
Exploring and Evaluating Interplays of BPpy with Deep Reinforcement
Learning and Formal Methods
Tom Yaacov
1
, Gera Weiss
1
, Adiel Ashrov
2
, Guy Katz
2
and Jules Zisser
1
1
Ben-Gurion University of the Negev, Israel
2
The Hebrew University of Jerusalem, Israel
Keywords:
Behavioral Programming, Deep Reinforcement Learning, Formal Methods.
Abstract:
We explore and evaluate the interactions between Behavioral Programming (BP) and a range of Artificial In-
telligence (AI) and Formal Methods (FM) techniques. Our goal is to demonstrate that BP can serve as an
abstraction that integrates various techniques, enabling a multifaceted analysis and a rich development pro-
cess. Specifically, the paper examines how the BPpy framework, a Python-based implementation of BP, is
enhanced by and enhances various FM and AI tools. We assess how integrating BP with tools such as Satisfi-
ability Modulo Theory (SMT) solvers, symbolic and probabilistic model checking, and Deep Reinforcement
Learning (DRL) allow us to scale the abilities of BP to model complex systems. Additionally, we illustrate
how developers can leverage multiple tools within a single modeling and development task. The paper pro-
vides quantitative and qualitative evidence supporting the feasibility of our vision to create a comprehensive
toolbox for harnessing AI and FM methods in a unified development framework.
1 INTRODUCTION
It is commonly agreed that the future of software de-
velopment, especially in reactive systems, relies on
the use of models, advanced analysis techniques, and
artificial intelligence (AI) (Naveed et al., 2024). How-
ever, while the current state-of-the-art involves vari-
ous analysis tools and techniques, each still uses its
own input language and modeling approach, requir-
ing manual integration to combine results with system
code. Finding a modeling framework that can safely
interweave user code and machine-generated artifacts
while supporting formal analysis is a challenging re-
search problem. This paper examines the Behavioral
Programming (BP) framework (Harel et al., 2012)
and its potential as a unified modeling abstraction that
glues tools without manual translation, showing its
effectiveness in combining multiple tools throughout
the software development process.
BP is a software engineering paradigm designed
to allow developers to specify the behavior of reactive
systems incrementally and intuitively, aligning with
how they perceive the system’s requirements (Harel
et al., 2012). Its primary strength lies in its abil-
ity to break down intricate specifications into man-
ageable components that interact through a unified
protocol, enabling the creation of desired behavior.
This compositional modeling capability can be ap-
plied across various domains (Bar-Sinai et al., 2018)
and integrated with techniques from different disci-
plines (Bar-Sinai and Weiss, 2021).
The benefits afforded by BP to traditional software
engineering have been studied extensively (Elyasaf
et al., 2019; Elyasaf, 2021). In this work, we aim
to complement existing research by focusing on the
problem at hand — namely, the integration of BP with
AI and formal analysis (FM) techniques. Specifically,
we utilize the BPpy library (Yaacov, 2023), a frame-
work for BP in Python, along with several Python-
based libraries, to explore the interplay and benefits
that arise from these combinations. Ultimately, we
aim to lay the groundwork for constructing a compre-
hensive software engineering toolbox to harness mod-
ern AI and FM techniques.
Our contributions include:
Satisfiability-Modulo-Theory (SMT): We present an
enhanced communication protocol among modules
for solving complex constraint systems and show it
promotes the efficiency of the execution mechanism.
Symbolic Model Checking: We developed a method
that allows the verification of large BP models by an-
alyzing each module separately and combining them
symbolically.
Yaacov, T., Weiss, G., Ashrov, A., Katz, G. and Zisser, J.
Exploring and Evaluating Interplays of BPpy with Deep Reinforcement Learning and Formal Methods.
DOI: 10.5220/0013215200003928
In Proceedings of the 20th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2025), pages 27-40
ISBN: 978-989-758-742-9; ISSN: 2184-4895
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
27

Probabilistic Model Checking: We designed an ap-
proach that facilitates the analysis of probabilistic as-
pects of a behavioral system.
Deep Reinforcement Learning (DRL): We present a
framework that improves the alignment of require-
ments with BP modules, delivering a more efficient
execution mechanism.
While this is not the main focus of the paper, it is
worth noting that benefits go both ways: BP’s effec-
tive system components management can boost these
tools. For instance, BP can serve as a theory for SMT
solvers by dynamically generating candidate runs and
incrementally revealing constraints, like other theo-
ries guide the solver’s reasoning process. In the con-
text of DRL, we leverage the flexibility offered by BP
to specify a system’s behavior only partially, leaving
gaps for the DRL engine to resolve. This approach
can help guide the learning process and safeguard the
resulting execution mechanism from leading to unde-
sirable outcomes. BP’s flexible division of the model
into smaller modules can also aid in symbolic or prob-
abilistic verification process and facilitate more natu-
ral and direct modeling. This differs from current al-
ternatives, focusing on a monolithic state-based sys-
tem description.
This study not only focuses on new integrations.
While the symbolic and probabilistic verification in-
tegrations presented here are novel, the combina-
tion of SMT and DRL with BP was discussed in
prior research (Katz et al., 2019; Eitan and Harel,
2011; Elyasaf et al., 2019; Yaacov, 2023). To pro-
vide a comprehensive understanding of the benefits of
these integrations, we incorporated ideas from previ-
ous work, introduced new tools, and conducted fresh
evaluations comparing them against current alterna-
tives in BP to assess the effectiveness of all tools in
new dimensions.
As a glimpse into a future research direction, we
also present a small experiment showing the applica-
bility of combining SMT solvers, probabilistic mod-
eling, and DRL in conjunction with BP. The result of
this study provides compelling evidence, in our opin-
ion, of the viability of using BP as a modeling ap-
proach that supports all the aforementioned methods.
The structure of the paper is as follows: We
start with a short introduction to BP and BPpy
in Section 2. Subsequently, each integration is
discussed individually in sections 3 to 6. These
sections include evaluations and analyses. We
do not devote separate sections to related work
and comprehensive conclusions, as relevant refer-
ences and discussion are provided within each sec-
tion. In Section 7, we showcase the combined
use of these integrations. All supplementary mate-
rial is available at https://github.com/bThink-BGU/
Papers-2025-ENASE-BPpyEvaluation.
2 BEHAVIORAL
PROGRAMMING & BPpy
To introduce the reader to the language of BP, we be-
gin by describing the BPpy package and the general
BP principles it implements. In BP, developers spec-
ify scenarios, named b-threads, which are simple se-
quential threads of execution that represent behaviors
the system should include or avoid. Each scenario is
standalone and is usually self-contained, concerning
itself with a specific aspect of the system—typically,
a single requirement. During runtime, an application-
agnostic execution mechanism interprets and inter-
weaves these b-threads to generate a cohesive system
behavior. Specifically, the mechanism is based on a
synchronization protocol presented by (Harel et al.,
2010). It consists of each b-thread submitting a state-
ment before selecting each event that the b-program
produces. When a b-thread reaches a point where
it is ready to submit a statement, it synchronizes a
statement with its peers, declaring which events it
requests, which events it waits for (but does not re-
quest), and which events it blocks (prevents from oc-
curring). After submitting the statement, the b-thread
is paused. Once all b-threads have submitted their
statements, we say the b-program has reached a syn-
chronization point. At this point, an event arbiter se-
lects a single event that has been requested and is not
blocked. It then resumes all b-threads that either re-
quested or waited for the selected event. The other b-
threads remain paused, and their statements are used
in the next synchronization point. This process is re-
peated throughout the execution of the program. A
formal definition of BP semantics is available as an
appendix in the supplementary material.
To make BP’s core concepts more concrete, we
begin with an illustrative example of a b-program (a
set of b-threads) implemented in BPpy. The example
is an adaptation of one of the sample b-programs pre-
sented in the work of (Harel et al., 2012) describing
a system responsible for controlling the mixing of hot
and cold water from two separate taps. Listing 1 de-
picts three b-threads. Each b-thread is implemented
as a Python generator—a function that can pause it-
self and pass data back to its caller at any point, using
the yield idiom. It can then be resumed when re-
invoked with the send method. The statements sub-
mitted by each b-thread are structured as sync class
instances containing events or event sets labeled by
the arguments request, block, waitFor. The exe-
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
28

cution mechanism in BPpy starts by independently in-
voking each b-thread generator and awaiting its state-
ment yield. Once all the statements have been col-
lected, an event is selected, and the program resumes
its execution based on the aforementioned synchro-
nization protocol.
@t hr ead
def ad d_ ho t () :
for i i n ra nge (3) :
yi eld sy n c ( r e qu es t = BE ve nt ( " HOT " ) )
@t hr ead
def ad d_ co ld ( ) :
for i i n ra nge (3) :
yi eld sy n c ( r e qu es t = BE ve nt ( " CO LD " ))
@t hr ead
def co nt ro l () :
wh ile Tr u e :
yi eld sy n c ( w a it Fo r = BE ve nt ( " HOT " ) )
yi eld sy n c ( w a it Fo r = All () , bl ock = BEv en t (" H OT " ))
Listing 1: The HOT/COLD b-program (Harel et al., 2012).
The first two b-threads, add_hot and add_cold,
request the event of pouring a small amount of hot and
cold water, respectively, three times. Unlike many
other programming paradigms, BP offers developers
the flexibility not to be bound by a single predefined
behavior for the system. Instead, the system has the
freedom to select any behavior that aligns with all the
defined b-threads. For instance, a b-program consist-
ing of the two b-threads shown in Listing 1 does not
impose a specific order for pouring hot and cold wa-
ter. Consequently, its execution can generate all se-
quences that include exactly three occurrences of the
HOT event and three occurrences of the COLD event.
