
Adaptive Traffic Management for Emergency Vehicles in Work Zones
Fatemeh Bandarian
1 a
, Saeedeh Ghanadbashi
1 b
, Abdollah Malekjafarian
1 c
and
Fatemeh Golpayegani
2 d
1
Structural Dynamics and Assessment Laboratory, School of Civil Engineering, University College Dublin, Dublin, Ireland
2
School of Computer Science, University College Dublin, Dublin, Ireland
Keywords:
Work Zone Management, Connected Automated Vehicle (CAV), Intelligent Transportation System (ITS),
Adaptive System Control.
Abstract:
A work zone is a section of road with closed lanes for maintenance, forcing vehicles to merge and creating
congestion bottlenecks on the highway. Emergency Vehicles (EVs) are vital for incident response, with re-
sponse times closely tied to fatality rates. EVs often face challenges when navigating work zones, and despite
their importance, little attention has been given to improving their movement through these areas, highlighting
the need for a system that enables quicker EV passage in work zones. While traffic management strategies are
implemented in work zones, their effectiveness for EVs remains unexplored. This leaves a gap in understand-
ing work zone management for EVs, ensuring their fast and safe passage. This paper proposes the ADAPtive
Emergency MERGing (ADAPT-EMERG) algorithm to address this gap. This algorithm controls vehicles
longitudinally for smooth merging into the open lane. It integrates merging approaches, headway adjustment
between vehicles, and Variable Speed Limit (VSL) rules to set speed limits. Simulation results show that the
ADAPT-EMERG algorithm reduces average travel times by 40%, minimises time loss for EVs by an average
of 5%, and achieves a throughput increase across various traffic scenarios compared to the state-of-the-art
strategies.
1 INTRODUCTION
A work zone is a section of roadway where cer-
tain lanes are closed for maintenance or construction
(Meng and Weng, 2013). This reduction in capac-
ity forces vehicles of both lanes to merge into a sin-
gle open lane abruptly (Algomaiah and Li, 2022).
This results in traffic congestion and a higher risk
of crashes, especially rear-end and angle collisions
caused by stop-and-go conditions and unsafe merg-
ing. Consequently, work zone safety and mobility
have been researched extensively. The most well-
known approaches for managing work zone merg-
ing are the LM and EM techniques. EM is the pri-
mary merging behavior in work zones, where drivers
quickly move into the open lane when they notice
a lane closure (Dixon et al., 1996), while the LM
strategy encourages drivers to use all available lanes
a
https://orcid.org/0000-0002-1121-7972
b
https://orcid.org/0000-0003-0983-301X
c
https://orcid.org/0000-0003-1358-1943
d
https://orcid.org/0000-0002-3712-6550
until they reach the merging point (Ramadan and
Sisiopiku, 2018). Some studies have indicated that
EM strategies perform better under uncongested traf-
fic conditions (Kurker et al., 2014), while LM strate-
gies are more effective in moderate to heavy traf-
fic. However, other researchers have reported dif-
ferent results (Ramadan and Sisiopiku, 2016). The
newly proposed New England Merge (NEM) strategy
was developed to address the limitations of both the
LM and EM strategies. NEM focuses on merging
in work zones by controlling the longitudinal move-
ment of vehicles, adjusting the gaps between them,
and regulating their speed for smoother traffic flow
(Ren et al., 2020b). Since the advent of Vehicle-
to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I)
communication, using Connected Automated Vehi-
cles (CAVs) for merging applications has garnered
significant interest (Golpayegani et al., 2021). A few
recent studies have examined cooperative merging in
work zones using V2I and V2V technologies to eval-
uate different merging strategies (Ren et al., 2020a;
Cao et al., 2021; Algomaiah and Li, 2021). Enhanced
366
Bandarian, F., Ghanadbashi, S., Malekjafarian, A. and Golpayegani, F.
Adaptive Traffic Management for Emergency Vehicles in Work Zones.
DOI: 10.5220/0013209000003941
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 366-373
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

cooperation in implementing the LM strategy can
be achieved through information exchange between
Connected Vehicles (CV) using Advanced Driver As-
sistance Systems (ADAS) and between CAVs through
a control unit. Both CVs and CAVs utilize V2V, I2V,
and V2I communication through Dedicated Short-
Range Communication (DSRC) technology (Abboud
et al., 2016). Previous research primarily concen-
trated on using CV to improve compliance rates
(Ghanadbashi et al., 2024a), but did not fully address
merging strategies or changes in gap acceptance and
cooperation, which are key benefits of CV technology
(Algomaiah and Li, 2022; Liu et al., 2017).
Merging in the work zone creates significant traf-
fic safety issues, highlighting the urgent need to re-
duce the impact of accidents through effective mea-
sures, such as reducing accident response time. Rapid
medical attention within the “golden hour” is cru-
cial for the best recovery outcomes (Stewart, 1990).
