
Multiple Multi-Modal AI for Semantic Annotations of 3D Spatial
Data
Lee Kent
a
, Hermenegildo Solheiro
b
and Keisuke Toyoda
c
Toyoda Lab, University of Tokyo, Tokyo, Japan
Keywords: Object Detection, Scene Understanding, Semantic Annotation.
Abstract: 3D reconstruction of physical environments presents significant challenges, particularly when it comes to the
semantic interpretation of these spaces, which often requires human input. This paper introduces a novel
process that leverages multiple AI models trained on 2D images to automatically interpret and semantically
annotate 3D spaces. Using a game engine as an intermediary, the process facilitates the integration of various
3D formats with 2D-trained AI models, enabling the capture and reprojection of semantic annotations back
into the 3D space. A representative 3D scene is employed to evaluate the system’s performance, achieving an
object identification accuracy of 87% alongside successful semantic annotation. By offloading semantic
annotation tasks to external 2D AI, this approach reduces the computational burden on edge devices, enabling
dynamic updates to the system’s internal knowledge base. This methodology enhances the scalability of
spatial AI, providing a more comprehensive understanding of 3D reconstructed environments and improving
the feasibility of real-time, AI-driven reasoning in spatial applications.
1 INTRODUCTION
A variety of sensors and techniques exist to capture
and digitally represent physical environments.
However, the process of accurately virtualizing the
physical world involves navigating numerous
challenging and often conflicting requirements. For
instance, trade-offs must be considered between
factors such as capture fidelity, coverage area, refresh
rate, the types of physical sensors employed, and the
utility of the resulting file format. The process of
translating the physical world into virtual
representations is commonly referred to as 3D
reconstruction (Han et al., 2021; Sun et al., 2021).
While numerous methods for 3D reconstruction
of physical spaces are available, some of which are
detailed in Section 2, few automated approaches go
further and integrate semantic data into these virtual
models. This integration, which could significantly
enhance the utility and understanding of
reconstructed scenes, remains largely unrealized. For
example, following the 3D reconstruction of an
interior using LiDAR data, the individual objects
within the geometry can be identified and labelled
a
https://orcid.org/0000-0001-8546-547X
b
https://orcid.org/0000-0002-0146-6684
c
https://orcid.org/0009-0009-4434-1329
with additional properties such as materials,
functional context or whether they are moveable. The
semantic knowledge increases the model’s utility as
an identified chair can be indexed for searchability,
extracted from the complete 3D reconstruction,
customised, moved, hidden, or replicated, enabling
advanced interaction and analyses.
The wide range of fundamentally different
formats and purposes means that systems with
general understanding of 3D spaces is a significant
challenge, and each different format may require a
completely different technique (Han et al., 2021).
This is made more prominent when considering how
AI models are trained and used. The data that an AI
is trained with must be interoperable with the test
data. For example, an AI trained only on point cloud
data will only be able to interpret point cloud data.
Being able to work beyond the constraints of
datatypes and sensors could prove invaluable when
trying to reconstruct 3D space. Figure 1 presents the
Figure 1: Towards 3D scene understanding.
308
Kent, L., Solheiro, H. and Toyoda, K.
Multiple Multi-Modal AI for Semantic Annotations of 3D Spatial Data.
DOI: 10.5220/0013235300003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 308-316
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
abstract steps required to achieve 3D scene
understanding. This paper assumes that the 3D scene
reconstruction is already complete and proposes a
filetype agnostic approach to deriving semantic data.
Large strides have been made recently with
regards to 2D image recognition in specific contexts,
such as object identification and relative localisation
using SLAM. In these areas AI has become quite
proficient, both in terms of capability and speed
(Gemini Team et al., 2024). This progress is enabled
by the much larger pools of images available for
training data, the equivalent of which does not exist
in 3D formats. This advancement of 2D
understanding of space can be leveraged in order to
increase understanding and interaction with 3D
spaces, and its value can be extended to domains such
as to facilitate XR interactions (Sun et al., 2021),
mechanical engineering (Kent et al., 2021), robotics
(Batra et al., 2020; Weihs et al., 2020), and spatial AI
(Hubert et al., 2021; Miyake et al., 2023).
This paper will describe a process to understand
any 3D room reconstruction in any data format,
employing several 2D image-based AI to identify and
tag objects in a 3D reconstructed space with semantic
information. The core contribution of this paper is the
process of using 2D projections in captured 3D space
to facilitate interpretation and reasoning of 3D spaces.
The paper will present an implementation of the
process for analysis and discussion.
This section has described the challenges with 3D
scene understanding, and how these challenges are
compounded by the need for many data formats for
3D reconstruction. Section 2 outlines current
capability for scene understanding and defines the
scope of this work. Section 3 details the proposed
process, a complete implementation, and a testing
scenario. Section 4 presents the findings and analyses
the capability of the demonstrated implementation,
along with discussion and iterations. This is followed
by a discussion on limitations and generalisability in
Section 5. The paper concludes with opportunities for
future work in Section 6.
