
Spatio-Temporal Traffic Prediction for Efficient ITS Management
Aram Nasser
a
and Vilmos Simon
b
Department of Networked Systems and Services, Faculty of Electrical Engineering and Informatics,
Budapest University of Technology and Economics, Budapest, H-1111, Hungary
Keywords:
Intelligent Transportation Systems, Traffic Prediction, Attention, Encoder-Decoder, Spatio-Temporal Data
Presentation.
Abstract:
Traffic forecasting is a crucial element of Intelligent Transportation Systems (ITSs), exerting significant in-
fluence on the optimization of urban mobility. Through precise anticipation of traffic patterns, ITS facilitates
proactive traffic flow management, leading to a multitude of benefits for both the city and its inhabitants.
However, the intricate topological structure of road networks and the changing temporal patterns in traffic
create challenging problems that demand solutions considering both the spatial and temporal aspects of traffic
characteristics. Most existing traffic prediction models are influenced by Graph Neural Networks (GNNs) to
capture the spatial structure of road networks. However, this approach typically relies on the adjacency matrix,
which might not always reflect the dynamic state of traffic conditions. In addition, GNNs are not universally
applicable across different traffic topologies. What works for one road network may not yield the same results
for another, owing to disparities in the number of roads, thus graph nodes, and the unique characteristics of
each location. Therefore, in this paper, the Spatio-Temporal Multi-Head Attention (ST-MHA) model is in-
troduced to solve this issue. ST-MHA depends on a modified version of the Multi-Head Attention (MHA)
mechanism to capture the spatial structure of the road network implicitly, as well as a GRU-based encoder-
decoder structure for integrating the temporal characteristics. Our model outperforms three state-of-the-art
baseline models, which include temporal, spatial, and spatio-temporal models. This enhanced performance is
evident across three different prediction horizons when evaluated on a real-world traffic dataset.
1 INTRODUCTION
The unprecedented expansion of cities has imposed
increased pressure on transportation networks, result-
ing in a negative influence on human health, the econ-
omy, and the environment (Levy et al., 2010), (Zhang
and Batterman, 2013). This pressure has prompted
concerned people and organizations in smart cities
to contribute to the creation of systems for utilizing
information, communication, and sensing technolo-
gies in transportation and transit systems, referred to
as Intelligent Transportation Systems (ITSs) (Wang,
2010). One of the key elements of ITSs is predict-
ing traffic characteristics, such as speed, as it provides
a futuristic view of the traffic situation. This insight
gives the authorities the time needed to take action be-
fore congestion arises, ultimately leading to a reduc-
tion in pollution and commute time for individuals.
The integration of innovative technologies, as well as
a
https://orcid.org/0000-0001-9696-7387
b
https://orcid.org/0000-0002-7627-3676
novel data collection techniques, like sensors (includ-
ing floating car and wide-area sensors) and connected
vehicles, have increased the complexity of analyz-
ing and managing traffic data (Rahmani et al., 2023),
(Kaffash et al., 2021).
The problem of traffic prediction has evolved from
a statistical challenge into a problem tackled by Ma-
chine Learning and, most recently, Deep Learning. It
can be analyzed as time series data, allowing for fu-
ture predictions based on past observations and par-
ticularly considering the evolving traffic values over
time (Yuan et al., 2022). Nevertheless, in some cases,
because traffic data are gathered from real spatially-
located sensors, spatial information is integrated as
an external factor to improve traffic prediction. The
spatial topology of the road network can be mapped
as graphs with vertices and edges, describing the sen-
sors as well as the connections among them, respec-
tively. The initial graphs are usually built based on
adjacency matrices, which can be constructed on four
distinct bases: road-based, distance-based, similarity-
based, and dynamic matrices, according to (Jiang and
Nasser, A. and Simon, V.
Spatio-Temporal Traffic Prediction for Efficient ITS Management.
DOI: 10.5220/0013229700003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 45-53
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
45

Luo, 2022). However, although the spatial topology
of the roads is static, the connections, in reality, are
not and might be strong at some periods while weak
or negligible at others. As a result, GNNs can be per-
fect for time-static data, which is not the case in traffic
prediction.
To address this concern, researchers are endeavor-
ing to integrate the temporal dimension with GNNs,
enabling dynamic adjustments of connections over
time. Most available spatio-temporal models use the
GNNs to capture the spatial features of traffic data,
where the adjacency matrix is usually needed to for-
mulate the initial relationship among traffic detectors.
This matrix must be prepared earlier, and its dimen-
sions are fixed throughout the training process, which
restricts the ability to use the same model for different
road networks interchangeably. In other words, using
the model for another road network indicates build-
ing a new adjacency matrix specifically for that new
topology. In addition, building the adjacency matrix
can be a time-consuming task, and it varies based on
the scale. For example, for the same country, the ad-
jacency matrix used for the intra-city road network
differs from the one employed for inter-city or metro
stations.