Emergency Vehicles (EVs), including fire trucks and
ambulances, are essential to Emergency Medical Ser-
vices (EMS) systems, transporting vital equipment
and personnel to the accident sites for first aid. Min-
imizing response time for EVs is crucial, yet they
often face obstacles from other vehicles on regular
roadways and highways, causing delays. The un-
predictability of traffic flow on highways exacerbates
these issues, and despite its importance, this chal-
lenge is not yet adequately addressed (Ghanadbashi
and Golpayegani, 2022; Ghanadbashi et al., 2024b;
Wu et al., 2020; Mikolasek et al., 2024). Dynamic
environments require adaptive approaches to align op-
erational rules with evolving objectives (Riad et al.,
2022; Guo et al., 2023). NEM strategy is proposed
to enhance work zone traffic management using CAV
features. Unlike EM and LM controls, NEM is de-
signed to accommodate different traffic demand con-
ditions without frequent adjustments based on traffic
flow variations and takes advantage of CAV technol-
ogy to enhance work zone traffic management (Kang
et al., 2006). However, this approach does not ac-
count for the distinct characteristics of different vehi-
cle types, including their varying sizes, speeds, and
priorities. This limitation is particularly concerning
given the critical nature of EVs’ tasks. EVs require
fast and unobstructed passage through traffic to re-
spond to emergencies as quickly as possible. The cur-
rent methods for managing merging in work zones do
not provide the necessary accommodations or priori-
tization for these vehicles, potentially delaying their
arrival at critical destinations and compromising the
efficiency of emergency services. Therefore, there is
a significant need for a more comprehensive approach
that addresses the specific requirements of EVs to en-
sure they can reach their destinations promptly and
perform their crucial functions without delay. One
of the main challenges is the lack of communication
and centralized control among drivers, which makes
self-organization difficult. Hence, using CAVs, an ef-
ficient control algorithm for clearing lanes for EVs is
required.
This paper focuses on the issue of addressing
the particular needs of EVs for delivering emergency
services, passing through a work zone on a high-
way while maintaining the overall network’s effi-
ciency. In this paper, we propose the ADAPtive
Emergency MERGing (ADAPT-EMERG) algorithm,
a rule-based method designed to optimize vehicle be-
havior in real-time to enhance the efficiency of EVs.
The proposed algorithm aims to improve the effi-
ciency and safety of lane merging operations in work
zones by leveraging the advanced communication and
automation capabilities of CAVs. This algorithm reg-
ulates gap acceptance, speed adjustments, and lane
changes for regular vehicles based on real-time infor-
mation from the environment. By guiding normal ve-
hicles to adjust their speed and positioning, ADAPT-
EMERG not only ensures a clear and efficient path
for EVs to pass through work zones without unnec-
essary delays but also maintains the overall efficiency
of the system and minimizes disruptions for other ve-
hicles. This balance ensures that EVs prioritization
does not compromise the smooth flow of regular traf-
fic. The algorithm’s effectiveness is evaluated through
extensive simulations, demonstrating its potential to
significantly improve traffic operations in mixed CAV
and EV environments. The structure of this paper is
as follows: In Section 2 the baseline model is ex-
plained, followed by the proposed model in Section
3. The results of the ADAPT-EMERG algorithm are
then compared to a baseline in Section 4. The paper
concludes with a summary of the findings, a discus-
sion of the limitations, and suggestions for future re-
search in Section 5.
2 BACKGROUND
In this paper, we extend the NEM and also use it as
a benchmark for evaluating the performance of our
proposed algorithm. The NEM is based on the Wiede-
mann 99 car-following model. Table 1 lists the vari-
ables used in the Wiedemann 99 model and NEM con-
trol strategy.
As shown in Figure 1, the NEM strategy includes
two metering zones and one merging zone. The
lengths of Metering Zones I and II are fixed and have
been determined through empirical analysis. In Me-
Adaptive Traffic Management for Emergency Vehicles in Work Zones
367
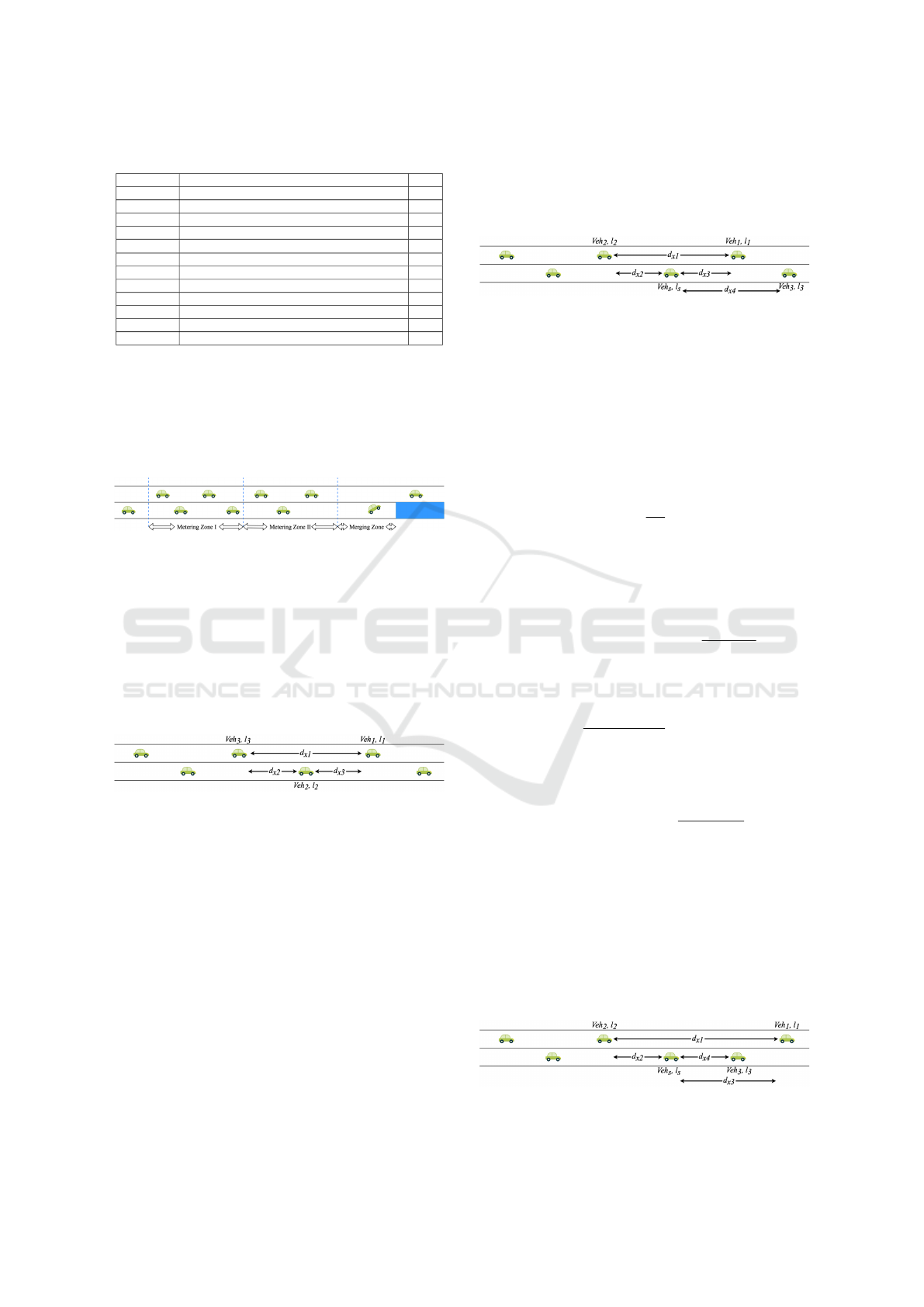
Table 1: Description of Variables.
