
Abnormal Predicates: Learning Categorical Defaults from Probabilistic
Rules
Rose Azad Khan and Vaishak Belle
School of Informatics, University of Edinburgh, Edinburgh, U.K.
Keywords:
Logic and Learning, Defaults, Knowledge Representation.
Abstract:
Learning defaults is a longstanding goal in the field of knowledge representation and reasoning. We provide
a novel method for learning defaults by way of introducing a new predicate: the abnormal predicate, which
explicitly covers all the exceptions to a rule, thus forming a default theory. Our proposed method for learning
defaults is sound and complete for all rule-exceptions, and can be extended for use on other frameworks.
1 INTRODUCTION
The use of default rules is a fundamental concern in
knowledge representation and reasoning. To date, a
variety of approaches have been proposed for captur-
ing defaults (Lakemeyer and Levesque, 2006), best
represented by the example that birds typically fly.
What we want as exceptions are certain categories
of birds, such as penguins and ostriches, which obvi-
ously do not fly. Perhaps the most established account
for dealing with defaults is by the use of nonmono-
tonic logic (Halpern, 1997; Denecker et al., 2000).
The idea is that the property of flying could hold for
all birds. But for birds that are ostriches, dead, or pen-
guins, we would retract the claim that they fly. That is,
the addition of knowledge forces us to retract, leading
to the nonmonotonic flavor.
In fact, early in the history of knowledge repre-
sentation, John McCarthy proposed the notion of cir-
cumscription (McCarthy, 1980; Reiter, 1982). Here
the idea is that so-called abnormal predicates can be
used. The idea is that if one carefully controls the ex-
tension of this predicate, then the property of flying
could hold for all but the unusual ones. Ostriches and
dead birds, for example, would be considered abnor-
mal, allowing the property of flying to be inferred for
the remaining birds. For ones in such categories, we
would conclude that these birds would not fly. In a
first-order setting, if a particular bird, such as Tweety,
is not abnormal, then we would conclude that Tweety
can fly.
The exciting progress made on unifying differ-
ent semantic approaches for defaults is noteworthy
(Etherington, 1987; Boutilier, 1994; Lakemeyer and
Levesque, 2006). However, the challenge of automat-
ically learning defaults is still a major one.
We provide a novel method for learning defaults
by way of introducing an invented predicate – the ab-
normal predicate – which takes its inspiration from
John McCarthy’s proposal. This invented predicate
explicitly covers all the exceptions to a rule, thus
forming a default theory. Default theories present a
way of formalising inference rules without having to
explicitly account for all of their exceptions (Ether-
ington, 1987). It has been argued that default theories
more closely represent human reasoning and knowl-
edge (Morgenstern and McIlraith, 2011).
Our proposed method for learning defaults is
sound and complete for all rule-exceptions, and can
be extended for use on other frameworks. In this pa-
per, we showcase a method for learning defaults im-
plemented by way of extending the probabilistic rule-
learning algorithm ProbFOIL (De Raedt et al., 2015).
However, we treat the probabilistic rule-learner as a
black box, and our approach is therefore algorithm-
agnostic, and could be implemented by any program
which meets the input specifications of our algorithm.
2 BACKGROUND: ProbFOIL
The ProbFOIL algorithm (De Raedt et al., 2015) is
a probabilistic extension of the FOIL rule learner
(Quinlan and Cameron-Jones, 1993), built using
ProbLog syntax (De Raedt et al., 2007). The method
of learning rules is similar to standard Inductive Logic
Programming (ILP) (Muggleton et al., 2012). An
892
Khan, R. A. and Belle, V.
Abnormal Predicates: Learning Categorical Defaults from Probabilistic Rules.
DOI: 10.5220/0013229000003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 892-900
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

ILP algorithm creates rules by constructing clauses
from a set of declared predicates. The hypothesized
clauses are evaluated by looking at the number of ex-
amples which they entail correctly. The optimal rule
set is the one which entails all the positive examples in
the dataset and none of the negative examples. Usu-
ally, the hypothesis is expected to be consistent with
all the examples, and this means that a single incor-
rect example can prevent an entire rule from being
learned. In ProbLog and ProbFOIL, this is not a prob-
lem since examples and rules do not have to be cat-
egorical. The examples used in ProbFOIL can (op-
tionally) have probabilities attached, and the result-
ing clauses learned are also probabilistic. When the
probabilities of the examples are all set to 0 and 1,
the rule-learning problem is the same as standard ILP
(De Raedt et al., 2015).
The ProbFOIL algorithm evaluates candidate
clauses by considering the number of examples cor-
rectly predicted by each clause. An example is an
atom which assigns some property (i.e., predicate) to
a constant e.g. bird(a). A (non-ground) clause is a
disjunction; for example bird(x) → f lies(x). The aim
is to find the clause (or set of clauses) which best pre-
dicts the examples given.
Predicted examples fall into four categories: true
positives (TP), true negatives (TN), false positives
(FP) and false negatives (FN). True positive exam-
ples are those which are positive, and are correctly
predicted as positive. False positives are incorrectly
predicted as positive. True negatives are correctly
predicted negative examples, and false negatives are
incorrectly predicted as negative. The ProbFOIL al-
gorithm tries to find rules which maximize the num-
ber of true positives, while minimizing the number
of false positives and false negatives. Since this is a
probabilistic setting, both the classification of an ex-
ample and the predictions of a hypothesis are proba-
bilistic i.e. a given hypothesis will predict a probabil-
ity value p
i
∈ [0, 1] for an example e
i
, instead of 0 or
1.