To illustrate further, consider that after running
the initial version of the system for some time, a
safety concern arises, and a new requirement is in-
troduced, stating that it is undesirable to have two
consecutive HOT events. While it is possible to mod-
ify the add_hot b-thread by adding new conditions
and statements, the BP paradigm encourages us to
maintain the alignment between existing b-threads
and their respective requirements and add a new b-
thread. This approach promotes an incremental and
modular development style, where developers can add
or remove behaviors independently without affecting
other b-threads. Thus, we introduce the control b-
thread in Listing 1, which repeatedly waits for the oc-
currence of HOT and then blocks HOT while waiting for
any following event using the All event set.
3 BP ⇔ SMT SOLVERS
BPpy implements SMT solver integration following
the concepts outlined in (Katz et al., 2019). The im-
plementation is based on the Z3-solver (De Moura
and Bjørner, 2008) package, although other solvers
may also be used. In this integration, events are
represented as an assignment over a set of SMT
variables. At each synchronization point, b-threads
specify request/block/waitFor constraints over the
variables in the form of logical statements to be sat-
isfied. Once all constraints are collected, the execu-
tion mechanism invokes the solver to find a satisfying
assignment to the variables embedded in these con-
straints. Specifically, the solver finds an assignment
requested by at least one b-thread that is not blocked.
To introduce this integration, we begin with
an illustration of the Cinderella-Stepmother prob-
lem (Bodlaender et al., 2012). This problem involves
a two-player game with a system of water buckets.
Initially, there are N empty buckets arranged in a cir-
cle, each with a capacity of B water units. In each
turn, Cinderella’s stepmother distributes A water units
across the buckets as she chooses. Subsequently, Cin-
derella empties C adjacent buckets. This cycle of the
stepmother pouring and Cinderella emptying repeats.
The stepmother’s objective is to fill one bucket with
B units, while Cinderella aims to prevent any bucket
from becoming full.
The code in Listing 2 exemplifies a solver-based
version of the Cinderella-Stepmother example. It
consists of the main b-thread, which is responsible
for changing the assignments to the buckets list of
integers based on the constraints generated by the
stepmother and cinderella functions. These func-
tions use the last selected assignment, which is re-
turned through the b-thread’s yield command. The
bucket_limit b-thread ensures that the variables
will not exceed the buckets’ capacity B. We note that
bucket_limit does not specify request or wait-for
constraints. Thus, its blocking constraint remains in-
variant throughout the execution of the b-program.
The SMT solver integration allows b-threads to
communicate versatile variable assignments, going
beyond discrete events. Along with its advantages
in enhancing expressiveness, extensively discussed
in (Katz et al., 2019), it can potentially improve BP’s
computational capabilities during execution. This
section aims to validate this assumption by compar-
ing the conventional discrete event mechanism and
the presented SMT-based event mechanism. To assess
this, a set of empirical experiments was carried out
to measure the runtime execution and memory effi-
ciency of a b-program tasked with solving a multiple-
constraint problem using both approaches. The com-
plete code developed for this evaluation is available in
the supplementary material.
Exploring and Evaluating Interplays of BPpy with Deep Reinforcement Learning and Formal Methods
29
bu ck ets = [ In t (f "b { i} " ) for i in ran ge ( N) ]
def st ep mo th er ( pre v ):
ad ded = S um ([ b - pr e v . ev al ( b) f or b in b uc ke ts ] )
no n_ neg = And ( [ b - pr ev . e v al ( b) >=0 f or b in buc ke ts ] )
re tur n A nd ( ad de d == A , no n_ ne g )
def ci nd er el la ( pre v ):
r = l ist ( ran ge ( N ) ) + li st ( r a ng e (N ) )
def em pty ( r ng ) :
cs = [] # c on st ra in ts li s t
for j i n ra nge ( N ):
if j in r ng :
cs . ap pe nd ( b uc ke ts [ j] == 0)
el s e :
cs . ap pe nd ( b uc ke ts [ j] == pre v . ev a l ( b u ck et s [ j ] ) )
re tur n A nd ( cs )
re tur n O r ([ e m pt y (r [ i: i+ C ]) f or i in r an ge ( N) ])
@t hr ead
def bu ck et _ l i m i t () :
wh ile Tr u e :
yi eld sy n c ( bl oc k = O r ([ b > B for b i n b u ck et s ]) )
@t hr ead
def mai n () :
e= yie ld syn c ( re qu est = And ( [b = =0 f or b in b uc ke ts ] )
for i i n ra nge ( STE PS ) :
e = y ie ld syn c ( re qu e st = st ep mo th er ( e ))
e = y ie ld syn c ( re qu e st = ci nd er el la ( e ))
Listing 2: A BP solver-based implementation to the
Cinderella-Stepmother program.
The evaluation included three use cases. The first
is the Cinderella-Stepmother problem, for which we
developed an equivalent discrete implementation and
compared its performance with the solver-based im-
plementation presented in Listing 2. This implemen-
tation generates all the possible states of the buckets
as individual events. We tested the programs with in-
creasing parameter values of B and N. Since the com-
plexity increases very rapidly in the discrete case with
N, we only show here the growth with B.
The second use case is an adaptation of the Lights
Out puzzle game (Anderson and Feil, 1998), which
we refer to as the bit-flip problem. The problem do-
main is a Boolean matrix of dimensions N × M. At
first, the matrix is randomly initialized, and in each
move, a single row or column values are flipped.
Also, in each move, one row or column cannot be
flipped, and it is therefore blocked. A potential ob-
jective is to find a sequence of bit-flips to transition
the matrix from one configuration to another. This
problem is relevant as Boolean matrices can effec-
tively represent reactive systems such as communi-
cation networks.
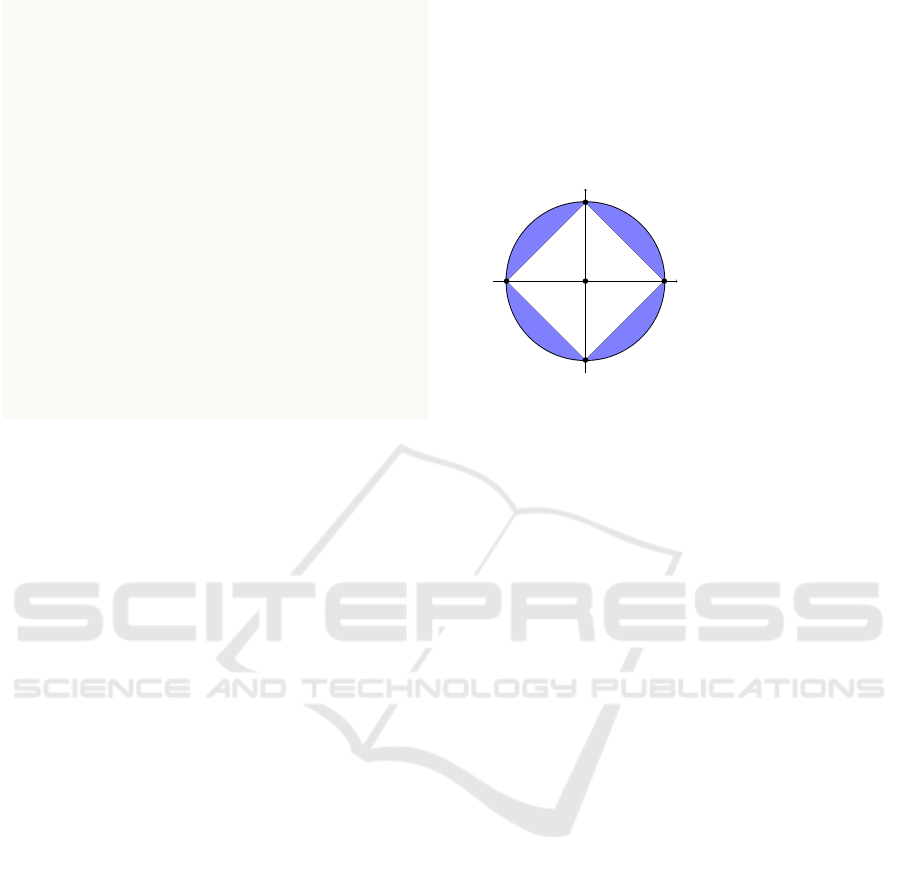
For the third example, we implemented the circled
polygon example (see Figure 1). The program’s ob-
jective is to find a coordinate outside a regular poly-
gon’s area but inside the circumscribing unit circle.
We tested this problem with an increasing number of
polygon edges. The problem relevance stems from
its multifaceted nature, common in reactive systems
with geometrical constraints involving real-valued pa-
rameters that BP is well-suited to solve (Katz et al.,
2019; Elyasaf, 2021). The discrete implementation
solves this multi-constraint problem by discretizing
the product of the two-dimensional continuous inter-
vals [−1, 1]
2
(the area enclosing the circle centered
at (0, 0)) incrementally. As the number of edges in
the polygon grows, the area between the polygon and
the circle diminishes, necessitating finer discretiza-
tion and an increase in the number of events to find
a solution.
x
y
y = x + 1
y = −x + 1
y = x − 1
y = −x − 1
x
2
+ y
2
= 1
(1, 0)
(0, 1)
(0, 0)(−1, 0)
(0, −1)
Figure 1: A circled
polygon problem with
4 edges. The colored
area between the poly-
gon and the circle rep-
resents the area of po-
tential solutions to the
problem.
