
Deep Image-Based Adaptive BRDF Measure
Wen Cao
a
Media and Information Technology, Department of Science and Technology, Link
¨
oping University,
SE-601 74 Norrk
¨
oping, Sweden
Keywords:
BRDF Measure, Adaptive, Deep Learning.
Abstract:
Efficient and accurate measurement of the bi-directional reflectance distribution function (BRDF) plays a
key role in realistic image rendering. However, obtaining the reflectance properties of a material is both
time-consuming and challenging. This paper presents a novel iterative method for minimizing the number
of samples required for high quality BRDF capture using a gonio-reflectometer setup. The method is a two-
step approach, where the first step takes an image of the physical material as input and uses a lightweight
neural network to estimate the parameters of an analytic BRDF model. The second step adaptive sample the
measurements using the estimated BRDF model and an image loss to maximize the BRDF representation
accuracy. This approach significantly accelerates the measurement process while maintaining a high level of
accuracy and fidelity in the BRDF representation.
1 INTRODUCTION
The bidirectional reflectance distribution function
(BRDF) (Nicodemus, 1965), is a fundamental con-
cept in computer graphics, representing the interac-
tion of light with a material. It is a four-dimensional
function that defines the relationship between incom-
ing and outgoing light directions at a material surface.
BRDFs can be represented either by analytic models
(Cook and Torrance, 1982; Phong, 1975) or by tab-
ulated measurements for every pair of incident and
outgoing angles (Matusik et al., 2003), with each ap-
proach having its own advantages and disadvantages.
The capture of real, physical BRDFs is an impor-
tant tool in many applications ranging from photo-
realistic image synthesis and predictive appearance
visualization —such as in additive manufacturing—to
enabling accurate sensor simulation and modeling of
scattering behaviors in industrial processes. However,
detailed BRDF measurement is a time-consuming
process because it typically requires dense mechan-
ical scanning of light sources and sensors across the
entire hemisphere. Several studies (Liu et al., 2023;
Dupuy and Jakob, 2018) have been conducted to re-
duce capture time by taking fewer measurements. Re-
cently, neural approaches (Zhang et al., 2021; Gao
et al., 2019) have been proposed to represent synthetic
BRDFs from images, primarily by estimating the an-
a
https://orcid.org/0000-0002-2507-7288
alytic BRDF parameters.
The objective of this paper is to accelerate BRDF
measurements using gonio-reflectometer setups, see
e.g. (Nielsen et al., 2015; Foo et al., 1997). To in-
corporate prior knowledge of the measured material,
our method uses a small neural network that takes an
image of the material as input to estimate the config-
uration of a small set of sampling directions to enable
efficient BRDF measurement. Specifically, we em-
ploy an encoder network to estimate the reflectance
parameters of analytic BRDF models from the input
image, which are used to adapt the BRDF measure-
ment directions. The method leverages both analytic
BRDF models and image-based neural decomposition
as priors. These two priors are essential for efficiently
utilizing small networks to estimate the adaptive sam-
ple distribution.
In summary, we present a novel solution for
BRDF measurement with the following key contribu-
tions:
• Lightweight. Our approach utilizes images
to learn priors, eliminating the need for com-
plex measurement procedures. This significantly
streamlines the measurement process and estab-
lishes an end-to-end pipeline.
• Adaptive and Accuracy. Experimental re-
sults demonstrate that our image-based adaptive
method effectively measure a wide range of ma-
terials. Its adaptability leads to highly accurate
292
Cao, W.
Deep Image-Based Adaptive BRDF Measure.
DOI: 10.5220/0013201000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 292-299
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

rendered results for each material,outperforming
previous methods at some aspects.
2 RELATED WORK
In this section, we review previous work related to
BRDF measurement and neural spatially varying bidi-
rectional reflectance distribution function-SVBRDF
capture.
BRDF Measurement: is commonly done using go-
nioreflectometers, which capture the reflectance of
realistic materials by controlling mechanical light
sources and camera motions (Foo et al., 1997).
For example, acquiring the MERL dataset re-
quires totaling approximately 1.46 million sam-
ples (Rusinkiewicz, 1998; Matusik et al., 2003). To
accelerate the acquisition, several methods and de-
vices have been developed. Nielsen et al. (Nielsen
et al., 2015) and Miandji et al. (Miandji et al., 2024)
used the measured BRDF Dataset to train a basis to
linearly reconstruct the full BRDF samples to accel-
erate the measurements. Dupuy et al. (Dupuy and
Jakob, 2018) used a laser machine to measure the
NDF values of materials to adaptive sample the hemi-
sphere domain. Liu et al. (Liu et al., 2023) used a
meta-learning method to optimize the sampling count
of different BRDF models.
Neural (SV)BRDF Capture. Researchers are
exploring deep learning methods to develop
lightweight approaches for measuring (SV)BRDF
values (Kavoosighafi et al., 2024; Gao et al., 2019).
Deschaintre (Deschaintre et al., 2019) used an
encoder-decoder network to estimate the normal,
diffuse albedo, and roughness images from phone-
captured images. Zhang (Zhang et al., 2021) used
images as input to predict BRDF values for each
pixel based on NeRF output. Zeng (Zeng et al., 2024)
used a diffusion framework to decompose RGB
images into normal, albedo, roughness, metallicity
and diffuse maps.