As discussed, in a deterministic setting, p
i
= 1 for
a positive example, and p
i
= 0 for a negative exam-
ple. This corresponds to a standard ILP model. In the
probabilistic setting, each example e
i
adds p
i
to the
positive part of the dataset, and 1 − p
i
to the negative:
P =
M
∑
i=0
p
i
N =
M
∑
i=0
(1 − p
i
) = M − P
P denotes the positive part of the dataset, and N the
negative part. M is the size of the dataset i.e. the total
number of examples in the learning data.
The true positive and false positive rates of the
model (TP and FP resp.) are therefore not integers,
but are the sums of the probabilities of the examples:
T P
H
=
M
∑
i=0
t p
H,i
where t p
H,i
= min(p
i
, p
H,i
)
FP
H
=
M
∑
i=0
f p
H,i
where f p
H,i
= max(0, p
H,i
− p
i
)
T P
H
and FP
H
refer to the true positive and false
positive rates of the model under hypothesis H. Here,
p
i
is the true probability of example e
i
, and p
H,i
is the
predicted probability of the example under hypothesis
H. Furthermore, T N
H
= N − FP
H
and FN
H
=
P − T P
H
. This is also the case in the deterministic
setting (De Raedt et al., 2015).
The algorithm operates using two loops. The outer
loop maximizes a global scoring function, while the
inner loop maximizes a local scoring function. The
global scoring function used is accuracy, which is a
measure of the proportion of examples correctly clas-
sified by the algorithm:
accuracy
H
=
T P
H
+ T N
H
M
The local scoring function uses the m-estimate,
which is a variant of precision. Precision measures
the proportion of examples classified as true which
are actually true. The m-estimate is given by:
m − estimate
H
=
T P
H
+ M
P
N+P
T P
H
+ FP
H
+ m
In the above equation, m is a parameter of the al-
gorithm. P is the total number of positive examples,
and N is the total number of negative examples. TP
and TN are the same as above, while FP is the number
of false positives.
The algorithm operates as follows: the outer loop
begins with an empty set of clauses, and repeatedly
adds clauses to the hypothesis until no more improve-
ment of the m-estimate can be obtained. The inner
loop obtains the clauses to be added to the outer loop.
Given a set of clauses H, the algorithm searches for
the clause c(x) = (x :: c) the clause which maximizes
the local scoring function. Here, x indicates the prob-
ability that the body of the clause entails the head.
The algorithm attempts to maximise x according to:
arg max
x
M(x) =
T P
H∪C(x)
+ M
P
N+P
T P
H∪C(x)
+ FP
H∪C(x)
+ m
For each candidate clause c(x), examples are classi-
fied according to whether their target value p
i
is over-
estimated, underestimated or estimated perfectly by
Abnormal Predicates: Learning Categorical Defaults from Probabilistic Rules
893

the clause. If it is the case that p
H,i
> p
i
then the true
positive part is p
i
, and the remaining value p
H,i
− p
i
belongs to the false positive part of the dataset. In this
case, hypothesis H overestimates the value of e
i
. If
the hypothesis underestimates e
i
such that p
i
> p
H,i
then p
H,i
is the true positive part, and p
i
− p
H,i
be-
longs to the false negatives. From these categories of
examples, the true positive and false positive rates are
calculated, and hence the m-estimate is calculated.
The ProbFOIL learning algorithm uses a beam
search in order to find the global rather than local
maximum. Clauses are generated using relational
path finding, which is a method of considering con-
nections between variables in the examples (De Raedt
et al., 2015). The probabilities p
H,i
are computed
using functionality from ProbLog (De Raedt et al.,
2007). The algorithm also includes a significance test
in order to penalise long clauses. Often, long clauses
will have a number of literals in the body which do
not contribute much to the overall predictive power of
the clause. The significance test used here is a variant
of the likelihood ratio statistic (De Raedt et al., 2015).
The significance level p can be set on the command
line. For this project, we used p = 0.0 since our im-
plementation required that long clauses were returned
by the algorithm.
3 METHODOLOGY
The aim of this paper is to build a system which
first learns probabilistic rules from probabilistic data,
using regular, unmodified structure learning meth-
ods, and then attempts to ‘complete’ these statisti-
cal rules by constructing an abnormal predicate. As
part of this process, the program constructs the do-
main of the abnormal predicate by finding the exam-
ples and categories which the predicate applies to. In
the first instance for example, we learn a rule such
as Bird(x) → Flies(x) which has a probability at-
tached e.g. 0.96. From this rule, we construct a new
rule Bird(x) ∧ ¬Abnormal(x) → Flies(x) which
has a probability of one. This is our new categori-
cal default. The predicate Abnormal applies to every
instance for which Bird(x) ∧ ¬Flies(x) is true. We
also add to the knowledge base a rule which explicitly
states which kinds of objects are abnormal, for exam-
ple Penguin(x) → Abnormal(x), since penguins do
not fly.
The final default-learning algorithm therefore
consists of two distinct stages. In the first stage, the
normal ProbFOIL algorithm is run, and returns a set
of rules which explicitly show the negative examples
of the rules. In the second stage, the modified default-
learning algorithm is run, and returns a rule which
subsumes all negative examples under a single abnor-
mal predicate.