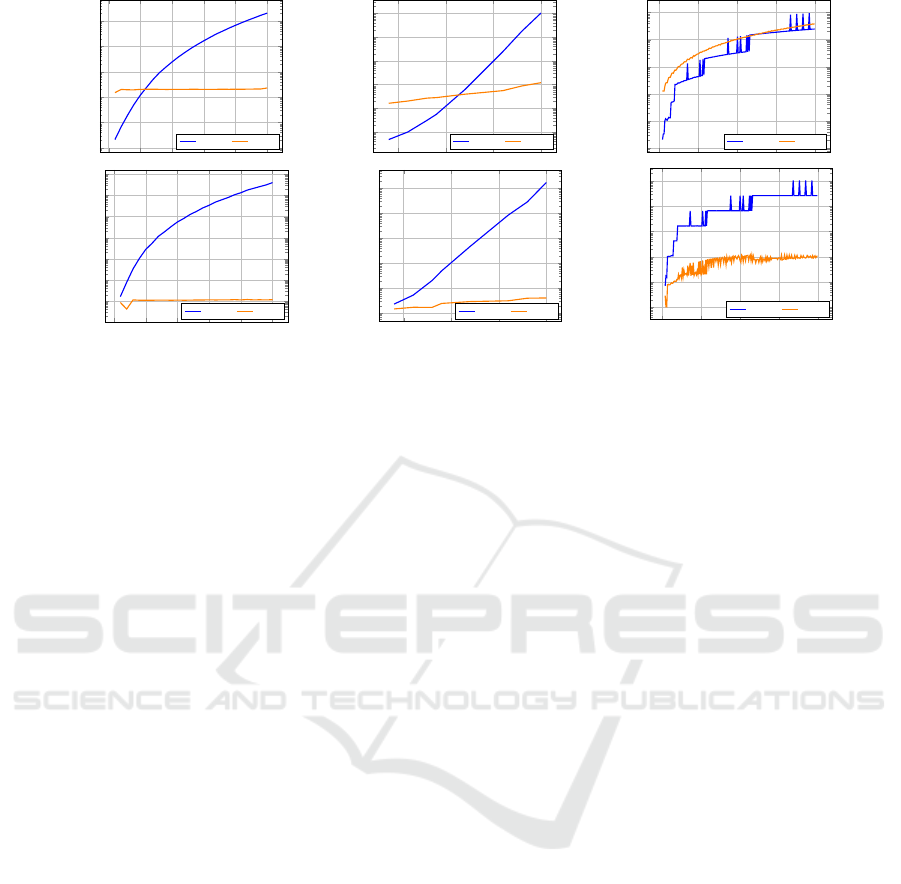
The memory and runtime results for the three use
cases are shown in Figure 2. For the Cinderella-
Stepmother and bit-flip problem, the runtime and
memory performance of the discrete implementation
exponentially increases with B and N × M, respec-
tively. This behavior aligns with expectations, as
increasing parameter values increase the number of
events, which means that more events are being ex-
amined at the synchronization point, and hence, addi-
tional runtime and memory are needed. The runtime
and memory usage of the solver-based Cinderella-
Stepmother implementation remained constant as the
problem size increased, while the solver-based bit-
flip implementation increased exponentially but with
a significantly smaller slope.
For the circled polygon problem, both implemen-
tations exhibit a significant increase in runtime as the
complexity rises, contrasting with previous results.
We attribute this latter increase to the fact that we
now have many equations over real-valued variables;
this may be because, in this model, the SMT engine
runs the theory module many times. Interestingly, the
runtime of the discrete implementation remains simi-
lar or lower until n = 164, after which it spikes sig-
nificantly. This behavior stems from varying com-
plexities, where some instances are straightforward
for the discrete implementation, while others require
finer discretization. Regarding memory usage, the
solver-based implementation maintains a distinct ad-
vantage, stabilizing around n = 100. Nevertheless,
the memory values surpass those of previous exam-
ples, underscoring the problem’s complexity for the
solver. Conversely, the discrete version memory us-
age increases with finer discretization as complexity
rises, with spikes similar to the runtime analysis, in-
dicating the discussed unexpected behavior.
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
30
0
5
10
15
20
25
10
0
10
1
10
2
10
3
10
4
10
5
Runtime (ms.)
Discrete Solver
5
10
15
20
10
1
10
2
10
3
10
4
10
5
10
6
Runtime (ms.)
Discrete Solver
0
50
100
150
200
10
0
10
1
10
2
10
3
10
4
10
5
Runtime (ms.)
Discrete Solver
0
5
10
15
20
25
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
B
Memory usage (KB)
Discrete Solver
(a) Cinderella-Stepmother
(N=5,C=2,A=5).
5
10
15
20
10
−2
10
−1
10
0
10
1
10
2
10
3
N X M
Memory usage (KB)
Discrete Solver
(b) bit-flip.
0
50
100
150
200
10
0
10
1
10
2
10
3
10
4
10
5
Number of Edges (n)
Memory usage (KB)
Discrete Solver
(c) Circled polygon.
Figure 2: The runtime and memory of the discrete and solver-based implementations for the three problems. The values on
the y-axis were converted to log
10
scale due to the variance in the original scales.
In summary, our study encompassed a perfor-
mance evaluation contrasting discrete and solver-
based implementations across the domains of
Boolean, Integer, and Real variables, with various
types of constraints and different levels of complex-
ities. The experiments confirmed the anticipated su-
periority of the solver-based approach. Additionally,
we showcased the adaptability of BP’s SMT solvers
integration in tackling various problem scenarios.
The potential use of BP to enhance SMT capabil-
ities has been explored in prior studies (Harel et al.,
2013). While SMT solvers are crucial for various ap-
plications like software verification and program syn-
thesis, their incompleteness can hinder their effective-
ness. Integrating BP with SMT can enhance system
robustness and reliability, potentially leading to more
advanced automated theorem-proving tools for spe-
cific theories like arithmetic and arrays. As mentioned
in the introduction, BP can serve as a theory for de-
ciding behavioral constraints in a setting where we try
to find runs that satisfy a set of constraints modeled as
a composition of b-threads.
Qin et al. utilized SMT in conjunction with BIP
models, employing it to prune unsatisfiable transitions
in Open Automata derived from Open pNets (Qin
et al., 2020). Their work emphasizes formal analy-
sis rather than enhancing the underlying mechanism.
In contrast, our approach integrates SMT into BP to
introduce a decision mechanism for dynamically se-
lecting events, thereby increasing its expressiveness
and adaptability.
4 BP ⇔ SYMBOLIC MODEL
CHECKING
This section introduces a new method for verifying b-
programs by translating them into the SMV symbolic
specification language (McMillan, 1993). A signif-
icant advantage of this method is its ability to ver-
ify software written in languages like Python, where
the states of the b-threads, modeled as generators,
are not readily clonable (Yaacov, 2023). We evalu-
ate the efficiency of symbolic model checking in BP
programs and compare it with the current best prac-
tices in BP verification, which rely on explicit model
checking, involving an exhaustive enumeration of the
state space.
As in other modeling paradigms, verification is a
subject of considerable work. Some introduced model
checking methodologies and accompanying tools for
verifying safety and liveness properties in behavioral
programs (Harel et al., 2011; Bar-Sinai and Weiss,
2021). Other studies have explored the potential ben-
efits of BP’s compositionality in scalable verification
and its applications (Harel et al., 2013). See also (Qin
et al., 2020) for a similar approach using the BIP
modeling framework. However, previous work on BP
verification primarily concentrated on explicit model
checking. As systems grow in size and complexity,
the limitations of explicit model checking become ap-
parent, necessitating the adoption of symbolic verifi-
cation techniques as an imperative alternative.
BPpy’s symbolic model checker takes a unique
approach by utilizing the inherent compositional-
ity of behavioral programs. It independently ex-
Exploring and Evaluating Interplays of BPpy with Deep Reinforcement Learning and Formal Methods
31

plores the state space of each b-thread and ana-
lyzes the product space symbolically, avoiding the ex-
plicit enumeration of all states. More specifically,
when applying symbolic model checking in BPpy,
b-programs are automatically translated to an SMV
model (McMillan, 1993) and verified symbolically
using PyNuSMV (Busard and Pecheur, 2013). The
translation maps each b-thread to an SMV module,
which reflects the space explored using Depth First
Search (DFS). For instance, consider the module pre-
sented in Listing 3, which represents the add_hot b-
thread in Listing 1. Within each b-thread module,
there exists a local variable called state, capturing
the current state of the b-thread. Additionally, each
module incorporates local Boolean variables for each
event that the associated b-thread may either request
or block. For example, since the add_hot b-thread
requests the HOT event, its corresponding module con-
tains the Boolean variable HOT_requested, which
dynamically changes based on the current state.
MO DUL E add _h ot ( e ve nt )
VAR
st ate : 0 .. 4 ;
HO T_ re qu es t e d : b oo le an ;
IN I T
st ate = 0
AS SIG N
HO T_ re qu es t e d :=
ca s e
st ate = 2 | s t at e = 1 | s t at e = 0 : T R UE ;
st ate = 3 : FA LS E ;
TR U E : FA LS E ;
es a c ;
ne x t ( st at e ) :=
ca s e
ne x t ( ev en t ) = HO T : sta te + 1;
TR U E : st at e ;
es a c ;
Listing 3: The add_hot b-thread translation to SMV.
Listing 4 depicts the main module of the translated
SMV model derived from HOT/COLD b-program
discussed in Section 2. In the translated model, this
main module functions as the event arbiter for the b-
program and implements BP semantics. It initiates
an enumerated variable event, representing the cur-
rently selected event. The event variable can take
any of the events requested across all b-threads, in ad-
dition to two auxiliary events, BPROGRAM_START and
BPROGRAM_DONE, marking the program’s start and end
of execution, respectively. Further, the main module
activates all the b-threads of the program as module
instances. It tracks each b-thread instance, requested
and blocked variables, by using the DEFINE opera-
tor. To capture the b-program’s dynamics, the sys-
tem defines a transition relation that allows the next
event value to be any currently enabled event. If
no such event exists, the b-program terminates, and
the system transitions to a sink state where event =
BPROGRAM_DONE. This setting facilitates the detec-
tion of possible violations related to the termination
of the b-program, such as deadlocks or early termina-
tion scenarios.