These limitations have encouraged us to introduce
our novel model, ST-MHA, where the adjacency ma-
trix is no longer needed to capture the spatial depen-
dencies. Instead, ST-MHA can implicitly infer the
spatial topology from the data. In this manuscript,
we provide a spatio-temporal model that adjusts the
MHA mechanism to capture the spatial interactions
of data while a GRU-based encoder-decoder for the
integration of temporal information. The rest of this
article is organized as follows: the next section is ded-
icated to introducing state-of-the-art literature on traf-
fic prediction models, encompassing spatial, tempo-
ral, and spatio-temporal aspects. The detailed struc-
ture of ST-MHA, along with the elucidation of the
problem addressed by our model, is outlined in sec-
tion 3. In the following chapter, the experimental
setup, including the utilized dataset, evaluation met-
rics, and parameter designing, as well as the final re-
sults and discussions, are examined in 4. Finally, the
conclusion of our research is presented in the last sec-
tion.
2 RELATED WORK
Classic statistical models, like the ARIMA model and
its variants, have been widely used in the past to an-
alyze and predict future traffic status (Ahmed and
Cook, 1979), (Levin and Tsao, 1980), (Lee and Fam-
bro, 1999), (Williams, 2001), (Williams and Hoel,
2003), (Kamarianakis and Prastacos, 2003). How-
ever, these models assume the time series to be sta-
tionary (Karlaftis and Vlahogianni, 2011), (Li and
Shahabi, 2018), which hinders the traffic prediction
process. Thus, the advancement of non-parametric
models, such as Support Vector Regression (SVR)
(Castro-Neto et al., 2009), (Su et al., 2007), (Jin
et al., 2007), and Neural Networks (NNs) (Hua
and Faghri, 1994), (Dougherty and Cobbett, 1997),
(Ledoux, 1997), with improved efficiency and height-
ened predictive precision, has made statistical mod-
els less common, especially for complex data model-
ing. Initial non-parametric models have vigorously
challenged the classical parametric models. How-
ever, when it comes to handling temporal data, even
these models have their limitations due to the time-
based associations among time steps. This issue
prompted the introduction of Recurrent Neural Net-
work (RNN) (Rumelhart et al., 1986), a special type
of NNs equipped with memory cells to help cap-
ture the temporal features of the time series. Nev-
ertheless, the vanilla RNN suffers from the vanish-
ing gradient problem (Hochreiter, 1998) that is miti-
gated by its variants like the Long-Short Term Mem-
ory (LSTM) (Hochreiter and Schmidhuber, 1997) and
Gated Recurrent Unit (GRU) (Cho et al., 2014a).
These RNNs can also be structured as models like
the RNN Encoder-Decoder architecture (Cho et al.,
2014b) to allow for a deeper structure and additional
improvement of traffic prediction. While these mod-
els successfully address the traffic prediction issue as
a temporal problem, some models integrated the spa-
tial features as exogenous inputs to capitalize on the
spatial interactions among roads in the road network.
To fully leverage spatial features of the road net-
work, some researchers use modified versions of the
GNNs (Gori et al., 2005) to capture adjacent inter-
actions among distinct roads in the road network.
These models are extended by integrating Convolu-
tional Neural Networks(CNNs) (Lecun et al., 1998),
in both the spectral and time domains, with GNNs to
allow the extraction of multi-scale localized spatial
features and form GCNs (Kipf and Welling, 2017),
(Zhou et al., 2020). Other GNNs can also be ex-
tended by using the attention mechanism to over-
come the shortcomings of convolution-based GNNs
(Veli
ˇ
ckovi
´
c et al., 2017). According to (Veli
ˇ
ckovi
´
c
et al., 2017), these drawbacks are solved by calcu-
lating different weights to various nodes in a neigh-
borhood implicitly and avoiding the dependence on
knowing the graph structure upfront. Nonetheless,
these models lack the ability to capture the tempo-
ral features of traffic. Thus, incorporating models that
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
46

consider both time and space is essential to tackle the
spatio-temporal problem.
Harnessing the advantages of both temporal and
spatial characteristics of traffic data through the inte-
gration of these features into spatio-temporal models
has gained significant attention among researchers. In
(Zhao et al., 2020), GCNs are combined with GRU
units to simultaneously capture the spatial and tem-
poral dependencies within traffic data, respectively.
The authors then extended the model by incorporating
the attention mechanism into the existing framework
to improve prediction accuracy (Bai et al., 2021).
Traffic flow spatio-temporal dynamics are modeled as
a diffusion process in (Li et al., 2018), where spa-
tial interdependence is grasped through bidirectional
random walks on graphs and temporal interdepen-
dence is handled by employing the encoder-decoder
architecture with scheduled sampling. Dynamic Time
Warping (DTW), a technique used for matching and
alignment, is utilized and improved to what is called
“fast-DTW” to generate temporal graphs (Li and Zhu,
2021). These temporal graphs are then incorporated
into a novel Spatio-Temporal Fusion Graph Neural
(STFGN) model. Several STFGN are treated in par-
allel and their outputs are concatenated and added
with Gated CNN output to act as the input of the
next STFGN layer. Authors of SST-GNN (Roy et al.,
2021) introduce a streamlined framework that encap-
sulates two different models, current-day and histor-
ical, to capture daily and weekly patterns of traf-
fic data via a weighted spatio-temporal aggregation
scheme. In (Chen et al., 2019), the authors intro-
duced the MRA-BGCN model, which is comprised
of two parts. The first incorporates two graphs, node
and edge-wise graphs, and provides explicit model-
ing of interactions among nodes and edges. The sec-
ond is to autonomously learn the significance of dis-
tinct neighborhood ranges. In LSGCN (Huang et al.,
2020), a new graph attention network, called cosAtt,
is combined with GCN to grasp the spatial features
of traffic. In addition, a Gated Linear Unit (GLU)
is adopted for the temporal characteristics simulta-
neously. Zheng et. al. introduced GMAN (Zheng
et al., 2020), where spatio-temporal correlations are
modeled by employing an encoder-decoder architec-
ture that combines several spatio-temporal attention
mechanism blocks. Furthermore, a transform atten-
tion layer is devised between the encoder and the de-
coder to mitigate the impact of error propagation to
enhance long-term prediction performance. A variant
of the GCN, called LPGCN, is introduced in (Qi et al.,
2022) to model the spatial characteristics of traffic.