Parameter Description Unit
CC0 Desired stop distance between vehicles m
CC1 Desired time gap kept by the following driver s
CC2 Additional space for the following vehicle m
dx Distance between leading and following vehicles m
acc Rate of vehicle acceleration m/s
2
v Vehicle speed m/s
d
x
1
Required distance in the open lane m
d
x
2
Gap between vehicles in the closed lane m
d
x
3
Distance in the closed lane m
CC1
open
Desired headway in the open lane s
CC1
closed
Desired headway in the closed lane s
V Speed limit within metering zones m/s
tering Zone I, vehicles increase their headways, and
lane changes are prohibited. In Metering Zone II,
vehicles in the open lane maintain normal behavior
while those in the closed lane adjust to keep safe dis-
tances. In the merging zone, lane changes are al-
lowed.
Figure 1: Architecture of NEM approach.
2.1 Longitudinal Control in Metering
Zone I
To ensure safety, the gap between vehicles in the open
lane is adjusted using Equation 1, illustrated in Figure
2.
d
x
1
>= d
x
2
+ l
2
+ d
x
3
(1)
Figure 2: Longitudinal control in Metering Zone I.
Using the Wiedemann 99 model, the minimum
value for d
x
1
is:
d
x
1
= CC0 +CC1
open
×V +CC2 (2)
For vehicles in the closed lane:
d
x
2
= d
x
3
>= CC0 +CC1
closed
×V +CC2 (3)
For these equations, V is the speed limit (20 m/s),
CC0 is 1.5 m, CC1
closed
is 1.7 s, and CC2 is 3.9 m.
CC1
open
is set to 3.9 s.
2.2 Longitudinal Control in Metering
Zone II
Metering Zone II aims to increase throughput. Vehi-
cles in the closed lane should travel near the midpoint
between consecutive vehicles in the open lane. De-
pending on vehicle positions, two scenarios arise:
In the first case, when d
x
4
>= d
x
3
, acceleration is
determined by Equations 4 to 7.
Figure 3: Longitudinal control in Metering Zone II (first
case).
If the gap between the subject vehicle and the
leader in the open lane is larger than the gap between
the subject vehicle (Veh
s
) and the follower in that lane
(Veh
3
), and the subject vehicle’s speed exceeds the av-
erage speed of the follower (Veh
2
) and leader (Veh
1
)
by more than 3 m/s, the acceleration of the subject
vehicle is determined using Equation 4:
d
x
3
> d
x
2
and v
s
> (v
1
+ v
2
)/2 + 3 : acc =
max(−
p
d
x
2
,(v
1
+ v
2
)/2 − v
s
) (4)
Based on the values of the variables, the appropri-
ate acceleration formula is applied using Equations 5,
6, and 7:
d
x
3
> d
x
2
and v
s
<= (v
1
+ v
2
)/2 + 3 : acc =
min(
p
d
x
3
− d
x
2
,2) (5)
d
x
3
<= d
x
2
and v
s
< (v
1
+ v
2
)/2 : acc =
min(−
q
(d
x
2
− d
x
3
)/2,(v
1
+ v
2
)/2 − v
s
) (6)
d
x
3
<= d
x
2
and v
s
>= (v
1
+ v
2
)/2 : acc =
max(−
q
(d
x
2
− d
x
3
),−2) (7)
In the second case, when d
x
4
< d
x
3
, two sub-cases
are considered:
d
x
2
+ d
x
4
>= 2 × d
x
u
: acc = Wiedemann(CC1 = 1.7)
(8)
d
x
2
+ d
x
4
< 2 × d
x
u
: acc = Wiedemann(CC1 = 10)
(9)
Figure 4: Longitudinal control in Metering Zone II (second
case).
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
368

The first sub-case applies when the gap is suffi-
cient for merging without affecting the open lane, us-
ing the default Wiedemann 99 model (Equation 8).
When the gap is insufficient, the second sub-case is
used (Equation 9).
3 METHODOLOGY
The proposed ADAPT-EMERG algorithm (Algo-
rithm 1) is designed to address the inefficiencies and
safety concerns identified in the literature. The al-
gorithm operates in distinct phases, depending on
the presence and position of the EV, adjusting traf-
fic flow, headway spacing, and VSL rules to ensure
safe and efficient navigation. This method proposes
a rule-based mechanism to enhance the performance
of EVs by guiding regular vehicles on how to dynam-
ically adjust their speed limits, lane positioning, and
headway spacing to accommodate the EVs’ passage
through work zones. By leveraging the communica-
tion capabilities of CAVs, the algorithm continuously
receives real-time updates from the environment and
communicates the necessary adjustments in a real-
time manner.
