
Canine Action Recognition: Exploring Keypoint and Non-Keypoint
Approaches Enhanced by Synthetic Data
Barbora Bez
´
akov
´
a
a
and Zuzana Berger Haladov
´
a
b
Faculty of Mathematics, Physics and Informatics, Comenius University, Bratislava, Slovakia
Keywords:
Convolutional Neural Networks, Action Recognition, Generative Models, Pose Estimation.
Abstract:
This study focuses on the implementation of deep neural networks capable of recognizing actions from dog
photographs. The objective is to implement and compare two approaches. The first approach uses pose
estimation, where keypoints and their positions on photographs are analyzed to recognize the performed action.
The second approach focuses on recognizing actions in photographs without the need of pose estimation. The
image dataset was created using generative models and augmented to increase variability. Results show that
combining synthetic and real data effectively addresses the challenge of limited amount of annotated datasets
in the field of dog action recognition. It is demonstrated that the integration of artificially generated data into
training process can lead to effective results when tested on real-world photographs.
1 INTRODUCTION
Recognizing animal actions is a critical yet inherently
complex task due to the wide variability in movement
patterns, environmental conditions, and the scarcity
of annotated data specific to this application. Despite
these challenges, the significance of action recogni-
tion cannot be overstated, as it forms the foundation
for numerous applications aimed at improving animal
welfare and management. From veterinary care to an-
imal training and wildlife monitoring, accurate action
recognition enables better decision-making, enhances
safety, and promotes animal well-being.
This study focuses on recognizing canine actions
in four primary categories: sit, stand, lay down, and
run, by employing deep neural networks. We com-
pare methodologies that incorporate keypoint detec-
tion with those that operate without it.
Due to limited annotated data for canine actions,
we investigate synthetic data generation to augment
existing datasets. This approach could reduce reliance
on extensive manual annotations, showing how syn-
thetic data can enhance model training and general-
ization on real data.
The goal of pose estimation is to determine the po-
sition and orientation of humans or animals in space.
This process works by localizing keypoints, whose
a
https://orcid.org/0009-0003-7275-6843
b
https://orcid.org/0000-0002-5947-8063
number and placement depend on the specific task.
In pose estimation, the keypoints are typically various
points on the head and major joints of the body. Ac-
tion recognition involves identifying the movements
performed by the observed subject.
A significant challenge in action recognition from
still images, as opposed to videos, is the absence of
temporal features, which can make it difficult to accu-
rately represent actions. This limitation is why pose
estimation is often integrated into action recognition
models. Integrating pose estimation into an action
recognition model can help improve the accuracy of
action identification, as it captures the positioning of
objects within the photograph (Girish et al., 2020).
The structure of this study is organized as follows:
Section 2 reviews relevant prior work in the fields of
action recognition and pose estimation. Section 3 out-
lines the pipeline used throughout the process. Sec-
tion 4 details the datasets, both existing and newly
created, while Section 5 covers the implementation
and evaluation of the deep learning models. Finally,
the study concludes with key findings in Section 6.
2 PREVIOUS WORK
Computer vision systems for tracking animals en-
able continuous, non-intrusive monitoring, which
helps detect signs of stress, illness, or environmental
changes early. By reducing the need for human pres-
584
Bezáková, B. and Haladová, Z. B.
Canine Action Recognition: Exploring Keypoint and Non-Keypoint Approaches Enhanced by Synthetic Data.