2 RELATED WORKS
In this section, approaches to 3D reconstruction and
understanding will be described. Data representation
will be considered and compared against the depth of
understanding that can be achieved using them by AI,
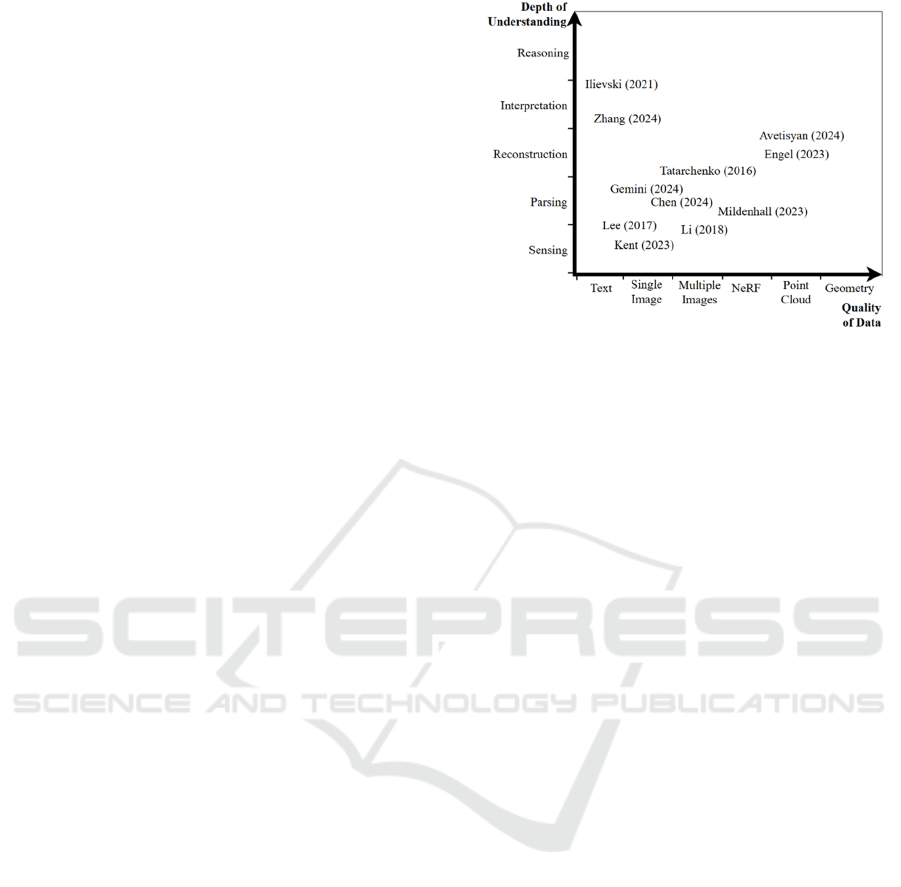
summarised in Figure 2. Typically, as the dataset
becomes richer, the depth of possible understanding
via AI decreases.
Figure 2: Mapping the related works quality of data used to
the depth of understanding achieved.
Currently, text-based representations offer the
best chance to enable implicit knowledge to be
inferred by AI through structured knowledge graphs.
Logic based tasks however, particularly with a
temporal element, are still very challenging for AI
(Jiang et al., 2023; Titus, 2024). Current methods
consolidate a variety of knowledge modelling
approaches in order to facilitate grounded contextual
and temporal reasoning for AI (Ilievski et al., 2021).
With methods to translate 3D space into semantic
knowledge graphs, this could be utilised to increase
an AI’s faculty of spatial reasoning.
Several approaches look to parse 3D information
from 2D images. For example, RoomNet (Lee et al.,
2017), attempts to estimate 3D room layout from single
2D images by identifying key points within the space.
Kent et al., (2023) propose identification of large
structures and assemblies through smaller or standard
components. This could be used to infer geometries of
a room as part of a larger process chain. Depth can only
be estimated in an image, so whilst identification of the
objects is possible under the right conditions, there is
no spatial or contextual interpretation or reasoning.
Li et al., (2018) uses silhouettes generated from
2D images to match to known object pools. By
estimating depth from RBG images and combining
multiple images, Tatarchenko et al., (2016), create
explicit and complete point clouds of objects,
although without explicit knowledge of what object is
being created. NeuralRecon (Sun et al., 2021) extend
this approach, and demonstrate real-time 3D
reconstruction of 3D surfaces from a singular
monocular video, analysed as a sequence of images.
Depth in estimated in each image individually,
leading to noisy outputs and redundant computation.