On the other hand, a multi-path CNN is utilized to
learn the collective influence of past traffic conditions
on future ones, which is further modified by an at-
tention mechanism. All the aforementioned spatio-
temporal models use adjacency matrices to construct
the GNNs and GCNs used in their models. These ad-
jacency matrices have their limitations, as mentioned
earlier, in addition to their impracticality while deal-
ing with large and sparse graphs -due to the large
number of zeros they might have in this case. In this
paper, the ST-MHA model is introduced to capture
both spatial and temporal features of traffic data by
utilizing a modified version of the MHA mechanism
and GRU-based encoder-decoder, respectively.
3 METHODOLOGY
The full architecture of the Spatio-Temporal Multi-
Head Attention Based Traffic prediction model is out-
lined in Fig. 1, where each block represents a specific
stage of the model. The lower part of each stage delin-
eates its inputs for each time step, the middle segment
displays its outputs, and the upper section indicates its
name. These stages are grouped into two components:
Spatial and Temporal. Further elaboration on these
components and their sections is provided in subse-
quent sub-sections 3.2 and 3.3, respectively. Never-
theless, before diving into the details of ST-MHA, the
problem this paper addresses is defined in the next
subsection 3.1.
3.1 Problem Definition and Statement
This paper addresses the problem of estimating fu-
ture traffic speeds over a given time horizon based on
present and past data. The data are collected from
multiple speed loop detectors positioned in various lo-
cations, and the objective is to capture this spatial dis-
tribution without relying on predefined graph struc-
tures. This spatial modeling is then integrated with a
temporal representation of data to achieve a compre-
hensive spatio-temporal framework for representation
and prediction.
Given T current and historical time steps
{X
(t−T −1)
, ...., X
(t−1)
, X
t
}, where X is the traffic data
of N roads, the aim is to predict future traffic data
{X
(t+1)
, ..., X
(t+τ)
}, where τ is the prediction horizon.
While this issue can be approached as a time series
problem, the integration of the spatial features could
improve traffic forecasting accuracy. The objective
of our proposed model, ST-MHA, is to utilize im-
plicit spatial and temporal patterns without the need
for creating graph structures that are restricted by the
number of nodes. To achieve that, our approach in-
volves employing a modified MHA model to capture
Spatio-Temporal Traffic Prediction for Efficient ITS Management
47
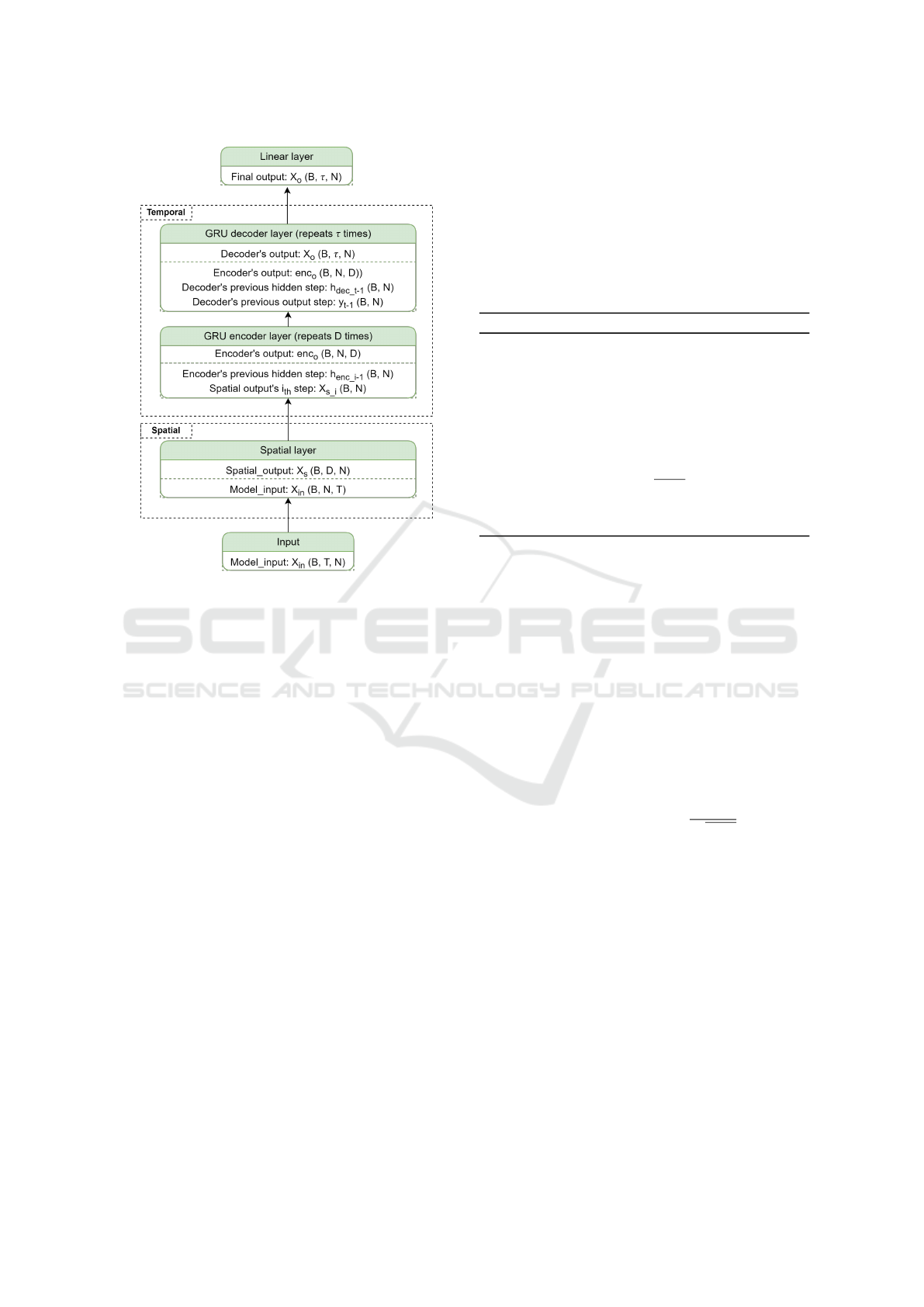
Figure 1: ST-MHA model.
the spatial properties, as well as integrating a GRU-
based encoder-decoder model to handle the temporal
characteristics.
Our model can improve traffic management by
helping authorities make informed decisions to re-
duce congestion, optimize traffic flow, and support
route planning for mapping applications. By predict-
ing traffic speeds, it provides real-time insights, al-
lowing authorities to adjust signal timings, optimize
light cycles, and implement diversions to minimize
delays. This leads to smoother traffic movement,
fewer bottlenecks, and more efficient travel for all
road users.
3.2 The Spatial Component
To obtain the spatial properties of traffic data with-