Phase 1: No EV Present
In the absence of an EV, the system functions nor-
mally according to NEM. NEM is applied to all vehi-
cles in the work zone area and speed limits and head-
way spacing are maintained at their default values.
During this phase, no special instructions are applied,
and the traffic system behaves as it would in a typi-
cal work zone scenario without the presence of EVs
(refer to Algorithm 1, lines 28 to 31).
Phase 2: EV Detected Before Metering Zone
When the presence of an EV is detected in the area
before the metering zone, the EV is directed to merge
into the open lane as long as safety conditions, such
as sufficient headway and no blockages, are met. This
early merge ensures that the EV can proceed through
the work zone with minimal interference (refer to Al-
gorithm 1, lines 4 and 5).
Phase 3: EV Detected in the Metering Zone
When the presence of an EV is detected in the me-
tering zone, the algorithm temporarily overrides the
NEM approach to prioritize the passage of the EV. If
the EV is in the open lane, the speed limit in that lane
is increased to 30, while the speed limit in the closed
lane is reduced to 10. These values were determined
by testing a range of speed limits from 5 m/s to 50
m/s, in increments of 5 m/s. The chosen values of 30
m/s and 10 m/s were identified as optimal based on
their ability to achieve the most significant improve-
ments across various performance metrics. This en-
courages vehicles in the closed lane to slow down, al-
lowing the EV to pass through more easily. If the EV
is in the closed lane, the speed limits are reset to their
default values, with both lanes maintaining a speed
limit of 20 (refer to Algorithm 1, lines 7 to 13).
Phase 4: EV in the Merging Zone
When the EV enters the merging zone, the algo-
rithm dynamically adjusts the headway between ve-
hicles based on the EV’s lane. If the EV is in the
closed lane, vehicles in the open lane are instructed to
increase their headway to 3.9 seconds, creating suf-
ficient space for the EV to merge safely. Once the
EV successfully merges into the open lane, and if an-
other EV is also present in the open lane, the head-
way is reduced to 1.7 seconds to allow the first EV
to pass through quickly. After the EV has passed, the
headway spacing returns to default values to facilitate
normal traffic flow and enable the merging of vehi-
cles from the closed lane (see Algorithm 1, lines 15 to
23). These headway values are based on the findings
in (Ren et al., 2020b).
Phase 5: EV Leaves the Work Zone
Once the EV has successfully passed through the
work zone, the algorithm restores the traffic manage-
ment system to its default state, and the NEM instruc-
tions are resumed for all vehicles in the work zone
(see Algorithm 1, lines 28 to 31).
4 EVALUATION
4.1 Simulation Settings
The algorithm was implemented using the Simula-
tion of Urban MObility (SUMO) traffic simulator,
known for its flexibility and well-documented fea-
tures. SUMO is an open-source software that includes
the Traffic Control Interface (TraCI) package, allow-
ing for time headway and speed limit adjustments.
The simulated network covers 2,000 meters before
the work zone, followed by 400 meters of the work
zone itself and an additional 400 meters after the work
zone. The study focuses on a two-lane highway with
the right lane closed due to a work zone. Each simu-
lation run lasts for an hour in real time and is repeated
20 times with different random seeds for consistency.
The traffic composition includes 3% heavy vehicles,
96% passenger cars, and 1% EVs.
4.2 Scenarios and Evaluation Metrics
To assess the effectiveness of the ADAPT-EMERG
algorithm, its results are compared with NEM (Ren
et al., 2020b) in different scenarios with varying levels
Adaptive Traffic Management for Emergency Vehicles in Work Zones
369
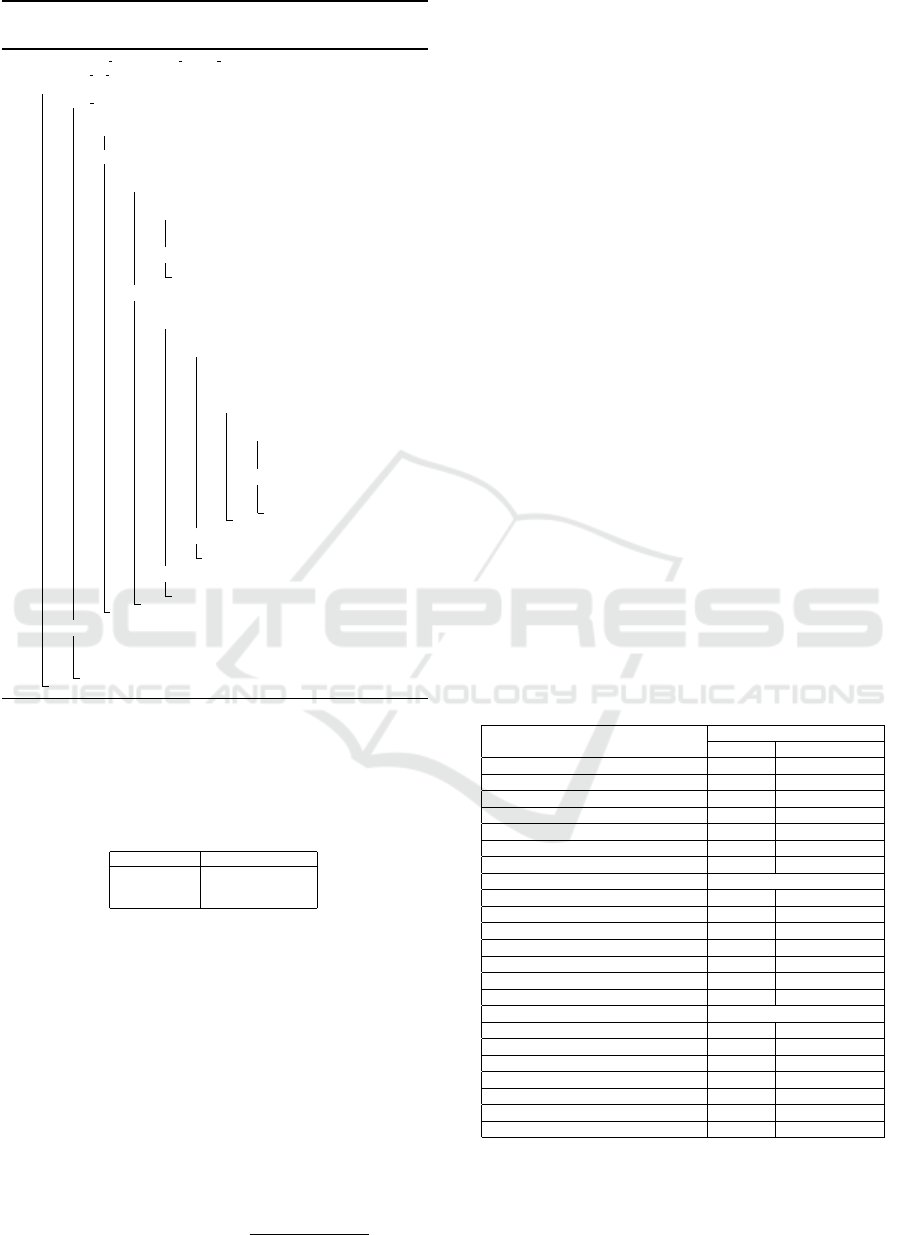
Algorithm 1: Adaptive Traffic Management for Emergency
Vehicles in Work Zones (ADAPT-EMERG).