Work is also being done to understand 3D scenes
where unordered or raw 3D data is available, such as
Multiple Multi-Modal AI for Semantic Annotations of 3D Spatial Data
309
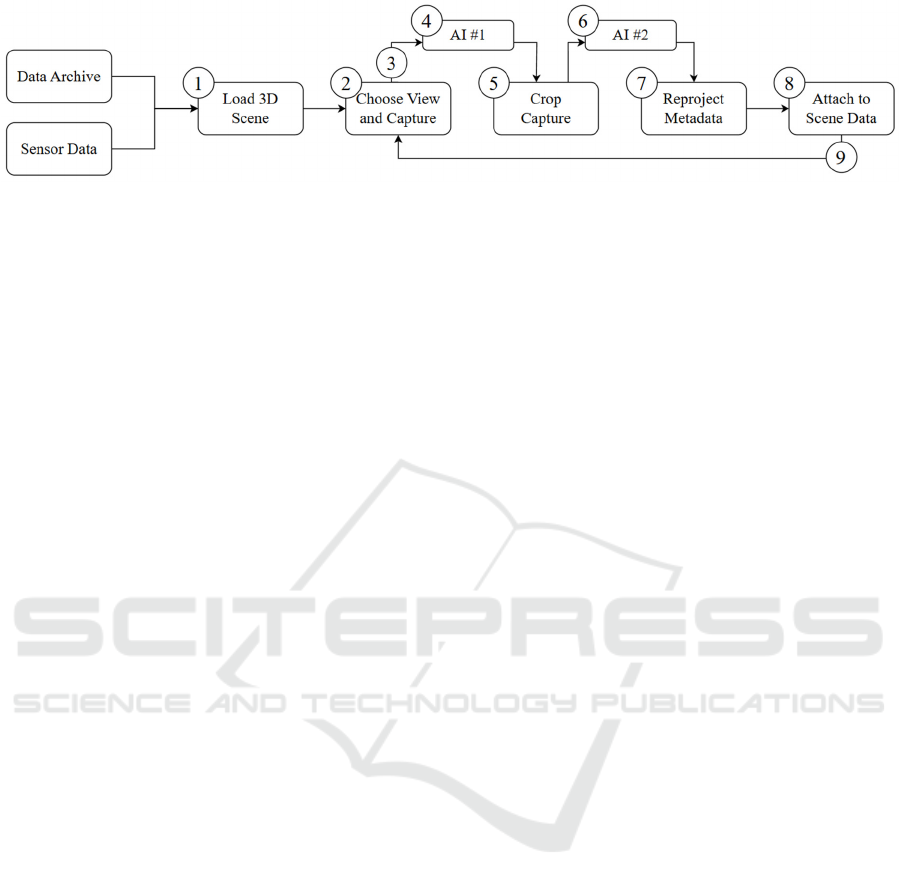
Figure 3: Process using multiple AI to develop scene understanding. The numbered steps are described in Table 1.
with point cloud captures. SceneScript (Avetisyan et
al., 2025) uses LLM style next token prediction in
order to describe point clouds as parametric
instructions. This is a lightweight approach to scene
definition, using high-level and interpretable
representations of the space. Synthetic point cloud
have been used as training data for an AI that can
generate 3D layout estimations within the bounds of
the parameters (Engel et al., 2023). This approach can
build simple models without contextual knowledge,
however manual extensions to achieve this has been
proven theoretically possible.
Neural Radiance Fields (NeRFs) have recently
gained significant attention (Mildenhall et al., 2022).
NERFs can render novel views by training a deep
neural network from a set of known camera poses. It
has been followed up by Gaussian Splatting (Chen &
Wang, 2024; Kerbl et al., 2023), which enables 3D
reconstruction from images, offering improvements
in computation speed and data size. Whilst these
methods provide dynamic and fast 3D reconstruction,
they are incompatible with current 3D understanding
methods.
When these myriad approaches are mapped, see
Figure 2, there is a disconnect between having high
quality data through 3D reconstruction, and the depth
of understanding. By reducing high quality data to
data that is compatible with AI models, the output
data can be reprojected into the reconstructed space.
In summary, 2D images have shown potential as
inputs for semantic understanding, but too much data
is required for a general AI capable of 3D scene
interpretation. Point clouds can be used to capture a
scene but are data heavy and lack semantic
understanding methods. NeRFs and Gaussian
Splatting have showed promise as a means to
represent 3D scenes (Chen & Wang, 2024), but the
generated views are assumed, and also with little
semantic understanding opportunities. This paper
presents a process that combines the speed and
opportunities for semantic understanding by
representing a 3D space as a series of 2D projections.
3 PROPOSED PROCESS
The process described in this paper uses a game
engine and a series of AI to parse and understand a
3D environment. The system will emulate egocentric
exploration of a 3D virtual scene, attempting to parse
and interpret the initially unidentified objects. Figure
3 shows the process being proposed, and Table 1
details each of the process steps.
This process shows two AI being used (Gemini
Team et al., 2023, 2024), but this can be extended,
and other AI can be substituted if required. The
important distinction is the use of parallel captures
being processed serially by AI, cropped, and
reprojected back into the 3D scene to develop spatial
understanding about the 3D scene. A prototype
system has been developed to explore how this
cropping and reprojection can be used in a 3D
reconstructed scene.
3.1 Prototype System
Two state of the art AI (Gemini Team et al., 2023,
2024), are utilised to infer details about the objects in
a 3D scene. These AI models are trained on 2D data,
allowing them to operate effectively with 2D images.
To leverage their capabilities, we will capture a series
of egocentric 2D images of the 3D scene.
Following evidence that cropping images to the
subject can increase the success and capability of zero
shot inference for Multimodal Large Language
Models (MLLMs) (Ilievski et al., 2021; Zhang et al.,
2024)
,
the first AI specifically identifies objects
within the capture and provides bounding boxes with
confidence values around any identified objects.
