Simultaneous Estimation of Driving Intentions for Multiple Vehicles
Using Video Transformer
Junya Isogawa, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Nagoya 466-8555, Japan
{isogawa@cv., sakaue@, junsato@}nitech.ac.jp
Keywords:
Driving Intention, Multiple Vehicles, Multiple Drivers, Vehicle Trajectory, Video Transformer.
Abstract:
In autonomous driving, it is important for the vehicle to appropriately determine the next action to be taken
on the road. In complex situations such as on public roads, the better action for the own vehicle can be
determined by considering the driving intention of other vehicles around the vehicle. Thus, in this paper, we
propose a method to determine the next action of the own vehicle by simultaneously estimating the next driving
intentions of all vehicles, including other vehicles around the own vehicle. The time series of vehicle motions
on the road can be represented as sequential images centered on the vehicle. In this paper, we analyze the
sequential images of vehicle trajectories using the Video Transformer and simultaneously predict the driving
intentions of all vehicles on the road. In general, driving intentions change over time. Thus, in this research,
we first propose a method to predict the next intention, and then extend it to predict the transition of driving
intentions over the next few seconds. We also apply our method to predict driving trajectories, and show that
the prediction of the driving trajectory can be improved by using the driving intentions estimated from the
proposed method.
1 INTRODUCTION
Autonomous driving technology is very important
for reducing traffic accidents and improving the ef-
ficiency of logistics, and many research and develop-
ment projects (Bojarski et al., 2016; Codevilla et al.,
2018; Grigorescu et al., 2020) have been conducted
on it. Autonomous driving is realized by bringing to-
gether technologies from various fields, and among
them, determining the optimal behavior from observ-
ing traffic conditions is an essential technology for au-
tonomous driving.
In the existing research on vehicle behavior de-
cisions, people have determined the vehicle’s trajec-
tory from the observed traffic conditions (Jeong et al.,
2017; Hegde et al., 2020; Richardos et al., 2020).
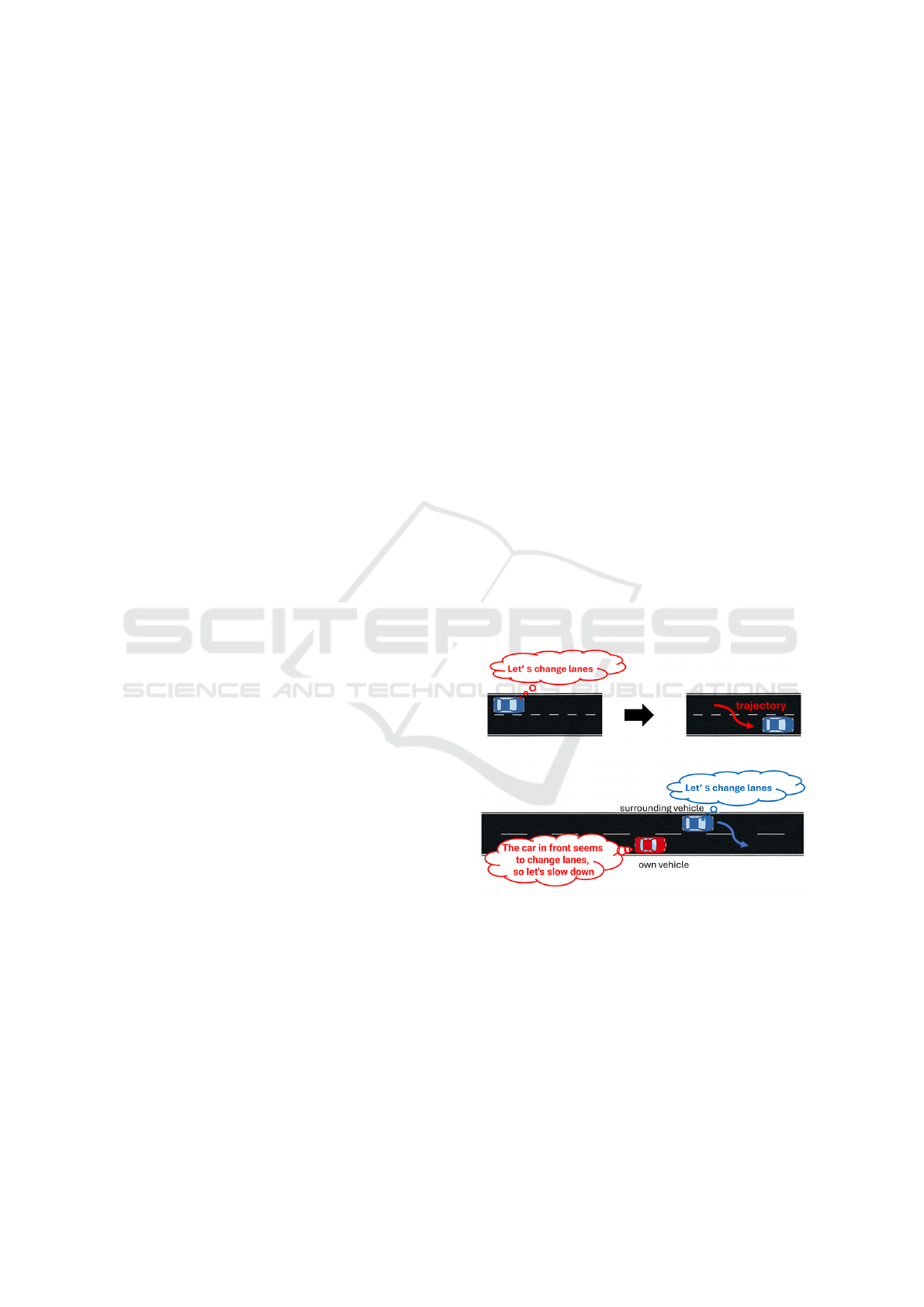
However, when a human drives a vehicle, as shown in
Figure 1 (a), first the driving intention, such as ”let’s
change lanes,” is determined, and then a driving tra-
jectory is generated based on the intention. There-