DOI: 10.5220/0013195000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
584-591
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
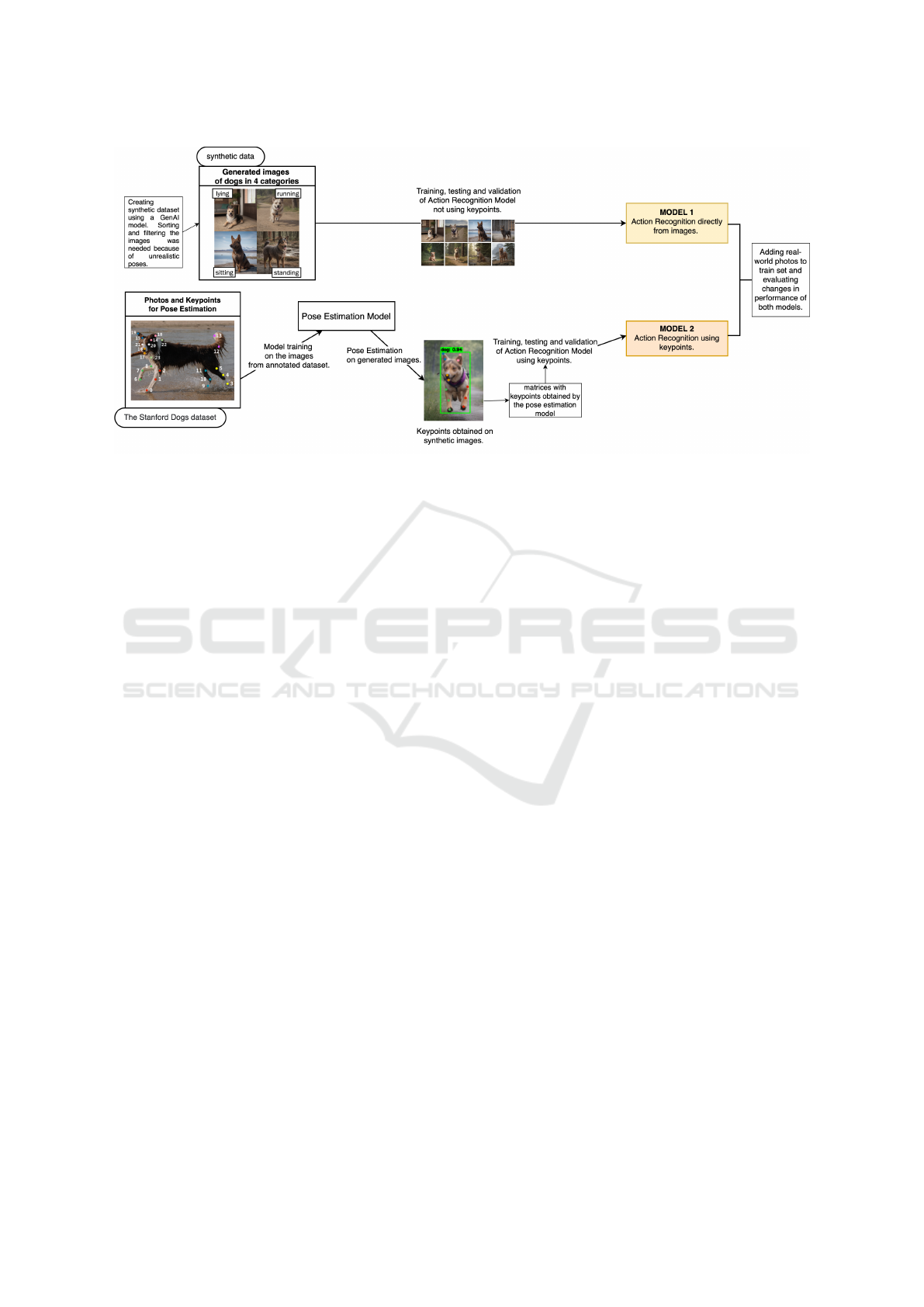
Figure 1: Pipeline of the process described in this study.
ence, it minimizes stress and allows remote observa-
tion, making it ideal for large-scale animal manage-
ment and improved welfare (Fernandes et al., 2020).
The Stanford Dog Dataset (Khosla et al., 2011)
was created to support computer vision tasks related
to dog breeds. It contains images of 120 different dog
breeds captured in various environments and lighting
conditions. The dataset was subsequently annotated
with 24 keypoints marking the positions of different
points on the head, body, tail and legs (Biggs et al.,
2020) and made it a valuable resource for training
pose estimation models.
To address the current challenges in animal pose
estimation, a comprehensive overview highlights key
issues, including the scarcity of annotated datasets
(Jiang et al., 2022). This work classifies 2D pose es-
timation, which focuses on detecting the 2D coordi-
nates of keypoints, based on the number of animals in
the scene, distinguishing between single-animal and
multi-animal pose estimation.
The use of advanced approaches, such as leverag-
ing GPT-inspired architectures and datasets like An-
imalML3D for generating realistic animal motions
(Yang et al., 2024), offers valuable insights. While
not applied here, such methods could enrich work like
ours in future research.
The widely popular and effective YOLO algo-
rithm (Jocher et al., 2023a) is currently used in the
field of computer vision for object detection, image
segmentation, pose estimation, and classification. In
this paper, we will use a pre-trained model for classi-
fication.
Action recognition from RGB data presents sig-
nificant challenges due to background variability, dif-
fering viewpoints, and lighting conditions, all of
which can reduce model accuracy (Sun et al., 2022).
3 PIPELINE
The pipeline shown in Figure 1 is divided into two
distinct sections representing the development of two
action recognition models. In the upper part, we
present the steps undertaken to train an action recog-
nition model that classifies actions directly from im-
ages. Initially, synthetic images were generated using
deep learning model, categorized into four classes: ly-
ing, running, sitting, and standing. Following this, the
training, testing, and validation of the action recog-
nition model were performed. A pre-trained YOLO
classification model yolo served as the backbone for
extracting image features relevant to action recogni-
tion (Jocher et al., 2023b).