The initial capture is cropped to each bounding
box to ask more precise questions to a second AI,
which is able to infer more qualitative information
such as colour, function, and context. The second AI
is multimodal, accepting images and a text prompt for
specific information. This AI is unable to describe the
object location within the capture so to reproject the
data, the object must be central in the capture.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
310
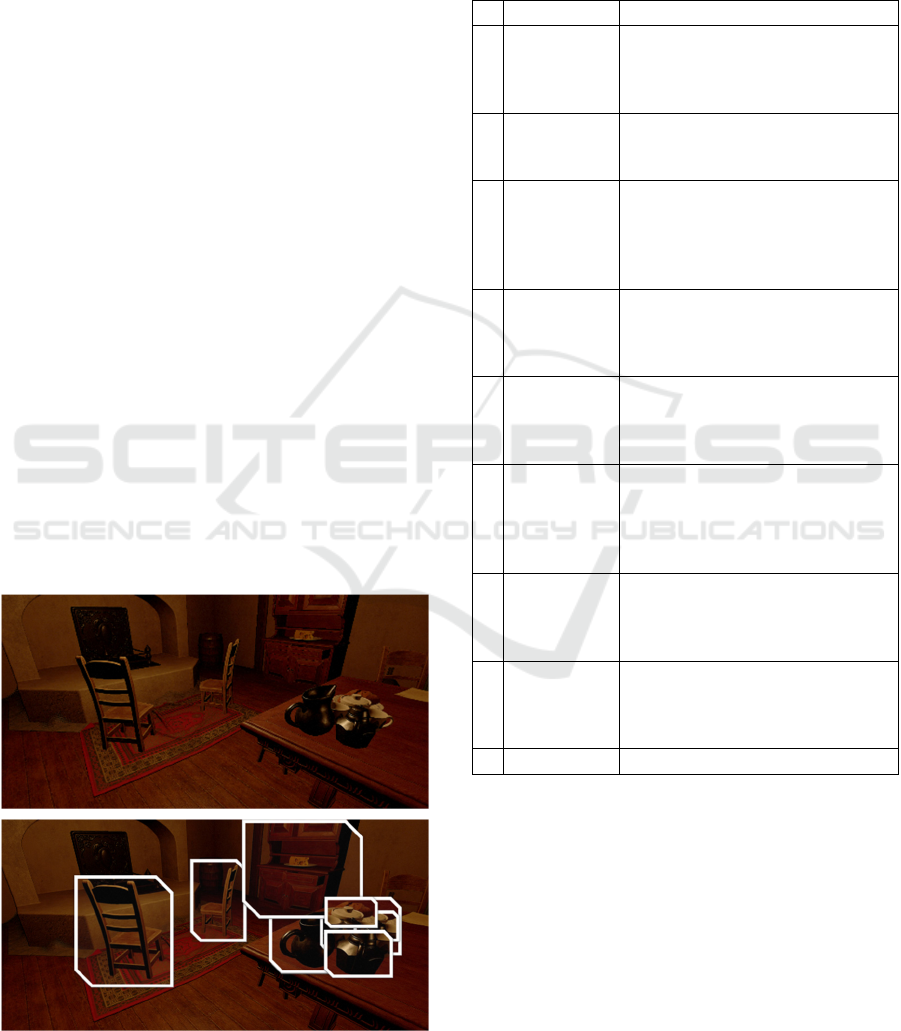
From Figure 4, examples of bounding boxes
leading to cropped images can be seen. These cropped
images are then sent to the second AI. The text
prompt uses the English order of adjectives list
(Cambridge Dictionary, 2024)
to populate semantic
data and is as follows:
“What do you see in this image? Be as specific as
possible. Return the results as a csv file in the format
‘object name, opinion, size, physical quality, shape,
age, colour, origin, material, type, purpose’.”
The use of a second AI allows for scene
understanding, supplementing the 2D capture with
semantic data and context. The response is then
reprojected back into 3D space and attached to the 3D
geometries. Table 1 gives a more detailed overview
of each step of the process and how it is implemented
in the prototype system.
3.2 Testing Scenario
A test scenario will be used to evaluate the viability
of using several multi-modal AI to generate data and
semantic data about a 3D scene. As this paper is not
concerned with the method for 3D reconstruction, an
existing scene with known geometries and collisions
for all objects will be used. This will ensure that the
reprojected response can be analysed for correctness.
The scene is a simple room with 68 internal and
identifiable objects. Exterior boundaries, such as
walls, floors, and ceilings are not identifiable by this
process. There are areas of cluttered objects, such as
items scattered on a table and books on a bookshelf.
Figure 4: Screenshot and resulting bounding boxes.
The process will run in batches of 75 cycles until
the results stabilise, to explore how the scene
understanding evolves over time. To understand the
capability of the scene identification process, a trial
run of 225 captures will be presented.
Table 1: Description of the complete process.
# Step Description
1 Load 3D
Scene
Any prior 3D reconstruction data is
loaded into the scene. In this
prototype, the 3D scene has
geometry and collision data.
2 Choose 2D
capture
position
A random position within the 3D
space is selected, emulating an
egocentric view.
3 Take 2D
Screenshot
From the chosen 3D position, a 2D
screenshot is taken. The image as
well as the camera parameters and
transform are both archived and
sent to AI #1.
4 Send to
AI #1
(Vision)
AI #1 identifies and segments
objects. The response is a series of
bounding boxes around objects see
(Figure 4).
5 Crop 2D
Capture
The screenshot in Step 3 is cropped
for each bounding box. Each
cropped image is sent to AI #2 with
a text prompt.
6 Send to
AI #2
(Gemini)
AI #2 can infer direct information
about a single object, such as name,
size, materials etc. As the image is
cropped, there should be a single
subject within each image.
7 Reprojection The response data is parsed. A ray
cast replicating the initial 2D
capture is used to reproject the
parsed data back into the 3D scene.
8 Attach to
scene
The parsed data is then attached as
metadata to any hit objects. The
data attachment method depends on
the 3D scene filetype.