Our chosen approach allows us to implement cat-
egorical default learning as a single step within the
ProbFOIL algorithm. It also allows us to compare
learning from the unmodified dataset with learning
from the dataset with the new abnormal predicate.
This comparison is useful as it enables us to make
links with the literature on statistical predicate inven-
tion, and compare our results with hypotheses and
theories from this literature.
3.1 Learning Defaults
The ProbFOIL algorithm uses a significance thresh-
old to penalize rule length and prevent the algorithm
from returning rules which have a high number of
predicates in the body of the rule. Setting the sig-
nificance threshold to zero allows the algorithm to
return rules where every negative predicate is in-
cluded in the body of the rule, for example Bird(x) ∧
¬Penguin(x) → Flies(x). This means that after the
original learning algorithm has run with a significance
threshold of p=0.0, a rule is returned which explicitly
covers every negative instance of that rule. Given this
rule, we simply extracted the negated predicates in the
body of the rule, and constructed the domain of the
new abnormal predicate using these categories.
The standard input to ProbFOIL consists of two
files: a database file and a settings file. The settings
file specifies the mode and type of each predicate, and
the database file contains the instances. The function
for the default-learning algorithm takes three argu-
ments: a set of ProbFOIL rules, a data object contain-
ing the examples (i.e. the data points from the files),
and the data files themselves.
3.2 Implementation
To implement the algorithm, we created a new
file ‘defaults.py’ which contained a function ‘con-
struct ab pred’. This function was called on the
hypothesis after the first learning stage had taken
place in the main module execution file ‘probfoil.py’.
The function takes the learned rules, examples and
datafiles, and constructs an abnormal predicate from
the learned rule. It then writes new instances of the
abnormal predicate to the datafile. After the function
has been called in probfoil.py, the data files are re-
loaded, and the learning algorithm is run again over
the new data. This time, the rule returned is the cate-
gorical default.
Firstly, the ProbFOIL rules are converted to
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
894

clauses. A clause consists of a head and body. In
the rule f lies(x) :- robin(x), the predicate f lies(x) is
the head of the clause, and the predicate robin(x) is
the body. The algorithm checks whether the body of
the clause is merely ‘true’ or ‘false’ and if either is
found, the clause is skipped. This is because a rule
such as f lies(x):- true merely states that everything
flies, while f lies(x):- f alse states the opposite. These
rules are already categorical rules of a sort, and there-
fore have no exceptions and no examples that could
be placed under an abnormal predicate. Next, if the
body of a clause is a conjunction, then the body is
turned into a list of predicates. For each predicate in
the list, if the predicate is positive then it is added to
a list of positive predicates, and if it is negative then
it is added to a separate list. For each predicate in the
negative predicate list, we retrieve the examples from
the data object in which they are stored. The positive
predicate is used to construct the abnormal predicate,
since it is this predicate which gives the overall cat-
egory which the rule pertains to. For each positive
predicate, we check whether the negative examples
are a subset of the examples which the positive predi-
cate applies to. If they are not a subset, then the pred-
icate is dismissed as an option, since it is the wrong
category, that is to say, the negative examples cannot
be exceptions to this category.
The abnormal predicate name is constructed by
appending ‘ab ’ to the name of the chosen positive
predicate. This yields abnormal predicates such as
‘ab bird’ and ‘ab person’. To construct the domain
of the predicate, we create new data points from the
negative examples using the newly created abnormal
predicate. For example, if the original data file con-
tained the data points ‘penguin(1)’ and ‘penguin(4)’,
the examples 1 and 4 would be returned. The new
data points created would then be ‘ab bird(1)’ and
‘ab bird(4)’. These are written to the database file.
We also create mode and type statements for the ab-
normal predicate, and these are written to the settings
file. The original clause and its abnormal predicate
are returned as command line output.
3.3 Alternative Approaches
Given that we have a rule for which we want to cre-
ate an abnormal predicate, the problem that we face is
that of trying to find the classes of objects which fall
under this predicate. An alternative method of achiev-
ing this would be to construct new rules which specify
the domain of the predicate (such as the Penguin rule
above), and then see whether the categorical default
Bird(x) ∧ ¬Abnormal(x) → Flies(x) is entailed by
the knowledge base when the new rule is included. If
the default is not entailed i.e. does not have a prob-
ability of 1, then we must go back and change the
domain of the predicate, and try again. The problem
with this approach is that it requires running the learn-
ing algorithm multiple times, for every possible con-
struction of the abnormal predicate, until the correct
domain is found for the abnormal predicate, and the
new rules and existing knowledge base jointly entail
the categorical default. This method would be com-
putationally expensive, and time taken would increase
with every type of exception to the original statistical
default.
4 EVALUATION
Both qualitative and quantitative evaluations were
carried out. Quantitative evaluations focused on
comparing the learning speed of the default-learning
algorithm with the learning speed of the original
ProbFOIL algorithm, for a range of different sized
datasets. The qualitative side of the evaluation consid-
ered a range of examples, including complex exam-
ples in which multiple defaults were learned. There
are open questions concerning whether the defaults
returned were what we expected, and how we could
judge what constitutes correctness in terms of default
learning.