fore, in this research, we consider the driving inten-
tion to be important information that is the source of
trajectory generation, and propose a method to deter-
mine the driving intention that the vehicle should take
next. By accurately determining the next intention to
be taken in this way, the trajectory generation in au-
(a) Driving intentions generate trajectories
(b) Interaction of intentions among vehicles
Figure 1: (a) Driving intention is important information that
is the basis for trajectory generation. (b) By predicting the
driving intentions of surrounding vehicles, we can deter-
mine better driving intentions for the own vehicle.
tonomous driving can be made more accurate.
The intention of the vehicle is not determined in-
dependently by the vehicle. For example, in Figure 1
(b), the vehicle ahead is trying to change lanes, so the
vehicle generates an intention to decelerate. In this
way, the vehicle’s intention is determined taking into
Isogawa, J., Sakaue, F. and Sato, J.
Simultaneous Estimation of Driving Intentions for Multiple Vehicles Using Video Transformer.
DOI: 10.5220/0013232100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
471-477
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
471
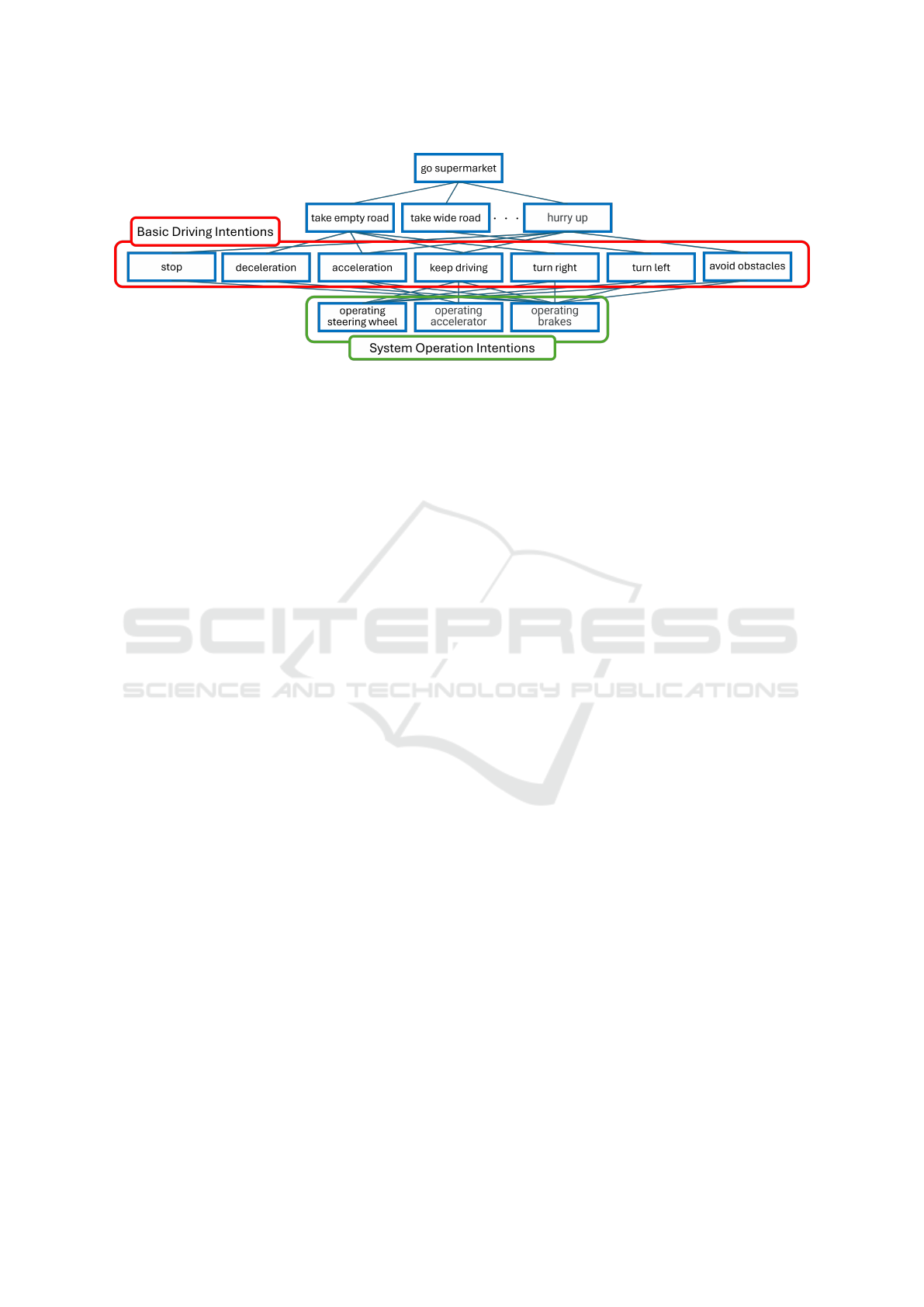
Figure 2: Hierarchy of driving intentions. Driving intentions range from high-level intentions to low-level intentions, and
these are thought to have a hierarchical structure. The intentions that are directly required for the autonomous driving system
are the system operation intentions. In order to determine the system operation intentions, it is important to appropriately
determine the basic driving intentions shown in the red frame. In this research, we estimate these 7 basic intentions from
vehicle trajectories. Complex behavior in various situations on public roads can be expressed by combinations of these 7
basic driving intentions.
account the intentions of other vehicles. Therefore,
each vehicle can determine better driving behavior by
predicting the driving intentions that the surrounding
vehicles will take at the next time.
Research on predicting trajectories that consider
interactions among multiple vehicles has been con-
ducted in the past (Mo et al., 2020; Zhang et al., 2020;
Dai et al., 2021; Chen and Krahenbuhl, 2022). How-
ever, these studies aimed to estimate vehicle trajecto-
ries, and did not estimate the driver’s intention, which
is the important source of these vehicle trajectories.