9 Go to Step 2 Repeat until satisfied.
4 RESULTS
This section presents the outcomes of a pilot
implementation of the process. In Section 4.1, the
results are manually compared against known correct
values to evaluate the accuracy of object
identification. Section 4.2 explores the system’s
ability to measure self-confidence in its results
without human intervention. This is followed by
Section 4.3, which introduces an extension to enhance
the identification capabilities of the overall process.
Multiple Multi-Modal AI for Semantic Annotations of 3D Spatial Data
311

Finally, Section 4.4 evaluates the accuracy and
significance of the generated semantic data.
4.1 Identification Accuracy
Table 2 summarises the output of the test scenario as
the scene identification progressed. The first column
specifies the number of captures sent to AI #1. The
second column specifies the number of cropped
images that are then send to AI #2. Column three is
the number of identified objects by AI #2. Column
four is the number of discarded identifications. The
data from AI #2 is reprojected back into the 3D scene,
and if this ray does not hit viable geometry (e.g. a
wall, the floor), then it is discarded. Column 5 show
the number of successful object identifications.
Table 2: Number of captures sent to AI #1, cropped images
sent to AI #2, identifications, discarded results and
successful identifications.
Ca
p
tures Cro
p
s IDs Discards IDs
75 231 273 53 220
150 494 464 98 366
225 743 676 121 601
Figure 5 show the progression of object
identification. By increasing the number of scenes
captures, there is an increase in number of identified
objects. However, the objects that are challenging for
the AI to identify remain unidentified, even as the
number of captures increases. Between 150 and 225
cycles, only one more object was able to be identified.
The results in Figure 5 are manually checked for
accuracy. After 225 cycles; 28 of the 68 were never
identified, in that no data was reprojected to them.
This could be attributed to multiple factors and will
be discussed in Section 4.3.
4.2 Self-Confidence of Identification
Something unaccounted for in the colour maps in
Figure 5 is the self-confidence of the found values.
Self-confidence is the level of certainty in the
identification. This can manifest in multiple ways. A
chair that was correctly identified 23 times out of 23
appears in Figure 5 has the same 100% self-
confidence value as a book that was found once and
identified correctly once. This self-confidence value
needs to be measured, as the process should run
independently. Following the 225 cycles, three
factors limiting self-confidence have been identified.
These are:
Name synonyms (Section 4.2.1)
Many items in cropped images (Section 4.2.2)
Unidentifiable objects (Section 4.2.3)
After 75 cycles.
After 150 cycles
After 225 cycles
Green (Left) indicates 100% accurate identification,
Red (Right), 0%, and grey boxes are objects that were
never identified and had no attached data.
Figure 5: Progression of correct identification of 68 objects
in a 3D scene. Figure best viewed in colour.
4.2.1 Name Synonyms
As the results from AI #2 does not account for
synonyms of objects names, an object may be
correctly identified but not align with previous
identifications. For example, after 225 captures, the
‘sofa’ in the room was identified correctly 45/57
times, but using several different terms, see Table 3.
The most accurate ID, Chaise Lounge, is arguably the
most correct, but the other ‘correct’ identifications
will still reduce the overall confidence.
This discrepancy in not-false positives may be
overcome by calculating semantic distances between
words, and using that value to determine confidence
using knowledge graph networks such as WordNet
(Princeton University, 2010) or ConceptNet (Speer et
al., 2017).
Table 3: Differently correct identifications of the same
object.
Identified Name Count
Chaise Lounge 27
Sofa 14
Couch 3
Red Velvet Chai
r
1
4.2.2 Many Items in Cropped Images
Some objects were found to have a wide range of
conflicting identifications. This was particularly
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
312

prominent when the object was a container or a
surface. In these instances, the object was not the sole
subject of the cropped image, a known weakness
(Ilievski et al., 2021; Zhang et al., 2024). As the data
is attached to the scene using the centre of the cropped
image, this leads to incorrect attachments to
containers and surfaces.
In the test scene there are three tables. The self-
confidence was 18-21%, with a combined total of
14/72 correct identifications. From Table 4, it is clear
that the objects on and around the tables are being
associated with the tables, significantly reducing the
overall confidence.
Table 4: Identifications and their relation to the attached
object.
Named object in identification is:
Correct On Table Next to Table
Table 1 3 1 10
Table 2 7 23 8
Table 3 4 9 7
This error could be overcome by adding a
decision point at Step 7 in Figure 3. In the case where
multiple items are identified in the cropped image; the
cropped image could be resubmitted to AI #1 to
further reduce into sub-images. This would help
remove the objects on and around the table from the
tables ID data.
On inspection of all 14 correct table
identifications in Table 4, it was never the sole subject
of a cropped response. This means that adding
cropped images with multiple IDs back into the pool
would remove any chance of identifying a container
or surface. This would require the use of a second
prompt targeted at surfaces and containers.
Alternatively, objects with high self-confidence could
be removed from the scene.
Figure 6: Top-down view of the scene used in the test
scenario. Each represents a reprojection of semantic data
into 3D space from a capture position. Best viewed in
colour.
4.2.3 Unidentifiable Objects
There are some objects that AI cannot or cannot
consistently identify. This can be for myriad reasons,
such as not being in a capture, poor, missing, or noisy
input data, occlusion, or the object is simply not in the
AIs capability to identify.