3 APPROACH
Our method employs a Convolutional Neural Net-
work (CNN) encoder to estimate the BRDF param-
eters of an analytic model from a single image. Based
on the estimated BRDF model, we utilize importance
sampling to derive an adaptive sampling pattern for
the input material. These sampling values are used to
render the estimated image by bilinear interpolation.
The renderd images with measured samples are fed
back to the sample selector, which calculates the im-
age loss and determines the optimal number of sam-
ples for the next iteration as illustrated in Figure 1.
3.1 BRDF Estimation
Drawing inspiration from deep learning techniques
used in SVBRDF capture (Deschaintre et al., 2019)
from images, we train a convolutional neural network
to encode isotropic material images into their corre-
sponding appearance parameters for a set of analyti-
cal models. The architecture of the BRDF estimation
network is illustrated in Figure 2 and employs sig-
moid activation functions for the parameter outputs.
3.1.1 Analytic BRDF
We use the Ward BRDF model (Walter, 2005)
parameterized by its diffuse reflection coefficient
ρ
d
,roughness α and specular reflection coefficient ρ
s
to train the network. The isotropic Ward BRDF
f
r
(i, o) with incoming direction i and outgoing di-
rectin o is:
f
r
(i, o) =
ρ
d
π
+
ρ
s
4πα
2
√
cosθ
i
cosθ
o
e
−
tan
2
θ
h
α
2
(1)
where θ
i
,θ
o
,θ
h
is the incoming angle, outgoing angle,
half angle.
To train the encoder network, we use the Loss
function of Ward BRDF model as below
L
loss
= ∥
ˆ
I −I∥
1
+ ∥(
ˆ
ρ
d
,
ˆ
α) −(ρ
d
, α)∥
1
(2)
where I represents the rendered image based on the
BRDF parameters. L1 loss is used for both images
and parameters.
3.1.2 Measured BRDF
We use the Measured BRDFs Dataset (MERL) (Ma-
tusik et al., 2003) for training and validation. We pre-
dict roughness, α, for each image by training from the
neural BRDF network from scratch.
f
r
(i, o) = f
′
ggx
(α) (3)
where f
′
ggx
is the microfacet BRDF model (Zhang
et al., 2021)representing the reflectance. We optimize
the network to minimize the loss between estimation
and ground truth of alpha value and images.
L
loss
= ∥
ˆ
I −I∥
1
+ ∥(
ˆ
α) −(α) ∥
2
(4)
The ground truth alpha values for each MERL
material are derived by fitting their respective total
BRDF data to the microfacet BRDF model. Based
on the BRDF parameters estimated by the network,
Deep Image-Based Adaptive BRDF Measure
293
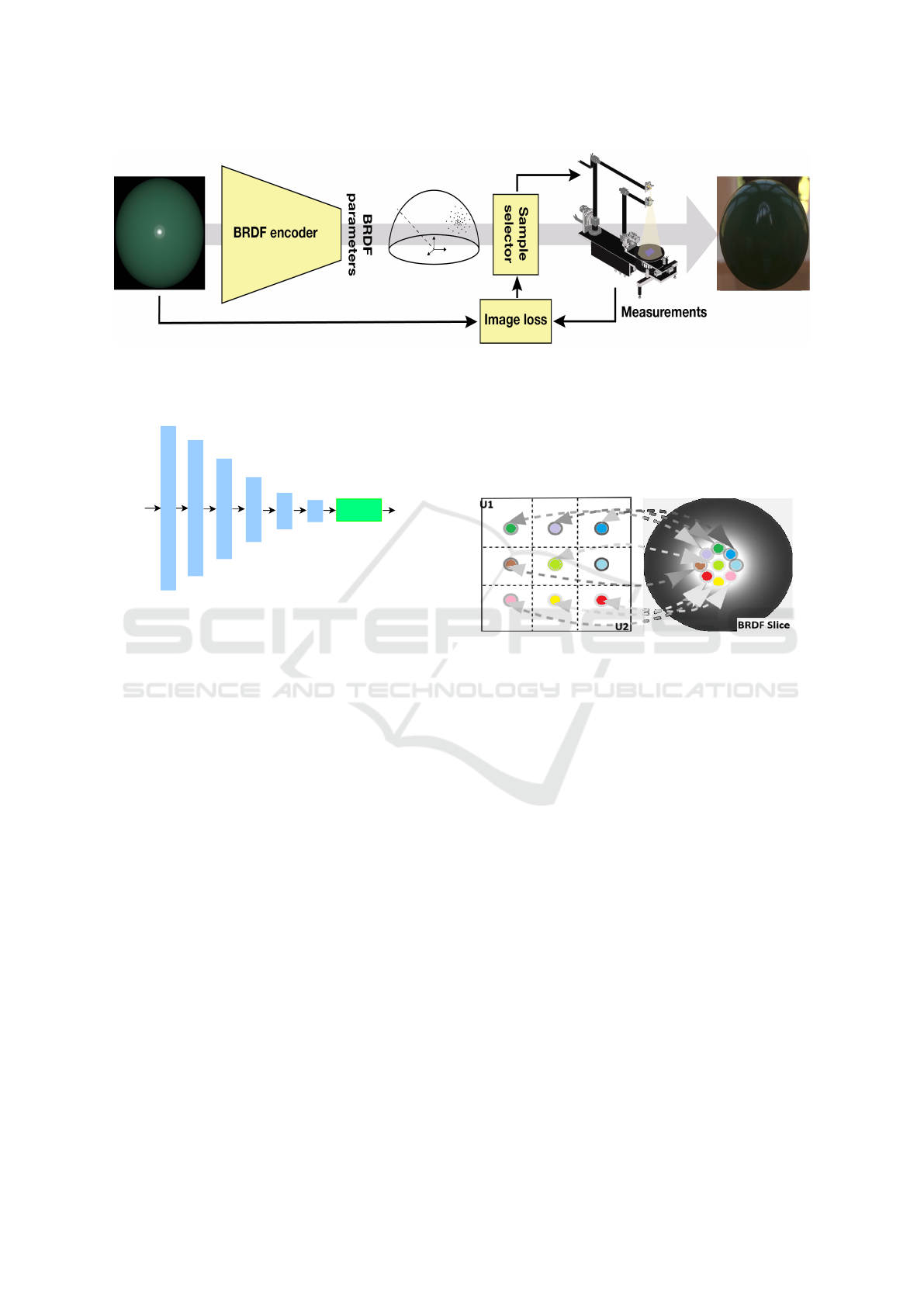
Figure 1: Method Flowchart of Deep Image-based Adaptive Reflectance Measure. For a fixed material, we use its image as
input to an encoder network, which then estimates the BRDF parameters for it. An adaptive sampler use these parameters to
determine the outgoing direction locations. Finally, we progressively increase the number of these locations to achieve the
minimum number of samples required while maintaining high fidelity.
256
Image
Input
128
16
32
64
8
FC
BRDF
Parameters
Figure 2: Illustration of the encoder network architecture