Data: vehs, EV present, edge vehicle classes
Result: EV on lane
1 foreach vehicle veh in vehs do
2 if EV present then
3 (x,y) ← getPosition(veh);
4 if x < metering zone and vehicleClass = “emergency” then
5 changeVehicleLane ← openLane;
6 else
7 if x ∈ metering zones and vehicleClass = “emergency”
then
8 laneID ← getLaneID(veh);
9 if laneID = “openLane” then
10 setLaneMaxSpeed(“openLane”) ← 30;
11 setLaneMaxSpeed(“closedLane”) ← 10;
12 else
13 setLaneMaxSpeed ← 20;
14 else
15 if x ∈ merging zone and vehicleClass =
“emergency” then
16 laneID ← getLaneID(veh);
17 if laneID = “closedLane” then
18 vehiclesInLane ←
getLastStepVehicleIDs(“openLane”);
19 foreach V in vehiclesInLane do
20 if vehicleClass ̸= “emergency”
then
21 setVehicleHeadway ←
3.9;
22 else
23 setVehicleHeadway ←
1.7;
24 else
25 Apply NEM approach
26 else
27 Apply NEM approach
28 else
29 Apply NEM approach;
30 setLaneMaxSpeed(openLane) ← 20;
31 setLaneMaxSpeed(closedLane) ← 20;
of traffic. The scenarios in Table 2 are based on the
number of vehicles that entered the network within
one hour.
Table 2: Scenarios and Vehicle Input.
Scenario Vehicle Input (vph)
Medium 1,200
Congested 1,600
Oversaturated 2,000
The strategies are evaluated based on the evalua-
tion metrics described below:
• Throughput: This indicates the number of vehi-
cles that have successfully reached their destina-
tion.
• Average Waiting Time (AWT): AWT records the
average waiting time for all vehicles that have
been inserted.
• Average Travel Time (ATT): ATT shows the av-
erage travel time for all vehicles that exited the
simulation.
Average Travel Time =
Lane Length
Average Speed
(10)
• Average Time Loss (ATL) of EVs: ATL shows
the time lost by EVs from driving below the op-
timal speed. This includes slowdowns from inter-
sections but excludes scheduled stops.
• Average Depart Delay (ADD) of EVs: ADD
records the average waiting time for EVs that need
to be inserted in the network but cannot do so due
to insufficient road space.
• EV Count: This records the number of EVs that
finished their trips.
• Max Time Loss of EVs: This records the maxi-
mum time loss of all EVs.
5 RESULTS AND DISCUSSION
The effectiveness of the ADAPT-EMERG algorithm
was evaluated through a series of simulations under
three different traffic scenarios in terms of the con-
gestion level of the highway: Medium, Congested,
and Oversaturated scenarios. The performance of this
algorithm was recorded from 20 simulation runs us-
ing random seeds, and the reported values represent
the averages of these runs. The overall performance
of all control strategies is presented in Table 3. Also,
the percentage difference compared to the baseline is
provided in parentheses.
Table 3: Comparison of NEM Strategy and ADAPT-
EMERG.