4.1 Quantitative Evaluation
For the quantitative evaluation, we investigated learn-
ing speed. We generated datasets of increasing size by
hand, based on the birds-penguin default. 10% of the
data points generated were randomly selected from a
set of non-flying birds: [penguin, ostrich, dodo, kiwi].
A further 10% were randomly selected from a set of
non-birds: [cat, dog, rabbit]. The remaining 80% of
the data points were generated by selecting randomly
from a set of flying birds:[robin, blackbird, thrush, ea-
gle, sparrow]. The data points, including bird or non-
bird, species of bird, and whether the objects flies or
not, were written to an output datafile. The modes
and types of each kind of object were written to the
output settings file. Once the files were created and
filled, they were suitable to be used straightaway as
input to the ProbFOIL default-learning algorithm.
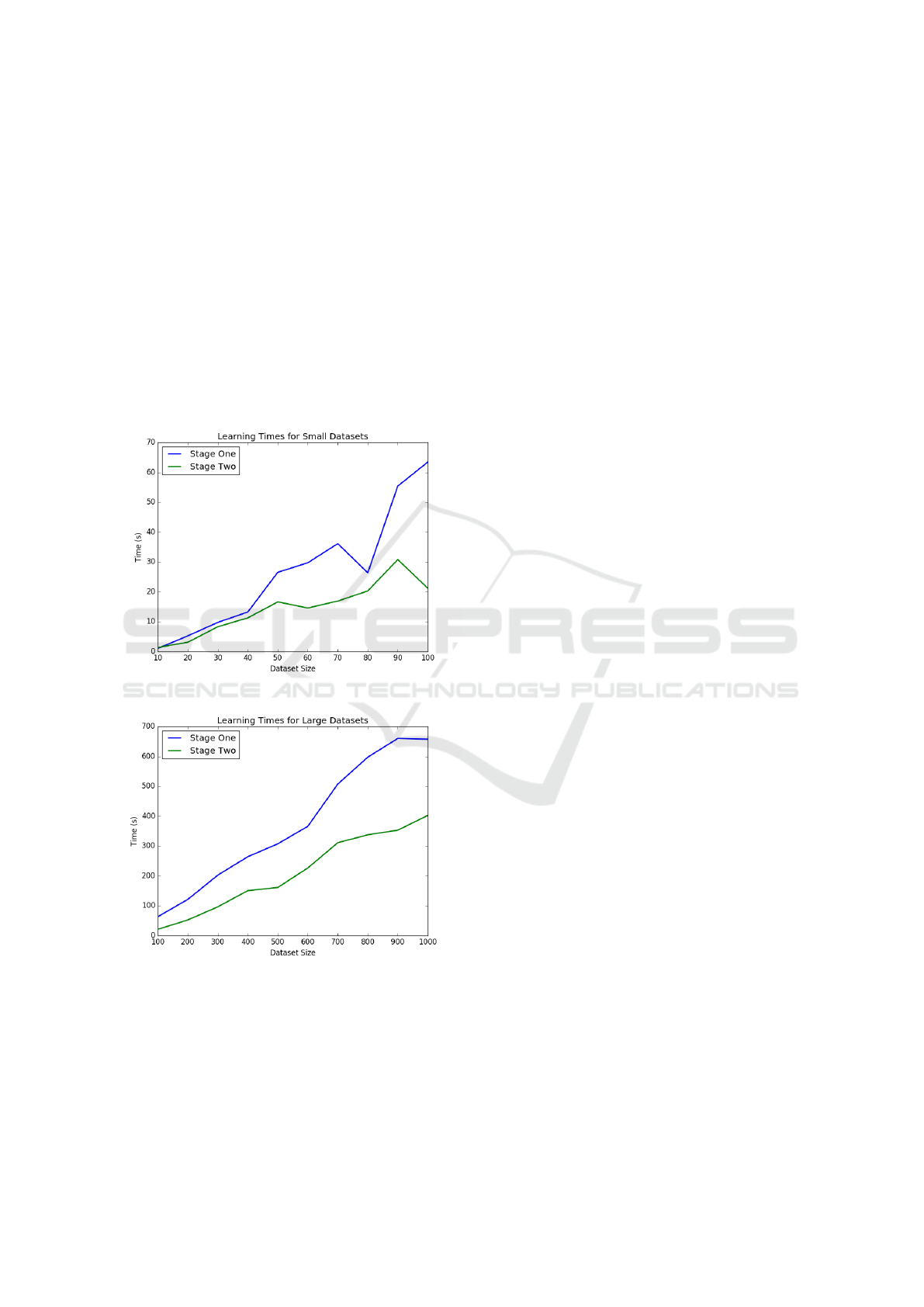
4.2 Learning Speed
The default learning algorithm is implemented in two
stages. The original learning algorithm runs during
the first stage, on unmodified data. After the first
stage, the learning data is modified based on the rules
Abnormal Predicates: Learning Categorical Defaults from Probabilistic Rules
895
returned, and the same learning algorithm runs on
the newly annotated data. The ProbFOIL code has
been modified to return the times taken for the first
and second stage, as well as the overall time. There-
fore, when comparing unmodified learning with de-
fault learning, we can simply compare the times for
the first stage with the time for the second stage.