used for estimating BRDF parameters. Blue boxes denote
convolutional layers with batch normalization and ReLU
activation functions. The dimensions of these layers are the
numbers inside them. The green box represents a fully con-
nected layer outputting the BRDF parameters.
the estimated images
ˆ
I are rendered using the Micro-
facet BRDF model. We employed an L1 loss between
the predicted images
ˆ
I and the ground truth images
I,while an L2 loss was applied to the parameter esti-
mations.
3.2 Adaptive Reflectance Sampling
Using the BRDF estimation network, we are able to
derive the BRDF parameters from an input image. We
draw inspiration from previous work and utilize the
inverted BRDF importance sampling to drive an adap-
tive sampling distribution of the outgoing hemisphere
which is similar to the work of Dupuy et al. (Dupuy
and Jakob, 2018; Bai et al., 2023). This adaptive
sampling strategy effectively minimizes measurement
time by targeting only those directions specified by
the input BRDF material pattern. For instance, in
the case of a mirror-like material, sampling is con-
centrated on the delta regions directly opposite the in-
coming light direction. In contrast, for diffuse ma-
terials, a uniform sampling pattern is implemented
throughout the hemisphere. In practice, the BRDF
sampling pattern for most materials typically falls be-
tween these two extremes. For details on importance
sampling, we refer to Bai et al. (Bai et al., 2023).
Figure 3: A visualization of the process g in Eq. 5 to cal-
culate the adaptive sampler’s position. We start by get-
ting sample points (u
1
, u
2
) on a uniform grid in the unit
square [0, 1]
2
. The importance sampling process takes a
sample point (u
1
, u
2
), and maps it to position on a 2D BRDF
slice,and reverse wise works by its inverse function.
The rendering equation of general BRDF model is
as follows:
I(i) =
Z
U
2
f
r
(i, g(u)) L
i
(g(u))
∥
J
g
(u)
∥
du (5)
where L
i
is the incident radiance, I
i
denotes the radi-
ance reflected in all directions at pixel point i, J
g
is the
Jacobian of g.
p(ω
o
) = w
d
·p
d
(ω
o
) + w
S
·p
s
(ω
o
)
(6)
where w
d
+ w
s
= 1, p(ω
o
) is the PDF of outgoing di-
rection ω
o
. The diffuse PDF p
d
is a simple cosine-
weighted distribution and PDF p
s
is the specular dis-
tribution based on BRDF specular lobe.The equation
g defines the adaptive sampling strategy in the out-
going hemisphere domain according to the specular
distribution p
d
without the diffuse distribution as Fig-
ure 3 and its inverse g
−1
map the location of BRDF
slice back to the unit square which is used in bilinear
interpolation to fully evaluate the BRDF values in the
rendering function to produce the image.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
294
Thus, we focus on samplers suitable for represent-
ing f
r
: an invertible function g from random variates
u ∈ [0, 1]
2
into outgoing directions ω
o
and its asso-
ciated probability density function (PDF) p(ω
o
, ω
i
).
The shape of p should closely matches f
r
to achieve
low variance.
