadata (g) Emissive texture output (h) Recovered detail
Figure 12: Starting from the unwarped extraction of the input image (a), we perform texture synthesis using (b) metadata
(red: segmentation confidence, green and blue: x and y distance to the nearest feature) and the selected lights (c) as input.
For additional speed-up, synthesis operates on a down-scaled version of this input data (d), and produces output data (e) and
metadata (f), which defines the emissive texture (g). We recover full-resolution details in a post-processing step (h).
7 PARAMETER OPTIMIZATION
Finally, for rendering purposes, we apply the synthe-
sized high-quality texture as an emissive texture on
a user-specified surface of the 3D scene. However,
while texture synthesis copies the shape and arrange-
ment of the light sources to the target scene, the ac-
tual appearance of the lighting can still differ from
the input. As illustrated in the middle row of Fig. 13,
a bright white light does not accurately recreate the
mood conveyed by the original image. The global il-
lumination of the scene also heavily depends on the
size of the light sources relative to the target scene.
To account for these effects, we perform a final op-
timization step on the overall colour and intensity of
the emissive texture.
We extract the main colour of the user-selected
surface in the input image excluding light sources.
That is, we compute the average colour of the pix-
els corresponding to the selected surface but not to
light sources on this surface. This approach reduces
the possibility of unrelated objects in the scene af-
fecting the colour of the lighting. We set the target
illumination in the 3D scene, on the same surface
where the emissive texture is applied to this colour
(see Fig. 13, top right). Using a view-independent
framework based on differentiable rendering (Lipp
et al., 2024), we optimize the colour and intensity of
the emissive texture such that the light incident to the
same surface matches the target. Differentiable ren-
dering allows for efficient gradient-based optimiza-
tion of the parameters. Because the target is collo-
Single-Exemplar Lighting Style Transfer via Emissive Texture Synthesis and Optimization
121

Figure 13: Output rendering and optimization. Top row:
original image and target ceiling colour. Middle row: ren-
dering of the initial state white light and arbitrary intensity.
Bottom row: optimized light colour and intensity. The right
column shows the corresponding simplified view used in-
ternally by the optimization framework.
cated with the light source, contributions to the illu-
mination of this surface arise either from the emis-
sive texture itself in the case of a concave surface,
or from indirect illumination scattered back from the
scene. This causes the colour of objects in the scene
to also be reflected in the final colour and intensity of
the light source in order to provide the same overall
impression as the original image. Figure 13 (bottom
row) shows how the 3D scene looks after optimiza-
tion, with the left and right view corresponding to the
final rendered image and the simplified model used
for optimization, respectively.
8 RESULTS
Figures 16 and 17 summarize results generated with
our system and compare to two general-purpose neu-
ral style transfer methods: (Gatys et al., 2015) and (Li
et al., 2018). The input images are shown on the left,
and each input is applied to two different 3D scenes: a
large living room (Fig. 16) and a smaller office space
(Fig. 17). Because interpreting the quality of a light-
ing design is a deeply subjective matter, providing a
numeric validation of our result according to a pre-
cise metric is a difficult task. We instead focus on a
qualitative analysis of the results to showcase how dif-
ferent aspects of the initial lighting configurations are
successfully reproduced in our examples, as well as
a user study to quantify the perception of our results
compared to other transfer methods.
8.1 Qualitative Validation
As we can see in Fig. 16 and 17, using different
input images drastically changes the appearance of
the generated lighting in the 3D scene. The overall
impression of each image is replicated through light
colour and intensity optimization (brightly lit for the
first two, dimly lit for the following two, with dif-
ferent colour temperatures for each). Note that, the
shape of the light sources conveys different meanings
to the scene they illuminate (for example between the
well-spaced round lights of a lounge in the first im-
age, a tight grid of square and round office lights in
the second image, and the stained glass of a church
in the fourth). The effect of the optimization pro-
cess is particularly visible on the results obtained in
Fig. 16. Indeed, the red curtain and the floor, which
has a wooden material, naturally impact the colour
of the light as it is reflected. As a result, the inter-
action of a white light with the floor would produce
a more reddish tint than what would be expected, as
shown in the fifth example. Our optimization auto-
matically compensates by adjusting the colour of the
light to a blue tint, thus keeping the colour of the ceil-
ing and overall scene close to the input image. This
effect can be observed on the back wall, where the
blue tint is particularly visible in the second example.