out relying on adjacency matrices or building graph
neural networks, the interactions among several road
detectors’ data are computed over the time dimension
spanning H periods, called “heads.” In other words,
the input time series is divided into several heads,
each describing distinct periods of the past data. Nev-
ertheless, this direct approach has two problems. The
first one arises when the available historical data are
scarce, which might make it challenging to partition
the data into segments. The second involves the care-
ful consideration of the number of input time steps,
ensuring that this number is divisible by the number
of heads H. Failing to meet this condition can lead to
the failure of the whole model. To solve these issues
and minimize the dependence on a varying number of
past time steps, the time dimension is mapped onto
the size of the model’s hidden dimension. Therefore,
the interactions are rendered within a consistent di-
mension, typically larger than the initial one.
Algorithm 1: Spatial Component.
Input: Input sequence X
in
Data: Model’s hidden size D, Number of
heads H
Result: Output sequence X
s
X ← Linear(X
in
) // Mapped input
Q ← Linear
q
(X) // Queries
K ← Linear
k
(X) // Keys
V ← Linear
v
(X) // Values
scores ← (Q · K)/
p
D/H // Scores
W
att
← Softmax(scores)
X
s
← ReLU(concat[W
att
·V ])
Following the extension of the time dimension,
the scaled dot product MHA mechanism is utilized
as described in equations 1 and 2, akin to the MHA
model in (Vaswani et al., 2017). The input time se-
ries are projected on three linear layers, yielding the
Query, Key, and Value matrices, denoted as Q, K, and
V, respectively. Subsequently, each of these matrices
is further reshaped and divided into H heads depict-
ing various periods of the past time steps. Each at-
tention head, AH
i
hereafter, discerns specific depen-
dencies within the input time series, thus allowing the
model to learn different representations of the input
by attending to different parts of the sequence.
AH
i
(Q
i
,K
i
,V
i
) = so f tmax(
Q
i
K
i
p
D/H
) ∗V
i
(1)
MHA(Q,K,V ) = Relu(concat[AH
1
,...., AH
H
]) (2)
To capture the interactions among the road data,
D/H matrix multiplications are undertaken between
Q and K in parallel. After that, the Softmax func-
tion is utilized to constrain the outputs between zero
and one. This operation yields a matrix, denoted as
W
attn
, whose dimensions are (B, D/H, N, N), where
N is the number of traffic detectors, illustrating how
traffic data spatially influence each other interchange-
ably over H time periods. Subsequently, this matrix
is used to scale the V matrix by another matrix-to-
matrix multiplication. The outcome of this process
is a scaled representation of the input matrix, which
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
48

varies based on the importance of each traffic detec-
tor’s influence on the rest. It is noteworthy to men-
tion that the values obtained from the matrix multi-
plication of Q and K are divided by the square root
of D/H to avoid a potentially large magnitude of the
dot product, which might push the Softmax function
into regions with exceedingly low gradients. These
interactions are then concatenated and processed with
the Relu activation function (Agarap, 2018) to form
the modified MHA. For a deeper understanding, the
pseudo code that describes the spatial component of
ST-MHA is given in algorithm 1.