Figure 1 shows the time taken to learn a single de-
fault in datasets of increasing size, from 10 data points
to 100 data points. From the graph, it is clear that
the default learning stage is faster than the non-default
learning stage. This is also the case as the datasets be-
come much larger. Figure 2 shows the learning speed
for datasets of size 100 to size 1000, increasing by
100 data points at each stage.
Figure 1.
Figure 2.
4.3 Qualitative Evaluation
For the base case, we used a version of the birds
example described in the Introduction (Section 1.1).
The data consisted of several birds, each of which had
a type, and for each bird it was specified whether or
not that bird could fly. The types of birds included
were: robin, thrush, eagle, blackbird, penguin, dodo
and ostrich. We also included dogs, so that birds
would be distinguished from other types of objects
in the universe. Four of the bird types (thrush, ea-
gle, robin, blackbird) could fly, while the remaining
three bird types (penguin, dodo, ostrich) cannot fly. It
was also specified that dogs cannot fly. In the learning
data, we included several flightless birds, alongside a
larger number of flying birds. From the unmodified
structure learning algorithm, with a significance level
of 0.0, the following rule was returned:
flies(x) :-
bird(x), \+penguin(x),
\+ostrich(x), \+dodo(x).
In our modified version of ProbFOIL, the default-
learning stage occurs automatically immediately after
the normal structure learning takes place. The algo-
rithm returns the intermediate theory, which is the rule
learned from the unmodified data, and the final theory,
which is the rule (or rules) learned from the data with
the added abnormal predicate data points. The final
rule returned in the birds examples is show below:
flies(x) :- bird(x), \+ab_bird(x).
This is the desired outcome, and the outcome
which was to be expected given the data.
We also tested the defaults-learning algorithm on
a variety of more complex, interesting examples, in-
cluding multiple possible defaults in a single dataset.
We constructed several examples by hand to investi-
gate.
4.3.1 Independent Defaults
The ProbFOIL algorithm works by specifying a sin-
gle target predicate at a time, meaning that we cannot
test the case of learning multiple defaults simultane-
ously. Instead we created a dataset which contained
two distinct abnormal predicates to learn, and learned
first one categorical default, and then the second. The
first default learned was the basic birds example. The
second rule learned was based on data about several
different kinds of cats. The target predicate was ‘tail’.
Every kind of cat had a tail, except for injured cats and
Manx cats. The rule returned by the normal structure
learning algorithm was:
tail(x) :-
cat(x), \+injured(x), \+manx(x).
The rule returned by the second stage of the learn-
ing process was the categorical default containing the
abnormal predicate, as expected:
tail(x) :- cat(x), \+ab_cat(x).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
896

In this example we first learned the ‘flies’ predi-
cate, and second learned the ‘tail’ predicate. The cat-
egorical defaults for both predicates were learned suc-
cessfully.In both cases, the time taken to learn the rule
was shorter in the second learning stage (i.e. in the
stage in which the ab pred data points were present)
than in the first stage.
4.3.2 Nested Defaults
We use the term ‘nested defaults’ to mean exam-
ples in which first one default is learned, and an ab-
normal predicate is created, and then a second de-
fault which includes the previously learned abnor-
mal predicate is learned. We wanted to see whether
the algorithm would make use of the new predicate
in the second learning step, and if so whether this
affected the outcome of the learning process. The
data for this example was based on the usual birds
default. We also included data about the origins of
the birds (this information was entirely hypothetical
and may not reflect the true origins of these bird
species). To begin with, we learned the initial rule
f lies(x) :- bird(x), \ + ab bird(x) in which the ab-
normal predicate applied to the non-flying birds pen-
guins, dodos, ostriches and kiwis. In the data, we had
also specified that dodos, kiwis and ostriches come
from Australia, while robins, thrushes, eagles, spar-
rows and blackbirds are found in England. Penguins
are neither English nor Australian. These predicates
are mutually exclusive, that is, a bird species cannot
be both English and Australian. For completeness, we
stated that neither predicate applied to dogs.
For the second learning step, given that we had al-
ready learned the abnormal predicate and added the
abnormal data points to the data files, we then learned
the predicate ‘australian(x)’. We compared the learn-
ing speeds and outputs for both the normal ProbFOIL
algorithm and for the modified default learning algo-
rithm. The output of the normal ProbFOIL algorithm
was:
australian(x) :-
\+eagle(x), \+robin(x), bird(x),
\+penguin(x), \+blackbird,
\+thrush(x),
The time taken for this learning stage was around
9 seconds (varying by 1-2 seconds on each run) and
the number of rules evaluated was 220.
The defaults learning algorithm output the follow-
ing rule:
australian(x) :-
ab_bird(x), \+penguin(x).
The same rule was returned at both the interme-
diate stage and the final stage of the default learning
algorithm. On one trial, the time taken for stage one
was 13.3 seconds, and the time for stage two was 6.8
seconds, giving a total of 20.1 seconds. There were
99 rules evaluated in stage one and 108 evaluated in
stage two. It is interesting to note that in this learning
step, the algorithm created an ‘ab ab bird(x)’ predi-
cate, which presumably applied to penguins only, but
this predicate was not used in the final rule.
For a second experiment, we learned the predi-
cate ‘english(x)’. This predicate applied to all non-
abnormal (i.e. flying) birds. When we learned this
predicate using the normal algorithm, the following
rule was returned:
english(x) :-
bird(x), \+penguin(x), \+dodo(x),
\+ostrich(x), \+kiwi(x).