MO DUL E main
VAR
ev ent :{ B PR OGR AM _S TA R T , BP R OG RA M_D ON E , HOT , COL D };
bt0 : add _h ot ( e ve n t ) ;
bt1 : add _c ol d ( ev en t );
bt2 : con tr ol ( e ve n t ) ;
IN I T
ev ent = BP RO GR AM _S T A R T
DE FIN E
HO T_ re qu es t e d := bt0 . H O T _ r e qu es te d ;
HO T_ bl oc ke d : = bt2 . H OT _b lo ck ed ;
CO LD _r e q u e s te d := bt1 . C OL D_ re q u e s t ed ;
CO LD _b lo ck ed := b t2 . C OL D_ bl oc ke d ;
HO T_ en ab le d : = H O T _ r eq ue st ed & ! H OT _b lo ck ed ;
CO LD _e na bl ed := CO LD _r eq ue st ed & ! C OL D_ bl oc ke d ;
TR ANS
ne x t ( ev en t ) != B P R O G RA M_ ST AR T & (! HO T_ en ab le d - > n ext (
ev ent ) ! = HOT ) & (! C O L D _ e na bl ed -> ne xt ( e ven t ) !=
CO L D ) & ( H OT _e na bl ed | CO LD _e na bl ed -> n ext ( e ve nt ) !=
BP RO GR AM _D O N E ) & ( eve nt = BP RO GR AM _D ON E - > nex t (
ev ent ) = B P R O GR AM _D ON E )
Listing 4: The translated main module of the HOT/COLD
b-program discussed in Section 2.
We now turn to a performance evaluation for the
aforementioned approach. All programs and tools
used for evaluation in this study are available in the
supplementary material. The evaluation involved sev-
eral b-programs, including 1) The HOT/COLD exam-
ple presented in Section 2 with an increasing num-
ber of portions (N) and cold b-threads (M); 2) The
Dining Philosophers b-program presented in (Elyasaf
et al., 2023); and 3) The Tic-Tac-Toe game presented
in (Elyasaf et al., 2023). For this evaluation, all the
specifications we considered hold (i.e., no violations
are discovered through model checking) to examine
how quickly the various approaches can traverse the
entire search space. We compared the results against
similar b-programs verified using BPjs (Bar-Sinai and
Weiss, 2021), a Java-based tool for running and an-
alyzing behavioral programs written in JavaScript,
which is the current best practice in BP verification.
The symbolic verifier in BPpy can function in two
modes: Binary Decision Diagrams (BDD) and SAT-
based Bounded Model Checking (BMC), where the
model is unrolled for a fixed number of steps and is
checked for violations that can occur within that num-
ber of steps or fewer. We compared these modes to
the BPjs verifier in unbounded and bounded modes,
respectively. The results are available in Table 1.
In terms of memory consumption, both symbolic
model checkers outperformed the explicit verifier, es-
pecially the BDD-based verifier, exhibiting improved
efficiency. This result aligns with expectations, given
that the program’s state space is symbolically rep-
resented through BDDs or logical formulas rather
than being explicitly enumerated. Regarding verifi-
cation time, we observed that the BDD-based model
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
32

Table 1: The average time and memory (over 10 repe-
titions) required to verify b-programs in BPpy and BPjs.
The Binary Decision Diagrams (BDD) and SAT-based
Bounded Model Checking (BMC) modes implemented in
BPpy are compared against the BPjs verifier in unbounded
and bounded modes, respectively.
Unbounded Bounded
time
3
memory
4
time
3
memory
4
N,M |E|
1
|S|
2
BDD BPjs BDD BPjs BMC BPjs BMC BPjs
HOT/
COLD
30,1 2 121 2.9 5.1 0.08 0.24 3.8 5.2 0.09 0.23
60,1 2 122 3.5 5.3 0.08 0.29 5.0 5.3 0.13 0.29
90,1 2 182 4.2 5.6 0.08 0.34 7.9 5.4 0.19 0.36
30,2 3 1022 3.5 10.0 0.08 0.78 5.2 8.4 0.10 1.03
60,2 3 3842 4.4 50.9 0.09 1.21 18.3 22.6 0.18 1.64
90,2 3 8462 5.3 215.6 0.11 1.32 99.1 102.0 0.37 1.65
30,3 4 11437 3.9 398.8 0.08 1.19 5.4 223.9 0.10 1.61
60,3 4 158901 5.1 t.o. 0.11 t.o. 22.7 t.o. 0.20 t.o.
90,3 4 519151 7.4 t.o. 0.13 t.o. 121.5 t.o. 0.46 t.o.
Dining
Phil.
3,- 12 106 4.6 6.1 0.12 0.29 5.5 4.5 0.08 0.25
6,- 36 30862 t.o. 56.8 t.o. 0.97 8.0 5.0 0.09 0.30
9,- 54 3299501 t.o. o.m. t.o. o.m. 11.2 5.8 0.10 0.36
TTT 3,- 21 69502 t.o. 1852.1 t.o. 10.01 26.1 750.6 0.15 7.98
1
the number of program events,
2
the number of program states,
3
in sec-
onds,
4
in GB, o.m. out of memory (16GB), t.o. timeout (60 minutes)
checker excelled in the examples where the total num-
ber of events remained relatively small. However,
as the number of events increased, the verification
time for the BDD-based model checker experienced
a significant surge. Conversely, when considering
the bounded option, BMC demonstrated greater re-
silience to a growing number of events in the b-
program, positioning itself as a more robust approach.
The translation of B-programs into SMV mod-
els, utilizing their inherent compositionality, shows
promise for achieving scalability and efficiency in
verification. Our future research will focus on en-
hancing the translation process to improve the veri-
fication of programs with a larger number of events.
Also, we aim to extend the symbolic model checking
support to various execution mechanisms and proto-
cols, including the one outlined in Section 3.
5 BP ⇔ PROBABILISTIC
MODELING
This section discusses BP as a modular language for
modeling and analyzing probabilistic systems, en-
hancing its semantics for compositional modeling of
probabilistic and non-deterministic behaviors. Tradi-
tionally, randomness in BP is introduced through a
random function for event selection, with the sync
node’s standard event selection protocol being an
example. However, this is limited as it only al-
lows uniform distributions. Since we want to al-
low non-uniform distribution, we take the alternative
approach of allowing a random behavior of the b-
threads. We want to define randomness in a way that
allows both execution (sampling) and model check-
ing. This poses a non-trivial challenge because, dur-
ing model checking, the analysis needs to consider
all possible paths with their probabilities. Thus, we
introduce the choice idiom, illustrated in Listing 5,
where a dictionary maps values to probabilities for
defining categorical distributions in b-threads. These
distributions can be sampled during the execution of
a b-program or transformed for analysis.
def co in _f li p () :
si d e = y i el d c ho ice ({ " he ads " : 0.4 , " t ai ls " : 0.6 })
yi eld sy n c ( r e qu es t = BE ve nt ( s ide ) )
Listing 5: Uneven coin flip using the choice statement.
The proposed BP model combines non-
determinism and probability for different modeling
purposes. Non-determinism is handled through sync
points with multiple events, while probabilities are
specified using choice. Non-determinism arises in
systems when there is a decision to make. Prob-
abilities are used to model uncontrolled random
events. Thus, during analysis, non-determinism
is typically addressed by analyzing contingencies,
while probabilities are computed for each path.
Executing programs with choice statements in-
volves random selection based on a specified dis-
tribution, facilitating naive sampling. Model anal-
ysis is done by translation into the PRISM lan-
guage (Kwiatkowska et al., 2011), a tool for analyzing
probabilistic systems with a module-based approach.
The translation process, largely similar to the one dis-
cussed for SMV in Section 4, has been automated
and integrated into BPpy. Supplementary material in-
cludes technical details about this process, code, and
documentation. We utilize the mdp model type in
PRISM to analyze systems that involve a combination
of non-determinism and probabilistic behavior.
We compared sampling and formal analysis to
evaluate translation performance. Experiments timed
the analysis of parametrized versions of three mod-
els. Sampling involved running models repeatedly
and monitoring outcomes. Formal verification trans-
lated the model into PRISM format and verified it us-
ing Storm probabilistic model checker (Hensel et al.,
2022). All programs and tools used for this evaluation
can be found in the supplementary material.
The first model, the classic Monty Hall problem,
which is infamous for its counter-intuitive solution,
is described as follows: “A game host hides a prize
behind one of three doors. The contestant guesses
which door has the prize. The host then opens one
Exploring and Evaluating Interplays of BPpy with Deep Reinforcement Learning and Formal Methods
33
door with no prize. The contestant can stick with
their choice or switch.” Our evaluation parameter-
ized the total number of doors, prizes, and doors
ruled out, as proposed in (Depuydt and Gill, 2012).
The model presented in Listing 6 consists of three
b-threads. The first b-thread, named hide_prizes,
determines where to hide prizes, requests the hiding
events, blocks the opening of the doors with hidden
prizes until the opening phase is complete, and waits
for the contestant to open a door. It checks if the cho-
sen door contains a prize and accordingly announces
a win or lose event. We added the repeat, replace
, and sorted parameters to the choice statement to
ease the use of the idiom in cases where repeated sam-
pling is required. The make_a_guess b-thread waits
for the end of the hiding phase, guesses a door, and
then blocks its opening. The open_doors b-thread
waits for the guess and then requests to open doors
while blocking the already opened doors. Then, it re-
quests the event that marks the end of the host door
opening phase and the event for the door the contes-
tant eventually opens.