3.3 The Temporal Component
The temporal part is a GRU-based encoder-decoder
model. Before delving into the details of this com-
ponent, it is important to clarify that the GRU cell
incorporates multiple gates as described in equation
(3)(ArunKumar et al., 2022):
z
t
= σ (W
z
∗ [h
t−1
;x
t
])
r
t
= σ (W
r
∗ [h
t−1
;x
t
])
˜
h
t
= tanh(W ∗ [r
t
∗ h
t−1
;x
t
])
h
t
= (1 − z
t
) ∗ h
t−1
+ z
t
∗
˜
h
t
(3)
where x
t
is the input at time t. z
t
and r
t
are the update
and reset gates at time t, respectively. h
t
is the hidden
state at time t, while
˜
h
t
is the new candidate mem-
ory cell at time t. Symbols (σ) and (tanh) denote the
Sigmoid and hyperbolic tangent activation functions,
respectively, whereas ([;]) and (∗) represent concate-
nation and the element-wise multiplication.
The encoder is simply a GRU layer used to se-
quentially encode the outputs of the spatial compo-
nent with a zero-initiated hidden state. It iterates over
the spatial component’s output as described in equa-
tion 3. The decoder alters the concatenation-based at-
tention weights stated in (Luong et al., 2015). This
attention mechanism is chosen here to offer a straight-
forward approach for generating the temporal output,
one step at a time. The decoder’s hidden state at time
t-1, h
dec
t−1
is considered as the query q, and the en-
coder’s hidden states, enc
o
, as the keys K. This pro-
cess is done by concatenating the query and keys, the
parenthesis [;] in Algorithm 2, and applying a linear
layer followed by Softmax. Since there is no h
dec
t−1
at
the beginning of the process, it is initialized with the
last encoder’s hidden state, h
enc
D−1
. The resulting at-
tention weights are then multiplied with the previous
output of the model, y
t−1
, which is considered as the
values matrix V, unlike the traditional mechanism that
considers h
dec
t−1
to be the V. At this step, the GRU
cell is utilized as stated in equation 3, where the input
Algorithm 2: Temporal component.
Input: Input sequence X
s
Result: Output sequence X
o
Encoder:
for i = 0 to D do
h
enc
i
← GRUCell(X
s
i
,h
enc
i−1
)
h
enc
i−1
← h
enc
i
enc
o
← append(h
enc
i
)
end
Decoder:
for t ← 0 to τ do
scores ← Linear(concat[h
dec
t−1
,enc
o
])
w
t
← So f tmax(scores)
X
gru
t
← w
t
· y
t−1
h
dec
t
← GRUCell(y
t−1
,X
gru
t
)
X
o
t
← Linear(h
dec
t
)
y
t−1
← X
o
t
X
o
← append(X
o
t
)
end
is the previous model’s output and the hidden state is
the result of the attention mechanism. The output of
each iteration is then concatenated to form the final
output of the model. A comprehensive elucidation of
the temporal aspect and matrix dimensions at every
step is offered in algorithm 2.
4 PRACTICAL ANALYSIS
4.1 Dataset
ST-MHA is trained and evaluated on a real-world
dataset collected from the highways of Los Angeles
city via loop detectors. As in (Zhao et al., 2020),
speed data of N=207 detectors are chosen from the
1st of March till the 7th of March, 2012. Missing data
were amputated using linear interpolation. The result-
ing values are normalized between zero and one, then
reverted to their original scale at the end of the train-
ing for better results interpretation. Fig. 2 illustrates
the distribution of the road detectors over the city of
Los Angeles (Lu et al., 2020).
Traffic speeds are aggregated every 5 minutes to
form 2016 data points for each traffic speed detec-
tor, where the training is run on 80% of the data or
1612*207 points. The remaining 20%, or 404*207
points, are used to evaluate the model. Two hours of
past data are used as inputs to predict the next 15, 30,
and 45 minutes of future traffic speeds.
Spatio-Temporal Traffic Prediction for Efficient ITS Management
49

Figure 2: Distribution of detectors over the highways of Los
Angeles County (METR-LA).
4.2 Evaluation Metrics
Four evaluation metrics are used to evaluate the per-
formance of the ST-MHA model based on ground
truth values Y
t
and predicted ones
ˆ
Y
t
. These met-
rics are the Mean Squared Error (MSE), Root Mean
Squared Error (RMSE), Mean Absolute Error (MAE),
and Mean Absolute Percentage Error (MAPE), which
are given as in the equations 4, 5, 6, and 7, respec-
tively. MSE is the average of the squared differences
between the actual and predicted values, offering a
measure to assess the average squared deviation be-
tween ground truth and predictions. However, its in-
terpretability is hindered by the squaring operation.
RMSE is the square root of MSE, and it shares the
same unit as the original data, making it more inter-
pretable. Both MSE and RMSE give higher weight to
large errors due to squaring, making them sensitive to
outliers. MAE, on the other hand, represents the aver-
age of the absolute differences between the actual and
estimated values. MAE is less sensitive to outliers
compared to MSE and RMSE and is often preferred
when outliers are present and a more balanced view
of the errors is needed. MAPE is a percentage that
describes the size of the errors compared to the actual
values. MAPE has a big limit when actual values are
close to zero, which can produce an overshoot MAPE
value. Therefore, zero values in Y were exempt while
calculating the MAPE.