In contrast, the back wall stays grey in the last exam-
ple, as the colours of the input image already match
the wooden floor.
In comparison, these effects are not visible in any
of the neural style transfer methods, since they only
operate on images and do not take physical light trans-
port into account. These methods only copy the gen-
eral colour palette of the input image without having
access to semantic information about the nature of the
light or objects. As a result, unexpected artifacts are
visible in many of the results produced by the neu-
ral style transfer methods. For example, Fast Photo
Style (Li et al., 2018), produces blue highlights due
to the blue chairs in the lounge scene, and a glowing
curtain (in Fig. 16) and plant (in Fig. 17) in the church
example. The neural style transfer methods achieve
better results the more uniform the input example is,
which is most noticeable in examples 2 and 3.
8.2 User Study
We conducted an online user study via a self-hosted
webform. For all statistical tests, we use the stan-
dard α = 0.05 and, in case of multiple testing, report
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
122
20
60
100
Very
Poor
Poor
Fair
Good
Very
Good
Very
Poor
Poor
Fair
Good
Very
Good
Count
ST
0
20
40
60
FPhS
Ours
Comparison Scene 1: Stage
20
60
100
Count
Input Image: Museum
Church Office Reception Meeting
Comparison Scene 2: Office Room
ST
FPhS
Ours
0
20
40
60
0
20
40
60
0
20
40
60
Very
Poor
Poor
Fair
Good
Very
Good
Very
Poor
Poor
Fair
Good
Very
Good
Very
Poor
Poor
Fair
Good
Very
Good
Very
Poor
Poor
Fair
Good
Very
Good