Metrics
Scenario: Medium
NEM ADAP-EMERG
Throughput 1055 1145.85 (9%)
Average Waiting Time (AWT) 1.032 1.004 (3%)
Average Travel Time (ATT) 361.715 158.9955 (56%)
Average Time Loss (ATL) of EVs 87.5645 77.221 (12%)
Average Depart Delay (ADD) of EVs 4.4745 4.5045 (1%)
EV Count 11.85 12 (1%)
Max Time Loss of EVs 174.078 103.1385 (41%)
Scenario: Congested
Throughput 1397.4 1486.3 (7%)
Average Waiting Time (AWT) 33.5395 3.93 (88%)
Average Travel Time (ATT) 352.8105 231.418 (34%)
Average Time Loss (ATL) of EVs 171.63 165.6715 (3%)
Average Depart Delay (ADD) of EVs 28.493 4.7165 (83%)
EV Count 14.45 15.2 (5%)
Max Time Loss of EVs 322.0375 258.0475 (20%)
Scenario: Over Saturated
Throughput 1402.7 1493.75 (6%)
Average Waiting Time (AWT) 383.4785 341.991 (11%)
Average Travel Time (ATT) 351.9645 248.007 (30%)
Average Time Loss (ATL) of EVs 176.433 175.5235 (1%)
Average Depart Delay (ADD) of EVs 331.412 304.3585 (8%)
EV Count 14.5 15.3 (6%)
Max Time Loss of EVs 344.2225 292.2315 (15%)
The ADAPT-EMERG algorithm consistently en-
hances Throughput in all scenarios, showing a nearly
uniform percentage increase. This indicates its ef-
fectiveness in improving traffic flow and reducing
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
370

congestion. This algorithm reduces AWT signifi-
cantly, particularly in the congested scenario, indi-
cating more efficient traffic management and reduced
delays. The ADAPT-EMERG algorithm significantly
reduces ATT in all scenarios, with the most sub-
stantial improvement seen in medium-traffic environ-
ments, followed by congested and oversaturated sce-
narios. It should be noted that for NEM, ATT de-
creases as traffic density increases because synchro-
nized flow and effective coordination in certain den-
sity ranges enable smoother travel for many vehicles,
reducing overall average travel time despite higher
traffic volumes. Although the reduction in ATL for
EVs in the oversaturated condition is marginal, the
improvement is significant in medium scenarios. By
increasing the speed limit for the lane with an emer-
gency vehicle, other vehicles move faster, allowing
EVs to travel at their optimal speed. This algo-
rithm significantly reduces Departure Delays in al-
most full-capacity situations, proving its effectiveness
in improving EV response times under moderate to
high traffic conditions. By decreasing the departure
delay of vehicles, this approach accommodates more
EVs in all scenarios, especially in congested and over-
saturated environments, indicating better accommo-
dation of emergency traffic. Maximum Time Loss
for EVs is significantly reduced, particularly in the
medium-traffic scenario. Although the reduction is
less marked in congested scenarios, it is still consid-
erable, suggesting improved traffic management for
EVs. The ADAPT-EMERG algorithm outperforms
the NEM in all evaluated metrics and scenarios. The
most notable improvements are observed in through-
put, AWT, and ATT, especially under congested and
oversaturated conditions. This demonstrates the su-
perior capability of the ADAPT-EMERG algorithm in
handling varying traffic densities, leading to enhanced
traffic efficiency and reduced delays. However, de-
spite substantial improvements in most metrics, the
ADAPT-EMERG algorithm has a minor impact on
the ATL of EVs in the oversaturated condition, sug-
gesting a potential area for further optimization. Ad-
ditionally, the improvement in AWT and ADD for
medium traffic is not significant, because vehicles in
such conditions already depart and move smoothly
without delay due to the lack of congestion and ob-
stacles.
Time Loss of Emergency Vehicles: In Figure 5,
the analysis of time loss for EVs is presented under
three scenarios. The comparison is made between
the NEM and ADAPT-EMERG algorithms. In the
medium scenario (Figure 5a), the ADAPT-EMERG
algorithm shows its efficiency by significantly reduc-
ing time loss for EVs. While 42% of EVs using the
NEM have a time loss under 60 seconds, compared
to 17% for the ADAPT-EMERG algorithm. In the
ADAPT-EMERG algorithm, no EV has a time loss
of over 120 seconds. In contrast, 17% of EVs us-
ing the NEM face a time loss above this limit. In
the congested scenario (Figure 5b), both approaches
perform similarly regarding time loss below 60 sec-
onds (7% for NEM and 7% for ADAPT-EMERG).
However, the ADAPT-EMERG algorithm completely
eliminates time loss above 260 seconds, whereas 14%
of EVs using the NEM experience significant delays.
Under over-saturated conditions (Figure 5c), the per-
centage of time loss below 60 seconds is similar for
both approaches (7% for NEM and 7% for ADAPT-
EMERG). However, the ADAPT-EMERG algorithm
again shows a significant advantage by eliminating in-
stances of time loss above 280 seconds, whereas the
NEM results in 7% of cases with severe delays. Over-
all, the ADAPT-EMERG algorithm demonstrates bet-
ter performance in minimizing time loss for EVs
across all scenarios. This analysis highlights ADAPT-
EMERG’s capability to manage time loss more ef-
fectively, ensuring faster and more predictable travel
times for emergency responders.