@t hr ead
def hi de _p ri ze s ( doo rs , p ri ze s_ nu m ):
pr ize s = y iel d c ho ic e ({ i : 1/ len ( d oor s ) fo r i in doo rs } ,
re pea t = p r iz es_ nu m , r ep la ce = Fa l se , s ort ed = T rue )
for hid e in pri ze s :
yi eld sy n c ( r e qu es t = BE ve nt ( f" hid e { hid e }" ) )
yi eld sy n c ( r e qu es t = BE ve nt ( " d on e_ hi di ng " ) )
do nt _o pe n = [ B Ev en t (f " op en { d} " ) f or d in p ri ze s ]
yi eld sy n c ( bl oc k = don t_ o pe n , w a it Fo r = BE ve nt ( " d on e_ op en in g " )
do o r = y i el d s ync ( w ai tF or = a ll _o pe n )
yi eld sy n c ( r e qu es t = BE ve nt ( " win " if int ( d o or . n ame [4 :]) in
pr ize s else " los e ") )
@t hr ead
def ma ke _a _ g u e s s () :
yi eld sy n c ( w a it Fo r = BE ve nt ( " d on e_ hi di ng " ) )
yi eld sy n c ( r e qu es t = BE ve nt ( f" gue ss {0} " ))
yi eld sy n c ( bl oc k = BE ven t ( f" o pen {0} " ) )
@t hr ead
def op en _d oo rs ( d oors , do or s_ op en ed _ n u m ) :
yi eld sy n c ( w a it Fo r =[ BE v en t ( f " g ues s {d } ") f or d in d oo rs ])
bl oc ked = []
for _ i n ra nge ( do or s_ o p e ne d_ nu m ) :
e = y ie ld syn c ( re qu e st = all _op en , b lo c k = b lo c ke d )
bl oc ked += [ e]
yi eld sy n c ( r e qu es t = BE ve nt ( " d on e_ op en in g " ))
yi eld sy n c ( r e qu es t = al l_o pen , blo ck = b lo cke )
Listing 6: A BPpy model of the Monty Hall problem.
The experiment included generating instances of
the b-program from Listing 6 for all parameter combi-
nations up to 10 doors. For sampling, we executed the
program 10,000 times to track the win event occur-
rence and used PRISM and Storm for model checking
to calculate the probability of reaching the win state.
The analysis time is the entire duration of Storm.
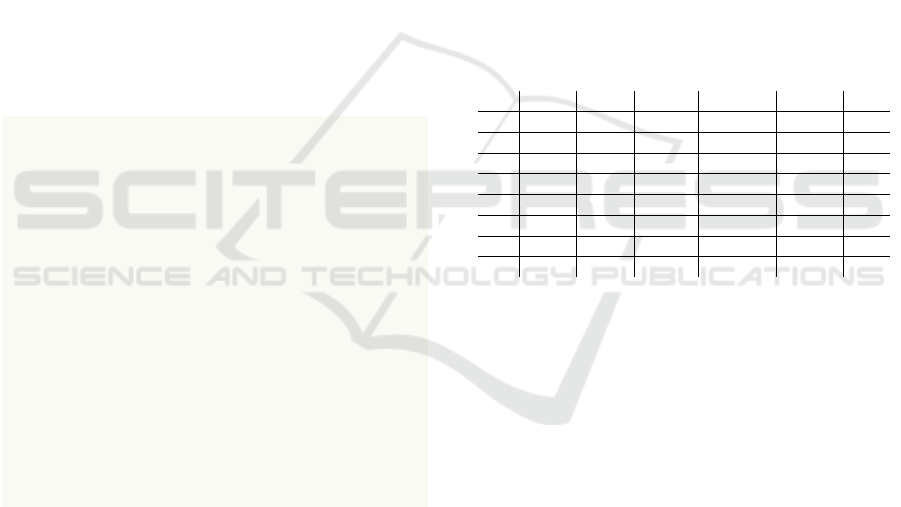
The results of applying two analysis methods to
the Monty Hall model with different parameter values
are shown in Figure 3. The blue line and halo depict
the mean and standard error of collected samples over
time. The dashed orange line shows the exact com-
putation value, and the orange circles mark the time
of translation to PRISM and the subsequent analysis.
These findings indicate that exact analysis yields re-
sults before sampling variance reaches acceptable er-
ror margins in all examined cases.
Table 2 provides a breakdown of the runtime for
the exact analysis in the proposed approach for the
Monty Hall model with 10 doors, distinguishing be-
tween PRISM model construction and Storm analy-
sis. An expected correlation exists between the time
spent on model translation and overall computation
time. The primary source of complexity appears to be
the number of doors opened, as the modeling process
times out entirely after 6 doors. This is likely due to
numerous different paths that do not merge, unlike the
situation with the number of prizes.
Table 2: Runtime in seconds for exact analysis with various
parameter combinations for the Monty Hall model with 10
doors. The table presents PRISM model construction times
on the left and Storm analysis times on the right.
Opened
Prizes 1 2 3 4 5 6
1 0.6/0.1 1.1/0.5 9.4/8.4 114.7/536.3 4120.6/t.o. t.o./t.o.
2 2.2/1.3 4.1/3.8 8.7/46.0 112.0/1401.4 3798.0/t.o. t.o./t.o.
3 6.5/5.9 7.6/18.3 13.2/136.3 122.1/t.o. 4376.5/t.o. t.o./t.o.
4 13.9/19. 15.5/52.8 21.0/252.7 123.3/t.o. 3874.2/t.o.
5 21.1/29.4 22.2/64.2 28.6/197.2 135.5/t.o.
6 17.8/19.9 18.2/34.5 24.7/77.5
7 10.1/6.4 10.9/8.4
8 8.3/1.4
t.o. timeout (two hours)
Our second evaluation involves modeling a fair
n-sided dice using fair coins, following Knuth’s al-
gorithm (Knuth, 1976) featured in PRISM. This al-
gorithm uses rejection sampling to minimize the ex-
pected coin tosses by simulating a uniform distribu-
tion over powers of two with fair coins. For example,
in the case of a six-sided die (see Figure 4), three coin
tosses yield 8 possibilities. If the resulting value of
the tosses is smaller than six, the algorithm accepts
it. Otherwise, the algorithm repeats the process as if
starting with the remainder. More complex cases may
involve multiple trees for simulation.
The BP model for this algorithm tracks coin flips
through b-threads representing nodes in the sequence.
Each node waits for its parent. Then, depending on
its place in the tree, it either returns the dice value or
performs a toss and requests the corresponding next
node. This results in a simple model where all b-
threads can be generated by a single function shown
in Listing 7.
Results from the dice program analysis in Table 3
and Figure 5 align with our observations from smaller
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
34
0 2 4
6
0.62
0.64
0.66
0.68
0.7
Finished translation to PRISM
and computation
Time (s)
Sampling mean
Standard error
Sampling mean
Exact probability
(a) d = 3, p = 1, o = 1.
0 2 4
6
8 10 12
0.2
0.22
0.24
0.26
0.28
0.3
Finished translation
to PRISM
Finished
computation
Time (s)
Standard error
Sampling mean
Exact probability
(b) d = 9, p = 2, o = 1.
0 10 20 30 40
50
0.82
0.84
0.86
0.88
0.9
0.92
Finished translation
to PRISM
Finished
computation
Time (s)
Standard error
Sampling mean
Exact probability
(c) d = 8, p = 4, 0 = 3.
0 20 40
60
80 100 120
0.6
0.62
0.64
0.66
0.68
Finished translation
to PRISM
Finished
computation
Time (s)
Standard error
Sampling mean
Exact probability
(d) d = 10, p = 5, 0 = 2.
Figure 3: A comparison of the sampling-based analysis and the exact analysis for the Monty Hall model with different values
of doors (d), prizes (p), and doors opened (o)..
1,0
2,0
4,0
8,0 8,1
4,1
8,2 8,3
2,1
4,2
8,4 8,5
4,3
8,6 8,7
Figure 4: An illustration of the process simulating a six-
sided dice using coin flips.
@t hr ead
def nod e (u , x ) : # u : lay er si ze , x : in dex in l aye r
wh ile Tr u e :
yi eld sy n c ( w a it Fo r = BE ve nt ( f" n {u } _{ x} " ))
if u < n : # i nne r n ode
fl i p = y i el d c ho ice ({ 0:0 .5 , 1 :0. 5} )
yi eld sy n c ( r e qu es t = BE ve nt ( f" n {u * 2} _ {2* x + fl ip } ")
el s e : # l ast la ye r
if x >= n :
yi eld sy n c ( r e qu es t = BE ve nt ( f" n {u - n} _{ x %n } ") )
el s e :
yi eld sy n c ( r e qu es t = BE ve nt ( f" re sul t_ { x }" ) )
Listing 7: B-thread definition of any single node in the BP
model of Knuth’s algorithm (Knuth, 1976).