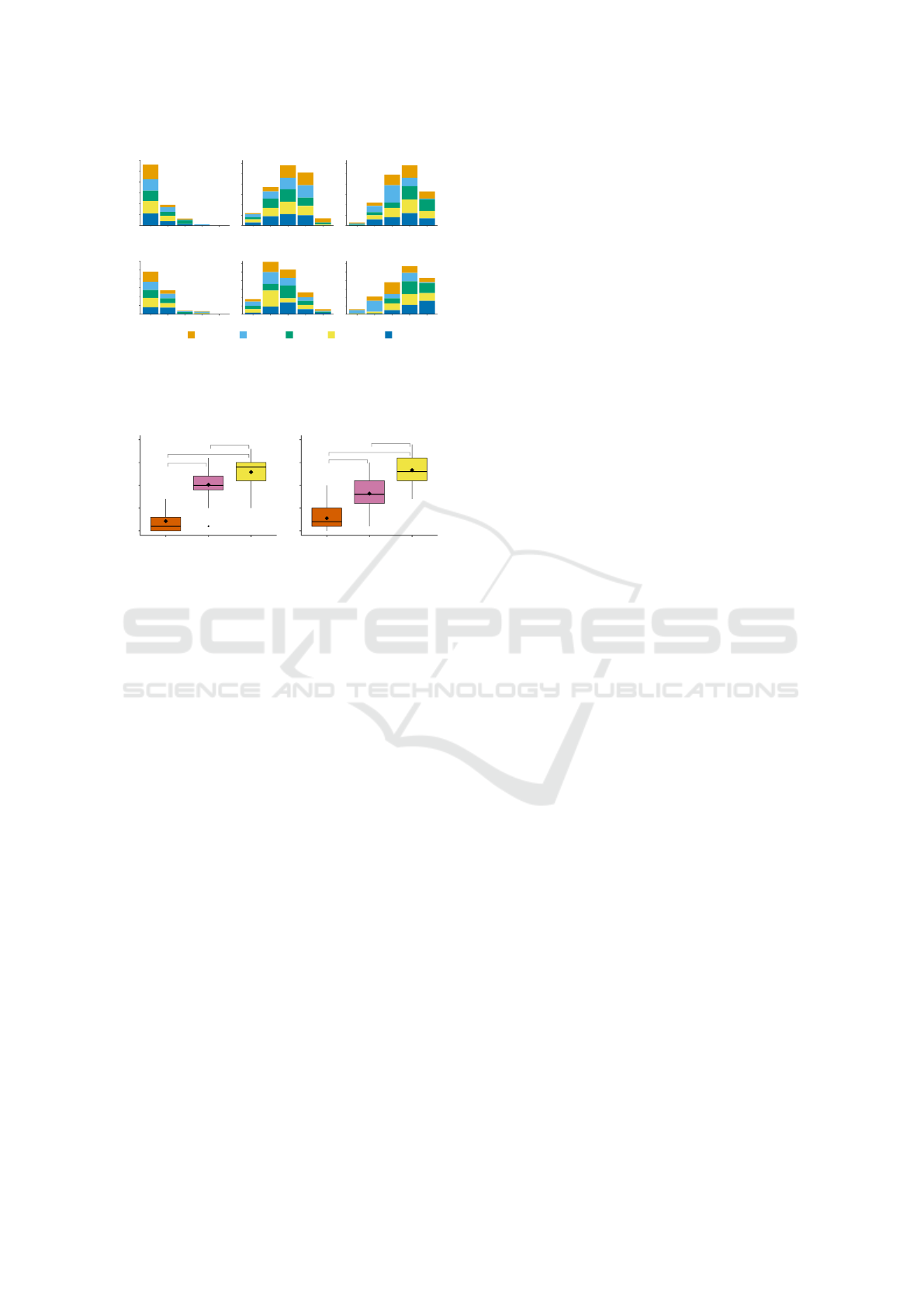
Figure 14: Barplot of the rating results by scene and input
image. Our method is consistently rated higher than previ-
ous work. ‘ST’: Style Transfer (Gatys et al., 2015), ‘FPhS’:
Fast Photo Style (Li et al., 2018).
****
****
**
ST
FPhS
Ours ST
FPhS
Ours
Average Rating
Scene 1: Stage
****
****
****
−2
−1
0
1
2
−2
−1
0
1
2
Average Rating
Scene 2: Office Room
Figure 15: Boxplot of the rating results averaged across
all five input image scenarios (♦ mean, • weak outlier).
Statistically significant relations according to pairwise,
Bonferroni-corrected paired Wilcoxon signed-rank tests are
connected on top, where the number of stars indicates the
significance level (**: p < 0.01, ****: p < 0.0001).
adjusted p-values after applying Bonferroni correc-
tion for better readability. As effect sizes we report
Kendall’s W and Wilcoxon’s r (< 0.3 small, 0.3−0.5
moderate, > 0.5 large).
After participants agreed to our consent form, we
displayed a tutorial section explaining the theoreti-
cal context via exemplary line-art images of a refer-
ence with yellow light and two possible outcomes,
one with blue light (labelled wrong) and one with yel-
low light (labelled correct). The reference had small,
round lighting fixtures on the ceiling, the first re-
sult with blue lights large, rectangular ones, and the
yellow-coloured result no light fixtures at all, so as
not to bias the participants towards our method. Af-
terwards, as an attention question, we displayed the
same line-art images again and asked which image
captures the lighting setup more accurately.