The lower part illustrates the process of develop-
ing an action recognition model using keypoint-based
pose estimation. The initial step consisted of utiliz-
ing a dataset containing canine images annotated with
keypoints, which was essential for training the pose
estimation model. This model was applied to the syn-
thetic images to detect body keypoints. Subsequently,
the extracted keypoint coordinates were used to train,
test, and validate an action recognition model using
keypoint coordinates.
While the pipeline itself illustrates the develop-
ment of these models, the subsequent sections of this
paper will delve into the limitations of each method,
providing an evaluation of their accuracy. In the end
of paper, we will show how we can combine real pho-
tographs and generated data to improve the perfor-
mance of action recognition models.
Canine Action Recognition: Exploring Keypoint and Non-Keypoint Approaches Enhanced by Synthetic Data
585

4 DATASETS
Large datasets with publicly available photos, like Im-
ageNet (Deng et al., 2009), are commonly used to
train deep learning models. However, there is no
annotated database specifically suited to the task we
address in this paper. To create a sufficiently large
dataset, we would need to source images from multi-
ple collections. For instance, we examined the COCO
dataset (Lin et al., 2015), which includes image cap-
tions such as the following:
{"image_id": 65485,"id": 18520,
"caption": "A black dog sitting on
top of a boat. this is a black dog
riding on a boat. A dog that is
sitting on a boat. A black dog is sitting
on the bed of a boat The black dog sits
on a boat that is on the water."}
The text corresponds to the image shown in Fig-
ure 2b. Using an online search tool COCO Captions
Explorer (Department of Computer Science at Rice
University, 2020), we estimated the number of images
available for each category. While categories such
as ”sit,” ”stand”, and ”lay” contained around 1000 to
1600 images, we encountered difficulties with ”run”,
as searching for the phrase ”running dog” returned
only 192 images. Finding enough images would re-
quire searching for synonyms, and even then, irrele-
vant results would likely need filtering.
This limitation, combined with the presence of
mislabeled or irrelevant images, made the task of
building a reliable dataset difficult. When we
searched for ”standing dog” we found some images
like shown in Figure 2a. The same problem is with
other webpages like Flickr or Shutterstock. For these
reasons, we chose to generate our own data using deep
learning models. This approach allowed us to cre-
ate a dataset of images featuring dogs in four specific
poses: standing, lying, sitting, and running.
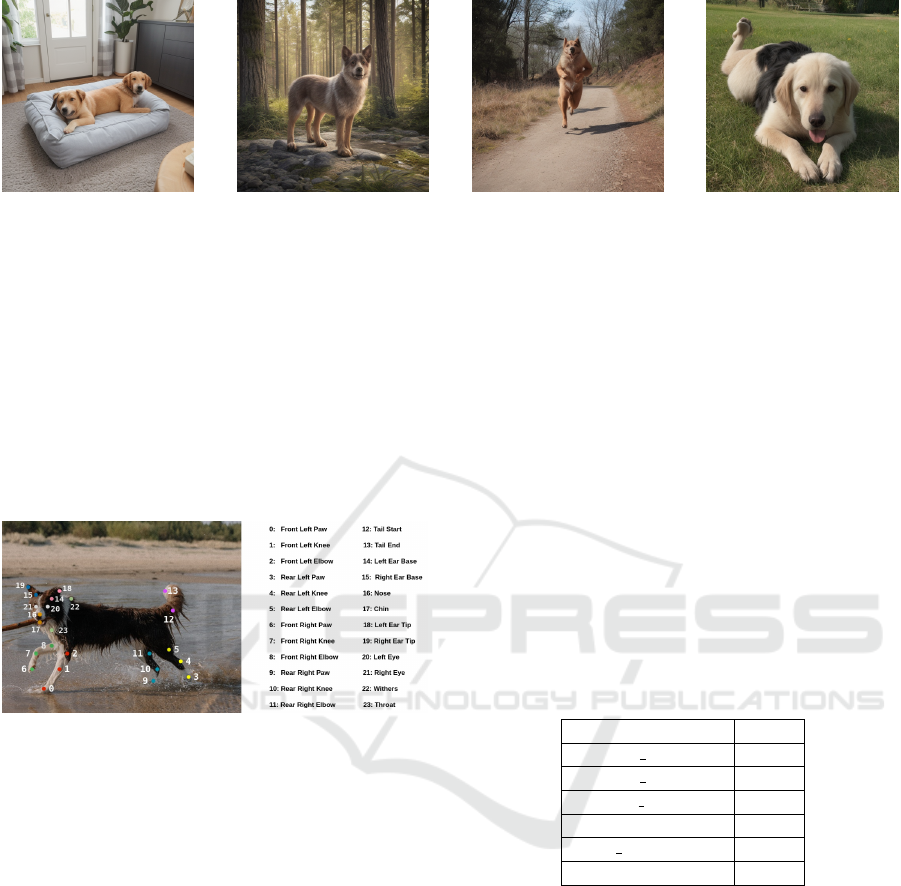
(a) (b)
Figure 2: Examples of dog images from the COCO dataset.