Travel Time of EVs: Figure 6 compares the trip
durations of EVs under three different traffic scenar-
ios using different approaches. In the medium sce-
nario (Figure 6a), the NEM has an average trip du-
ration of 204.67 seconds, while the ADAPT-EMERG
algorithm has a significantly lower average trip dura-
tion of 146.75 seconds. The maximum trip duration
for the NEM is 335.0 seconds, compared to 182.0
seconds for the ADAPT-EMERG algorithm. The
ADAPT-EMERG algorithm outperforms the NEM
with an average trip duration of approximately 28%
shorter and a notable reduction in maximum trip du-
ration. In the congested scenario (Figure 6b), the
average travel time for the NEM is 287.64 seconds,
whereas the ADAPT-EMERG algorithm achieves
an average trip duration of 241.87 seconds. The
maximum trip duration for the NEM is 568.0 sec-
onds, compared to 318.0 seconds for the ADAPT-
EMERG algorithm. The ADAPT-EMERG algorithm
demonstrates superiority with an average trip duration
roughly 16% shorter and a considerably lower max-
imum trip duration. In the over saturated scenario
(Figure 6c), the average trip duration for the NEM
is 290.14 seconds, while the ADAPT-EMERG algo-
rithm records an average trip duration of 239.87 sec-
onds. The maximum trip duration for the NEM is
452.0 seconds, in contrast to 332.0 seconds for the
ADAPT-EMERG algorithm. Even in congested con-
ditions, the ADAPT-EMERG algorithm maintains a
shorter average trip duration by about 17%, and the
Adaptive Traffic Management for Emergency Vehicles in Work Zones
371
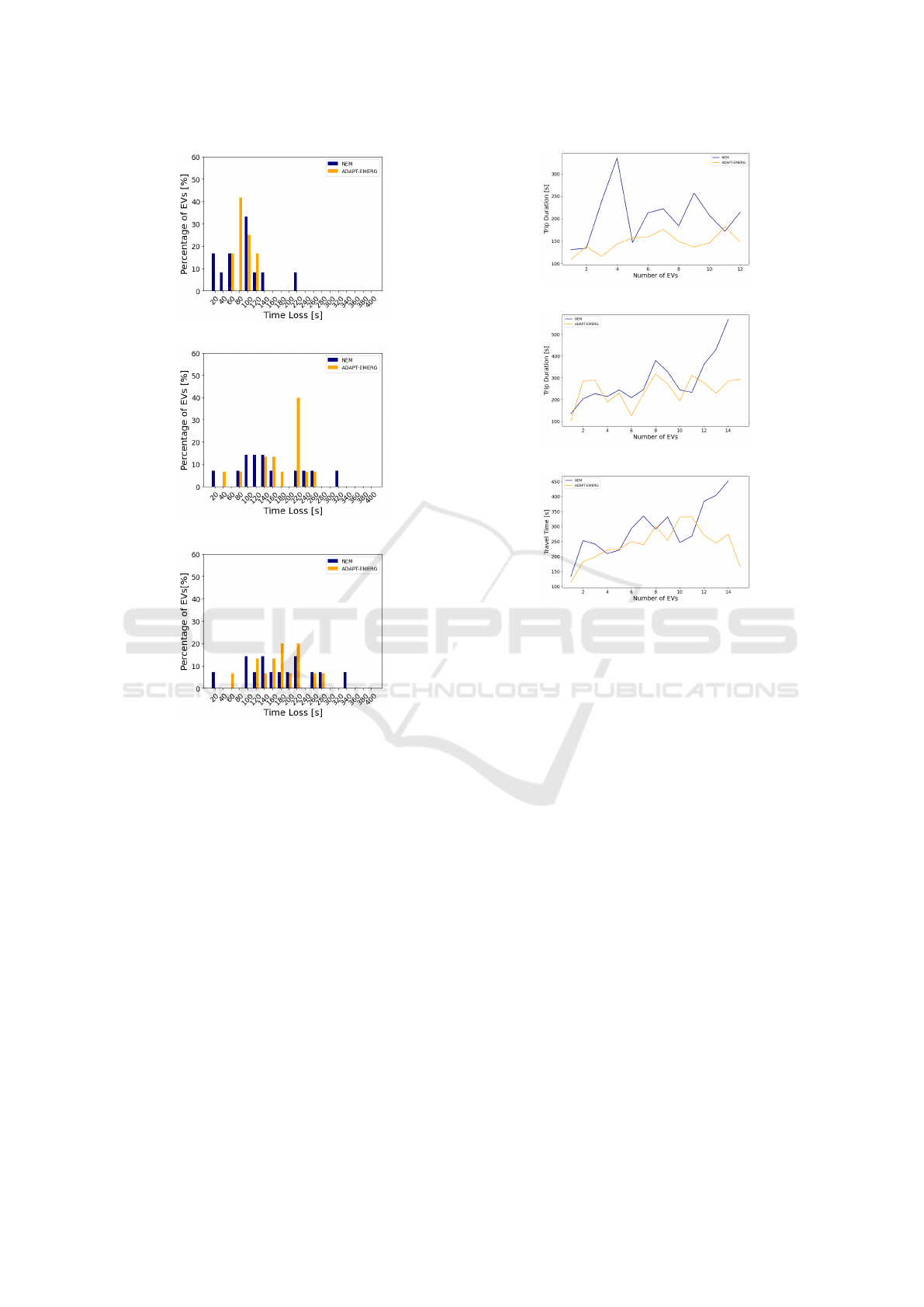
(a) Medium scenario
(b) Congested scenario
(c) Over saturated scenario
Figure 5: Distribution of time loss of EVs.
maximum trip duration remains lower than the NEM.
Across all scenarios, the ADAPT-EMERG algorithm
consistently results in shorter average and maximum
trip durations compared to the NEM.
6 CONCLUSION AND FUTURE
WORKS
Given the aging infrastructure and the anticipated in-
crease in highway work zones, enhancing work zone
mobility and safety is crucial. Data shows improper
merging maneuvers significantly contribute to high-
way work zone accidents, leading to severe conges-
tion and delays. A previous study introduced the New
England Merge (NEM) strategy, which requires vehi-
cles to cooperate and create safe merging gaps when
approaching lane closures in work zones. However,
(a) Medium scenario
(b) Congested scenario
(c) Over saturated scenario
Figure 6: Trip duration of EVs in NEM and ADAPT-
EMERG approaches.
the performance of Emergency Vehicles (EVs) under
this strategy was not explored. This research intro-
duces Adaptive Traffic Management for Emergency
Vehicles in Work Zones (ADAPT-EMERG) that mod-
ifies the NEM strategy when an EV is approach-
ing, integrating merging techniques, headway spac-
ing, and Variable Speed Limit (VSL) rules. The re-
sults demonstrate that this algorithm significantly en-
hances EV efficiency, reducing travel time and im-
proving overall safety and mobility in highway work
zones. The ADAPT-EMERG algorithm consistently
proves to be a more efficient and reliable traffic man-
agement strategy compared to the NEM. It results in
lower average travel times, reduces time loss for EVs,
and shortens trip durations across various traffic sce-
narios. These findings suggest that implementing the
ADAPT-EMERG algorithm can significantly improve
traffic flow and EVs’ response times, making it a su-
perior choice for modern traffic management systems.