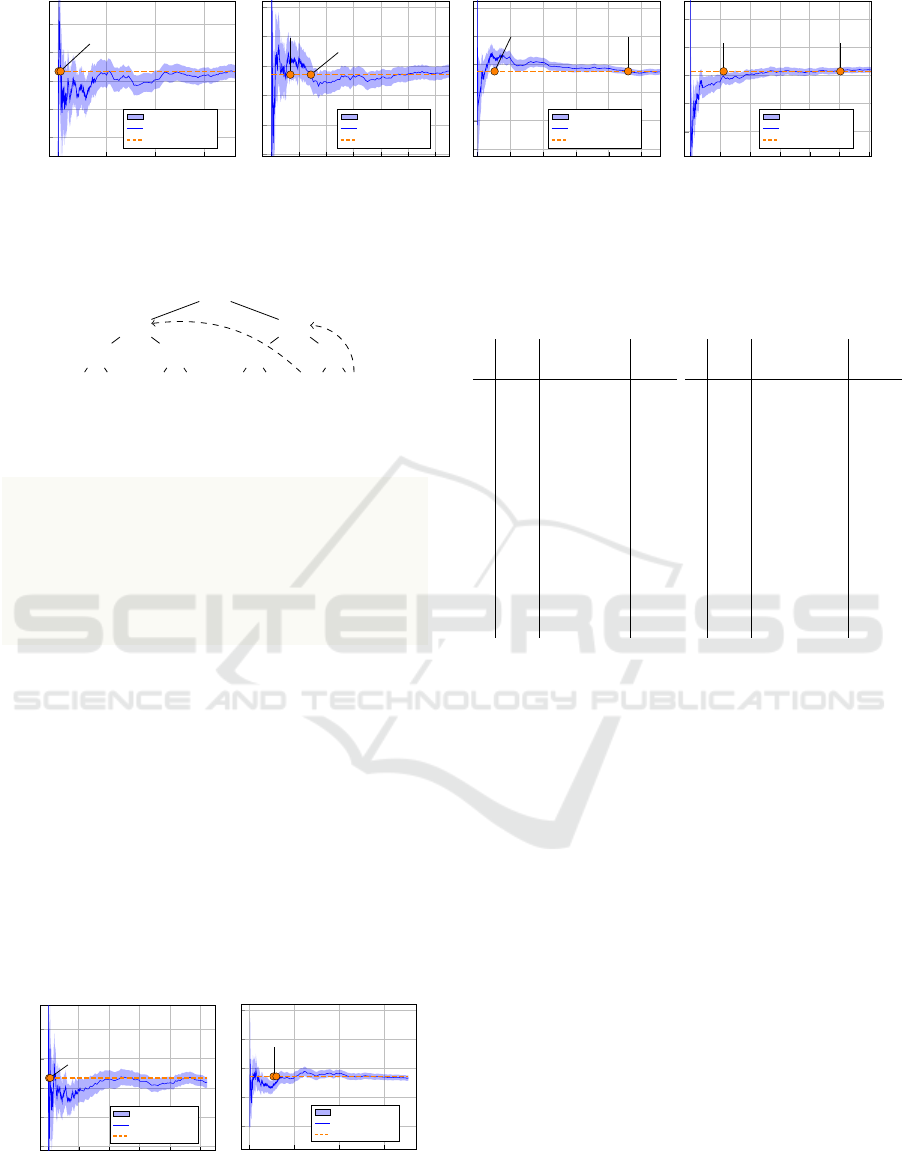
Monty Hall versions, where the exact analysis outper-
forms sampling. One difference from the previous ex-
ample was that translation, rather than computation,
was the more time-consuming part of the exact analy-
sis due to more b-threads and fewer commonly shared
events. This example is notable due to the unlimited
number of times it may repeat before yielding a re-
sult, making it particularly suited for exact analysis,
which explores the full possibility space simultane-
ously. We can observe that in more complex cases
like Figure 5b, the exact analysis still performs well
due to oversampling advantages.
0
5
10
15
20
25
0.12
0.14
0.16
0.18
0.2
Finished translation to PRISM
and computation
Time (s)
Sampling mean
Standard error
Sampling mean
Exact probability
(a) n = 6.
0
500
1,000
1,500
0
0.02
0.04
0.06
0.08
Finished translation to PRISM
and computation
Time (s)
Standard error
Sampling mean
Exact probability
(b) n = 29.
Figure 5: Comparison of the sampling-based and exact
analysis for the n-sided dice model.
Table 3: Exact analysis of various sizes for a dice. Some
require multiple trees which repeat the same structure.
n States
Trans./Comp.
time (s)
Result n States
Trans./Comp.
time (s)
Result
6 64 0.129/0.21 0.1667 19 1868 46.931/6.056 0.0526
7 68 0.141/0.053 0.1429 20 512 3.179/0.418 0.05
8 38 0.132/0.053 0.125 21 440 3.009/0.399 0.0476
9 292 1.361/0.214 0.1111 22 1200 20.060/2.451 0.0455
10 216 0.821/0.147 0.1 23 968 12.796/1.522 0.0435
11 596 5.095/0.635 0.0909 24 376 1.592/0.233 0.0417
12 168 0.423/0.097 0.0833 25 2744 101.133/12.561 0.04
13 848 9.941/1.191 0.0769 26 1704 39.804/5.134 0.0385
14 144 0.440/0.097 0.0714 27 2668 96.446/12.325 0.0370
15 148 0.443/0.099 0.0667 28 368 1.664/0.239 0.0357
16 78 0.451/0.097 0.0625 29 4448 265.348/33.184 0.03448
17 752 8.300/0.999 0.0588 30 304 1.705/0.237 0.03333
18 592 5.272/0.663 0.0556
Our last case study is a variation of the bit-flip sce-
nario discussed in Section 3. In this variation, diago-
nals are initiated randomly, and the actions are taken
at each step, where each consecutive row or column
can be flipped. The goal here is to find a sequence
that results in the board having the same (or as close
as possible for odd-size boards) number of bits turned
on and off.
The translation part in the exact analysis of the
bit-flip model was more challenging than in previous
cases, starting at relatively small matrix sizes. This
is due to the large number of board configurations in
this scenario. Each of the possible 2
n×m
possibilities
adds both an event and a state in each b-thread, re-
sulting in an exponential number of options that must
be explored in all of the b-threads during translation.
However, when considering all b-threads as a unified
b-program during exact analysis, the number of pos-
sible outcomes is relatively small.
We conducted a sampling-based analysis by mea-
suring 9, 999 runs or as many as possible within an
hour, as seen in Table 4. Sampling outperformed ex-
act analysis, supporting double the translation’s grid
size before slowing down. We suspect the difficul-
ties stem from the sync events being a product of rel-
atively costly computations. Section 3 and Section 7
Exploring and Evaluating Interplays of BPpy with Deep Reinforcement Learning and Formal Methods
35

present an alternative analysis approach to the discrete
event selection mechanism used here by integrating
SMT solvers, which aims to address this issue.
Table 4: Sampling results of the discrete bit-flip model with:
average, standard measurement error, number of samples
(Samp.), and average time per sample in seconds (Time).
Dim Mean SEM Sam. Time Dim Mean SEM Sam. Time
2x2 0.263 0.004 9999 0.002 3x3 0.441 0.005 9999 0.023
2x3 0.264 0.004 9999 0.004 3x4 0.178 0.004 9999 0.295
2x4 0.309 0.005 9999 0.008 3x5 0.329 0.014 1062 3.39
2x5 0.309 0.005 9999 0.041 3x6 0.197 0.052 61 59.934
2x6 0.241 0.004 9999 0.237 3x7 0.4 0.25 5 885.183
2x7 0.124 0.007 2476 1.454 4x4 0.209 0.024 292 12.34
2x8 0.081 0.013 456 7.903 4x5 0.143 0.167 7 554.663
2x9 0.13 0.051 46 79.496
The presented examples cover a wide range of
parameter values and diverse model types, spanning
from models with few states and minimal transitions,
such as the dice problem, to highly interconnected
ones in bit-flip. Our methods show promise in differ-
ent problem domains, especially in smaller systems.
Modeling probabilistic systems with both non-
deterministic and probabilistic behavior has been ad-
dressed in various ways previously. Some mod-
els focus on representing systems with probabilis-
tic transitions (Puterman, 1990; Stoelinga, 2004),
while others are designed to represent systems with
non-deterministic choices (Rabin and Scott, 1959;
Savitch, 1970). For systems exhibiting both non-
deterministic and probabilistic behavior, models such
as PRISM (Kwiatkowska et al., 2011) are commonly
used. These models allow for a rich representation of
system dynamics, enabling the analysis and verifica-
tion of system properties. The advantages of model-
ing randomness in BP have not been explored before.
The only reference to randomness we know of is in
event selection strategies (Harel et al., 2010).
6 BP ⇔ DRL
This section explores the interplay between BP and
deep reinforcement learning (DRL), focusing on how
it can enhance the alignment of requirements with BP
modules for more effective execution. We illustrate
how DRL’s advanced data processing and interpreta-
tion abilities can aid in designing complex systems
in BP. Subsequently, we discuss how BP’s structured
way of encoding rich behavioral specifications can
enhance DRL-driven solutions. This is demonstrated
using BPpy’s integration with Gymnasium (Towers
et al., 2023), a widely recognized API standard for
reinforcement learning (RL) environments.
The combination of RL and BP was first intro-
duced by (Eitan and Harel, 2011), which enhanced
the semantics of live sequence charts (LSC), a visual
language for BP, by incorporating reinforcements and
applying learning algorithms. In recent years, this
combination has gained growing interest, with several
studies conducted with the assistance of BPpy. These
studies explored different ways this learning mecha-
nism can be combined with BP’s execution (Elyasaf
et al., 2019; Yaacov et al., 2024).
To illustrate how DRL can enhance the efficiency
of execution mechanisms in BP, we begin with an
evaluation of the Blueberry Pancake Maker exam-
ple presented in (Bar-Sinai, 2020). In this exam-
ple, a pancake batter is made from dry and wet
mixtures using a mixer controlled by a b-program.
The first two b-threads in Listing 8 prepare batter
for n pancakes by adding n mixtures without spec-
ifying the order, which can lead to improper bat-
ter thickness. To prevent damage to the mixer,
we need to control the order of mixture additions.
The thickness_meter b-thread monitors thickness
changes, while the range_arbiter b-thread ensures
the thickness stays within [−b, b]. Next, we add
blueberries to the mix. To prevent the blueber-
ries from bursting during the mixing process, 75%
of the total mixture of batter should be added, and
the batter itself should be relatively thin. The b-
threads enough_batter and batter_thin_enough
block the blueberry addition event until these condi-
tions are met. Depending on the sequence in which
the dry and wet mixtures are added, scenarios may
arise where the AddBlueberries event, requested
by the blueberries b-thread, remains blocked by
batter_thin_enough throughout the program’s ex-
ecution. Such a situation would inevitably violate the
system requirements, as it would result in a pancake
mixture with no blueberries.
To address the risk of missing blueberries, one op-
tion is to define a specific sequence for their addition.
However, this becomes progressively more compli-
cated with larger systems and various requirements.
For instance, if dry and wet mixtures are not con-
sistently ready for addition, determining a strict se-
quence becomes more challenging and prone to er-
rors. Thus, our aim is to design flexible b-programs
to allow for all valid behaviors.