In the main body of the survey, participants first
had to compare our method against results from style
transfer (ST) (Gatys et al., 2015) and Fast Photo Style
(FPhS) (Li et al., 2018) with five different input im-
ages applied to two target 3D scenes, resulting in the
ten scenarios shown in Fig. 16 (Scene 1: Stage) and
Fig. 17 (Scene 2: Office Room). The order of the
scenes was fixed, but the order of the different in-
put image scenarios was randomized for each par-
ticipant. Within each input image scenario, the or-
der of the methods was fixed for all participants, but
varied between different input images. For each re-
sult image, participants were asked to rate on a five-
point labelled scale how well it represents how the
lighting of the reference image would look like in
the given 3D scene. Next, we showed them three
flavours of our method (before optimization, and op-
timizing wrt. ceiling colour or overall colour) applied
to three different combinations of input image and 3D
scene and asked them to choose their favourite. While
we used the ceiling colour by default in our results,
we also presented optimization based on the average
colour of the whole image as an alternative since it
includes more information about the input.
Overall, we collected 38 submissions. After filter-
ing out four participants who answered the attention
question wrongly and one who stated an unrealistic
age of 99, we end up with a study population of N =
33 (female = 13, male = 16, diverse = 4), where the
participants’ age ranged from 21 to 60 (mean = 33.5,
std. dev. = 14.4). When asked about their main area
of expertise, two stated “art”, 18 “computer graphics”
and 13 “other”. 20 participants indicated they regu-
larly work with digital 3D models or scene represen-
tations (including renderings thereof) and 16 partici-
pants affirmed that lighting plays an important role in
their professional or amateur work.
The rating results for each combination of a 3D
scene, input image and method are shown in Fig. 14.
While ST consistently was rated as mostly ‘Very
Poor’, FPhS achieved slightly better ratings in Scene
1 (mode = ‘Fair’) than in Scene 2 (mode = ‘Poor’).
For our method (both scenes: mode = ‘Good’), the
church input image for Scene 2 received the low-
est rating (mode = ‘Poor’), whereas the meeting
room image for Scene 2 received the highest rating
(mode = ‘Very Good’). To test the hypothesis that our
method is rated as better at representing the light setup
of a reference image in a 3D scene, we converted the
ratings to a zero-centred, numerical scale and for each