The learning time was 5.95 seconds and the num-
ber of rules evaluated was 189. In the comparison
case, we once again learned the typical abnormal
predicate ab bird, and then learned the predicate ‘en-
glish(x)’ from the modified data containing the ab-
normal predicate data points. The following rule was
returned:
english(x) :- \+ab_bird(x), bird(x).
The time taken for stage one was 2 seconds, with
99 evaluations, and for stage two was 1.6 seconds,
and once again 99 evaluations. This is remarkably
quick compared to the normal algorithm results.
However, this speed is perhaps not surprising, since
the domain of the english predicate in this example
was exactly the same as the domain of the abnormal
predicate. This possibly allowed for the learning
algorithm to take larger steps, as is described with
multi-relational clustering (Kok and Domingos,
2007). Nevertheless, it is clear that this learning stage
was quicker due to the abnormal predicate, and that
the abnormal predicate data was efficiently used in
learning.
In both of the above examples, we can see that
a learned abnormal predicate can be used to construct
further rules from the same dataset, and that in some
cases speeds up the learning process. The increase in
learning speed seems to depend on the similarity of
the domains which are being learned. This observa-
tion supports the results found in statistical predicate
invention which state that different clusterings are
better at predicting different subsets of the data (Kok
and Domingos, 2007). Furthermore, in both cases
the rules learned by the default-learning algorithm
are notably shorter than the rules learned by the
unmodified algorithm.
Abnormal Predicates: Learning Categorical Defaults from Probabilistic Rules
897

4.3.3 Conflicting Defaults
In some cases, there may be more than one candi-
date for the abnormal predicate. We include a loop in
the code which tests whether the candidate abnormal
predicate (prior to abnormalization) applies to every
negative example in the data. If the predicate does
not apply to a superset of the set of negative example
objects, then it is dismissed as a candidate, since it is
clear that the negative examples cannot then be said to
be exceptions to this predicate. This approach works
when there is more than one positive predicate in the
body of the rule, but where only one predicate applies
to all the negative examples.
However, this approach will not work when there
are two positive predicates which apply to every neg-
ative example. For example, assume that we have the
same dataset as the original bird example, except that
every bird is also specified as being alive. There are
no dead birds in this dataset. In this case, there is
no functional difference between the ‘bird’ predicate
and the ‘alive’ predicate, and we have no means of de-
ciding based on the data we have, which category the
negative examples are exceptions to. According to the
data, it is just as plausible to create an ‘ab alive’ pred-
icate to group the negative examples as it is to create
an ‘ab bird’ predicate.
We have no straightforward answer to this ques-
tion. It would of course be possible to modify the
code to make it possible to create two abnormal pred-
icates for a single rule. The problem we have is that
in some cases, it would be incorrect to create one of
the predicates, such as in the ab alive case specified
above. However, this incorrectness comes from our
intuition and our knowledge of the domain, rather
than from the data itself. Perhaps in these cases,
where it is impossible to distinguish between two can-
didates for the abnormal predicate, we should either
skip this rule, or create two abnormal predicates, un-
der the assumption that at least one is correct. These
are open questions, and there is no right answer that
we can see. Given our current system, the most we
can hope for is that the learning data is complete, and
that every possible predicate assignment is present in
the data. For example, in the ‘alive’ case, we would
need to include at least one bird that is dead, along-
side all the other alive birds, otherwise we might as
well just get rid of the ‘alive’ predicate. In summary,
we would like to eliminate the possibility of two pred-
icate domains overlapping completely.
4.4 Limitations
There are several limitations to the default-learning
algorithm described here. Firstly, this approach re-
quires that the negative examples are explicitly re-
turned. Secondly, throughout the design and imple-
mentation process, we worked on the assumption that
the data would be complete and correct. This is of
course an assumption that is often not the case when
working with real-world datasets.
A final limitation derived from the ProbFOIL al-
gorithm design, which allows only a single target
predicate to be specified for learning at a time, mean-
ing that categorical defaults must be learned one-by-
one. This is not a problem for small datasets, but may
become problematic when we consider large datasets
containing multiple possible defaults.
5 RELATED WORK
Surprisingly, there is very little work on learning de-
faults despite a wide range of languages and semantic
approaches for reasoning about defaults (Lakemeyer
and Levesque, 2006; Halpern, 1997). There is very
early work that discusses learning considerations for
representing defaults (Grosof, 1992), but this remains
at the level of a conceptual proposal about how de-
faults can be integrated as inductive bias. Similar in
spirit, the work of (Schuurmans and Greiner, 1994)
looks at default concepts in terms of a so-called block-
ing process. By means of a formal justification us-
ing Valiant’s probably approximately correct learning
(Valiant, 1999; Valiant, 2013), the conceptual idea is
interesting and possibly applicable to a proposal like
ours. However, there is not much on the types of
default theories that have been learned beyond some
very simple examples.
On the one hand, what we are proposing here is
also a conceptual idea: lumping together all the ex-
ceptions in one or more abnormal predicates, and ap-
pealing to ProbFOIL. In principle, structure learners
that are different from ProbFOIL could potentially
be leveraged for an implementation of our idea. We
have done preliminary work on attempting to recreate
this procedure with a Markov Logic Network struc-
ture learner (Kok and Domingos, 2010). Over a small
dataset that we used for our evaluations, the structure
learner returns the following clauses.