After 250 captures, the remaining 28 unidentified
objects are all small objects that occlude each other,
for example stacks of books or plates under cups.
Manually selecting ideal screenshots have shown that
under the right conditions, the objects can all still be
identified correctly. The current capture selection
algorithm selects random positions and rotations
within the space. Replacing this randomness with a
more structured approach is expected to improve the
overall effectiveness of the process.
4.3 Informed Capture Selection
Until now, the selection of views for captures has
been random. Low self-confidence can be added as
weighted selection criteria to the capture selection
step. The self-confidence of each object is calculated,
and the less self-agreement there is in within the data
attached to an object, the more likely it should be
within the next captures frame. This was achieved by
finding the closest object in the lowest 5% of self-
confidence and linearly interpolating the camera
transform towards the object.
The extension was run for a further 75 captures.
This led to the identification of a further 25% of the
objects, with 87% of the objects in the room now
being identified with 59% having self-confidence in
the ID over 50%. Figure 7 shows the small effective
difference between correct identification percentage
and self-confidence in identification after 300 cycles.
The objects with zero correct identifications after
300 cycles are a book, a carpet, 2 plates, 3 flowers, 3
pieces of paper and a vase. Most of these can be traced
down to occlusion, something that cannot be
overcome using optical sensors for 3D reconstruction.
The books spine is difficult to differentiate against the
other books. The flower stems are thin, so it is
unsurprising that the raycasts consistently ‘missed’
the location, hitting the out of bounds exterior walls.
The paper and vase not being identified are outliers,
without an apparent reason the AI could not identify
them. Possibly, they were unfortunate and not
included in any capture, or the AI is simply unable to
identify them, even under perfect conditions. The
extension to the informed capture selection ensured
that the objects and areas with less self-confidence
Multiple Multi-Modal AI for Semantic Annotations of 3D Spatial Data
313

were given focus and this had a clear impact on the
results, improving the viability of the approach.
4.4 Capturing Semantic Data
The final part of this section concerns the capture of
additional semantic data, providing additional
meaning and context to the identified geometry. More
than being able to identify the information, it is
valuable to capture tacit information. Recent
advances in 2D AI have begun to facilitate this
(Gemini Team et al., 2024).
For this proof of concept, the English order of
adjectives was used to get additional information
about the seen objects (Cambridge Dictionary, 2024).
The size of the object was generally always in self-
agreement, despite only being able to assume the
scale. A giant apple would likely still be classified as
small. Interestingly, the 2D AI occasionally tried to
give specific dimensions, which unsurprisingly were
nowhere close to accurate.
Physical quality typically described the surface of
the object, or for around half of instances simply said
‘solid.’ Shape, Age and Origin were either ‘unknown’
or incorrect guesses and were included for
completeness.
The Material of each object was identified, but in
vague categories, such as ‘Wood’ or ‘Ceramic,’
without specifics such as grain or deterioration. When
paired with colour or other semantic data, realistic or
predefined textures could be applied as part of a 3D
reconstruction process, using textures and materials
applied from 3D libraries.
Type and Purpose provide means to categorise the
objects further. Automatic identification is helpful,
but being able to further contextualise the objects can
provide more rich value, for example in the push for
spatially aware AI. For instance, correct barrels
identifications also supplied a range of additional
semantic information such as: ‘container, cask,
storage, to store liquids, for transport.’
Spatial arrangements were also able to be
identified with an addition to the prompt: ‘positional
relationships between the objects. Adjacencies and
relative positions can be helpful when providing
instructions on how to achieve tasks, for example to
direct towards a specific location ‘on a table’ or
‘opposite the doorway.’ The spatial arrangements
must be captured before the cropping step, but then
processed and attached to the data after the cropping
step. In future work, the combinatorial use of this
semantic data will be used as input for Spatial AI with
faculty for 3D spatial reasoning. This will be
described in Section 6.
Successful identification of 68 objects after 300 process
cycles.
Self-confidence in identification of 68 objects after 300
process cycles.
Green (Left) indicates 100% accurate identification, red,
0%, and grey boxes were never identified and had no
attached data.
Figure 7: Comparing the difference between successful
identification and self-confidence in that identification after
300 cycles.
5 LIMITATIONS
In this section, we discuss the generalisability and the
limitations of the process and the study.
One of the key challenges for scene identification
is the considerable number of representations and
filetypes for 3D spaces. The process in Figure 3 is
datatype agnostic, assuming the datatype can be
loaded into a game engine. For this testing scenario,
a scene with separate geometries for each object was
utilised.
A common datatype for this kind of scene is point
clouds, due to the range of sensors available. For
example, many VR headsets have on board point
cloud sensors that are used for localisation. The
proposed process in this paper could be run on these
point clouds dynamically.
The attachment of data to the 3D file will remain
datatype dependant. For example, instead of a
raycast, a mask will be required for a point cloud, and
the reprojection of semantic data will need to be
associated with all points within the mask
reprojection. This could significantly impact storage
requirements if not managed appropriately.
Only one room was tested for this pilot, to explore
the feasibility of the approach, focusing on depth of
analysis and challenges. By running the process on
many rooms in different configurations and from
various origins, the potential of this approach can be
further scrutinised and improved.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
314

The AIs used is also limiting factor. They can
only identify objects that they are trained to identify
and that have sufficient representation in the training
data. The process should be AI agnostic, using web
interfaces to connect to two AIs with differing
capabilities. There are alternative AI candidates that
could be used (Kirillov et al., 2023; Redmon et al.,
2016). The novelty of this papers is the dynamic
cropping procedure and the reprojection back into the
scene.