MSE =
1
n
n
∑
i=1
(y
i
− ˆy
i
)
2
(4)
RMSE =
s
1
n
n
∑
i=1
(y
i
− ˆy
i
)
2
(5)
MAE =
1
n
n
∑
i=1
(y
i
− ˆy
i
) (6)
MAPE =
100
n
n
∑
i=1
|y
i
− ˆy
i
|
|y
i
|
(7)
4.3 Model Parameters Designing
Two of the main parameters of ST-MHA are the
model’s hidden size and the number of heads H.
Each one of these parameters can significantly affect
the prediction results of ST-MHA. After conducting
many experiments, the hidden size of D=128 units
and H=8 are chosen as they provide the best perfor-
mance results. Another less important parameter is
the learning rate, lr hereafter, which describes the step
by which the model is modified. lr is initiated to 0.01
and is decreased by 90% every 1000 iterations.
Due to the limited number of data samples in the
time domain, the batch size is chosen to be relatively
small, at eight samples per iteration, to enable a larger
number of training iterations per epoch. All experi-
ments are conducted over 200 epochs, where 24 past
values (equivalent to 2 hours) are used as inputs into
the model, while the prediction horizons utilized as
outputs are 15, 30, and 45 minutes.
4.4 Results and Discussion
Three benchmark models are employed to validate
our model, ST-MHA. These models are chosen to
cover the temporal, spatial, and spatio-temporal ap-
proaches. The first is an RNN Encoder–Decoder
model (Cho et al., 2014b), encoder-decoder hereafter,
where vanilla RNNs are replaced with GRU units for
better prediction accuracy. Second is a GCN model
(Kipf and Welling, 2017) that uses the spatial fea-
tures to predict future traffic speeds. The third is the
state-of-the-art spatio-temporal model TGCN, which
is configured with a model’s hidden size of 64, as re-
ported by the authors, to achieve the best results (Zhao
et al., 2020). As shown in Table 1, our model pro-
duced superior results in all metrics with relatively
stable outcomes as the prediction horizon increases.
The spatial model, GCN, demonstrates relatively
stable results, where the difference in training results
does not dramatically change as the prediction hori-
zon increases. Yet, it still performs poorer than the
temporal model when dealing with a short predic-
tion horizon at a 15-minute horizon. Nevertheless,
ST-MHA achieved improved prediction accuracy by
at least 26.43%, 14.23%, 21.47%, and 18.57% for
MSE, RMSE, MAE, and MAPE, respectively, across
all prediction horizons.
The encoder-decoder model showed relatively
good results for a short prediction period, while it
struggles to forecast longer horizons. ST-MHA per-
formed better than the encoder-decoder model in all
horizons and metrics. With ST-MHA, MSE, RMSE,
MAE, and MAPE are decreased by 12.65%, 6.55%,
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
50

Table 1: Prediction results for 15, 30, and 45 minutes.
15 min encoder-decoder GCN TGCN ST-MHA
MSE 53.59 67.92 54.76 46.81
RMSE 7.32 8.24 7.4 6.84
MAE 4.56 5.63 5.085 4.38
MAPE 13.52% 15.6% 14.086% 12.003%
30 min encoder-decoder GCN TGCN ST-MHA
MSE 102.07 78.5 77.93 55.88
RMSE 10.1 8.86 8.83 7.47
MAE 6.38 5.94 6.07 4.55
MAPE 20.22% 17.17% 17.83% 13.98%
45 min encoder-decoder GCN TGCN ST-MHA
MSE 113.72 87.41 88.79 64.3
RMSE 10.66 9.34 9.42 8.01
MAE 7.1 6.24 6.39 4.9
MAPE 20.8% 18.35% 19.3 % 14.44%
3.94%, and 11.22%, respectively, for the 15-minute
prediction horizon, while attaining a reduction of
45.25%, 26.03%, 28.68%, 30.86%, respectively, for
the 30-minute, and 43.45%, 24.85%, 30.98%, and
30.57%, for the 45-minute forecasting horizon.
Compared to the TGCN model, ST-MHA scored
a drop of 14.51%, 7.56%, 13.86%, and 14.78% on
MSE, RMSE, MAE, and MAPE, respectively, for the
15-minute prediction horizon. And the enhancement
is becoming better for larger prediction horizons.
For the 30-minute prediction horizon, for example,
ST-MHA achieved a decrease of 28.29%, 15.402%,
25.04%, and 21.59% in MSE, RMSE, MAE, and
MAPE, respectively, while for the 45-minute horizon
is 27.58%, 14.96%, 23.31%, 25.18%, respectively.
Our algorithm runs fast, making it suitable for
real-time traffic prediction. For example, for a 15-
minute prediction horizon, it takes 06.66 seconds to
predict future values. Given that the sample size is 5
minutes, predictions can be made while new samples
are being received, ensuring real-time functionality.
5 CONCLUSIONS
This paper presents the novel Spatio-Temporal Multi-
Head Attention model, ST-MHA, to solve the prob-
lem of jointly incorporating spatial and temporal traf-
fic characteristics without relying on initial adjacency
matrices or utilizing graph structures. Instead, spa-
tial characteristics are captured internally through
the modified multi-head attention mechanism, which
considers the interactions among traffic speeds over
various time segments, referred to as heads. Our
model incorporates this information with the temporal
component to accurately predict future traffic speeds.