//predicate declarations
Penguin(dom1). Flies(dom1).
Bird(dom1). Robin(dom1).
//rules returned
5.04534 Bird(a1)
-5.76512 Penguin(a1)
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
898

-5.99439 Flies(a1)
-0.00053092 Robin(a1)
10.0914 Bird(a1) v !Robin(a1)
11.6038 !Bird(a1) v Flies(a1)
13.5153 Bird(a1) v !Penguin(a1)
-11.2906 !Penguin(a1) v Robin(a1) v Flies(a1)
Here, ‘dom1’ refers to the domain, and ‘!’ in is equiv-
alent to the negation symbol in FOL.
For instance, it learns that for the constant a1, if it
is a robin then it is also a bird. Likewise, for the con-
stant a1, if it is a penguin, it is also a bird, and if it is
a bird, it also flies. It is conceivable that by iterating
over this procedure, it is possible to also induce that
for all the constants in the domain, if they are pen-
guins, they do not fly. This would then give us the
appropriate condition for constructing an abnormality
predicate.
The applicability of the Markov logic network
structure learner is not as immediate as ProbFOIL,
but it is also not too distant from it. We suspect other
types of rule learners, especially those relying on neu-
ral techniques (Bueff and Belle, 2024), could also be
applied in a similar way to learn default theories.
It is perhaps less surprising to note that the idea
of constructing logical exceptions is not new in it-
self. There have been a number of proposals that sug-
gest an analogous framework to ours. For instance,
Sakama (Sakama, 2005) suggests the use of negation
as failure to construct rules of the following sort:
fly(x) :-
bird(x),
not pengiun(x), not crippled(x).
It might then be possible to construct an abnor-
mality predicate from these exceptions.
Likewise, in early work, (Dimopoulos and Kakas,
1995) discusses the work of learning exceptions based
on patterns in the negative examples to learn a hierar-
chical logic program. Analogously, in work that we
became aware of at the time of writing this paper,
the proposal of (Shakerin et al., 2017) is very simi-
lar in spirit. They propose an algorithm called FOLD
– which has recently been extended to hybrid domains
(Wang and Gupta, 2022) – that also aims to construct
abnormality predicates based on exceptions. Thus, it
sits in between the work of (Dimopoulos and Kakas,
1995) and ours. However, the semantics of this ap-
proach is tightly linked to and justified by their non-
monotonic semantical setup. In contrast, what we
are able to demonstrate is that by using existing rule
learners such as FOIL, ProbFOIL, or Markov Logic
Network structure learners, it is simple to construct
hierarchies of exceptions. This idea can be teased
apart without committing to a specific language or
even a specific type of exception learner. Perhaps be-
cause we use ProbFOIL, we might further add proba-
bilities to defaults, which might enable the treatment
of statistical defaults (Bacchus et al., 1996) in a prac-
tical manner.
In sum, from a semantical perspective, what we
are attempting here is different from the previous
work on learning defaults by appealing to one or
more distinguished abnormality predicates. From an
algorithmic point of view, we are able to leverage
any structured learner because we essentially need to
lump the exceptions as abnormal ones, yielding a de-
fault theory. Essentially, what we are proposing is a
simple way of considering categories of objects under
the abnormality predicate. We believe our approach is
likely more accessible than previous accounts, such as
(Schuurmans and Greiner, 1994).
6 CONCLUSION
We propose a simple approach to learning defaults by
constructing abnormality predicates from all the neg-
ative instances in the learned rules. Such a model al-
lows us to construct nested defaults as well. In con-
trast to most existing work, which either falls into the
camp of being a conceptual model with limited evalu-
ations or into the camp of specialized algorithms, the
nature of our proposal is that it is accessible and can
be built in principle on any structure.
The results of our quantitative analysis shows that
learning speed is quicker on the dataset which con-
tains the ab pred data points alongside the normal
data points, even though there is a higher number of
data points in the learning data in the second stage
than in the first stage. These findings seem to con-
firm that our system bears some resemblance to meth-
ods used for statistical predicate invention, and there-
fore has similar advantages. Specifically, it seems as
though the effective addition of a new category en-
ables the learning algorithm to find rules which ex-
plain the data more quickly.
For the future, it would be interesting to scale our
results. Recall that the original ProbFOIL learning
algorithm was evaluated (De Raedt et al., 2015) us-
ing the dataset from the NELL (Never-Ending Lan-
guage Learning) project (Carlson et al., 2010). It
would be interesting to run our algorithm on this
dataset, compare it against the reported ProbFOIL re-
sults (De Raedt et al., 2015), and finally qualitatively
evaluate the types of defaults induced.
An argument often made in the knowledge rep-
resentation community (McCarthy and Hayes, 1969;
McCarthy, 1980) is that allowing exceptions will
likely make common sense reasoning easier without
Abnormal Predicates: Learning Categorical Defaults from Probabilistic Rules
899

stipulating all the exceptions explicitly. It is also
widely acknowledged that defaults appear in many
models about the world – for example, we likely fre-
quently invoke causal completeness (Reiter, 1991) to
reason about the physical world. Roughly, this means
that a reasonable number of conditions capture the
preconditions and the effects of actions, and those not
mentioned are not relevant for the task at hand. It
would be interesting to see whether our proposal here
could allow the learning of such default theories, both
in a static as well as a dynamic setting.