4.1 Synthetic Image Generation
Scraping and sorting datasets requires not only col-
lecting large volumes of images but also manually an-
notating them, which is time-consuming. In contrast,
generating synthetic images produces pre-annotated
data directly aligned with specified actions. Although
some filtering is required to exclude unrealistic poses,
this approach appears to be a more efficient and scal-
able solution.
To generate images for training of the network fo-
cused on action recognition, we utilized the Stabili-
tyMatrix (LykosAI, 2024) interface. It allowed us to
load a model for image generation from civitai.com
and huggingface.co, where we identified and selected
the Realistic Vision V6.0 B1 model (Realistic Vision,
2024).
The settings used for generating images were as
follows: the CFG scale, which controls how strictly
the image generation process follows the given text
input, was set to 2. Higher values make the image
conform more closely to the text, but maximum set-
tings do not always yield the best results, as strict con-
formity may reduce diversity and quality. The steps
parameter was set to 100, determining how many it-
erations the process would undergo, with noise be-
ing gradually removed at each step. The sampler
method chosen was Euler Ancestral, referring to the
approach used for noise removal during image gener-
ation (getimg.ai, 2024). The image dimensions were
set to 512 × 512 pixels.
4.1.1 Prompt Creation
In prompt engineering for generating images from
text, subject terms are essential for precise image cre-
ation. Prompt modifiers are used to enhance image
quality and gain greater control over the generation
process. Negative prompts can filter out specific sub-
jects or styles, while positive prompts allow for style
blending. Prompt writing is an iterative process, be-
ginning with subject terms followed by adding modi-
fiers and solidifiers (Oppenlaender, 2022).
Initially, we used simple prompts like ”a sitting
dog” for image generation, but this method proved in-
effective, resulting in significantly lower quality im-
ages, such as dogs with distorted body parts. We
found that longer, more detailed prompts yielded bet-
ter results. Prompts such as ”a photorealistic sit-
ting dog in a photorealistic environment” and ”a pho-
torealistic dog sitting on a street, side view, floppy
ears”, along with negative prompts like ”disfigured,
deformed”. These refined prompts were applied to
generate images across all four categories.
Despite specifying poses, errors occurred, such
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
586
(a) (b) (c) (d)
Figure 3: Examples of synthetic images with unusual features and misplaced body parts are shown. In Figure 3a, two dogs are
merged into a single body. Figure 3b depicts a dog with extra limbs, which could also pose challenges during pose estimation.
The dog in Figure 3c resembles a human figure, while the dog in Figure 3d has a completely distorted body.
as dogs lying instead of sitting, body deformations,
missing or extra limbs, blurred parts, or human-like
appearances (see Figures 3a–3d). To ensure each
category contained at least 1000 images, we gener-
ated 1.5–2 times this amount and manually selected
distortion-free images for training.
4.2 Data for Pose Estimation
Figure 4: Keypoints and their positions. The keypoints are
consistently ordered, ensuring data uniformity throughout
the processing pipeline.
We used the previously mentioned Stanford Dog
Dataset (Khosla et al., 2011) to train a pose estima-
tion model. In addition to obtaining data with images
of dogs and corresponding keypoint files from Stan-
fordExtra (Biggs et al., 2020), several further steps
were necessary for our work. Since the keypoint data
was annotated separately and were not part of the
original database, they had to be obtained indepen-
dently, following the instructions provided in the orig-
inal repository (Biggs et al., 2020).
The specific keypoints selected by the annotation
creators in the utilized dataset are shown in Figure 4.
These 24 keypoints were chosen to accurately cap-
ture the position of the body. The order of these key-
points is consistently maintained, meaning that key-
point number 0 (left front paw) will always represent
the first point in any representation.
After obtaining all the necessary data, we split
them into training, validation, and test sets. The
data was divided by the authors into corresponding
groups, with 6773, 4062, and 1703 samples, respec-
tively. Each folder contained images and their cor-
responding text files with keypoint coordinates. The
dataset, which included keypoint coordinates, was not
always entirely accurate, and errors likely occurred
during the annotation process.