Finally, offloading the processing to external
servers, which involves streaming 3D scenes and the
people within them, conflicts with privacy
protections. Consequently, many HMDs by default
do not allow capture or recording of passthrough
sensors. Whilst enabling this capability unlocks many
opportunities, it requires strict adherence to privacy
regulations which are foundational to protect
individual rights, and maintaining public trust must
be a priority in all applications.
6 CONCLUSIONS
Multiple multi-modal AI were used that had different
inputs and differing capabilities. Both are only
capable with 2D images; however, their
combinatorial use enabled the identification of
objects in 3D space. After 300 cycles 87% of objects
were correctly identified, albeit because of noun
synonyms, only 59% having self-confidence over
50%. Semantic data was also captured, providing a
range of descriptors, object use and positional
relationships to other objects.
A Game Engine acted as the intermediary system,
with the ability to load many 3D formats and to
interface with cloud-based AI systems. The addition
of weighted capture selection towards objects with
lower self-confidence improved the process.
The semantic data was reprojected back into 3D
space and attached to the objects in the scene. Objects
with predefined geometries and collisions were used
in this study, but the process could be extended to
other datatypes, for example, using masks and point
clouds. The value of the process is the reprojection
and attachment of the 2D AI findings back into 3D
space, utilising 2D AI capabilities in 3D contexts.
6.1 Future Work
Through this paper, several opportunities for future
work have been identified. The process can be
improved with an additional step to ensure that
exteriors, surfaces, and containers are appropriately
identified. The outcomes may also be improved by
using semantic closeness of the AI responses, to have
more representative and accurate self-confidence
measures.
Other datatypes should also be considered, such
as NeRFs and point cloud clouds. This approach is
suitable for any 3D datatype interoperable with games
engines but has only been implemented using a scene
with static geometries. The tagging process will
depend on the datatype.
Substantial work is being conducted in areas such
as multi-modal large language models, commonsense
reasoning and spatial AI, that look to facilitate and
enhance everyday tasks. This process of dynamically
interpreting 3D scenes and translating to human
readable semantic information can serve as spatial
inputs to these advanced and complex models.
ACKNOWLEDGEMENTS
The authors would like to thank the Common Ground
Living Lab members for their support.
REFERENCES
Avetisyan, A., Xie, C., Howard-Jenkins, H., Yang, T.-Y.,
Aroudj, S., Patra, S., Zhang, F., Frost, D., Holland, L.,
Orme, C., Engel, J., Miller, E., Newcombe, R., &
Balntas, V. (2025). SceneScript: Reconstructing Scenes
with an Autoregressive Structured Language Model.
Computer Vision – ECCV 2024, 15119, 247–263.
https://doi.org/10.1007/978-3-031-73030-6_14
Batra, D., Chang, A. X., Chernova, S., Davison, A. J., Deng,
J., Koltun, V., Levine, S., Malik, J., Mordatch, I.,
Mottaghi, R., Savva, M., & Su, H. (2020).
Rearrangement: A Challenge for Embodied AI
(arXiv:2011.01975). arXiv. http://arxiv.org/abs/2011.
01975
Cambridge Dictionary. (2024). Order of adjectives.
https://web.archive.org/web/20240404112407/https://d
ictionary.cambridge.org/grammar/british-grammar/adj
ectives-order
Chen, G., & Wang, W. (2024). A Survey on 3D Gaussian
Splatting (arXiv:2401.03890). arXiv. http://arxiv.org/
abs/2401.03890
Engel, J., Somasundaram, K., Goesele, M., Sun, A.,
Gamino, A., Turner, A., Talattof, A., Yuan, A., Souti,
B., Meredith, B., Peng, C., Sweeney, C., Wilson, C.,
Barnes, D., DeTone, D., Caruso, D., Valleroy, D.,
Ginjupalli, D., Frost, D., … Newcombe, R. (2023).
Project Aria: A New Tool for Egocentric Multi-Modal
AI Research. https://doi.org/10.48550/ARXIV.2308.1
3561
Multiple Multi-Modal AI for Semantic Annotations of 3D Spatial Data
315

Gemini Team, Anil, R., Borgeaud, S., Alayrac, J.-B., Yu,
J., Soricut, R., Schalkwyk, J., Dai, A. M., Hauth, A.,
Millican, K., Silver, D., Johnson, M., Antonoglou, I.,
Schrittwieser, J., Glaese, A., Chen, J., Pitler, E.,
Lillicrap, T., Lazaridou, A., … Vinyals, O. (2023).