Thus, in this research, we propose a method to si-
multaneously predict the intentions of the vehicle and
surrounding vehicles while considering interactions
between vehicles. By extracting the driving intention
of the own vehicle from the predicted intentions of
all vehicles, the own vehicle can determine the best
driving intention to be taken next even in complex sit-
uations.
Technologies for estimating driving intentions
have been proposed in the past (Han et al., 2019;
Huang et al., 2022). However, these were limited to
estimating simple intentions such as lane changes on
straight roads and right and left turns at intersections,
and could not handle driving intentions in complex
situations such as waiting for a straight vehicle com-
ing from ahead before turning right at an intersection.
In this research, we estimate the best driving inten-
tion that the own vehicle should take in such a com-
plex situation by simultaneously estimating the driv-
ing intentions of the surrounding vehicles along with
the driving intention of the own vehicle. By using the
driving intentions estimated in this way, it is expected
that we can generate more accurate driving trajecto-
ries.
2 SIMULTANEOUS PREDICTION
OF DRIVING INTENTIONS
FOR MULTIPLE VEHICLES
2.1 Driving Intentions
We first discuss the driving intentions we consider in
this paper.
In general, there are various levels of intentions
that drivers have while driving (Azad et al., 2020; Al-
brecht and Bartneck, 2019). These range from high-
level intentions such as ”I want to go to the supermar-
ket” to low-level intentions such as ”Turn the steering
wheel to the right”, and these are thought to have a
hierarchical structure as shown in Figure 2.
In autonomous driving, the intentions that are di-
rectly required for the system to operate the steer-
ing wheel and brakes are the system operation inten-
tions shown in the green frame in Figure 2. In order
to determine these system operation intentions, it is
important to appropriately determine the driving in-
tentions shown in the red frame that are located just
above the system operation intentions and are the ba-
sis for deciding these intentions. Therefore, in this
research, we define 7 basic driving intentions, which
are “stop”, “deceleration”, “acceleration”, “keep driv-
ing”, “turn right”, “turn left”, and “avoid obstacles”,
and consider estimating them. Complex behavior in
various situations on public roads can be expressed
by combinations of these 7 basic driving intentions.