3.2.1 Importance Sampling
The importance sampling equation for the Ward
BRDF model used in this work is:
θ
h
= arctan(α
p
−log u
1
)
φ
h
= 2πu
2
(7)
where φ
h
, θ
h
is the half angle; u
1
, u
2
is the uniform
variates on [0, 1]
2
(Walter, 2005). We compute the
inverse of Equation 7 to evaluate the measured BRDF
parameters in the rendering equation using:
u
1
= e
−
tan
2
θ
h
α
2
u
2
=
φ
h
2π
(8)
Then, we use ω
o
= 2(ω
h
·ω
i
)ω
h
−ω
i
to determines
the outgoing direction ω
o
(φ
h
, θ
h
).
For the MERL dataset, there is no analytical
function for obtaining the PDF. Therefore, we ap-
proximate the PDF using the microfacet BRDF
model (Dupuy, 2015) and employ its importance sam-
pling method to achieve adaptive measurements. Ad-
ditionally, we utilize the inverse of this function in the
rendering process. Detailed functions and methodolo-
gies can be found in Dupuy’s Ph.D. thesis (Dupuy,
2015)
Based on the importance sampling procedures ex-
plained above, we adaptively sample the outgoing di-
rection according to the PDF and subsequently use
the direction to make a new measurement of the ma-
terial BRDF. Thus, previous measurements guide the
goniometer and facilitate precise and efficient mea-
surement of the input material with reduced capture
time. The incoming directions are uniformly sampled
within the cosine-weighted hemisphere.
4 IMPLEMENTATION
We use Mitsuba 3.0 (Jakob et al., 2022) and its Python
bindings to render images of size 256 ×256 and Py-
Torch to implement the neural network.
4.1 Dataset
To train the neural network of the Ward BRDF model,
we create a dataset covering the full range of Ward
BRDF parameter-α.Images with varying roughness
and diffuse values were rendered using the Ward
BRDF function, a single point light source, and a
sphere in Mitsuba. The dataset consists of 4,000 train-
ing images and 100 test images.
Similarly, for the MERL dataset, we fit each ma-
terial to the Microfacet BRDF model. We first cre-
ate datasets by rendering images with varying alpha
and albedo values using the Microfacet BRDF model.
These images are used to pretrain the BRDF estima-
tion network, addressing the limited amount of mea-
sured data in the MERL dataset. We then fine-tune the
BRDF estimation network using the MERL training
images, with the fitted alpha values serving as ground
truth. The Microfacet dataset comprises 40,000 train-
ing images and 100 test images, while the MERL
dataset includes 85 training images and 15 test images
rendered with different materials.
4.2 Estimation
The BRDF estimation network are depicted in Fig-
ure 2 . We train the network in Nivida Geforce RTX
4080 with 15GB memory.
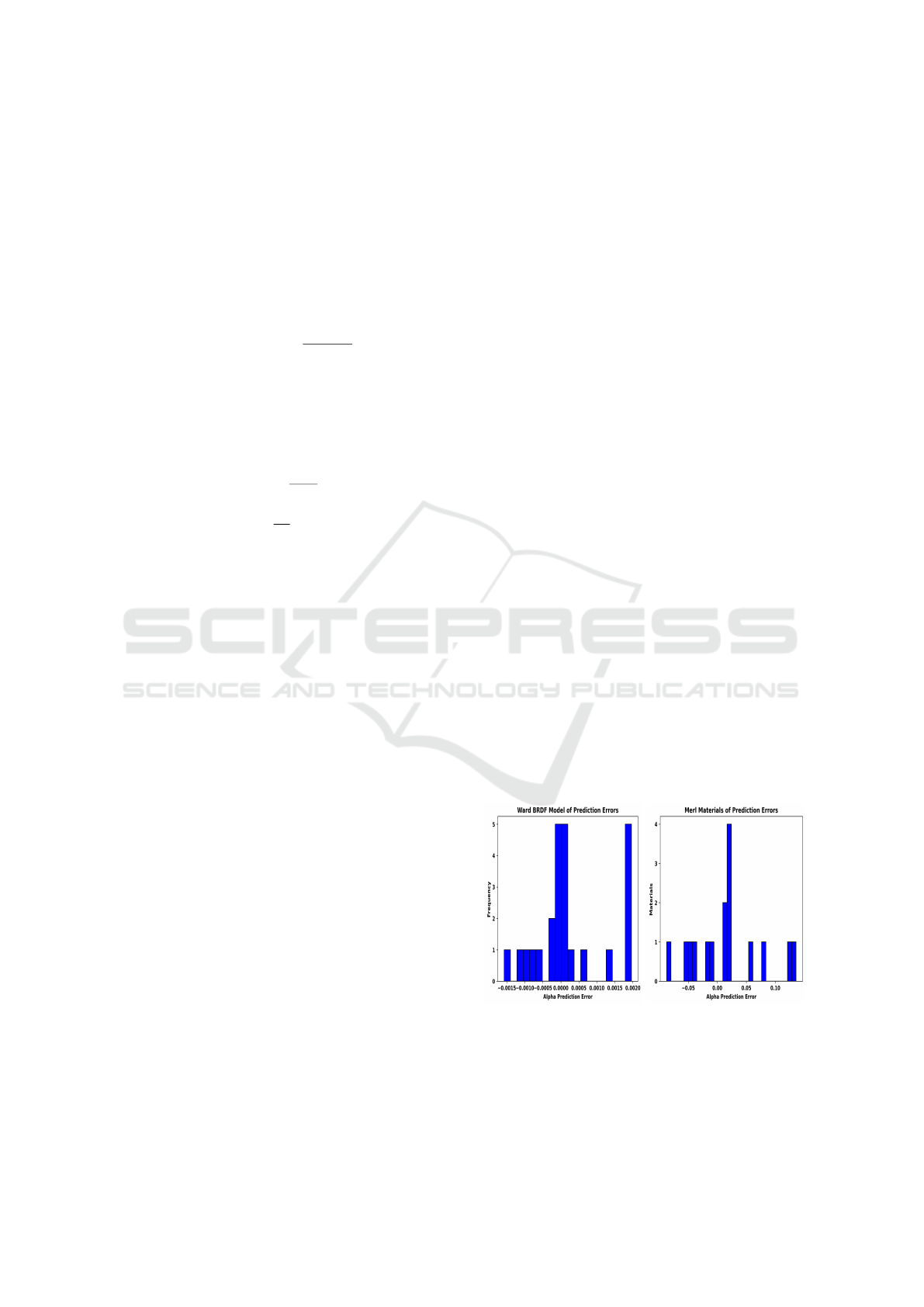
We demonstrate that our BRDF estimation net-
work accurately predicts BRDF parameters for both
the Ward model and the MERL dataset, as illustrated
in Figure 4. For the Ward BRDF model, the net-
work achieves nearly perfect predictions with errors
between -0.0015 and 0.0020. For the 15 materials
in the MERL test set, the estimation errors range be-
tween –0.1 and 0.1. In most BRDF models, albedo
represents the base color, while alpha describes the