scene averaged the results across all five input im-
ages. As Shapiro-Wilk tests show a violated normal-
ity assumption, we apply a Friedmann test (the non-
parametric alternative to a one-way repeated mea-
sures ANOVA) to examine the differences between
the methods’ average ratings. For both scenes we find
significant differences with large effect sizes (Scene
1: χ
2
(2) = 44.4, p = 2e-10, W = .673; Scene 2:
χ
2
(2) = 51.3, p = 7e-12, W = .777). To further inves-
tigate this, we conduct paired Wilcoxon signed-rank
tests (see Fig. 15). The highest p-value was found be-
tween our method and FPhS for scene 1 (p = 0.006,
r = 0.527), for all other combinations: p < 1e-5 and
Single-Exemplar Lighting Style Transfer via Emissive Texture Synthesis and Optimization
123
Inputs42
Method
Style transfer
(Gatys et al., 2015)
Fast Photo Style
(Li et al., 2018)
Ours
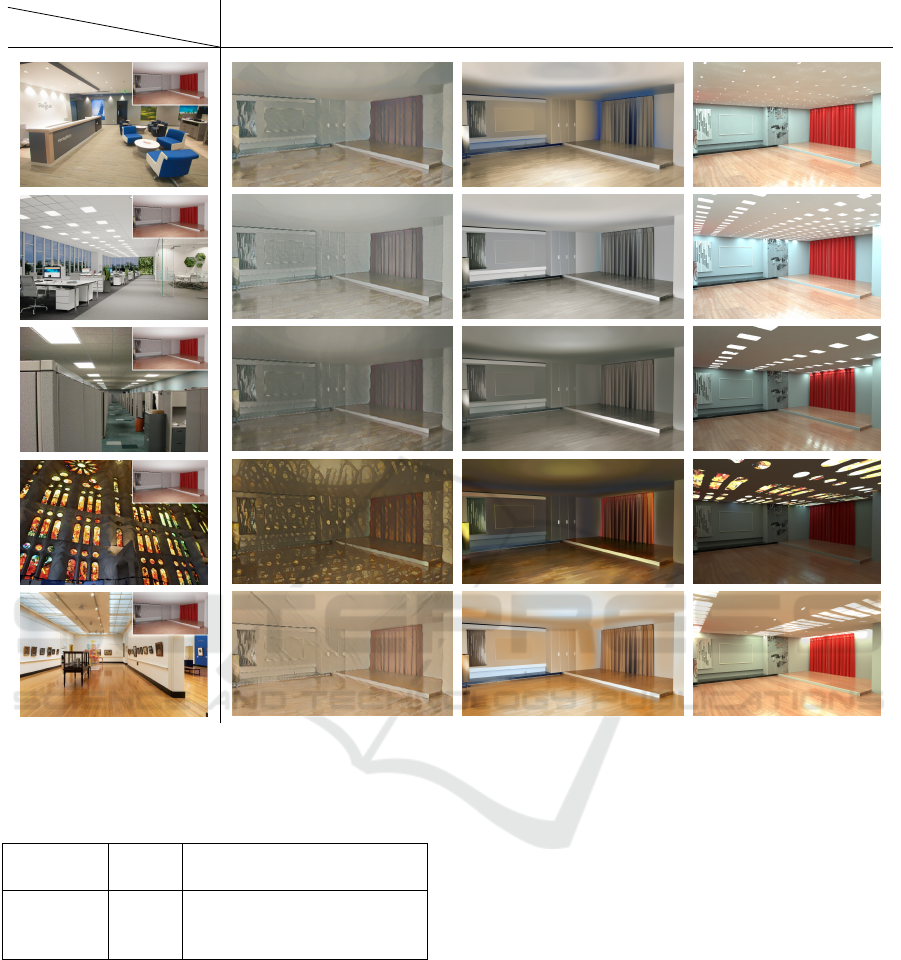
Figure 16: Table of results comparing our method to two deep-learning based general style transfer methods. The leftmost
column shows the different input images, as well as the 3D scene where the lighting is copied as an inset.
Table 1: Number of participants choosing a flavour of our
method by input image and scene.
Input Scene
Before
Opt.
Ceiling
Colour
Overall
Colour
Office Stage 3 13 17
Reception Stage 2 28 3
Church Office 1 7 25
r > 0.764.
Regarding the flavour of our method, there is
no clear winner between optimizing wrt. the ceiling
colour or overall colour as can be seen in Table 1. The
choice seems to be scene dependent and could thus be
left to the user as an adjustable parameter.
9 CONCLUSION
In this paper, we presented a novel copy-paste lighting
style transfer approach from a single image to a 3D
target scene. In contrast to machine-learning-based
solutions, our method allows for interactive control
by the user, and does not require specialized exper-
tise. Our results are physically plausible, as we simu-
late the full light transport in the 3D scene, contrary to
image-based methods. Our approach relies on a few
assumptions, which currently reduce the range of ad-
missible input images: light sources must be directly
visible, and sufficient scene context is needed for the
perspective correction. We typically operate on inte-
riors, but images of exterior scenes satisfying these
criteria could also be used.
Using emissive textures as a way to encode and
copy the lighting configuration of the input image
also incurs some limitations: lights are expected to
lie on or close to a surface for accurate modelling, as
hanging light fixtures cannot be represented solely by
emissive textures.