For example, when making a right turn at an inter-
section and an oncoming vehicle is approaching, the
vehicle will first generate the intention to ”stop” at
the intersection, generate the intention to ”turn right”
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
472
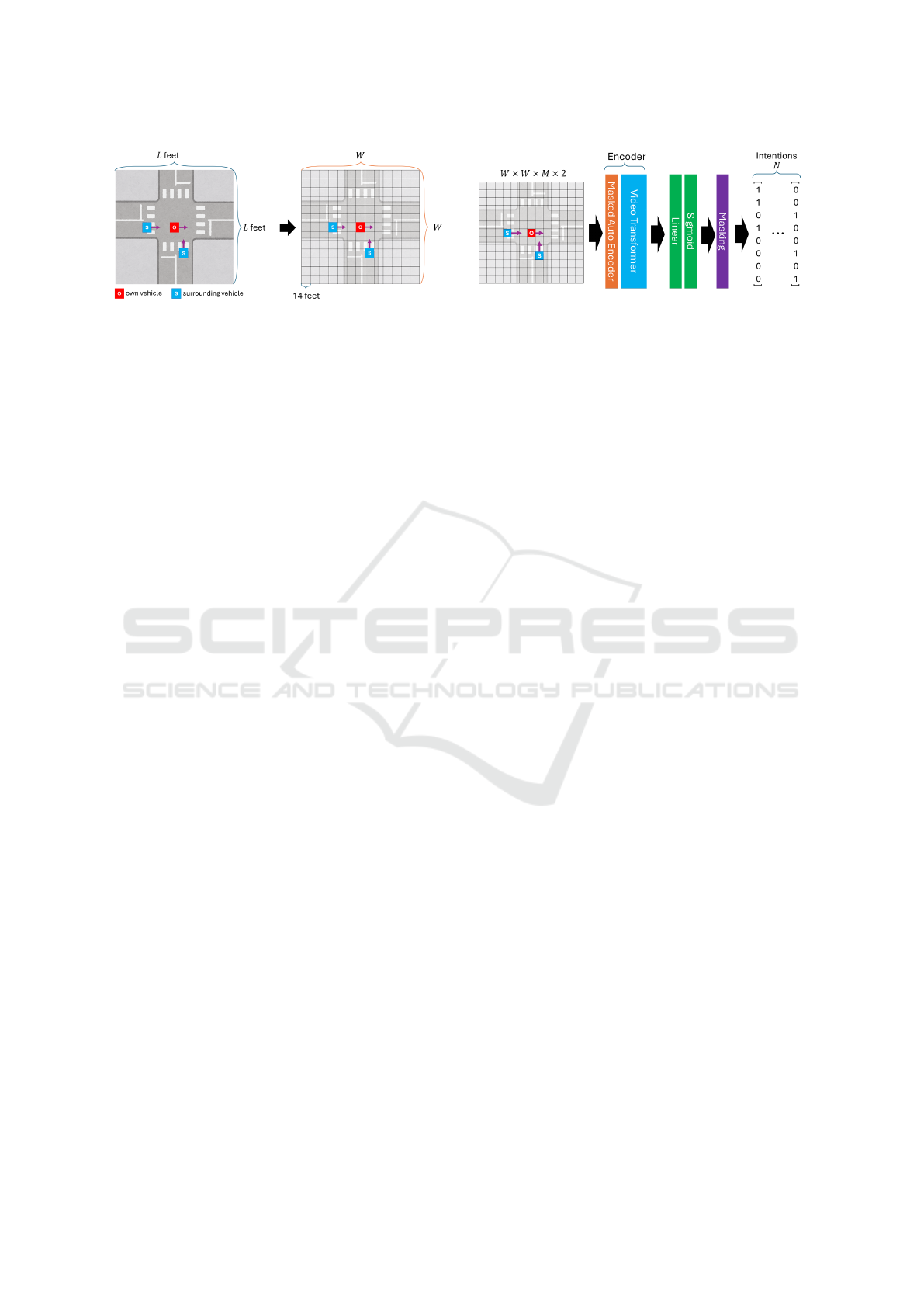
Figure 3: Network input.
once the oncoming vehicle has passed, and generate
the intention to ”keep driving” once the right turn is
complete. In this research, we estimate the combina-
tion of these 7 basic intentions that the vehicle should
take and their transition over time. In the following,
the number of basic intentions will be referred to as I.
That is I = 7.