shape of the BRDF reflection lobe. Since the base
color is visually evident in our results, we primarily
present the network’s alpha estimations in Figure 4.
Figure 4: Error distributions for BRDF parameters estima-
tion. It can be seen that the error varies in a small range.
Deep Image-Based Adaptive BRDF Measure
295

4.3 Sample Count
We treat the number of outgoing directions as hyper-
parameters of the entire pipeline. For each material,
we optimize the number of samples by the image loss
between the rendered images by the measurements
and the ground truth.
However we observe that the performance plots
based on sample number vary across different materi-
als, as shown in Figure 5. Generally, materials with
higher specular reflections require more samples. To
minimize the size of the measurements, we set the
maximum direction count to 32 ×32, as increasing
the number of samples beyond this point yields visu-
ally negligible improvements for most materials.
For the number of incident directions, we use one
φ point and eight θ points sampled from a uniform
cosine distribution, adhering to the rotational sym-
metry of isotropic materials. The number of direc-
tions was determined based on the work by Dupuy
and Jakob (Dupuy and Jakob, 2018).
5 RESULTS
In this section, we present the qualitative results and
comparisons with state-of-the-art methods for BRDF
acquisition. For quantitative evaluations, we em-
ploy metrics as Peak Signal-to-Noise Ratio (PSNR),
Root Mean Square Error (RMSE), and mean
F
LIP
error (Andersson et al., 2020). Additionally, we use
F
LIP error maps to visualize the errors in the rendered
images.
5.1 Comparison
Here, we compare our method with the state of the
art method meta-learning brdf sampling method (Liu
et al., 2023). Since Liu’s method learns sample pat-
terns for all materials, its performance does not im-
prove with increased sample counts once highlights
are achieved. Additionally, it requires the implemen-
tation of a fixed sample count. In contrast, we derive
adaptive sampling pattern for each specific input ma-
terial, allowing the performance to progressively in-
crease as more samples are added.
We show the comparison between our method and
Liu’s method in Table 1, using the nine test materials
from our test datasets derived from the MERL dataset.
For quantitative comparison, we select results from
Liu’s method and our results with same sample num-
bers.
Specifically, Liu’s method uses from 32 to
512 samples within the Rusinkiewicz parameteriza-
tion (Rusinkiewicz, 1998), while our approach adopts
a configuration of 1 ×8 incoming directions(θ
in
, φ
in
)
and from 2×2 to 8 ×8 outgoing directions(θ
out
, φ
out
)
in spherical coordinates.
Our method consistently produces high-fidelity
rendered images across all tests, particularly with an
relative high number of samples. In contrast, Liu’s
method performs well with fewer samples, but its ac-
curacy declines as the sample count grows. For dif-
fuse and specular materials, our approach performs
comparable with Liu’s, as demonstrated by the results
in Table 1.