5 IMPLEMENTATION
5.1 Pose Estimation Model
The pose estimation model was trained with the pa-
rameters listed in Table 1; this process was adapted
from the method described by Dawn (Dawn, 2023).
Table 1: Training parameters for the pose estimation model.
Parameter Value
IMAGE SIZE 512
BATCH SIZE 16
CLOSE MOSAIC 10
MOSAIC 0.4
FLIP LR 0.0
EPOCHS 150
We used the trained model to obtain keypoints for
dogs on the generated images. The normalized key-
points were then saved into text files. The keypoints
obtained for the entire database of generated images
will be used for training and testing a model designed
for action recognition using keypoints. The goal is
to determine the performed action based on the posi-
tion of the keypoints. We transformed the keypoints
into matrices. The dimensions of each matrix are
24 × 3, where the first column always represents the
x-coordinate, the second represents the y-coordinate,
and the third indicates the visibility of the correspond-
ing keypoint. Each row of the matrix thus represents a
single keypoint on the body, as shown in the example
in Figure 5.
Canine Action Recognition: Exploring Keypoint and Non-Keypoint Approaches Enhanced by Synthetic Data
587

A =
x
1
y
1
v
1
x
2
y
2
v
2
.
.
.
.
.
.
.
.
.
x
24
y
24
v
24
B =
0.54 0.2 2
0.0 0.0 0
.
.
.
.
.
.
.
.
.
0.12 0.56 2
Figure 5: Matrices with keypoints. Matrix A represents
the general form with variables x, y, and v, while matrix B
shows a specific example with real values. YOLO algorithm
uses visibility values where 0 represents hidden keypoints, 1
represents partially visible keypoints, and 2 represents fully
visible keypoints. We focus exclusively on the values 0 and
2, as the original dataset does not contain any keypoints la-
beled as partially visible.
In Figure 6, we can see example of a generated
photo along with the keypoints estimated by the pose
estimation model. The coordinates of these keypoints
are stored in matrices for subsequent analysis.
Figure 6: Keypoints obtained on a generated image using
the Pose Estimation model described in 5.1.
5.2 Action Recognition Models
We present two approaches in this section: one that
relies on keypoint detection to identify the performed
action and another that uses only raw image data for
action classification. Both methods are essential for
understanding the role of feature extraction in recog-
nizing actions. The following subsections will delve
into the implementation details and performance of
these models.
5.2.1 Action Recognition Model Using Keypoints
Our input data consists of matrices with keypoints
mentioned in 5.1, and the output data contains infor-
mation about the actions being performed, which are
assigned to the respective matrices. These data pairs
form the basis of our model and are used to train the
neural network with the goal of recognizing actions
based on the position of keypoints obtained from the
input images.
Compared to the model without keypoint usage,
we used approximately 75% of the data for train-
ing, as the model occasionally misidentified keypoints
during pose estimation, detecting two dogs in an im-
age where there was only one. We did not want to in-
clude such text files in the training process, as we are
focusing on action classification for a single dog. Af-
ter removing the wrong files, we evenly split the data
into training, testing, and validation sets in a ratio of
75 : 15 : 10. Our experiments showed that training the
model for 30 epochs was the most effective approach.
To address the issue, we propose an approach
where we first use YOLO for dog detection. This
step allows us to detect and isolate individual dogs in
an image, even when there are multiple dogs present.
Once detected, we crop the dogs from the original im-
age and send them to the model for pose estimation.
This way, we could ensure that only the relevant por-
tion of the image is processed by the pose estimation
model, reducing the risk of misidentification.
Figure 7: Model architecture: The input layer processes a
24 × 3 matrix representing the keypoints, where each row
corresponds to a keypoint’s coordinates and visibility.
Using tensorflow.keras.models, we implemented a
deep convolutional neural network model shown in
figure 7. The model contains three convolutional lay-
ers with 64, 32, and 16 filters, respectively, followed
by pooling layers, a Flatten layer, and Dense layers
with 16 and 4 neurons (the output layer). The total
number of parameters is 8,708.
5.2.2 Action Recognition Model not Using
Keypoints
For each action, we selected the top 1,000 images, or-
ganized them in a split-directory format required for
neural network training (Jocher, 2023), and divided
them randomly into training (700 images), validation
(150 images), and testing (150 images) sets with no
overlap. Then we used a pre-trained model yolov8n-
cls.pt (Jocher et al., 2023b), designed for classifica-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
588

tion into categories, and trained it on the synthetic
dataset for 30 epochs.
5.3 Evaluation
The model trained on synthetic data without the use
of keypoints was tested using a dataset consisting
of real photographs divided into four separate cate-
gories, each containing around 50 images.