Gemini: A Family of Highly Capable Multimodal
Models. https://doi.org/10.48550/ARXIV.2312.11805
Gemini Team, Reid, M., Savinov, N., Teplyashin, D.,
Dmitry, Lepikhin, Lillicrap, T., Alayrac, J., Soricut, R.,
Lazaridou, A., Firat, O., Schrittwieser, J., Antonoglou,
I., Anil, R., Borgeaud, S., Dai, A., Millican, K., Dyer,
E., Glaese, M., … Vinyals, O. (2024). Gemini 1.5:
Unlocking multimodal understanding across millions of
tokens of context. https://doi.org/10.48550/ARXIV.240
3.05530
Han, X.-F., Laga, H., & Bennamoun, M. (2021). Image-
based 3D Object Reconstruction: State-of-the-Art and
Trends in the Deep Learning Era. IEEE Transactions
on Pattern Analysis and Machine Intelligence, 43(5),
1578–1604. https://doi.org/10.1109/TPAMI.2019.2954
885
Hubert, T., Schrittwieser, J., Antonoglou, I., Barekatain,
M., Schmitt, S., & Silver, D. (2021). Learning and
Planning in Complex Action Spaces. International
Conference on Machine Learning. https://doi.org/
10.48550/ARXIV.2104.06303
Ilievski, F., Szekely, P., & Zhang, B. (2021). CSKG: The
CommonSense Knowledge Graph. In R. Verborgh, K.
Hose, H. Paulheim, P.-A. Champin, M. Maleshkova, O.
Corcho, P. Ristoski, & M. Alam (Eds.), The Semantic
Web (Vol. 12731, pp. 680–696). Springer International
Publishing. https://doi.org/10.1007/978-3-030-77385-
4_41
Jiang, Y., Ilievski, F., Ma, K., & Sourati, Z. (2023).
BRAINTEASER: Lateral Thinking Puzzles for Large
Language Models (arXiv:2310.05057). arXiv.
http://arxiv.org/abs/2310.05057
Kent, L., Snider, C., Gopsill, J., Goudswaard, M., Kukreja,
A., & Hick, B. (2023). A Hierarchical Machine
Learning Workflow for Object Detection of
Engineering Components. Proceedings of the Design
Society, 3, 201–210. https://doi.org/10.1017/pds.20
23.21
Kent, L., Snider, C., Gopsill, J., & Hicks, B. (2021). Mixed
reality in design prototyping: A systematic review.
Design Studies, 77, 101046. https://doi.org/10.1016/
j.destud.2021.101046
Kerbl, B., Kopanas, G., Leimkühler, T., & Drettakis, G.
(2023). 3D Gaussian Splatting for Real-Time Radiance
Field Rendering. https://doi.org/10.48550/ARXIV.23
08.04079
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C., Lo,
W.-Y., Dollár, P., & Girshick, R. (2023). Segment
Anything (Version 1). arXiv. https://doi.org/10.48550/
ARXIV.2304.02643
Lee, C.-Y., Badrinarayanan, V., Malisiewicz, T., &
Rabinovich, A. (2017). RoomNet: End-to-End Room
Layout Estimation. https://doi.org/10.48550/ARXIV.
1703.06241
Li, K., Garg, R., Cai, M., & Reid, I. (2018). Single-view
Object Shape Reconstruction Using Deep Shape Prior
and Silhouette. https://doi.org/10.48550/ARXIV.1811.
11921
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., & Ng, R. (2022). NeRF:
Representing scenes as neural radiance fields for view
synthesis. Communications of the ACM, 65(1), 99–106.
https://doi.org/10.1145/3503250
Miyake, Y., Toyoda, K., Takashi, K., Hyodo, A., & Seiki,
M. (2023). Proposal for the Implementation of Spatial
Common Ground and Spatial AI using the SSCP
(Spatial Simulation-based Cyber-Physical) Model.
2023 IEEE International Smart Cities Conference
(ISC2), 1–7. https://doi.org/10.1109/ISC257844.2023.
10293487
Princeton University. (2010). About WordNet.
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You Only Look Once: Unified, Real-Time Object
Detection. 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), 779–788.
https://doi.org/10.1109/CVPR.2016.91
Speer, R., Chin, J., & Havasi, C. (2017). ConceptNet 5.5:
An Open Multilingual Graph of General Knowledge.
Proceedings of the AAAI Conference on Artificial
Intelligence, 31(1). https://doi.org/10.1609/aaai.v31i1.
11164
Sun, J., Xie, Y., Chen, L., Zhou, X., & Bao, H. (2021).
NeuralRecon: Real-Time Coherent 3D Reconstruction
from Monocular Video. https://doi.org/10.48550/
ARXIV.2104.00681
Tatarchenko, M., Dosovitskiy, A., & Brox, T. (2016).
Multi-view 3D Models from Single Images with a
Convolutional Network. In B. Leibe, J. Matas, N. Sebe,
& M. Welling (Eds.), Computer Vision – ECCV 2016
(Vol. 9911, pp. 322–337). Springer International
Publishing. https://doi.org/10.1007/978-3-319-46478-
7_20
Titus, L. M. (2024). Does ChatGPT have semantic
understanding? A problem with the statistics-of-
occurrence strategy. Cognitive Systems Research, 83,
101174. https://doi.org/10.1016/j.cogsys.2023.101174
Weihs, L., Salvador, J., Kotar, K., Jain, U., Zeng, K.-H.,
Mottaghi, R., & Kembhavi, A. (2020). AllenAct: A
Framework for Embodied AI Research
(arXiv:2008.12760). arXiv. http://arxiv.org/abs/2008.1
2760
Zhang, H., Du, W., Shan, J., Zhou, Q., Du, Y., Tenenbaum,
J. B., Shu, T., & Gan, C. (2024). Building Cooperative
Embodied Agents Modularly with Large Language
Models (arXiv:2307.02485). arXiv. http://arxiv.org/
abs/2307.02485
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
316