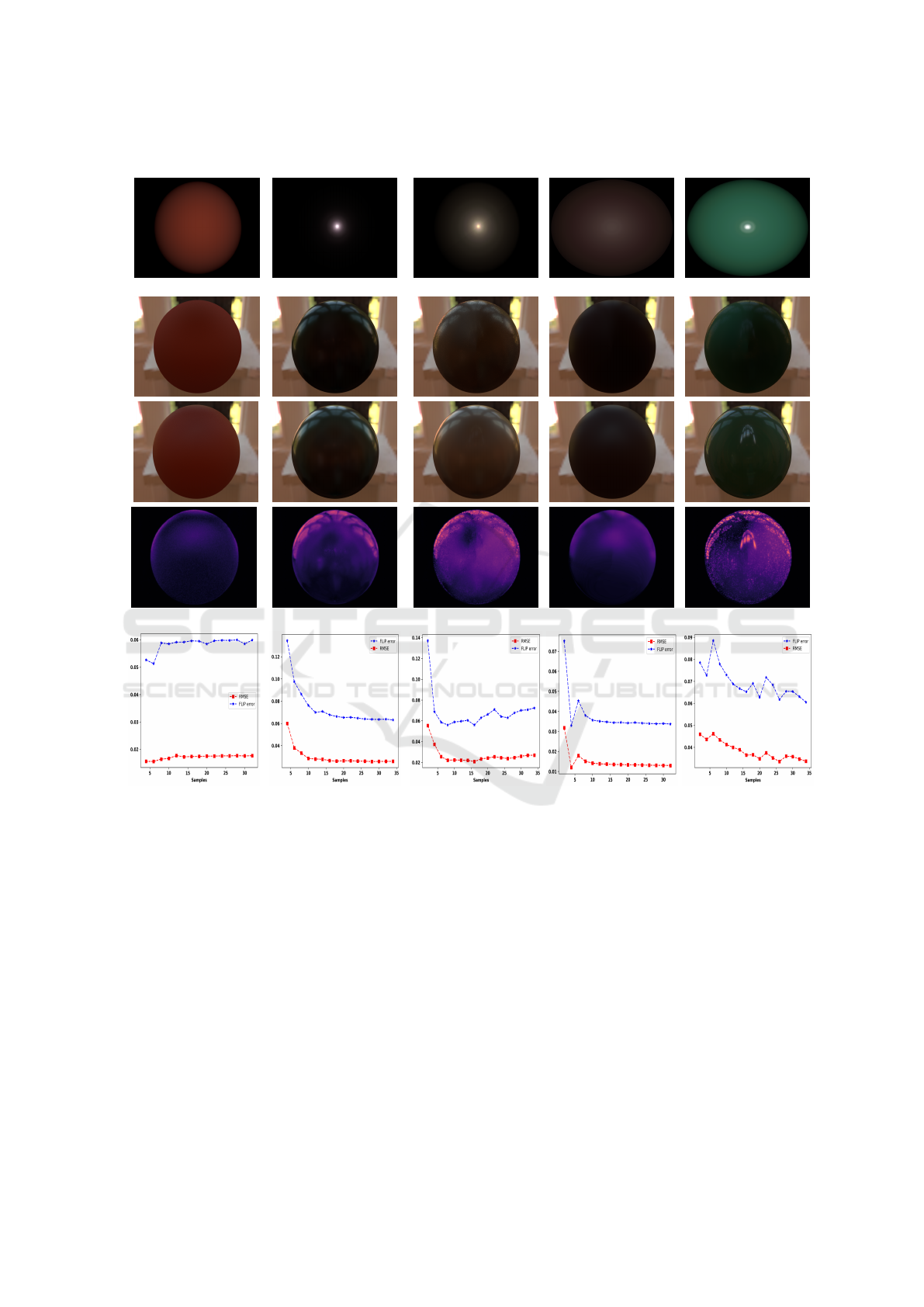
5.2 Evaluation on Different Materials
We show more visual results in Figure 5 with five
different materials. We observe that diffuse materi-
als achieve high-quality results with fewer samples,
whereas highly specular materials require a larger
number of samples to produce good outcomes. The
first row and second row are the rendered images us-
ing our adaptive measurement method under point
lighting and environment lighting, respectively. The
fourth rows of Figure 5 shows the
F
LIP Error im-
age comparing the second row (rendered images from
our method) with the third row (ground truth), where
specular materials generally exhibit higher errors.The
last row presents the plot of the performance metrics
based on sample numbers, illustrating how the sam-
ple count is selected for each material as described in
subsection 4.3.
6 DISCUSSION
Moreover, additional variants in sample methods and
BSDF models could be further explored within this
approach.
Sample Method. Normalizing Flows (M
¨
uller et al.,
2019) is a possible alternative to our adaptive sam-
pler, as it supports both inverse and forward sampling
and can be co-optimized with the entire pipeline. In-
vestigating the integration of Normalizing Flows into
our sampling strategy could be a valuable direction
for future research, offering potential improvements
in efficiency and versatility.
BSDF Model. We evaluated both the Ward BRDF
model and the Microfacet BRDF model, and our find-
ings indicate that both models perform effectively
within our method. However, our current work is lim-
ited to isotropic materials.
In future research, we aim to extend our approach
to incorporate more complex BSDF models, such as
layered BRDFs, subsurface scattering materials, and
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
296
Table 1: Comparing, Liu’s method (Liu et al., 2023),and our Adaptive sampler using all test Materials. The proposed
method is in blue and best values are in bold. Note samples of Liu’s method is in Rusinkiewicz parameterization((φ
d
, θ
h
, θ
d
))
(Rusinkiewicz, 1998), while our sample’s location is in spherical coordinates((θ
in
, φ
in
, θ
out
, φ
out
)).