Future research should evaluate the performance of
other vehicle types in work zones and consider addi-
tional rules based on vehicle properties, such as size.
Developing an algorithm that optimizes performance
while considering the needs of all road users will be
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
372

essential for comprehensive traffic management solu-
tions.
ACKNOWLEDGEMENTS
This work is supported by the European Union’s
Horizon Europe research and innovation program un-
der the agreement number Augmented CCAM No
101069717.
REFERENCES
Abboud, K., Omar, H. A., and Zhuang, W. (2016). Inter-
working of DSRC and cellular network technologies
for V2X communications: A survey. IEEE Transac-
tions on Vehicular Technology, 65(12):9457–9470.
Algomaiah, M. and Li, Z. (2021). Exploring work zone late
merge strategies with and without enabling connected
vehicles technologies. Transportation Research Inter-
disciplinary Perspectives, 9:100316.
Algomaiah, M. and Li, Z. (2022). Enhancing work zone
capacity by a cooperative late merge system using de-
centralized and centralized control strategies. Jour-
nal of Transportation Engineering, Part A: Systems,
148(2):04021107.
Cao, D., Wu, J., Wu, J., Kulcs
´
ar, B., and Qu, X.
(2021). A platoon regulation algorithm to im-
prove the traffic performance of highway work zones.
Computer-Aided Civil and Infrastructure Engineer-
ing, 36(7):941–956.
Dixon, K. K., Hummer, J. E., and Lorscheider, A. R.
(1996). Capacity for north carolina freeway work
zones. Transportation Research Record, 1529(1):27–
34.
Ghanadbashi, S. and Golpayegani, F. (2022). Using ontol-
ogy to guide reinforcement learning agents in unseen
situations: A traffic signal control system case study.
Applied Intelligence, 52(2):1808–1824.
Ghanadbashi, S., Malekjafarian, A., and Gholpayegani, F.
(2024a). CAV-enabled ontology-driven evacuation ap-
proach for dynamic emergency. In Proceedings of
the Civil Engineering Research Association of Ireland
(CERAI).
Ghanadbashi, S., Safavifar, Z., Taebi, F., and Golpayegani,
F. (2024b). Handling uncertainty in self-adaptive
systems: an ontology-based reinforcement learning
model. Journal of Reliable Intelligent Environments,
10(1):19–44.
Golpayegani, F., Ghanadbashi, S., and Riad, M. (2021). Ur-
ban emergency management using intelligent traffic
systems: Challenges and future directions. In 2021
IEEE International Smart Cities Conference (ISC2),
pages 1–4. IEEE.
Guo, J., Ghanadbashi, S., Wang, S., and Golpayegani, F.
(2023). Urban traffic signal control at the edge: An
ontology-enhanced deep reinforcement learning ap-
proach. In 2023 IEEE 26th International Conference
on Intelligent Transportation Systems (ITSC), pages
6027–6033. IEEE.
Kang, K.-P., Chang, G.-L., and Paracha, J. (2006). Dynamic
late merge control at highway work zones: Evalua-
tions, observations, and suggestions. Transportation
Research Record, 1948(1):86–95.
Kurker, M., Fournier, C., Zhao, Q., Hakimi, S., Qi, Y., Tang,
S., Liu, R., Juri, N. R., Duthie, J., Machemehl, R.,
et al. (2014). Minimizing user delay and crash poten-
tial through highway work zone planning. Technical
report, Texas. Dept. of Transportation. Research and
Technology Implementation Office.
Liu, H., Wei, H., Zuo, T., Li, Z., and Yang, Y. J. (2017).
Fine-tuning adas algorithm parameters for optimizing
traffic safety and mobility in connected vehicle envi-
ronment. Transportation Research Part C: Emerging
Technologies, 76:132–149.
Meng, Q. and Weng, J. (2013). Uncertainty analysis of acci-
dent notification time and emergency medical service
response time in work zone traffic accidents. Traffic
Injury Prevention, 14(2):150–158.
Mikolasek, I., Ghanadbashi, S., Afraz, N., and Gol-
payegani, F. (2024). Data sharing at the edge of
the network: A disturbance resilient multi-modal ITS.
arXiv preprint arXiv:2405.12431.
Ramadan, O. E. and Sisiopiku, V. P. (2016). Evaluation of
merge control strategies at interstate work zones un-
der peak and off-peak traffic conditions. Journal of
Transportation Technologies, 6(3):118–130.
Ramadan, O. E. and Sisiopiku, V. P. (2018). Modeling high-
way performance under various short-term work zone
configurations. Journal of Transportation Engineer-
ing, Part A: Systems, 144(9):04018050.
Ren, T., Xie, Y., and Jiang, L. (2020a). Cooperative high-
way work zone merge control based on reinforcement
learning in a connected and automated environment.
Transportation Research Record, 2674(10):363–374.
Ren, T., Xie, Y., and Jiang, L. (2020b). New Eng-
land Merge: A novel cooperative merge control
method for improving highway work zone mobility
and safety. Journal of Intelligent Transportation Sys-
tems, 25(1):107–121.
Riad, M., Ghanadbashi, S., and Golpayegani, F. (2022).
Run-time norms synthesis in dynamic environments
with changing objectives. In Irish Conference on Ar-
tificial Intelligence and Cognitive Science, pages 462–
474. Springer.
Stewart, R. (1990). Pre-hospital care of trauma. McMurtry
RY and McLellan BA, Management of Blunt Trauma,
Baltimore, MD: Williams and Wilkins, pages 23–29.
Wu, J., Kulcs
´
ar, B., Ahn, S., and Qu, X. (2020). Emergency
vehicle lane pre-clearing: From microscopic cooper-
ation to routing decision making. Transportation Re-
search Part B: Methodological, 141:223–239.
Adaptive Traffic Management for Emergency Vehicles in Work Zones
373