To address the complexity in specifying that blue-
berries must eventually be added, we used the in-
tegration between BPpy and Gymnasium introduced
in (Yaacov, 2023). This integration encapsulates a b-
program as an RL environment, allowing developers
to delineate the program’s target objectives or opti-
mization criteria by incorporating the localReward
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
36

@t hr ead
def a d d _d ry _m ix tu re (n ) :
for i i n ra nge ( n ):
yi eld sy n c ( r e qu es t = D ry Mi xt u re () )
@t hr ead
def a d d _w et _m ix tu re (n ) :
for i i n ra nge ( n ):
yi eld sy n c ( r e qu es t = W et Mi xt u re () )
@t hr ead
def t h i ck ne ss _m et er () :
wh ile Tr u e :
e = y ie ld syn c ( wa it F or = mi xt ur e_ ad d )
if e == Dry Mi xt ur e () :
yi eld sy n c ( r e qu es t = T hi ck ne ss Up () , blo ck = mi xt ur e_ ad d )
el s e :
yi eld sy n c ( r e qu es t = Th ic kn ess Do wn , bl ock = mi xt ur e_ ad d )
@t hr ead
def ra n g e _ a rb it er ( b ):
th ic kn es s = 0
wh ile Tr u e :
e = y ie ld syn c ( wa it F or = an y_ th ic k )
th ic kn es s += 1 if e == Th ic kn es sU p () els e -1
if a b s ( th ic kn es s ) >= b :
bl oc k_e = Dr yM ix tu re () if thi ckn ess >0 els e W et Mi xt ur e ()
yi eld sy n c ( bl oc k = blo ck_e , w ait Fo r = m ix tu re _a dd )
el s e :
yi eld sy n c ( w a it Fo r = m ix tu re _a dd )
@t hr ead
def bl ue be rr ie s ( ) :
yi eld sy n c ( r e qu es t = A dd Bl ue be rr i e s ( ) )
@t hr ead
def en o u g h _ ba tt er ( n ):
for j i n ra nge ( i nt (( n * 3) / 2) ):
yi eld sy n c ( w a it Fo r = mi xt ure _a d d , b lo ck = A dd Bl u e b e r ri es () )
@t hr ead
def b a t te r_ th in _ e n ou gh ( n ):
th ic kn es s = 0
wh ile Tr u e :
if t hi ck ne ss >= 0:
e= yie ld syn c ( wa it For = an y _t h ic k , bl oc k = A dd Bl ue be rr ie s () )
el s e :
e= yie ld syn c ( wa it For = an y_ th ic k )
th ic kn es s += 1 if e . na me == " T hi ck ne ss Up " el s e -1
Listing 8: The Blueberry Pancake Maker b-program (Bar-
Sinai, 2020).
parameter. This parameter can be integrated into
any yield statement, complementing traditional re-
quirements and facilitating learning through RL algo-
rithms. Embedding these reward-based criteria within
BPpy streamlines the modeling of intricate systems,
fostering more intuitive and efficient development
practices. Listing 9 demonstrates how rewards are
added to the blueberries b-thread, reflecting the
system’s preference for eventually adding blueberries.
@t hr ead
def bl ue be rr ie s ( ) :
yi eld sy n c ( r e qu es t = A dd Bl ue be rr i e s ( ) , lo ca lR ew ar d = - 0 .0 0 01 )
yi eld sy n c ( w a it Fo r = All () , lo ca lR ew ar d =1)
Listing 9: The updated blueberries b-thread which the
localReward parameter.
Our evaluation focused on the task of finding a
deterministic event selection mechanism to generate
a single execution trace adhering to system require-
ments. We compared two mechanisms. The first uses
a DRL algorithm, wherein the state space is repre-
sented by local variables of the b-threads, serving as
input to the agent’s neural network. The learning al-
gorithm was aborted upon successful task completion,
producing a correct sequence of events in its predic-
tions. Specifically, we employed the Maskable PPO
algorithm (Huang and Onta
˜
n
´
on, 2022) implemented
in the Stable Baselines3 package (Hill et al., 2018),
with a standard multilayer perception (MLP) network
with two hidden layers of size 64. The second mecha-
nism we evaluated uses an explicit program synthesis
approach, in which a valid execution trace is found by
exploring the program’s state space. This is consid-
ered the current standard approach, as it has been dis-
cussed previously, and is supported by existing tools.
The runtime and memory usage of the two mech-
anisms for finding a single execution trace are pre-
sented in Table 5. Tests were conducted with n ∈
{200, 300, 400, 500} and b ∈ {25, 50, 75, 100}. As ex-
pected, the runtime and memory of the synthesis ap-
proach increase with the problem size, especially n.
In contrast, the DRL approach’s runtime and memory
remain relatively stable. This can be attributed to the
fact that increasing n and b doesn’t change the num-
ber of program variables, keeping the neural network
complexity constant. This demonstrates that DRL can
be particularly beneficial when system complexity is
due to variable value range rather than quantity.
Table 5: Comparison of average (over 10 repetitions) of
runtime and memory of the DRL and program synthesis ap-
proaches for finding a single valid execution trace.
Time
1
Memory
2
Time
1
Memory
2
n b DRL Syn. DRL Syn. n b DRL Syn. DRL Syn.
200
25 17 123 1.79 0.06
400
25 16 555 1.79 0.11
50 19 142 1.79 0.06 50 18 569 1.79 0.12
75 19 149 1.79 0.06 75 16 558 1.79 0.12
100 18 163 1.79 0.06 100 17 591 1.79 0.12
300
25 16 333 1.79 0.08
500
25 15 894 1.79 0.15
50 20 312 1.79 0.08 50 18 927 1.79 0.15
75 19 339 1.79 0.09 75 19 873 1.79 0.15
100 20 333 1.79 0.09 100 16 903 1.79 0.16
1
in seconds,
2
in GB
We also evaluated the Cinderella-Stepmother
problem from Section 3. In this variation, the DRL
mechanism needs to effectively handle a counter-
strategy of the stepmother described in (Shevrin
and Yossef, 2020), where in each round, the step-
mother maintains two buckets, which Cinderella can-
not empty at once, evenly filled. Once the stepmother
reaches a round in which one of the buckets can be
entirely filled, it does so and wins. The results of this
example experiment are provided as an appendix in
the supplementary material. The evaluation yielded
results similar to the pancake maker example. The ap-
pendix also contains early results for the task of find-
Exploring and Evaluating Interplays of BPpy with Deep Reinforcement Learning and Formal Methods
37
0 0.2 0.4
0.6
0.8 1
·10
5
16
18
20
22
24
Learning time steps
Mean Reward
PPO
Random
Greedy
(a) 3 × 3.
0
0.5
1
1.5
2
·10
5
20
30
40
50
60
Learning time steps
PPO
Random
Greedy
(b) 4 × 4.
0
0.5
1
1.5
2
2.5
3
·10
5
40
50
60
70
80
Learning time steps
PPO
Random
Greedy
(c) 5 × 5.
0 1 2 3 4
·10
5
60
80
100
Learning time steps
PPO
Random
Greedy
(d) 6 × 6.
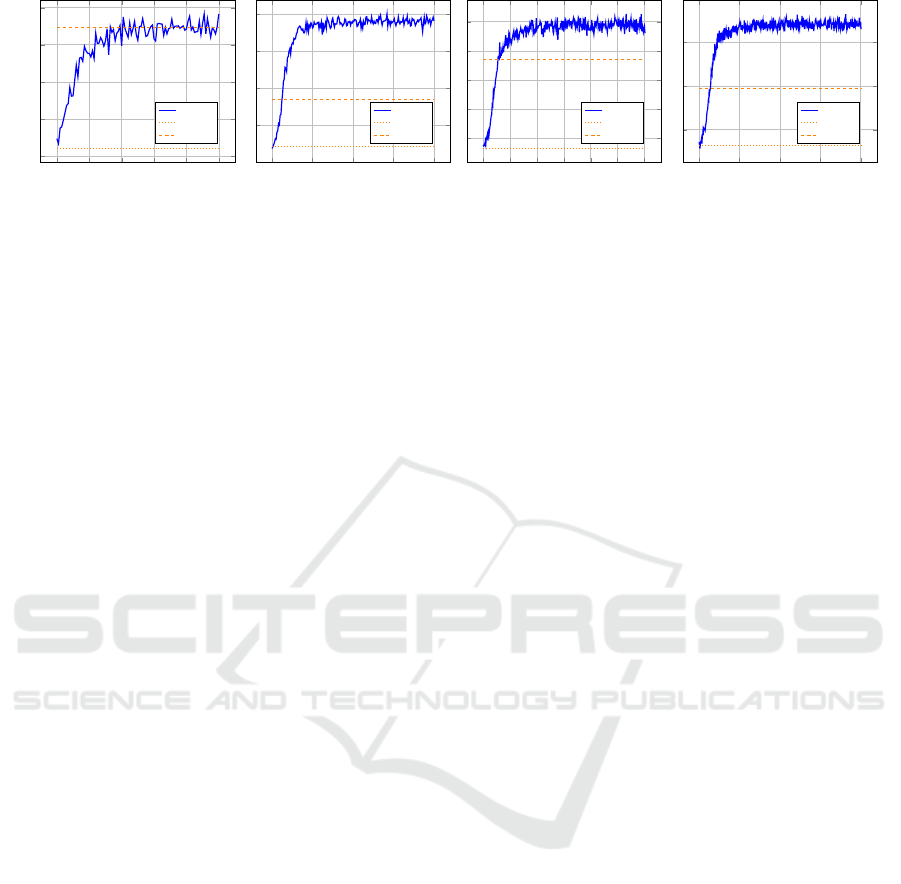
Figure 6: Mean reward of the PPO algorithm for the bit-flip two-player game on square matrices of sizes 3 × 3, 4 × 4, 5 × 5,
and 6 × 6. The results are compared with random and greedy baseline strategies.
ing a non-deterministic event selection mechanism
that adheres to system requirements for the two ex-
amples. The results show that in both cases, the al-
gorithms converged to accurate strategies after a short
training time.
The evolving DRL field presents challenges in
the safety, robustness, and interpretability of poli-
cies. Previous research suggests using BP to encode
expertise for enhancing training and system reliabil-
ity (Yerushalmi et al., 2023; Ashrov and Katz, 2023).