2.2 Network Input and Output
Next, we explain the input to the network. In this
research, in order to handle various road conditions
on general roads, such as straight roads and intersec-
tions, we consider a square area of L feet × L feet
centered on the own vehicle at each time instant, as
shown in Figure 3, and input the trajectories of all
vehicles within this area. In this research, vehicles
other than the own vehicle within this area are called
surrounding vehicles. This area is discretized into 14
feet, which corresponds to the size of one vehicle, and
expressed as a W ×W array. In this research, we set
L = 182 feet, and W = 13, so the total number N of
array elements is 169 (= 13 × 13).
Then, the trajectory of each vehicle in T
I
seconds
is divided into M, and M pairs of X and Y coordinates
of the trajectory is stored in the vehicle position in
the array. This array is considered to be a time-series
image tensor of W × W × M × 2, and is used as the
input to our network. In this research, we consider
vehicle trajectory in T
I
= 6 seconds and it is divided
into M = 60 for every 1/10 second.
The output is the intentions occurring in the T
O
seconds following the input trajectory for each vehi-
cle in the W × W image area. In other words, it is
the probability for each of the seven driving inten-
tions defined in the previous section. If the proba-
bility of a certain intention for a certain vehicle ex-
ceeds a threshold, the vehicle is considered to have
the intention, and a multi-hot vector of intentions is
obtained. In this way, a set of driving intentions the
vehicle should take in the next T
O
seconds is deter-
mined at each pixel of the W ×W image area. In this
research, we set T
O
= 5 seconds.
Figure 4: Network for intention prediction.
2.3 Network Structure and Training
Next, we describe the network structure and training
for predicting driving intentions. The overall network
structure is shown in Figure 4. The network first in-
puts a W ×W × M × 2 image tensor into an encoder
consisting of Masked Auto Encoder (He et al., 2021)
and Video Transformer (Bertasius et al., 2021) to ob-
tain the features of the vehicle trajectory. Then, the
probability for each driving intention is computed us-
ing a fully connected layer and a sigmoid function
prepared for each driving intention. Finally, the ob-
tained probabilities are thresholded to obtain a multi-
hot vector of the driving intention at each pixel of the
N (= W ×W ) image area.
This network is trained by minimizing the loss
Loss1, which consists of the cross entropy between
the true value and the estimated value of all intentions
for all image pixels, as follows:
Loss1 = −
N
∑
n=1
I
∑
i=1
p
v
(n,i) logq
v
(n,i) (1)
where, p
v
(n,i) and q
v
(n,i) represent the true and esti-
mated probability of the driving intention i at the nth
pixel, respectively.
2.4 Predicting Temporal Transition of
Intention
So far, we have explained a method that outputs a
multi-hot vector of driving intentions, but this method
derives only a combination of basic intentions to be
taken in a target scene, and it is unclear in what order
and at what timing these should be taken. Therefore,
next we will describe a method to derive the temporal
transition of multiple intentions to be taken in each
situation.
For deriving the temporal transition of multiple in-
tentions, no thresholding is performed, and the intent
probability is output at each time instant, as shown in
Figure 5. In this research, each T
O
-second data is di-
vided into M
O
, and the transitions of driving intention
over T
O
seconds are predicted every T
O
/M
O
second.
In this research, we set T
O
= 5 seconds and M
O
= 50.
Simultaneous Estimation of Driving Intentions for Multiple Vehicles Using Video Transformer
473

Table 1: Definition of intention.
intention definition
stop speed is less than 10km/h
deceleration speed decreases by more than 10km/h per second
acceleration speed increases by more than 10km/h per second
turn right direction changes to the right by more than 6 degrees per second
turn left direction changes to the left by more than 6 degrees per second
avoid obstacles vehicle in front moves behind the own vehicle
keep driving speed is more than 10km/h and speed change is less than 10km/h
Figure 5: Network for intention transition prediction.
The network is trained by minimizing the loss
Loss2, which is the sum of the cross entropy errors
of intentions for all pixels at all times, as follows:
Loss2 = −
M
O
∑
m=1
N
∑
n=1
I
∑
i=1
p
v
(m,n, i)log q
v
(m,n, i)
(2)
where, p
v
(m,n) and q
v
(m,n) represent the true and
estimated probability distributions of the driving in-
tention at the nth pixel at time m, respectively.
This method can estimate the transition of driving
intentions every T
O
/M
O
second, making it possible
to determine the transition of system operation inten-
tions. Since the proposed method simultaneously pre-
dicts the driving intentions of all vehicles, it enables
us to predict the transition of driving intention in com-
plex situations where we need interaction with other
vehicles.
3 PREDICTING DRIVING
TRAJECTORY BASED ON
DRIVING INTENTION
PREDICTION
The driving intentions predicted by the proposed
method can be used not only as the next driving be-
havior to be taken by the vehicle, but also to predict
the driving trajectory of the vehicle. In this section,
we show a method to improve the accuracy of esti-
mating the driving trajectory of vehicles by using the
Figure 6: Network for trajectory prediction.
driving intentions of vehicles estimated using the pro-
posed method.