Test Method Liu (Liu et al., 2023) Method
Image-
based
Adaptive
Materials Samples Count RMSE PSNR Samples Number RMSE PSNR
Alum-bronze 32 0.00154 36.26 1 ×8 ×2 ×2 0.055 25.1
128 0.00142 36.97 1 ×8 ×4 ×4 0.037 28.53
512 0.016 35.86 1 ×8 ×8 ×8 0.02 33.84
Dark-red-paint 32 0.0167 35.44 1 ×8 ×2 ×2 0.026 31.8
128 0.0239 32.43 1 ×8 ×4 ×4 0.0156 36.13
512 0.026 31.68 1 ×8 ×8 ×8 0.016 35.68
Color-changing-paint3 32 0.044 27.23 1 ×8 ×2 ×2 0.049 26.18
128 0.0335 29.5 1 ×8 ×4 ×4 0.06 24.43
512 0.0249 32.1 1 ×8 ×8 ×8 0.033 29.54
Dark-specular-fabric 32 0.026 31.56 1 ×8 ×2 ×2 0.032 29.95
128 0.034 29.44 1 ×8 ×4 ×4 0.012 38.43
512 0.033 29.7 1 ×8 ×8 ×8 0.015 36.45
Green-acrylic 32 0.03 30.5 1 ×8 ×2 ×2 0.046 26.76
128 0.07 23.1 1 ×8 ×4 ×4 0.044 27.21
512 0.05 26 1×8 ×8 ×8 0.043 27.26
Pink-fabric 32 0.02 33.94 1 ×8 ×2 ×2 0.04 27.853
128 0.02 33.92 1 ×8 ×4 ×4 0.025 32.16
512 0.026 31.53 1 ×8 ×8 ×8 0.0234 32.62
Red-fabric2 32 0.025 32.1 1 ×8 ×2 ×2 0.024 32.49
128 0.032 30 1×8 ×4 ×4 0.01 39.72
512 0.035 29.2 1 ×8 ×8 ×8 0.0098 40.17
Green-metallic-paint 32 0.067 23.42 1 ×8 ×2 ×2 0.056 25
128 0.028 31.13 1 ×8 ×4 ×4 0.0246 32.17
512 0.0271 31.32 1 ×8 ×8 ×8 0.02 33.94
White-diffuse-bball 32 0.04 28.47 1 ×8 ×2 ×2 0.0221 30.36
128 0.038 28.3 1 ×8 ×4 ×4 0.031 30.22
512 0.022 32.98 1 ×8 ×8 ×8 0.029 30.65
Specular-orange-phenolic 32 0.039 28.2 1 ×8 ×2 ×2 0.077 22.3
128 0.062 24.1 1 ×8 ×4 ×4 0.053 25.57
512 0.0462 26.71 1 ×8 ×8 ×8 0.0345 29.2
Red-metallic-paint 32 0.04 28 1×8 ×2 ×2 0.081 21.86
128 0.05 26.2 1 ×8 ×4 ×4 0.058 24.7
512 0.04 27.5 1 ×8 ×8 ×8 0.0294 30.6
Pink-plastic 32 0.013 37.92 1 ×8 ×2 ×2 0.078 23.25
128 0.02 33.99 1 ×8 ×4 ×4 0.048 26.42
512 0.019 34.58 1 ×8 ×8 ×8 0.019 34.56
PVC 32 0.038 28.44 1 ×8 ×2 ×2 0.064 23.83
128 0.03 30 1×8 ×4 ×4 0.046 26.71
512 0.031 30.2 1 ×8 ×8 ×8 0.023 32.8
Light-red-paint 32 0.018 34.85 1 ×8 ×2 ×2 0.082 21.76
128 0.029 30.82 1 ×8 ×4 ×4 0.042 27.52
512 0.0283 31 1 ×8 ×8 ×8 0.025 31.94
Maroon-plastic 32 0.033 29.65 1 ×8 ×2 ×2 0.068 23.25
128 0.063 24.1 1 ×8 ×4 ×4 0.054 25.3
512 0.04 27.4 1 ×8 ×8 ×8 0.03 30.4
Deep Image-Based Adaptive BRDF Measure
297
Dark-red-paint Color-changing-paint3 Alum-bronze Dark-specular-fabric Green-acrylic
Single Point LightEnvironment Light
Ground Truth
F
LIP Error
8 ×8 16 ×16 16 ×16 14 ×14 32 ×32
Performance Plot
Figure 5: Rendered sphere of Five Different Materials from the MERL Dataset.The first row shows our measurements ren-
dered under single-point lighting. The second row shows our measurements rendered under environmental lighting. The third
row shows the ground truth rendered under the same environmental lighting conditions. The fourth row shows the
F
LIP error
images between the second and third rows. The final row presents a plot of error metric values versus the number of samples
for each material. The Y-axis of final row represents the RMSE and
F
LIP error values, while the X-axis indicates the sample
counts, ranging from 2 ×2 to 32 ×32 of outgoing directions.
anisotropic materials. We believe the adaptive capa-
bilities of our method could be further leveraged to
handle these complicated material representations ef-
fectively.
7 CONCLUSION
We propose an image-based adaptive BRDF sam-
pling method that significantly reduces BRDF mea-
surement time while maintaining high accuracy and
fidelity. We use a lightweight neural network and
show that it can accurately estimate BRDF parameters
and that this, in turn, can be used to importance sam-
pling new directions for taking measurements. We
validate our approach using both the MERL dataset
and the Ward BRDF model. Additionally, we com-
pare our method against the state-of-the-art method
by Liu et al (Liu et al., 2023).