Some examples of classification are shown in Fig-
ure 8. Figure 8a represents the true labels and Fig-
ure 8b represents the classification done by the model.
Certain errors identified in the model underscore the
complexities involved in recognizing canine actions
from images. Differentiating between a standing and
running dog can pose challenges even for humans,
given that photographs do not convey the temporal
progression of movement. The lack of dynamic con-
text requires the model to base its judgments solely on
a single static image, which can result in confusion
between visually similar poses. Additionally, when
legs or other body parts were obscured, the model ex-
hibited a tendency to make more significant mistakes.
This limited visibility can hinder the model’s ability
to accurately identify actions, as it does not possess all
the requisite information for precise decision-making.
The model using keypoints coordinates was the
most successful in predicting the category ”sit”, al-
though it incorrectly classified some instances as be-
longing to the category ”lay” or ”run”. The model
also performed well in identifying the category of
photographs from the ”run” class, with this category
most frequently misclassified as ”lay”. We show sev-
eral examples of these misclassifications in Figure 9.
The action recognition model that relies on key-
point coordinates is highly dependent on the pose es-
timation model. Inaccuracies in the training data for
the pose estimation model can lead to minor errors
that affect the learning and classification accuracy of
the action recognition model.
To compare both approaches, we calculated rel-
evant metrics for the models—accuracy, precision,
sensitivity, and F1 score. These metrics allowed us
to evaluate and compare the performance of the indi-
vidual approaches on real photographs. In Table 2,
we can see the calculated metrics for the two mod-
els. The model using keypoints coordinates achieved
higher values in all observed metrics. Although the
keypoint model achieves slightly better results, the
differences are not significant, and we cannot claim
that it is unequivocally superior.
Table 2: Comparison of two models: Model 2 incorporates
keypoint coordinates, while Model 1 does not. The differ-
ences between them are minor, and further statistical analy-
sis is needed to evaluate their significance.
Metric Model 1 Model 2
Accuracy 0.665 0.672
Precision 0.677 0.693
Recall 0.666 0.672
F1 Score 0.665 0.676
5.4 Integrating Real Photographs for
Enhanced Model Training
The action recognition models were initially trained
exclusively on synthetic data generated by deep learn-
ing models. However, synthetic data often lack the
complexity and diversity inherent in real-world im-
ages, which can exhibit various forms of noise and
artifacts, including motion blur, low lighting, and im-
ages taken from significant distances. These limita-
tions may impede the models’ ability to generalize
effectively to real-world scenarios, potentially reduc-
ing accuracy and reliability in applied settings. To ad-
dress this, we designed an experiment to integrate real
images into the training dataset. These real images
were sourced from the COCO dataset, selectively fil-
tered based on descriptive tags to match our target cat-
egories. This approach aims to evaluate whether aug-
menting the synthetic dataset with real-world images
can enhance the models’ capacity to adapt to real con-
ditions, despite synthetic data remaining the dominant
component in the training set.
Initially, the dataset for each action category con-
tained approximately 700 images or sets of keypoints.
To increase data variability, we added 100 additional
real photographs for the model without keypoint de-
tection and 100 corresponding keypoint files for the
keypoint-based model. These new data was placed in
the appropriate category folders, and the training pro-
cess was carried out using the same conditions and
parameters as in previous sessions.
The inclusion of real photographs in the training
dataset for the model that does not utilize keypoints
led to a significant improvement in its performance.
Table 3: Comparison of the performance of 2 models with-
out keypoint detection - before and after adding real data to
train set. Tested on real photographs.