In this method, as shown in Figure 6, an LSTM
Decorder (Hochreiter and Schmidhuber, 1997) and a
fully connected layer are added to the network that
predicts the driving intentions, and vehicle trajecto-
ries are predicted from the predicted driving inten-
tions obtained by the method described in the previ-
ous section and the features extracted by the Encoder.
The predicted trajectory (time-series position infor-
mation) of each vehicle is computed by dividing T
O
seconds of data into M
O
, and saving pairs of X and
Y coordinates every T
O
/M
O
seconds. Again, we set
T
O
= 5 seconds and M
O
= 50.
To train this network, the trajectory loss Loss tra j
is defined as follows:
Loss tra j =
v
u
u
t
1
N × M
O
N
∑
n=1
M
O
∑
m=1
||x
nm
−
ˆ
x
nm
||
2
(3)
where, x
nm
is the true values of the X and Y coordi-
nates of vehicle n at time m, and
ˆ
x
nm
is the coordinates
predicted by the network. By adding this trajectory
loss Loss tra j to the intention loss Loss2 defined in
equation (2), we define the loss Loss3 for training the
trajectory prediction network as follows:
Loss3 = Loss2 +Loss tra j (4)
The trajectory prediction network is trained by mini-
mizing Loss3.
4 DATASET
To train the proposed intention prediction network
and trajectory prediction network, we need a large
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
474
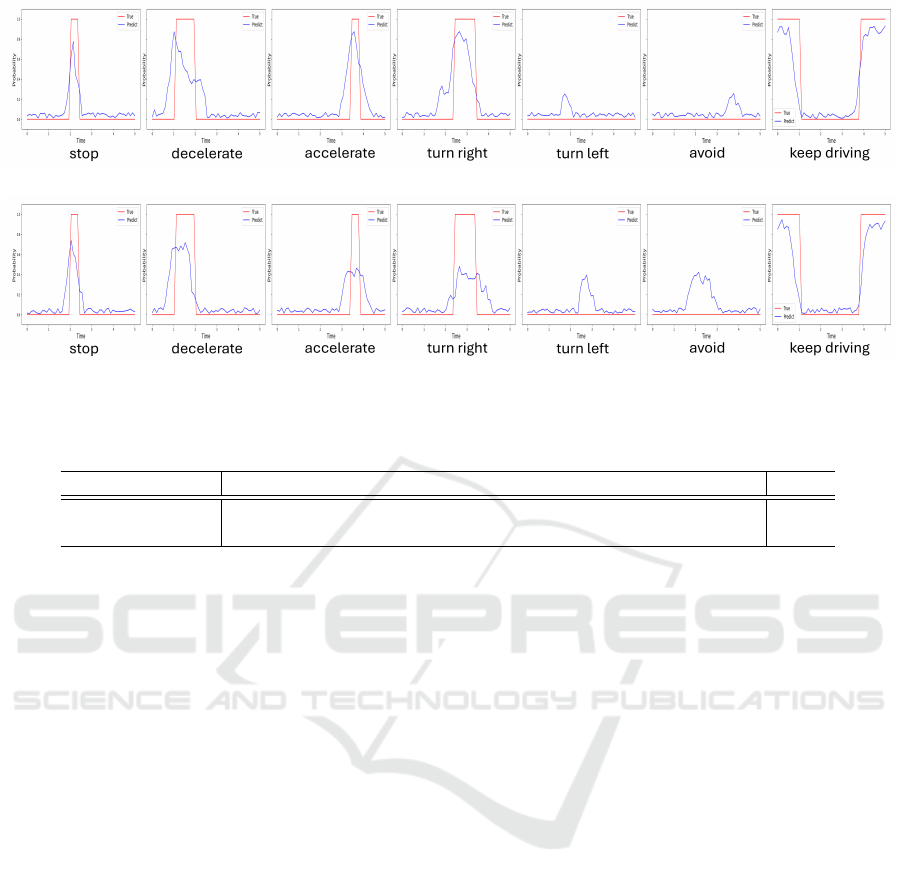
(a) proposed.
(b) Own vehicle only.
Figure 7: Predicted transitions of intention.
Table 2: Accuracy of driving intention prediction.
stop decel. accel. driving turn right turn left avoid total
proposed 85.31 80.26 81.01 89.44 79.13 73.81 76.44 85.08
own vehicle only 86.27 77.43 78.11 89.49 77.06 70.22 78.77 82.61
number of pairs of trajectories and intentions of the
own vehicle and surrounding vehicles. In this re-
search, we use Argoverse2 (Wilson et al., 2023) as the
basis dataset, which consists of real vehicle trajecto-
ries captured at 10 Hz for 11 seconds. In this research,
we used the first 6 seconds in the 11-second data to
estimate the driving intentions and trajectories for the
following 5 seconds. Since there is no intention infor-
mation in this dataset, we added the intention of each
vehicle based on the trajectory of the vehicle.