Employing ST-MHA can significantly help to manage
and improve traffic conditions, a critical aspect of In-
telligent Transportation Systems (ITS). By accurately
predicting traffic patterns, authorities gain valuable
insights to make well-informed decisions aimed at al-
leviating congestion and enhancing traffic flow. To
ensure the efficiency of our model, ST-MHA is com-
pared with three baseline models: one employs tem-
poral data, another utilizes spatial data, and the third
uses spatio-temporal data. Our model demonstrates
significant improvement over these models across
various prediction horizons in four key metrics: MSE,
RMSE, MAE, and MAPE. Although our method is
computationally efficient, integrating lower-cost at-
tention techniques, such as sparse attention, could im-
prove its functionality for longer sequences and pro-
vide a promising avenue for future research.
REFERENCES
Agarap, A. F. (2018). Deep learning using rectified linear
units (relu). arXiv preprint arXiv:1803.08375.
Ahmed, M. S. and Cook, A. R. (1979). Analysis of free-
way traffic time-series data by using Box-Jenkins tech-
niques. Number 722.
ArunKumar, K., Kalaga, D. V., Mohan Sai Kumar, C.,
Kawaji, M., and Brenza, T. M. (2022). Compar-
ative analysis of gated recurrent units (gru), long
short-term memory (lstm) cells, autoregressive inte-
grated moving average (arima), seasonal autoregres-
sive integrated moving average (sarima) for forecast-
ing covid-19 trends. Alexandria Engineering Journal,
61(10):7585–7603.
Bai, J., Zhu, J., Song, Y., Zhao, L., Hou, Z., Du, R., and Li,
H. (2021). A3t-gcn: Attention temporal graph convo-
lutional network for traffic forecasting. ISPRS Inter-
national Journal of Geo-Information, 10(7).
Spatio-Temporal Traffic Prediction for Efficient ITS Management
51

Castro-Neto, M., Jeong, Y.-S., Jeong, M.-K., and Han, L. D.
(2009). Online-svr for short-term traffic flow predic-
tion under typical and atypical traffic conditions. Ex-
pert systems with applications, 36(3):6164–6173.
Chen, W., Chen, L., Xie, Y., Cao, W., Gao, Y., and Feng,
X. (2019). Multi-range attentive bicomponent graph
convolutional network for traffic forecasting. In AAAI
Conference on Artificial Intelligence.
Cho, K., Van Merri
¨
enboer, B., Bahdanau, D., and Bengio,
Y. (2014a). On the properties of neural machine trans-
lation: Encoder-decoder approaches. arXiv preprint
arXiv:1409.1259.
Cho, K., Van Merri
¨
enboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014b).
Learning phrase representations using rnn encoder-
decoder for statistical machine translation. arXiv
preprint arXiv:1406.1078.
Dougherty, M. S. and Cobbett, M. R. (1997). Short-term
inter-urban traffic forecasts using neural networks. In-
ternational journal of forecasting, 13(1):21–31.
Gori, M., Monfardini, G., and Scarselli, F. (2005). A new
model for learning in graph domains. In Proceedings.
2005 IEEE International Joint Conference on Neural
Networks, 2005., volume 2, pages 729–734 vol. 2.
Hochreiter, S. (1998). The vanishing gradient problem dur-
ing learning recurrent neural nets and problem solu-
tions. International Journal of Uncertainty, Fuzziness
and Knowledge-Based Systems, 6(02):107–116.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Hua, J. and Faghri, A. (1994). Apphcations of artificial neu-
ral networks to intelligent vehicle-highway systems.
Transportation Research Record, 1453:83.
Huang, R., Huang, C., Liu, Y., Dai, G., and Kong, W.
(2020). Lsgcn: Long short-term traffic prediction with
graph convolutional networks. In IJCAI, volume 7,
pages 2355–2361.
Jiang, W. and Luo, J. (2022). Graph neural network for
traffic forecasting: A survey. Expert Systems with Ap-
plications, 207:117921.
Jin, X., Zhang, Y., and Yao, D. (2007). Simultaneously pre-
diction of network traffic flow based on pca-svr. In
Advances in Neural Networks–ISNN 2007: 4th Inter-
national Symposium on Neural Networks, ISNN 2007,
Nanjing, China, June 3-7, 2007, Proceedings, Part II
4, pages 1022–1031. Springer.
Kaffash, S., Nguyen, A. T., and Zhu, J. (2021). Big data al-
gorithms and applications in intelligent transportation
system: A review and bibliometric analysis. Interna-
tional Journal of Production Economics, 231:107868.
Kamarianakis, Y. and Prastacos, P. (2003). Forecasting traf-
fic flow conditions in an urban network: Compari-
son of multivariate and univariate approaches. Trans-
portation Research Record, 1857(1):74–84.
Karlaftis, M. G. and Vlahogianni, E. I. (2011). Statisti-
cal methods versus neural networks in transportation
research: Differences, similarities and some insights.
Transportation Research Part C: Emerging Technolo-
gies, 19(3):387–399.