Within these assumptions, however, our method
presents the first interactive single-image, physically-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
124
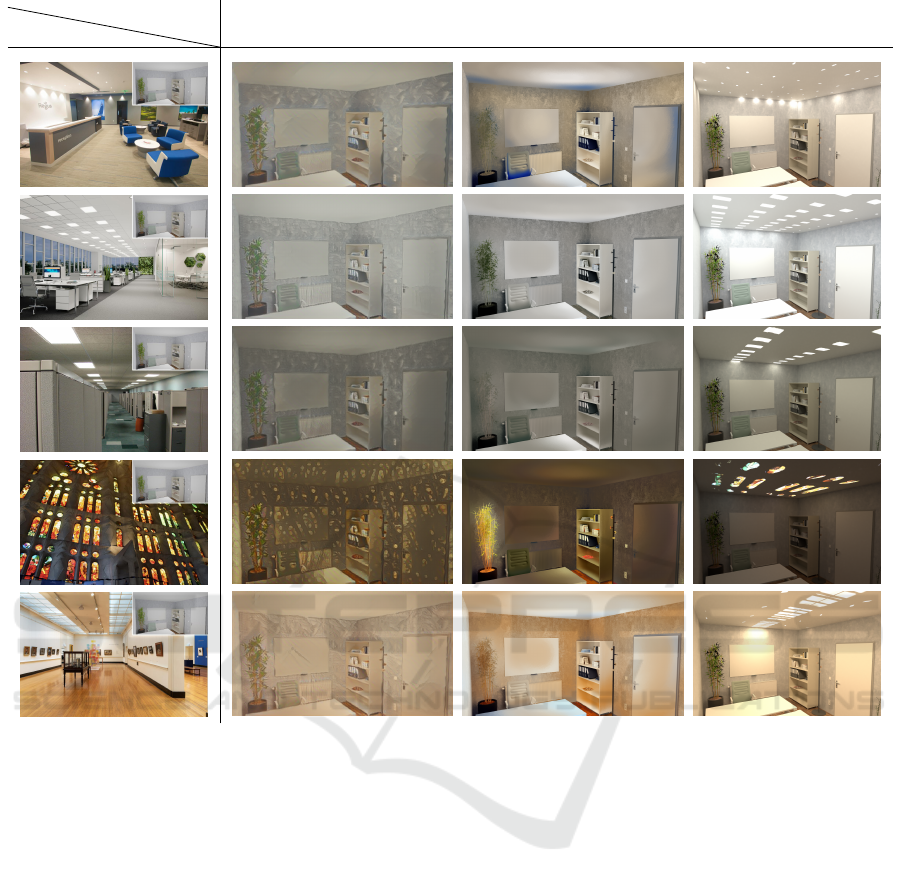
Inputs42
Method
Style transfer
(Gatys et al., 2015)
Fast Photo Style
(Li et al., 2018)
Ours
Figure 17: Similar table of results as Fig. 16, but applied to a 3D scene of a small office.
based lighting style transfer method. We produce ex-
plainable and controllable results that can be gener-
ated by novice and expert users alike. Furthermore,
we show statistically significant improvements in the
perceived quality of our lighting transfer compared to
image-based neural style transfer approaches.
In the future, we plan to extend our approach from
texture synthesis towards generating 3D geometry for
light fixtures. Furthermore, allowing for multiple
lighting style images as inputs to produce a combi-
nation of these styles in the resulting 3D scene could
allow for more interactive exploration of the available
design space. We also envision a combination of our
method with other generative machine-learning ap-
proaches, or optimization-based methods, in order to
build a comprehensive digital lighting design toolkit.
ACKNOWLEDGEMENTS
This project has received funding from the Austrian
Science Fund (FWF) project F 77 (SFB “Advanced
Computational Design”).
REFERENCES
Anrys, F., Dutr
´
e, P., and Willems, Y. D. (2004). Image-
based lighting design. In Proc. 4th IASTED Interna-
tional Conference on Visualization, Imaging, and Im-
age Processing.
Canny, J. (1986). A computational approach to edge detec-
tion. Pattern Analysis and Machine Intelligence, IEEE
Transactions on, PAMI-8:679 – 698.
Chen, X., Jia, R., Ren, H., and Zhang, Y. (2010). A New
Vanishing Point Detection Algorithm Based on Hough
Transform. In 3rd International Joint Conference on
Computational Science and Optimization, volume 2,
pages 440–443.