Intent information is added in a rule-based manner
based on the trajectory information. For each of the
driving intentions, the definitions shown in Table 1 are
applied, and intention information is generated from
the trajectory information following these definitions.
Since each trajectory data may contain multiple inten-
tions, we allowed multiple driving intentions to be set
for each data.
In this way, a dataset was constructed by creating
12,000 pairs of data consisting of trajectories and in-
tentions for the own vehicle and surrounding vehicles.
5 EXPERIMENTS
Using the proposed method, we predicted the inten-
tions of all vehicles based on the past trajectories of
the own vehicle and its surrounding vehicles.
10,000 data were randomly extracted from the cre-
ated dataset to serve as the training dataset, and the re-
maining 2,000 data were used as test data. The batch
size for training the network was 128, the learning rate
was 10
−6
, and training was performed for 100 epochs.
Adam (Adaptive moment estimation) (Kingma and
Ba, 2014) was used to optimize the training. Using
the network trained in this way, we predicted the in-
tentions of the test data and compared them with the
true intentions of the test data. For comparison, we
also constructed a model that only predicts the inten-
tions of the own vehicle, and compared its results with
those of the proposed method.
5.1 Prediction of Driving Intention
In Table 2, we show the prediction accuracy when
predicting multiple intentions contained in each 5-
second data as a multi-hot vector. The table shows
that the proposed method, which simultaneously pre-
dicts the intentions of all vehicles, has significantly
higher prediction accuracy for each of the 7 intentions
than the method that estimates only the own vehicle
intentions. The proposed method also has a signifi-
cantly higher accuracy in the total score of all seven
intentions. These results confirm the effectiveness of
the proposed method, which simultaneously predicts
vehicle intentions for estimating driving intentions.
Next, we show the results of predicting the tran-
sition of intention probability in Figure 7. Figure 7
(a) shows the transition of intentions estimated by the
proposed method, and Figure 7 (b) shows the result of
Simultaneous Estimation of Driving Intentions for Multiple Vehicles Using Video Transformer
475

Table 3: RMSE of predicted intention transitions.
RMSE
proposed 0.313
own vehicle only 0.322
Table 4: RMSE of predicted trajectories.
RMSE (feet)
proposed 4.92
own vehicle only 5.01
predicting only the own vehicle. The red line in the
figure is the true value of the transition of intentions,
and the blue line is the estimated value. From these
figures, we find that, for almost all intentions, the pro-
posed method can estimate the transition of intentions
closer to the true value.
Table 3 shows the results of computing the RMSE
of the predicted intention transition against the true
intention transition for all test data. As shown in this
table, the effectiveness of the proposed method for
simultaneously predicting vehicle intentions can also
be confirmed numerically.
5.2 Prediction of Driving Trajectory
Next, we show the experimental results of the trajec-
tory prediction using the intention predicted by the
proposed method. For comparison, we also show the
results of a network that predicts only the trajectory
without using the intention prediction.
Figure 8 (a) shows the prediction results of the
proposed method, and Figure 8 (b) shows the predic-
tion results when predicting only the trajectory. The
red line represents the trajectory of the own vehicle,
and the blue line represents the trajectory of the sur-
rounding vehicles. The solid lines represent the true
trajectories of each vehicle, and the dashed lines rep-
resent the predicted trajectories. In the upper case of
Figure 8, when predicting only the trajectory, the tra-
jectory of the own vehicle with the intention of turn-
ing left is not predicted well, whereas the proposed
method predicts the own trajectory correctly. In the
lower case of Figure 8, when predicting only the tra-
jectory, the trajectory of the other vehicle with the in-
tention of turning left and merging is not predicted
well, whereas the proposed method predicts it cor-
rectly.
Table 4 shows the RMSE of the predicted trajecto-
ries for all test data. In this table, the proposed method
also shows improvements in accuracy compared to
the method that predicts only the trajectory, which
confirms that intention prediction using the proposed
method is effective in improving the accuracy of tra-
jectory prediction.
(a) proposed
(a) proposed
(b) trajectory only
(b) trajectory only
Figure 8: Prediction of driving trajectory.
6 CONCLUSION
In this paper, we proposed a method to determine the
next driving intention of the own vehicle by simulta-
neously predicting the driving intentions of all vehi-
cles. We also applied the proposed method for pre-
dicting intentions to improve the accuracy of vehicle
trajectory prediction.