Kipf, T. N. and Welling, M. (2017). Semi-Supervised Clas-
sification with Graph Convolutional Networks. In
Proceedings of the 5th International Conference on
Learning Representations, ICLR ’17.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Ledoux, C. (1997). An urban traffic flow model integrat-
ing neural networks. Transportation Research Part C:
Emerging Technologies, 5(5):287–300.
Lee, S. and Fambro, D. B. (1999). Application of subset
autoregressive integrated moving average model for
short-term freeway traffic volume forecasting. Trans-
portation research record, 1678(1):179–188.
Levin, M. and Tsao, Y.-D. (1980). On forecasting freeway
occupancies and volumes (abridgment). Transporta-
tion Research Record, (773).
Levy, J. I., Buonocore, J. J., and Von Stackelberg, K. (2010).
Evaluation of the public health impacts of traffic con-
gestion: a health risk assessment. Environmental
health, 9:1–12.
Li, M. and Zhu, Z. (2021). Spatial-temporal fusion graph
neural networks for traffic flow forecasting. Proceed-
ings of the AAAI Conference on Artificial Intelligence,
35(5):4189–4196.
Li, Y. and Shahabi, C. (2018). A brief overview of machine
learning methods for short-term traffic forecasting and
future directions. Sigspatial Special, 10(1):3–9.
Li, Y., Yu, R., Shahabi, C., and Liu, Y. (2018). Diffusion
convolutional recurrent neural network: Data-driven
traffic forecasting. In International Conference on
Learning Representations.
Lu, H., Huang, D., Song, Y., Jiang, D., Zhou, T., and Qin, J.
(2020). St-trafficnet: A spatial-temporal deep learning
network for traffic forecasting. Electronics, 9(9).
Luong, M.-T., Pham, H., and Manning, C. D. (2015). Ef-
fective approaches to attention-based neural machine
translation. arXiv preprint arXiv:1508.04025.
Qi, J., Zhao, Z., Tanin, E., Cui, T., Nassir, N., and Sarvi,
M. (2022). A graph and attentive multi-path convo-
lutional network for traffic prediction. IEEE Transac-
tions on Knowledge and Data Engineering.
Rahmani, S., Baghbani, A., Bouguila, N., and Patterson, Z.
(2023). Graph neural networks for intelligent trans-
portation systems: A survey. IEEE Transactions on
Intelligent Transportation Systems, 24(8):8846–8885.
Roy, A., Roy, K. K., Ahsan Ali, A., Amin, M. A., and Rah-
man, A. K. M. M. (2021). Sst-gnn: Simplified spatio-
temporal traffic forecasting model using graph neural
network. In Karlapalem, K., Cheng, H., Ramakrish-
nan, N., Agrawal, R. K., Reddy, P. K., Srivastava, J.,
and Chakraborty, T., editors, Advances in Knowledge
Discovery and Data Mining, pages 90–102, Cham.
Springer International Publishing.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Learning representations by back-propagating errors.
nature, 323(6088):533–536.
Su, H., Zhang, L., and Yu, S. (2007). Short-term traffic
flow prediction based on incremental support vector
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
52

regression. In Third international conference on natu-
ral computation (ICNC 2007), volume 1, pages 640–
645. IEEE.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Veli
ˇ
ckovi
´
c, P., Cucurull, G., Casanova, A., Romero, A., Lio,
P., and Bengio, Y. (2017). Graph attention networks.
arXiv preprint arXiv:1710.10903.
Wang, F.-Y. (2010). Parallel control and management for
intelligent transportation systems: Concepts, architec-
tures, and applications. IEEE Transactions on Intelli-
gent Transportation Systems, 11(3):630–638.
Williams, B. M. (2001). Multivariate vehicular traffic flow
prediction: evaluation of arimax modeling. Trans-
portation Research Record, 1776(1):194–200.
Williams, B. M. and Hoel, L. A. (2003). Modeling and fore-
casting vehicular traffic flow as a seasonal arima pro-
cess: Theoretical basis and empirical results. Journal
of transportation engineering, 129(6):664–672.
Yuan, T., Da Rocha Neto, W., Rothenberg, C. E., Obraczka,
K., Barakat, C., and Turletti, T. (2022). Machine
learning for next-generation intelligent transporta-
tion systems: A survey. Transactions on emerging
telecommunications technologies, 33(4):e4427.
Zhang, K. and Batterman, S. (2013). Air pollution and
health risks due to vehicle traffic. Science of the to-
tal Environment, 450:307–316.
Zhao, L., Song, Y., Zhang, C., Liu, Y., Wang, P., Lin,
T., Deng, M., and Li, H. (2020). T-gcn: A tempo-
ral graph convolutional network for traffic prediction.
IEEE Transactions on Intelligent Transportation Sys-
tems, 21(9):3848–3858.
Zheng, C., Fan, X., Wang, C., and Qi, J. (2020). Gman:
A graph multi-attention network for traffic prediction.
In Proceedings of the AAAI conference on artificial
intelligence, volume 34, pages 1234–1241.
Zhou, J., Cui, G., Hu, S., Zhang, Z., Yang, C., Liu, Z.,
Wang, L., Li, C., and Sun, M. (2020). Graph neu-
ral networks: A review of methods and applications.
AI Open, 1:57–81.
Spatio-Temporal Traffic Prediction for Efficient ITS Management
53