Single-Exemplar Lighting Style Transfer via Emissive Texture Synthesis and Optimization
125

DIAL GmbH (2022). Dialux evo 10.1.
Diamanti, O., Barnes, C., Paris, S., Shechtman, E., and
Sorkine-Hornung, O. (2015). Synthesis of Complex
Image Appearance from Limited Exemplars. ACM
Transactions on Graphics, 34(2):1–14.
Duda, R. O. and Hart, P. E. (1972). Use of the hough trans-
formation to detect lines and curves in pictures. Com-
mun. ACM, 15(1):11–15.
Efros, A. A. and Freeman, W. T. (2001). Image quilting for
texture synthesis and transfer. In Proc. SIGGRAPH
’01, pages 341–346. ACM.
Efros, A. A. and Leung, T. K. (1999). Texture synthesis
by non-parametric sampling. In Proc. ICCV, pages
1033–1038. IEEE.
Eisenacher, C., Lefebvre, S., and Stamminger, M. (2008).
Texture Synthesis From Photographs. Computer
Graphics Forum, 27(2):419–428.
Fr
¨
uhst
¨
uck, A., Alhashim, I., and Wonka, P. (2019). Tile-
GAN: synthesis of large-scale non-homogeneous tex-
tures. ACM Transactions on Graphics, 38(4):1–11.
Gatys, L. A., Ecker, A. S., and Bethge, M. (2015). A neural
algorithm of artistic style. arXiv:1508.06576.
Gkaravelis, A. (2016). Inverse lighting design using a cov-
erage optimization strategy. The Visual Computer,
32(6):10.
Heitz, E., Vanhoey, K., Chambon, T., and Belcour, L.
(2021). A Sliced Wasserstein Loss for Neural Texture
Synthesis. In IEEE CVPR 2021, pages 9407–9415.
Jakob, W., Speierer, S., Roussel, N., Nimier-David, M.,
Vicini, D., Zeltner, T., Nicolet, B., Crespo, M.,
Leroy, V., and Zhang, Z. (2022). Mitsuba 3 renderer.
https://mitsuba-renderer.org.
Jin, S. and Lee, S.-H. (2019). Lighting Layout Optimization
for 3D Indoor Scenes. Computer Graphics Forum,
38(7):733–743.
Jing, Y., Yang, Y., Feng, Z., Ye, J., Yu, Y., and
Song, M. (2018). Neural style transfer: A review.
arXiv:1705.04058.
Kawai, J. K., Painter, J. S., and Cohen, M. F. (1993). Ra-
dioptimization: goal based rendering. In Proc. SIG-
GRAPH ’93, pages 147–154. ACM.
Kwatra, V., Essa, I., Bobick, A., and Kwatra, N. (2005).
Texture Optimization for Example-based Synthesis.
In Proc. SIGGRAPH ’05, pages 795–802.
Kwatra, V., Schodl, A., Essa, I., Turk, G., and Bobick, A.
(2003). Graphcut Textures: Image and Video Synthe-
sis Using Graph Cuts. In Proc. SIGGRAPH ’03, pages
277–286.
Lefebvre, S. and Hoppe, H. (2005). Parallel con-
trollable texture synthesis. ACM Trans. Graph.,
24(3):777–786.
Lefebvre, S. and Hoppe, H. (2006). Appearance-space tex-
ture synthesis. ACM Trans. Graph., 25(3):541–548.
Li, Y., Liu, M.-Y., Li, X., Yang, M.-H., and Kautz, J. (2018).
A closed-form solution to photorealistic image styl-
ization. arXiv:1802.06474.
Lin, W.-C., Huang, T.-S., Ho, T.-C., Chen, Y.-T., and
Chuang, J.-H. (2013). Interactive Lighting Design
with Hierarchical Light Representation. Computer
Graphics Forum, 32(4):133–142.