REFERENCES
Bacchus, F., Grove, A. J., Halpern, J. Y., and Koller, D.
(1996). From statistical knowledge bases to degrees
of belief. Artificial intelligence, 87(1-2):75–143.
Boutilier, C. (1994). Unifying default reasoning and belief
revision in a modal framework. Artificial Intelligence,
68(1):33–85.
Bueff, A. and Belle, V. (2024). Learning explanatory logi-
cal rules in non-linear domains: a neuro-symbolic ap-
proach. Machine Learning, pages 1–36.
Carlson, A., Betteridge, J., Kisiel, B., Settles, B., Hr-
uschka Jr, E. R., and Mitchell, T. M. (2010). Toward
an architecture for never-ending language learning. In
AAAI, volume 5, page 3.
De Raedt, L., Dries, A., Thon, I., Van den Broeck, G., and
Verbeke, M. (2015). Inducing probabilistic relational
rules from probabilistic examples. In Proceedings of
24th international joint conference on artificial intel-
ligence (IJCAI), pages 1835–1842.
De Raedt, L., Kimmig, A., and Toivonen, H. (2007).
Problog: A probabilistic prolog and its application in
link discovery.
Denecker, M., Marek, V. W., and Truszczynski, M. (2000).
Uniform semantic treatment of default and autoepis-
temic logic. In Proc. KR, pages 74–84.
Dimopoulos, Y. and Kakas, A. (1995). Learning non-
monotonic logic programs: Learning exceptions. In
Machine Learning: ECML-95: 8th European Confer-
ence on Machine Learning Heraclion, Crete, Greece,
April 25–27, 1995 Proceedings 8, pages 122–137.
Springer.
Etherington, D. W. (1987). Relating default logic and cir-
cumscription. In Proceedings of the 10th international
joint conference on Artificial intelligence - Volume 1,
pages 489–494, San Francisco, CA, USA. Morgan
Kaufmann Publishers Inc.
Grosof, B. N. (1992). Representing and reasoning with de-
faults for learning agents. In Proceedings of the ML92
Workshop on Biases in Inductive Learning. Proceed-
ings Available from the Workshop Chair, Diana Gor-
don: Naval Research Laboratory, Washington, DC,
volume 20375.
Halpern, J. (1997). A Critical Reexamination of De-
fault Logic, Autoepistemic Logic, and Only Knowing.
Computational Intelligence, 13(1):144–163.
Kok, S. and Domingos, P. (2007). Statistical predicate in-
vention. In Proceedings of the 24th international con-
ference on Machine learning, pages 433–440. ACM.
Kok, S. and Domingos, P. (2010). Learning markov logic
networks using structural motifs. In ICML, pages
551–558.
Lakemeyer, G. and Levesque, H. J. (2006). Towards an
axiom system for default logic. In Proc. AAAI, pages
263–268.
McCarthy, J. (1980). Circumscription–a form of non-
monotonic reasoning. Artificial intelligence, 13(1-
2):27–39.
McCarthy, J. and Hayes, P. J. (1969). Some philosophical
problems from the standpoint of artificial intelligence.
In Machine Intelligence, pages 463–502.
Morgenstern, L. and McIlraith, S. A. (2011). John Mc-
Carthy’s legacy. Artificial Intelligence, 175(1):1 – 24.
Muggleton, S., De Raedt, L., Poole, D., Bratko, I., Flach,
P., Inoue, K., and Srinivasan, A. (2012). Ilp turns 20.
Machine learning, 86(1):3–23.
Quinlan, J. R. and Cameron-Jones, R. M. (1993). Foil: A
midterm report. In Machine Learning: ECML-93:
European Conference on Machine Learning Vienna,
Austria, April 5–7, 1993 Proceedings 6, pages 1–20.
Springer.
Reiter, R. (1982). Circumscription implies predicate com-
pletion (sometimes). In Proceedings of International
Joint Conference on Artificial Intelligence (IJCAI),
pages 418–420.
Reiter, R. (1991). The frame problem in the situation calcu-
lus: a simple solution (sometimes) and a completeness
result for goal regression. In Artificial intelligence and
mathematical theory of computation: Papers in honor
of John McCarthy, pages 359–380. Academic Press.
Sakama, C. (2005). Ordering default theories and non-
monotonic logic programs. Theoretical Computer Sci-
ence, 338(1-3):127–152.
Schuurmans, D. and Greiner, R. (1994). Learning
default concepts. In Proceedings Of The Bien-
nial Conference-Canadian Society For Computational
Studies Of Intelligence, pages 99–106.
Shakerin, F., Salazar, E., and Gupta, G. (2017). A new al-
gorithm to automate inductive learning of default the-
ories. Theory and Practice of Logic Programming,
17(5-6):1010–1026.
Valiant, L. (2013). Probably approximately correct: Na-
ture’s algorithms for learning and prospering in a com-
plex world.
Valiant, L. G. (1999). Robust logics. In Proceedings of
the thirty-first annual ACM symposium on Theory of
Computing, pages 642–651.
Wang, H. and Gupta, G. (2022). Fold-r++: a scalable
toolset for automated inductive learning of default the-
ories from mixed data. In International Symposium on
Functional and Logic Programming, pages 224–242.
Springer.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
900