Our method demonstrates some improved perfor-
mance in some aspects. By adaptively sampling each
material independently, without relying on references
from other materials, our technique ensures that addi-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
298

tional measured samples directly contribute to a more
accurate BRDF representation. This characteristic
distinguishes our method from previous approaches
and results in a more robust representation. Conse-
quently, our approach exhibits enhanced reliability.
ACKNOWLEDGEMENTS
This project has received funding from the European
Union’s Hori- zon 2020 research and innovation pro-
gram under Marie Skłodowska- Curie grant agree-
ment No956585. We thank the anonymous reviewers
for their feedback.
REFERENCES
Andersson, P., Nilsson, J., Akenine-M
¨
oller, T., Oskarsson,
M.,
˚
Astr
¨
om, K., and Fairchild, M. D. (2020).
F
LIP:
A Difference Evaluator for Alternating Images. Pro-
ceedings of the ACM on Computer Graphics and In-
teractive Techniques, 3(2):15:1–15:23.
Bai, Y., Wu, S., Zeng, Z., Wang, B., and Yan, L.-Q. (2023).
Bsdf importance baking: A lightweight neural solu-
tion to importance sampling general parametric bsdfs.
Cook, R. L. and Torrance, K. E. (1982). A reflectance model
for computer graphics. ACM Transactions on Graph-
ics (ToG), 1(1):7–24.
Deschaintre, V., Aittala, M., Durand, F., Drettakis, G., and
Bousseau, A. (2019). Flexible svbrdf capture with a
multi-image deep network.
Dupuy, J. (2015). Photorealistic Surface Rendering with
Microfacet Theory. PhD thesis.
Dupuy, J. and Jakob, W. (2018). An adaptive parameteri-
zation for efficient material acquisition and rendering.
ACM Transactions on Graphics, 37(6):1–14.
Foo, S. C. et al. (1997). A gonioreflectometer for measur-
ing the bidirectional reflectance of material for use in
illumination computation. PhD thesis, Citeseer.
Gao, D., Li, X., Dong, Y., Peers, P., Xu, K., and Tong,
X. (2019). Deep inverse rendering for high-resolution
SVBRDF estimation from an arbitrary number of im-
ages. ACM Transactions on Graphics, 38(4):1–15.
Jakob, W., Speierer, S., Roussel, N., Nimier-David, M.,
Vicini, D., Zeltner, T., Nicolet, B., Crespo, M.,
Leroy, V., and Zhang, Z. (2022). Mitsuba 3 renderer.
https://mitsuba-renderer.org.
Kavoosighafi, B., Hajisharif, S., Miandji, E., Baravdish, G.,
Cao, W., and Unger, J. (2024). Deep svbrdf acqui-
sition and modelling: A survey. Computer Graphics
Forum, 43.
Liu, C., Fischer, M., and Ritschel, T. (2023). Learning to
learn and sample brdfs. Computer Graphics Forum
(Proceedings of Eurographics), 42(2):201–211.
Matusik, W., Pfister, H., Brand, M., and McMillan, L.
(2003). A data-driven reflectance model. ACM Trans.
Graph., 22(3):759–769.
Miandji, E., Tongbuasirilai, T., Hajisharif, S., Kavoosighafi,
B., and Unger, J. (2024). Frost-brdf: A fast and robust
optimal sampling technique for brdf acquisition. IEEE
transactions on visualization and computer graphics,
PP.
M
¨
uller, T., Mcwilliams, B., Rousselle, F., Gross, M., and
Nov
´
ak, J. (2019). Neural Importance Sampling. ACM
Transactions on Graphics, 38(5):1–19.
Nicodemus, F. E. (1965). Directional reflectance and emis-
sivity of an opaque surface. Applied optics, 4(7):767–
775.
Nielsen, J. B., Jensen, H. W., and Ramamoorthi, R. (2015).
On optimal, minimal BRDF sampling for reflectance
acquisition. ACM Transactions on Graphics, 34(6):1–
11.
Phong, B. T. (1975). Illumination for computer generated
pictures. Commun. ACM, 18(6):311–317.
Rusinkiewicz, S. M. (1998). A new change of variables
for efficient brdf representation. In Rendering Tech-
niques’ 98: Proceedings of the Eurographics Work-
shop in Vienna, Austria, June 29—July 1, 1998 9,
pages 11–22. Springer.
Walter, B. (2005). Notes on the ward brdf.
https://www.graphics.cornell.edu/ bjw/wardnotes.pdf.
Zeng, Z., Deschaintre, V., Georgiev, I., Hold-Geoffroy,
Y., Hu, Y., Luan, F., Yan, L.-Q., and Ha
ˇ
san, M.
(2024). Rgb↔x: Image decomposition and synthesis
using material- and lighting-aware diffusion models.
In ACM SIGGRAPH 2024 Conference Papers, SIG-
GRAPH ’24, New York, NY, USA. Association for
Computing Machinery.
Zhang, X., Srinivasan, P. P., Deng, B., Debevec, P., Free-
man, W. T., and Barron, J. T. (2021). NeRFactor: neu-
ral factorization of shape and reflectance under an un-
known illumination. ACM Transactions on Graphics,
40(6):1–18.
Deep Image-Based Adaptive BRDF Measure
299