Metric Before After
Accuracy 0.665 0.800
Precision 0.677 0.813
Recall 0.666 0.813
F1 Score 0.665 0.801
Canine Action Recognition: Exploring Keypoint and Non-Keypoint Approaches Enhanced by Synthetic Data
589
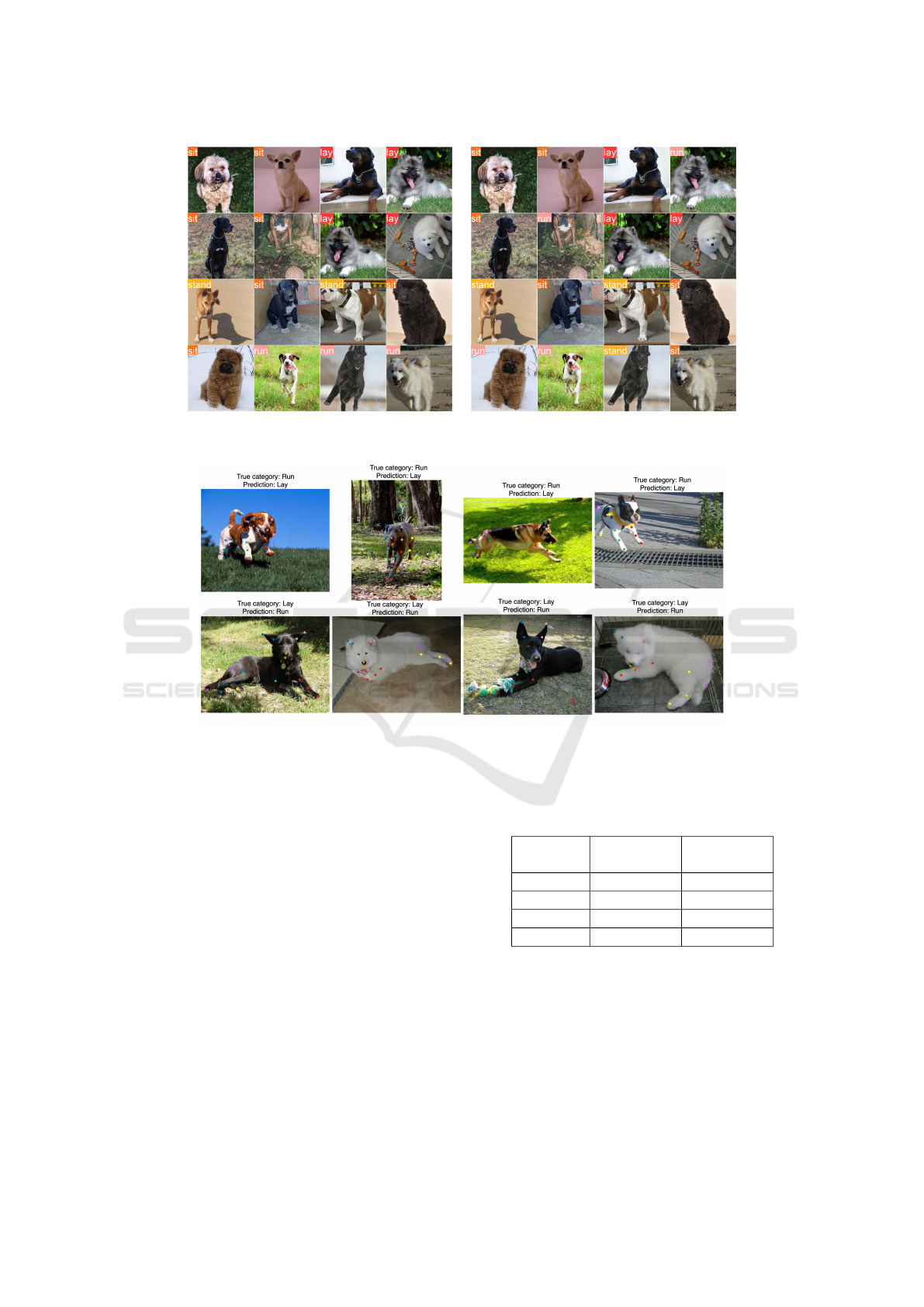
(a) Ground truth categories (b) Predicted categories
Figure 8: Comparison of actual and predicted categories by non-keypoint based model.
Figure 9: Examples of misclassification for lay and run by keypoint-based model. The model struggled to differentiate
between these two categories, likely due to occluded body parts and the absence of temporal sequence information.
In contrast, the keypoint-based model performed
better in some categories but got worse in others.
Adding real data while maintaining 30 epochs neg-
atively impacted performance. To address this, we in-
creased the number of epochs to 50, as keypoints from
real data can be more challenging to process due to
factors like occluded body parts. Extending the train-
ing period seems to have allowed the model to better
adapt to these real-world conditions, resulting in im-
proved accuracy and other metrics. The gains were
more modest than those observed in the non-keypoint
model.
To confirm that the improvement wasn’t solely
due to the increased number of epochs, Table 5
presents the validation results of a model trained only
on synthetic data and validated on real photos, first af-
ter 30 epochs and then after 50 epochs. The results in-
dicate a decline in performance, suggesting the model
may have overfitted after training on generated data
Table 4: Comparison of the performance of the model us-
ing skeleton detection before and after adding real data to
training set, tested on real data.
Metric
Before
(30 epochs)
After
(50 epochs)
Accuracy 0.672 0.721
Precision 0.693 0.722
Recall 0.672 0.721
F1 Score 0.676 0.720
for 50 epochs.