We note that BPpy supports knowledge encoding by
modifying rewards, features, and actions before re-
laying them to the learning algorithm or environment,
enhancing system safety and ease of training.
7 BP ⇔ (DRL+Probabilities+SMT)
In the previous sections, we saw four integrations of
BP with other mechanisms. As our vision is to use
BP as a unifying modeling language suited for com-
bining these methods, we demonstrate the interplay of
the different mechanisms described in the preceding
sections. Specifically, we show how the integrations
with SMT solvers, probabilistic modeling, and DRL
can be used together to create a comprehensive envi-
ronment that facilitates both modeling and analysis.
For this demonstration, we use a variation of the
bit-flip problem described earlier: A two-player game
over a Boolean matrix of dimensions N × M. The ini-
tial state of the matrix resembles a chessboard with
alternating positive and negative bits. Our opponent
randomly flips rows and columns, while our objec-
tive is to devise a strategy that involves strategically
flipping rows or columns to turn on as many bits as
possible simultaneously. We can randomly flip bits
or implement a greedy strategy that selects the row or
column with the highest number of bits to turn on in
each round. However, as we will demonstrate later, a
better strategy that is more challenging to implement
manually can be achieved using DRL.
Section 3 and Section 5 demonstrate how the dis-
crete implementation of the problem can be challeng-
ing for execution and analysis as the matrix size in-
creases. This section uses a solver-based implemen-
tation combined with the choice idiom presented in
Section 5 to model the opponent’s behavior. The
complete program used for the following evaluation,
along with a description of the code, is available in an
appendix in the supplementary material.
We ran the PPO algorithm (Huang and Onta
˜
n
´
on,
2022) to learn a strategy for the task. The learned
strategy was compared against two baseline strate-
gies. The first strategy randomly selects rows and
columns to flip, while the second greedily selects the
row/column with the highest number of bits to turn
on in each round. The mean expected reward of these
strategies was computed using the choice idiom. Re-
sults are presented in Figure 6. We observe that the
PPO algorithm rapidly obtained a strategy that can
plan ahead and achieve better (or equal in the 3 × 3
case) results than the greedy approach in all matrix
sizes examined.
The bit-flip demonstration shows how BP can
serve as a “Swiss army knife” for modeling and anal-
ysis: Starting with a problem that was challenging
to execute in a discrete program and upgrading it to
utilize solvers. Subsequently, DRL can be applied to
achieve a more effective strategy, and it can be evalu-
ated and compared using probabilistic analysis.
The integration of SMT, probabilistic model
checking, DRL, and BP holds great potential, as
the first three are already closely linked. Many
probabilistic model checking problems are solved
using SMT-based constraint solving or linear opti-
mization, while DRL algorithms address scalability
issues in these problems. Tools like PRISM and
STORM demonstrate this synergy, combining solvers
and DRL. Extending this integration to BP could en-
able adaptive decision-making with formal guaran-
tees for complex systems.
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
38

8 CONCLUSION
In conclusion, our study focused on integrating BP
with a variety of techniques to establish a compre-
hensive framework for specifying and analyzing re-
active systems. Moving forward, our future work will
delve deeper into use cases involving multiple inte-
grations and explore more complex and extensive ex-
amples. Additionally, we plan to focus on evaluating
the usability of our proposed framework and assess
how well it aids in programming to increase adoption
and enhance accessibility.
ACKNOWLEDGEMENTS
This work of Weiss, Yaacov, and Zisser was partially
supported by funding from the Israel Science Founda-
tion (ISF) grant number 2714/19. The work of Ashrov
and Katz was partially funded by the European Union
(ERC, VeriDeL, 101112713). Views and opinions ex-
pressed are however those of the author(s) only and
do not necessarily reflect those of the European Union
or the European Research Council Executive Agency.
Neither the European Union nor the granting author-
ity can be held responsible for them.
REFERENCES
Anderson, M. and Feil, T. (1998). Turning lights out with
linear algebra. Mathematics Magazine.
Ashrov, A. and Katz, G. (2023). Enhancing Deep Learning
with Scenario-Based Override Rules: a Case Study.
In MODELSWARD.
Bar-Sinai, M. (2020). Extending Behavioral Programming
for Model-Driven Engineering. PhD Thesis, Ben-
Gurion University of the Negev, Israel.
Bar-Sinai, M. and Weiss, G. (2021). Verification of Live-
ness and Safety Properties of Behavioral Programs
Using BPjs. In Leveraging Applications of For-
mal Methods, Verification and Validation: Tools and
Trends.
Bar-Sinai, M., Weiss, G., and Shmuel, R. (2018). BPjs:
an extensible, open infrastructure for behavioral pro-
gramming research. In MODELS.
Bodlaender, M. H. L., Hurkens, C. A., Kusters, V. J., Staals,
F., Woeginger, G. J., and Zantema, H. (2012). Cin-
derella versus the wicked stepmother. In Theoretical
Computer Science.
Busard, S. and Pecheur, C. (2013). PyNuSMV: NuSMV as
a Python Library. In NASA Formal Methods.
De Moura, L. and Bjørner, N. (2008). Z3: An efficient SMT
solver. In TACAS.
Depuydt, L. and Gill, R. D. (2012). Higher Variations of the
Monty Hall Problem (3.0 and 4.0) and Empirical Def-
inition of the Phenomenon of Mathematics, in Boole’s
Footsteps, as Something the Brain Does. Advances in
Pure Mathematics, 02.
Eitan, N. and Harel, D. (2011). Adaptive behavioral pro-
gramming. In ICTAI.
Elyasaf, A. (2021). Context-Oriented Behavioral Program-
ming. Information and Software Technology, 133.
Elyasaf, A., Sadon, A., Weiss, G., and Yaacov, T. (2019).
Using Behavioural Programming with Solver, Con-
text, and Deep Reinforcement Learning for Playing a
Simplified RoboCup-Type Game. In MODELS.
Elyasaf, A., Yaacov, T., and Weiss, G. (2023). What Petri
Nets Oblige us to Say: Comparing Approaches for
Behavior Composition. IEEE Transactions on Soft-
ware Engineering, 49.
Harel, D., Kantor, A., Katz, G., Marron, A., Mizrahi, L.,
and Weiss, G. (2013). On composing and proving the
correctness of reactive behavior. In EMSOFT.
Harel, D., Lampert, R., Marron, A., and Weiss, G. (2011).
Model-checking behavioral programs. In EMSOFT.
Harel, D., Marron, A., and Weiss, G. (2010). Programming
Coordinated Behavior in Java. In ECOOP.
Harel, D., Marron, A., and Weiss, G. (2012). Behavioral
programming. Communications of the ACM, 55.
Hensel, C., Junges, S., Katoen, J.-P., Quatmann, T., and
Volk, M. (2022). The probabilistic model checker
Storm. International Journal on Software Tools for
Technology Transfer, 24.
Hill, A., Raffin, A., Ernestus, M., Gleave, A., Kanervisto,
A., Traore, R., Dhariwal, P., Hesse, C., Klimov, O.,
Nichol, A., Plappert, M., Radford, A., Schulman, J.,
Sidor, S., and Wu, Y. (2018). Stable Baselines.
Huang, S. and Onta
˜
n
´
on, S. (2022). A Closer Look at Invalid
Action Masking in Policy Gradient Algorithms. In
FLAIRS.
Katz, G., Marron, A., Sadon, A., and Weiss, G. (2019). On-
the-fly construction of composite events in scenario-
based modeling using constraint solvers. In MODEL-
SWARD.
Knuth, D. (1976). The complexity of nonuniform random
number generation. Algorithm and Complexity, New
Directions and Results.
Kwiatkowska, M., Norman, G., and Parker, D. (2011).
PRISM 4.0: Verification of Probabilistic Real-Time
Systems. In CAV.
McMillan, K. L. (1993). The SMV System. Symbolic
Model Checking.
Naveed, H., Arora, C., Khalajzadeh, H., Grundy, J., and
Haggag, O. (2024). Model driven engineering for ma-
chine learning components: A systematic literature re-
view. Information and Software Technology, 169.
Puterman, M. L. (1990). Markov decision processes. In
Stochastic Models, volume 2. Elsevier.
Qin, X., Bliudze, S., Madelaine, E., Hou, Z., Deng, Y., and
Zhang, M. (2020). Smt-based generation of symbolic
automata. Acta Informatica, 57.
Rabin, M. O. and Scott, D. (1959). Finite automata and
their decision problems. IBM Journal of Research and
Development, 3.
Exploring and Evaluating Interplays of BPpy with Deep Reinforcement Learning and Formal Methods
39

Savitch, W. J. (1970). Relationships between nondetermin-
istic and deterministic tape complexities. Journal of
computer and system sciences, 4.
Shevrin, I. and Yossef, M. (2020). Spectra example:
Cinderella-stepmother problem.
Stoelinga, M. (2004). An Introduction to Probabilistic Au-
tomata. Bulletin of the EATCS, 78.
Towers, M., Terry, J. K., Kwiatkowski, A., Balis, J. U.,
Cola, G., Deleu, T., Goul
˜
ao, M., Kallinteris, A., KG,
A., Krimmel, M., Perez-Vicente, R., Pierr
´
e, A., Schul-
hoff, S., Tai, J. J., Tan, A. J. S., and Younis, O. G.
(2023). Gymnasium.
Yaacov, T. (2023). BPpy: Behavioral programming in
Python. SoftwareX, 24.
Yaacov, T., Elyasaf, A., and Weiss, G. (2024). Keeping
Behavioral Programs Alive: Specifying and Execut-
ing Liveness Requirements. In International Require-
ments Engineering Conference.
Yerushalmi, R., Amir, G., Elyasaf, A., Harel, D., Katz, G.,
and Marron, A. (2023). Enhancing Deep Reinforce-
ment Learning with Scenario-Based Modeling. SN
Computer Science, 4.
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
40