In the proposed method, we created a new train-
ing dataset containing true intentions and used this
for training and testing of our network, demonstrat-
ing that it is possible to predict the intention of the
own vehicle with high accuracy while taking into ac-
count interactions among multiple vehicles. We also
applied the proposed method for predicting intentions
to trajectory prediction, and showed that the accuracy
of trajectory prediction can be improved by using in-
tention prediction.
Although our method is still in its early stages, our
method to simultaneously predict the driving inten-
tions of all vehicles is promising.
REFERENCES
Albrecht, A. M. R. and Bartneck, J. A. M. C. (2019). In-
tent recognition in human-robot interaction: A review.
International Journal of Social Robotics, 11(3):355–
369.
Azad, A. K., Tiwari, N., and et al. (2020). A survey on
intention recognition in autonomous vehicles. Journal
of Autonomous Vehicles and Systems, 1:1–15.
Bertasius, G., Wang, H., and Torresani, L. (2021). Is space-
time attention all you need for video understanding?
arXiv preprint arXiv:2102.05095. Accepted to ICML
2021.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
476

Bojarski, M., Testa, D., Dworakowski, D., Firner, B., Flepp,
B., Goyal, P., Jackel, L. D., Monfort, M., Muller,
U., Zhang, J., Zhang, X., Zhao, J., and Zieba, K.
(2016). End to end learning for self-driving cars.
arXiv preprint arXiv:1604.07316.
Chen, D. and Krahenbuhl, P. (2022). Learning from all ve-
hicles. IEEE Conference on Computer Vision and Pat-
tern Recognition.
Codevilla, F., M
¨
uller, M., L
´
opez, A., Koltun, V., and Doso-
vitskiy, A. (2018). End-to-end driving via conditional
imitation learning. In IEEE International Conference
on Robotics and Automation (ICRA), pages 4693–
4700.
Dai, S., Li, L., and Li, Z. (2021). Modeling vehicle interac-
tions via modified lstm models for trajectory predic-
tion. IEEE Access, 7:2169–3536.
Grigorescu, S., Trasnea, B., Cocias, T., and Macesanu,
G. (2020). A survey of deep learning techniques
for autonomous driving. Journal of Field Robotics,
37(3):362–386.
Han, T., Jung, J., and Ozguner, U. (2019). Driving intention
recognition and lane change prediction on the high-
way. In IEEE Intelligent Vehicles Symposium.
He, K., Chen, X., Xie, S., Li, Y., Dollar, P., and Girshick,
R. (2021). Masked autoencoders are scalable vision
learners. arXiv preprint arXiv:2111.06377. Tech re-
port. v3: add robustness evaluation.
Hegde, C., Dash, S., and Agarwal, P. (2020). Vehicle trajec-
tory prediction using gan. Fourth International Con-
ference on I-SMAC (IoT in Social, Mobile, Analytics
and Cloud).
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. In Neural Computation, volume 9, pages
1735–1780.
Huang, H., Zeng, Z., Yao, D., Pei, X., and Zhang, Y. (2022).
Spatial-temporal convLSTM for vehicle driving inten-
tion prediction. Tsinghua Science and Technology,
27:599–609.
Jeong, D., Baek, M., and Lee, S.-S. (2017). Long-
term prediction of vehicle trajectory based on a deep
neural network. International Conference on Infor-
mation and Communication Technology Convergence
(ICTC).
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Mo, X., Xing, Y., and Lv, C. (2020). Interaction-aware
trajectory prediction of connected vehicles using cnn-
lstm networks. IECON The 46th Annual Conference
of the IEEE Industrial Electronics Society.
Richardos, D., Anastasia, B., Georgios, D., and Angelos, A.
(2020). Vehicle maneuver-based long-term trajectory
prediction at intersection crossings. IEEE 3rd Con-
nected and Automated Vehicles Symposium (CAVS).
Wilson, B., Qi, W., Agarwal, T., Lambert, J., Singh, J.,
Khandelwal, S., Pan, B., Kumar, R., Hartnett, A.,
Pontes, J. K., Ramanan, D., Carr, P., and Hays, J.
(2023). Argoverse 2: Next generation datasets for
self-driving perception and forecasting. arXiv preprint
arXiv:2301.00493. Proceedings of the Neural Infor-
mation Processing Systems Track on Datasets and
Benchmarks.
Zhang, T., Fu, M., Song, W., Yang, Y., and Wang, M.
(2020). Trajectory prediction based on constraints of
vehicle kinematics and social interaction. IEEE Inter-
national Conference on Systems, Man, and Cybernet-
ics (SMC).
Simultaneous Estimation of Driving Intentions for Multiple Vehicles Using Video Transformer
477