Lipp, L., Hahn, D., Ecormier-Nocca, P., Rist, F., and Wim-
mer, M. (2024). View-independent adjoint light trac-
ing for lighting design optimization. ACM Transac-
tions on Graphics, 43(3):1–16.
Liu, S., Zhou, Y., and Zhao, Y. (2021). VaPiD: A Rapid
Vanishing Point Detector via Learned Optimizers. In
Proc. ICCV 2021, pages 12839–12848.
Magee, M. and Aggarwal, J. (1984). Determining vanish-
ing points from perspective images. Computer Vision,
Graphics, and Image Processing, 26(2):256–267.
Okabe, M., Matsushita, Y., Shen, L., and Igarashi, T.
(2007). Illumination Brush: Interactive Design of All-
Frequency Lighting. In 15th Pacific Conference on
Computer Graphics and Applications (PG’07), pages
171–180. IEEE.
Pellacini, F., Battaglia, F., Morley, R. K., and Finkelstein,
A. (2007). Lighting with paint. ACM Transactions on
Graphics, 26(2):9.
Ranftl, R., Lasinger, K., Hafner, D., Schindler, K., and
Koltun, V. (2022). Towards Robust Monocular Depth
Estimation: Mixing Datasets for Zero-Shot Cross-
Dataset Transfer. IEEE Trans. Pattern Anal. Mach.
Intell., 44(3):1623–1637.
Relux Informatik AG (2022). Reluxdesktop.
Ren, H., Fan, H., Wang, R., Huo, Y., Tang, R., Wang,
L., and Bao, H. (2023). Data-driven digital light-
ing design for residential indoor spaces. ACM Trans.
Graph., 42(3).
Risser, E. (2020). Optimal textures: Fast and robust texture
synthesis and style transfer through optimal transport.
CoRR, abs/2010.14702.
Schoeneman, C., Dorsey, J., Smits, B., Arvo, J., and Green-
berg, D. (1993). Painting with light. In Proc. SIG-
GRAPH ’93, pages 143–146. ACM.
Schwarz, M. and Wonka, P. (2014). Procedural Design of
Exterior Lighting for Buildings with Complex Con-
straints. ACM Transactions on Graphics, 33(5):1–16.
Sendik, O. and Cohen-Or, D. (2017). Deep correlations for
texture synthesis. ACM Trans. Graph., 36(5):1–15.
Sorger, J., Ortner, T., Luksch, C., Schw
¨
arzler, M., Groller,
E., and Piringer, H. (2016). LiteVis: Integrated Vi-
sualization for Simulation-Based Decision Support in
Lighting Design. IEEE TVCG, 22(1):290–299.
Tong, X., Zhang, J., Liu, L., Wang, X., Guo, B., and
Shum, H.-Y. (2002). Synthesis of Bidirectional Tex-
ture Functions on Arbitrary Surfaces. In Proc. SIG-
GRAPH ’02, pages 665–672.
Walch, A., Schw
¨
arzler, M., Luksch, C., Eisemann, E., and
Gschwandtner, T. (2019). LightGuider: Guiding In-
teractive Lighting Design using Suggestions, Prove-
nance, and Quality Visualization. IEEE TVCG.
Wu, J., Zhang, L., Liu, Y., and Chen, K. (2021).
Real-time vanishing point detector integrating under-
parameterized ransac and hough transform. In Proc.
ICCV 2021, pages 3732–3741.
Zhang, C., Miller, B., Yan, K., Gkioulekas, I., and Zhao,
S. (2020). Path-space differentiable rendering. ACM
Transactions on Graphics, 39(4).
Zhou, Q.-Y., Park, J., and Koltun, V. (2018a). Open3D:
A modern library for 3D data processing.
arXiv:1801.09847.
Zhou, Y., Zhu, Z., Bai, X., Lischinski, D., Cohen-Or, D.,
and Huang, H. (2018b). Non-Stationary Texture Syn-
thesis by Adversarial Expansion. arXiv:1805.04487.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
126