Nevertheless, the incorporation of real data im-
proved the model’s performance, indicating that fur-
ther increases in real data amount may continue to
enhance its accuracy and robustness. Additionally,
expanding the model’s exposure to diverse scenarios
is likely to improve its generalization capabilities in
practical applications.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
590

Table 5: Comparison of the performance of the model using
skeleton detection after 30 epochs and 50 epochs, trained
only with generated data and tested on real data.
Metric
30 epochs 50 epochs
Accuracy 0.672 0.602
Precision 0.693 0.635
Recall 0.672 0.6019
F1 Score 0.676 0.606
6 CONCLUSIONS
Action recognition in animals presents a complex
challenge due to the variability in movement and the
diverse environments in which animals operate. Cre-
ating a high-quality dataset for training deep learning
models involved several challenges, particularly due
to a lack of annotated data for this specific task. We,
therefore, investigated the use of existing datasets and
assessed their suitability for our needs, while an alter-
native approach was also used as we generated image
data with deep learning models.
Comparing the two approaches to action recog-
nition revealed that the model using keypoints per-
formed marginally better than the non-keypoint
model. However, after including real data in the train-
ing set, we found that the model without keypoint
detection achieved significantly better results on real
photos. This suggests that non-keypoint models have
strong potential in canine action recognition and may
adapt more readily to the variability and complexity
of real-world images. We believe that using generated
data to augment the training set, combined with real
photographs, can substantially aid in training models
that require large datasets.
ACKNOWLEDGEMENTS
This work was supported by the grant KEGA 004UK-
4/2024 “DICH: Digitalization of Cultural Heritage”.
REFERENCES
Biggs, B., Boyne, O., Charles, J., Fitzgibbon, A., and
Cipolla, R. (2020). Who left the dogs out?: 3D an-
imal reconstruction with expectation maximization in
the loop. In ECCV.
Dawn, K. (2023). Animal Pose Estimation: Fine-tuning
YOLOv8 Pose Models. https://learnopencv.com/
animal-pose-estimation/#Data-Configuration. Last
Access: 13.11.2023.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Department of Computer Science at Rice University
(2020). COCO Captions Explorer. https://vislang.ai/
coco-explorer. Last Access: 8.11.2024.
Fernandes, A. F. A., D
´
orea, J. R. R., and Rosa, G. J. d. M.
(2020). Image analysis and computer vision applica-
tions in animal sciences: an overview. Frontiers in
Veterinary Science, 7:551269.
getimg.ai (2024). Parameters. https://getimg.ai/guides/
stable-diffusion-parameters. Last Access: 31.3.2024.
Girish, D., Singh, V., and Ralescu, A. (2020). Understand-
ing action recognition in still images.
Jiang, L., Lee, C., Teotia, D., and Ostadabbas, S. (2022).
Animal pose estimation: A closer look at the state-
of-the-art, existing gaps and opportunities. Computer
Vision and Image Understanding, 222:103483.
Jocher, G. (2023). Image Classification Datasets Overview.
https://docs.ultralytics.com/datasets/classify/. Last
Access: 20.3.2024.
Jocher, G., Chaurasia, A., and Qiu, J. (2023a). Ultralytics
YOLOv8.
Jocher, G., Chaurasia, A., and Qiu, J. (2023b). Ultralytics
YOLOv8 - yolov8n-cls.pt.
Khosla, A., Jayadevaprakash, N., Yao, B., and Fei-Fei, L.
(2011). Novel Dataset for Fine-Grained Image Cate-
gorization. In First Workshop on Fine-Grained Visual
Categorization, IEEE Conference on Computer Vision
and Pattern Recognition, Colorado Springs, CO.
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Doll
´
ar, P. (2015). Microsoft COCO: Common Ob-
jects in Context.
LykosAI (2024). StabilityMatrix. https://github.com/
LykosAI/StabilityMatrix/tree/main.
Oppenlaender, J. (2022). A taxonomy of prompt modifiers
for text-to-image generation. arxiv. arXiv preprint
arXiv:2204.13988.
Realistic Vision (2024). Realistic Vision V6.0 B1. https:
//civitai.com/models/4201/realistic-vision-v60-b1.
Sun, Z., Ke, Q., Rahmani, H., Bennamoun, M., Wang, G.,
and Liu, J. (2022). Human action recognition from
various data modalities: A review. IEEE transac-
tions on pattern analysis and machine intelligence,
45(3):3200–3225.
Yang, Z., Zhou, M., Shan, M., Wen, B., Xuan, Z., Hill,
M., Bai, J., Qi, G.-J., and Wang, Y. (2024). Omn-
imotiongpt: Animal motion generation with limited
data. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
1249–1259.
Canine Action Recognition: Exploring Keypoint and Non-Keypoint Approaches Enhanced by Synthetic Data
591
